こちらは新しい記事のシリーズで、TRIOのをMotion Perfect 5利用し記事を展開します。最初にツールのインストール・簡単操作とプロジェクト作成から始めます。
さ、始めよう!

TRIO?
Trio Motion Technologyは、モーションコントローラのメーカーとして1987年に設立された。現在では、モーション・コーディネーターのブランドで、サーボモーター、ステッピングモーター、ピエゾモーター、油圧システムを最大128軸まで制御することができます。トリオのモーションプログラミングの専門知識は、Motion-iXテクノロジーに基づいています。

Motion Perfect 5
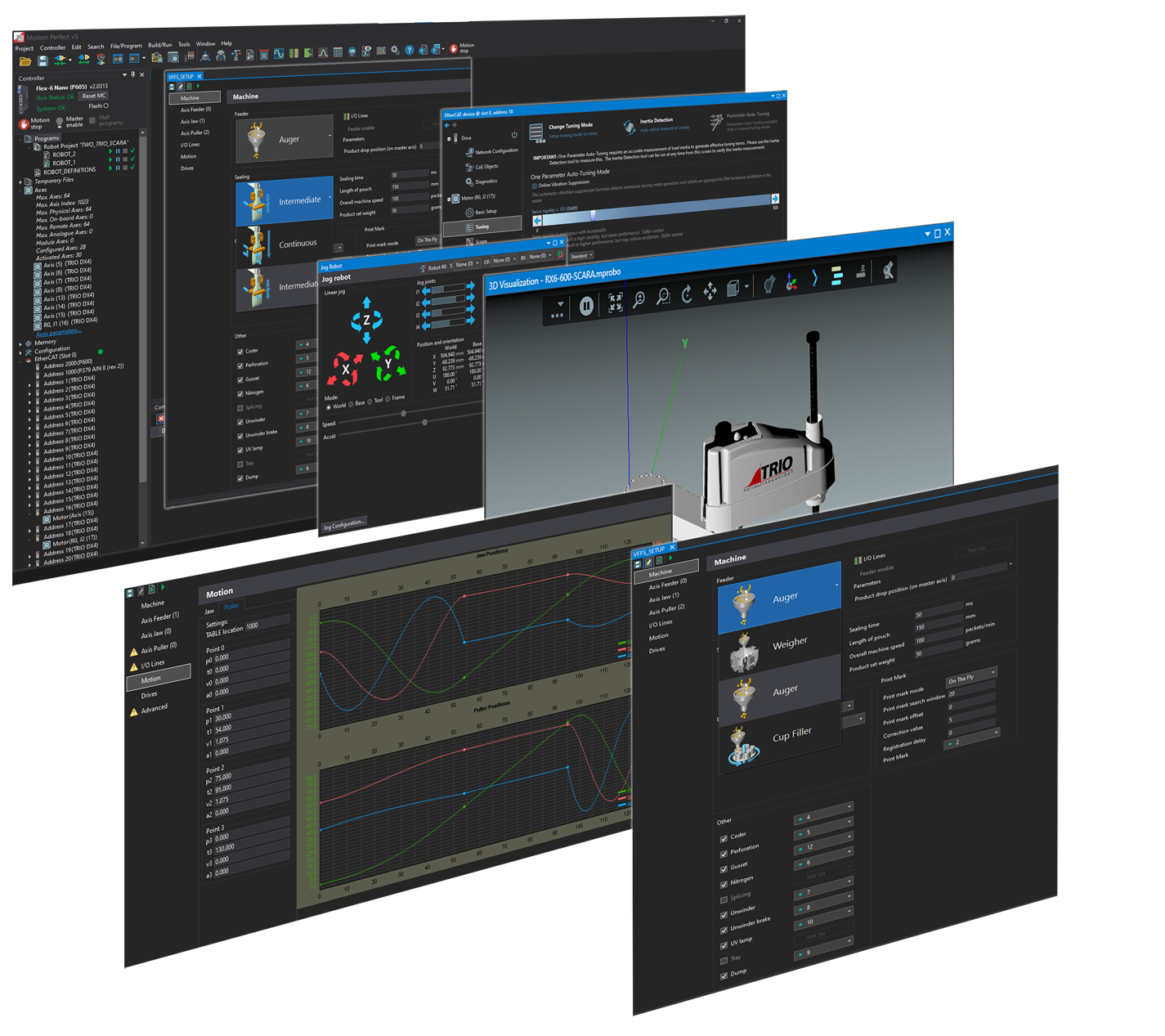
Motion Perfectは、ドライブ、コントローラ、HMIの設定とセットアップを含む、迅速なアプリケーション開発のための分かりやすいインターフェースをユーザーに提供します。
すべてのMotion-iX言語でのプログラム開発とデバッグのためのIDE、マルチページHMI画面開発、機械試運転のための診断ツールなど、完全な機能を備えています。Motion Perfect は、1つのソフトウェアパッケージで完全な機械セットアップを可能にします。
また、TrioのMotion-iX core technologyをベースに開発されており、アプリケーションの迅速な開発、コントローラやドライブの設定、機能のモニタリングのためのわかりやすいインターフェースを提供します。
Motion Perfect 5 には、IEC 61131、PLCopen、ロボットソリューション TrioRPS へのアクセスが含まれています。このバージョンでは、3Dオシロスコープを含む高度な可視化と、プロジェクトのIP保護もアップグレードされています。
当然、Motion Perfectのダウンロードと使用は無料です。
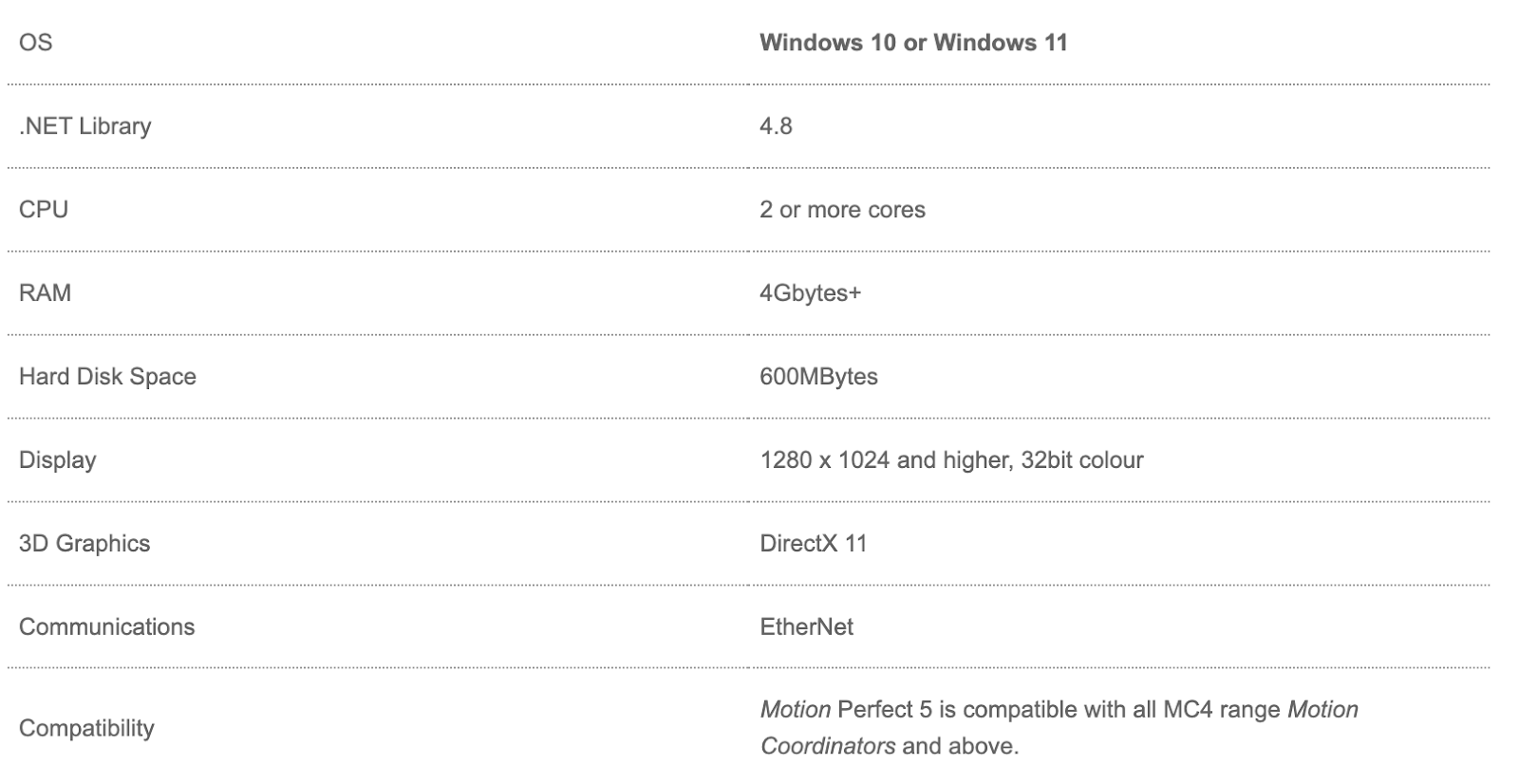
こちらはMotion Perfect 5ソフトウェアの最低PC要求です。
MC400 Simulator
MC400 Simulatorは、Microsoft Windows™ ベースのPC用アプリケーションで、Trio Motion Technology社の開発ソフトウェアMotion Perfect 5と組み合わせて使用するように設計されています。ハードウェアを購入することなく、Trio Motion TechnologyのマルチタスクモーションコーディネータMC4シリーズのソフトウェアシミュレーションを提供します。
Download Tools
TRIOのHPをからMotion Perfect 5のセットアップFileをDownloadしましょう。

Installation
先ほどTRIO HPからDownloadしたセットアップFileを起動します。

ライセンスに同意し、Instalで進みます。
しばらく待ちます…
MC400 Simulatorの使用ライセンスに同意し、Installで進みます。

しばらく待ちます…
Done!
これでセットアップが完成です。
Start your Applications!
TRIO Motion Perfect 5アプリケーションを起動します。

Done!
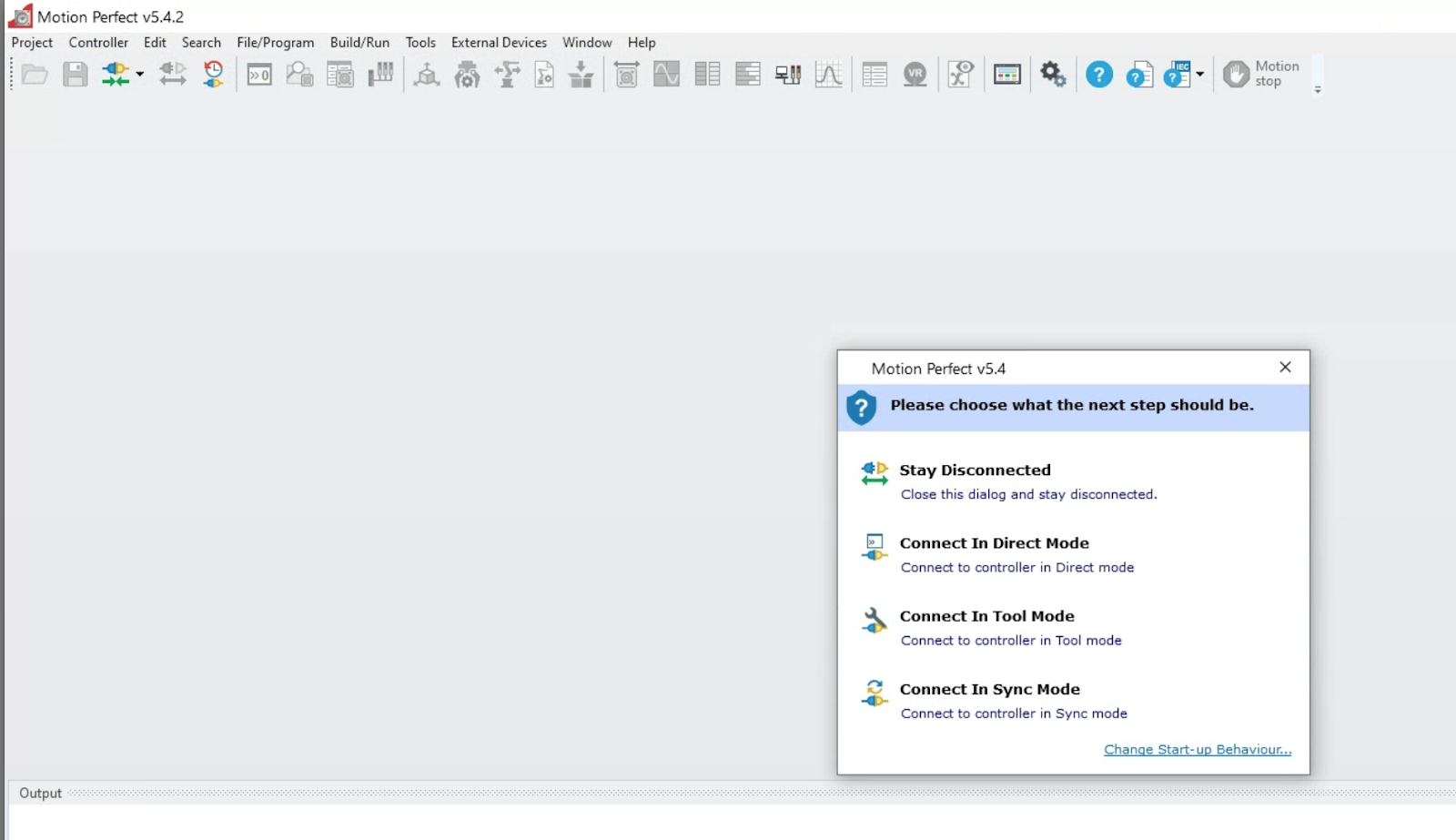
Stay Disconnectedをクリックします。
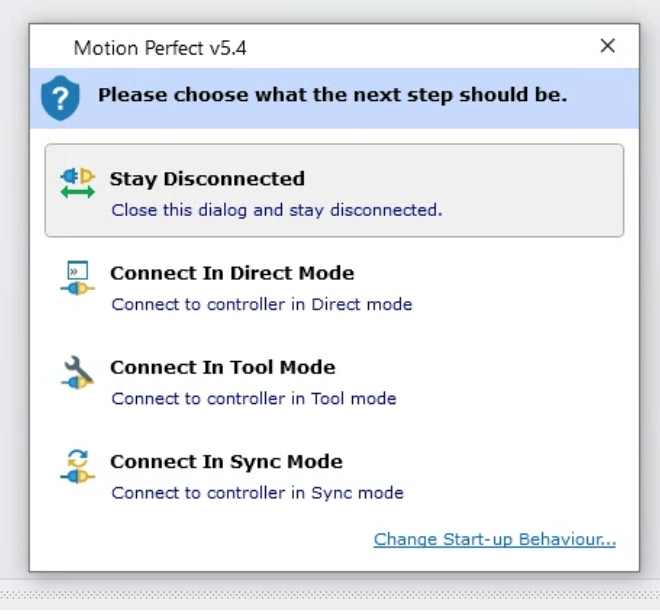
これでControllerと切断した状態になります。
New Application
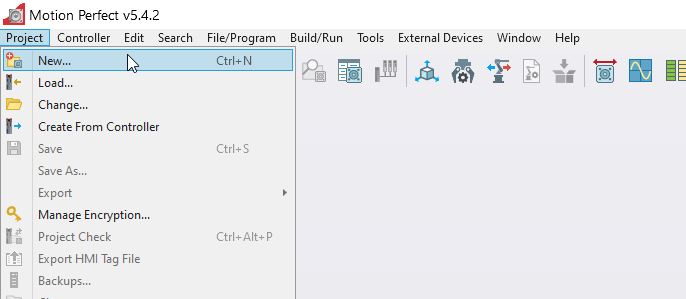
Project>Newで新規プロジェクトを追加します。
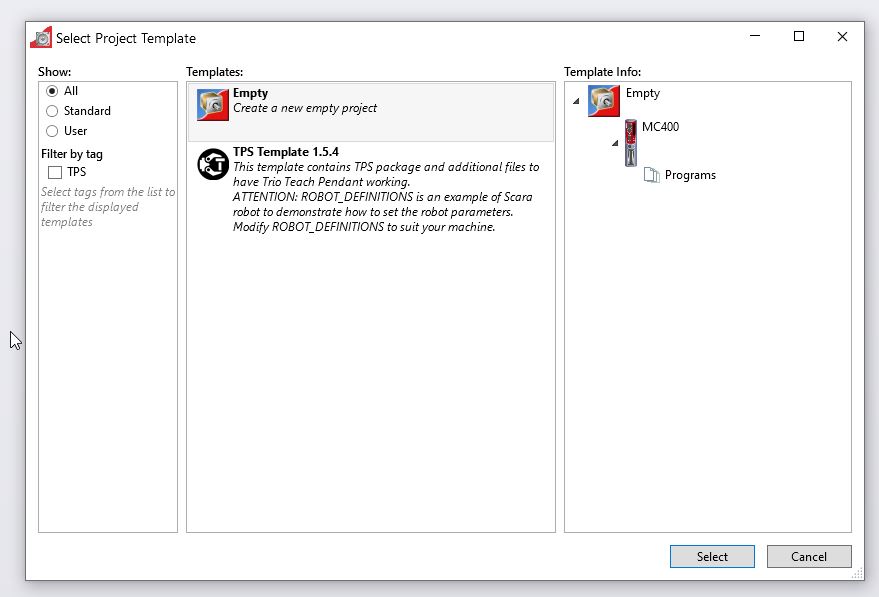
Empty>MC400を選び>Selctで進みます。
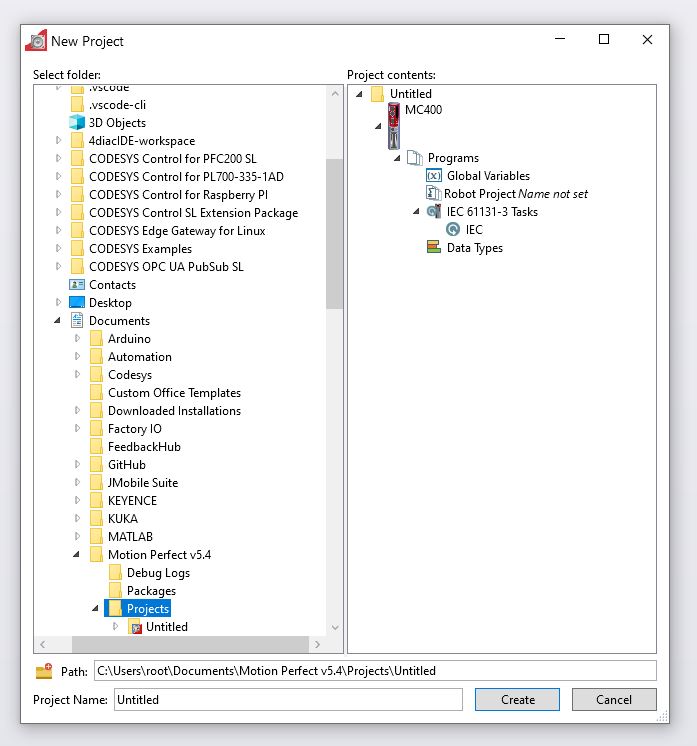
Createで新規プロジェクトを作成しましょう。
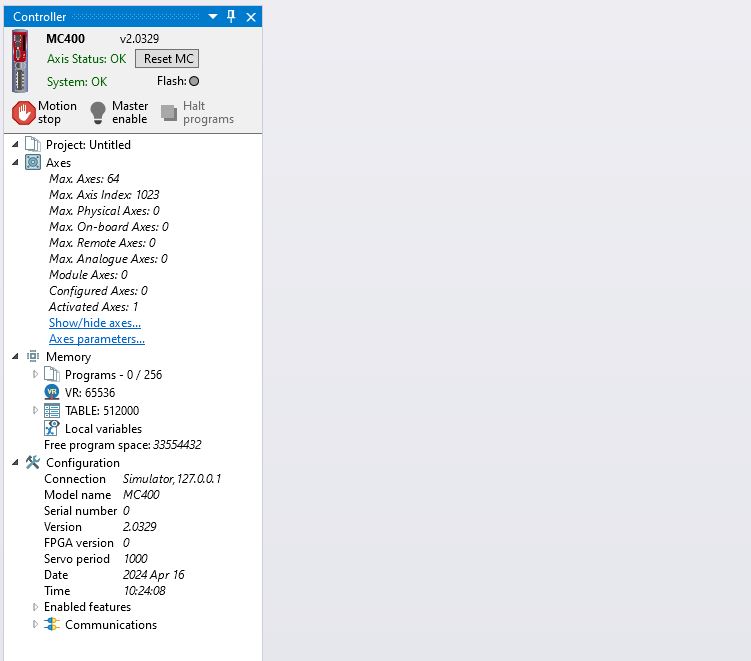
Done!
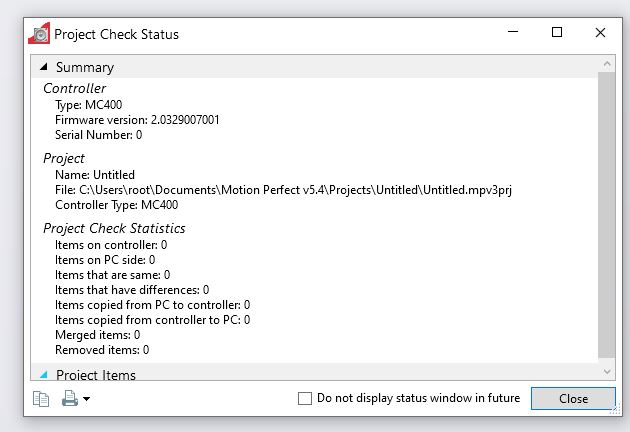
これで新しいプロジェクトが作成されました。
New IEC 61131-3 Program
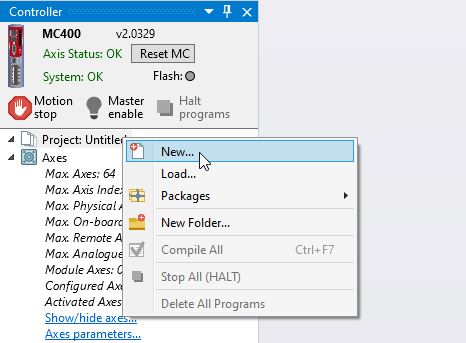
新しいIEC61131-3プログラムを追加するため、Project>Newをクリックします。
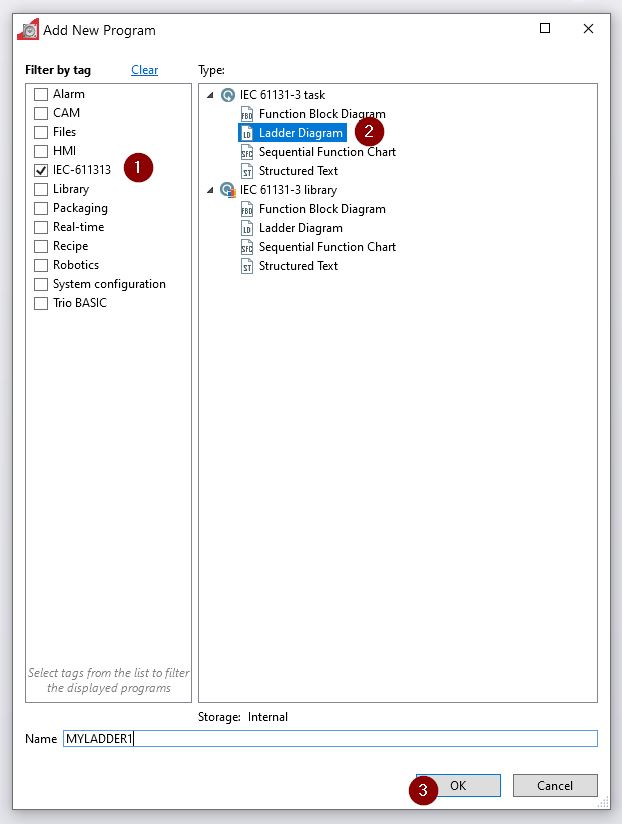
こちらは新規プログラムの追加画面になります。
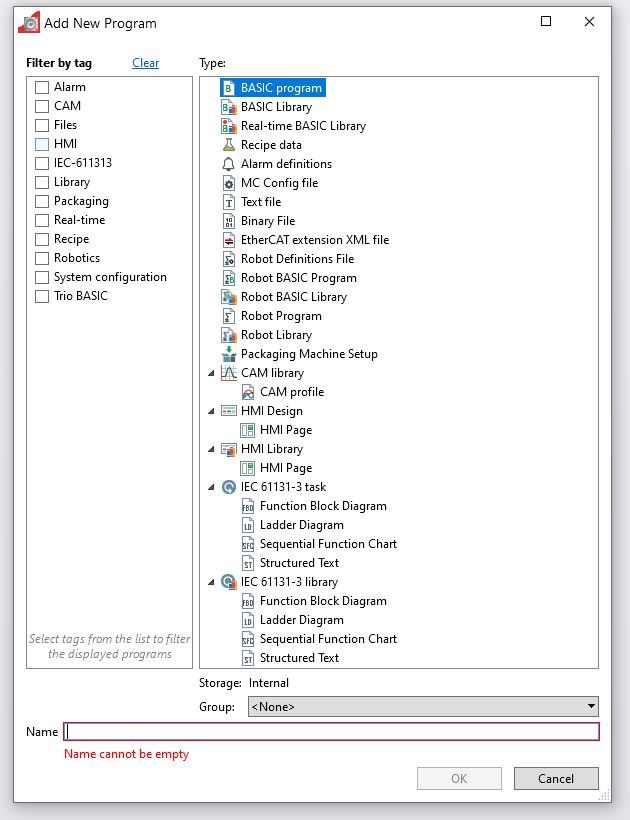
IEC-611313を選択し>IEC61131-3 task>Ladder Diagramを選び>OKします。
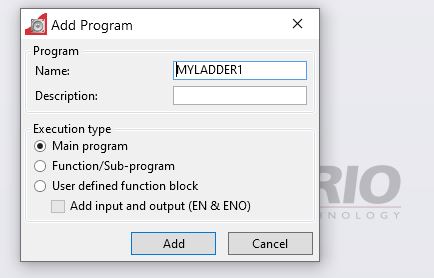
プログラム名を設定し、Addします。
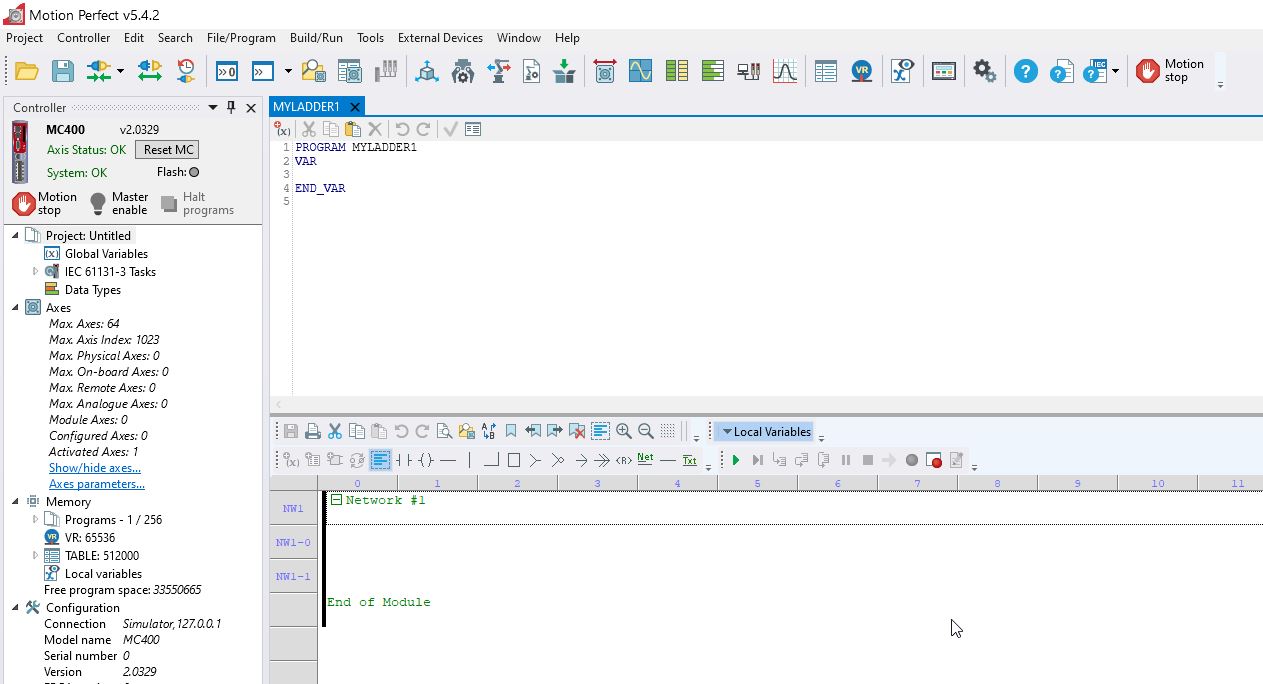
Done!IEC61131-3のラダープログラムが追加されました。
Define Variables
変数の定義やプログラムもIEC-61131-3に準じますが、赤枠のボタンをクリックしテキストで変数定義するか、Tableで変数定義するかを切り替えることができます。
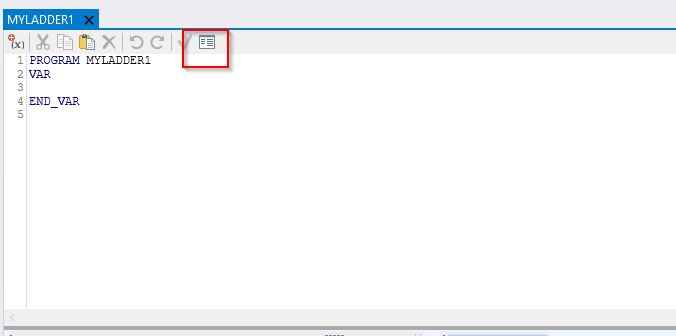
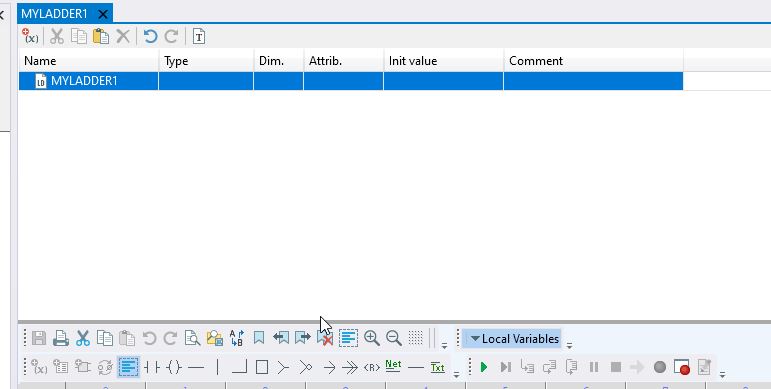
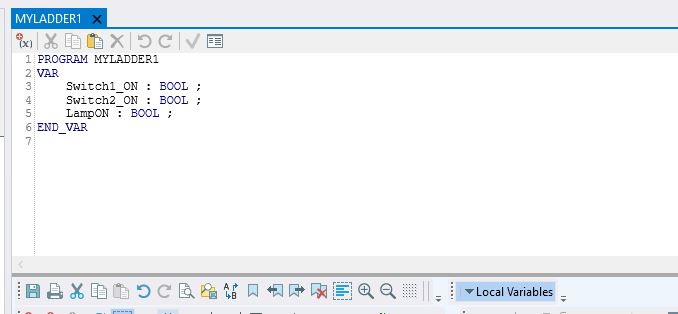
今回の記事ではテキストで変数を定義します。
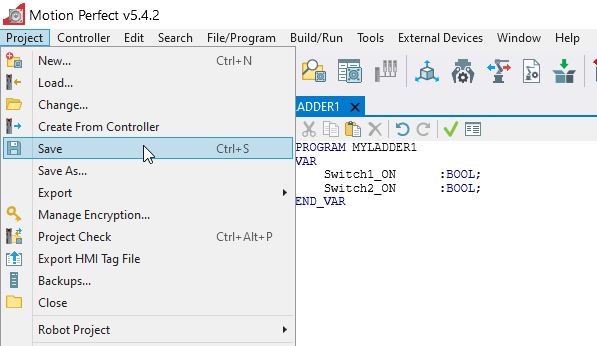
Save
Project>Saveでプロジェクトを保存しましょう。
Add New Network
次はプログラムを作成します。Network#1を選択し>右クリック>Networkをクリックします。
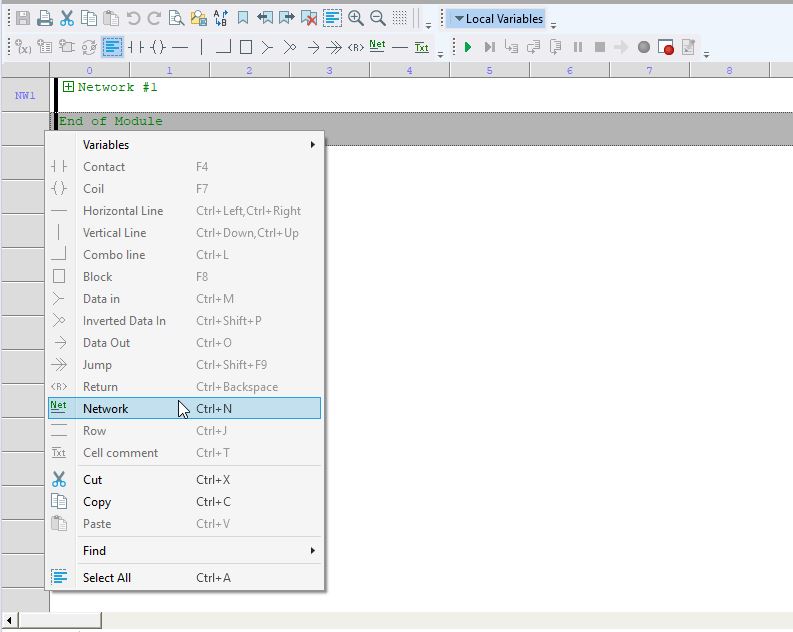
新しいNetworkが追加されました。
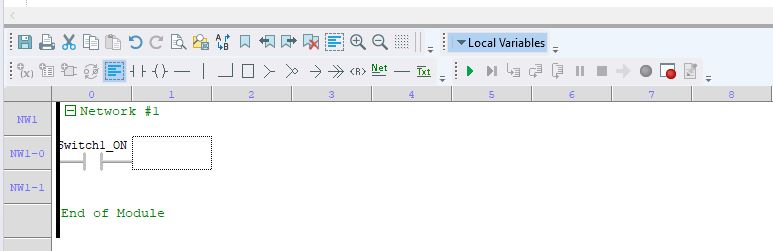
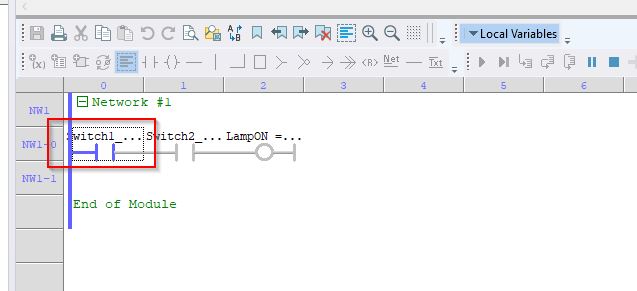
Add NO Contact
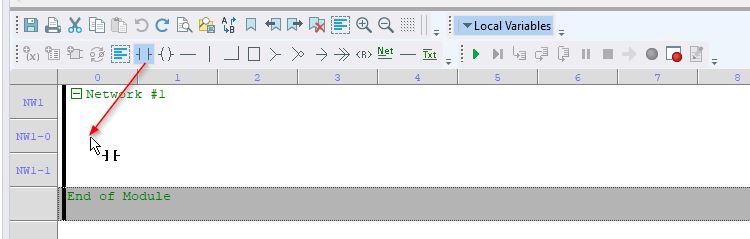
ToolbarからNO ContactをNetworkに追加します。
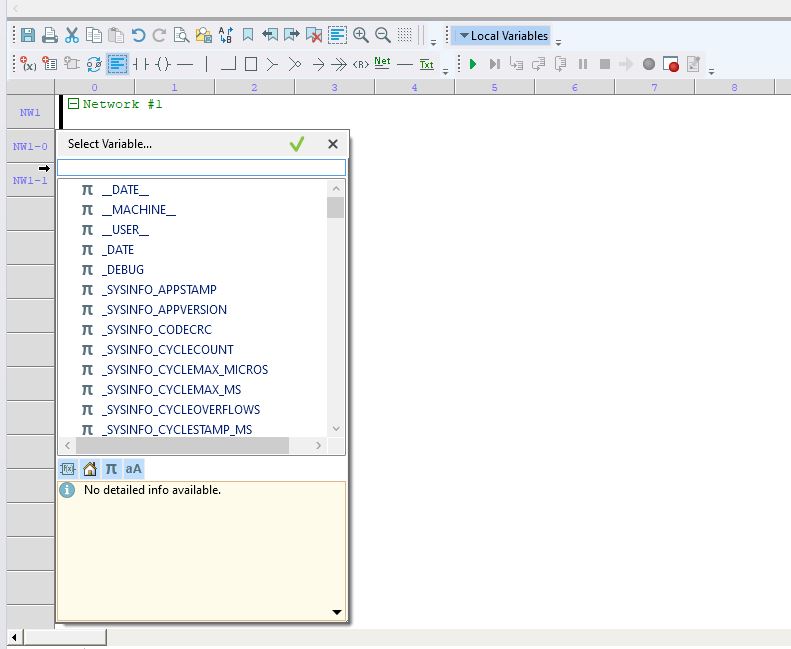
変数の選択Windowsが表示されます。
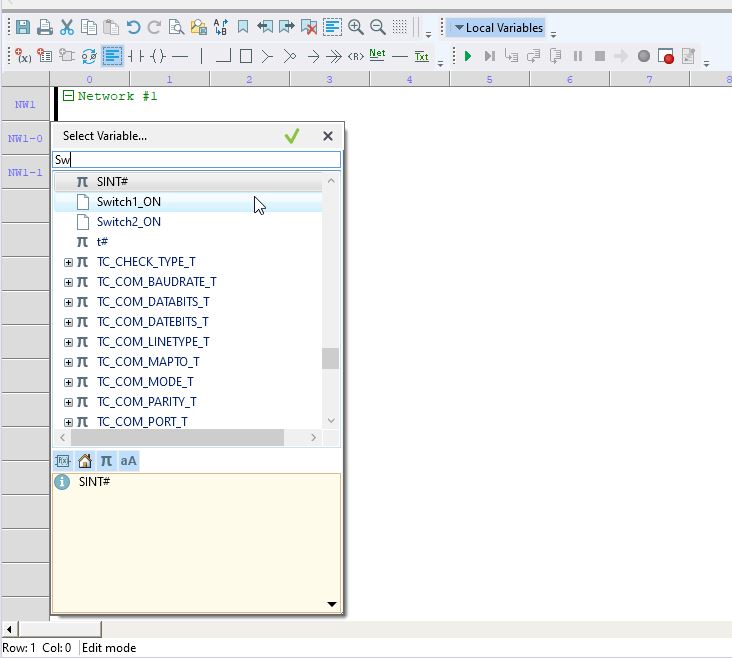
先程追加されたSwitch1_ONを選択します。
Done!
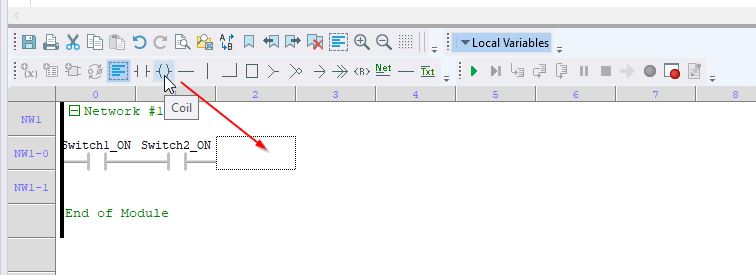
Add Coil
次はコイルを追加します。
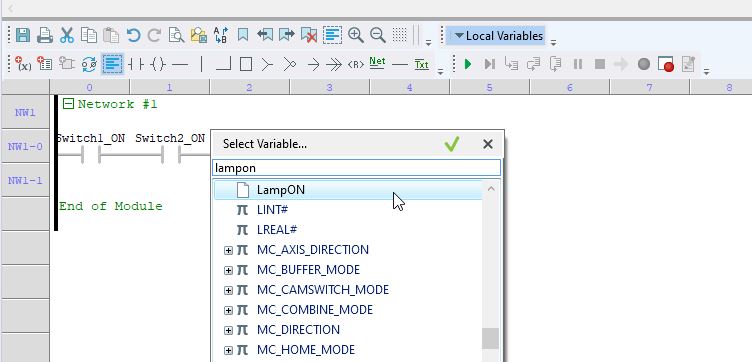
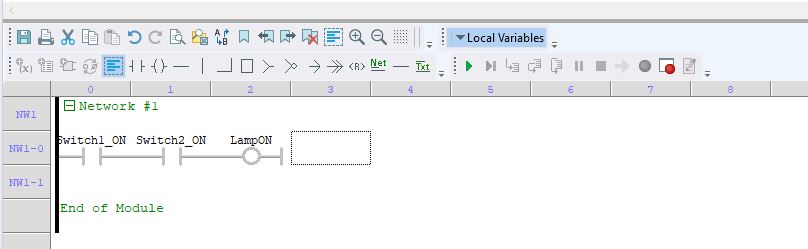
先ほど定義されたLampONを選択しましょう。
Done!
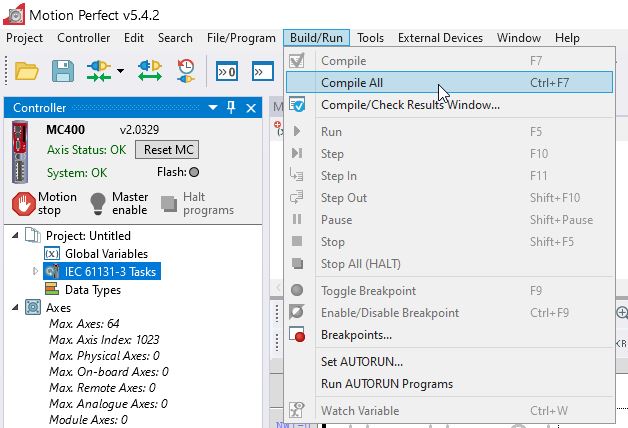
Compile All
最後はBuild/Run>Compile Allでプロジェクトをコンパイルしましょう。
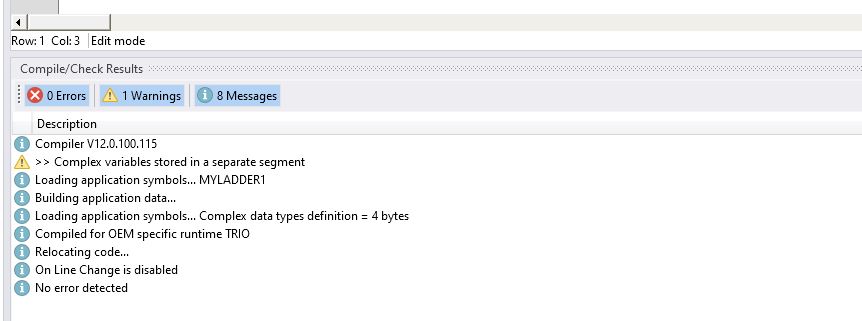
Done!プロジェクトはエラーなしです。
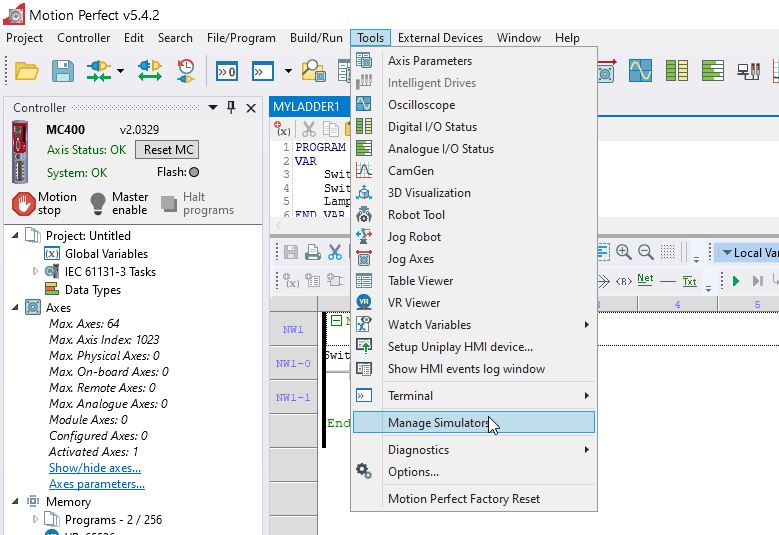
Manage Simulation
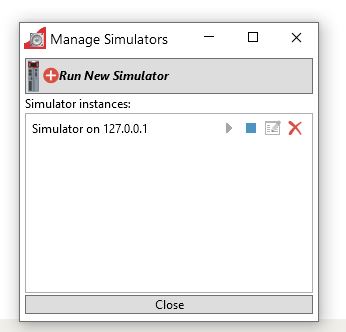
いま自分の手元に実機をもっていませんので、シミュレーターを立ち上げます。Tools>Manage Simulationをクリックします。
シミュレーターを追加しましょう。
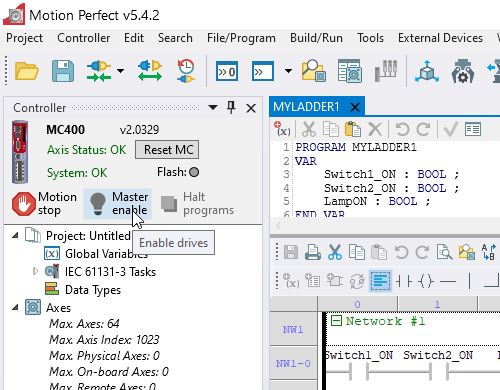
Enable Motion
Master enableをクリックしMC400を有効にしましょう。
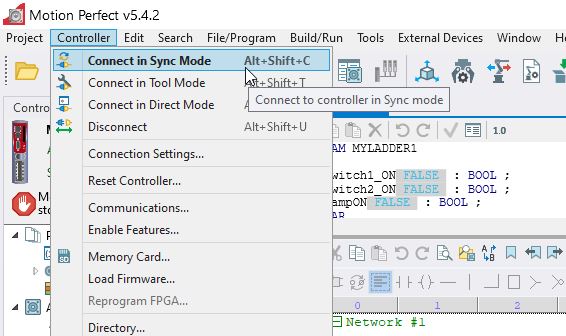
Connect in Sync Mode
プロジェクトをMC400と同期するためにController>Connect in Sync Modeで同期モードに切り替えましょう。
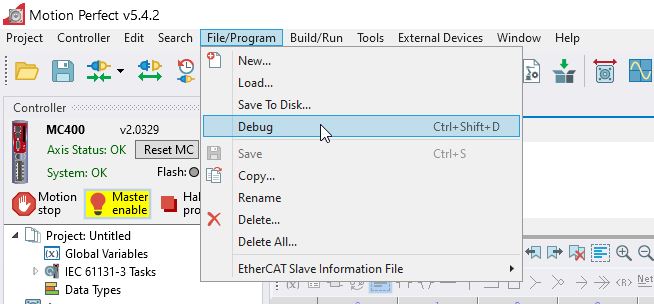
Debug
現在プログラムをMonitorするため、File/Program>Debugをクリックします。
MonitorするTaskを選びましょう。
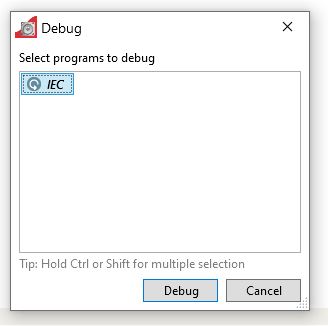
Done!
Switch ON the variables
該当する変数に現在値を変更するために、その変数をダブルクリックします。
現在値の変更画面が表示されます。
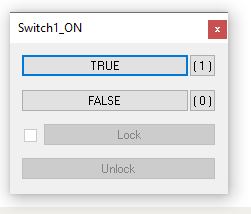
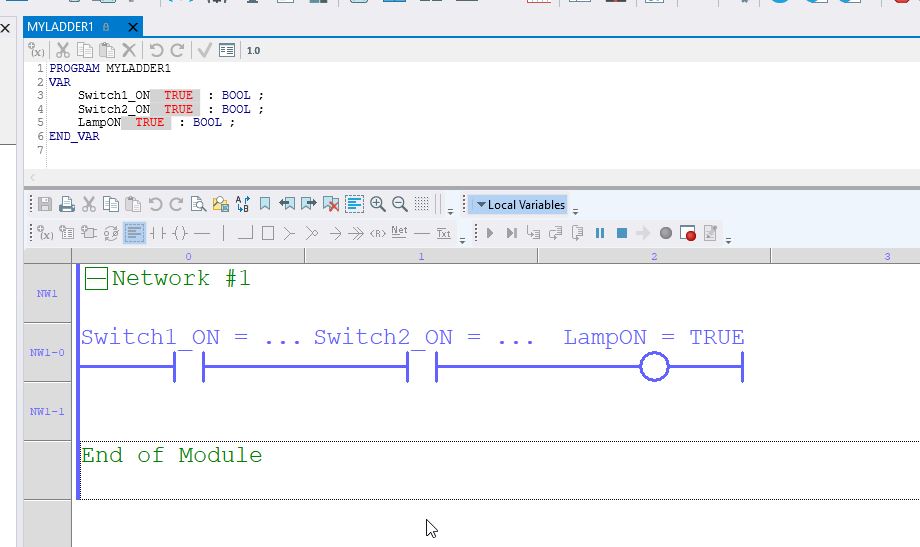
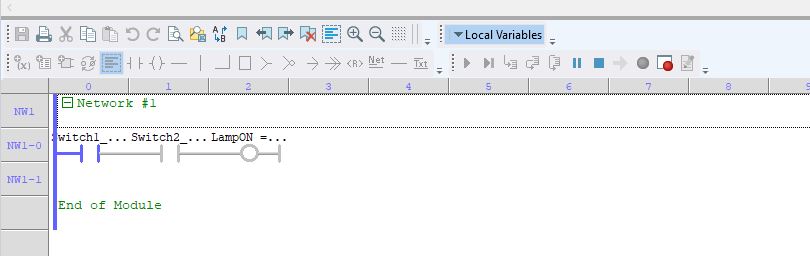
Done!Switch1_ON変数はTrueに変更しました。
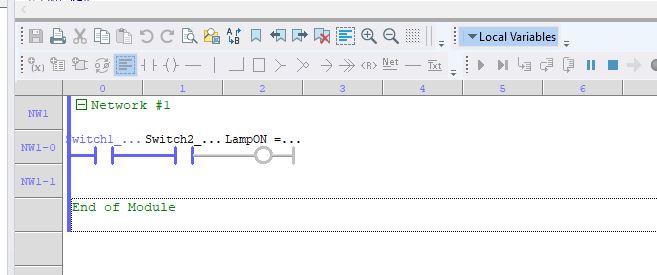
また、下図のようにSwitch1_ONとSwitch2_ONをTrueにすれば、LampONもTrueになります。