今回の記事ではBeckhoff TwinCAT3とTF6280の組わせでEthernet/IP Adapterを立ち上げ、FANUC ROBOGUIDE側でR785 OptionsでEthernet/IP Scannerと接続させます。
また、FANUC ROBOGUIDE側のIOデータMapping方法を説明します。
Step by Step、From Zero To Hero。
さ、はじめよう!
Implementation1
Beckhoff Side
まずはBeckhoff側からEthernet/IP Adapterを構築します。

Add Ethernet/IP Adapter
Ethernet/IP Adapterを追加するため、Devices>右クリック>Add New Itemします。
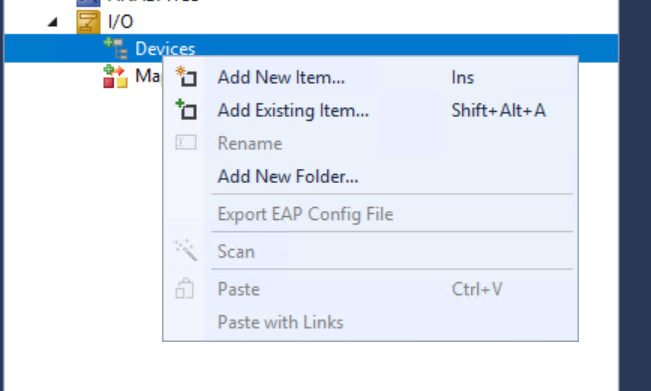
EtherNet/IP Adpater(Slave)を選び>Okします。
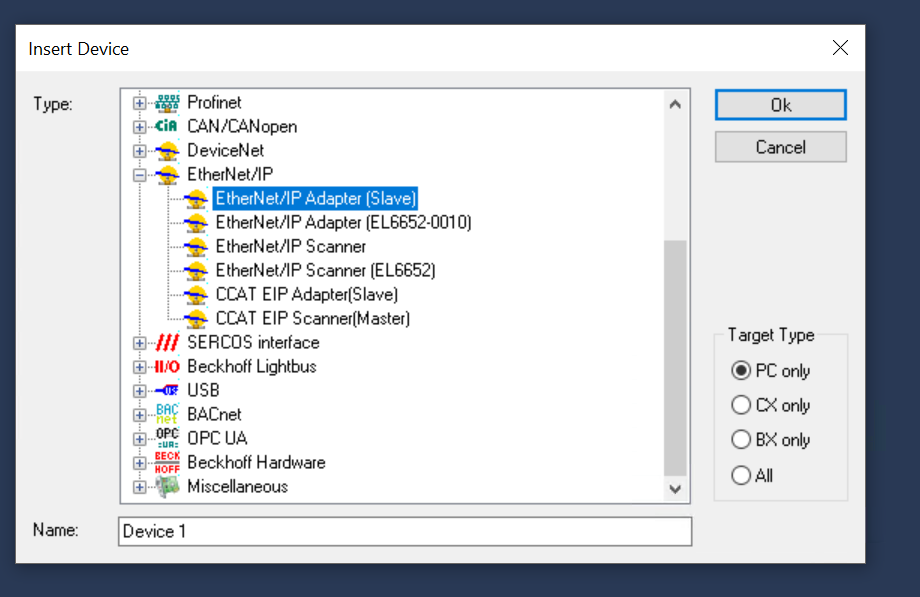
Done!
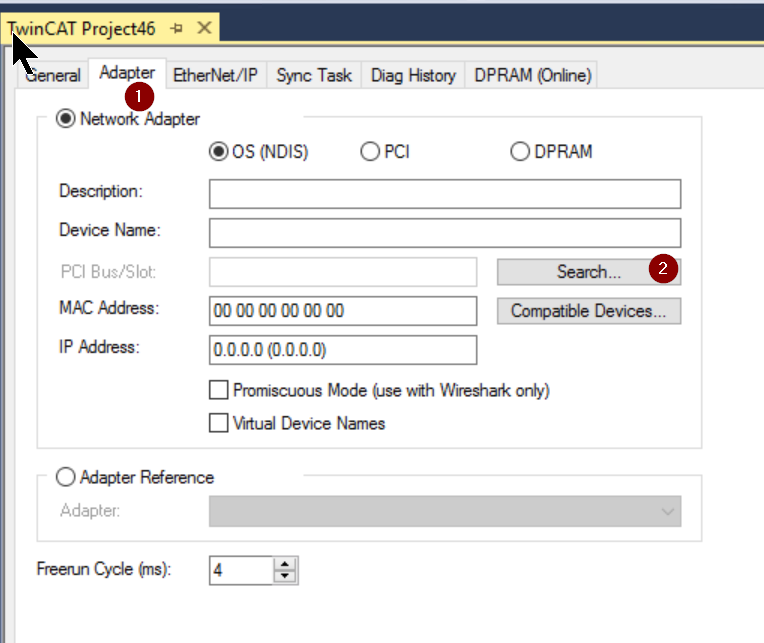
Configure Adapter
Ethernet/IP Adapterで使用するNetwork Interfaceを設定するため、Adapter Tabを開き、Searchをクリックします。
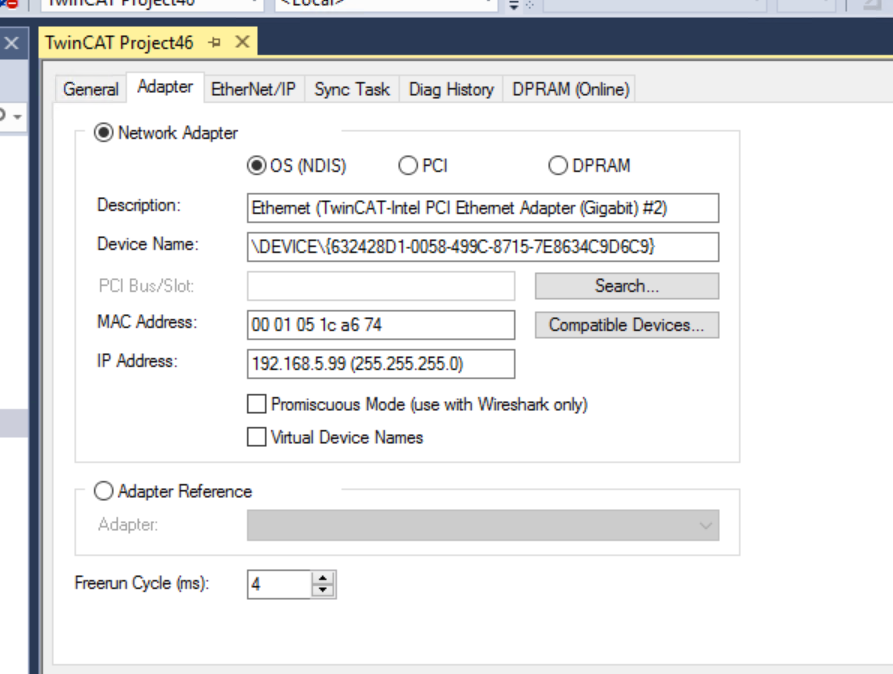
現在TwinCAT RuntimeがインストールされているPCが使用できるNetwork Interfaceが一覧でき、アプリケーションで使用するInterfaceを選び>Okで確定します。
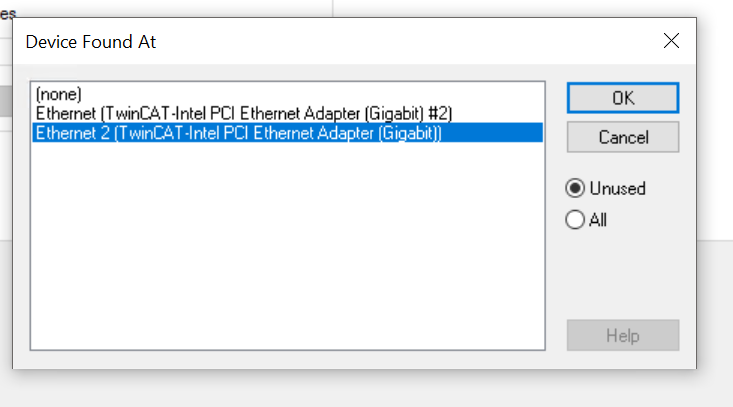
Done!
Sync Task
次はEthernet/IPのSync Taskを定義するため”Create new I/O Task”をクリックします。
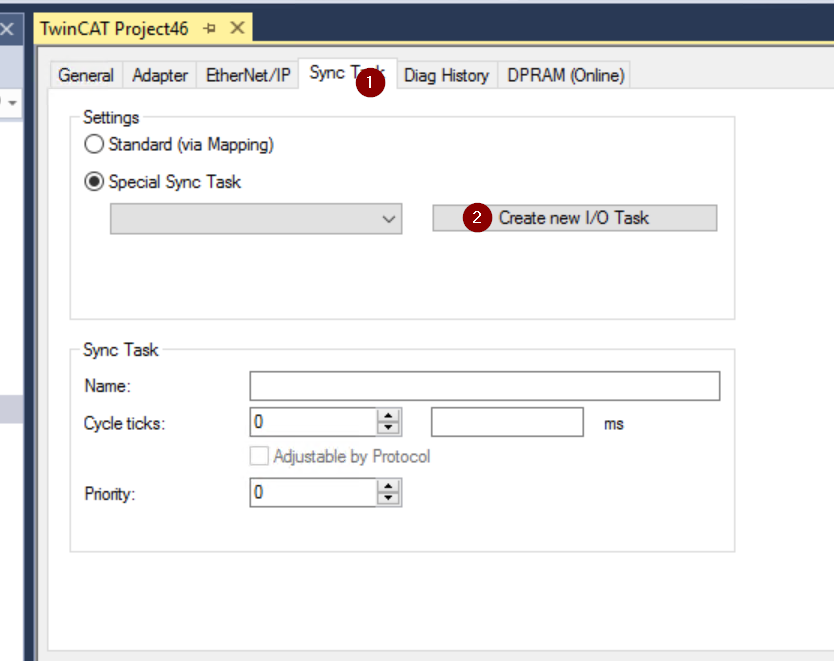
Task名を設定します。
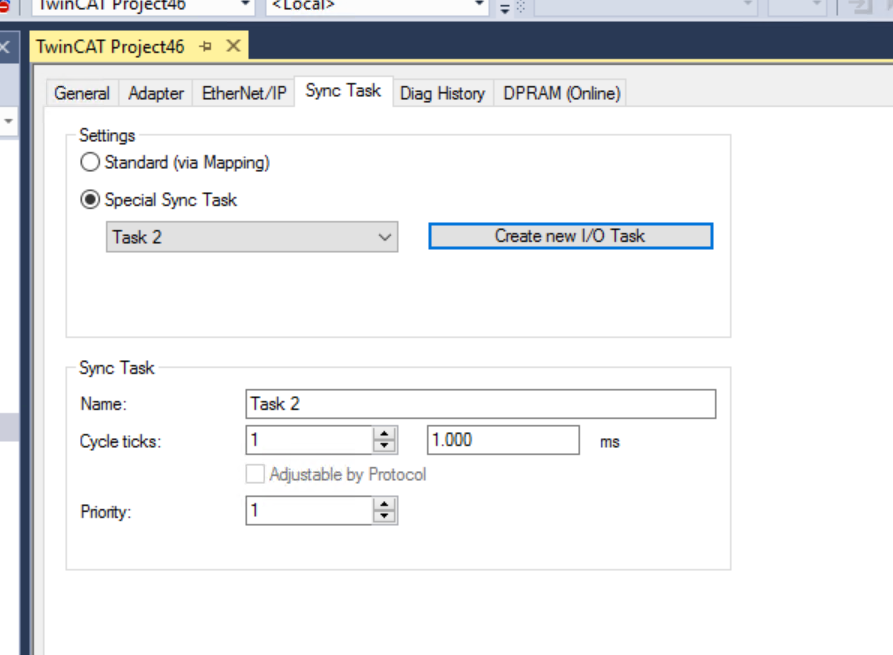
Done!あとはアプリケーションに合わせてCycle Ticksを設定しましょう。
IP Address
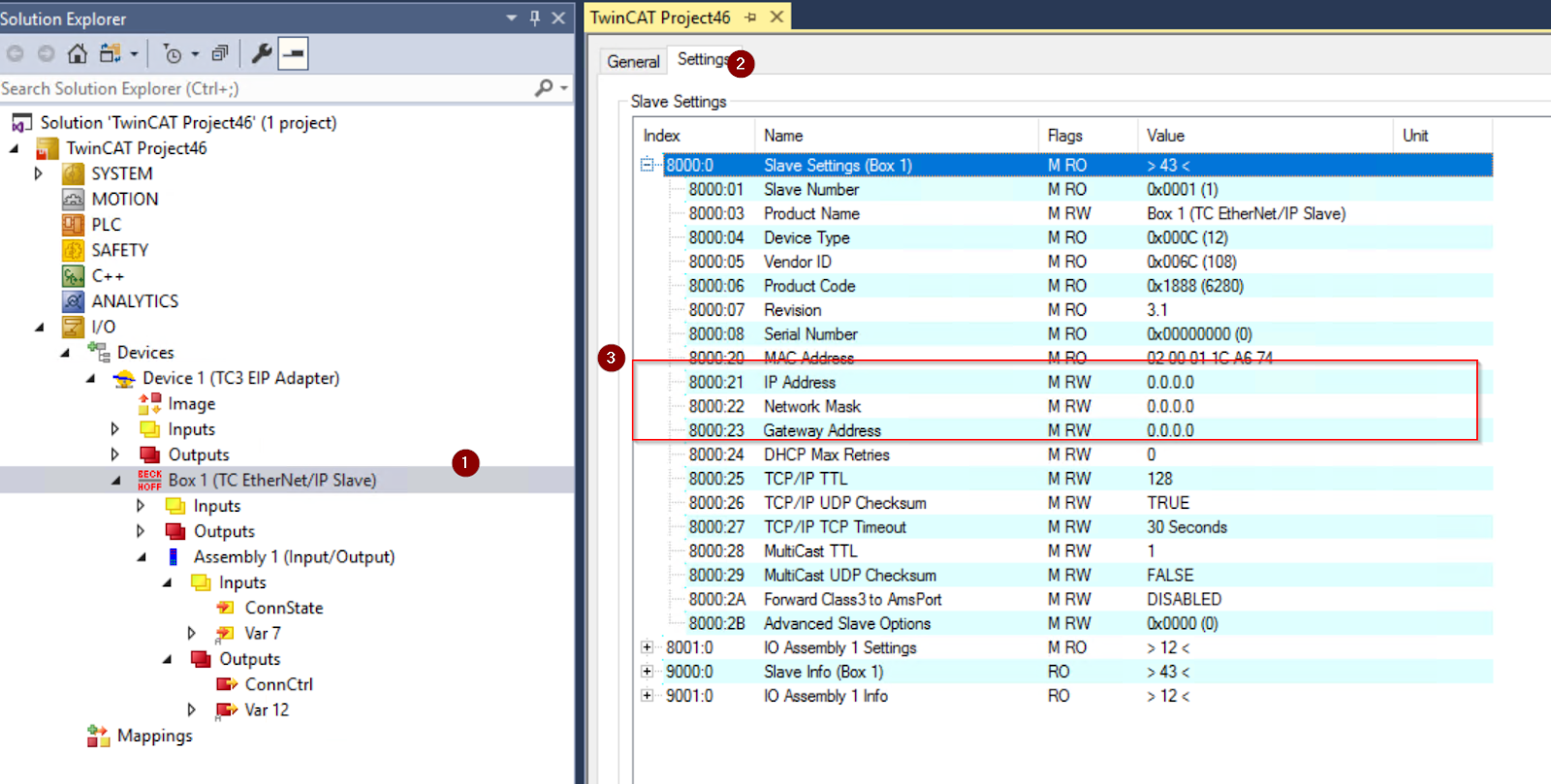
Box1>Settingsを開き、8000.21と8000.22でIPアドレうsとNetwork Maskを設定してください。注意するのはこのIPアドレスは他のデバイスのIPアドレスとかぶらないようにしましょう。
Configure the Slave
次はEthernet/IP Slaveを設定します。
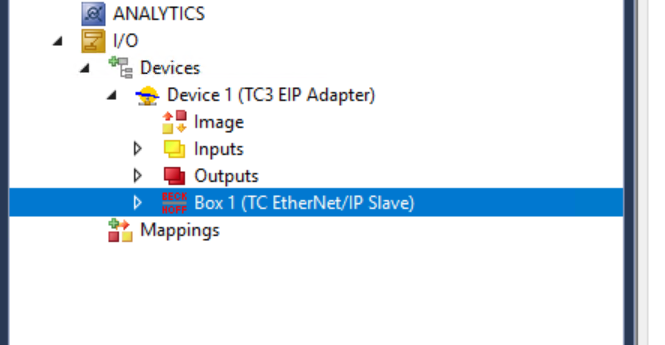
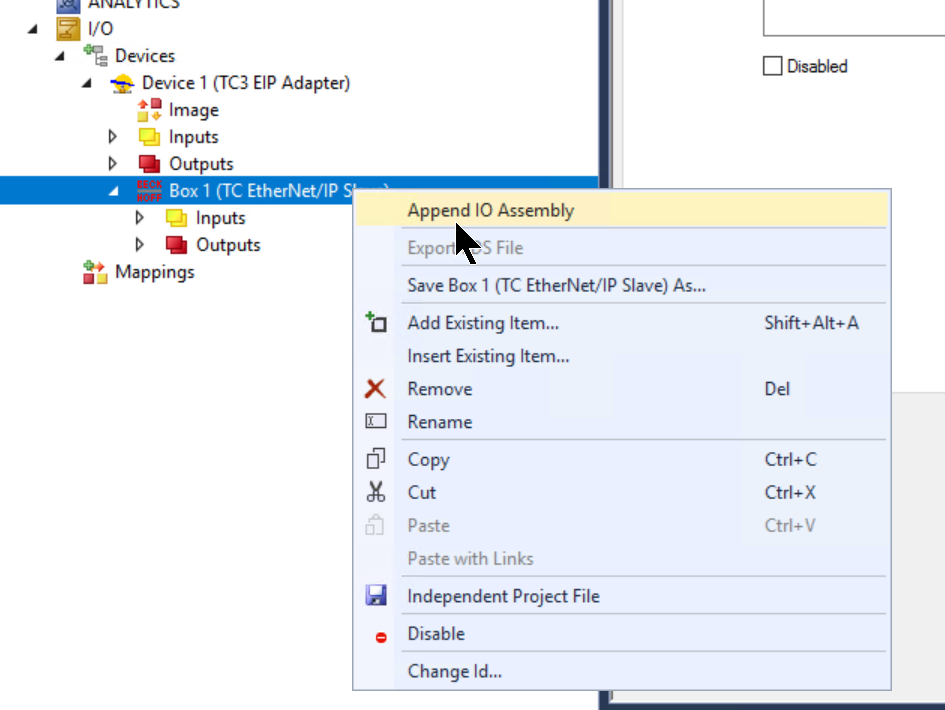
Add IO Assembly
Box1>右クリック>Append Io AssemblyをクリックしEthernet/IP AdapterのAssemblyを設定しましょう。
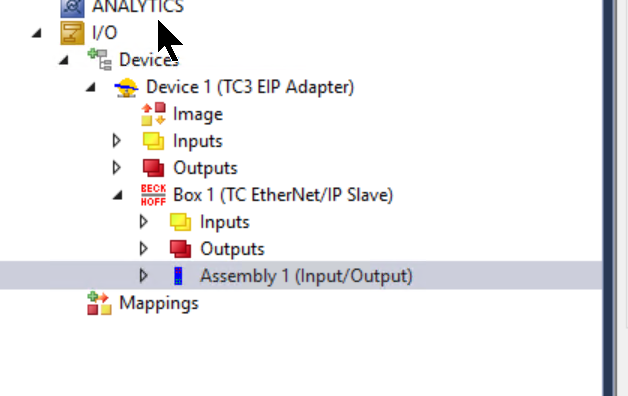
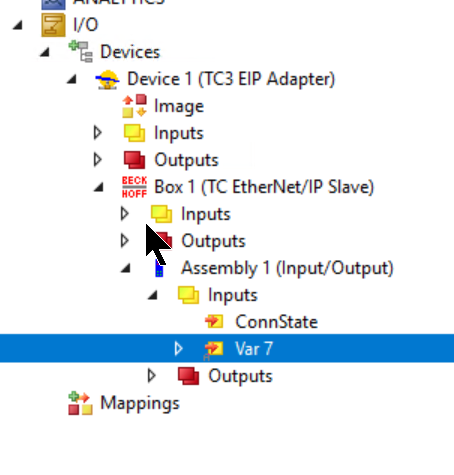
Assembly1が追加されました。
Add Inputs
Ethernet/IP Adapterの入力データ(つまりFANUC ROBOGUIDEの出力)を定義するためInputs>Add New Itemします。
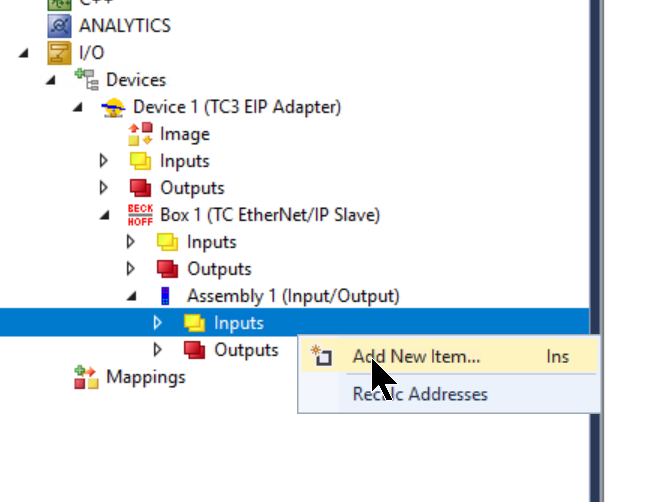
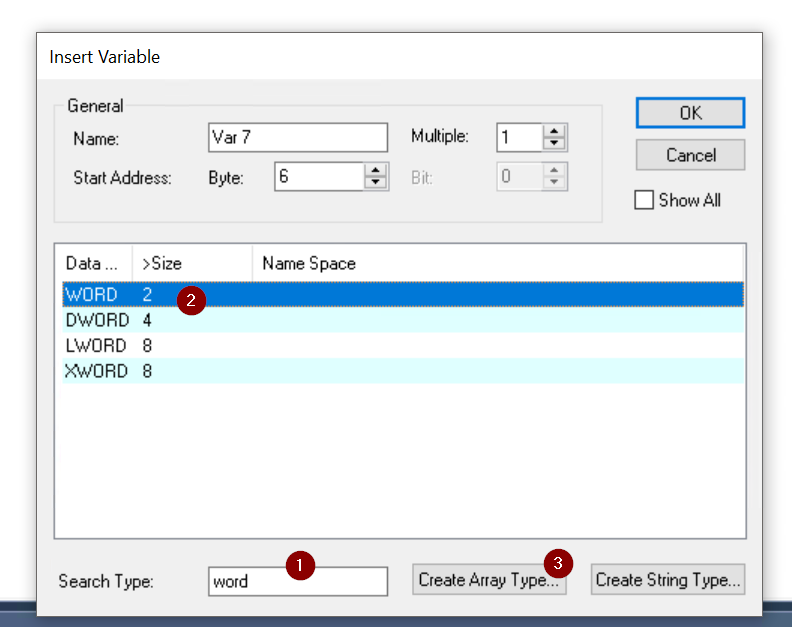
Insert Variableの画面が表示されました。
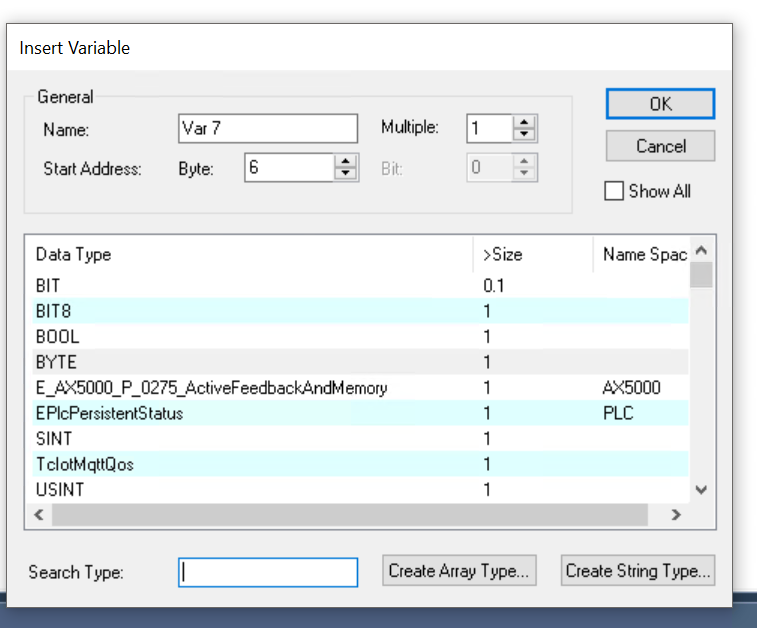
今回は4Word入力データを定義しますので、Search TypeをWordに入力し>Wordを選び>Create Array Typeをクリックし配列データ・タイプを定義します。
Arrayの作成画面に変わります。
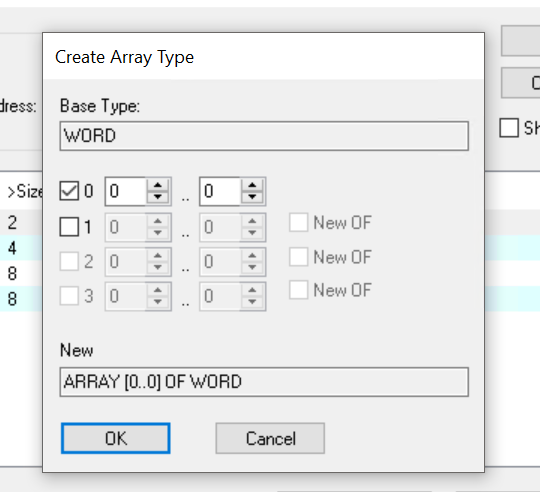
先程も書きましたが、今回の記事は4Wordデータを使用しますンド絵、配列のサイズを0…3に設定します。
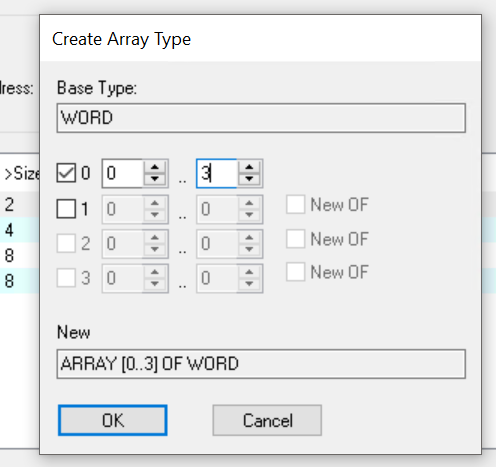
配列データ・タイプが定義されたので、ARRAY[0..3]OF WORDを選び>Okで進みます。
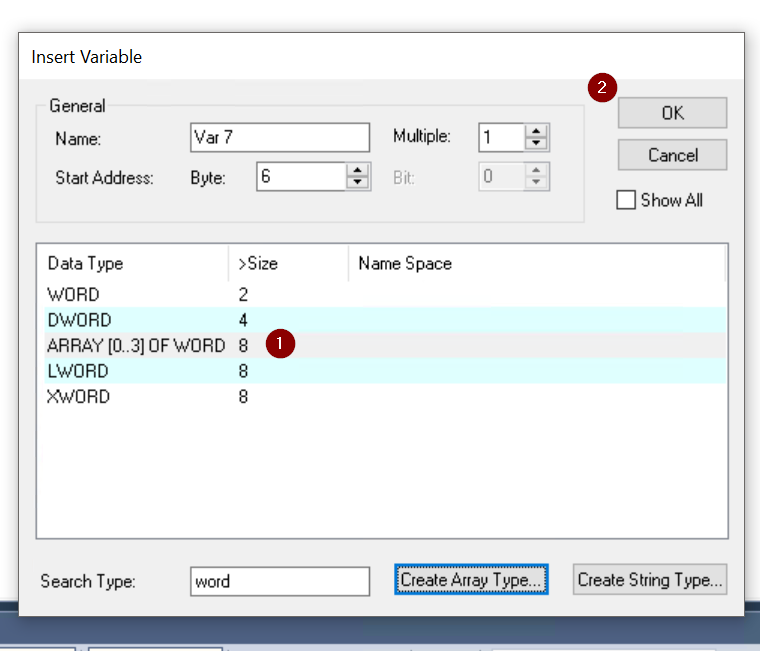
Done!
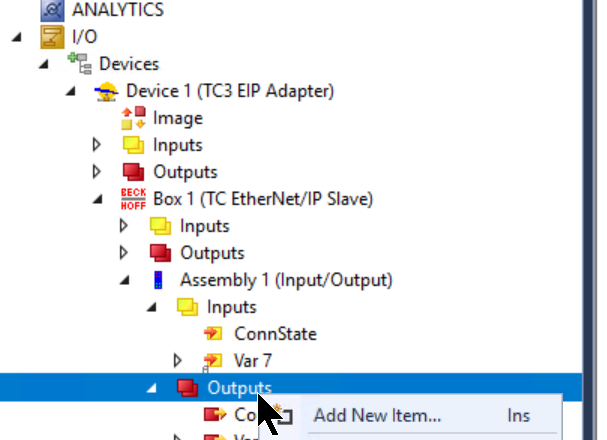
Add Outputs
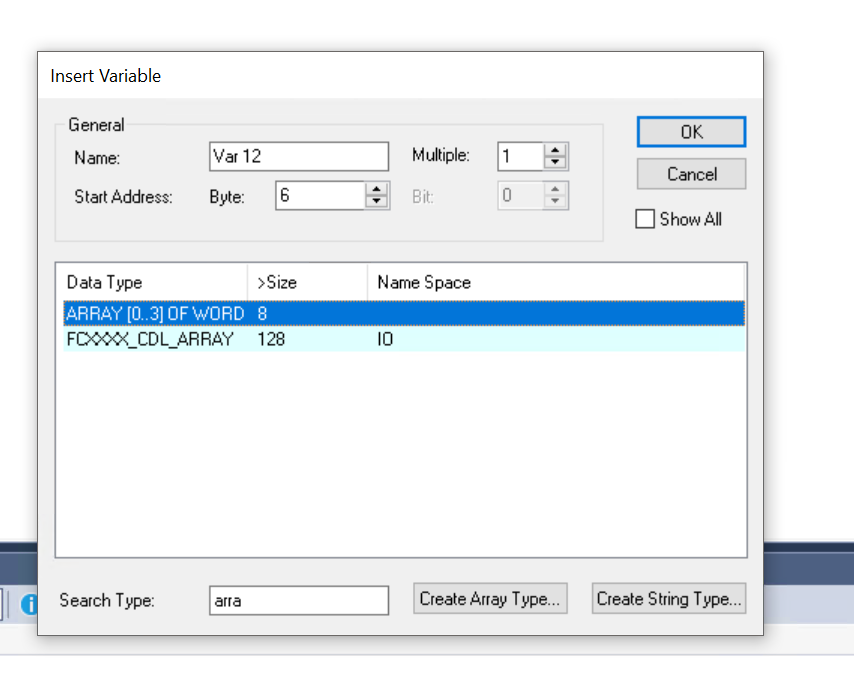
次は出力データを定義するためOutputs>右クリック>Add New Itemします。
先程追加したARRAY[0..3]OF WORDを選び>Okします。
Add PLC Project
次はPLCプロジェクトを追加するため、PLC>右クリック>Add New itemします。
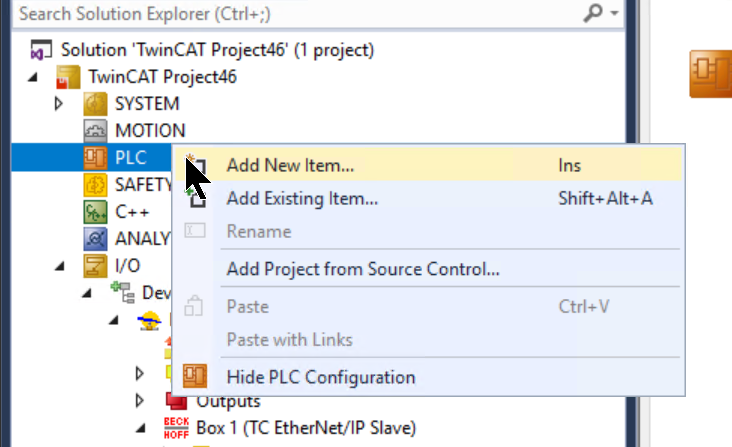
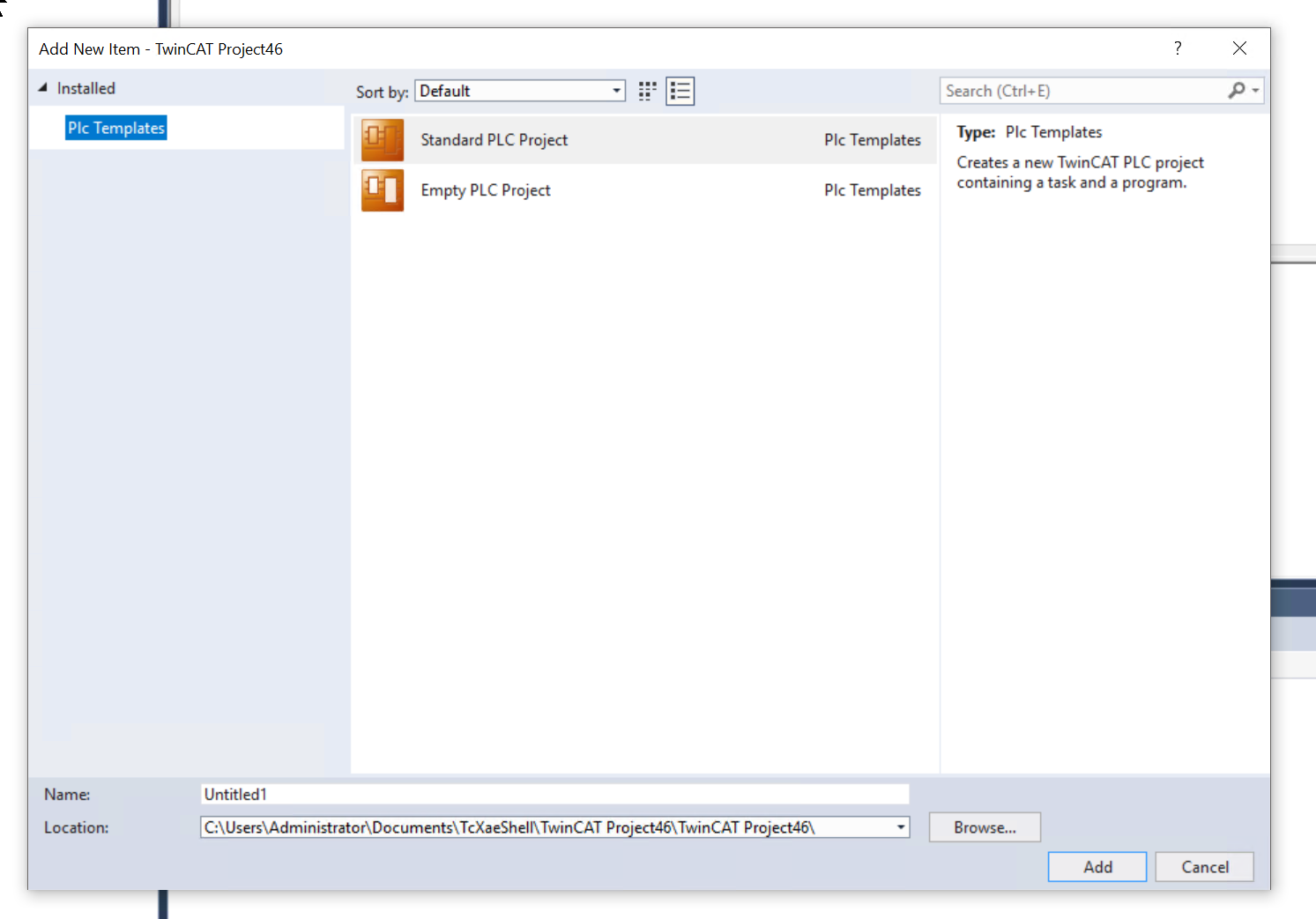
Standard PLC Projectを選び>Addします。
MAIN Program
今回の記事ではMAINプログラムにProcess データのみを定義し、次回からは簡単なロボットプログラムと連携できるようにします。
| PROGRAM MAIN VAR inWord AT %I*:ARRAY[0..3]OF WORD; outWorrd AT %Q*:ARRAY[0..3]OF WORD; in,out:ARRAY[0..3]OF WORD; END_VAR in:=inWord; outWorrd:=out; |
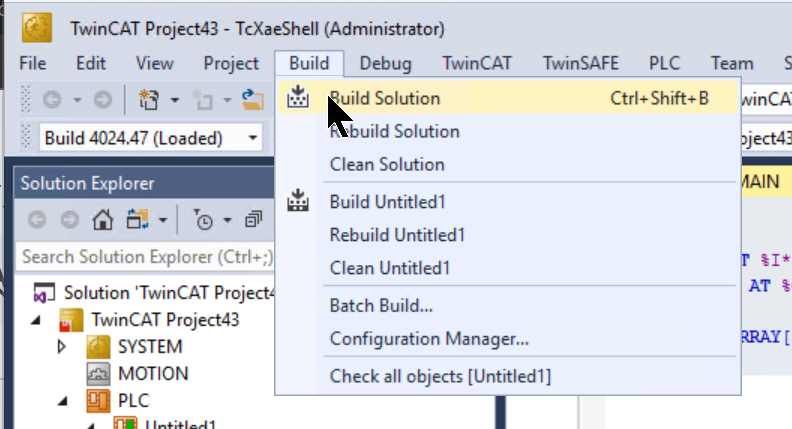
Build
Build>Build Solutionでプロジェクトをコンパイルかけます。
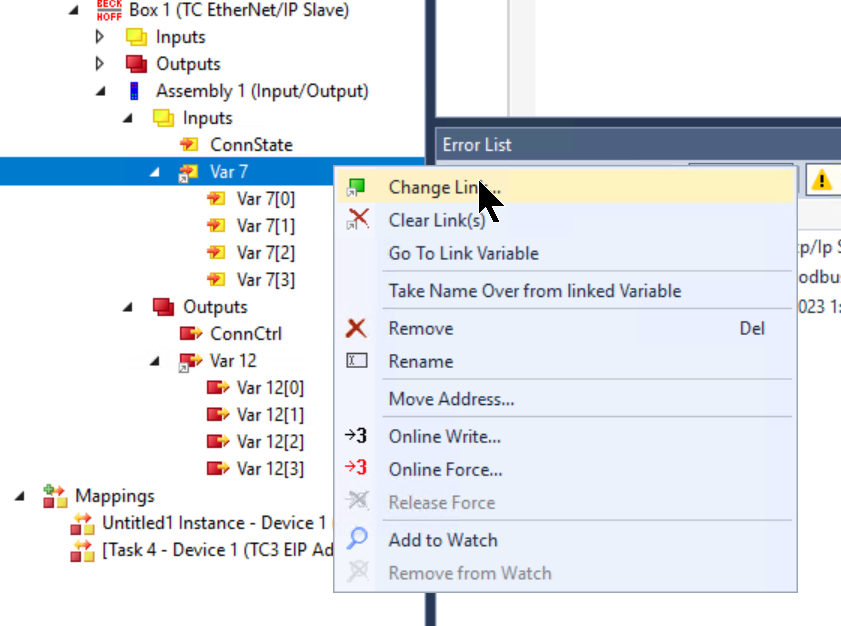
Link IOs
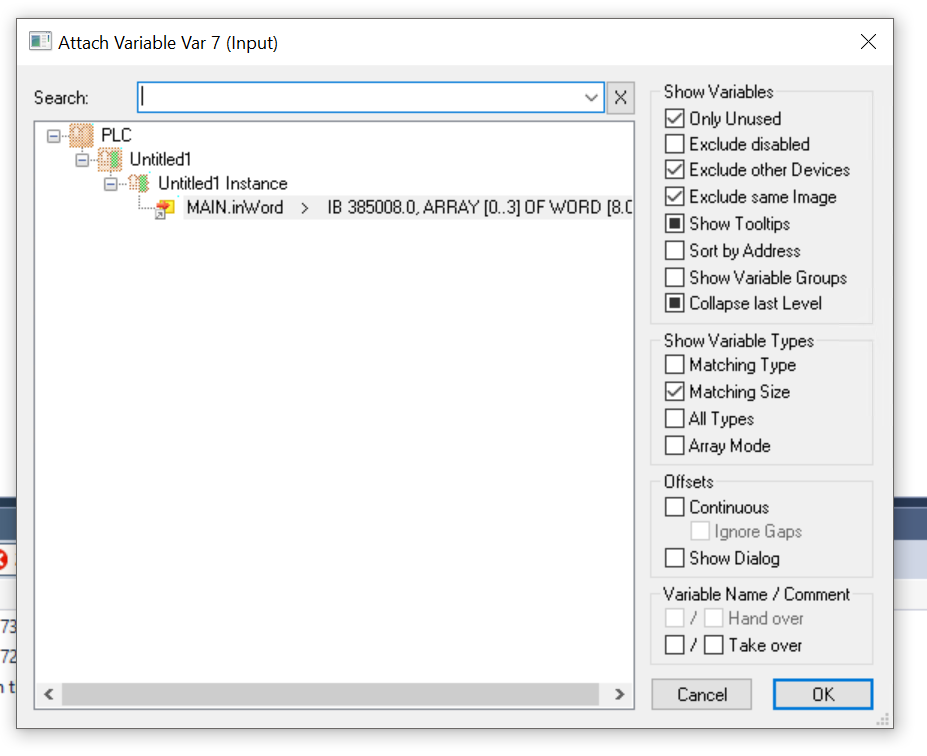
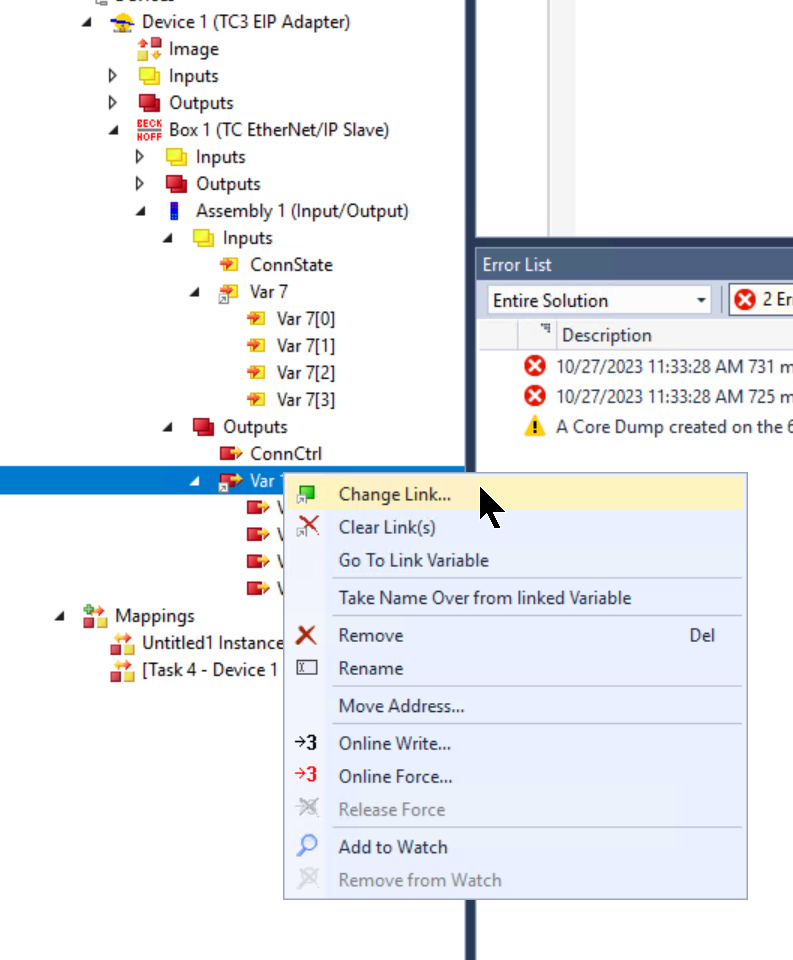
今度はUser Programにある変数とProcess IOを紐つけるため、Inputs>変数>右クリック>Change Linkします。
先程MAINプログラムで定義した変数を設定しましょう。
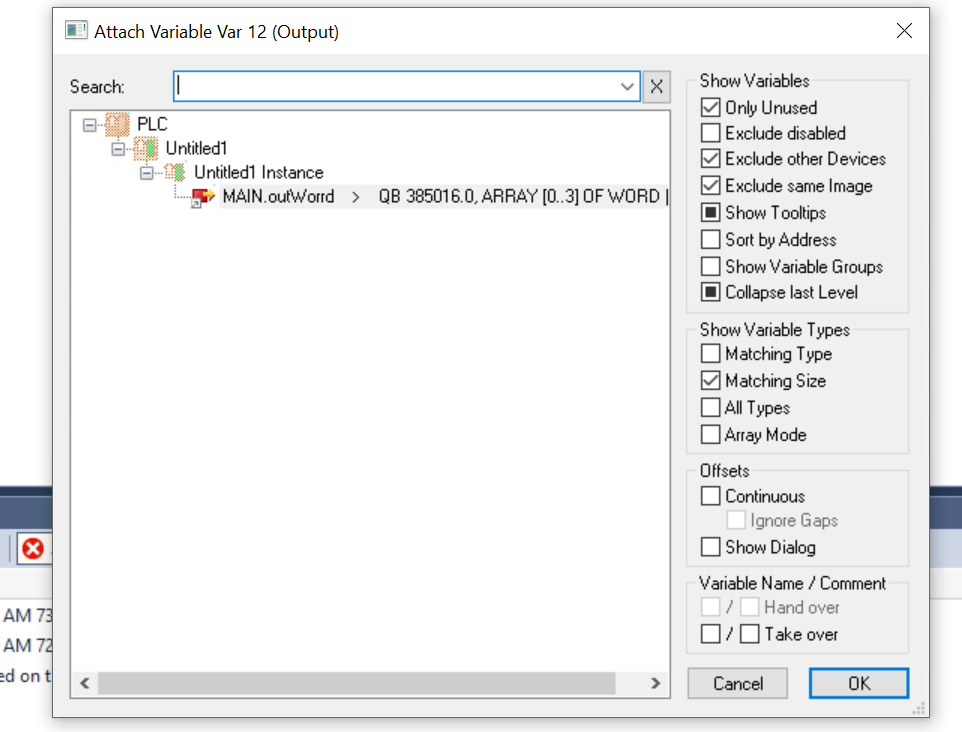
出力データも同じ操作でUser Programにある変数を紐つけましょう。
User Programに定義した変数に設定しましょう。
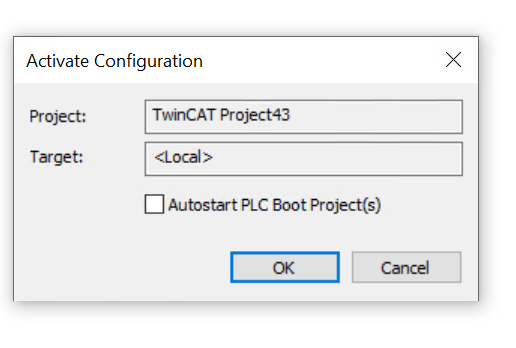
Activate Configuration
最後はActivate ConfigurationでHardware ConfigurationをRuntimeにDownloadしましょう。
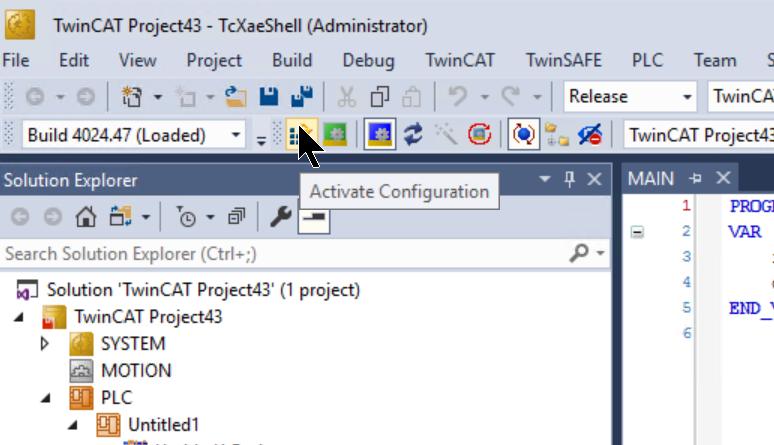
Okで進みます。
もしライセンスが足りない場合、Yesで進みます。
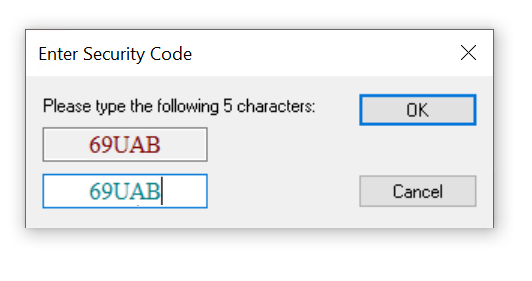
Security Code表示された文字と同じものを入力すれば自動的にTrialライセンスが生成できます。
OkでTwinCATをRun Modeに切り替えましょう。
Login
LoginボタンをクリックしプログラムをDonwloadします。
Yesで進みます。
Run
最後はRunボタンをクリックしプログラムをStartします。
それでBeckhoff側が設定Okです。
FANUC Side
次はFANUC側の設定を行います。
New Project
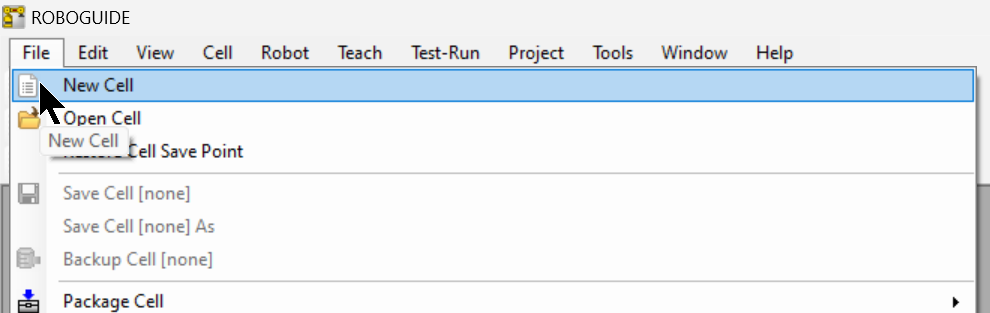
ROBOGUIDEで新規プログラムを作成するためFile>New Cellをクリックします。
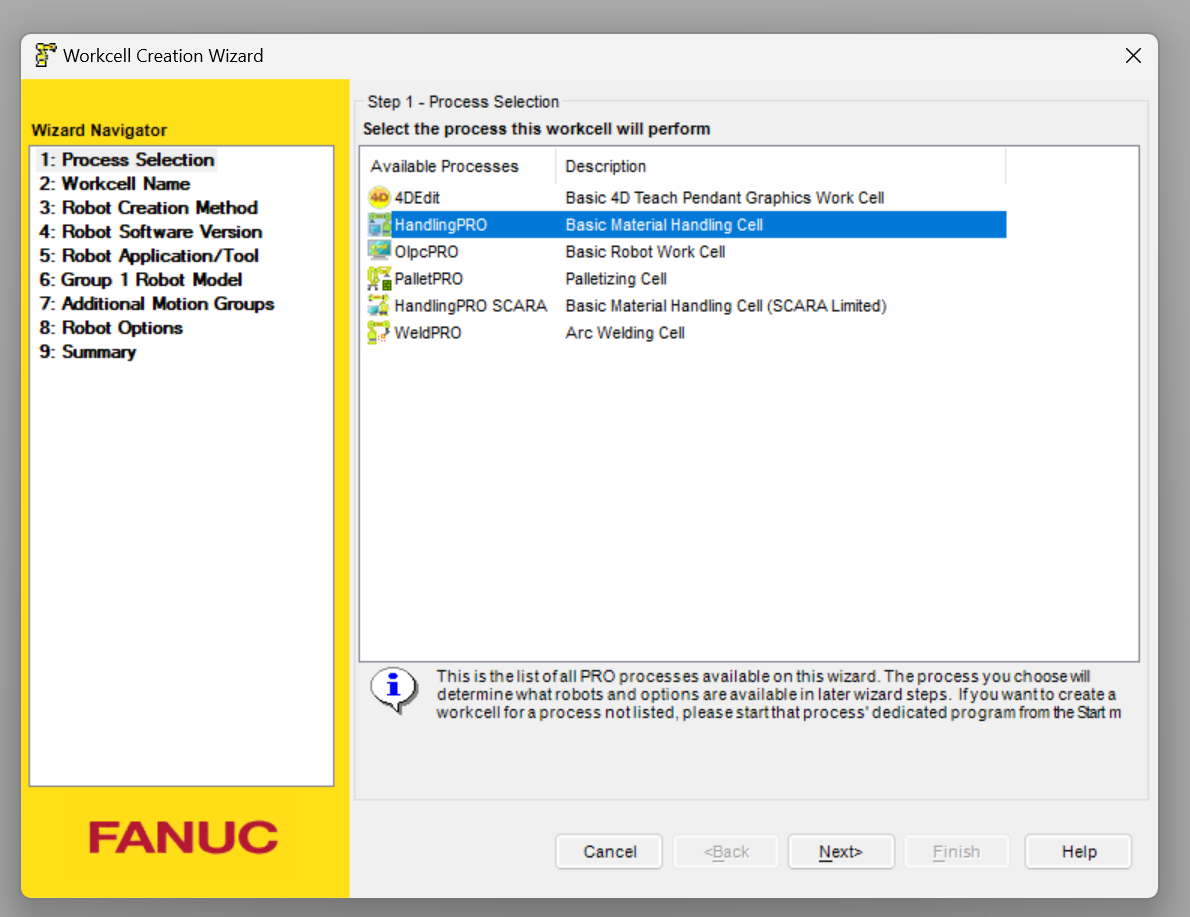
Process Selection画面にアプリケーションを合わせて設定します。
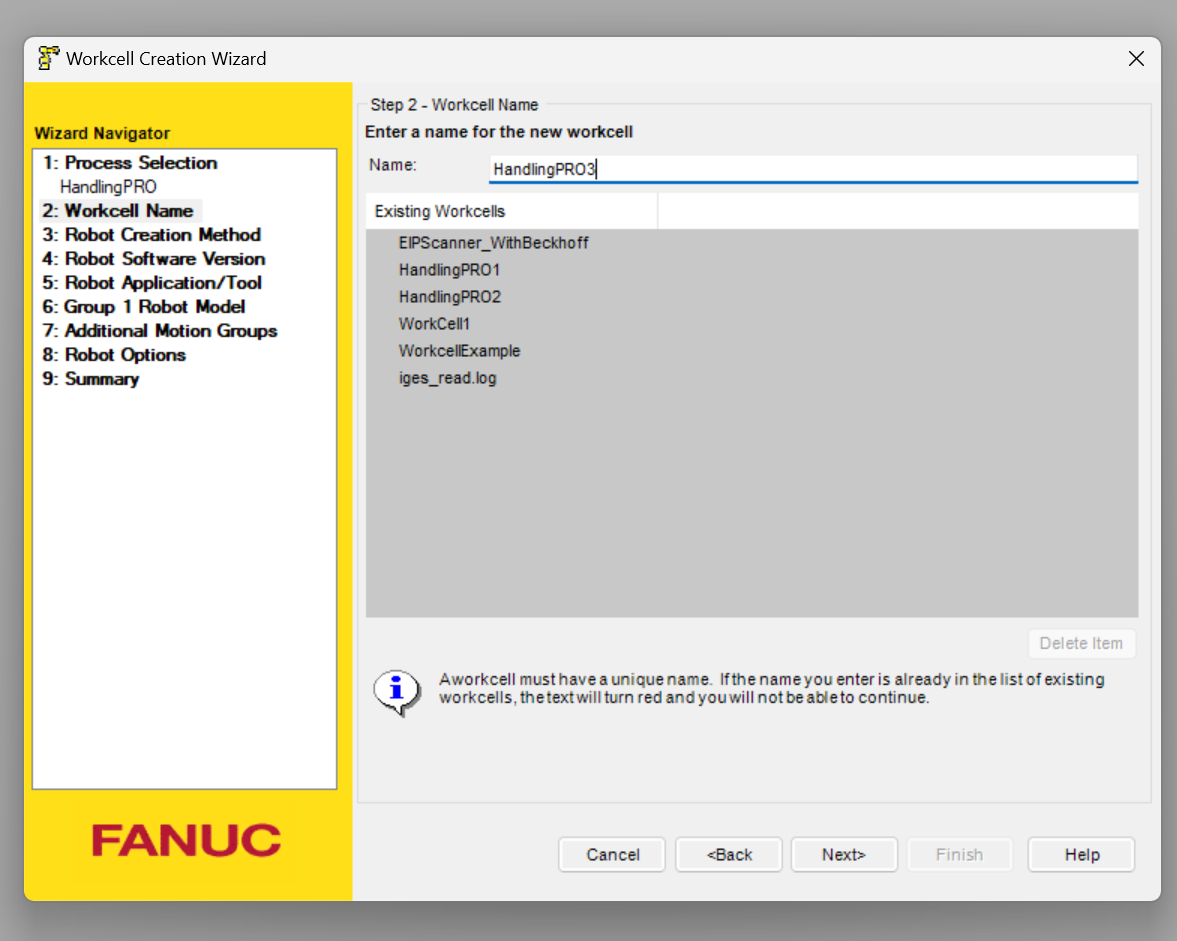
Workcell 名を設定しNext>進みます。
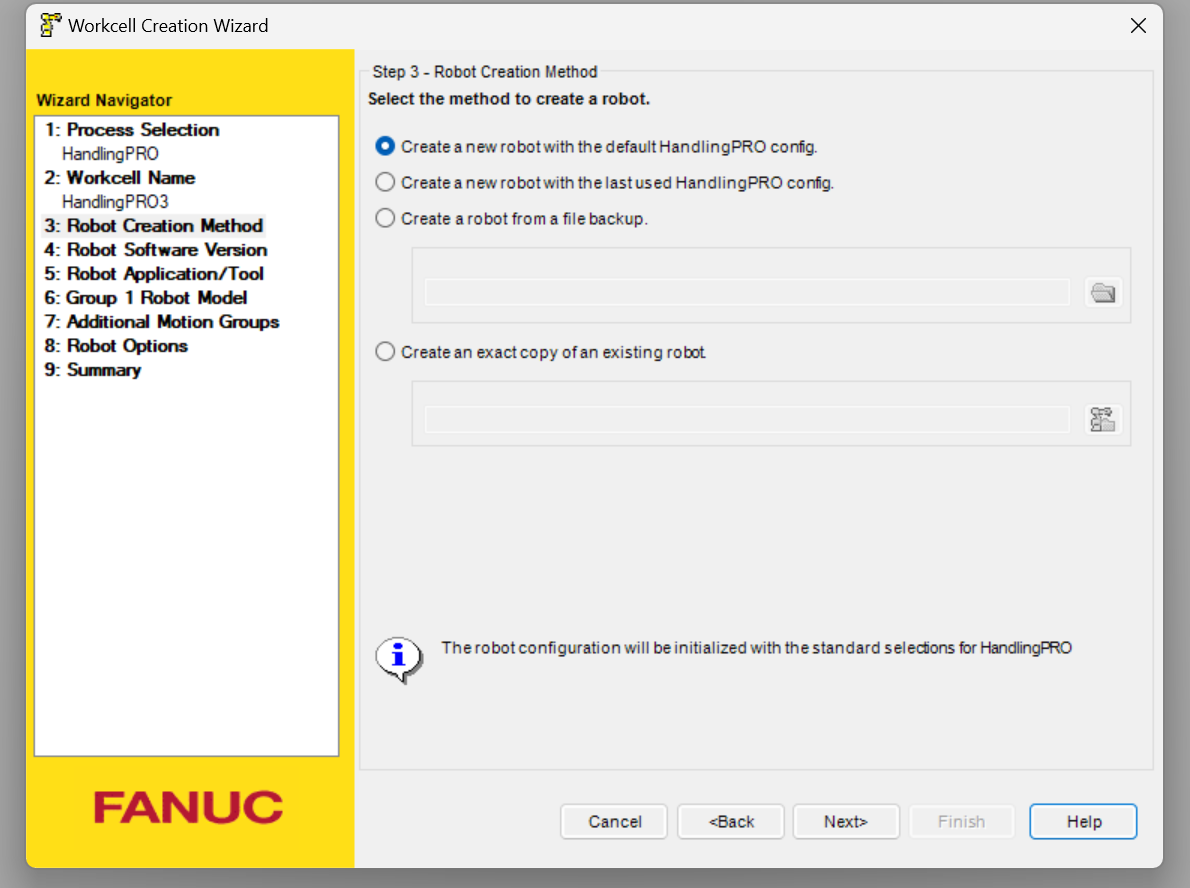
新規ロボットConfigurationを作成します。
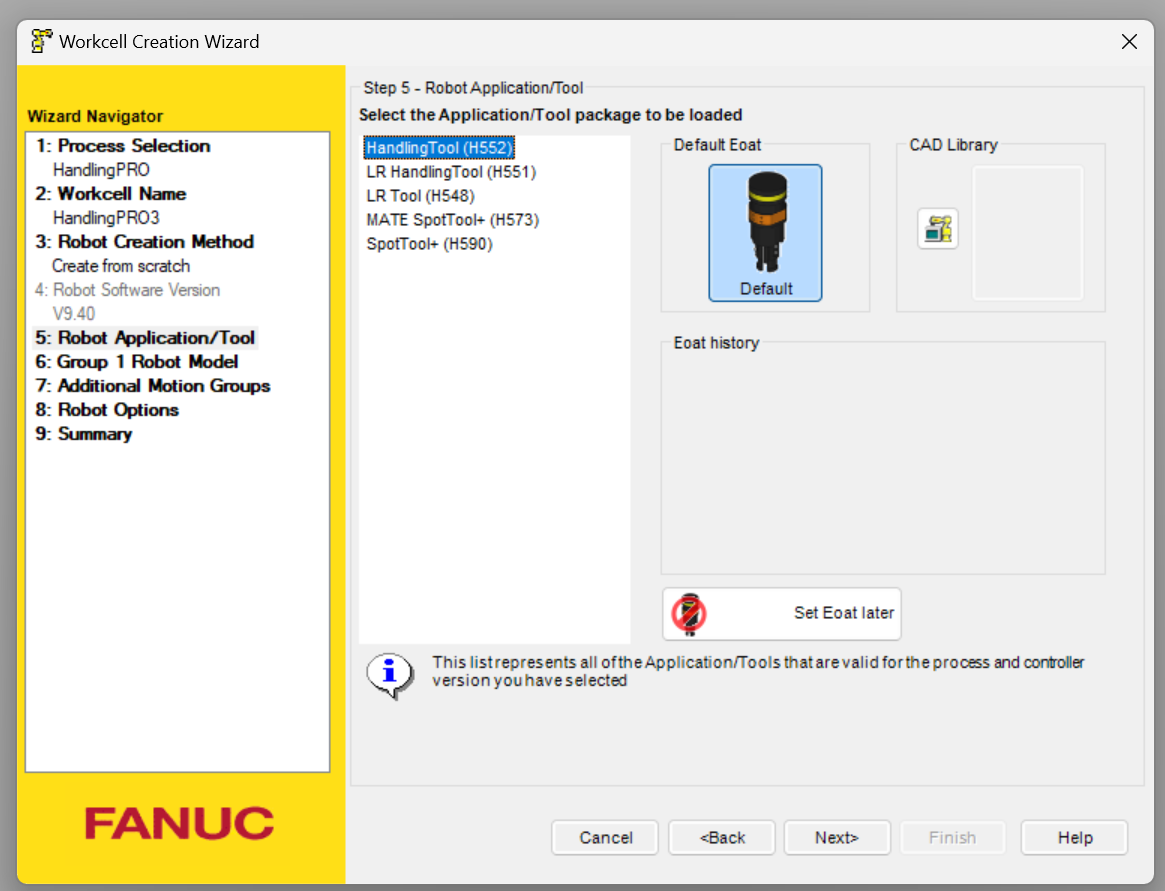
ツールもアプリケーションに合わせて設定しましょう。
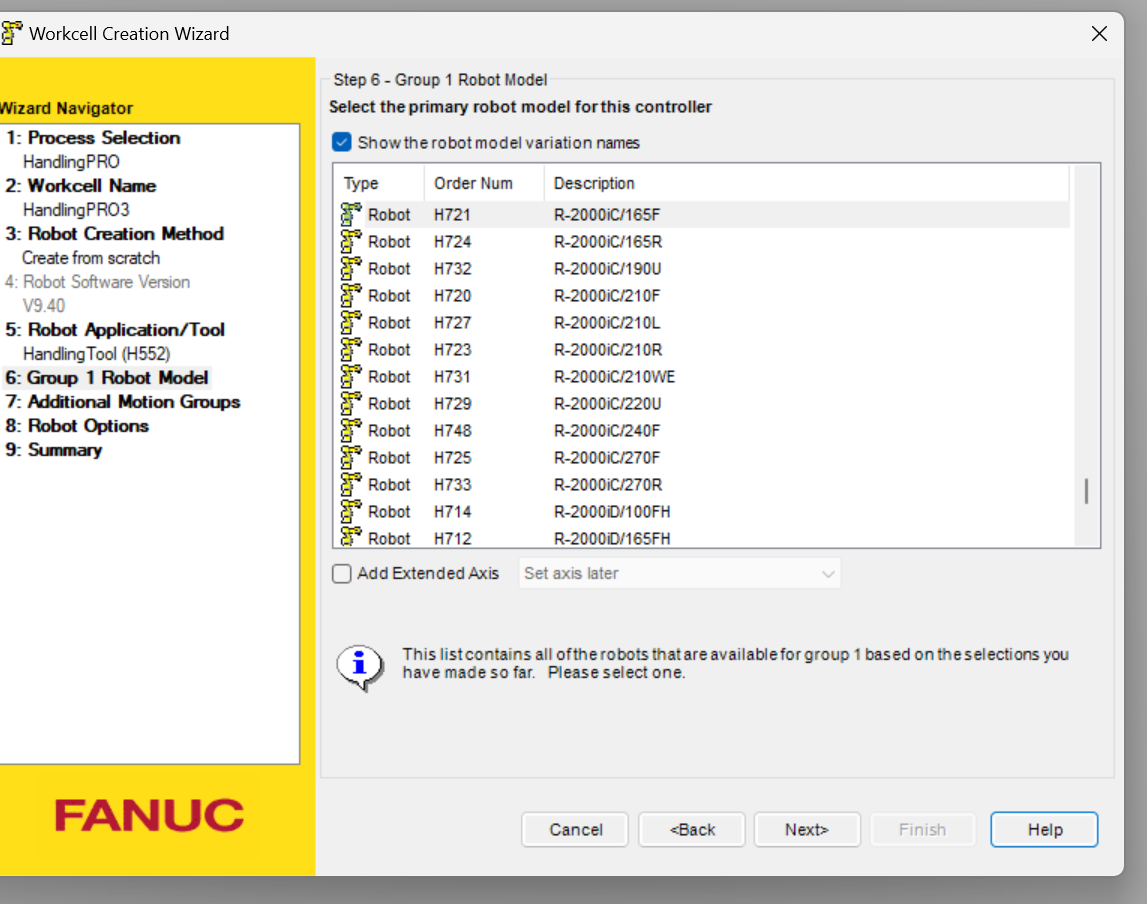
次はアプリケーションで使用するロボットを設定します。
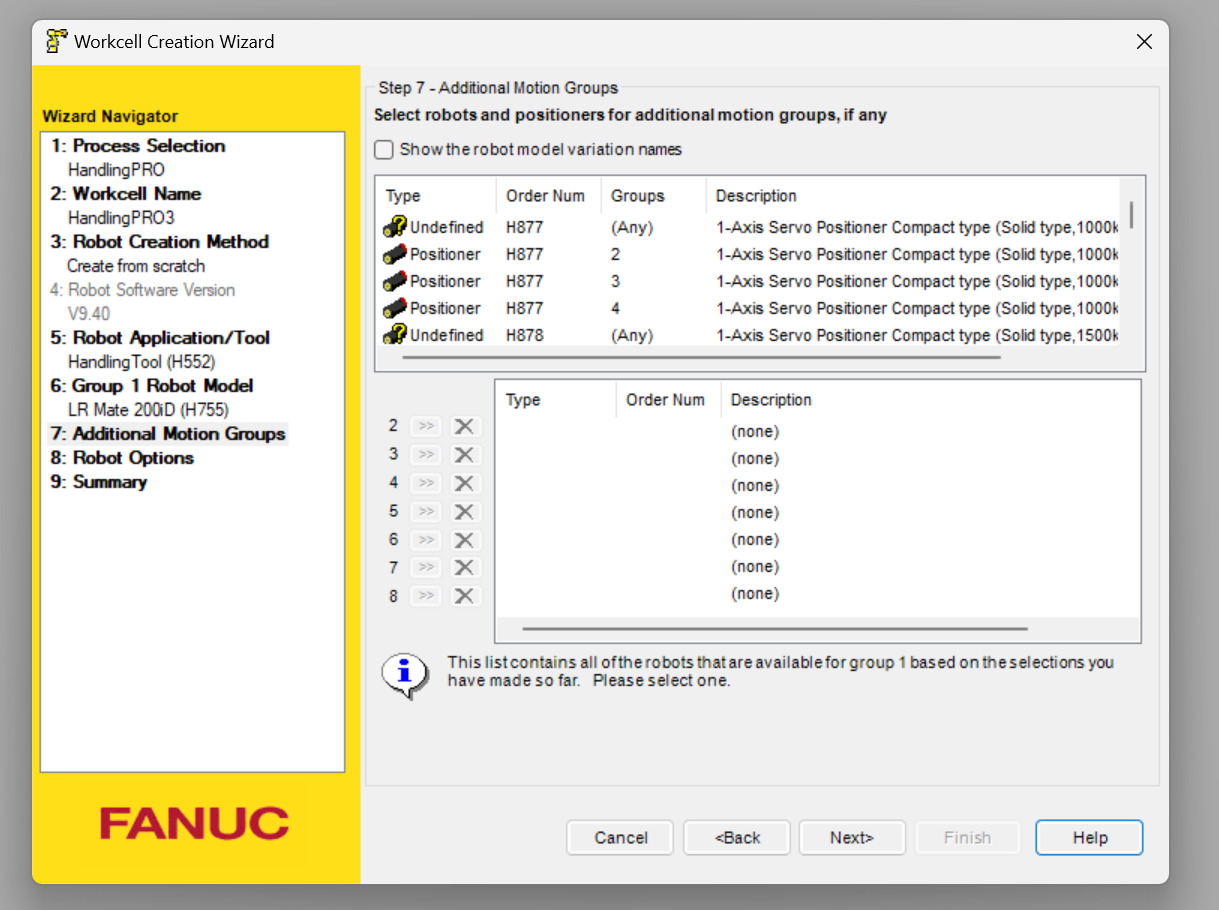
外部軸がある場合に設定してください。
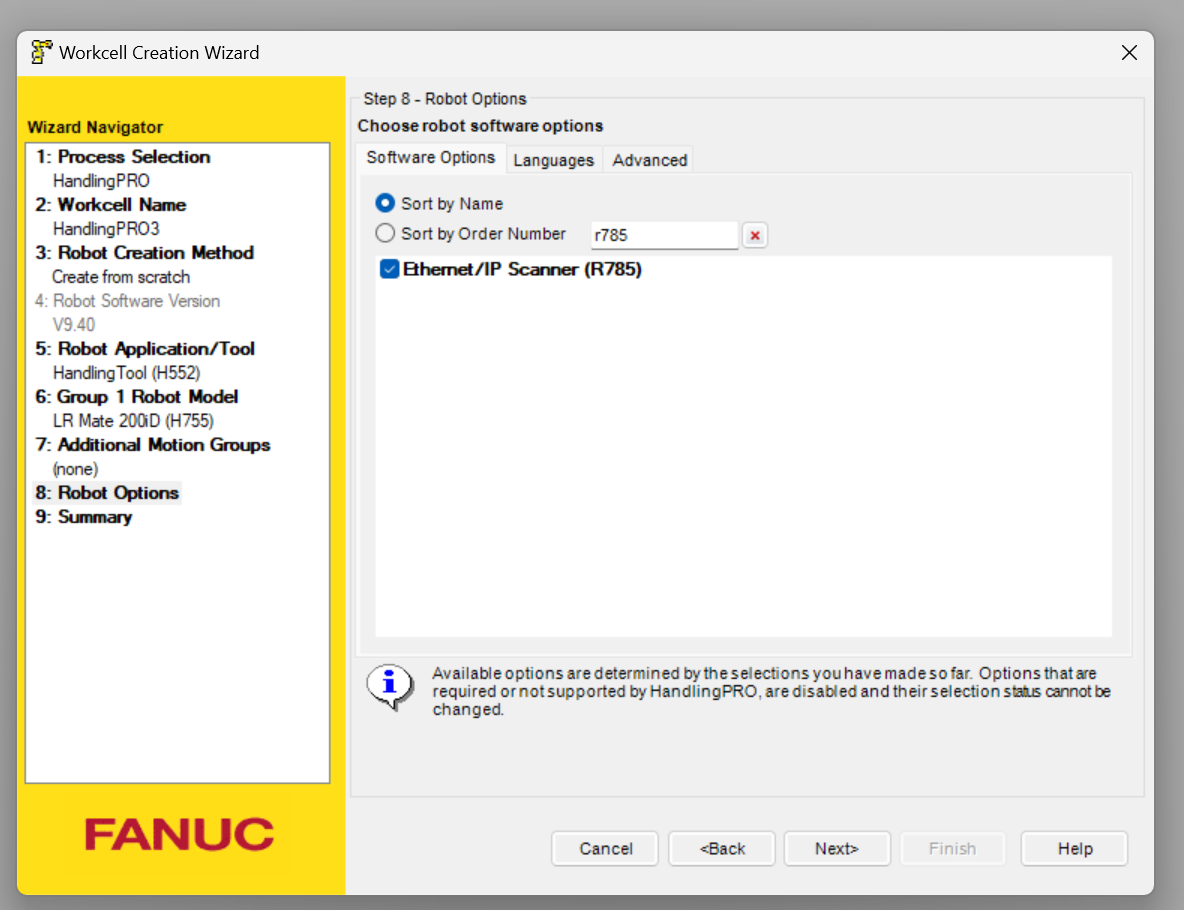
次はロボットのOptions設定になります。
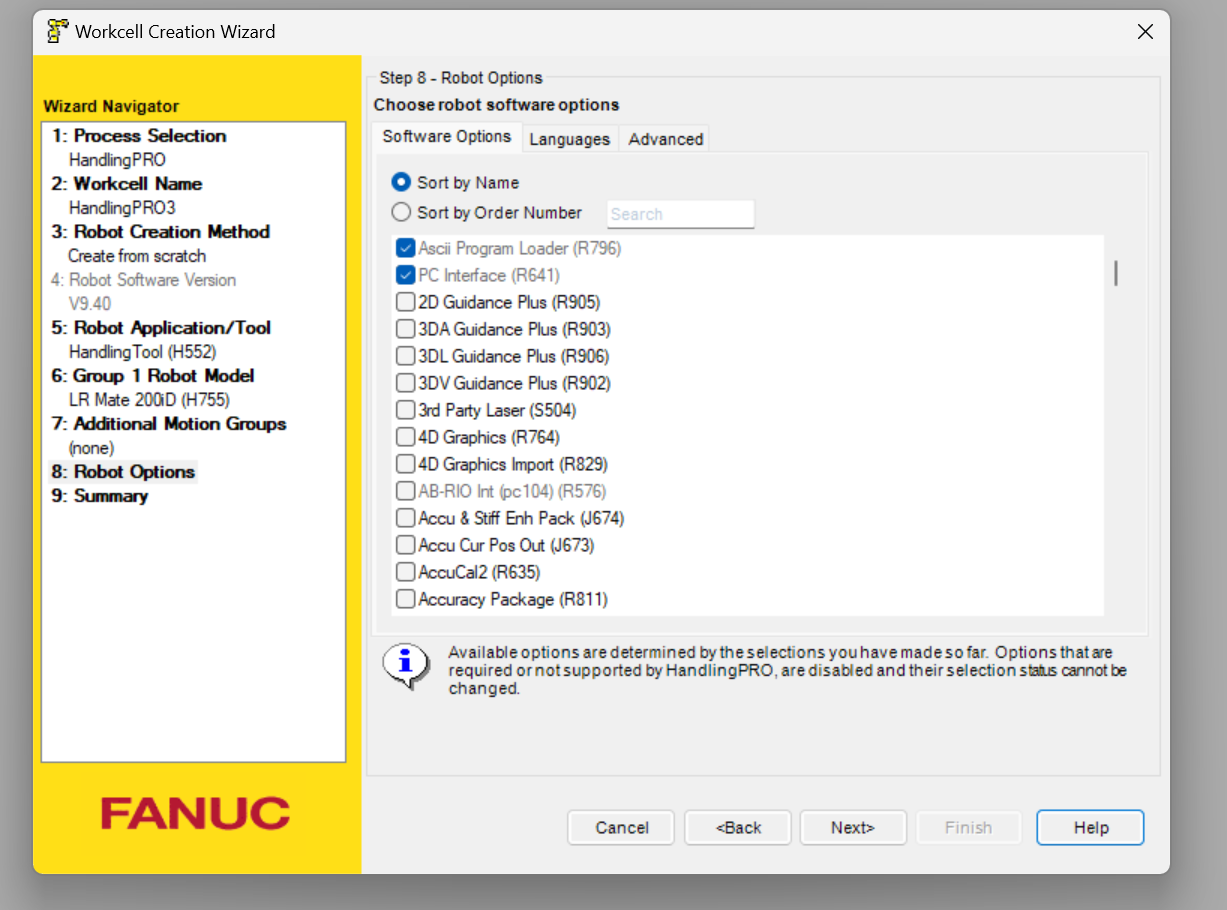
今回記事でr785を使用しますので、r785を検索しCheck入れてください。
最後はConfigurationを確認し、Finishedで新規Workcellを生成しましょう。
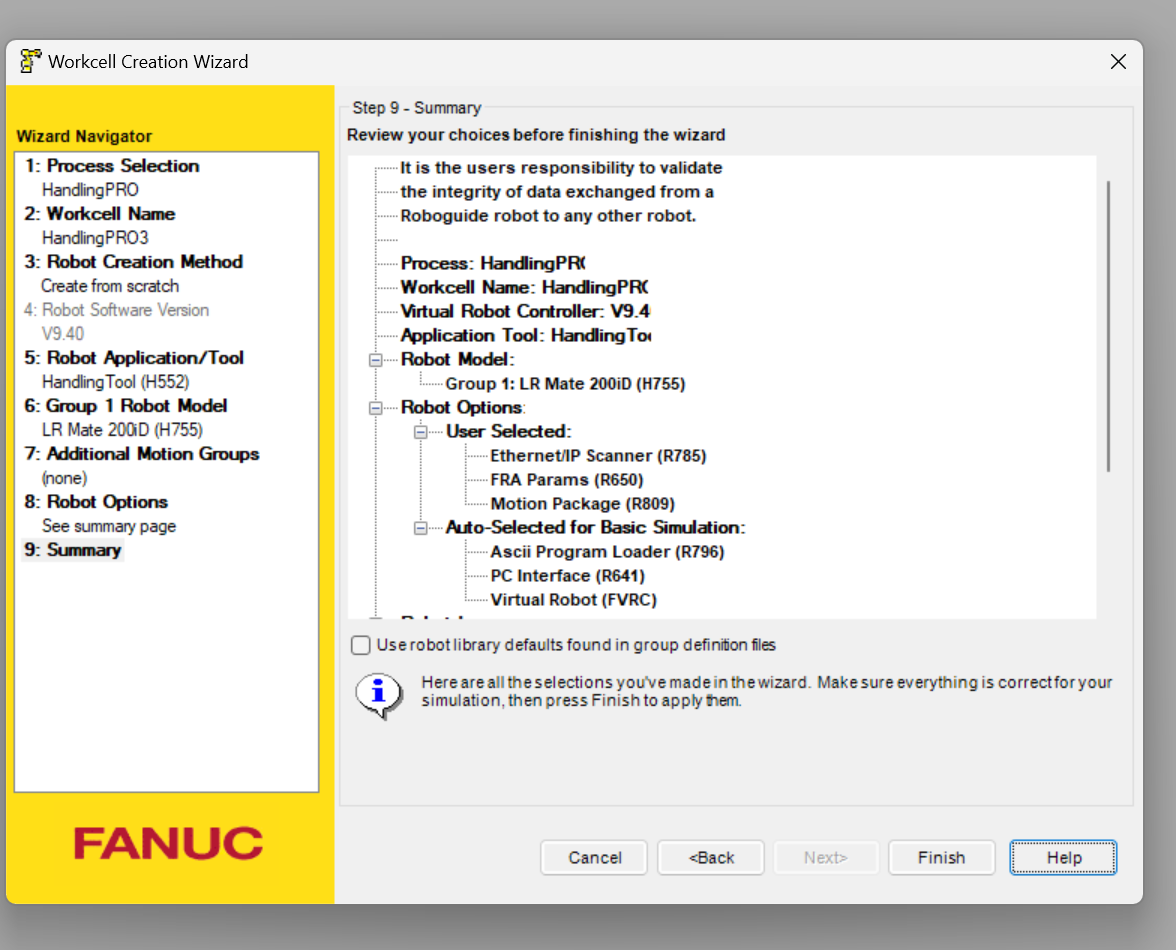
Done!
Start Teach Pendant
Ethernet/IPなどの設定をするためTeach Pendantを起動します。
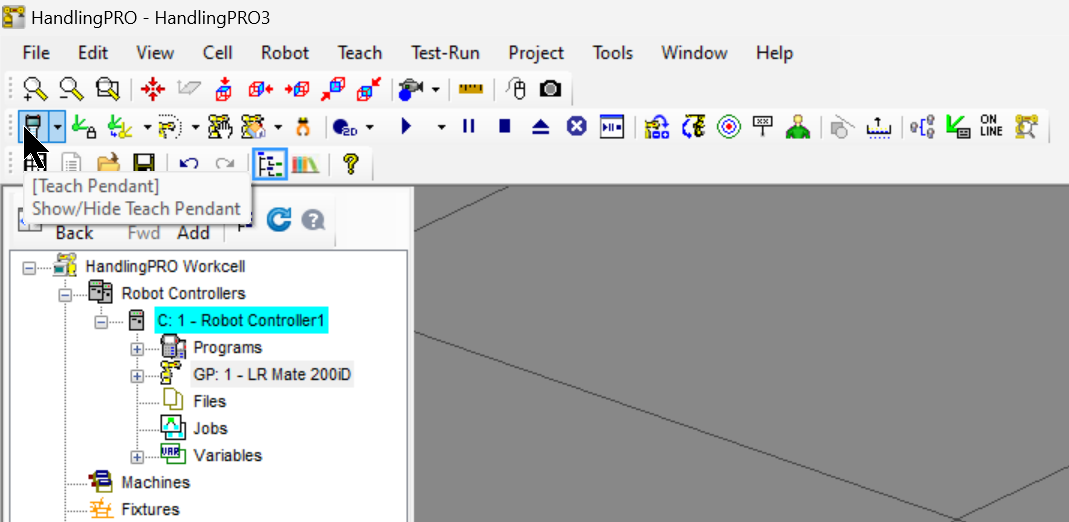
Done!Teach Pendantが起動しました。

Host Comm
今度はHost Commを設定します。つまりRobot ControllerのIPアドレスを設定します。
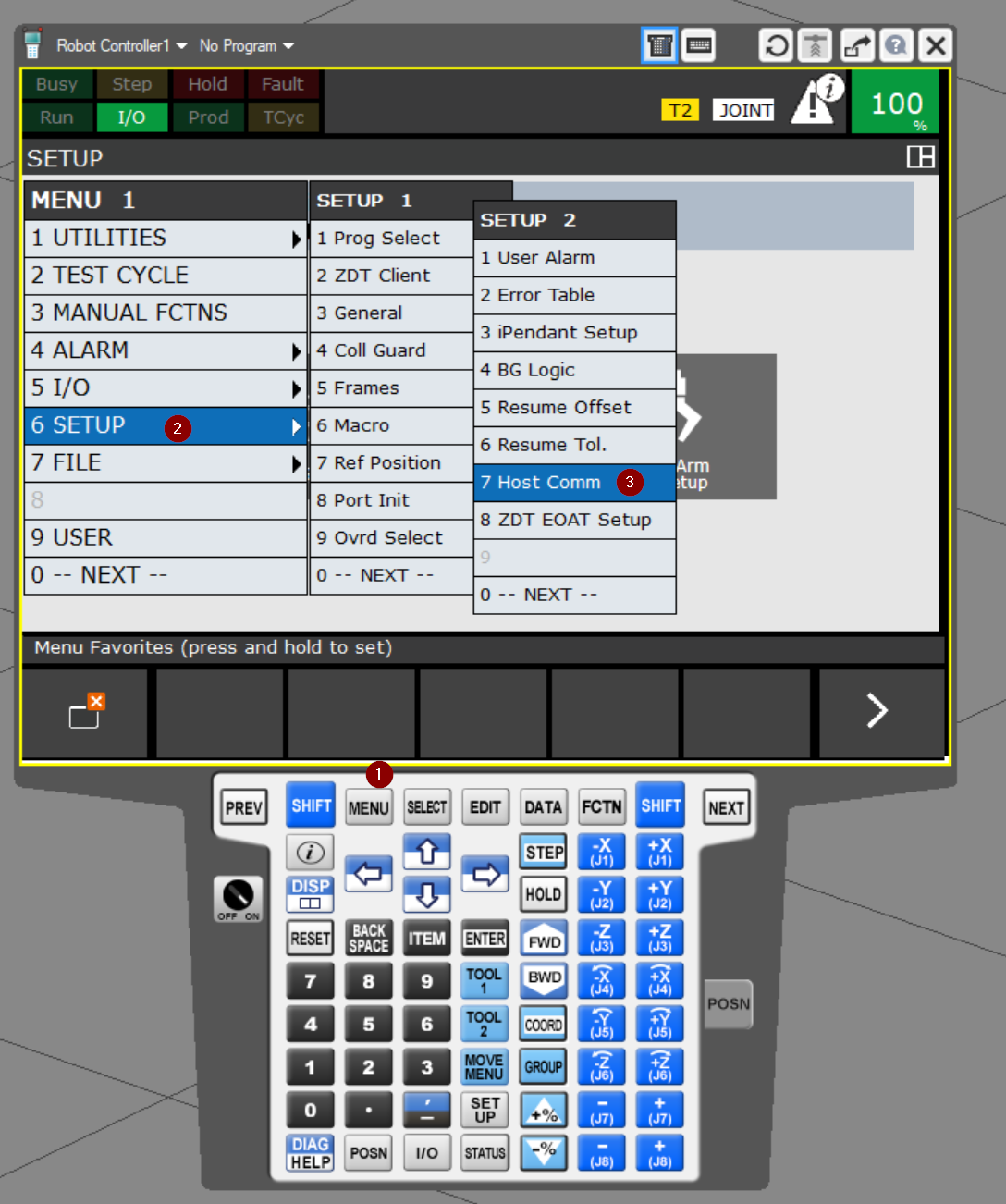
Menuボタンをクリックし>6 SETUP>SETUP 2>7 Host Commを開きます。
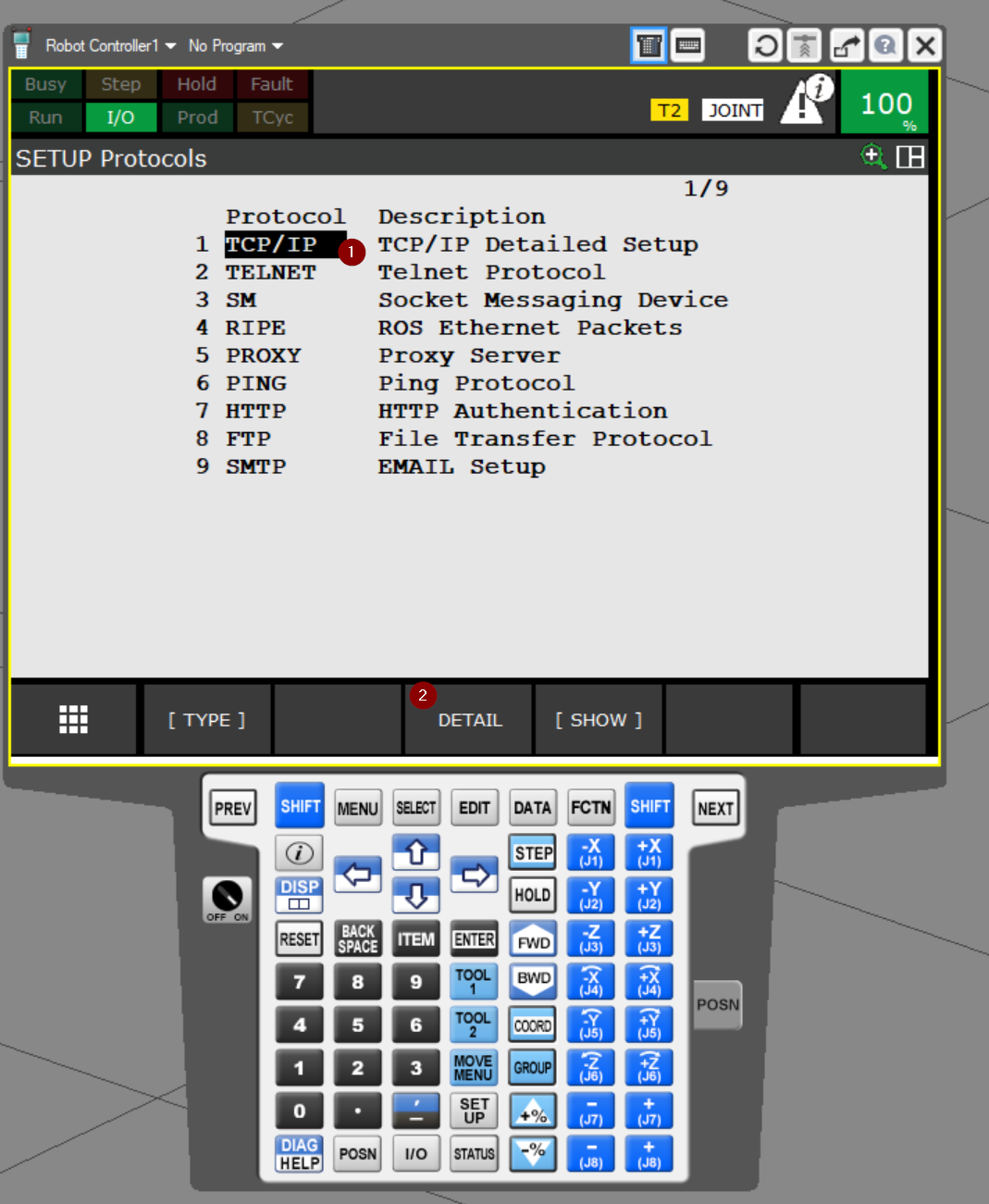
Host Commの設定画面が表示されました。
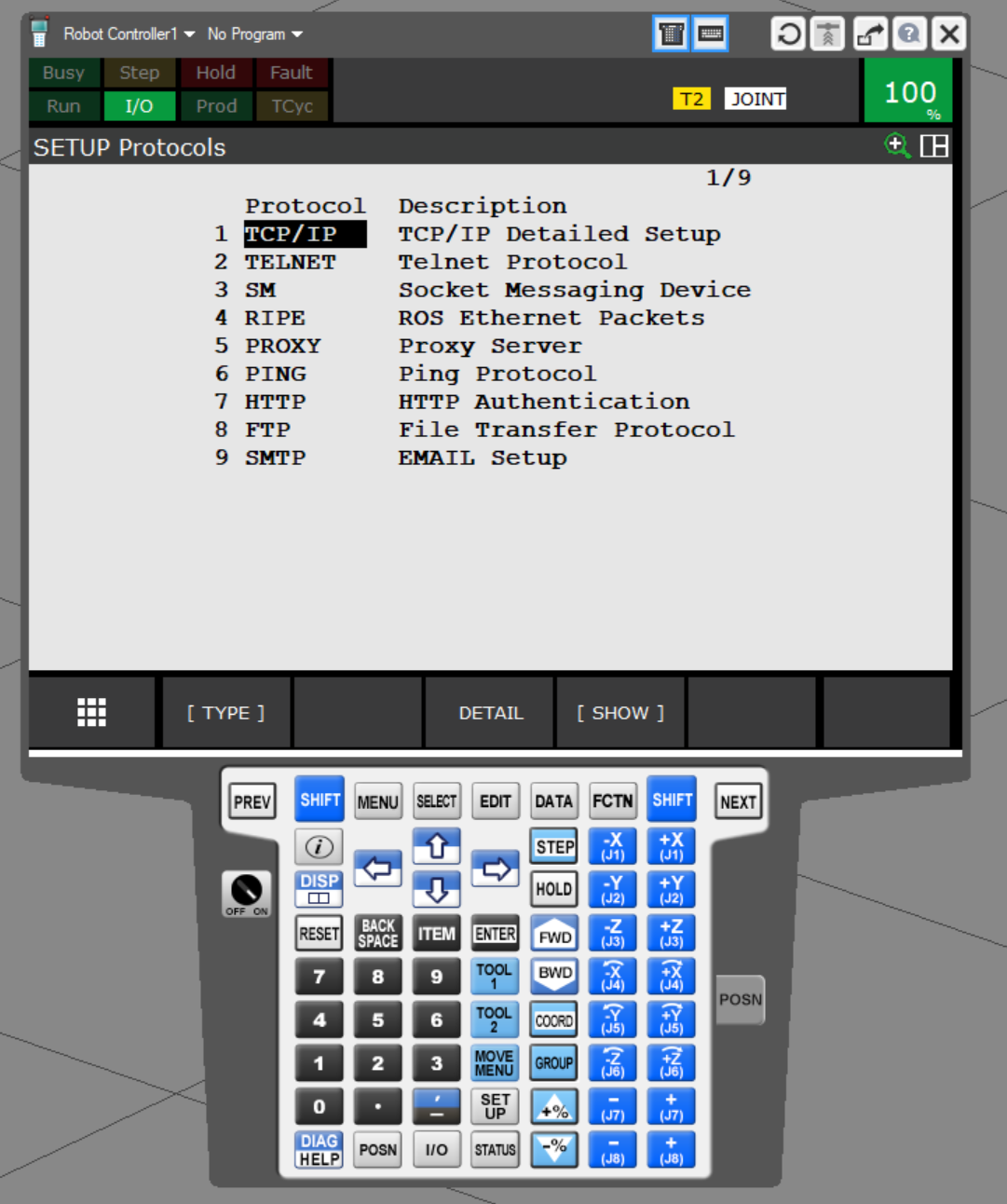
TCP/IP Protocolを選び>DETAILをクリックします。
TCP/IPの設定画面が表示されます。
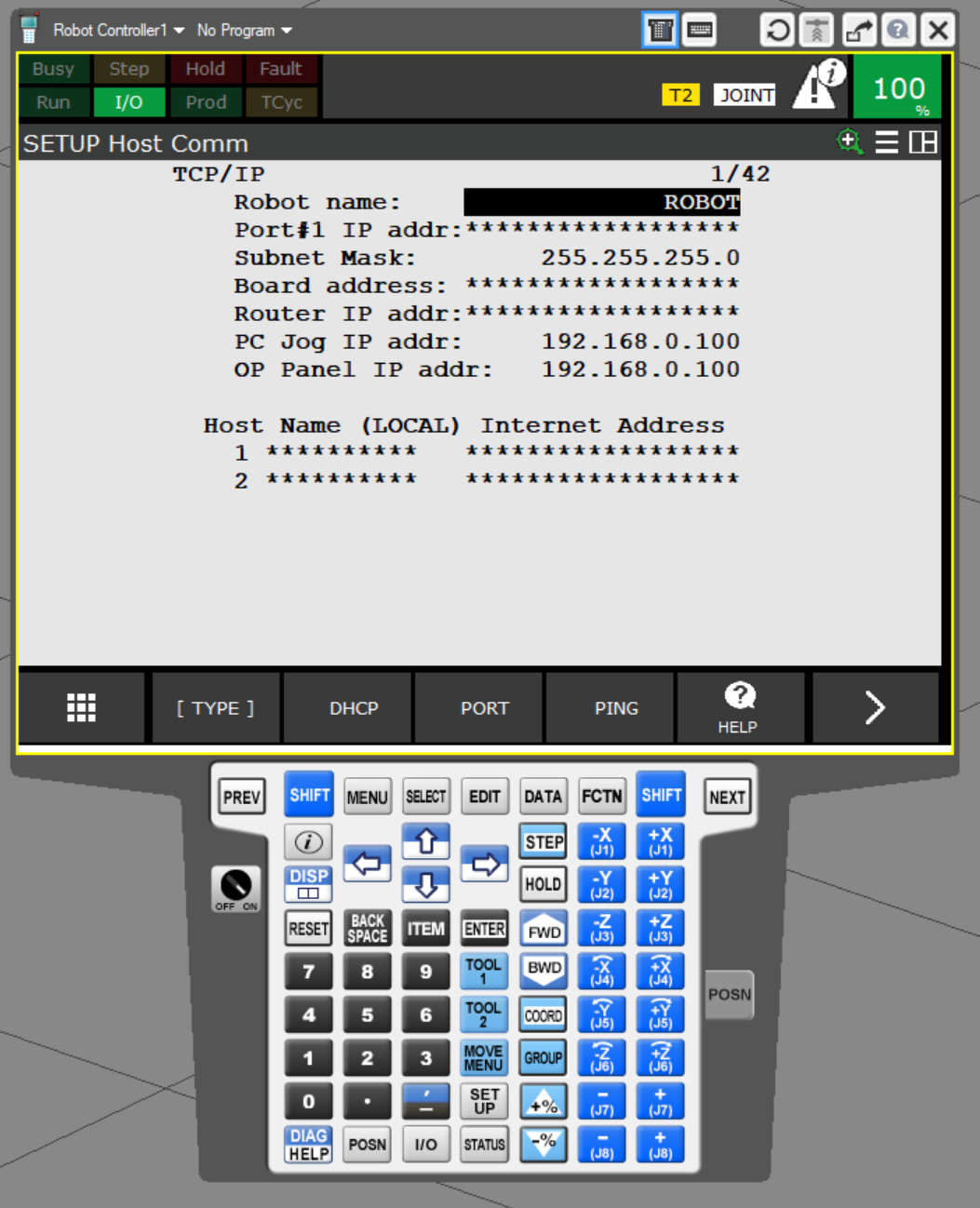
Port#1 IP addrではRobot ControllerのPort1のIPアドレス設定になります。
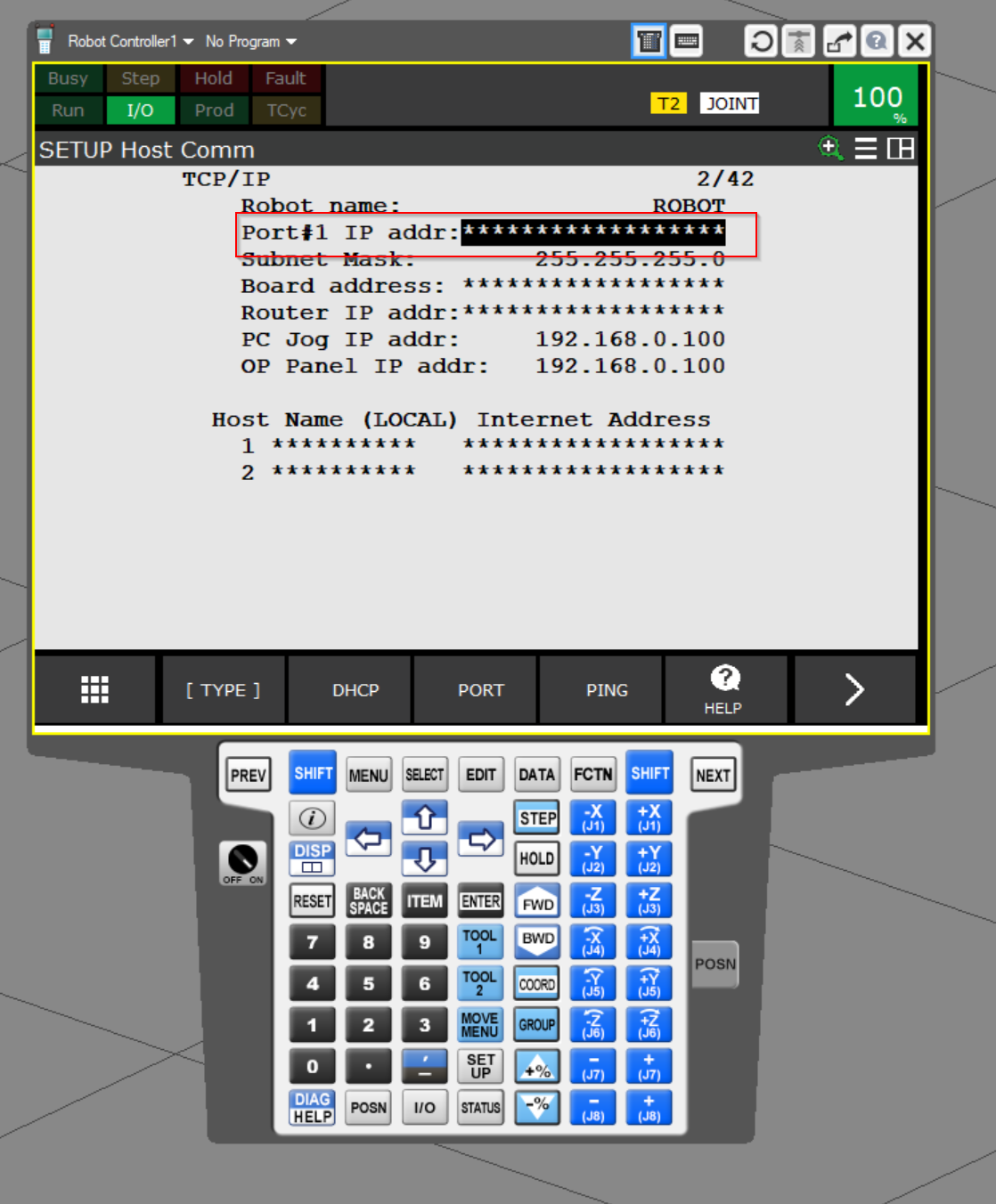
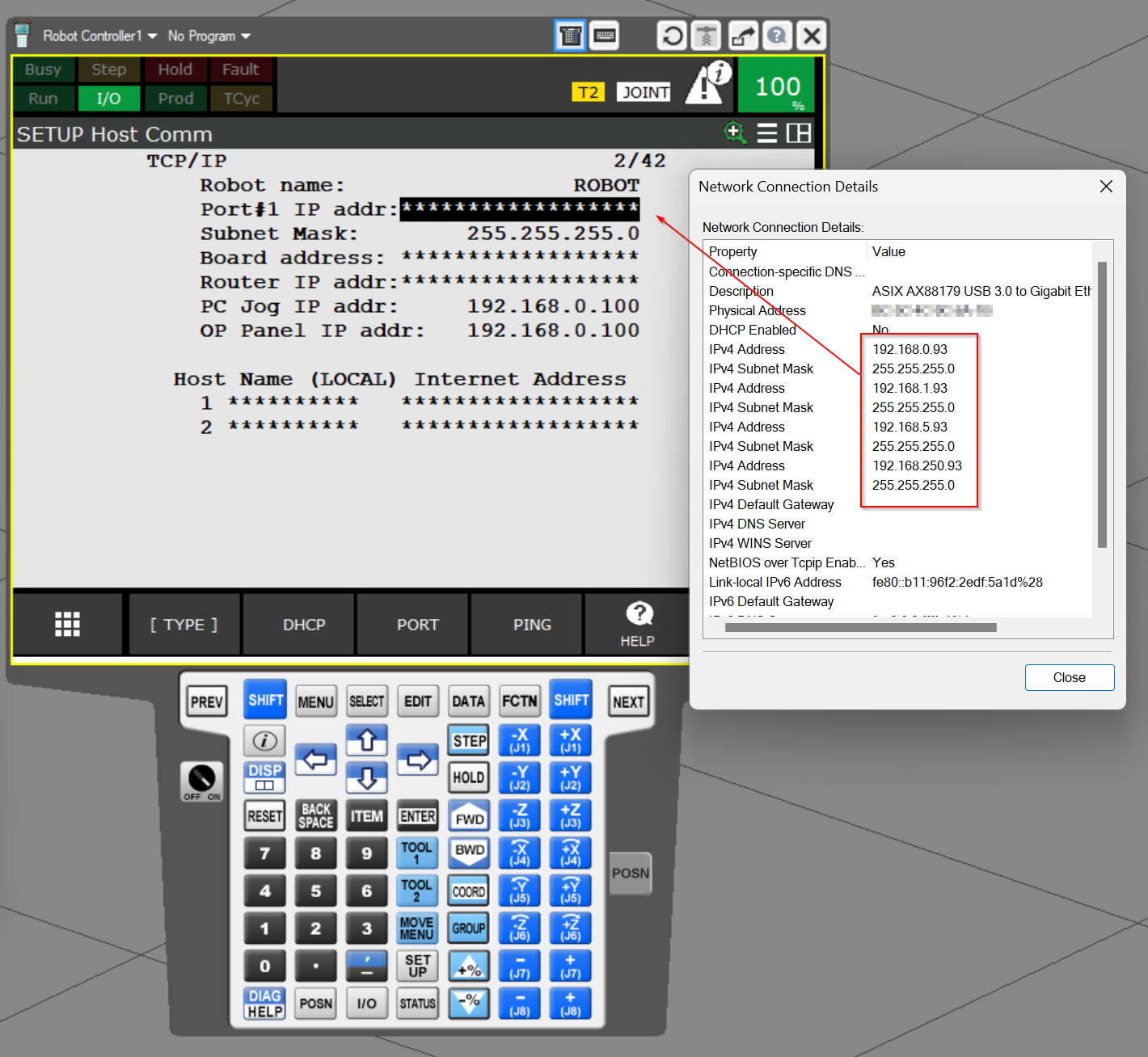
いまはROBOGUIDEを使用していますので、IPはPCにあるネットワークAdapterに合わせて設定してください。
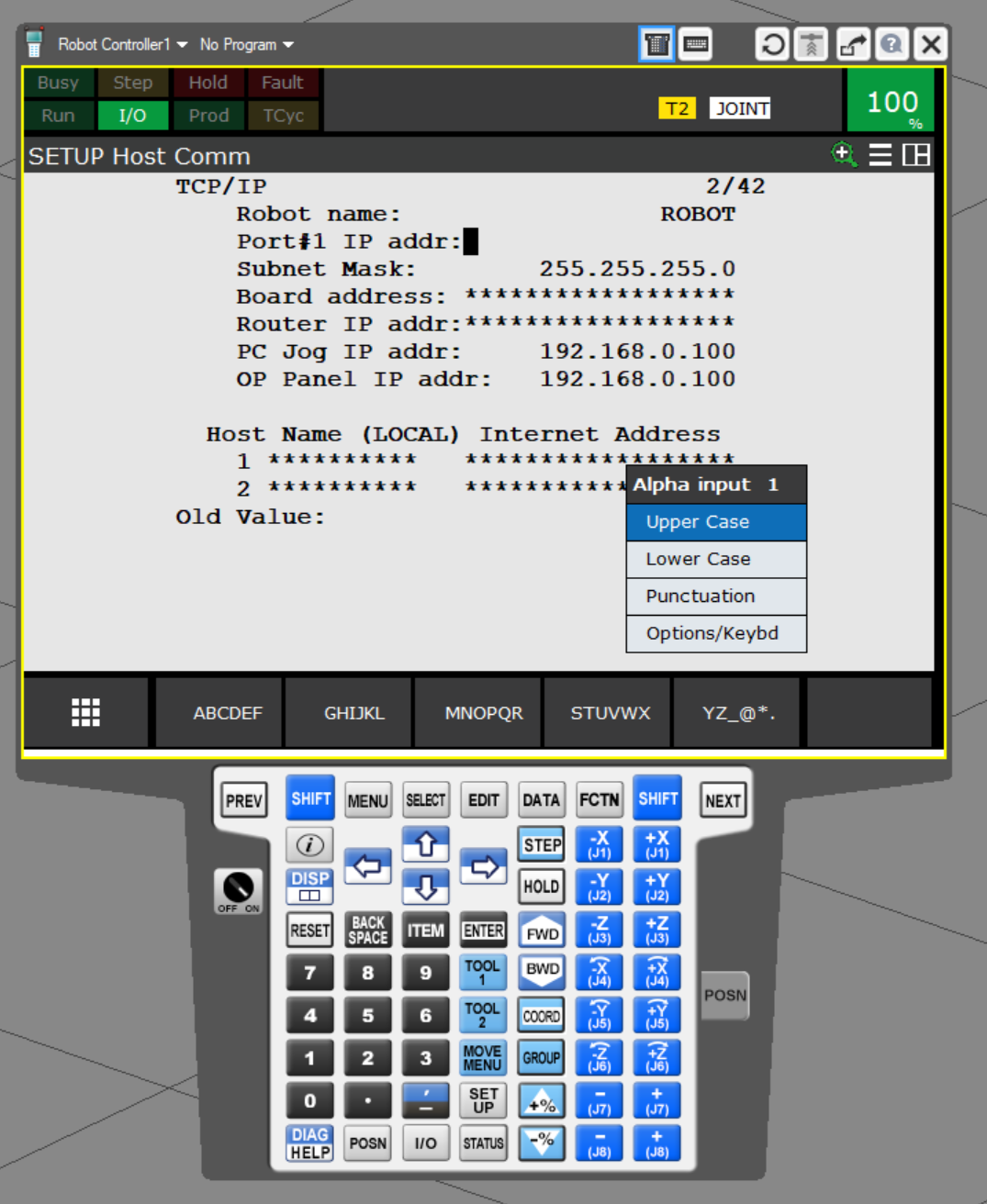
Port#1 IP addrをクリックするとKeyboardから入力できます。
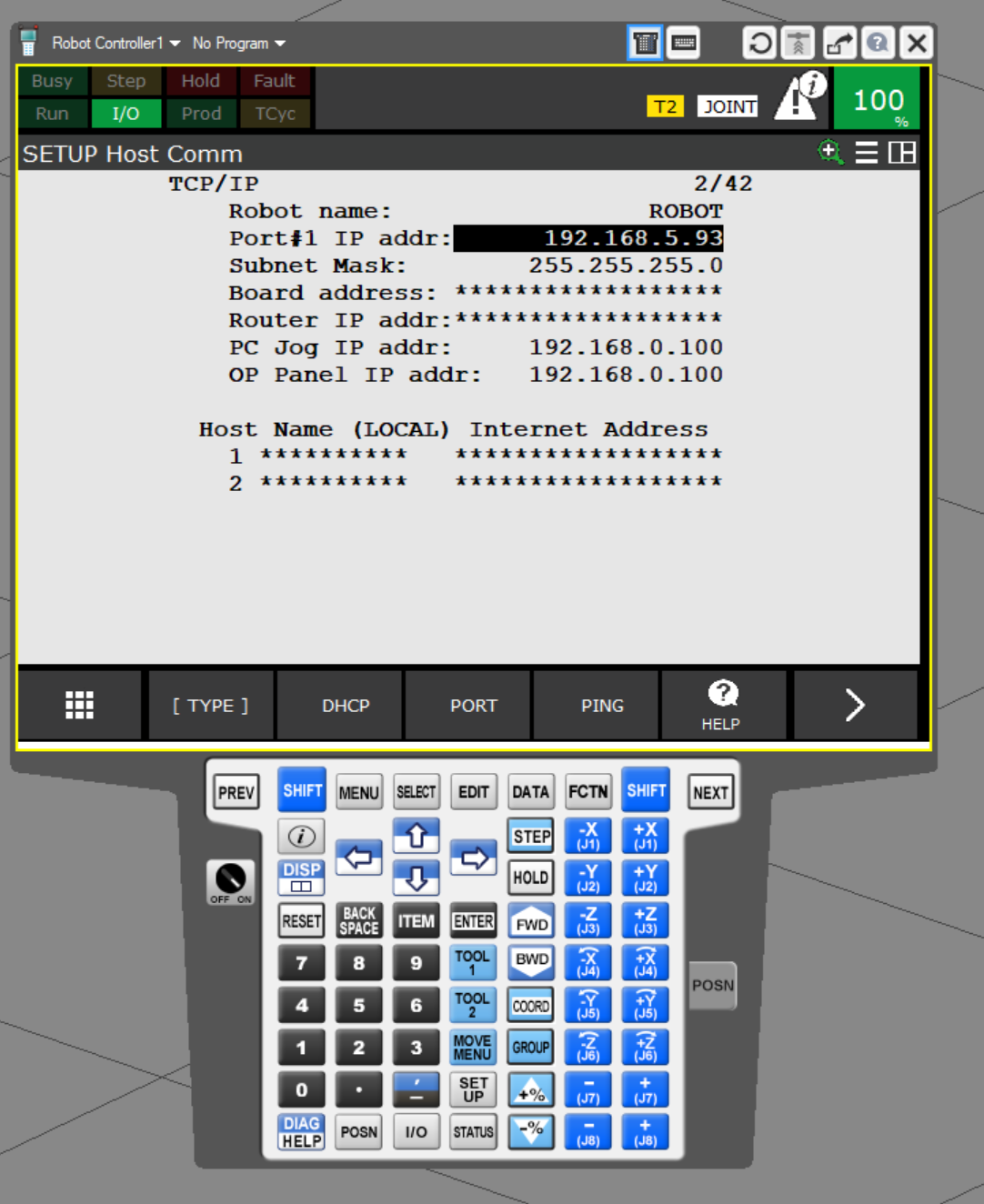
これでOKです。
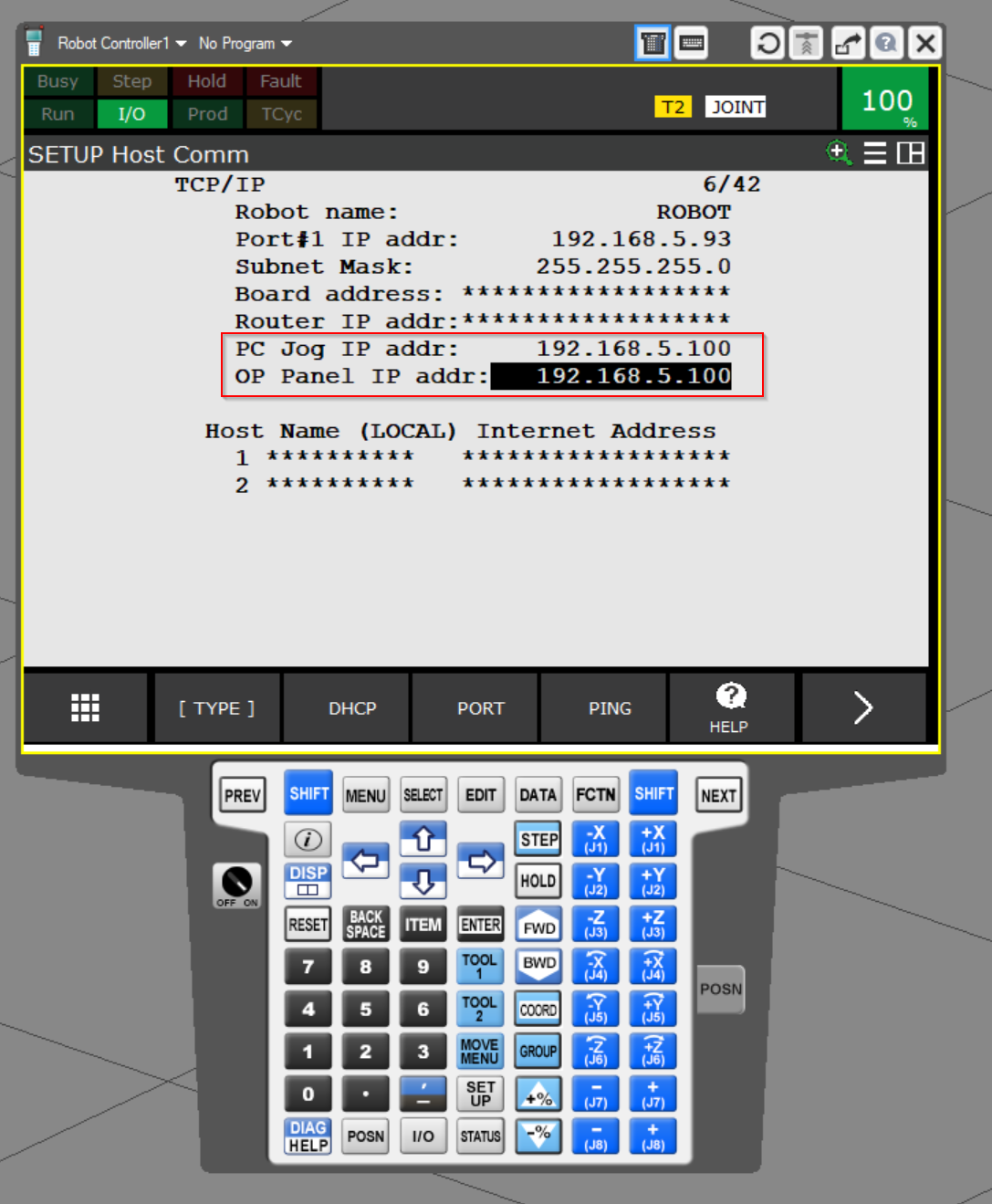
次はPC Jog IP addrとOP Panel IP addrを設定しましょう。
PING TEST
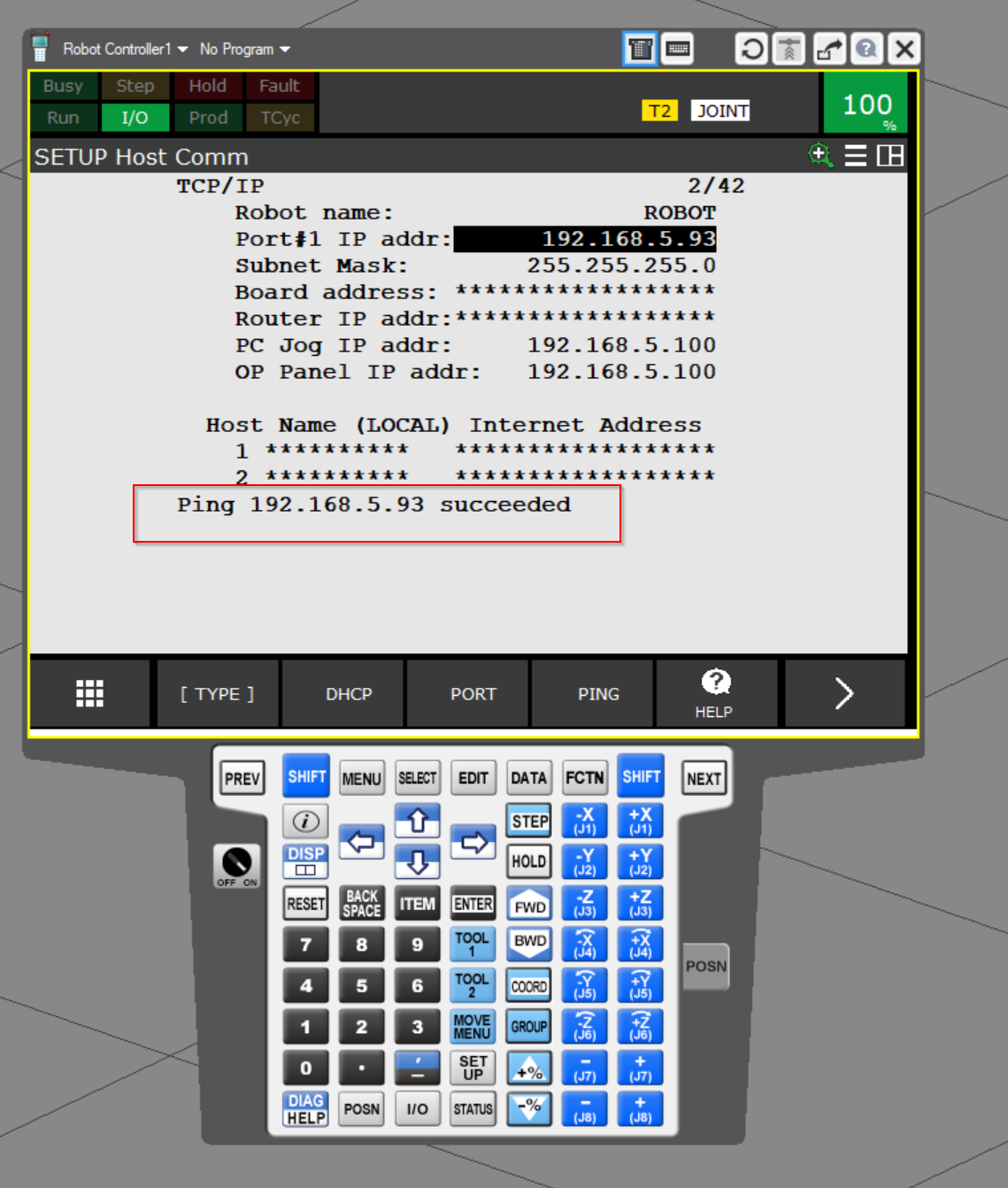
Port#1 IP addrを選んでる状態でPINGボタンをクリックし接続テストしましょう。
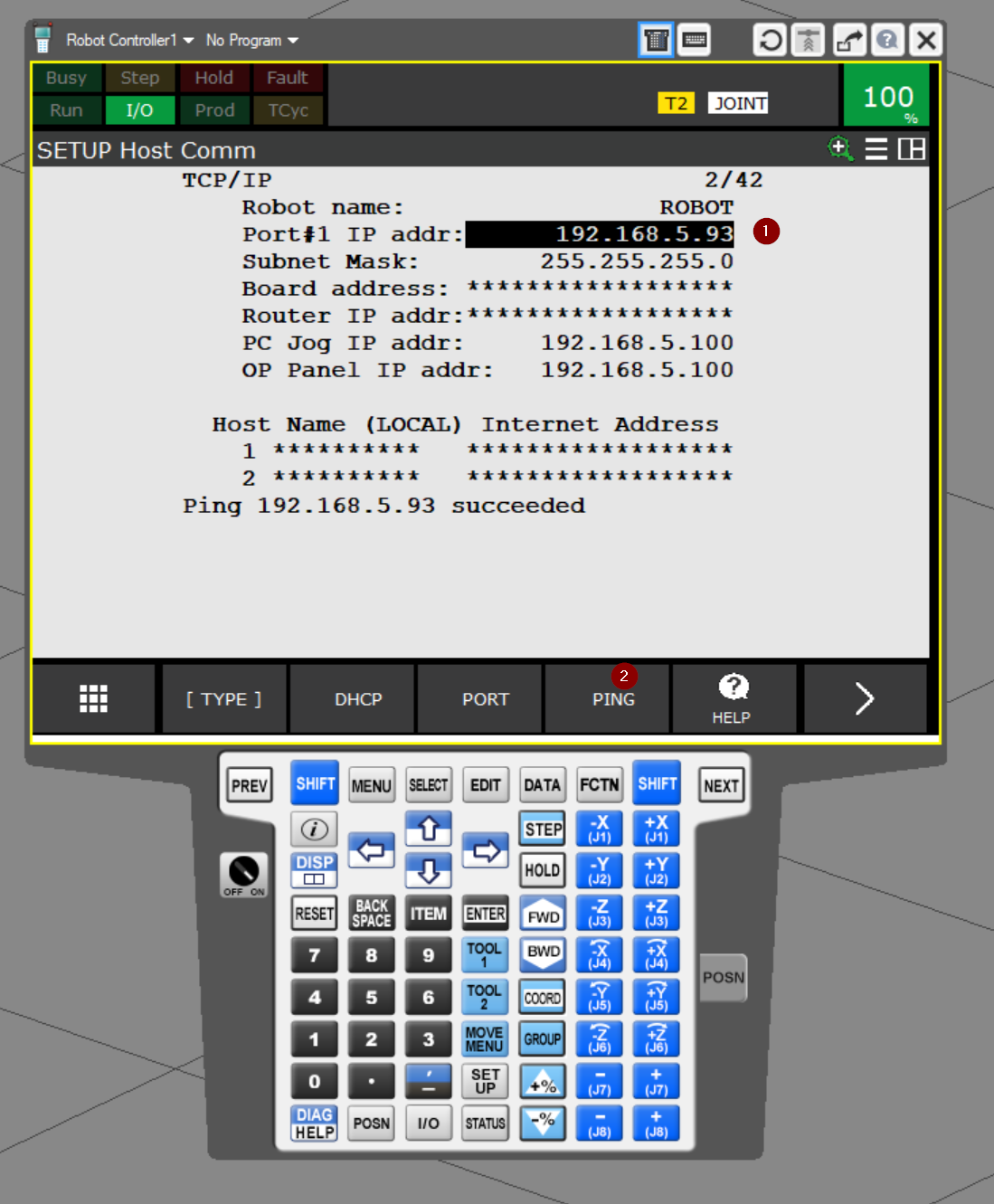
Successdedのメッセージが来たので、Host Commの設定はOkです。
Ethernet/IP Scanner
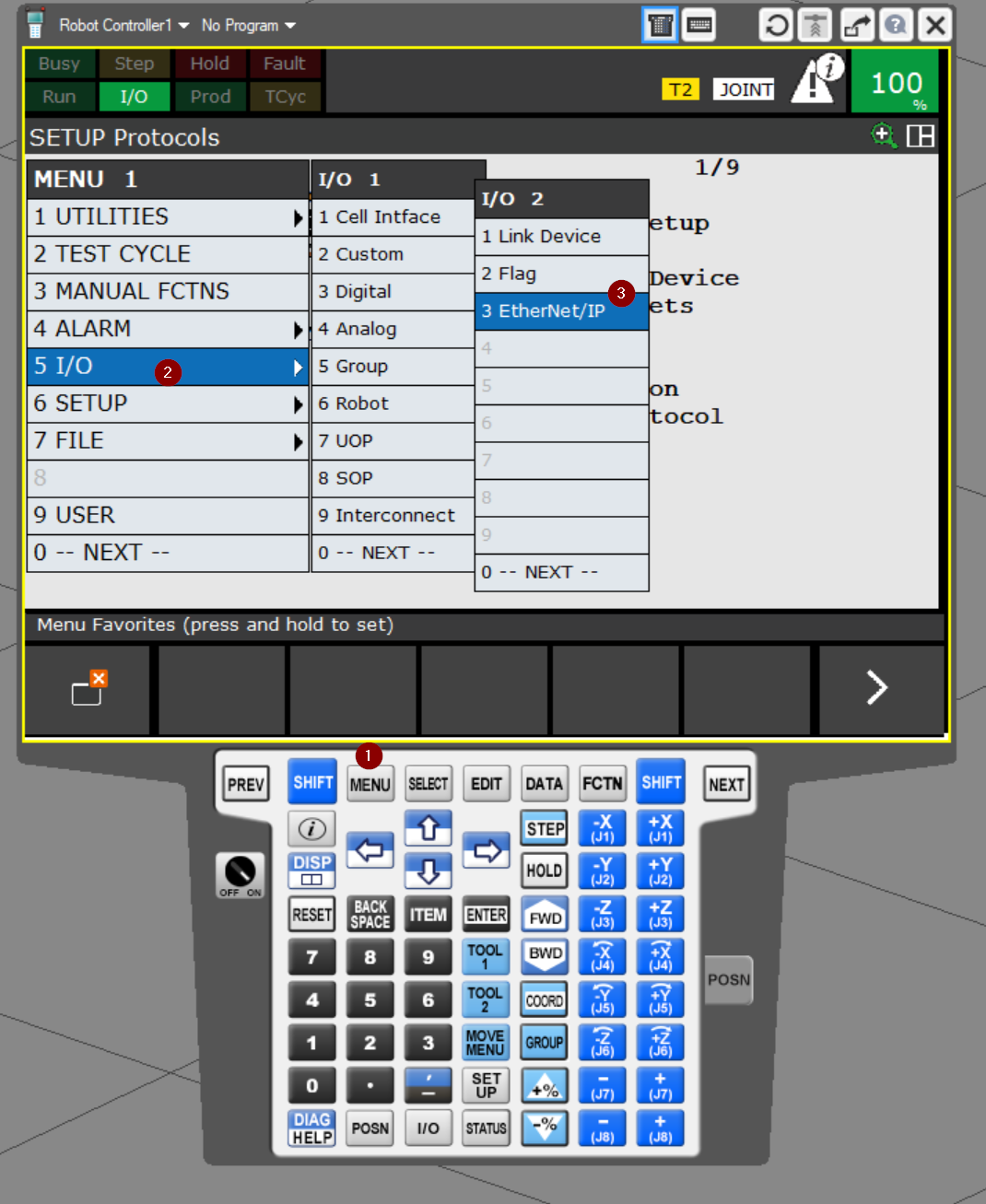
次はEthernet/IP Scannerの設定を行うため5 I/O>I/O 2>3 Etherent/IPを開きます。
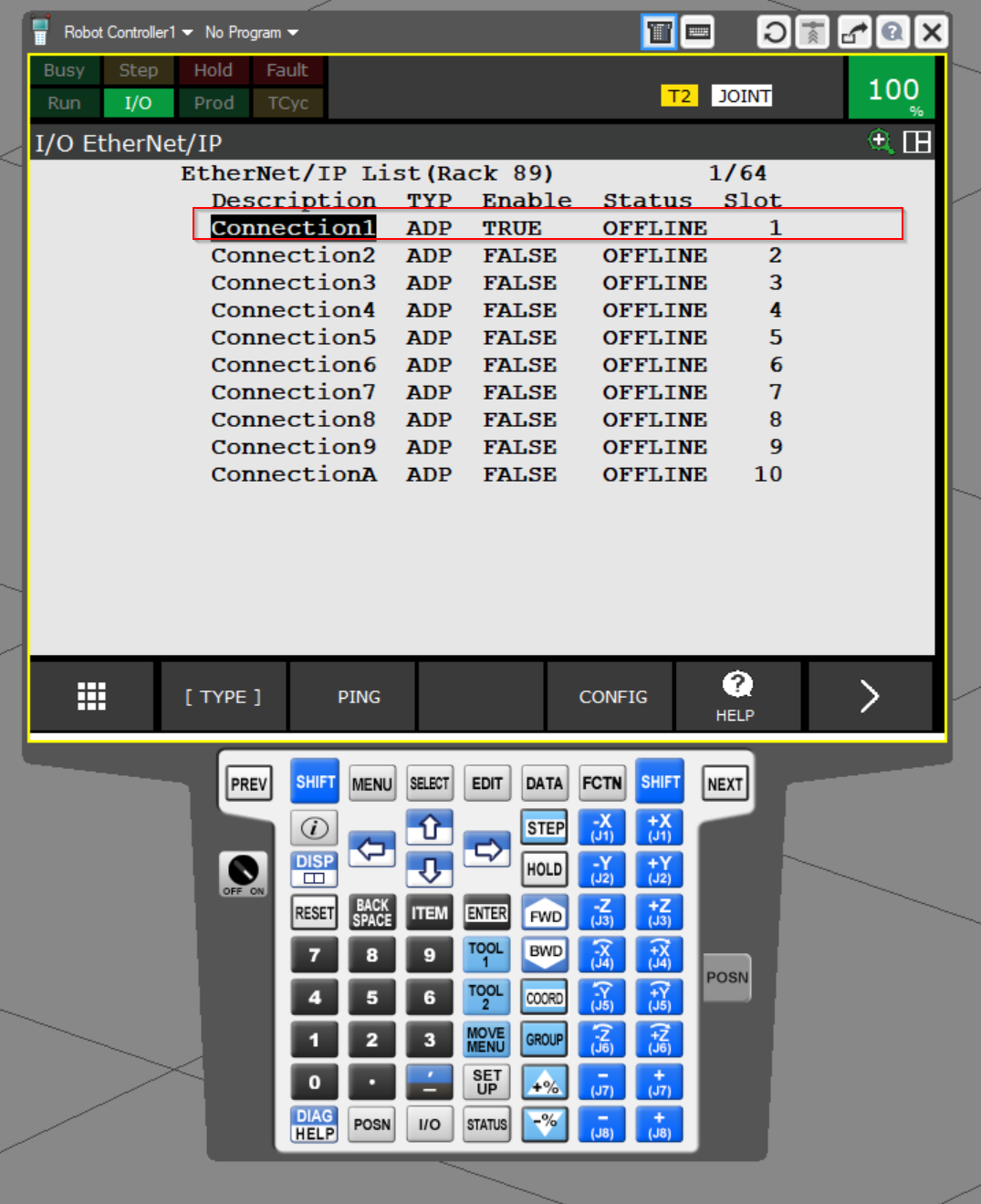
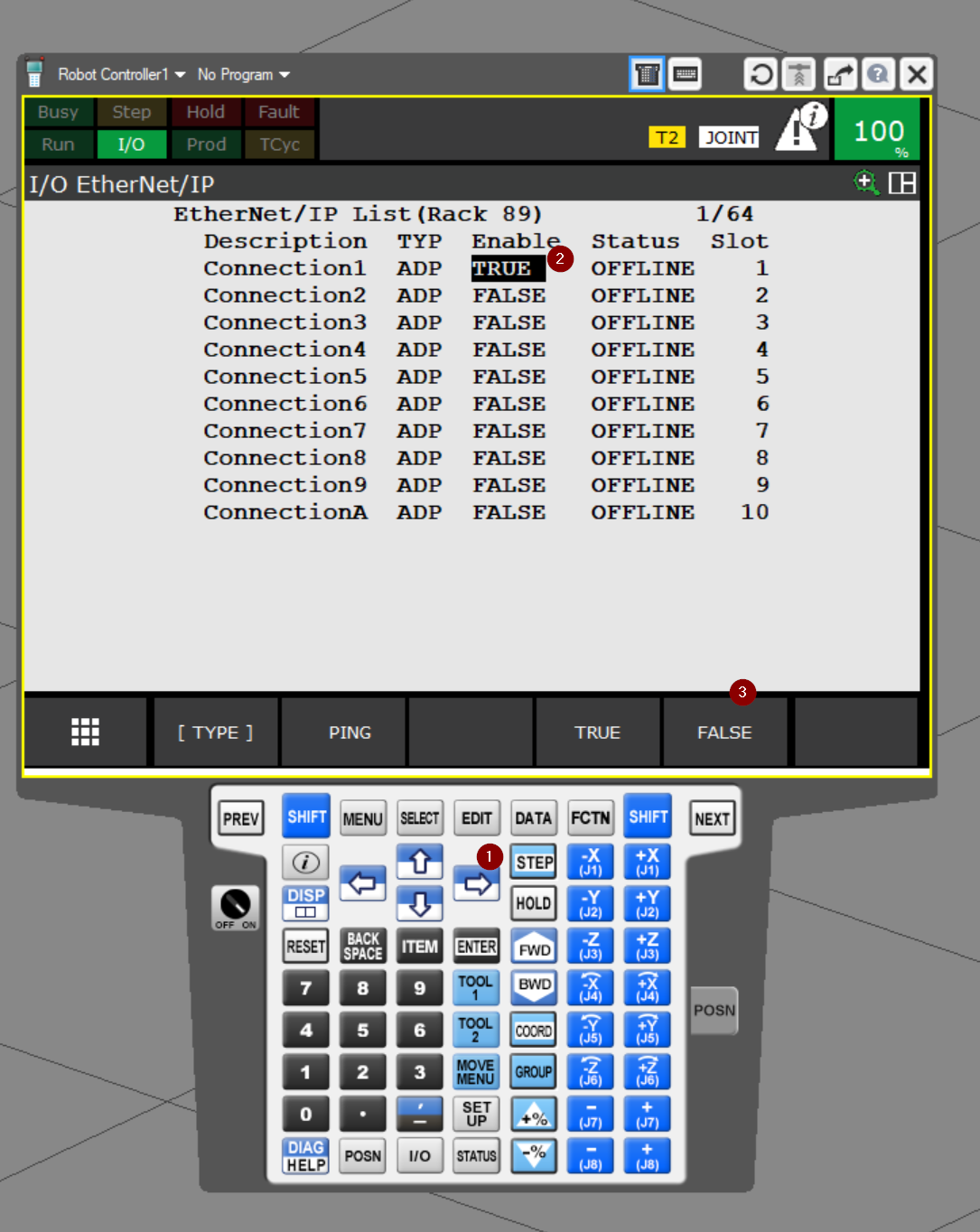
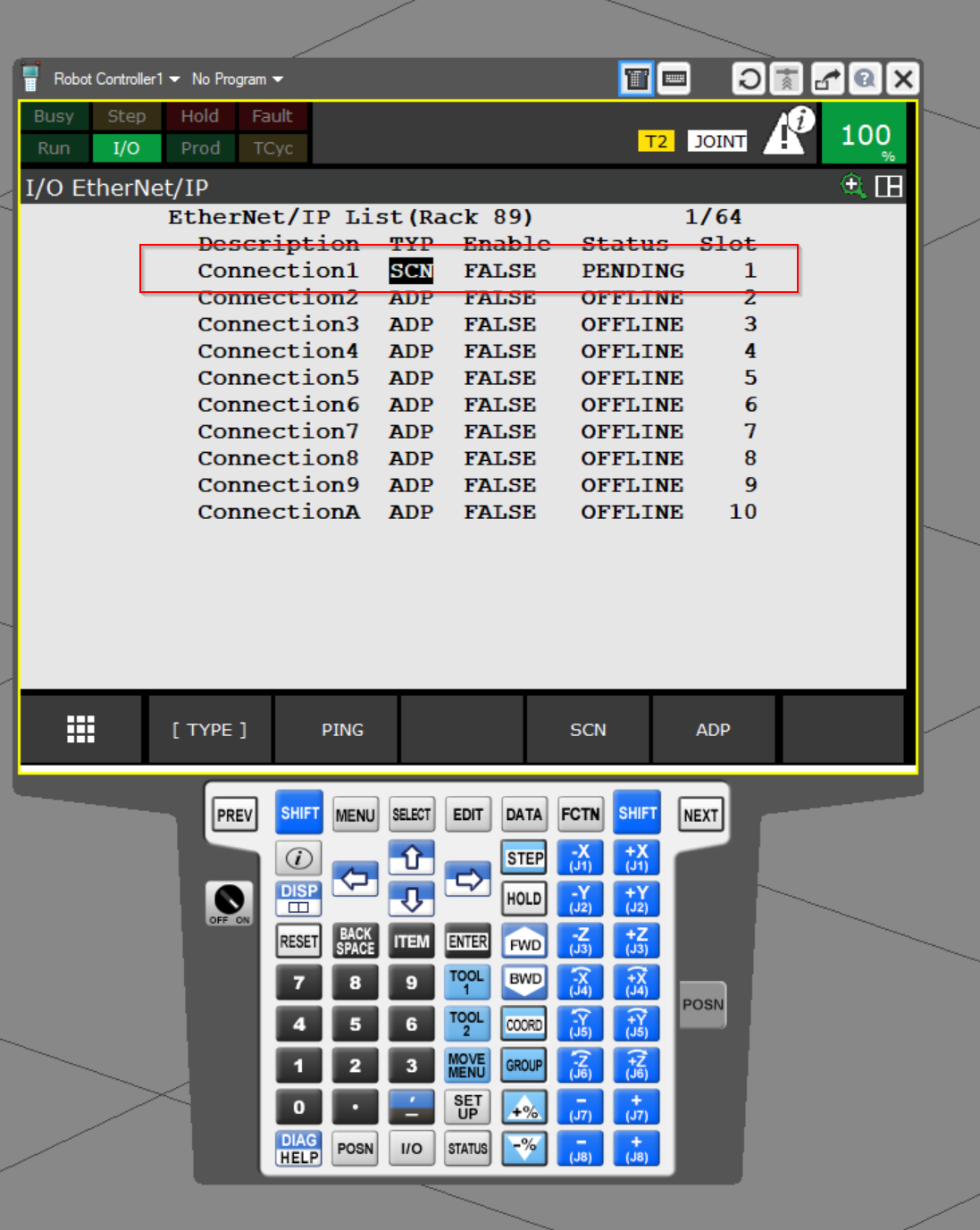
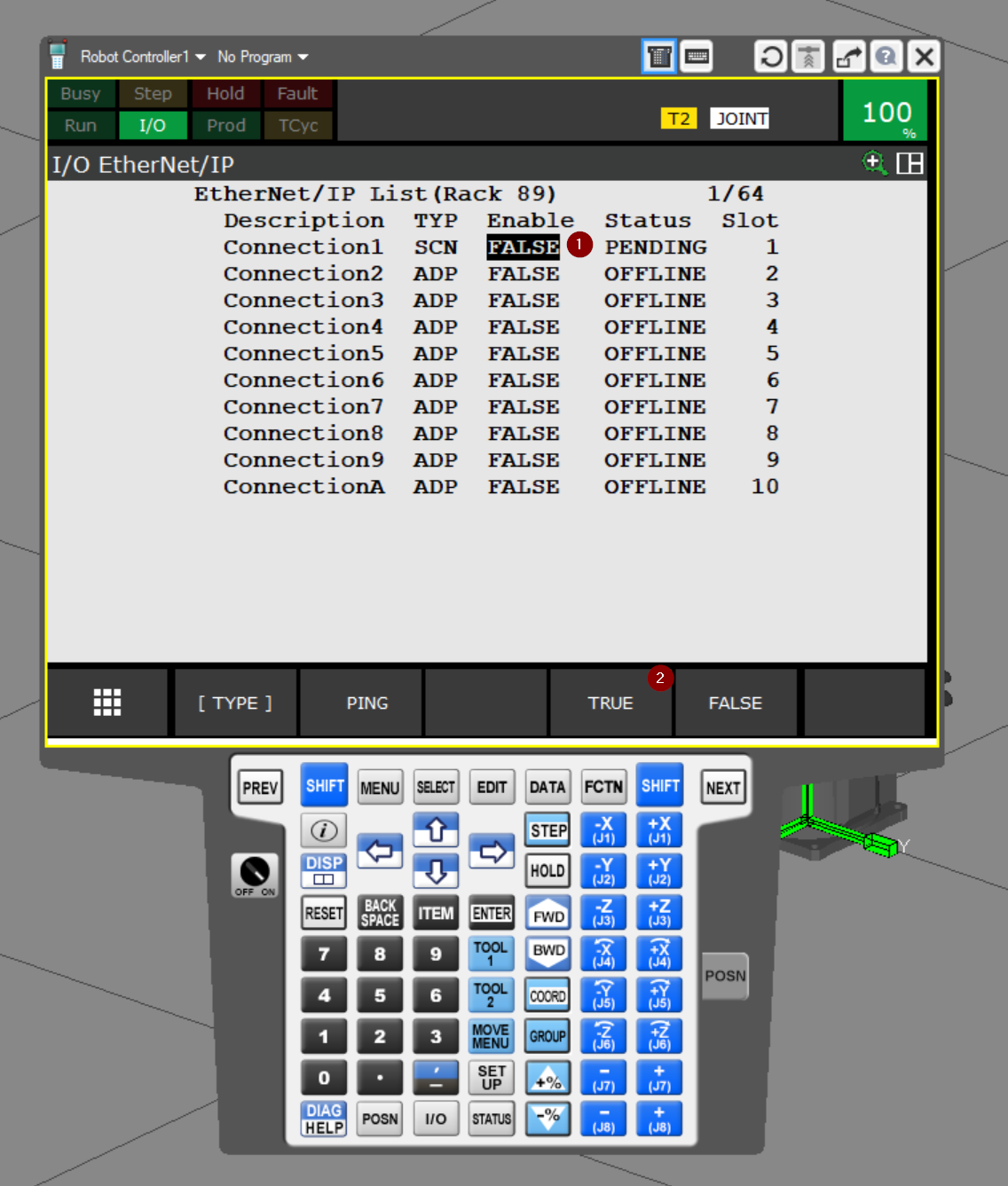
I/O Ethernet/IP の画面が表示されます。
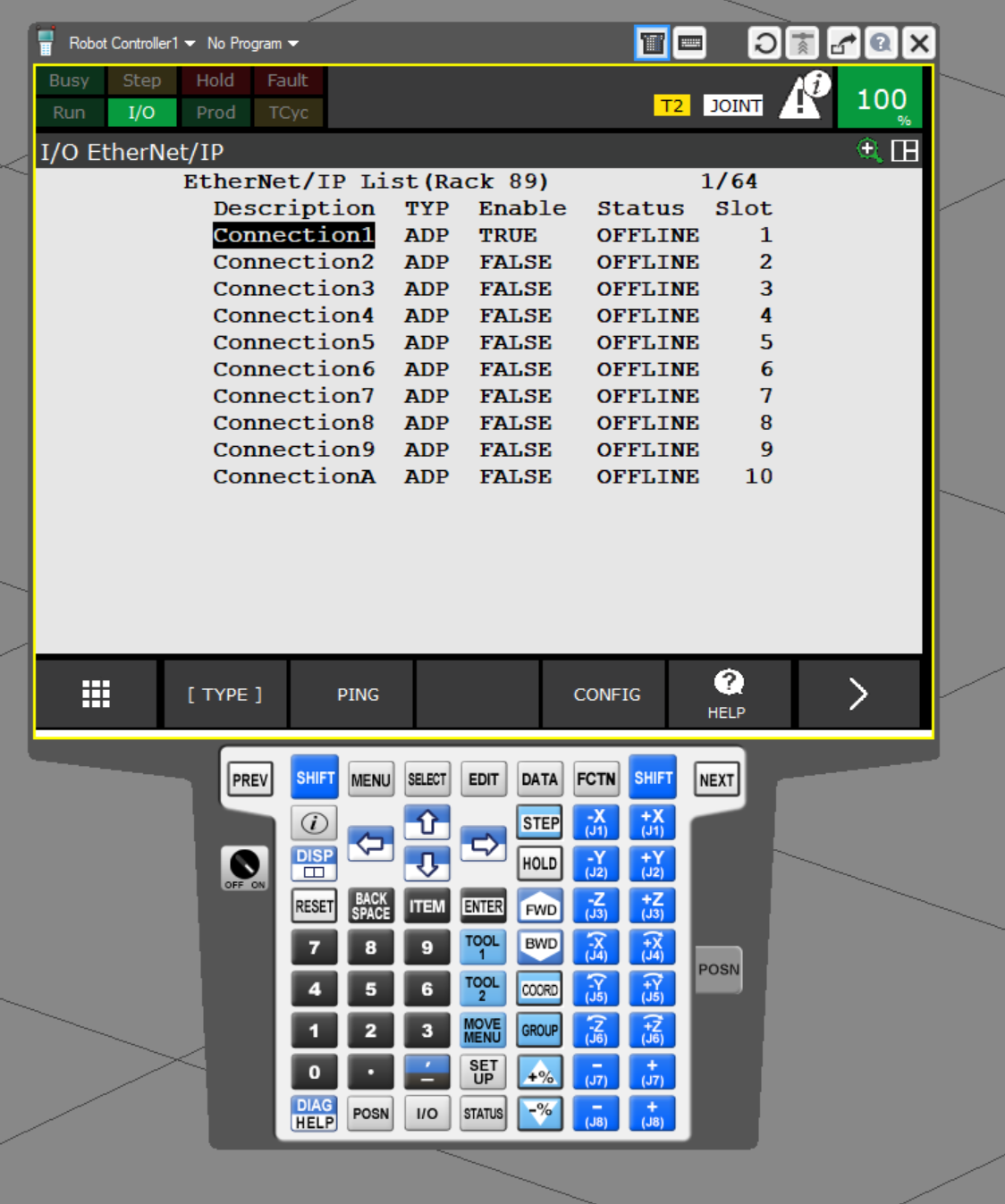
今回使用するのはConnection1になります。
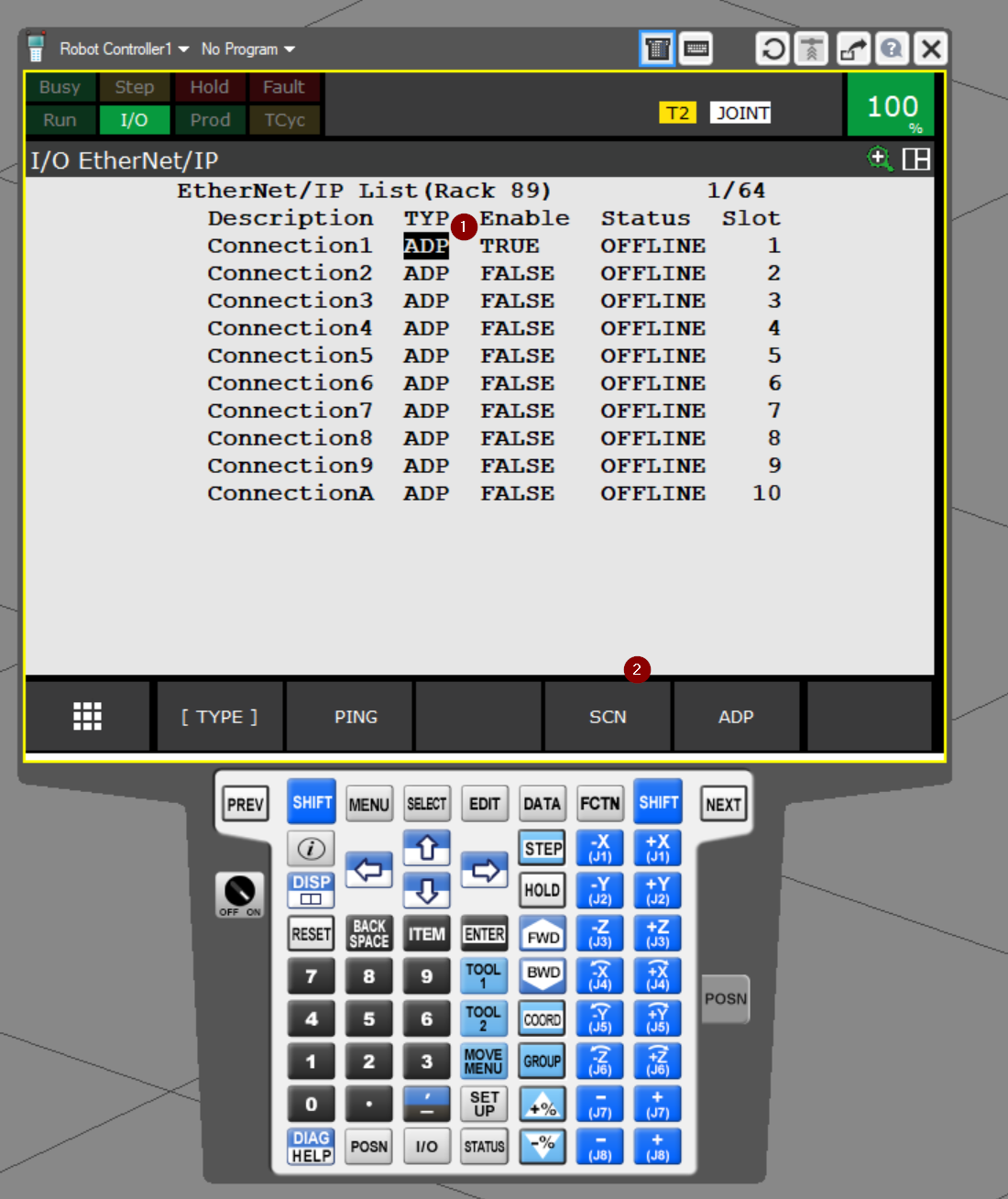
Change to SCN
TYPを選択し>SCNボタンをクリックします。
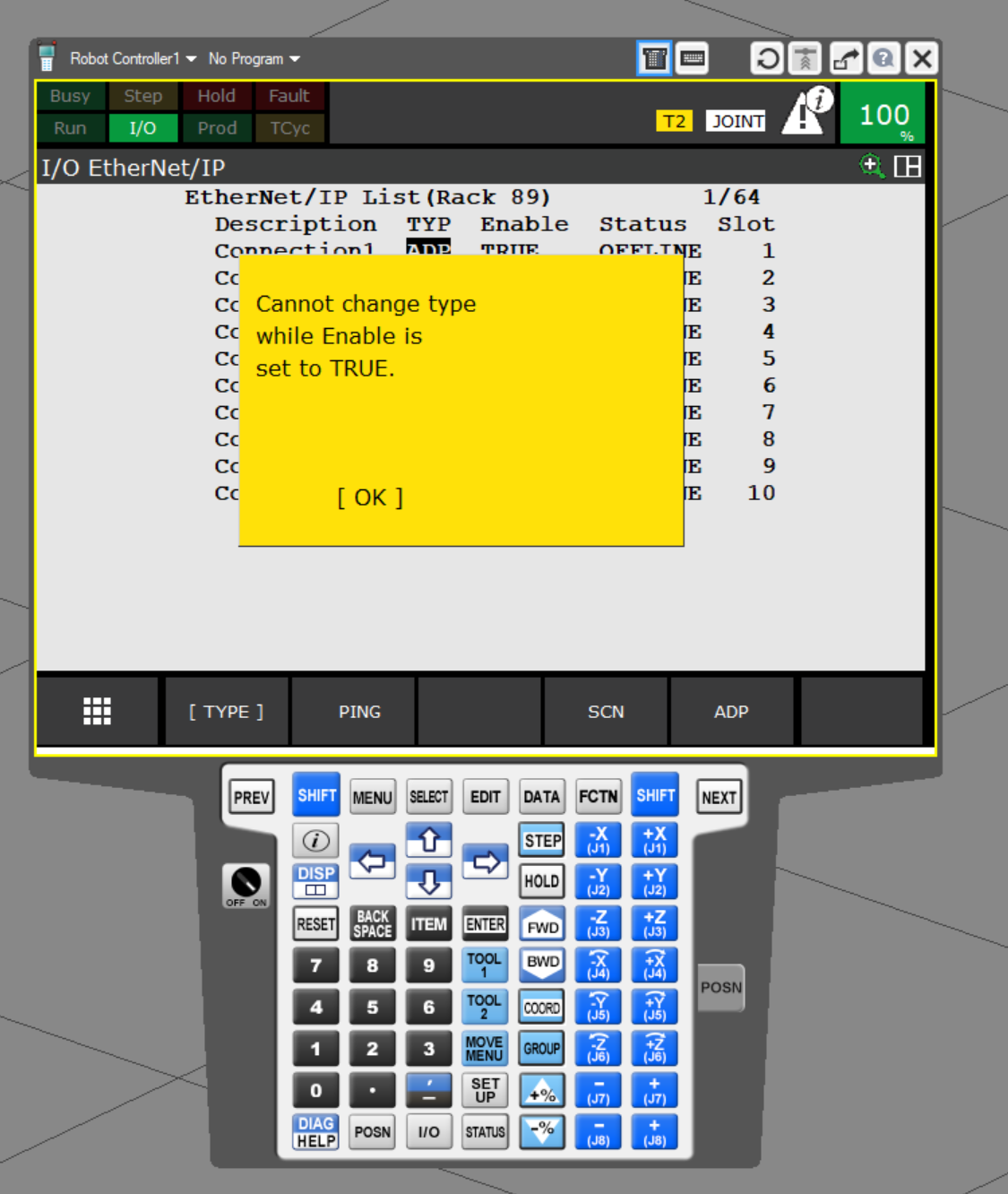
いまConnection1はEnableされている状態なので、ROBOGUIDEがTYPの設定変更を拒否しました。
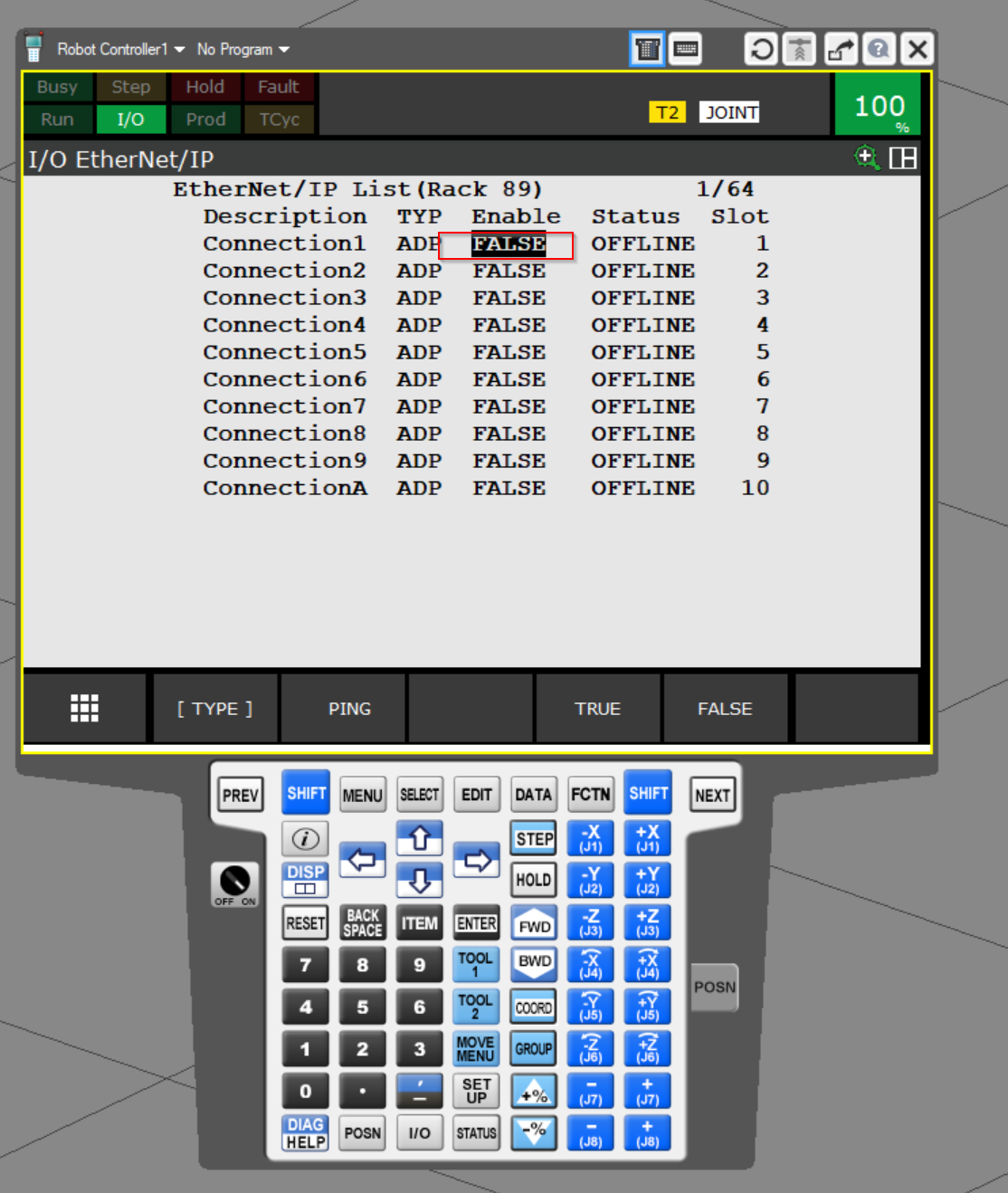
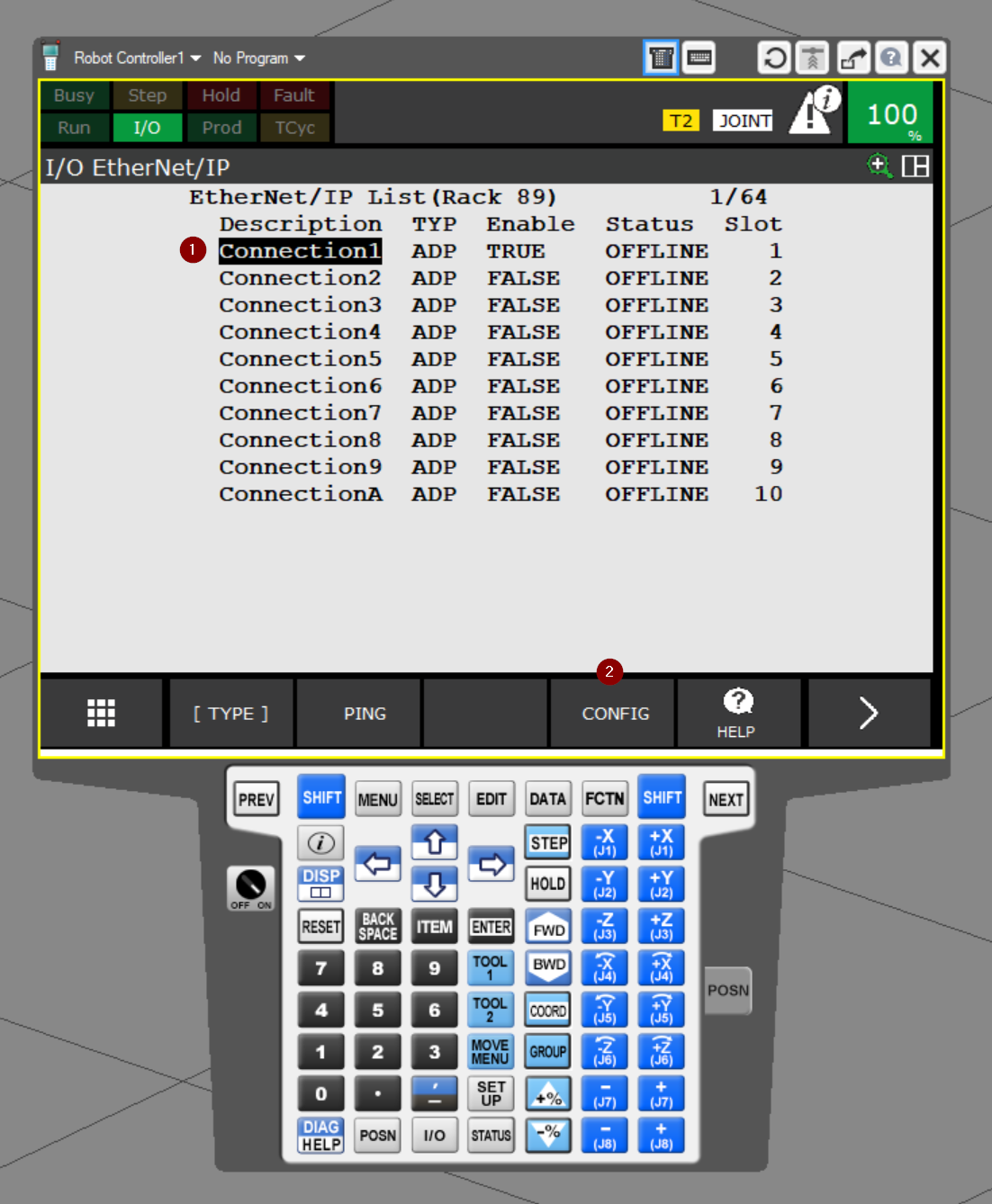
Disable the Function
Enableの欄に移動し、FALSEボタンをクリックしConnection1の機能を無効します。
Done!
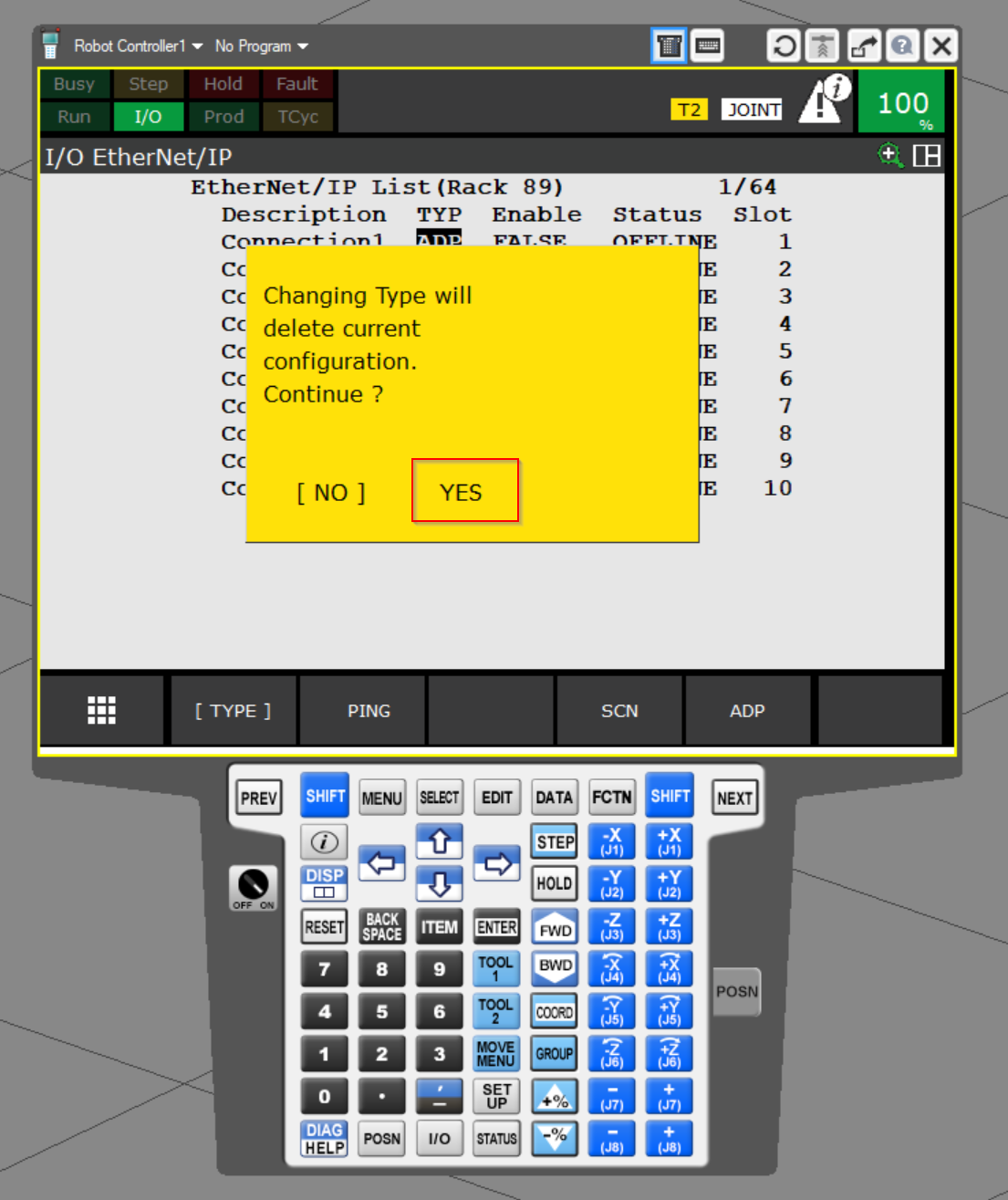
もう一回TYPを選択し、SCNをクリックします。
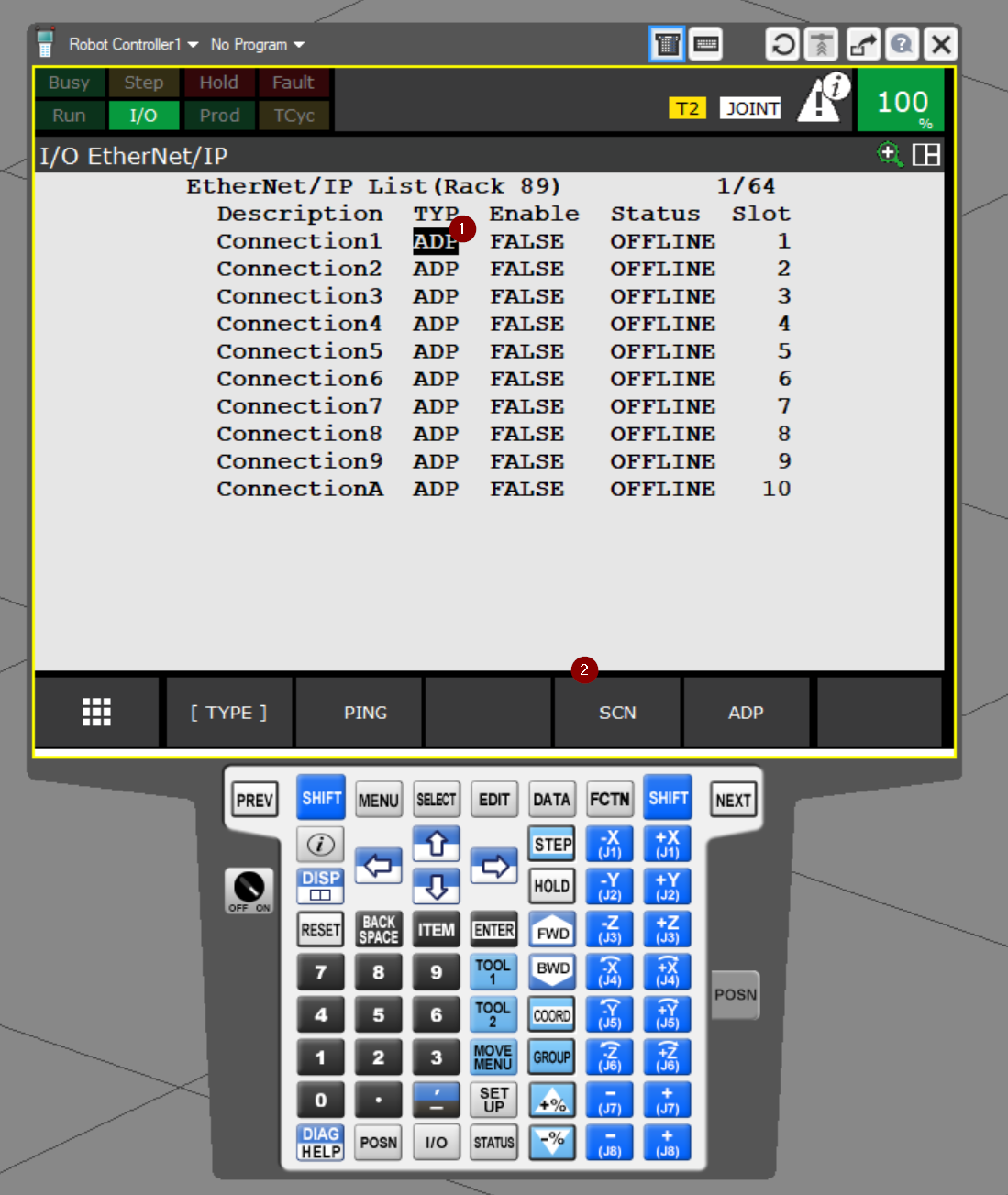
接続タイプを変更しますか?YESで進みます。
Done!いまScannerのStatusはPENDINGに変わりました。
CONFIG
次はConnection1のConfigurationを変更するため、Connection1を選び>CONFIGボタンをクリックします。
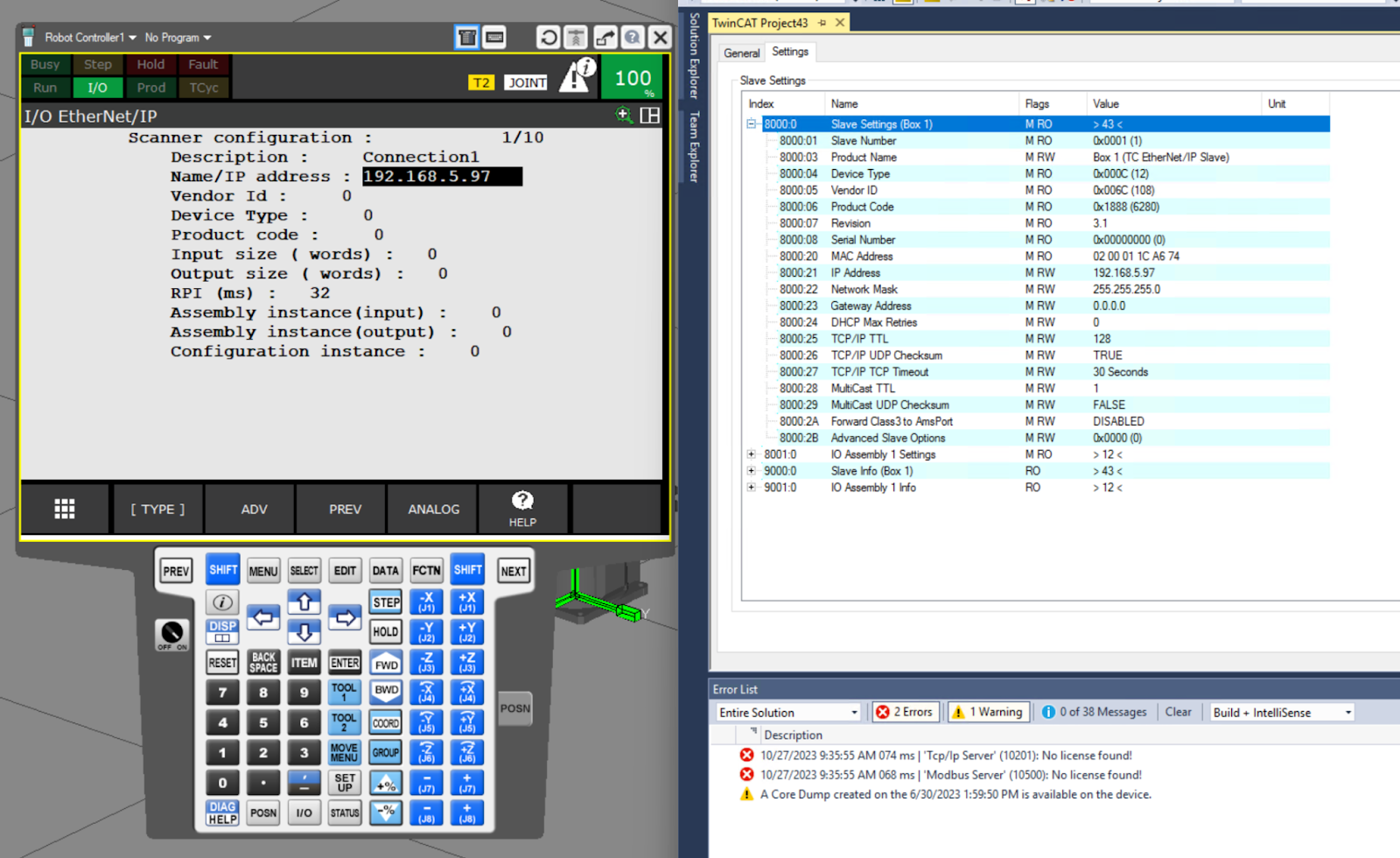
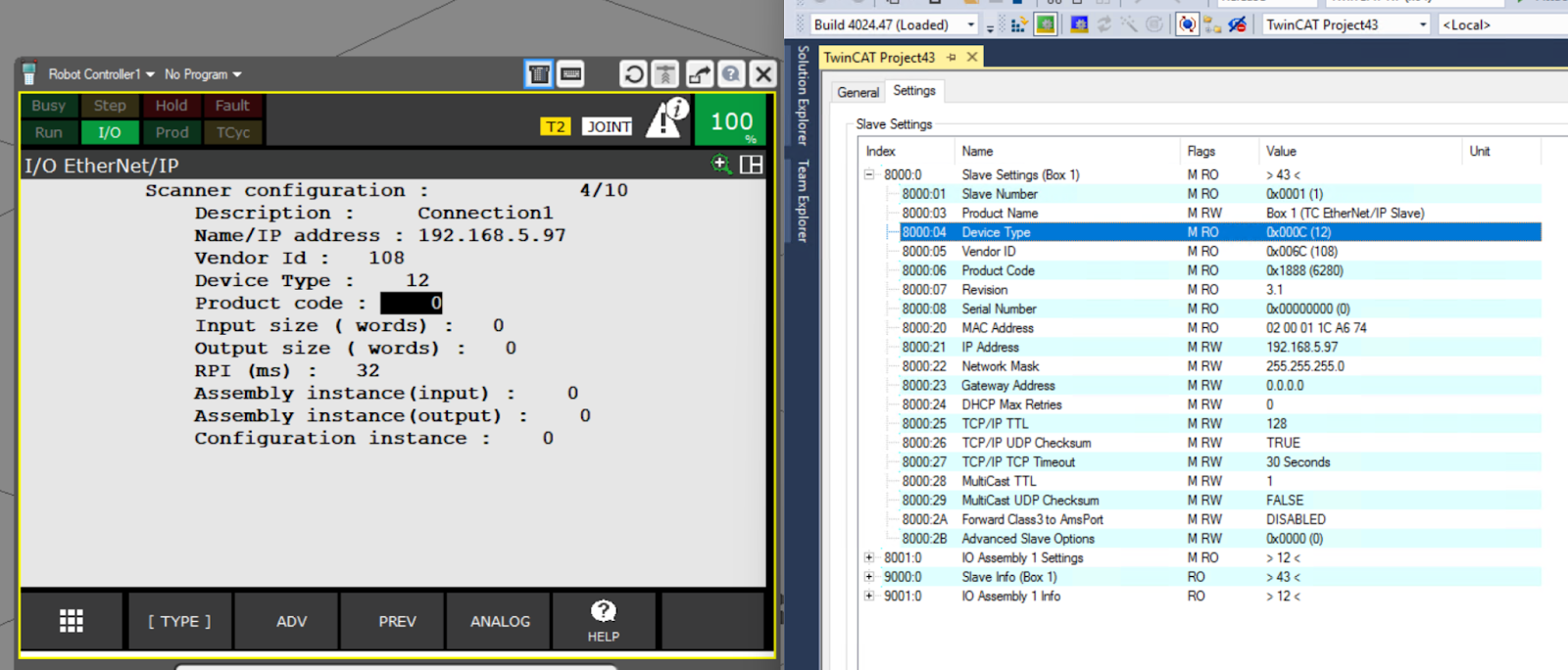
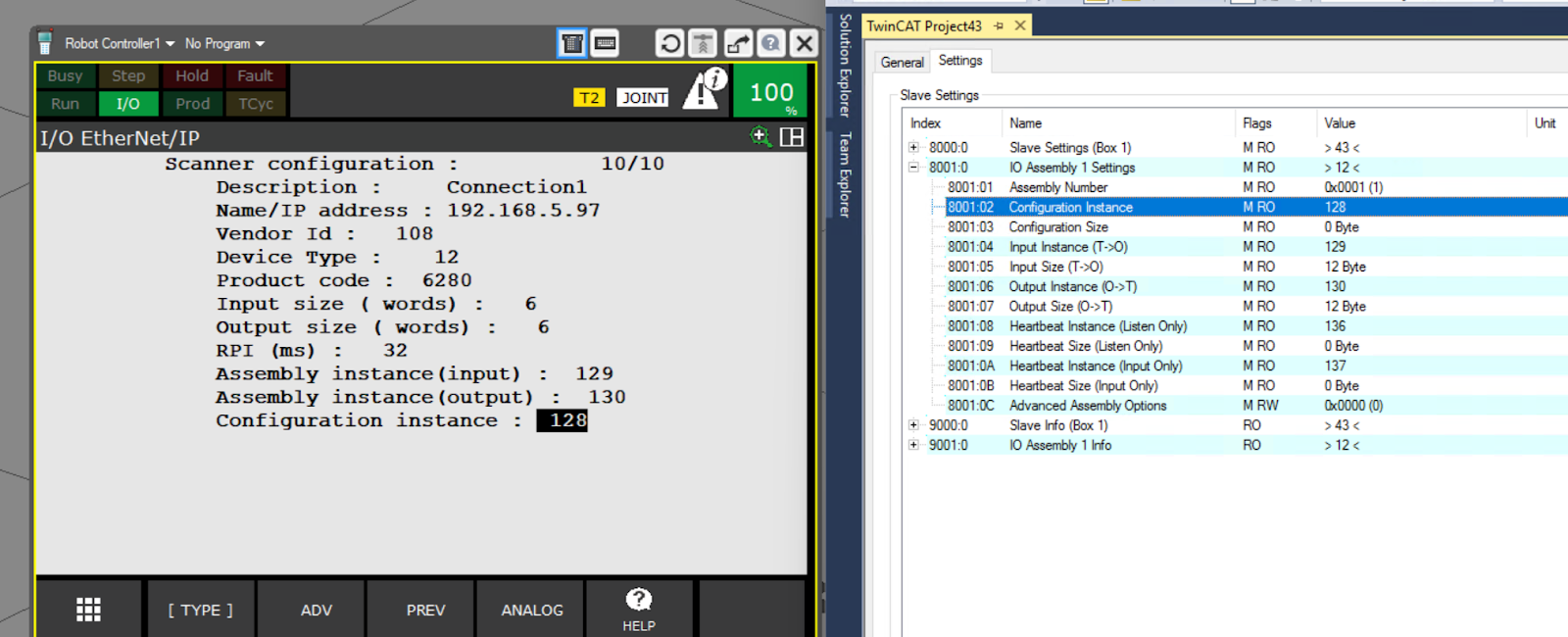
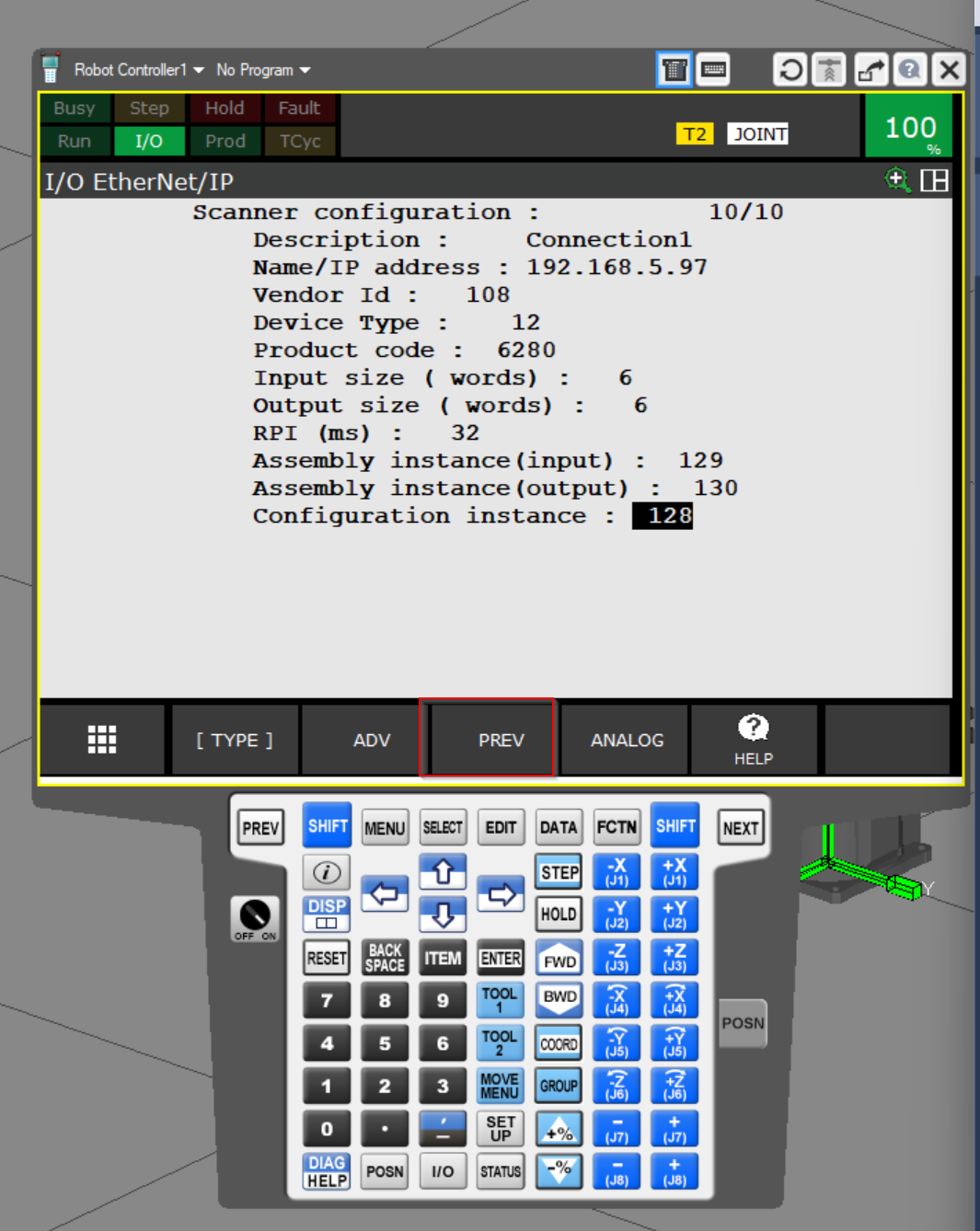
Scanner Configurationの設定画面になります。名称は少々ややこしいですが、こちらの画面ではROBOGUIDEに立ち上げたScannerと接続するEthernet/IP Adapterを設定する画面です。
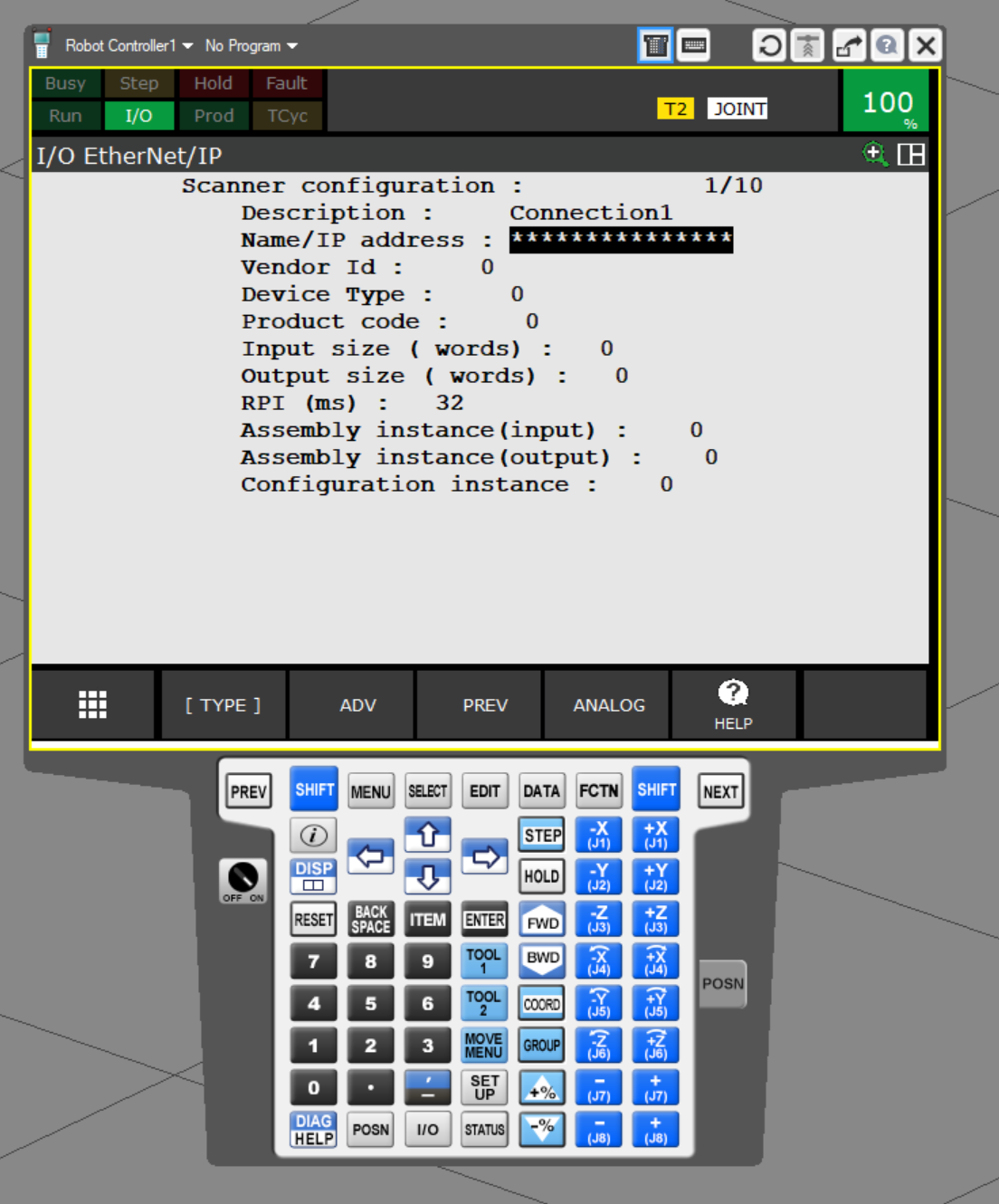
Name/IP address
Name/IP addressはEthernet/IP AdapterのIPアドレス設定項目で、TwinCATの8000.21に該当します。
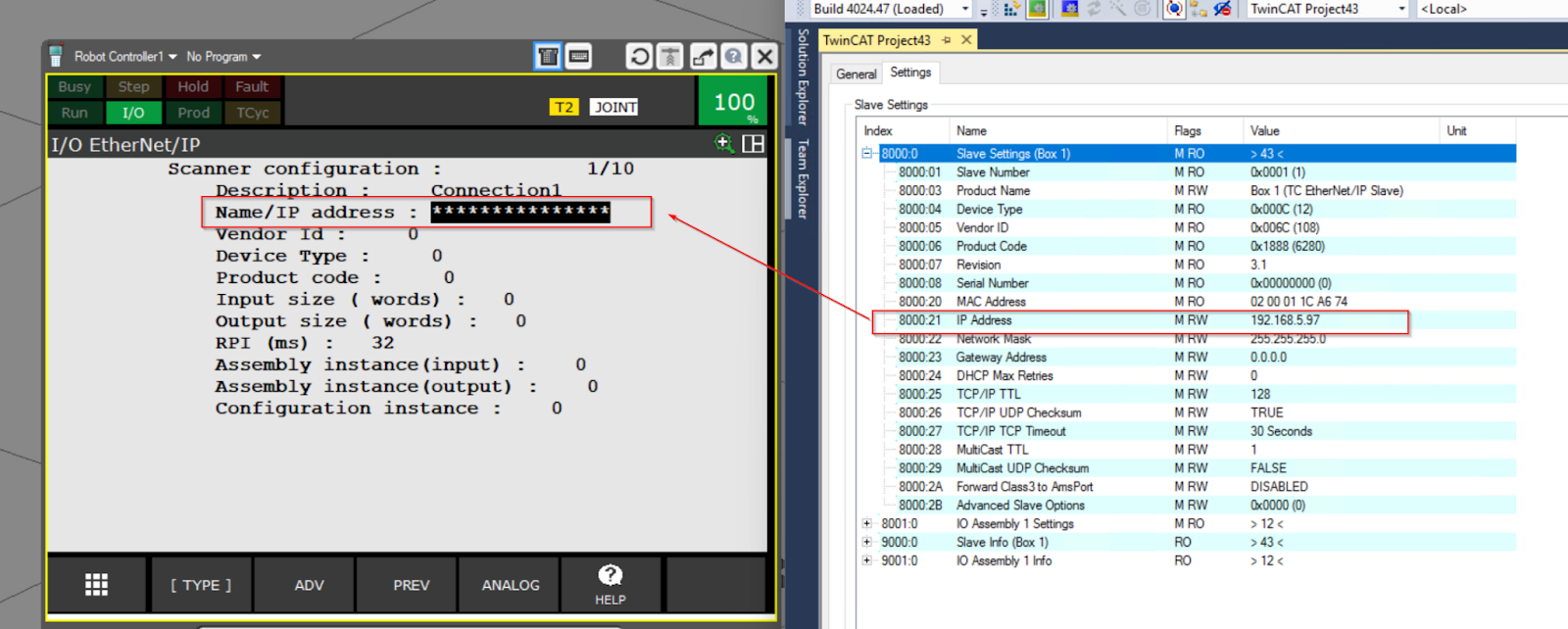
Done!
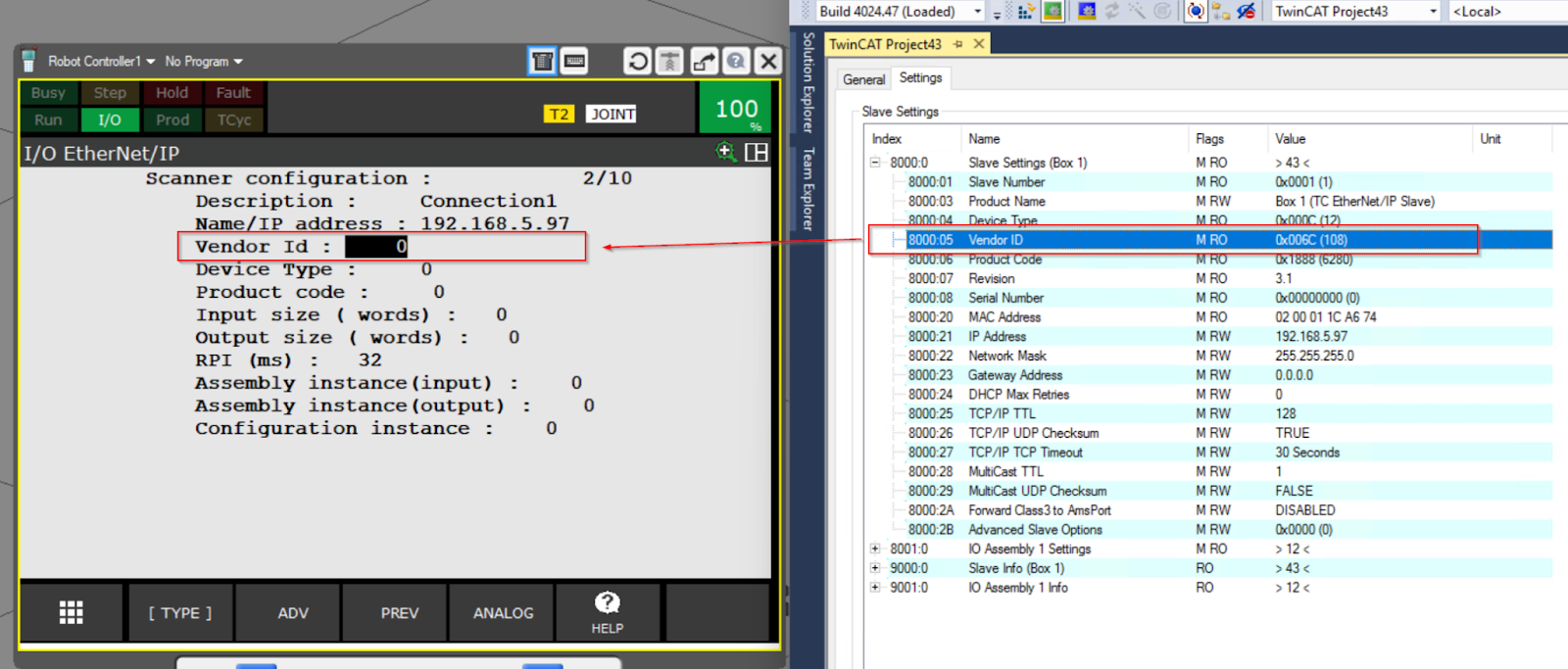
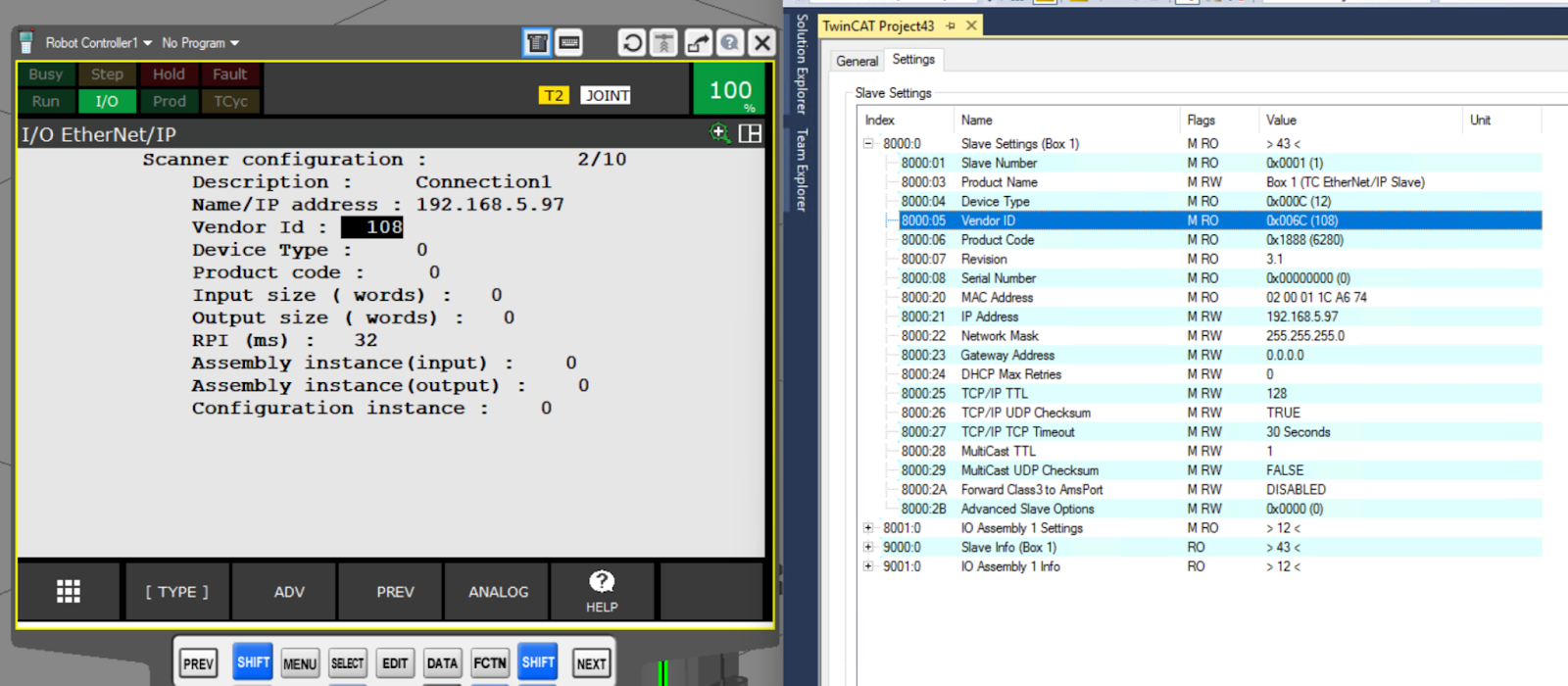
Vendor Id
Vendor IdはEthernet/IP AdapterのVendor Id設定項目で、TwinCATの8000.05に該当します。
Done!
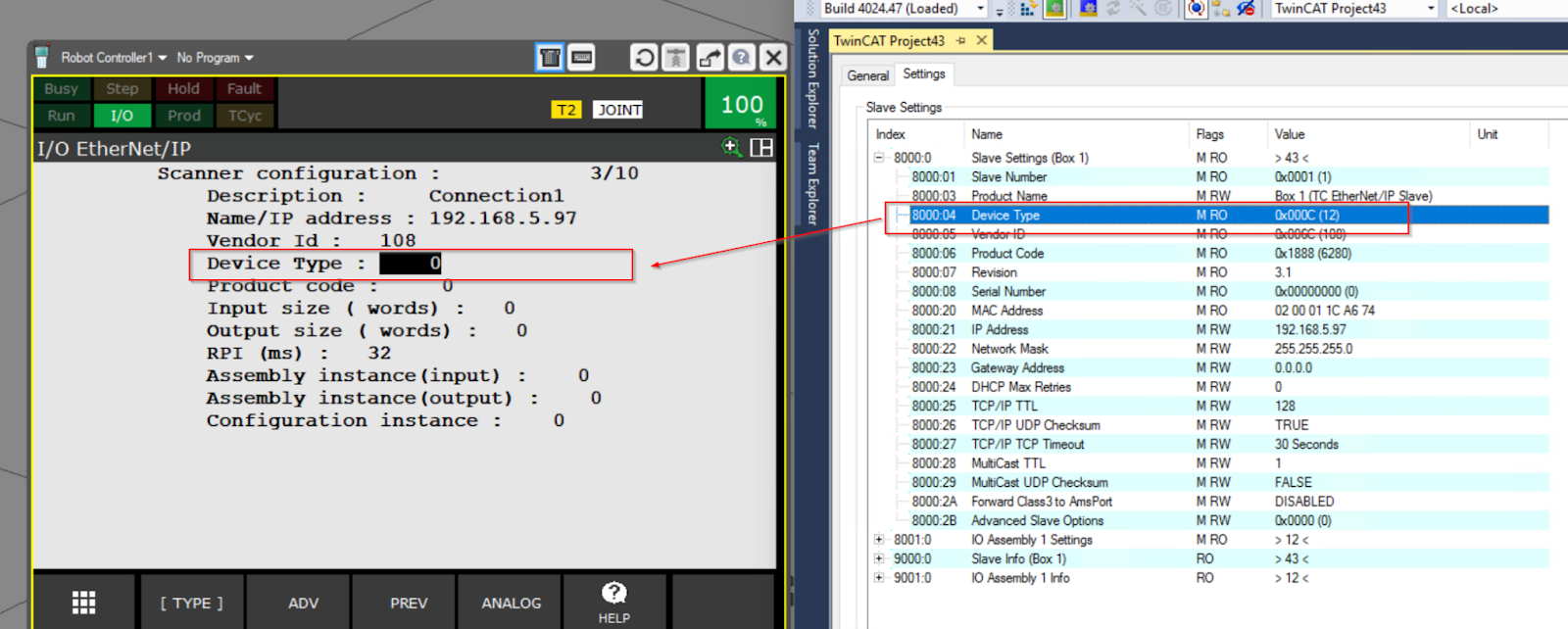
Device Type
Device TypeはEthernet/IP AdapterのDevice Type設定項目で、TwinCATの8000.04に該当します。
Done!
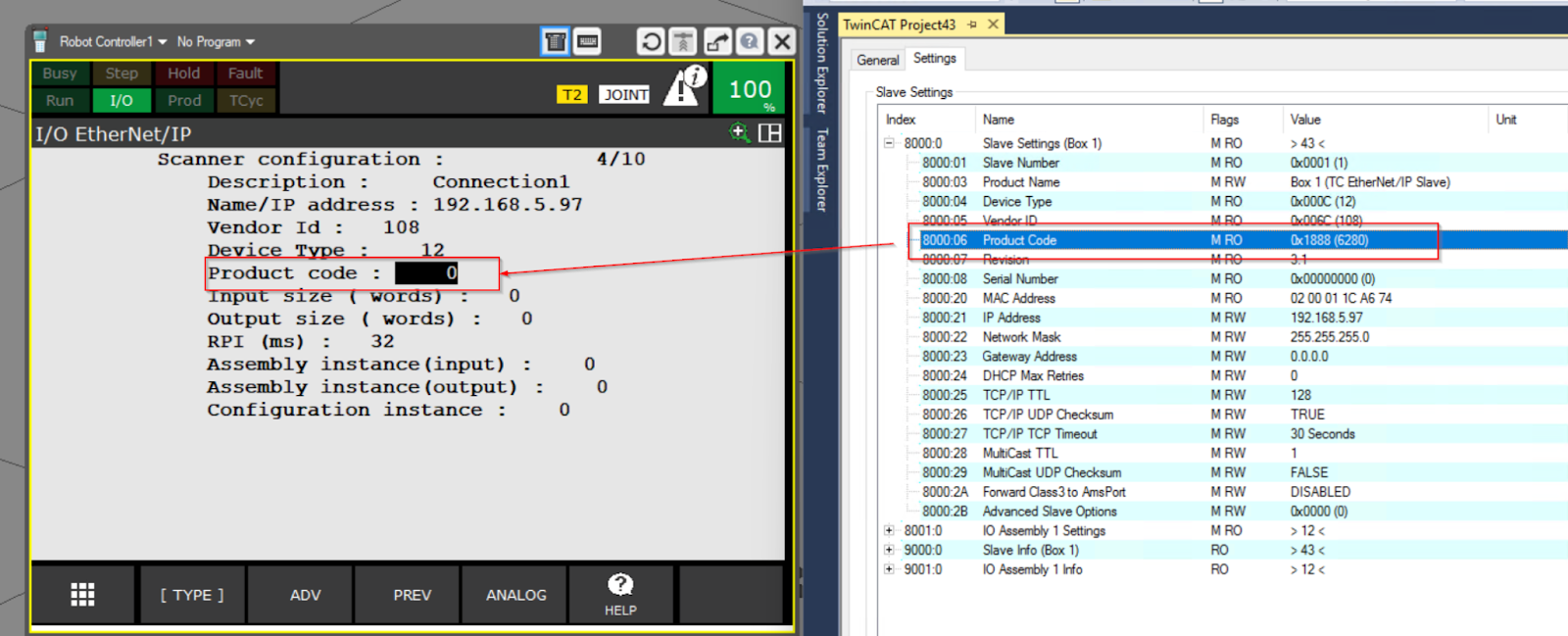
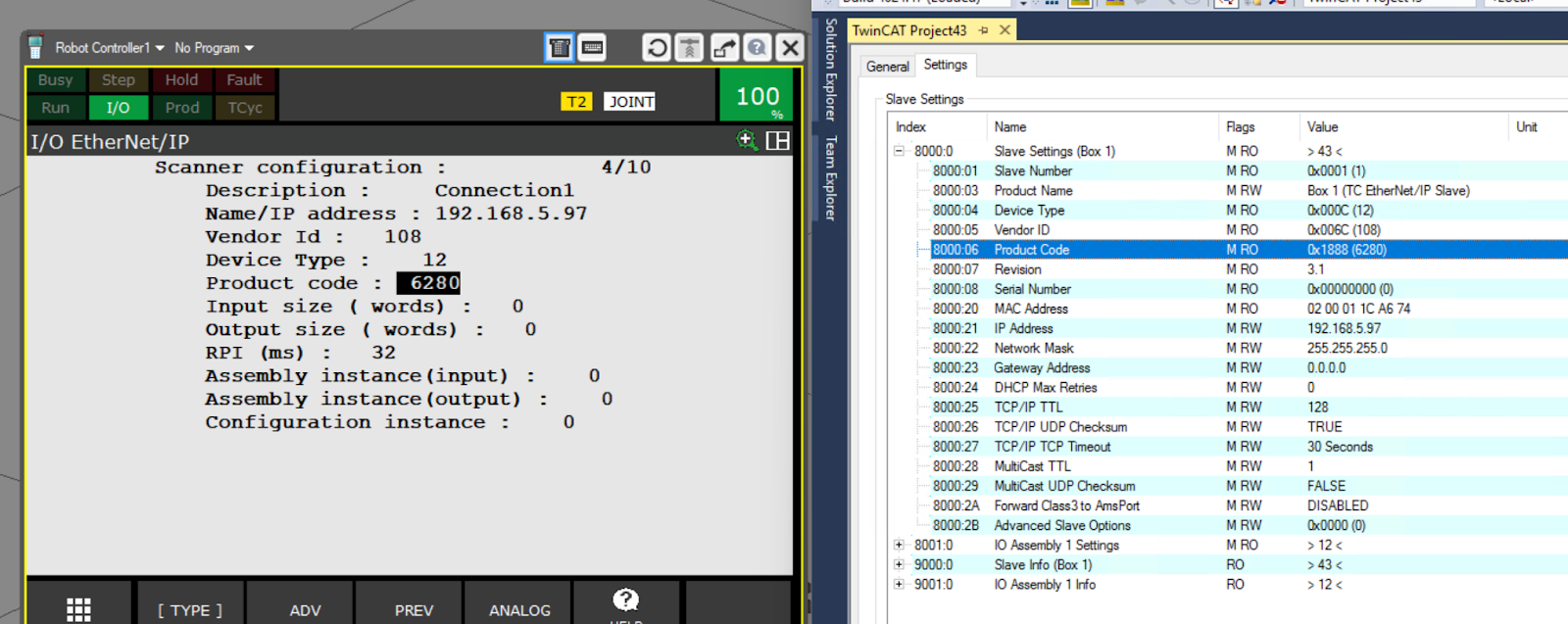
Product Code
Product CodeはEthernet/IP AdapterのProduct Code設定項目で、TwinCATの8000.06に該当します。
Done!
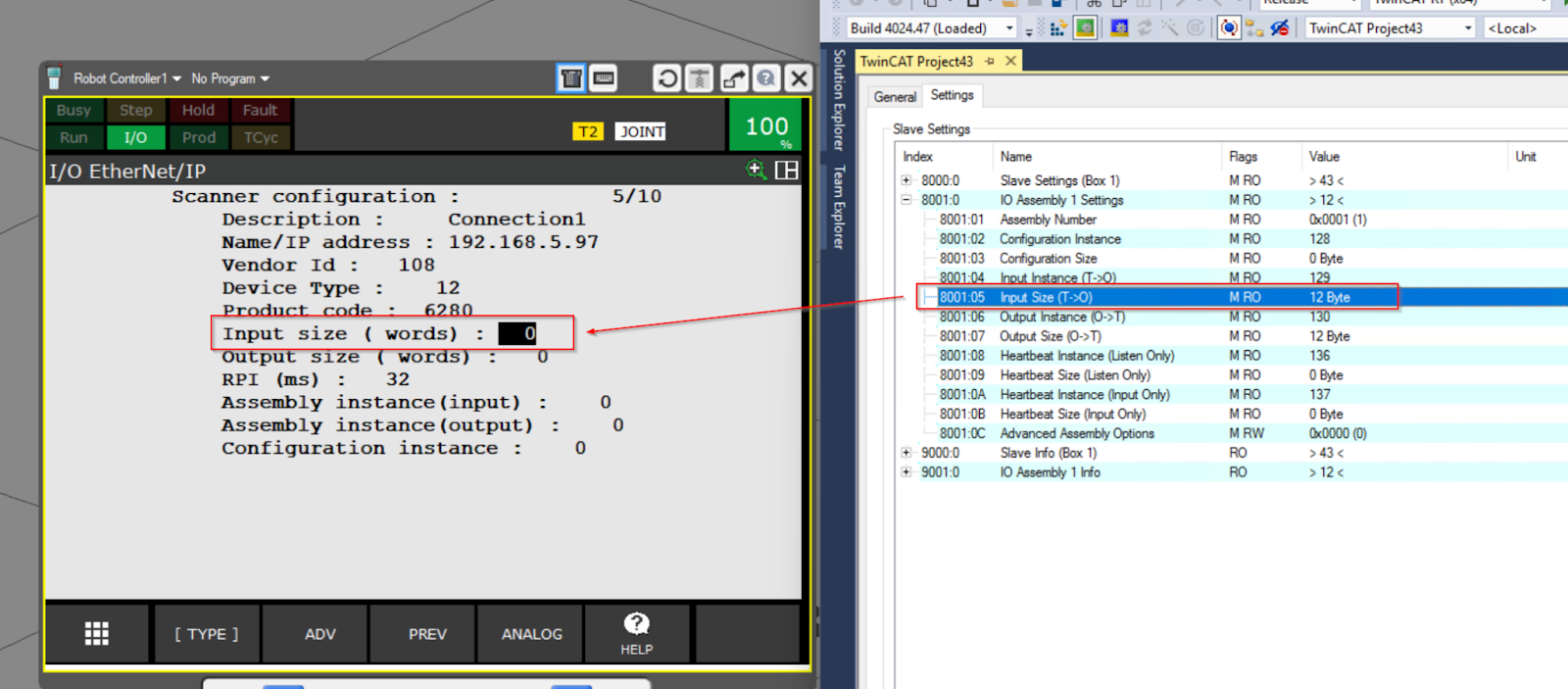
Input size(words)
Input size(words)はEthernet/IP Adapterの入力データサイズ設定項目で、TwinCATの8001.05に該当します。
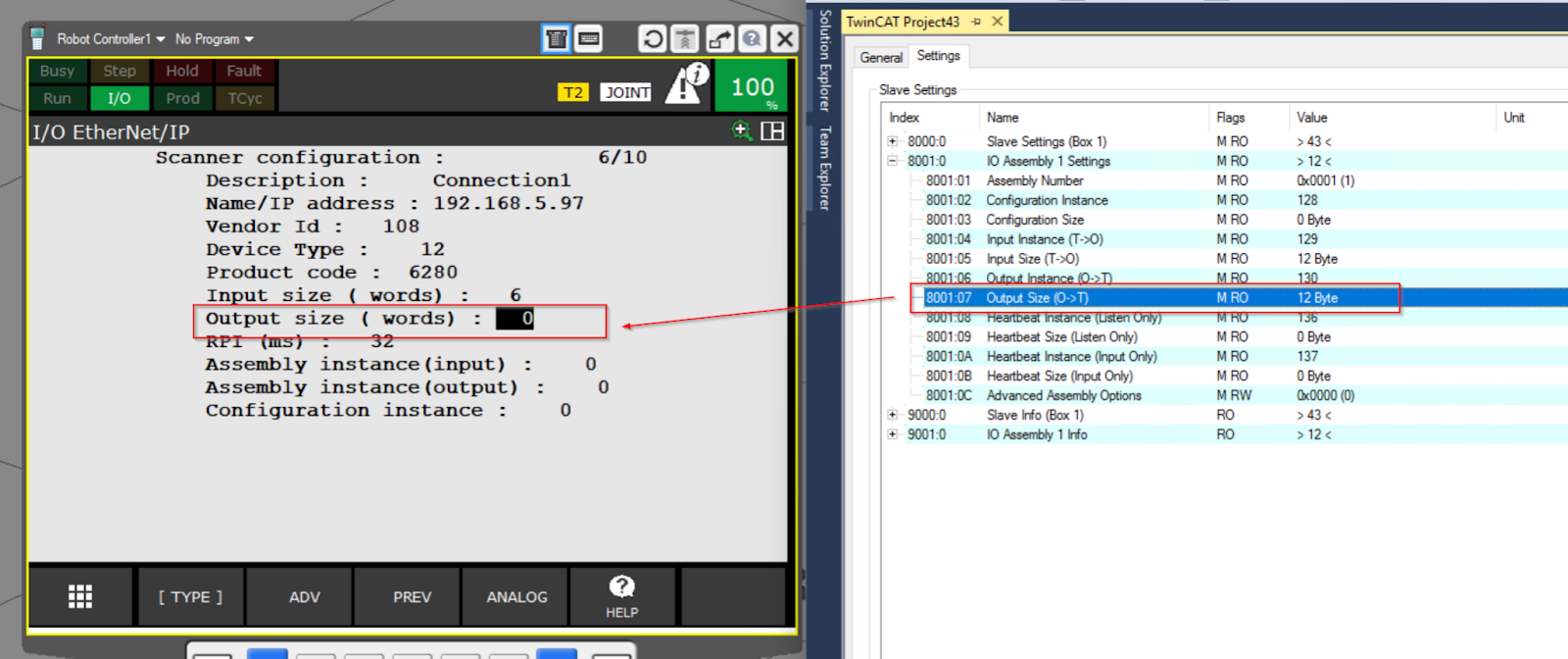
Output size(words)
Output size(words)はEthernet/IP Adapterの出力データサイズ設定項目で、TwinCATの8001.07に該当します。
RPI(ms)
RPI(ms)はEthernet/IP Adapterとデータ交換の更新周期で、TwinCATのEthernet/IP AdapterのSync Taskで設定されたCycle ticksより大きく設定してください。
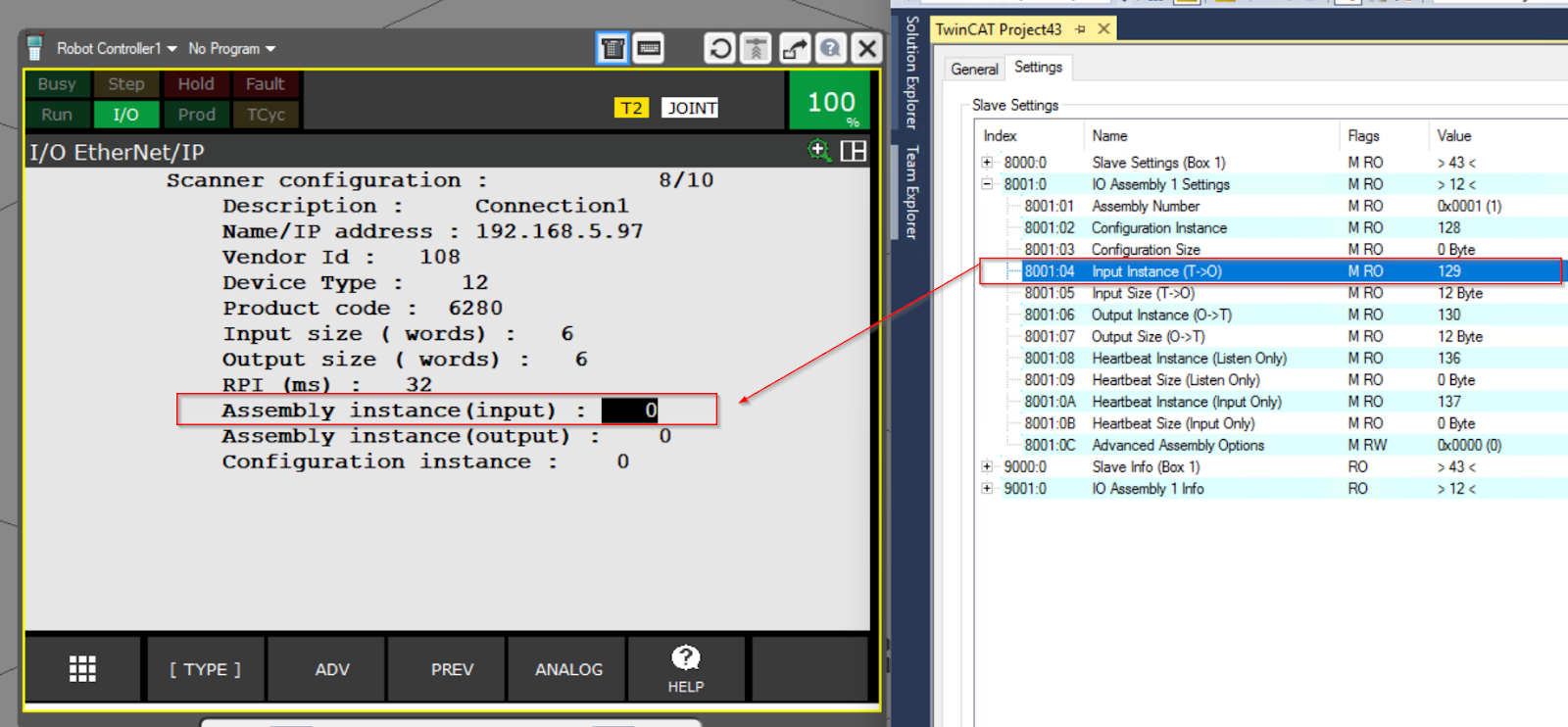
Assembly instance(input)
Assembly instance(input)はEthernet/IP Adapterの入力データInstance番号設定項目で、TwinCATの8001.04に該当します。
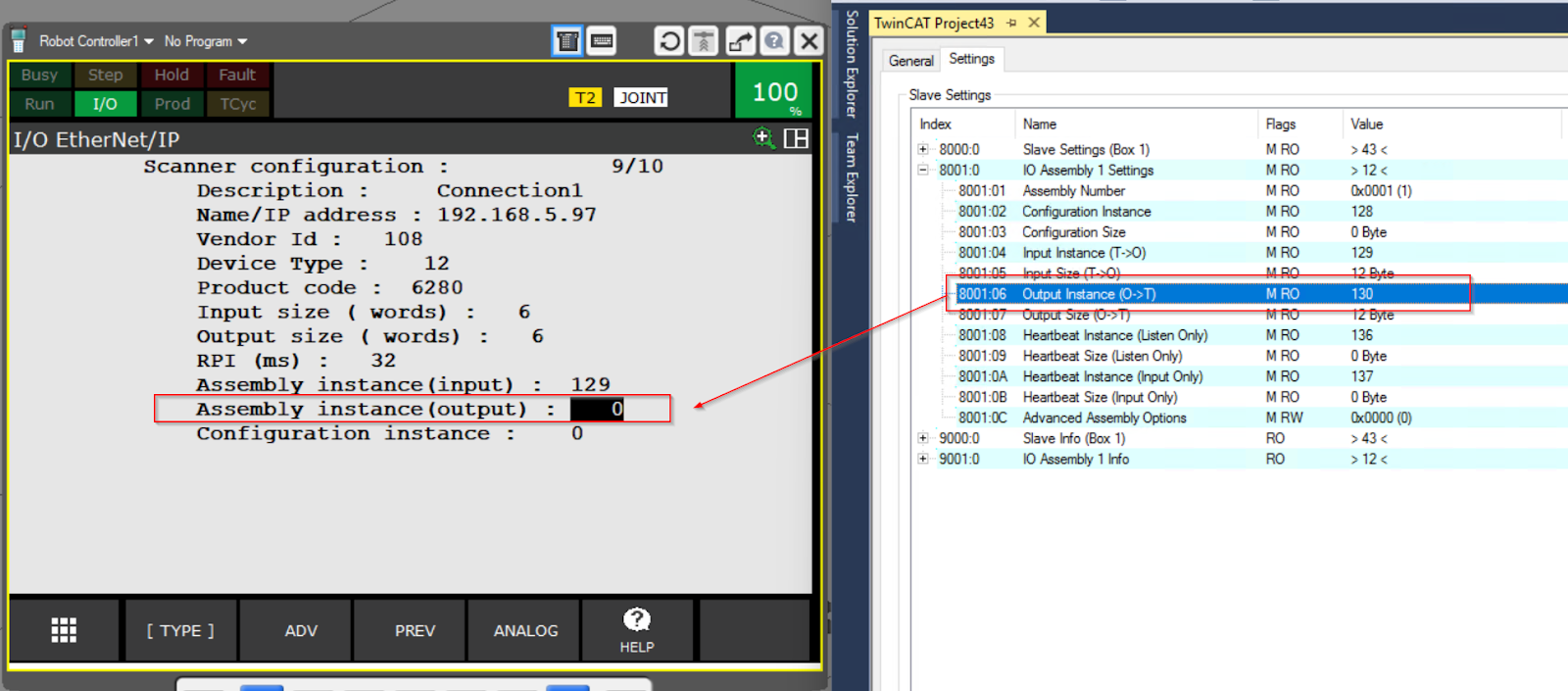
Assembly instance(output)
Assembly instance(output)はEthernet/IP Adapterの出力データInstance番号設定項目で、TwinCATの8001.06に該当します。
Configuration instance
Configuration instanceはEthernet/IP AdapterのConfigurationデータInstance番号設定項目で、TwinCATの8001.02に該当します。
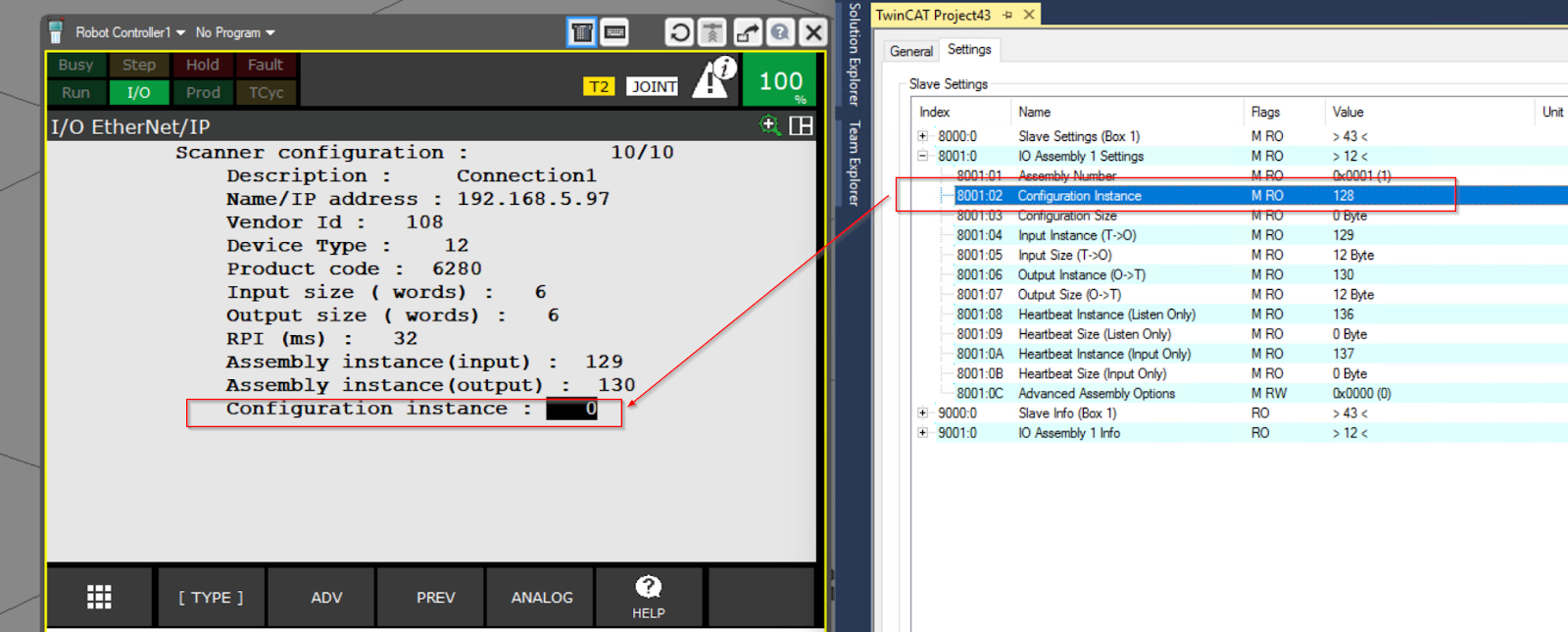
Done!
Result
これで設定Okです。
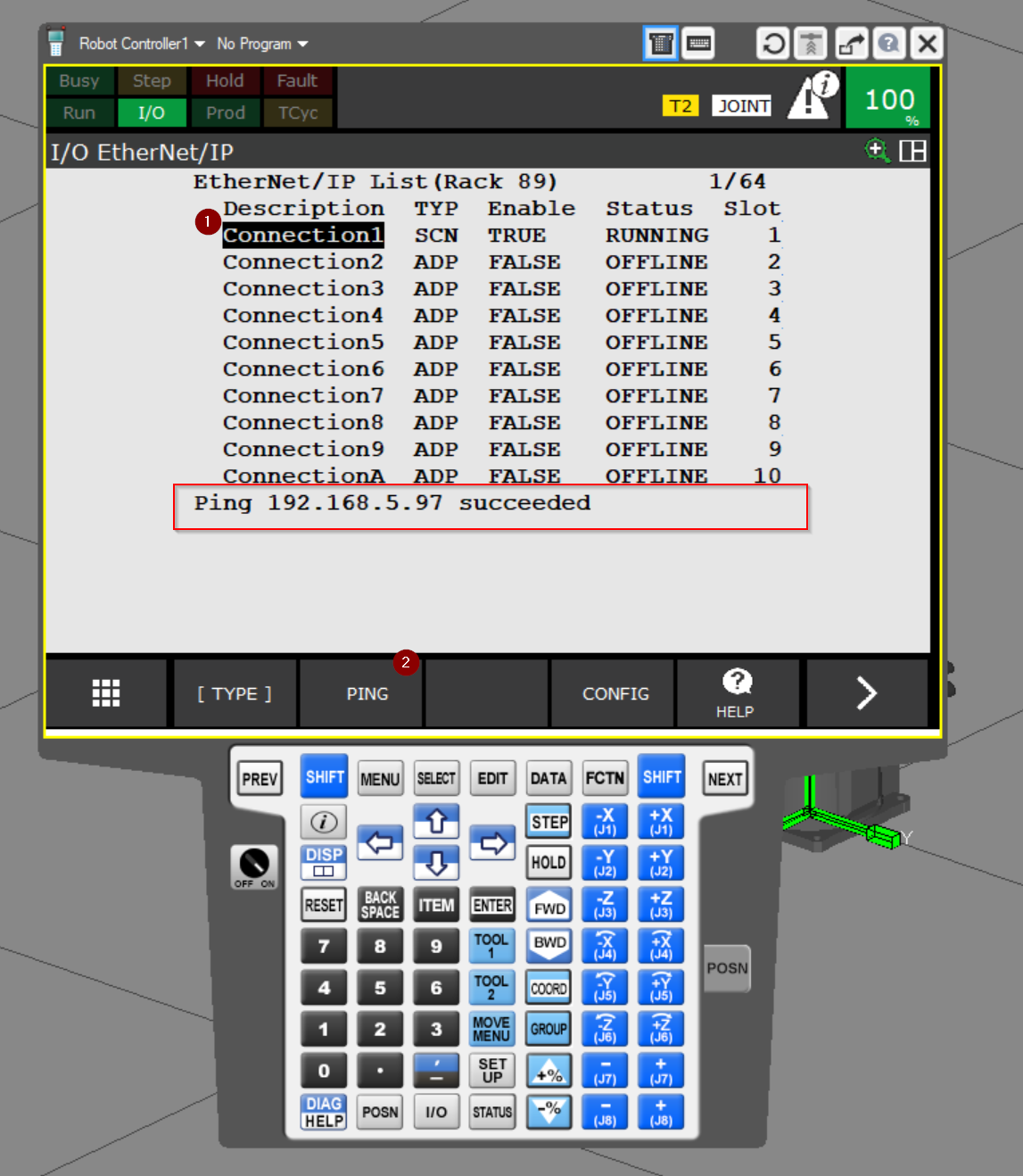
PING
Beckhoff TwinCATのEthernet/IP AdapterとROBOGUIDEの通信を確認するため、Connection1を選び>PINGをクリックします。SucceededのメッセージがあればOkです。
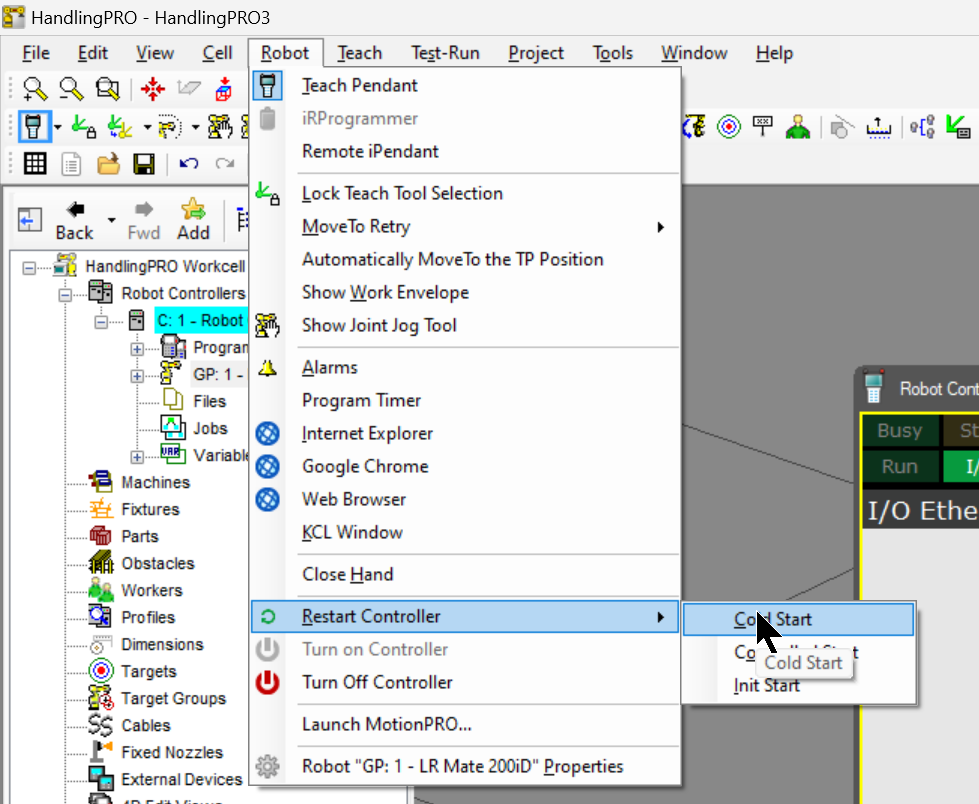
Reset the Controller
Ethernet/IP Adapterの接続設定が完了したら、Robot>Restart Controller>Cold Startで一回ロボットControllerをリセットしましょう。
Enable Scanner
Ethernet/IPをEnableするため、Connection1にあるEnable設定を選び>Trueにします。
Enable Remote Operation
次はRobot Controllerのリモート制御Optionsを有効にする必要があり、0 ‐‐NEXT — をクリックします。
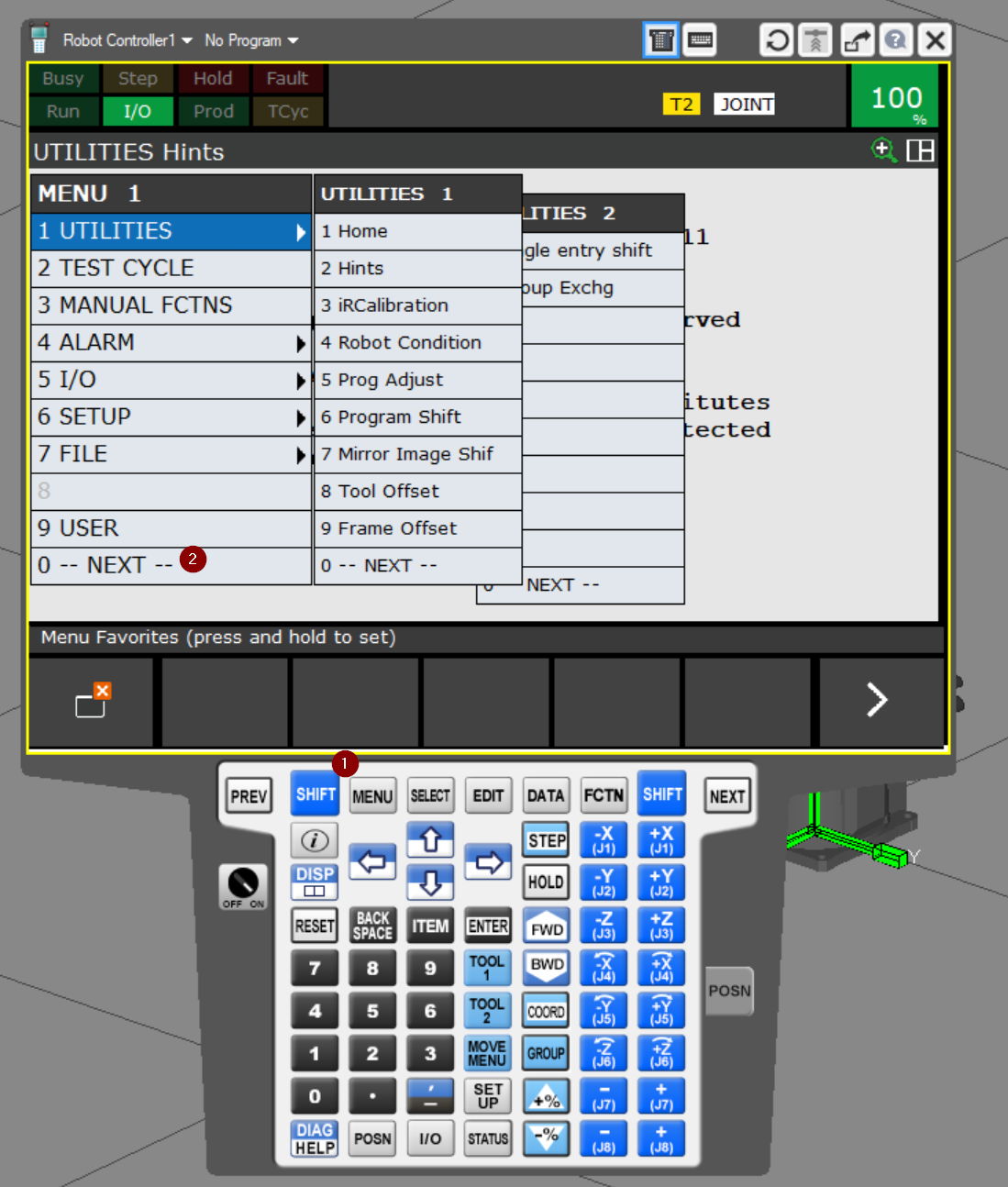
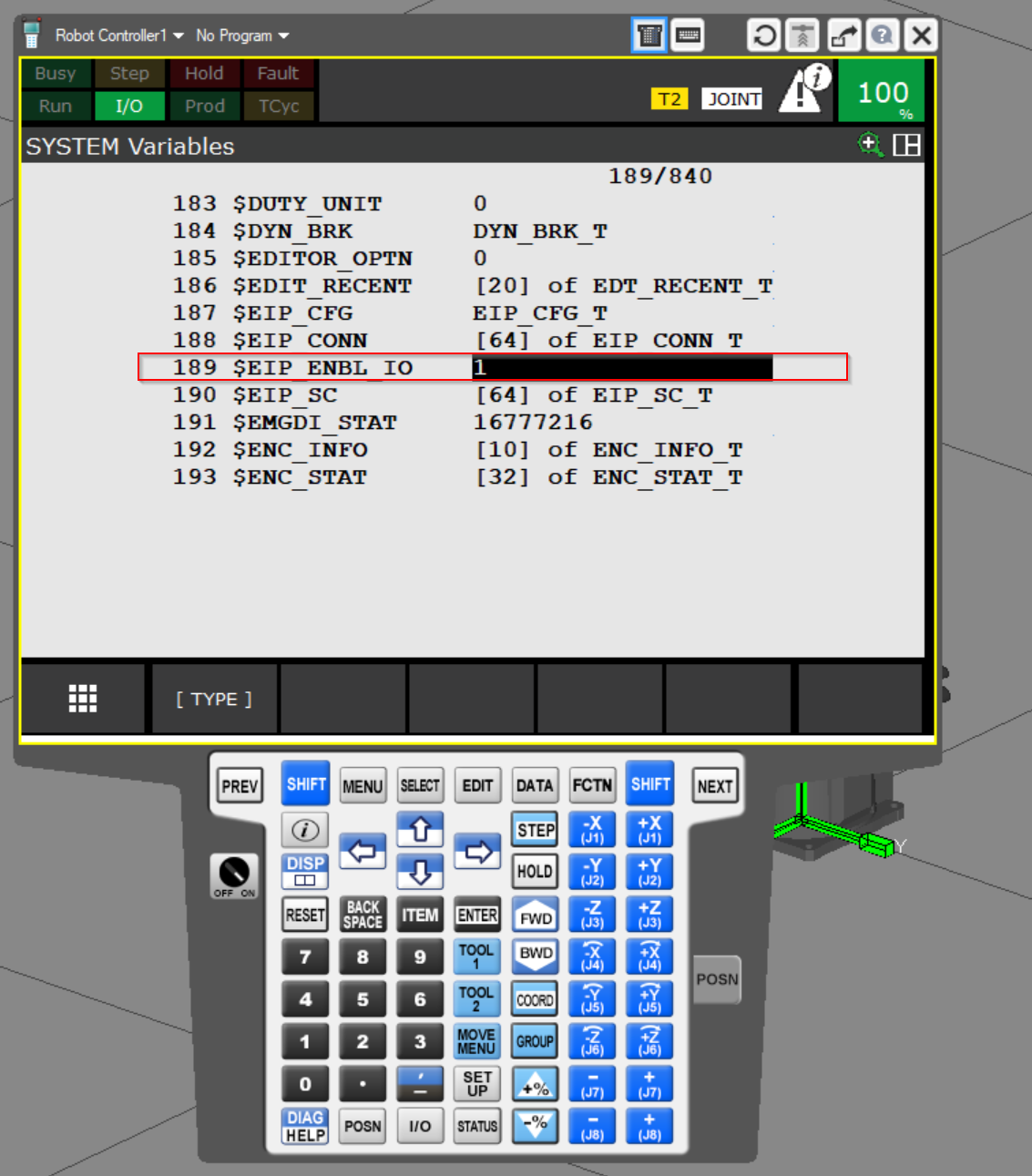
MENU2>6 SYSTEM>2 Variablesを開きます。
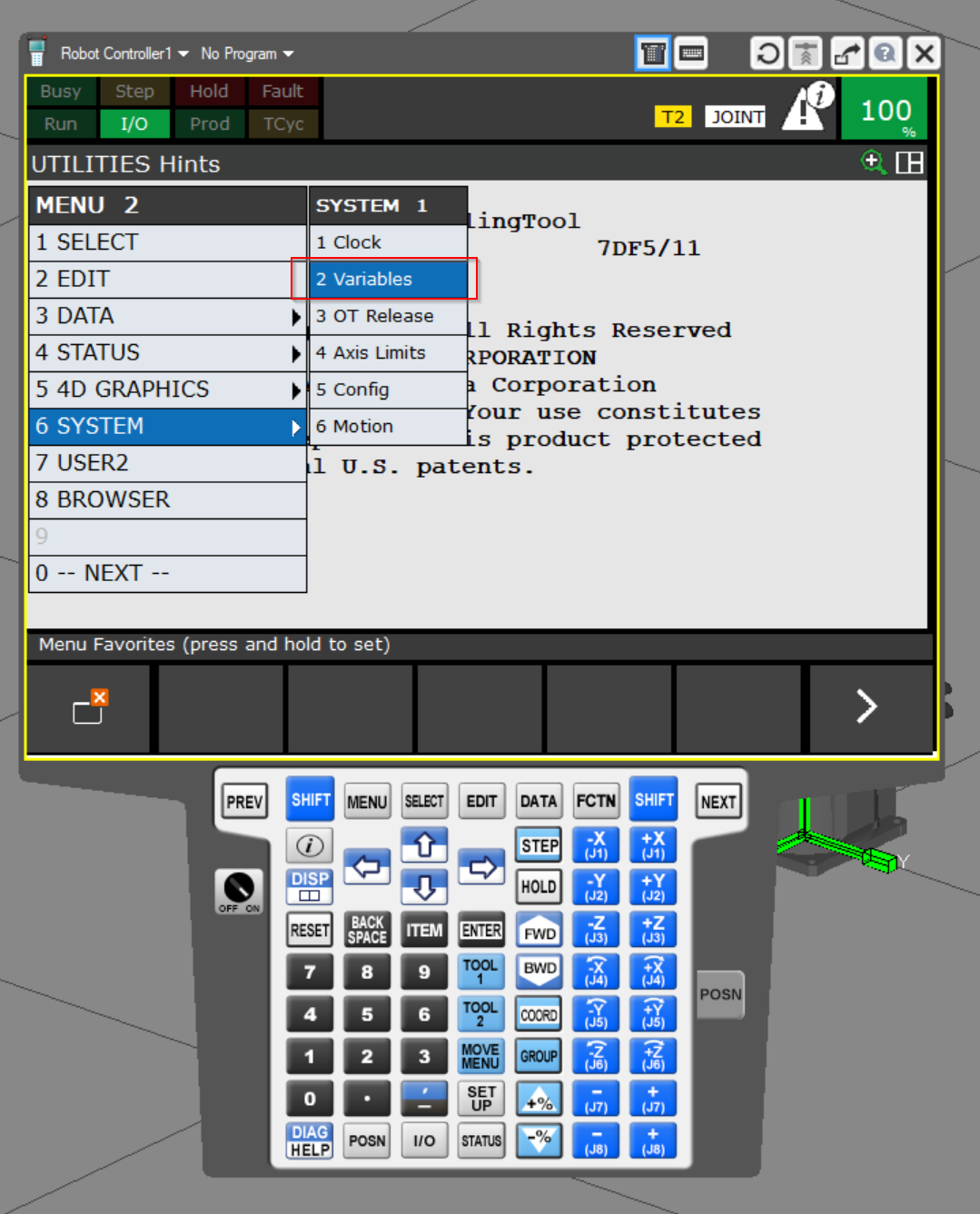
189 $EIP_ENBL_IOを1に設定します。
Result
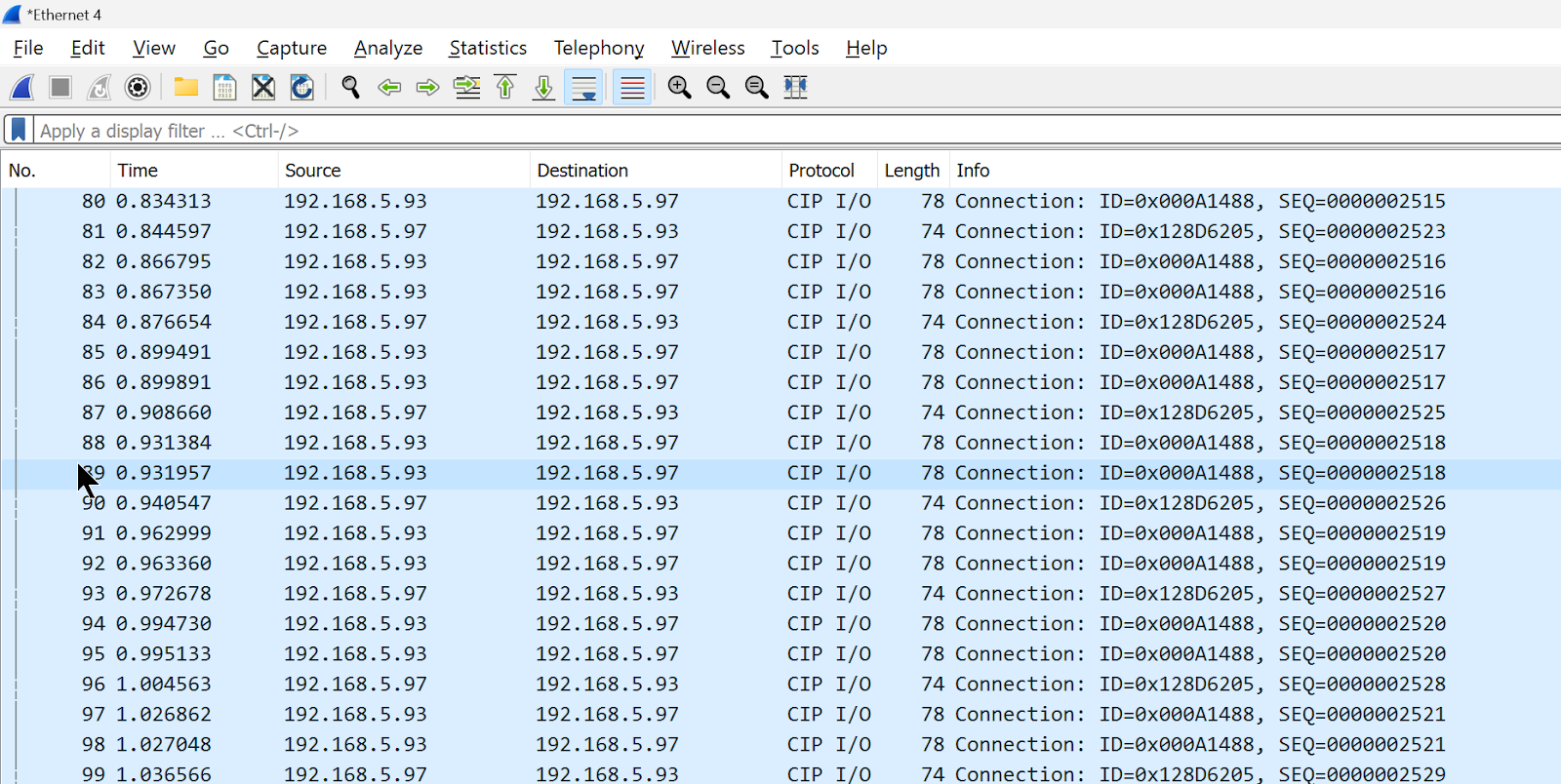
WiresharkからROBOGUIDEとTwinCATのCIP I/OのPacketがありましたね!それで通信が確立されました。
Implementation2
次はFANUC ROBOGUIDE側からIO データを確認していきます。
FANUC Side
Configure IO
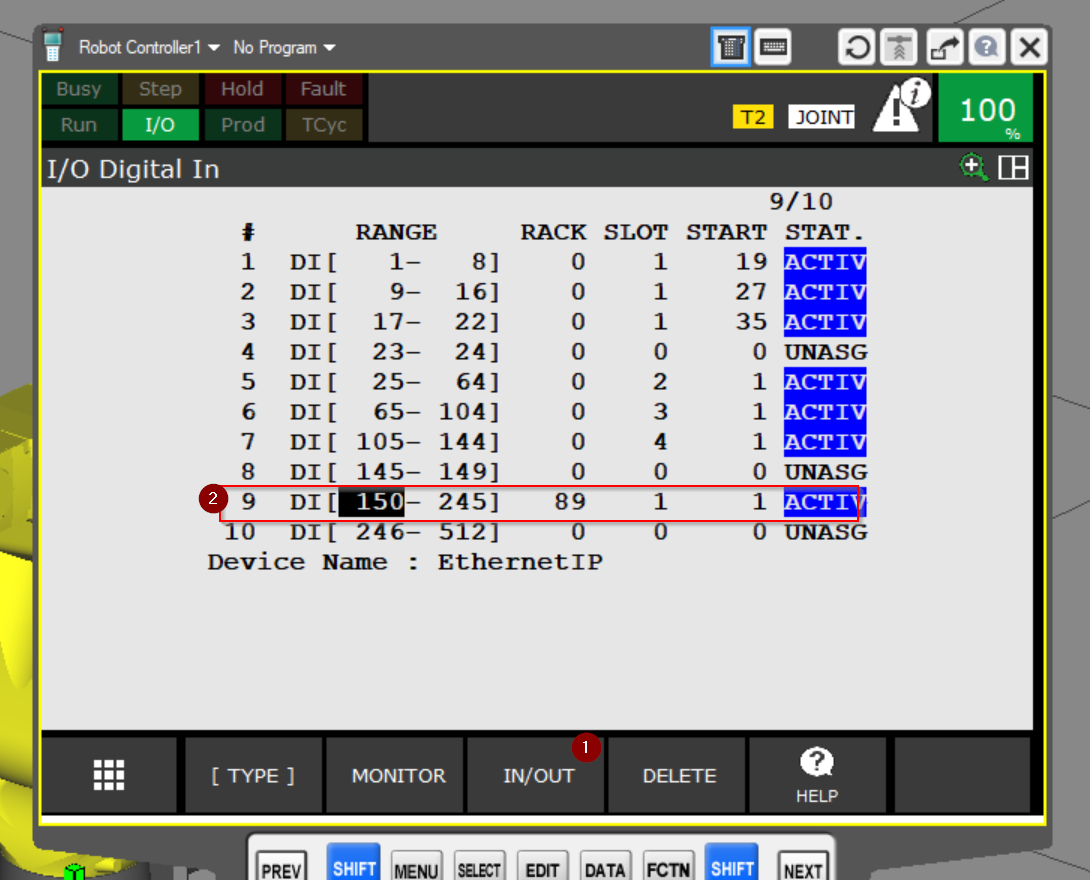
IO Configuration画面を開き、IN/OUTボタンをクリックします。
少しわかりづらいかもしれませんが、まずRACK89はEthernet/IPの通信RACKで、SLOT1はConnection1のことを示しています。そしてSTART=1は0Bit目からのデータを取り、DI番号150から245までに転送します。
150から245までは丁度6Wordsで、Beckhoff TwinCAT Etherent/IP通信のデータサイズに該当します。
DOにも同じのように設定しましょう。
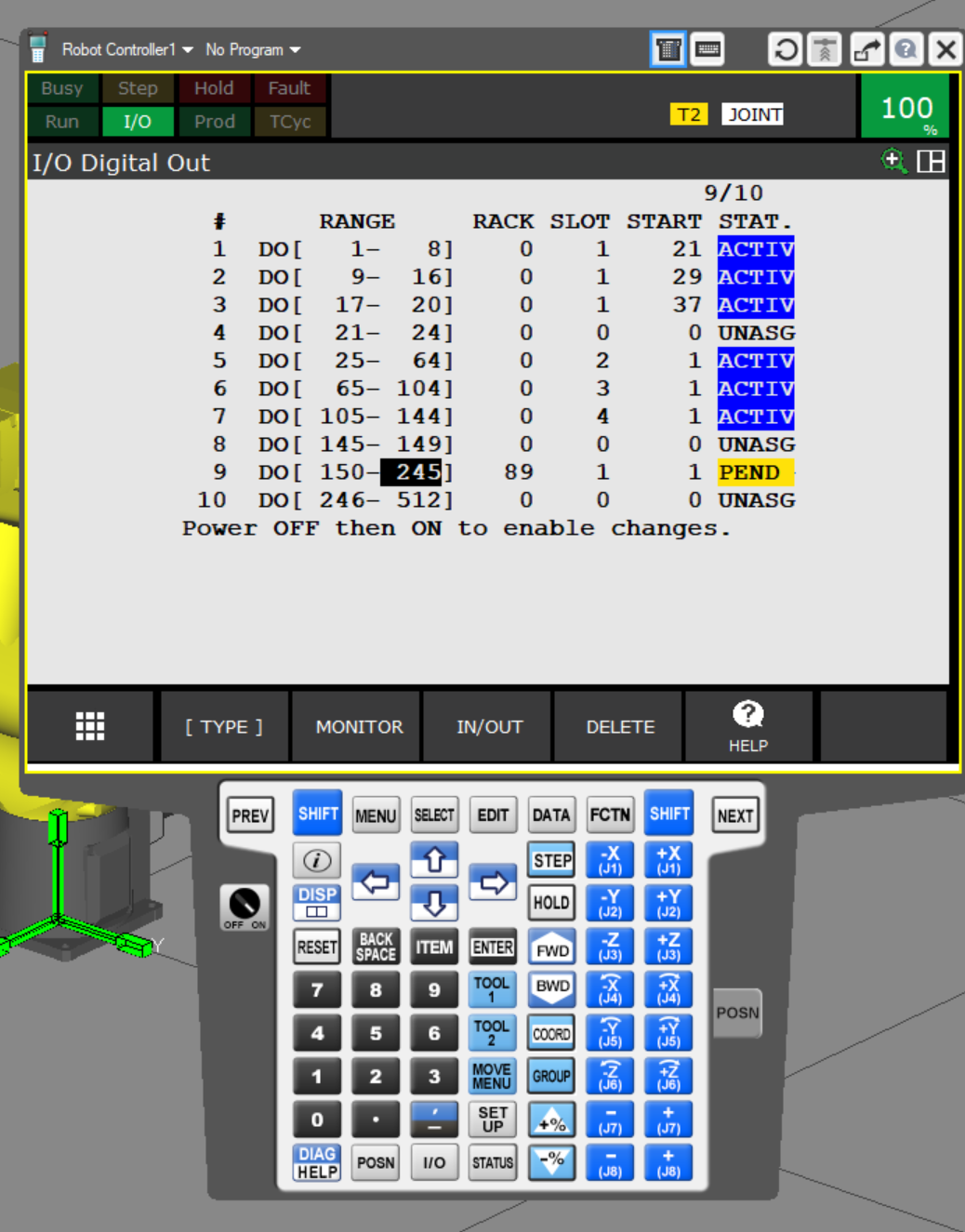
こちらは実査いI/O Digital 画面とI/O Ethernet/Ip 画面の設定関係です。

Result
ではDIデータを確認するため、DIを選び>MONITORをクリックします。
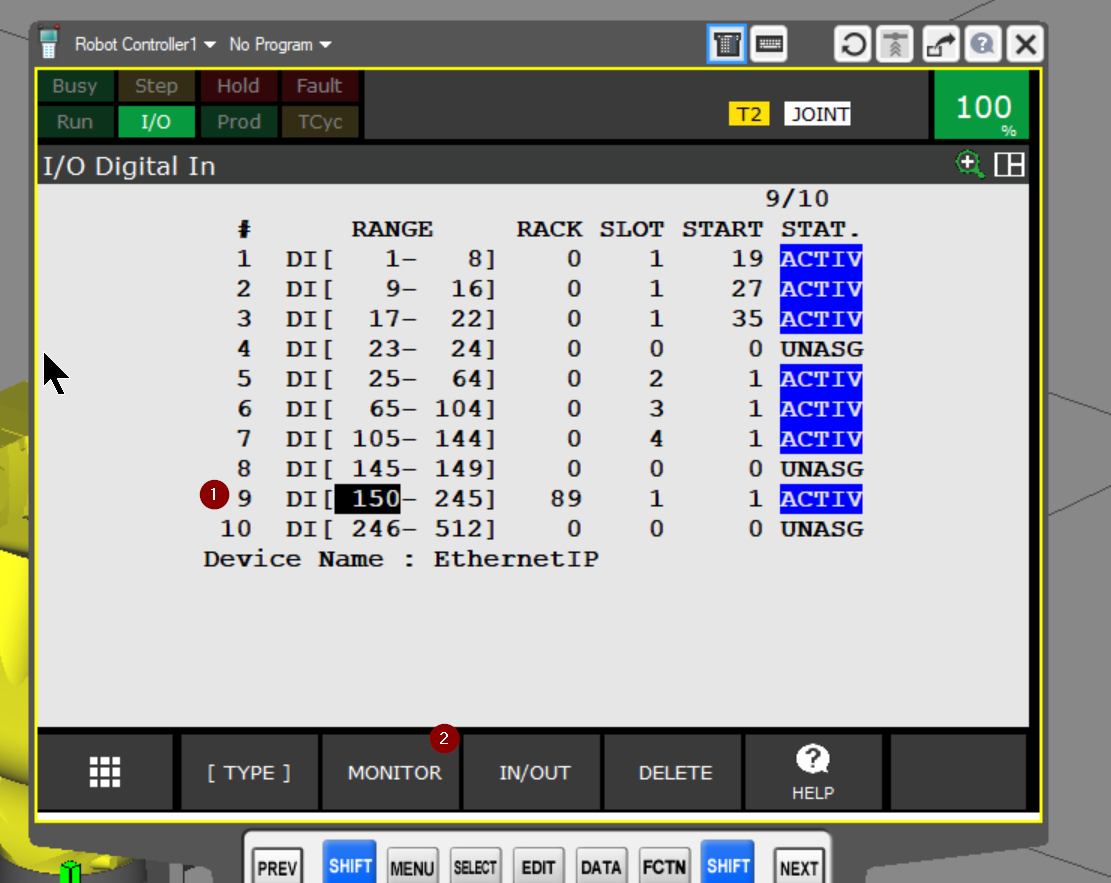
DI[150]から各入力の状態を確認できます。SIM=Uはシミュレーションしてない状態でもあり、STATUS=OFFは該当するDI番号は現在OFFしています。

DO Word1
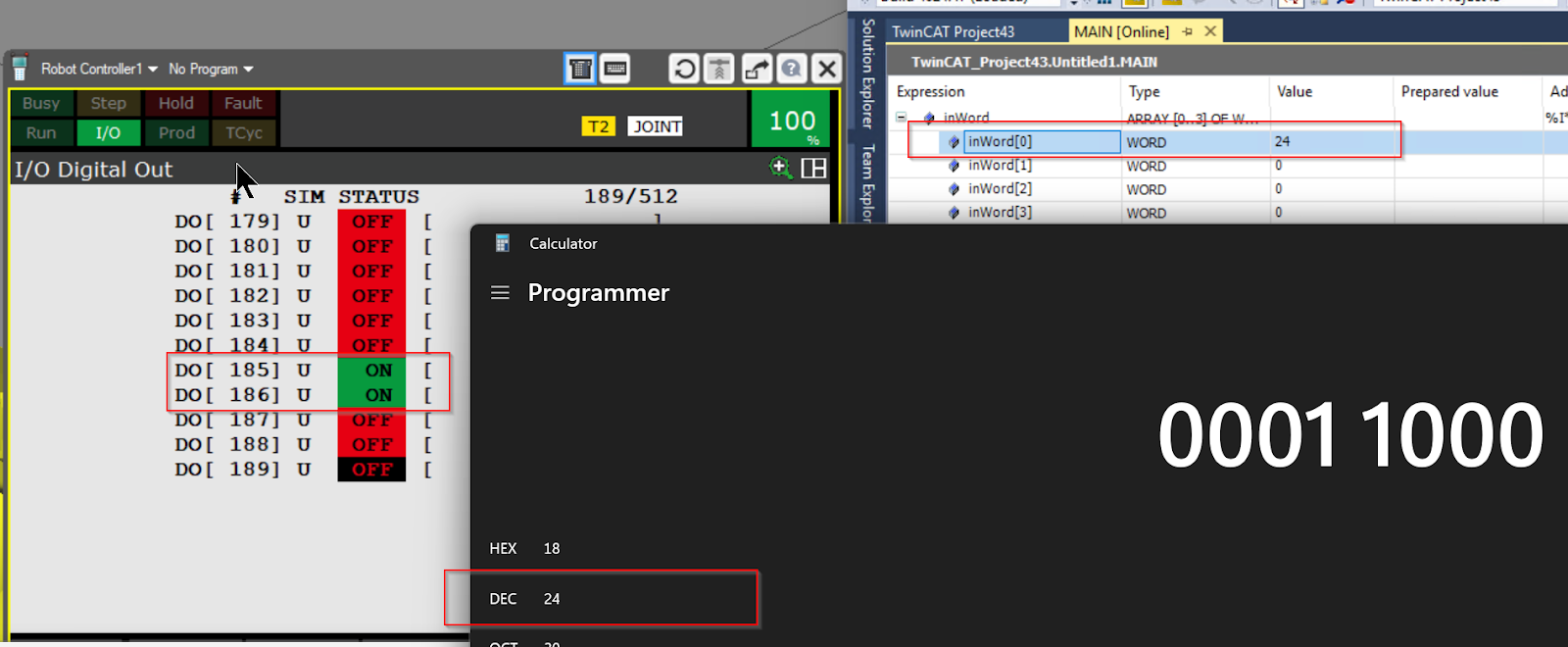
FANUC側からDO185,DO186をONにするためDOを選び>ONにクリックします。

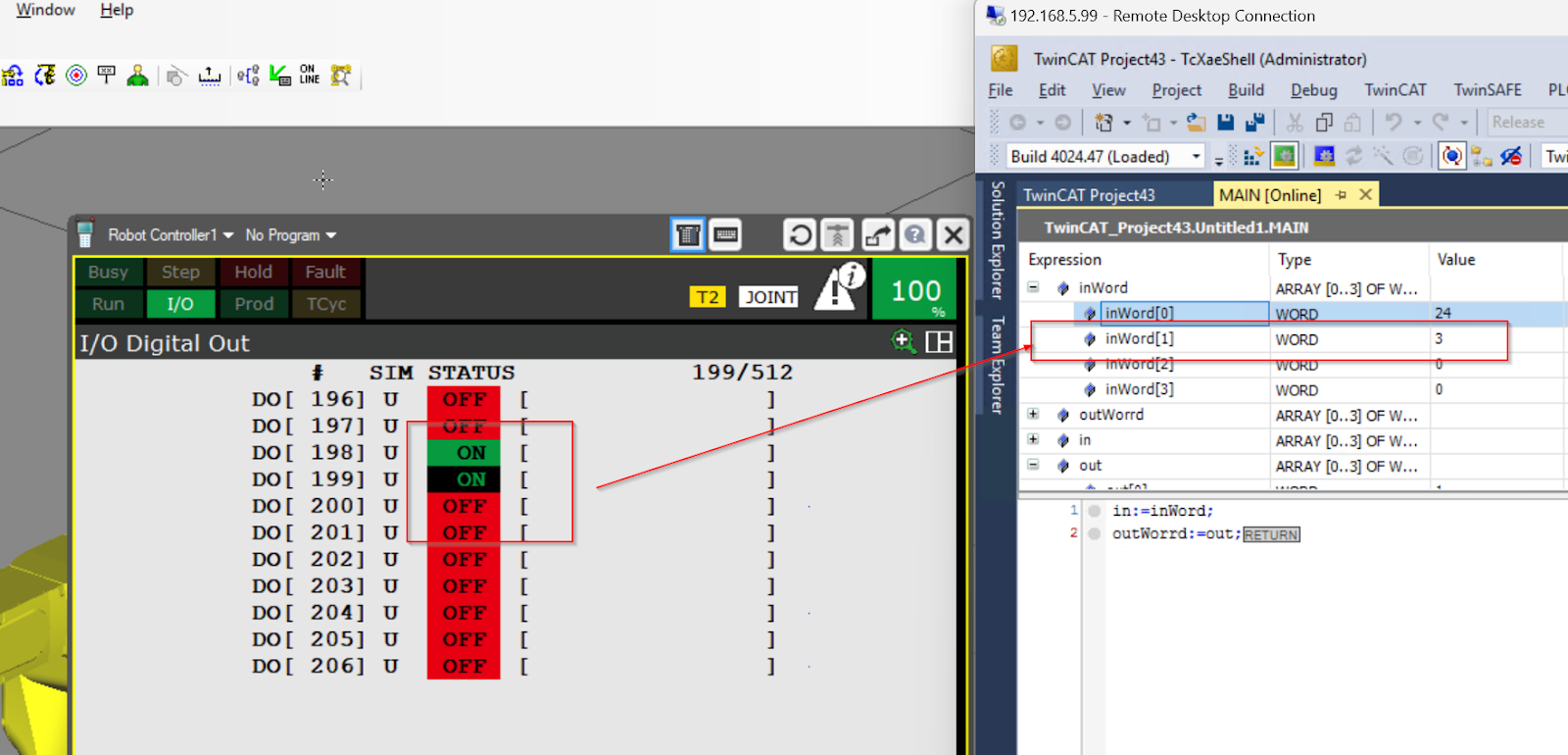
DO185/DO185がTrueになり、DEC=24です。なので、TwinCAT側の1つ目のWordは24になります。
DO Word2
DO198/DO199がTrueになり、DEC=3です。なので、TwinCAT側の2つ目のWordは3になります。