
Keyence#SR750とBeckhoff TwinCAT3をEtherent/IPで繋がってみよう
こちらはキーエンスの新しいシリーズ、小型二次元コードリーダSR-750シリーズの記事です!今回はSR-750を使用するには必要な簡単セット...
こちらはキーエンスの新しいシリーズ、小型二次元コードリーダSR-750シリーズの記事です!今回はSR-750を使用するには必要な簡単セット...
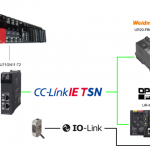
今回の記事では三菱IQ-RのRJ71GN11-T2を使用し、CC-Link IE TSN Masterを立ち上げ、CC-Link IE T...

新しいシリーズが始まりました!HOKUYOがIIFES2024で発表したAGV対応の国内メーカーSafety Controller HSC...

今回の記事ではEXORのハードウエアでDockerを使用する手順をメモします。 Docker with EXOR Panel...
この記事では三菱IQ-RのRD81OPC96モジュールを使用し、OPC UA Serverを立ち上げ、UaExpertとBeckhoff ...
今回の記事ではFANUC ロボットプログラムを呼び出すときに使うARパラメータの使い方について説明します。ARを使うことによりロボットプロ...

今回の記事ではBeckhoff TF6421を利用しPLCの変数をXML Fileにデータを書き込みます。さ、はじめよう! ...

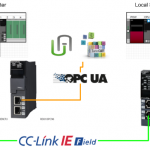
今回の記事ではCC-Link IE Fieldのネットワーク構築方法や基本知識を紹介します。Master側はR120ENCPUを使用し、L...
今回の記事ではBeckhoff TwinCATのTF6701を使用し、Azure Iot Hubに登録されたデバイスにデータを送信します。...

SL5700をDebug Modeに切り替えると、一時的に安全変数を強制的にON/OFFすることができます。Sysmac Studio の...