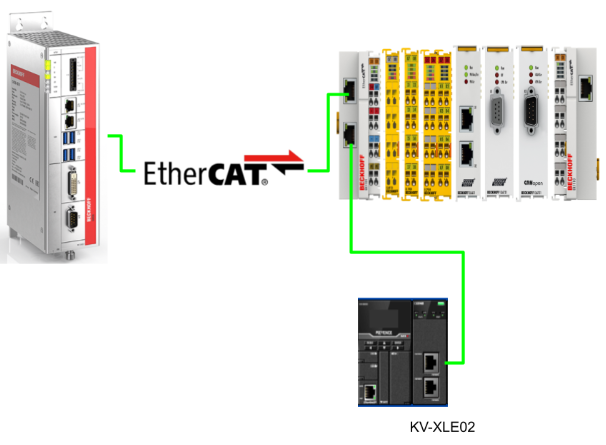
今回の記事ではBeckhoff TwinCAT3とキーエンスの通信Unit KV-XLE02でEtherCAT通信の構築方法を説明します。注意するのはKV-XLE02はEtherCAT Slaveとして稼働します。
さ、始めよう!
前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
現在、私達の活動はほぼ無償で続けており、より多くのコンテンツを提供するためには、皆様の温かいご支援が大変重要です。もし可能であれば、以下のリンクから応援していただけると大変嬉しく思います。
高橋クリスのメンバーシップ
こちらはFullさん(full@桜 八重 (@fulhause) / X)と共にやっているラジオにメンバーシップを登録いただけます。
https://note.com/fulhause/membership/join
AMAZON ギフトリスト
こちらは自分のブログのコンテンツ制作や設備の充実に大いに役立てさせていただきます。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon
こちらは自分のブログのコンテンツ制作や設備の充実に対する小さな応援の気持ちのPatreonです。
https://www.patreon.com/user?u=84249391
皆様のサポートが、私たちの活動をより充実させる力となります。
どうぞよろしくお願いします。
メールアドレス(*=@)
X
EtherCAT?
EtherCATはドイツのBECKHOFF社によって開発されたイーサネットベースのリアルタイムフィールドバスです。Ethernetをベースとしているため、ネットワーク構築時には一般的なEthernetケーブルを使用することができます。
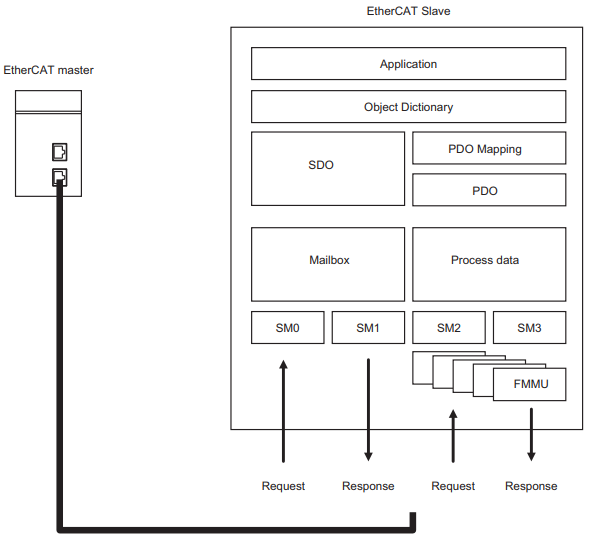
KV-XLE02はEtherCATスレーブとして動作し、Process Data object通信(サイクリックI/O)とMailbox通信によるデータ通信に対応しています。データのやり取りは、Sync Managerと呼ばれるポートを使用して行います。
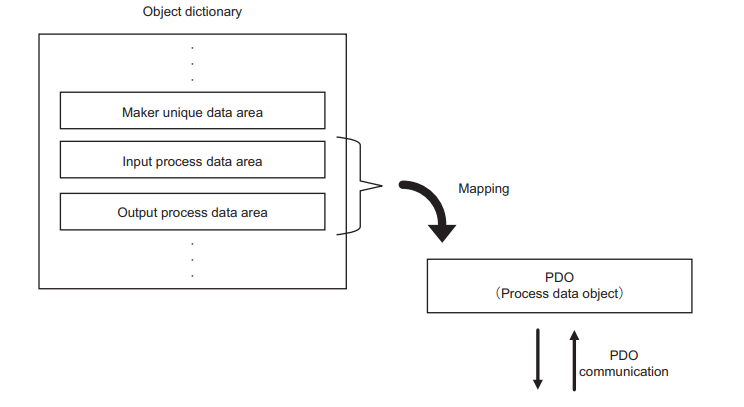
Object dictionary
Object dictionaryはEtherCATデバイス内でアプリケーション部と通信部の間で通信をやり取りするための情報テーブルです。中にはEtherCATデバイスが扱う情報を記述します。
また、個々の情報はObjectと呼ばれる。
Process Data Object通信を使用し、該当するObjectのCoE通信領域のプロセスデータを読み書きし、またMailbox通信を使用して、該当するObjectの製造者固有領域のパラメータを読み書きすることが可能です。
Process data object communication function
PDO通信機能には、Sync manager2とSync manager3を使用します。。その通信機能を使用することにより、マスタ・スレーブ間でサイクリック(I/O)通信が可能となります。
Object dictionaryに配置されたデータの一部をProcess Data Objectトに割り当てることで通信を行います。Process Data Objectには2種類あります。
- マスタからスレーブへデータを送信するRxPDO
- スレーブからマスタへデータを送信するTxPDO
Mailbox communication (Server) function
Mailbox通信機能は、Process Data Object通信以外のタイミングでのデータ通信に使用し、Sync Managerの0と1で管理します。この通信機能を使用し、ハンドシェイクを取りながら通信を行う。また、object dictionaryに配置されている全てのデータの通信が可能です。
What is DC (Distributed Clock)
DC (Distributed Clock)は高精度な時刻同期を行うEtherCAT独自の機能で、KV-XLE02はDCに対応しています。DCによる時刻同期機能により、EtherCATマスタと各スレーブ間で同じ時刻が同期され、EtherCATマスタと各スレーブ間の動作タイミングを同期した時刻に合わせることができます。
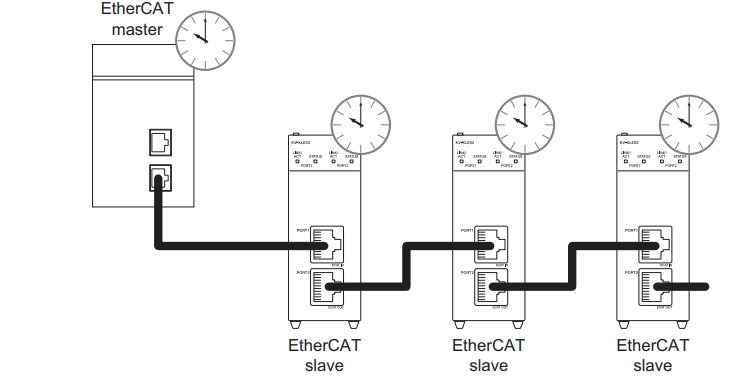
Wiring for EtherCAT Network
KV-XLE02のEtherCAT通信機能は、リング型およびライン型のネットワークトポロジに対応しています。注意するのはEtherCATマスタデバイスと1対1ライン方式で接続する場合(ポート1のみでEtherCAT通信を行う場合)も、EtherCAT通信機能を使用する場合はポート1とポート2の両方を占有するため、ポート2でも汎用イーサネットを使用することはできません。
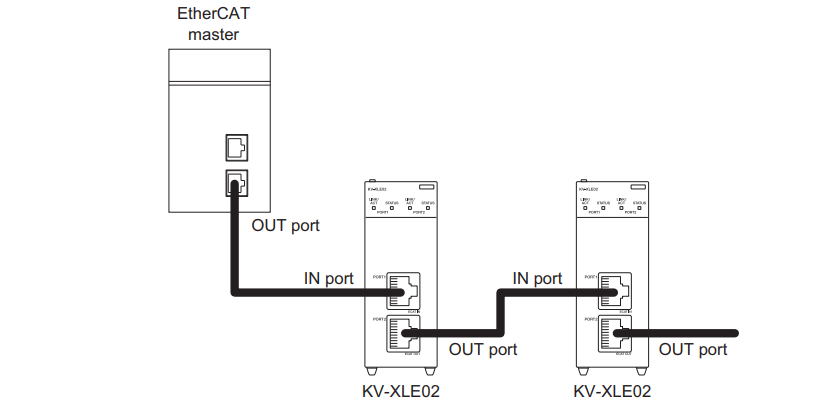
Cable connection method
IN Port (PORT1)
EtherCAT通信の入力ポートです。必ず他のEtherCATデバイスのOUTポートに接続してください。他のEtherCATデバイスのINポートに接続すると通信が正常に行われません。
OUT Port (PORT2)
EtherCAT通信用の出力ポートです。必ず他のEtherCATデバイスのINポートに接続してください。他のEtherCATデバイスのOUTポートに接続すると通信が正常に行われません。
Download ESI File
下記のLinkからKV-XLE02のESI FileをDownloadしてください。
https://www.keyence.co.jp/search/all/?q=KV-XLE02%20ESI

Implementation
Keyence Side
最初はキーエンス側を構築します。
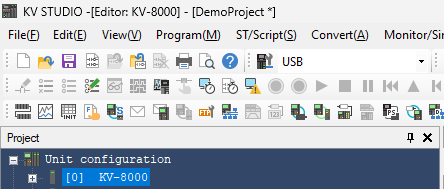
Unit Configuration
KV Studioを立ち上げ、Unit configuration>KV-8000をクリックしHardware Configuration設定画面を立ち上げます。
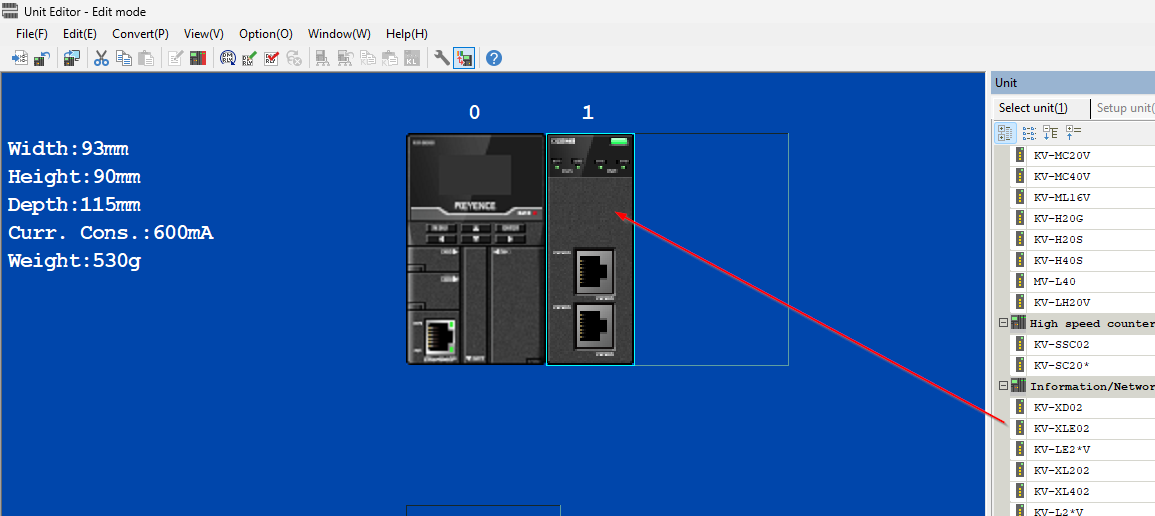
Add KV-XLE02
右にあるSelect Unit画面でKV-XLE02をHardware Configurationに追加します。
Setup unit
次はSetup unit Tabを開き、KV-XLE02の設定を変更します。
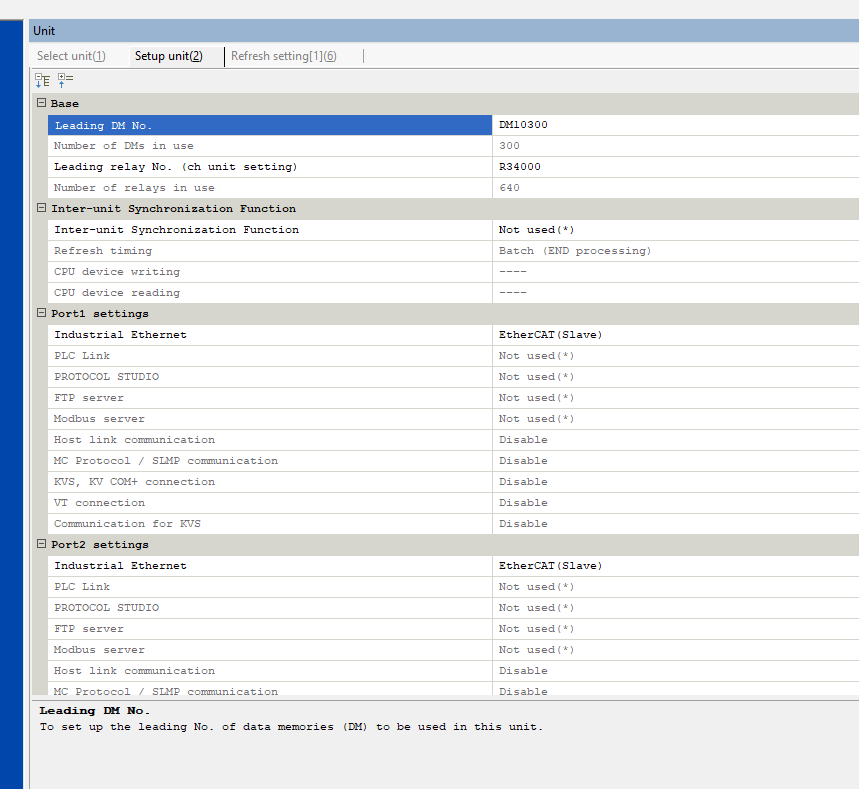
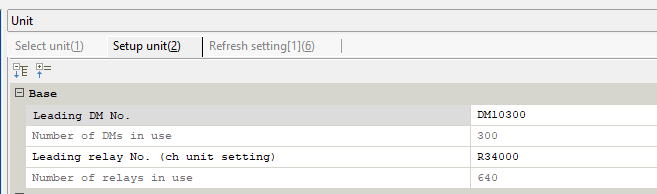
Base
Base設定はKV-XLE02本体の状態や制御を行うデバイスを設定します。
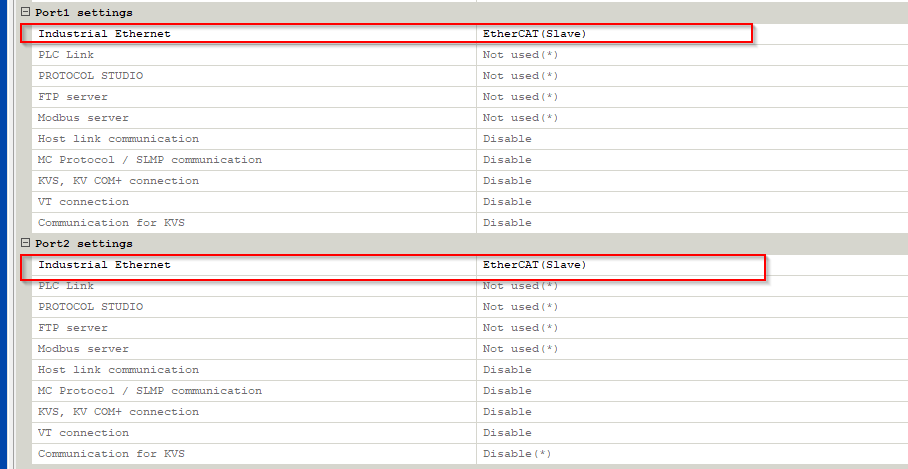
Port1/Port2 Settings
今回記事ではEtherCAT SlaveとしてBeckhoff TwinCAT3と繋がりますので、Port1 settingsとPort2 settingsのIndustrial Ethernetを”EtherCAT(Slave)”に設定します。
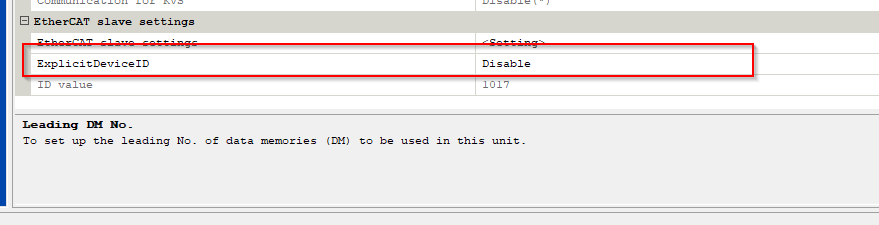
EtherCAT Slave Settings
ExplictDeviceIDをDsiableします。
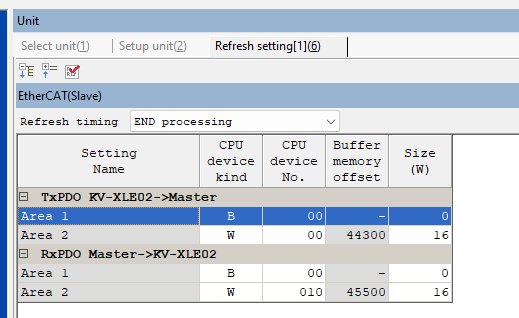
Refresh setting
Refresh settingのTabを開き、Beckhoff TwinCAT3と交換するデータサイズと先頭デバイスを設定します。今回の例ではInputとOutputも16Wordを設定します。
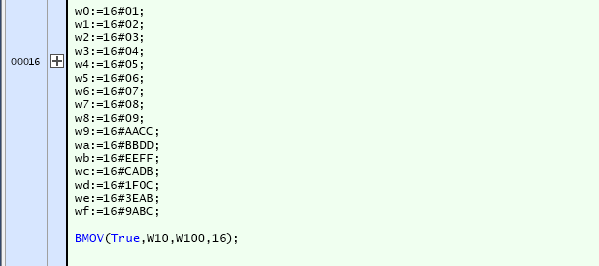
Program
User programに簡単なデータ確認用プログラムを作成します。
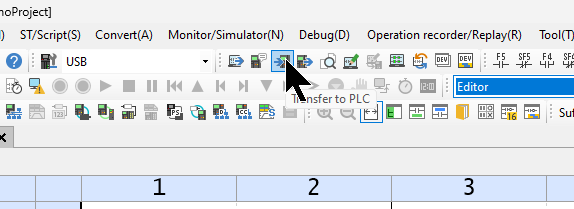
Download
最後はプロジェクトをKV8000にDownloadします。
TwinCAT3 Side
次はTwinCAT3 Sideを構築します。
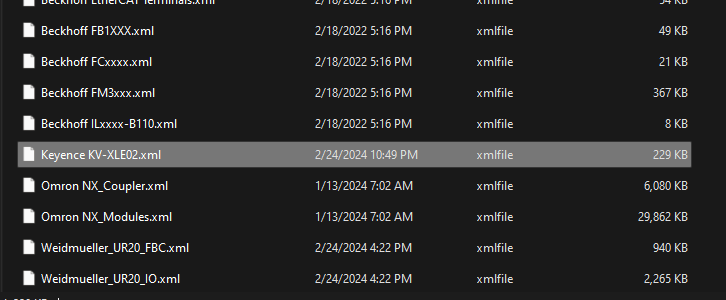
Install ESI File
キーエンスHPからDownloadしたESI Fileを下記のLinkに格納します。
C:\TwinCAT\3.1\Config\Io\EtherCAT
Add EtherCAT Master
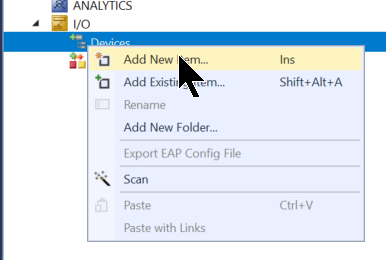
TwinCAT3プロジェクトを作成し、I/O>Devices>Add New Itemで新しい通信Driverを追加します。
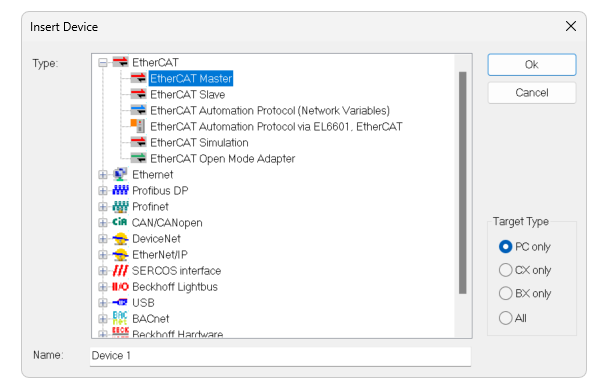
EtherCAT>EtherCAT Masterを選び、Okで進みます。
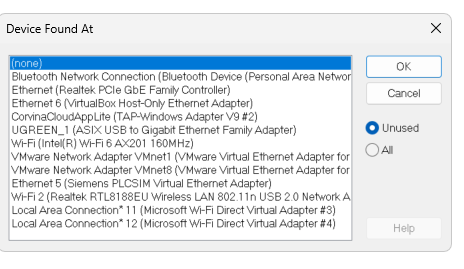
今回TwinCAT3でEtherCAT Masterとして使用するEthernet Adapterを設定しましょう。
Scan Network
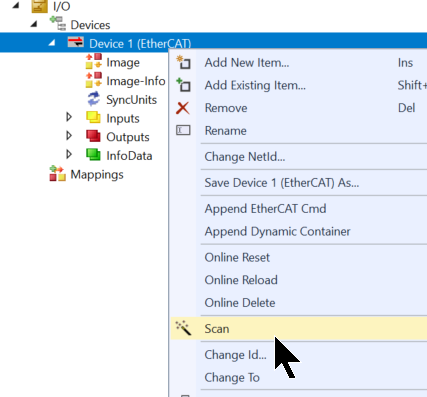
今回はTwinCAT3のSlave自動検出機能を使ってEtherCAT SlaveをScanします。Device>右クリック>Scanします。
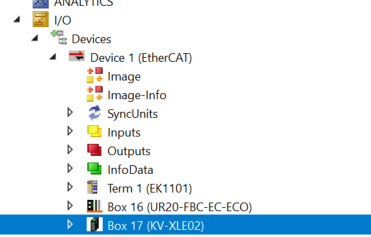
Done!KV-XLE02が見つかりました。
Configuration
次はKV-XLE02の設定を行います。
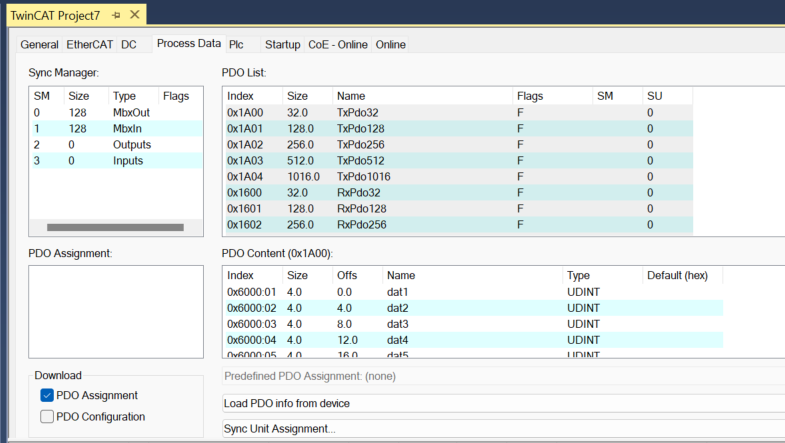
Process Data
Proess DataをTabを開き、KV-XLE02とTwinCAT3間で交換するPDOを設定します。
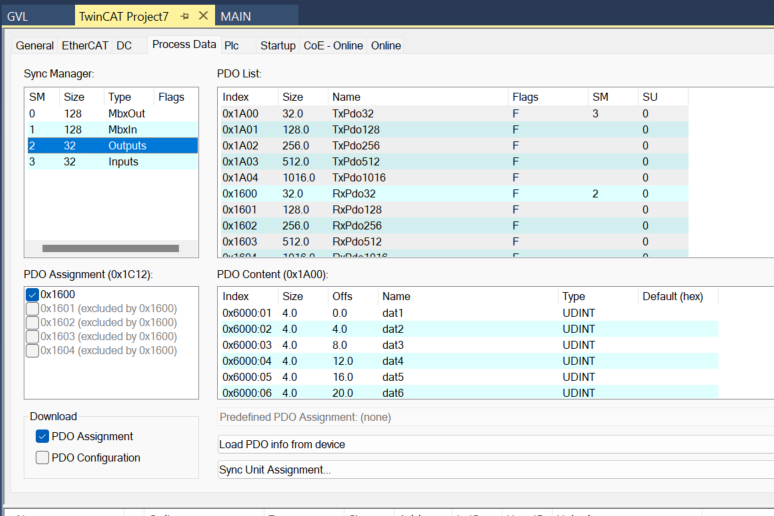
Outputs
Outputsをクリックし、0x1600をCheck入れてください(今回は16Wordの出力データがありますので)。
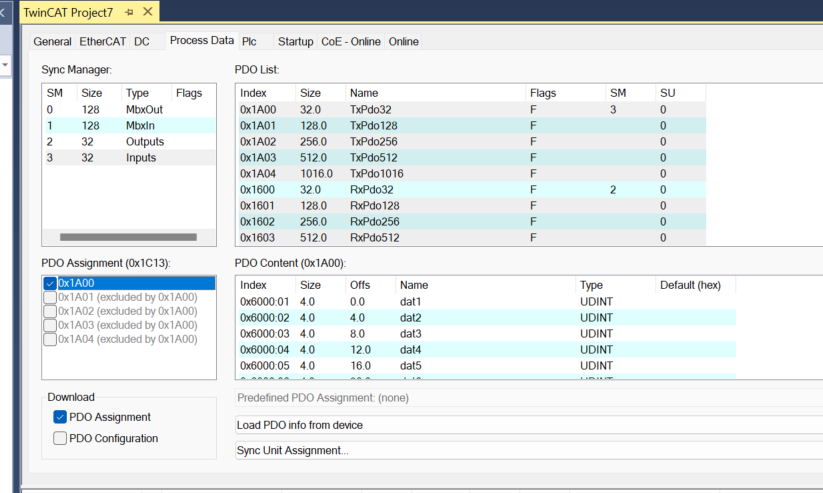
Inputs
Inputsをクリックし、0x1A00をCheck入れてください(今回は16Wordの入力データがありますので)。
Add PLC
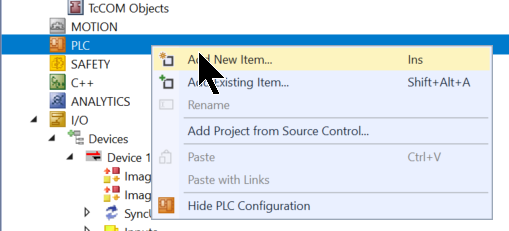
次はPLCを追加するため、PLC>Add New Itemをクリックします。
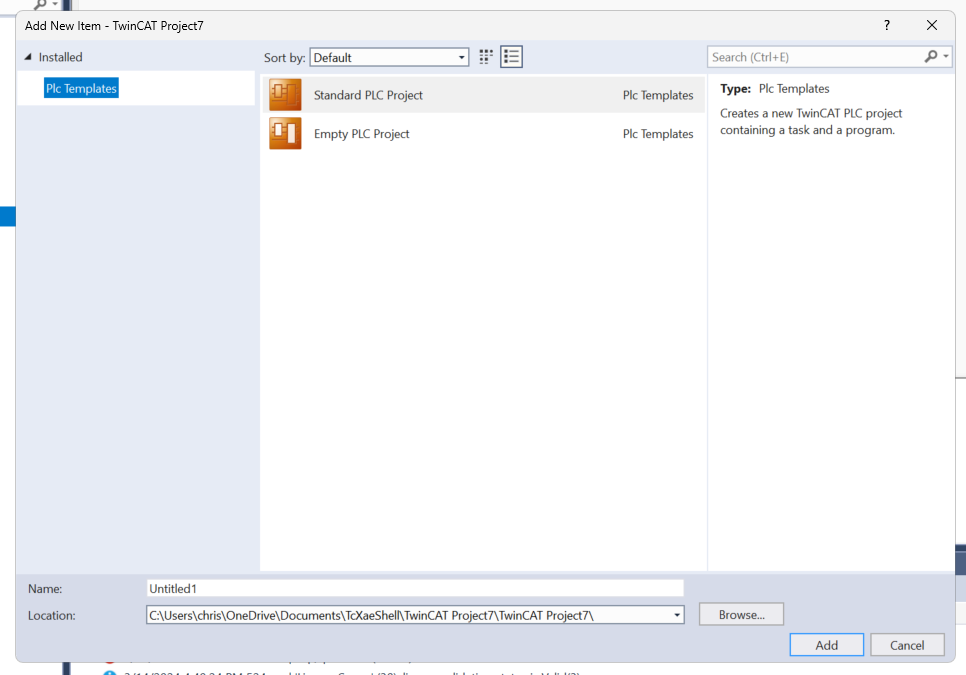
Standard PLC Projectを選び>AddでPLCを追加します。
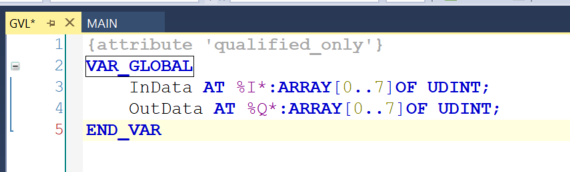
Add GVL
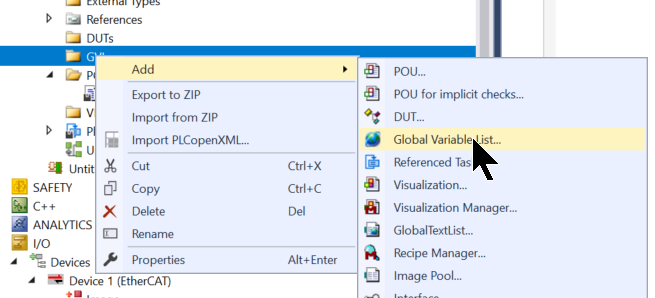
今度はGVLを追加するため、GVL>Add>Global Variable Listをクリックします。
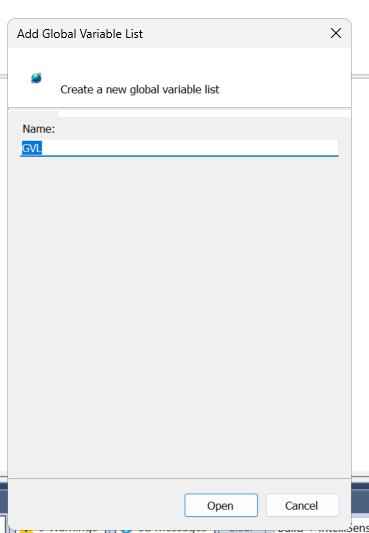
GVL名を入力します。
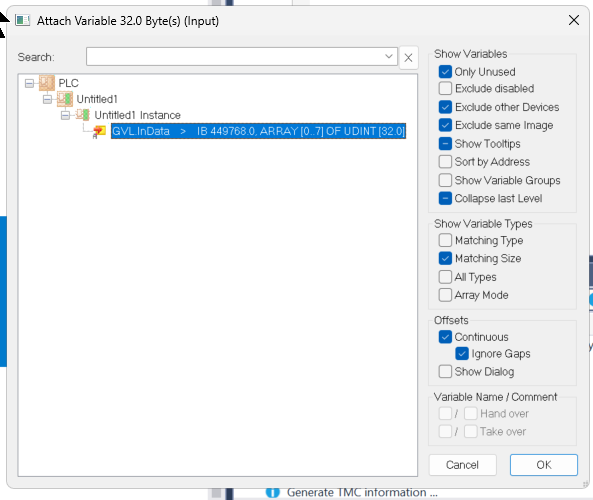
KV-XLE02とMappingするProcess Input/Process Output変数を定義します。
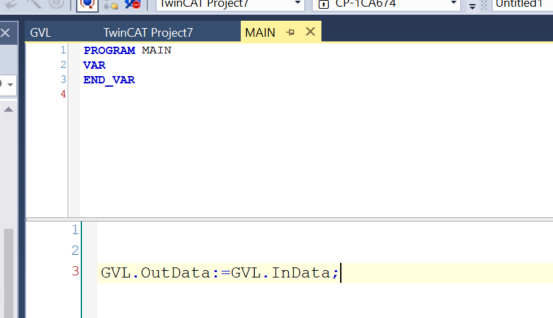
Program
最後は簡単なプログラムを作成します。
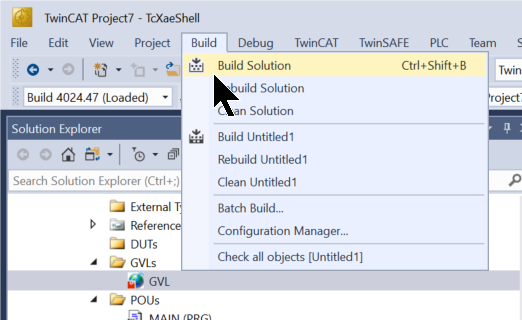
Build
Mappingを行う前に、Build>Build Solutionでプロジェクトをコンパイルします。
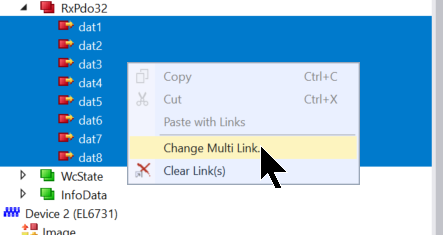
Input Mapping
入力データとMappingするため、先ほど追加した変数をすべて選んでる状態で右クリック>Change Multi Linkします。
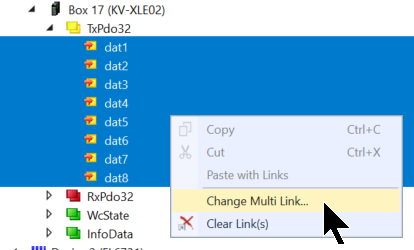
先程GVLで定義したInput Process Dataとリンクしましょう。
Output Mapping
出力も同じの操作でリンクしてください。
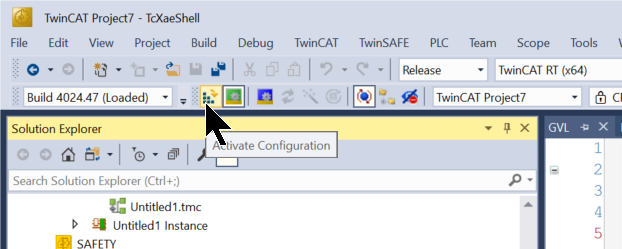
Activate Configuration
最後はプロジェクトをTwinCAT3 RuntimeにDownloadするため、Activate Configurationをクリックします。
Okで進みます。
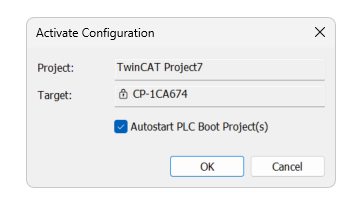
OKをクリックし、TwinCAT RuntimeをRun Modeに変更します。
Login
Loginします。
Result
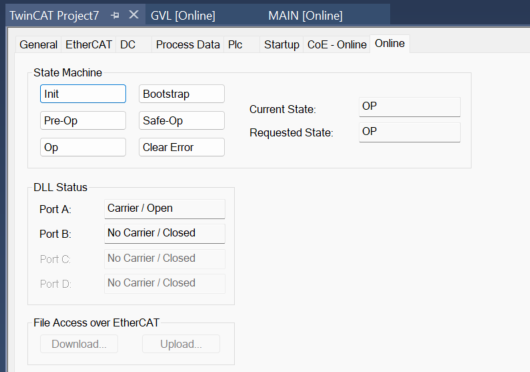
最後はKV-XLE02の通信状態を確認しましょう。
Online Tabを開くと、State MachineはOPの状態です。
つまりKV-XLE02は現在正常な状態です。
KV-XLE02で出力したデータがTwinCAT3側も受けました。
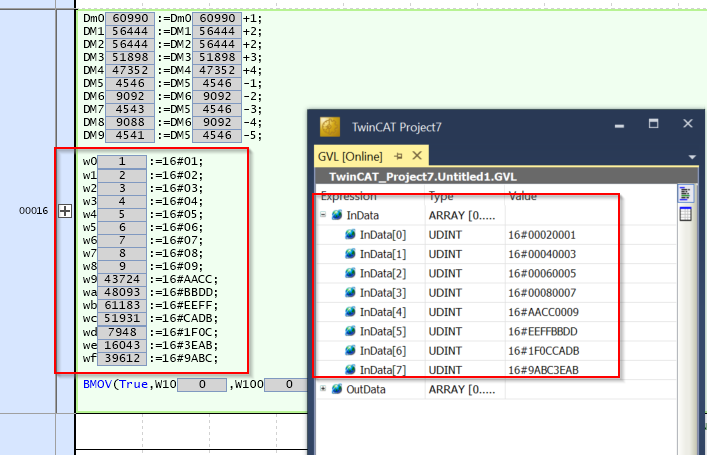
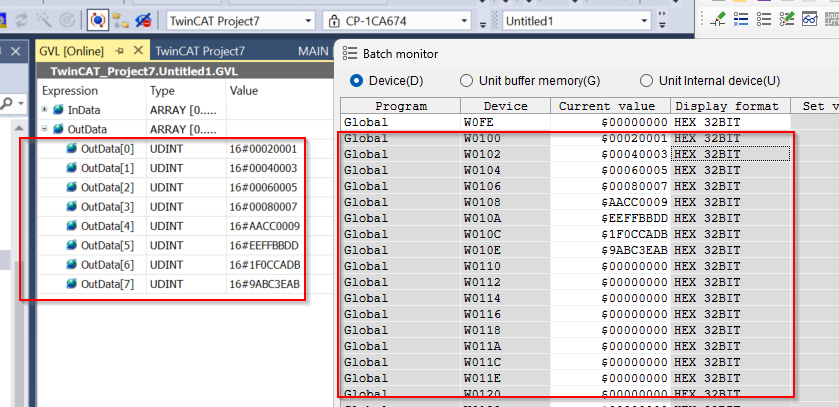
TwinCAT3側も同じく、出力したデータはKV-XLE02が受けました。
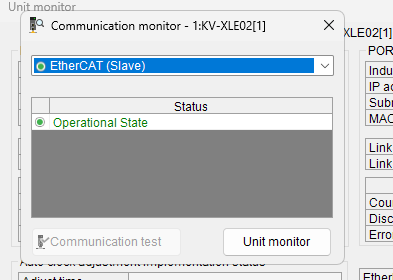
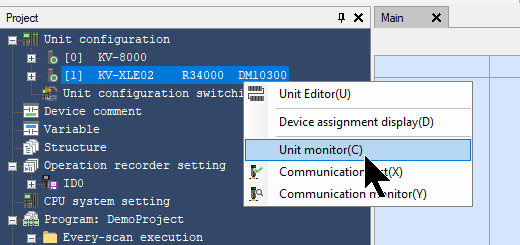
今度はUnitの状態を確認するため、KV-XLE02を右クリック>Unit Monitorをクリックしましょう。
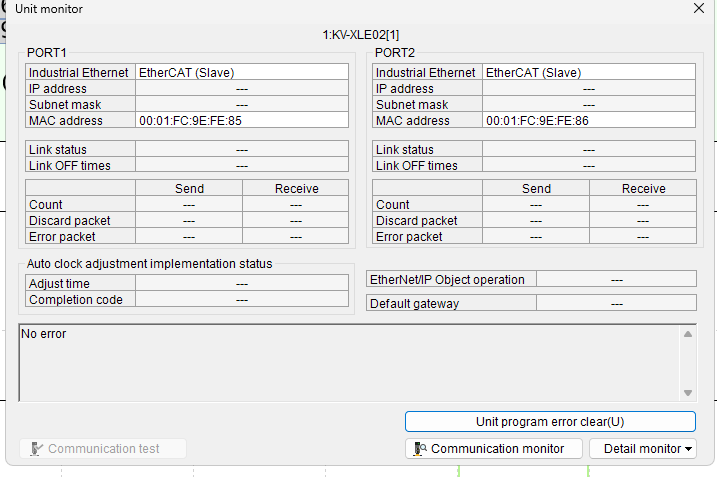
現在KV-XLE02の稼働状態を確認できます。
Communication Monitorをクリックします。
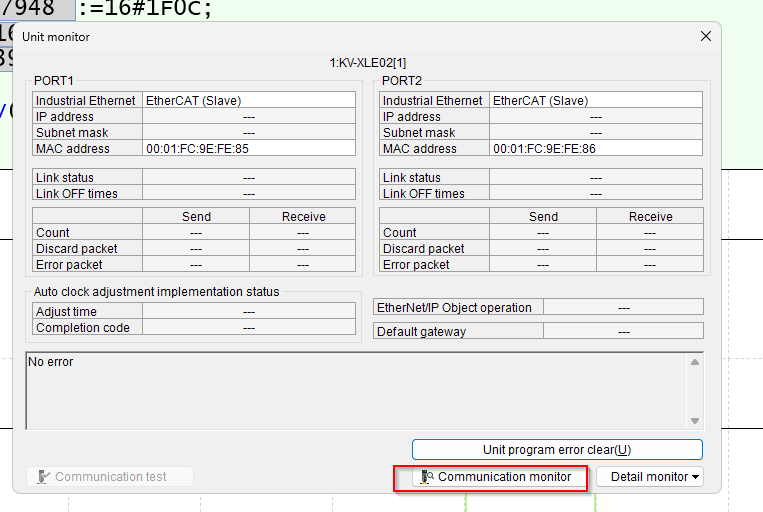
Communication Monitor画面が表示されます。
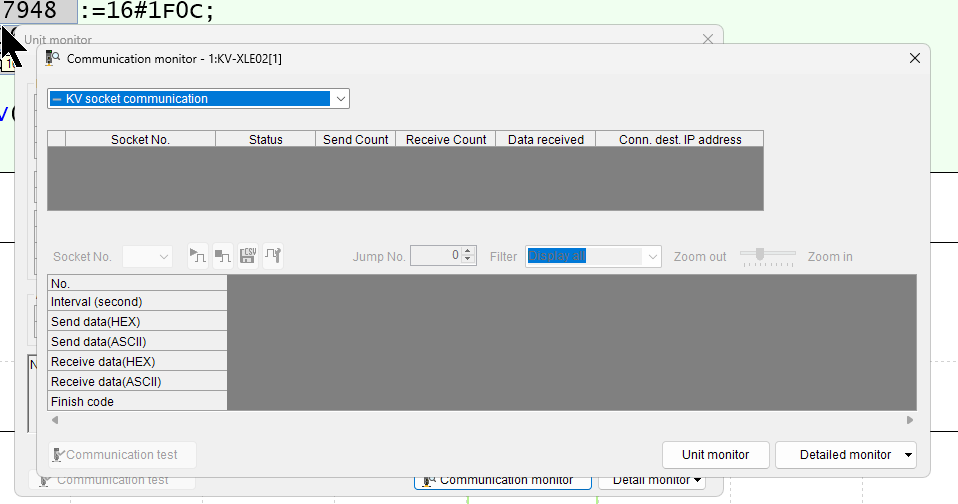
Drop-Listから現在KV-XLE02が設定された通信Modeしか選べましせんので、今回いはEtherCAT(Slave)です。
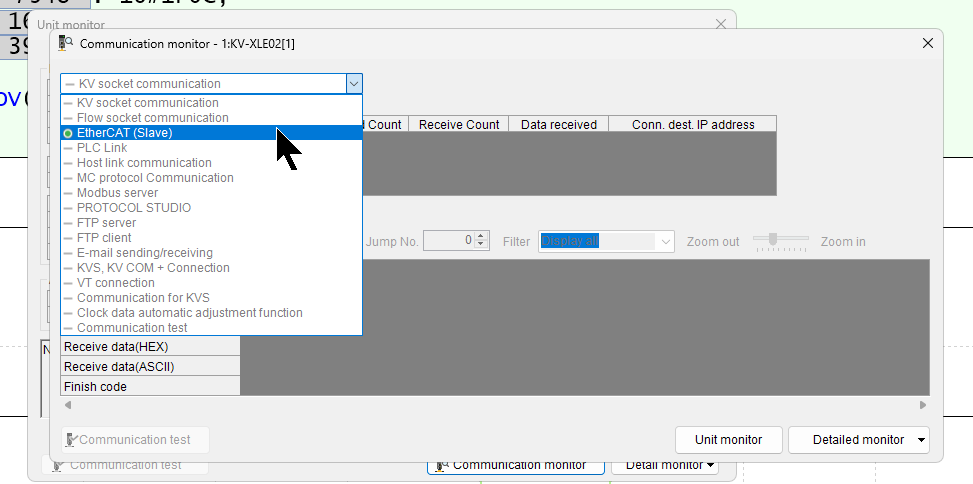
Done!現在はOP状態だと確認できました。