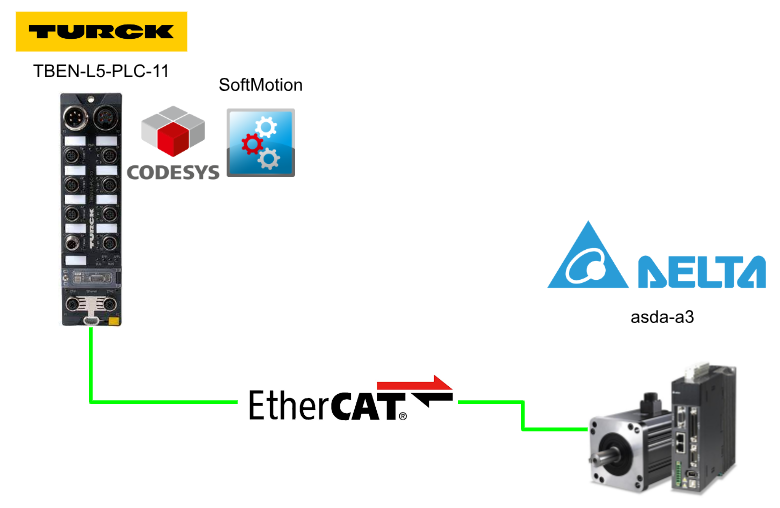
今回の記事ではTURCK社のTBEN-L5-PLC-11 Codesys PLCとCodesys SoftMotionを利用し、Delta社のASDA-A3 ServoドライブをEtherCATで制御します。
さ、FAを楽しもう。
CODESYS SoftMotion
CODESYS SoftMotionはIEC61131-3プログラミングシステムCODESYSに統合された、PLCopen®機能とCAMを備えたコントローラ用のモーションコントロールツールです。
CODESYS SoftMotionを使用することにより、使い慣れたIEC 61131-3プログラミング環境で、単軸から多軸の動作からCAMまで、すべてをロジックアプリケーションとともに直接開発できます。 CODESYS SoftMotionを搭載したモーションコントローラは、PLC開発システムに統合されたツールキットの形でモーション機能を実装できます。
ランタイムシステムCODESYS Control SoftMotionは、CODESYS SoftMotionツールキットでプログラムするために、モーションコントローラに実装する必要があります。

Platform requirements:
CODESYS SoftMotionコントローラを使用する場合、モーションタスクの実装に関して、ユーザにはさまざまなオプションがあります。例えば、提供されているPLCopenモーションPOUを利用したり、IEC 61131-3開発システムの全機能を利用したりすることができます。
- CODESYS Controlでサポートされている必要があります(FPUで最小32ビットを推奨)。
- アプリケーションに位置、速度、加速度データの計算に十分な性能を必要とする。
- アプリケーションに低ジッター値でハードなリアルタイム性を必要とする。
CODESYS SoftMotion contains…
CODESYS SoftMotionには以下のPackagesが含まれています。
- 単軸および多軸動作用の認定 PLCopen POU
- 診断、停止、CAM コントローラなどのアドオン機能用の認定 PLCopen POU
- 動的データのモニタリングやエラーフォロー、CAM および CAM コントローラの操作など、さまざまなタスク用の追加 POU
- CODESYSの可視化を使用して、POUを迅速かつ容易に試運転するための可視化テンプレート
- CAMとCAMコントローラをオンラインで変更できる可視化エレメント
- 豊富な設定オプションを備えた統合グラフィカルCAMエディタ
- 仮想軸と論理軸をサポート
- 多数のCAN、CANopen®、EtherCAT®ドライブ用の統合ドライバ
- ドライブを標準フィールドデバイスとして設定
- CODESYS SoftMotionプロジェクトの例
Servo ASDA-A3?
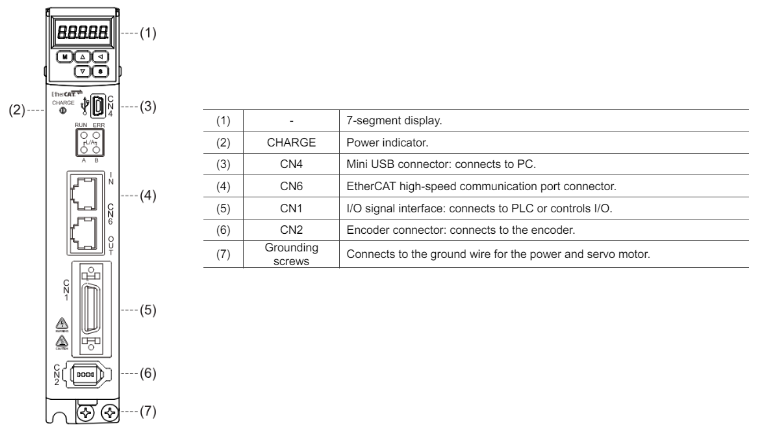
今回使用するのはDelta社のASDA-A3シリーズのServoになります。

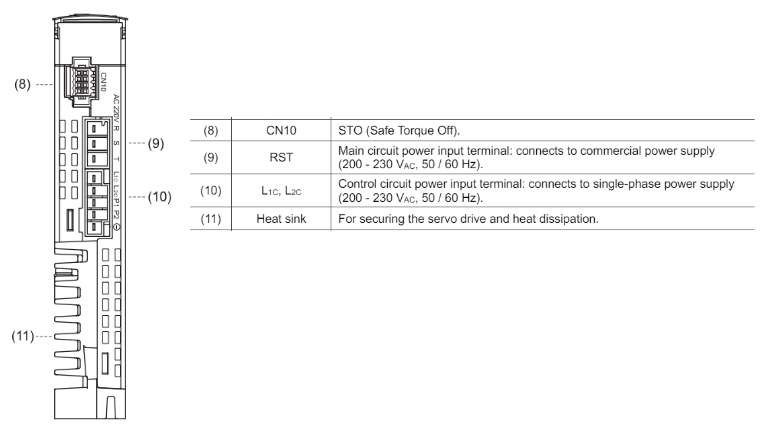
Layout
EtherCAT Mode
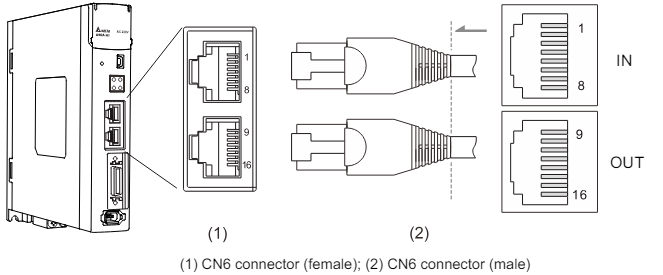
ASDA-A3サーボシステムではEtherCATモードを使用でき、2つのEtherCATコネクタ (CN6) のピン配置は同じです。
注意するのはIN コネクタは受信用としてコントローラ(マスタ)または前のサーボドライブに接続でき、 OUT コネクタは出力用として次のサーボドライブにのみ接続できます。また、接続を誤ると通信ができなくなります。
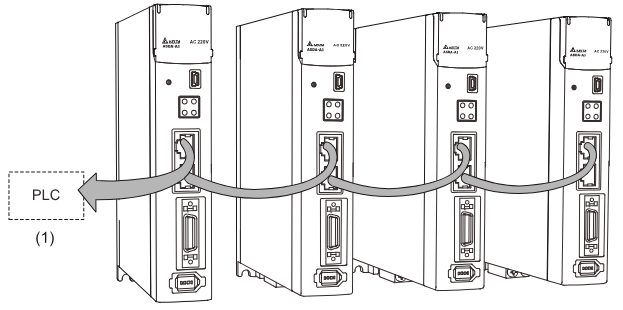
Connection Example
下図では複数のASDA-A3 サーボシステムをEtherCAT ネットワークの接続例です、
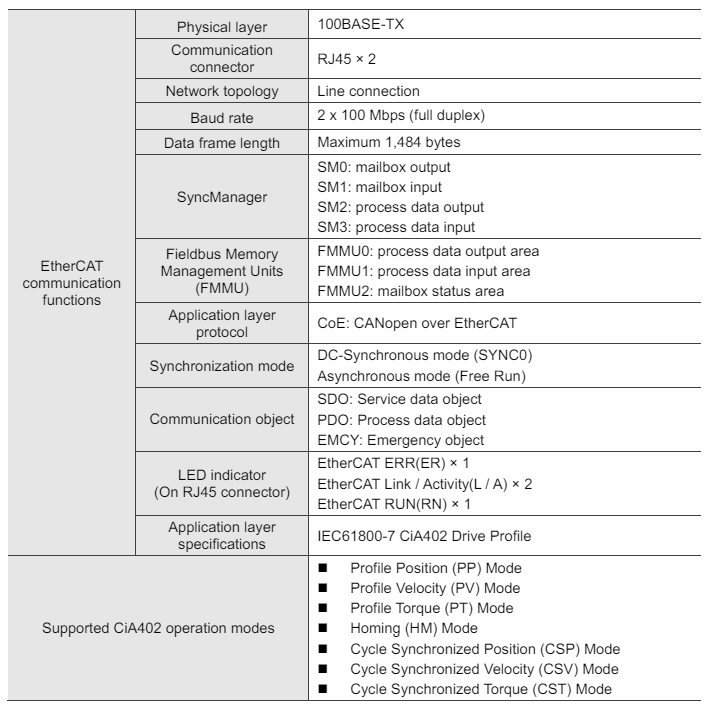
Specification
こちらはASDA-A3サーボシステムのEtherCAT仕様になります。
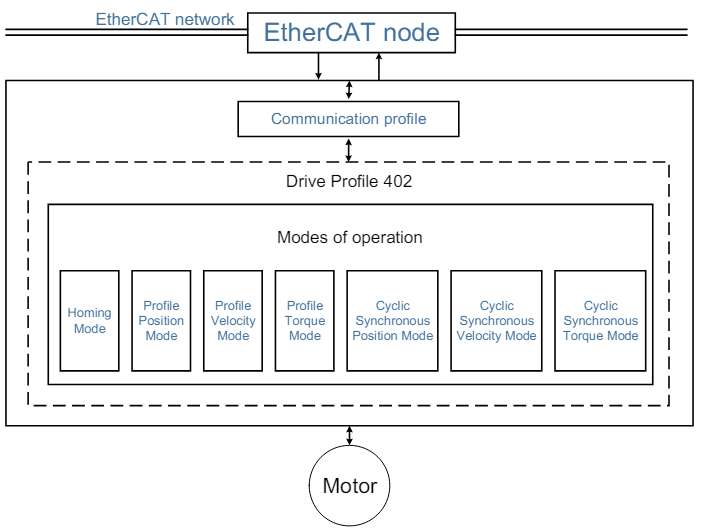
Architecture
サーボドライブのEtherCATアーキテクチャは以下の通りです:
- Communication profile: このプロトコルには、通信オブジェクト(PDO、SDO、SYNC、緊急オブジェクト)と関連するcommunication object dictionaryが含まれる。
- DS402:ドライブとモーションコントロール用のデバイスプロファイルで、各モーションモードの動作と、実行に必要なオブジェクトパラメータ設定を定義します。
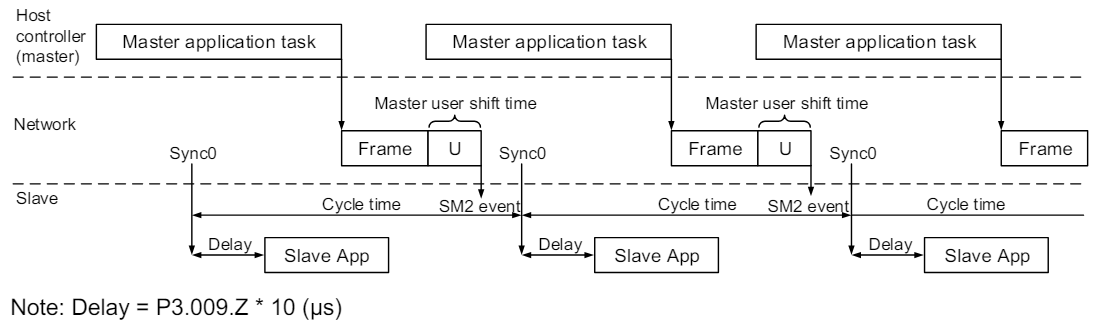
Synchronous mode
Delta社サーボドライブは2つの同期モードをサポートしています: それはFree ModeとDC-Synchronous modeです。
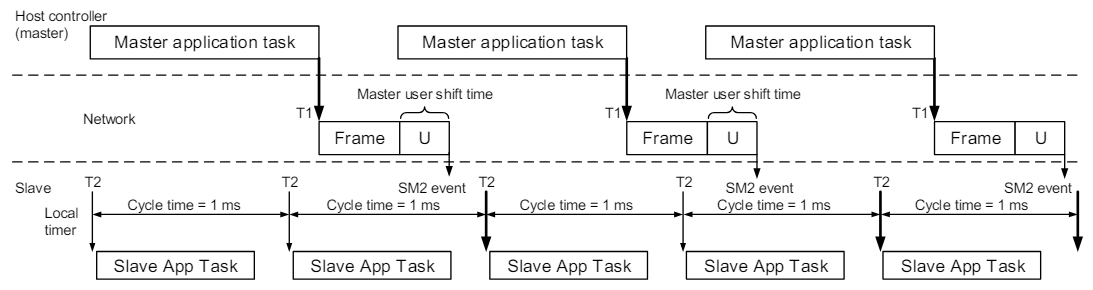
Free Run mode (Asynchronous)
Free Run modeでは、マスター局とスレーブ局は非同期で動作します。各ステーションは時間を計算する個別のクロックを持っており、マスターとスレーブのクロックは同期していません。マスターとスレーブ間のコマンドとフィードバックの送信は、正確な時間同期ではなく、シーケンシャルな順序に基づいている。例えば、マスターは時刻T1にPDOを送信し、スレーブはSM2イベント後のT2にPDOを受信する。
DC-Synchronous mode (SYNC0 synchronization)
マスタ局とスレーブ局の間には正確な時刻同期があり、マスターは制御プログラムを定期的に実行し、同期クロックに従って決まった時間にPDOパケットを送信するようになります。マスターはスレーブにコマンドを送信し、スレーブからのフィードバックを受信し、スレーブは同期クロックに従って一定時間ごとにPDOデータを受信し、更新するようになります。
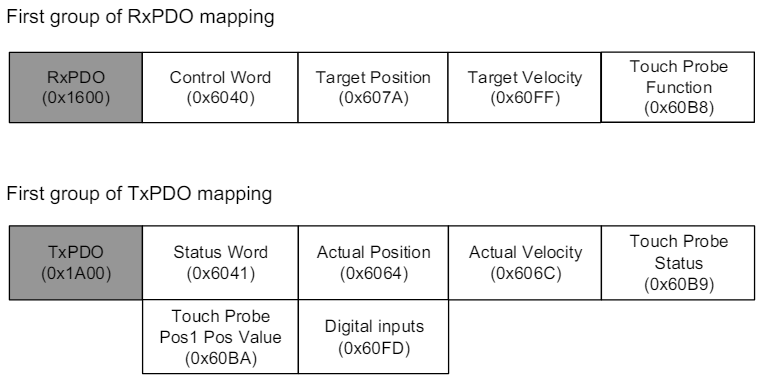
PDO mapping configuration
PDOマッピング・オブジェクトは、object dictionaryの中にRxPDOはインデックスOD 1600からOD 1603まで、TxPDOはインデックスOD 1A00からOD 1A03まで割り当てられます。
RxPDOとTxPDOの各グループは、最大8セットの32ビットオブジェクトのPDOデータ更新をサポートできます。
Default PDO mapping configuration
下表はデータ交換のためのEtherCATサーボドライブのデフォルトPDOマッピング設定です。これはEtherCATスレーブのXMLファイルでも定義され、要求に応じてPDOマッピング設定を変更することができます。
Delta ASDA-x3-E rev0.03.xmlでは、PDOコンフィギュレーションの第1グループから第4グループは以下のようになっています:
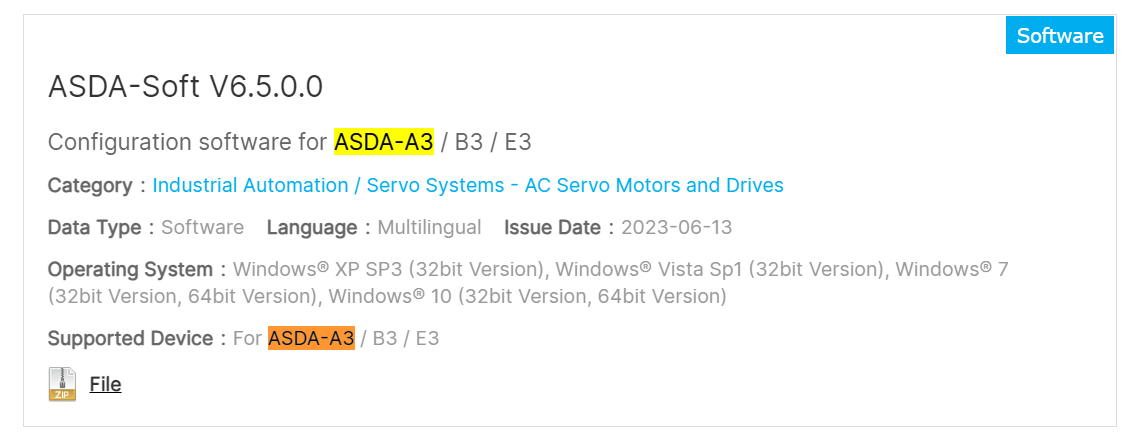
ASDA-Software Tools
Delta社のServoとCommissioningするために、下記のLinkでASDA-SoftをDownloadしましょう。
インストールEXEを起動し、Next>で進みます。
ツールのインストール場所を設定し、Installで進みます。

しばらく待ちます…
USB Driverのインストール画面が表示され、InstallをクリックしてServo Driveと通信するDriverをインストールしましょう。
Done!
Implementation
Delta Drive Side
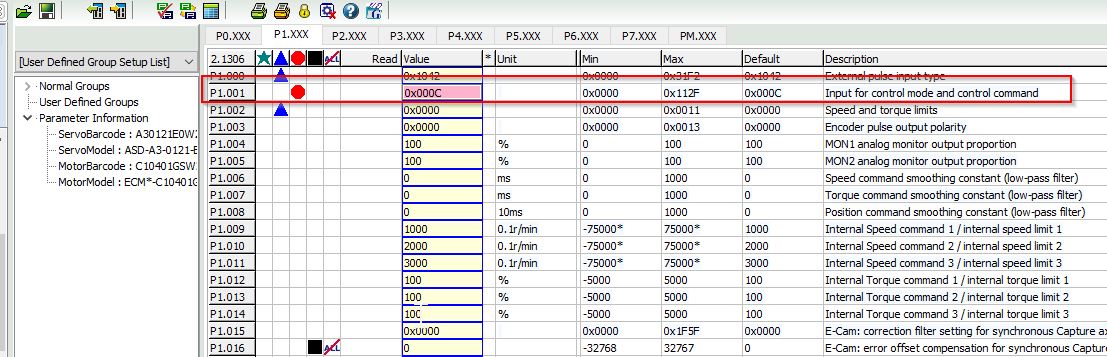
パラメータでP1.001を0x000Cに設定してください。こちらはEtherCAT通信する設定になります。
TURCK Side
Add EtherCAT Master
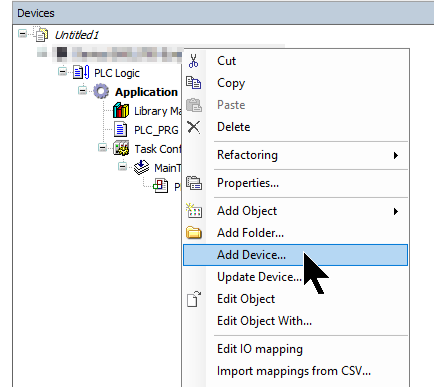
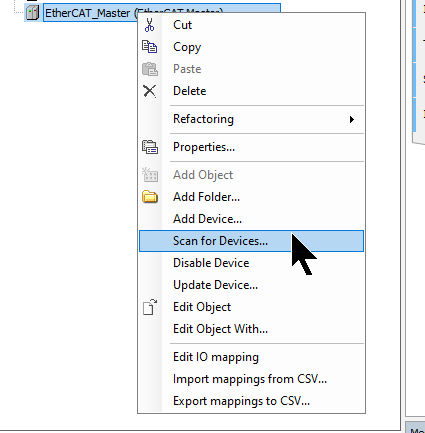
Deviceを右クリック>Add Deviceで通信Driverを追加します。
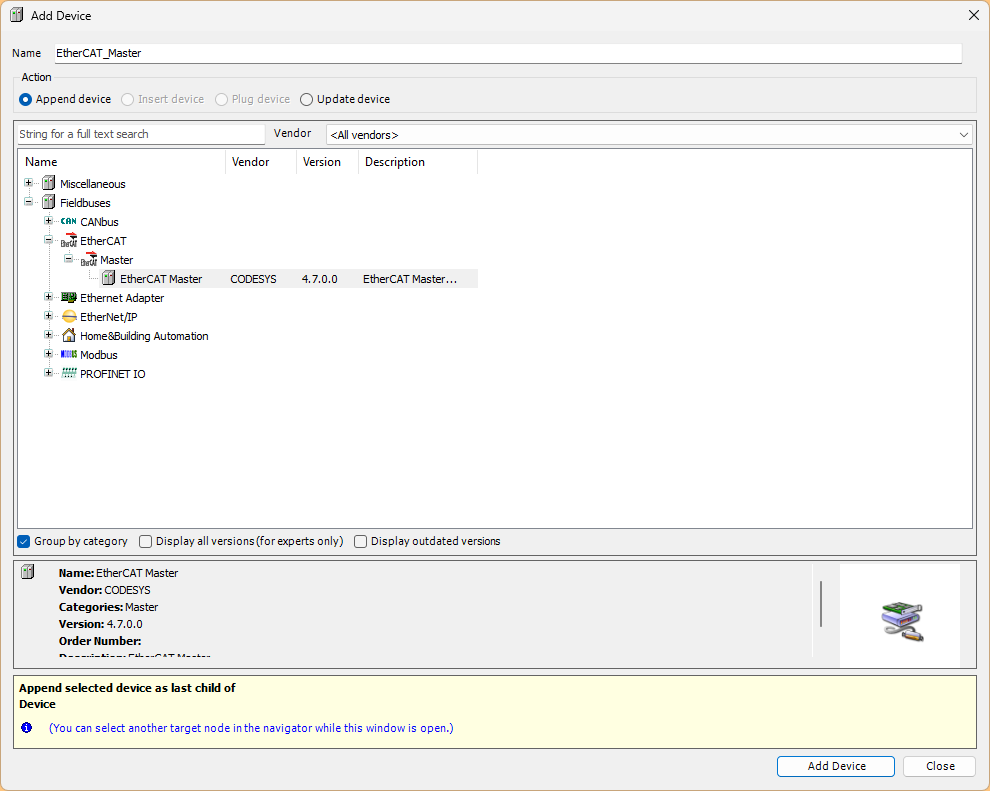
Fieldbus>EtherCAT>Master>EtherCAT Masterを追加します。
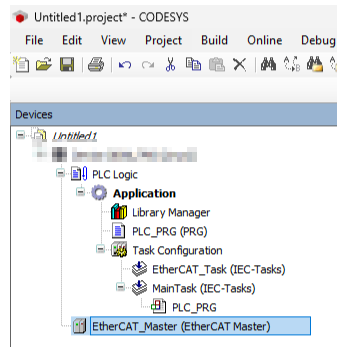
Done!EtherCAT Masterが追加されました。
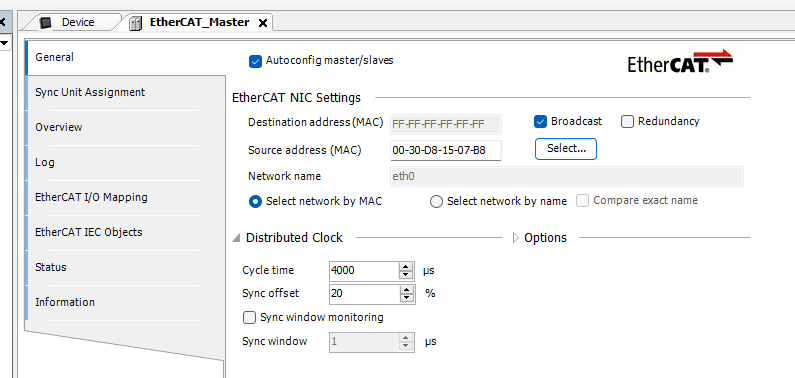
Configure Adapter
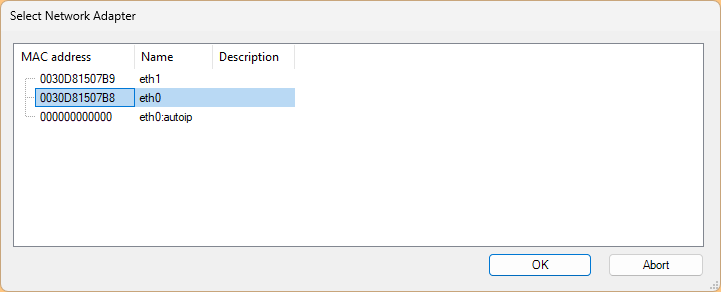
先程追加されたEtherCAT Masterをクリックし、GeneralをTabでSelectをクリックします。
実際アプリケーションでEtherCAT Masterとして使用したいEthernet Adapterを設定してください。
Done!
Scan For Devices
先ほど追加したEtherCAT Masterを右クリック>Scan for Devicesをクリックし、EtherCATネットワーク内のスレーブを検索しましょう。
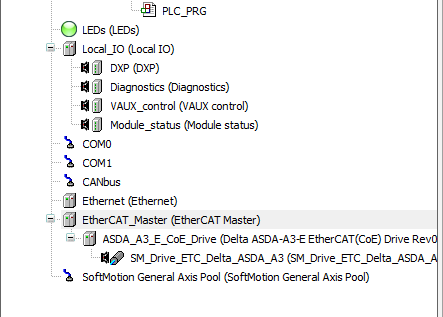
Done!Delta社のServo ドライブを確認できましたので、Copy All Devices to ProjectをクリックしネットワークのSlaveをプロジェクトに複製しましょう。
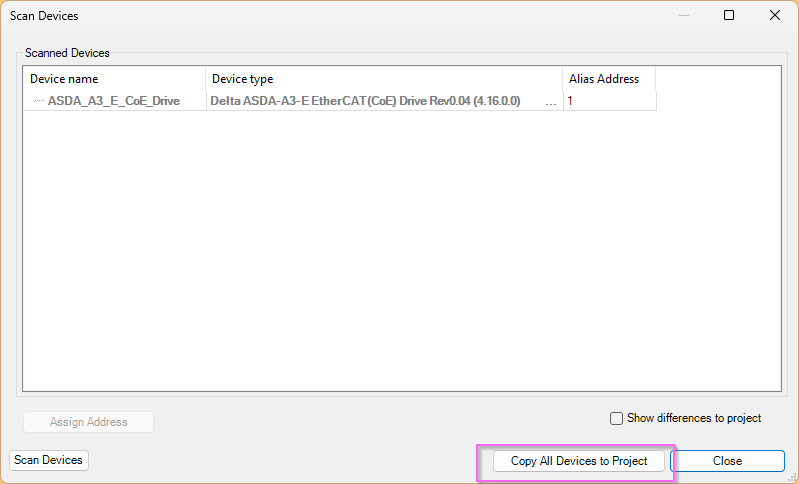
Done!
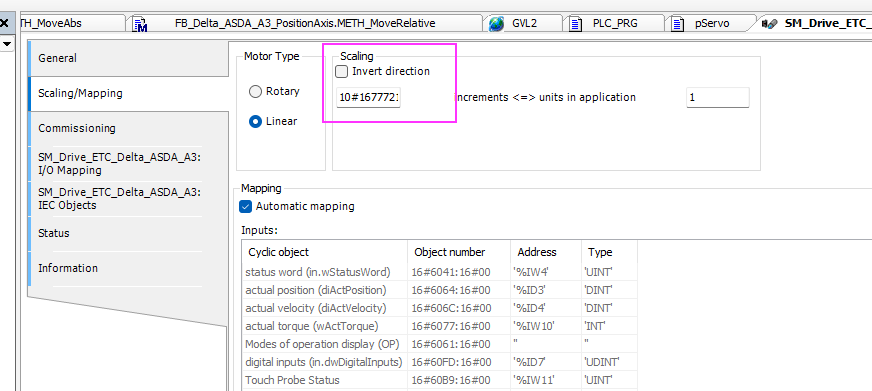
Configuration
今回記事で使用するDelta社のServoドライブの分解能は16777216=1回転なので、Scaling/MappingをTabを開き、Scalingを16777216に入力してください。
次はIncremenets<==>units in application の欄に1を入力します。つまり現在1回転は1mmになります。
Program
次はプログラムを作成します。今回はInterface・Function Block・Extendなど少しOOPのコンセプトを踏みながらプログラムを作成していきます。
Interface
まずはIntefaceの作成から始めます。Intefaceを使用すると、該当するFunction Blockが”なに”をすることだけに集中でき、”どう”やるかのプログラムと分割することができます。また、複数の異なるFunction BlockにもIntefaceだけ共通し、より統一的なプログラムを作成することが可能です。
ITF_SpeedAxis
こちらはServoを速度制御するときの”やること”を定義します。
METH_Half
こちらのMethodはServoが実行中のJOBを停止できます。
| METHOD METH_Half : INT VAR_INPUT iCmd:BOOL; END_VAR |
METH_JogFWBW
こちらのMethodはServoのJOG操作になります。
| METHOD METH_JogFWBW : INT VAR_INPUT iFw,iBw:BOOL; iVelSetpoint:LREAL; iVelAcc,iVelDec:LREAL; END_VAR |
METH_PowerON
こちらのMethodはServo ON操作になります。
| METHOD METH_PowerON : INT VAR_INPUT iCmd:BOOL; END_VAR |
METH_Reset
こちらのMethodはServoのリセット操作になります。
| METHOD METH_Reset : INT VAR_INPUT iCmd:BOOL; END_VAR |
METH_VelocityCmd
こちらのMethodはServoの定速運転操作になります。
| METHOD METH_VelocityCmd : INT VAR_INPUT iCmd:BOOL; iVelSetpoint:LREAL; iVelAcc,iVelDec:LREAL; END_VAR |
PROPERTY Prop_CommunicationOK : BOOL
こちらのPROPERTYからServoの通信状態を取得できます。
PROPERTY Prop_Error : Bool
こちらのPROPERTYからServoのエラー状態を取得できます。
PROPERTY Prop_Ready : Bool
こちらのPROPERTYからServoの準備OK信号を取得できます。
PROPERTY Prop_Running : Bool
こちらのPROPERTYからServoの移動中信号を取得できます。
PROPERTY Prop_Stopped : Bool
こちらのPROPERTYからServoの停止中信号を取得できます。
ITF_PositionAxis EXTENDS ITF_SpeedAxis
新しいInterfaceを定義し、INTERFACE ITF_SpeedAxisから拡張しましょう。
METH_Home
こちらのMethodはServoをHomeすることができます。
| METHOD METH_Home : INT VAR_INPUT iCmd:BOOL; END_VAR |
METH_MoveRelative
こちらのMethodはServoに相対位置決め操作を実装します。
| METHOD METH_MoveRelative : INT VAR_INPUT iCmd:BOOL; iVelSetpoint:LREAL; iVelAcc,iVelDec:LREAL; iDistance:LREAL; END_VAR |
METH_MoveAbs
こちらのMethodはServoに絶対位置決め操作を実装します。
| METHOD METH_MoveAbs : INT VAR_INPUT iCmd:BOOL; iVelSetpoint:LREAL; iVelAcc,iVelDec:LREAL; iPosition:LREAL; END_VAR |
DUT
次は構造体を定義します。
eAxisBasicReturnValue
こちらの列挙からMethodの戻り値になります。
| {attribute ‘qualified_only’} {attribute ‘strict’} TYPE eAxisBasicReturnValue : ( init ,ERROR ,Done ,Busy ,nop ,InVelocity ); END_TYPE |
Function Block
FB_Delta_ASDA_A3_SpeedAxis
こちらのFunction Blockでは先ほど定義したITF_SpeedAxis Interfaceを実装します。
| FUNCTION_BLOCK FB_Delta_ASDA_A3_SpeedAxis IMPLEMENTS ITF_SpeedAxis VAR_INPUT ioAxis :REFERENCE TO AXIS_REF_ETC_Delta_ASDA_A3; END_VAR VAR_OUTPUT END_VAR VAR_IN_OUT END_VAR VAR _MC_Power:MC_Power; _MC_Reset:MC_Reset; _MC_Half:MC_Halt; _MC_Jog:MC_Jog; _MC_MoveVelocity:MC_MoveVelocity; END_VAR |
METH_Half
こちらは実行中のJOBを停止するためのMethodの実装になります。
| METHOD METH_Half : INT VAR_INPUT iCmd:BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Halfを使用しServo軸が実行中のJobを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_Half( Axis:=ioAxis ,Execute:=iCmd ,Deceleration:=100.0 ); IF R_TRIG.Q THEN METH_Half:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Half.Error THEN METH_Half:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Half.Busy THEN METH_Half:=eAxisBasicReturnValue.Busy; ELSIF _MC_Half.Done THEN METH_Half:=eAxisBasicReturnValue.Done; END_IF |
METH_JogFWBW
こちらはSERVOのJOB操作するMethodの実装になります。
| METHOD METH_JogFWBW : INT VAR_INPUT iFw,iBw:BOOL; iVelSetpoint:LREAL; iVelAcc,iVelDec:LREAL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR VAR fw,bw:BOOL; END_VAR |
MC_Jogを使用しServo軸のJOG操作を実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| fw:=iFw AND NOT iBw; bw:=iBw AND NOT iFw; R_TRIG( CLK:=(iFw AND NOT iBw) OR (iBw AND NOT iFw) ); _MC_Jog( Axis:=ioAxis ,JogForward:=fw ,JogBackward:=bw ,Velocity:=iVelSetpoint ,Acceleration:=iVelAcc ,Deceleration:=iVelDec ); IF R_TRIG.Q THEN METH_JogFWBW:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Jog.Error THEN METH_JogFWBW:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Jog.Busy THEN METH_JogFWBW:=eAxisBasicReturnValue.Busy; END_IF |
METH_PowerON
こちらはSERVO ON操作の実装になります。
| METHOD METH_PowerON : INT VAR_INPUT iCmd:BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Powerを使用しServo軸のServo ON/OFFを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_Power( Axis:=ioAxis ,Enable:=iCmd ,bRegulatorOn:=iCmd ,bDriveStart:=iCmd ); IF R_TRIG.Q THEN METH_PowerON:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Power.Error THEN METH_PowerON:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Power.Busy THEN METH_PowerON:=eAxisBasicReturnValue.Busy; ELSIF _MC_Power.Enable THEN METH_PowerON:=eAxisBasicReturnValue.Done; END_IF |
METH_Reset
こちらはSERVOのリセット操作の実装になります。
| METHOD METH_Reset : INT VAR_INPUT iCmd:BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Resetを使用しServo軸のServo ON/OFFを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_Reset( Axis:=ioAxis ,Execute:=iCmd ); IF R_TRIG.Q THEN METH_Reset:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Reset.Error THEN METH_Reset:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Reset.Busy THEN METH_Reset:=eAxisBasicReturnValue.Busy; ELSIF _MC_Reset.Done THEN METH_Reset:=eAxisBasicReturnValue.Done; END_IF |
METH_VelocityCmd
こちらはSERVOの定速運転の実装になります。
| METHOD METH_VelocityCmd : INT VAR_INPUT iCmd:BOOL; iVelSetpoint:LREAL; iVelAcc,iVelDec:LREAL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_MoveVelocityを使用しServo軸のServo ON/OFFを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_MoveVelocity( Axis:=ioAxis ,Execute:=iCmd ,Velocity:=iVelSetpoint ,Acceleration:=iVelAcc ,Deceleration:=iVelDec ); IF R_TRIG.Q THEN METH_VelocityCmd:=eAxisBasicReturnValue.nop; END_IF; IF _MC_MoveVelocity.Error THEN METH_VelocityCmd:=eAxisBasicReturnValue.ERROR; ELSIF _MC_MoveVelocity.Busy THEN METH_VelocityCmd:=eAxisBasicReturnValue.Busy; ELSIF _MC_MoveVelocity.InVelocity THEN METH_VelocityCmd:=eAxisBasicReturnValue.InVelocity; END_IF |
PROPERTY Prop_CommunicationOK : BOOL
こちらのPropertyはIodataInvalidの変数から通信OKかを判定します。
| Prop_CommunicationOK:=ioAxis.bCommunication; |
PROPERTY Prop_Error : BOOL
こちらのPropertyはErrorの変数から通信OKかを判定します。
| Prop_Error:=ioAxis.bError; |
PROPERTY Prop_Ready : BOOL
こちらのPropertyはReadyの変数からServoの準備OK状態を判定します。
| Prop_Ready:=ioAxis.bDriveStartRealState; |
PROPERTY Prop_Running : BOOL
こちらのPropertyはReadyの変数からServoが移動してるかを判定します。
| Prop_Running:= ioAxis.bAccelerating OR ioAxis.bDecelerating OR ioAxis.fActVelocity>1.0 OR ioAxis.fActVelocity<-1.0 ; |
PROPERTY Prop_Stopped : BOOL
こちらのPropertyはReadyの変数からServoが停止してるかを判定します。
| Prop_Stopped:= NOT ioAxis.bAccelerating AND NOT ioAxis.bDecelerating AND NOT (ioAxis.fActVelocity >1.0) AND NOT (ioAxis.fActVelocity <-1.0) ; |
FB_Delta_ASDA_A3_PositionAxis
次は位置決め用のFBを作成しましょう。こちらのFB先ほど作ったFB_Delta_ASDA_A3_SpeedAxisを拡張し、またITF_PositionAxisを実装する形になります。
| FUNCTION_BLOCK FB_Delta_ASDA_A3_PositionAxis EXTENDS FB_Delta_ASDA_A3_SpeedAxis IMPLEMENTS ITF_SpeedAxis, ITF_PositionAxis VAR_INPUT END_VAR VAR_OUTPUT END_VAR VAR _MC_MoveAbsolute:MC_MoveAbsolute; _MC_MoveRelative:MC_MoveRelative; _MC_Home:MC_Home; END_VAR |
METH_Home
こちらはSERVOのHOME操作するMethodの実装になります。
| METHOD METH_Home : INT VAR_INPUT iCmd : BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Homeを使用しServo軸のHome操作を実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_Home( Axis:=ioAxis ,Execute:=iCmd ,Position:=0.0 ); IF R_TRIG.Q THEN METH_Home:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Home.Error THEN METH_Home:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Home.Busy THEN METH_Home:=eAxisBasicReturnValue.Busy; ELSIF _MC_Home.Done THEN METH_Home:=eAxisBasicReturnValue.Done; END_IF |
METH_MoveAbs
MC_MoveAbsoluteを使用しServo軸の絶対位置決めを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| METHOD METH_MoveAbs : INT VAR_INPUT iCmd:BOOL; iVelSetpoint:LREAL; iVelAcc,iVelDec:LREAL; iPosition:LREAL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
| R_TRIG(CLK:=iCmd); _MC_MoveAbsolute( Axis:=ioAxis ,Execute:=iCmd ,Position:=iPosition ,Velocity:=iVelSetpoint ,Acceleration:=iVelAcc ,Deceleration:=iVelDec ); IF R_TRIG.Q THEN METH_MoveAbs:=eAxisBasicReturnValue.nop; END_IF; IF _MC_MoveAbsolute.Error THEN METH_MoveAbs:=eAxisBasicReturnValue.ERROR; ELSIF _MC_MoveAbsolute.Busy THEN METH_MoveAbs:=eAxisBasicReturnValue.Busy; ELSIF _MC_MoveAbsolute.Done THEN METH_MoveAbs:=eAxisBasicReturnValue.Done; END_IF |
METH_MoveRelative
MC_MoveRelativeを使用しServo軸の相対位置決めを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| METHOD METH_MoveRelative : INT VAR_INPUT iCmd:BOOL; iVelSetpoint:LREAL; iVelAcc,iVelDec:LREAL; iDistance:LREAL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
| R_TRIG(CLK:=iCmd); _MC_MoveRelative( Axis:=ioAxis ,Execute:=iCmd ,Distance:=iDistance ,Velocity:=iVelSetpoint ,Acceleration:=iVelAcc ,Deceleration:=iVelDec ); IF R_TRIG.Q THEN METH_MoveRelative:=eAxisBasicReturnValue.nop; END_IF; IF _MC_MoveRelative.Error THEN METH_MoveRelative:=eAxisBasicReturnValue.ERROR; ELSIF _MC_MoveRelative.Busy THEN METH_MoveRelative:=eAxisBasicReturnValue.Busy; ELSIF _MC_MoveRelative.Done THEN METH_MoveRelative:=eAxisBasicReturnValue.Done; END_IF |
pServo
こちらはメインプログラムになり、先程作成したFunction Blockを呼び出し、CASE文を使用し絶対位置決めと相対位置決めの繰り返しをします。
| PROGRAM pServo VAR Axis1:FB_Delta_ASDA_A3_PositionAxis; bError:BOOL; bRunning:BOOL; bStopped:BOOL; bPowerON:BOOL; bReset:BOOL; RetValue:INT; bReady:BOOL; bRun:BOOL; bStop:BOOL; fSetValue:REAL; bFw,bBw:BOOL; bHome:BOOL; bMoveAbs,bMoveRelative:BOOL; f32AbsPos,f32AbsVel,f32AbsAcc,f32AbsDec:REAL; f32RelativePos,f32RelativeVel,f32RelativeAcc,f32RelativeDec:REAL; bCommunicationOK:BOOL; iStep:INT; iCount:INT; start:BOOL; R_TRIG:R_TRIG; END_VAR |
| //Axis of Delta Servo Axis1(ioAxis:=SM_Drive_ETC_Delta_ASDA_A3); // RetValue:= Axis1.METH_PowerON( iCmd:=bPowerON ); // bReady:=Axis1.Prop_Ready; bRunning:=Axis1.Prop_Running; bError:=Axis1.Prop_Error; bStopped:=Axis1.Prop_Stopped; bCommunicationOK:=Axis1.Prop_CommunicationOK; // // RetValue:=Axis1.METH_Reset( iCmd:=bReset ); // RetValue:=Axis1.METH_Half( iCmd:=bStop ); // RetValue:=Axis1.METH_Home( iCmd:=bHome ); IF RetValue = eAxisBasicReturnValue.Done THEN bHome:=FALSE; END_IF // RetValue:=Axis1.METH_VelocityCmd( iCmd:=bRun ,iVelSetpoint:=fSetValue ,iVelAcc:=100.0 ,iVelDec:=100.0 ); RetValue:=Axis1.METH_JogFWBW( iFw:=bFw AND NOT bBw ,iBw:=bBw AND NOT bFw ,iVelSetpoint:=fSetValue ,iVelAcc:=100.0 ,iVelDec:=100.0 ); RetValue:=Axis1.METH_MoveAbs( iCmd:=bMoveAbs ,iVelSetpoint:=f32AbsVel ,iVelAcc:=f32AbsAcc ,iVelDec:=f32AbsDec ,iPosition:=f32AbsPos ); RetValue:=Axis1.METH_MoveRelative( iCmd:=bMoveRelative ,iVelSetpoint:=f32RelativeVel ,iVelAcc:=f32RelativeAcc ,iVelDec:=f32RelativeDec ,iDistance:=f32RelativePos ); R_TRIG(CLK:=start); IF R_TRIG.Q THEN iStep:=10; END_IF CASE iStep OF 10: f32RelativePos:=10.0; bMoveRelative:=TRUE; iCount:=iCount+1; IF bRunning THEN iStep:=15; END_IF; 15: IF bStopped THEN iStep:=20; END_IF 20: bMoveRelative:=FALSE; IF iCount>=10 THEN iCount:=0; iStep:=30; ELSE iStep:=10; END_IF; 30: f32RelativePos:=-10.0; bMoveRelative:=TRUE; iCount:=iCount+1; IF bRunning THEN iStep:=35; END_IF; 35: IF bStopped THEN iStep:=40; END_IF 40: bMoveRelative:=FALSE; IF iCount>=10 THEN iCount:=0; iStep:=10; ELSE iStep:=30; END_IF; END_CASE |
Download
最後はプロジェクトをRuntimeにDownloadしてください。
Result
こちらはTURCK PLCからDelta社のServo ドライブをEtherCAT経由で制御する動画です。
Download Project
こちらのLinkから今回の記事のプロジェクトをDownloadできます。
https://github.com/soup01Threes/Codesys/blob/main/TURCK-EtherCAT-DeltaServo.projectarchive
コメント
こちらの記事を参考に他メーカーのサーボドライバを制御するプログラムを作成しようと思っているのですが、FB実装時の「ioAxis : REFARENCE TO 〇〇」の〇〇部分は何を指定すれば良いのでしょうか。