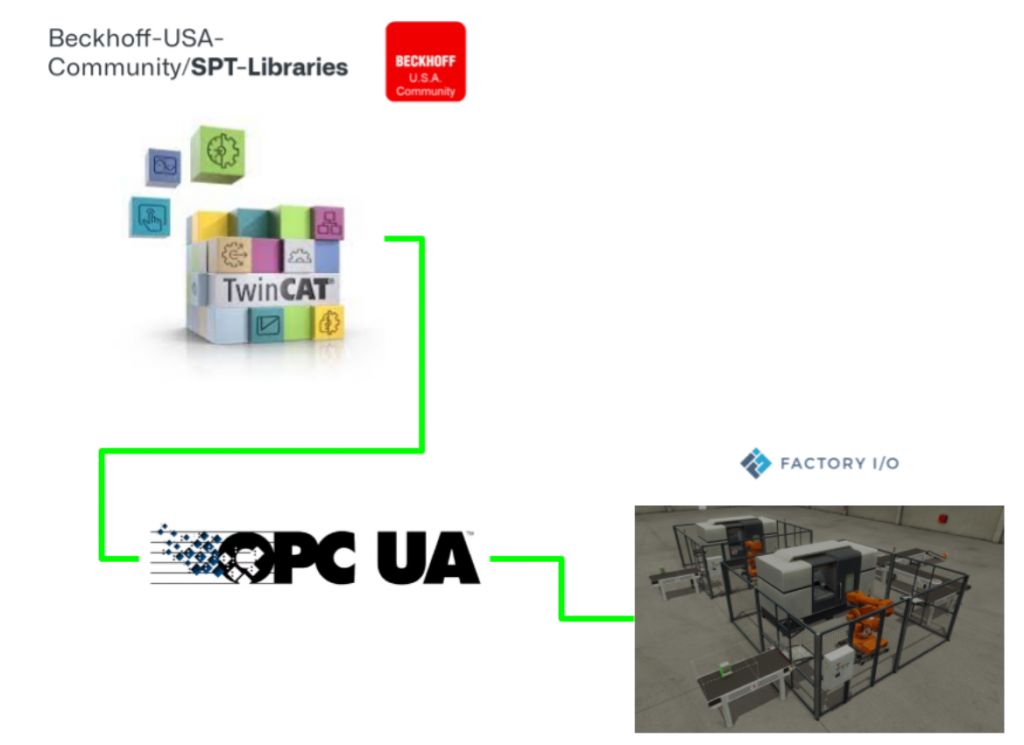
今回の記事ではSPT Frameworkを紹介します。第2話はFB_SingleSolenoidとFB_SingleSolenoidFeedbackを紹介し、またFactoryIOとOPC UA連携して実際の動作を検証します。
さ、FAを楽しもう。
Reference Link
Reference Video
自分のSPTフレームワークの紹介ビデオとライブコード動画です。
前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
現在、私達の活動はほぼ無償で続けており、より多くのコンテンツを提供するためには、皆様の温かいご支援が大変重要です。もし可能であれば、以下のリンクから応援していただけると大変嬉しく思います。
高橋クリスのメンバーシップ
こちらはFullさん(full@桜 八重 (@fulhause) / X)と共にやっているラジオにメンバーシップを登録いただけます。
https://note.com/fulhause/membership/join
AMAZON ギフトリスト
こちらは自分のブログのコンテンツ制作や設備の充実に大いに役立てさせていただきます。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon
こちらは自分のブログのコンテンツ制作や設備の充実に対する小さな応援の気持ちのPatreonです。
https://www.patreon.com/user?u=84249391
皆様のサポートが、私たちの活動をより充実させる力となります。
どうぞよろしくお願いします。
メールアドレス(*=@)
X
Download Library
下記のGithubからBeckhoff USAのSPT ライブラリをDownloadできます。
https://github.com/Beckhoff-USA-Community/SPT-Libraries
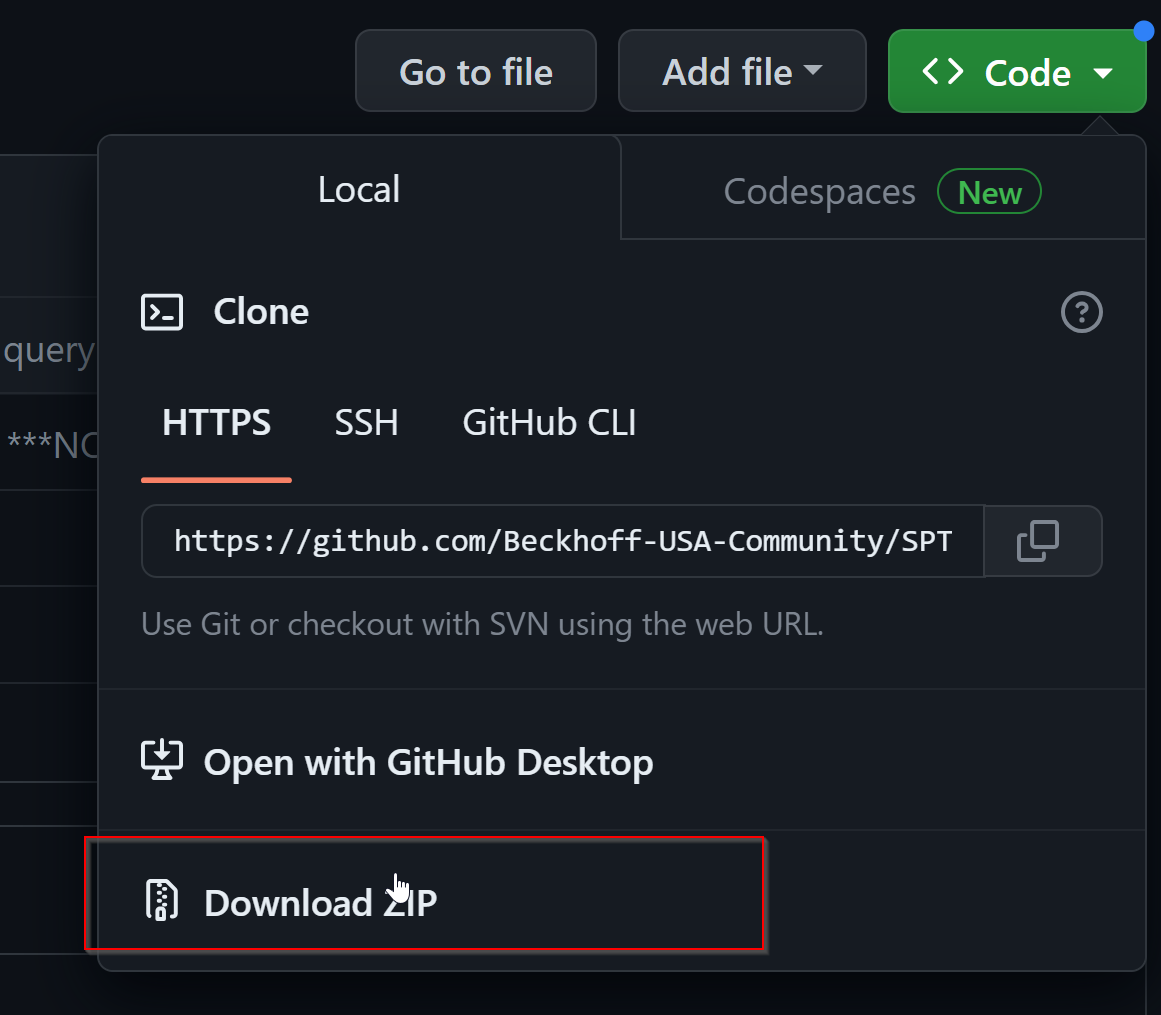
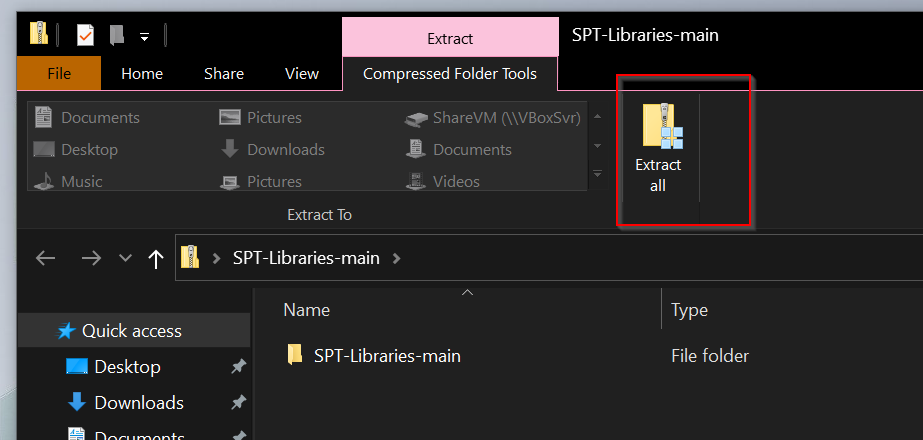
DownloadされたZIPを解凍します。
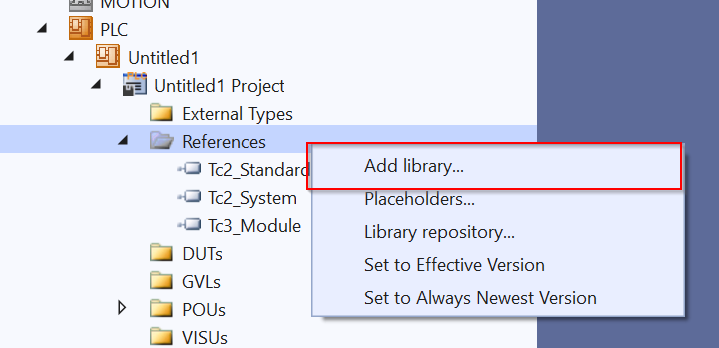
Add Library
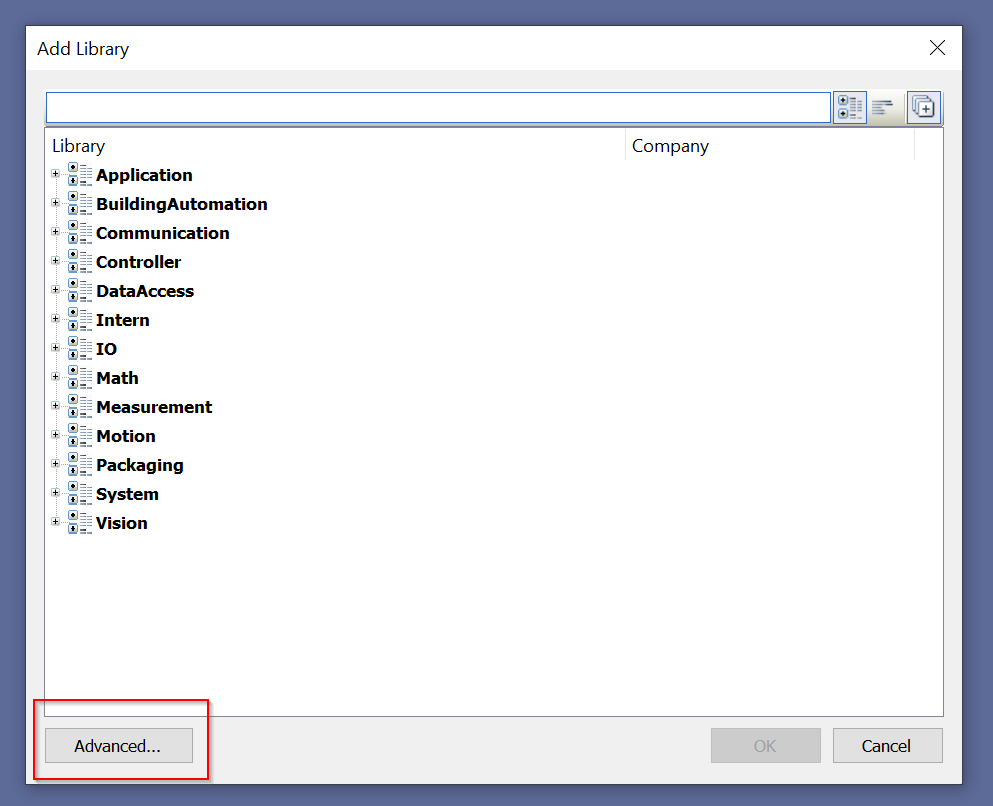
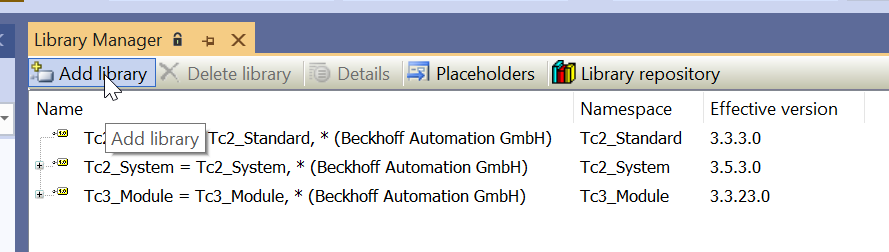
SPTライブラリを追加するため、References>Add Libraryします。
Advancedボタンをクリックします。
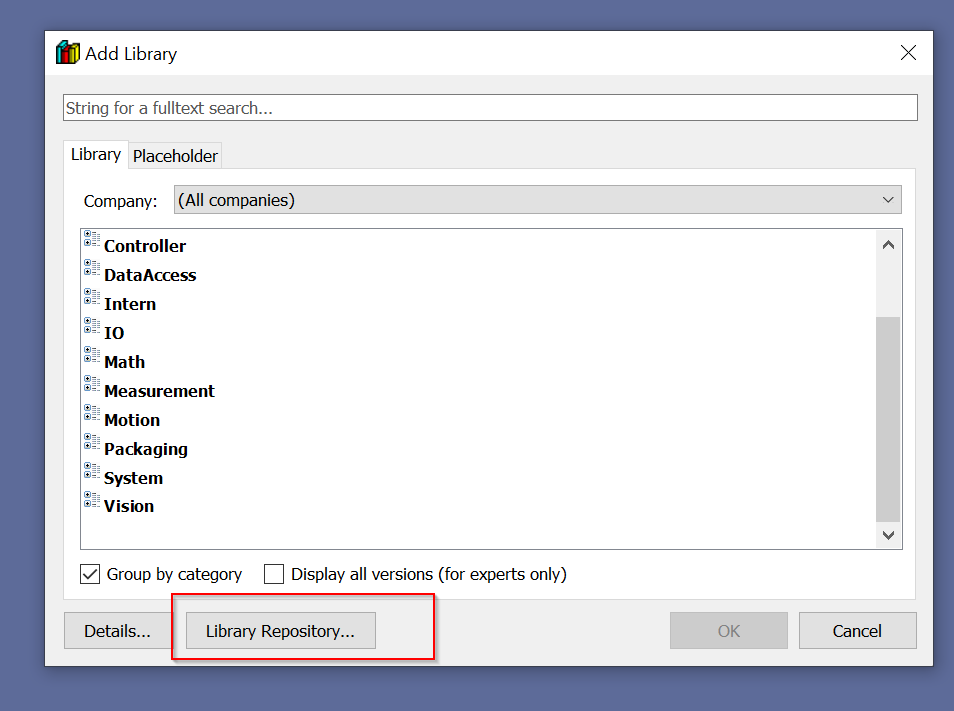
Library Respository..を開きます。
Library Respositoryの設定画面が表示されました。
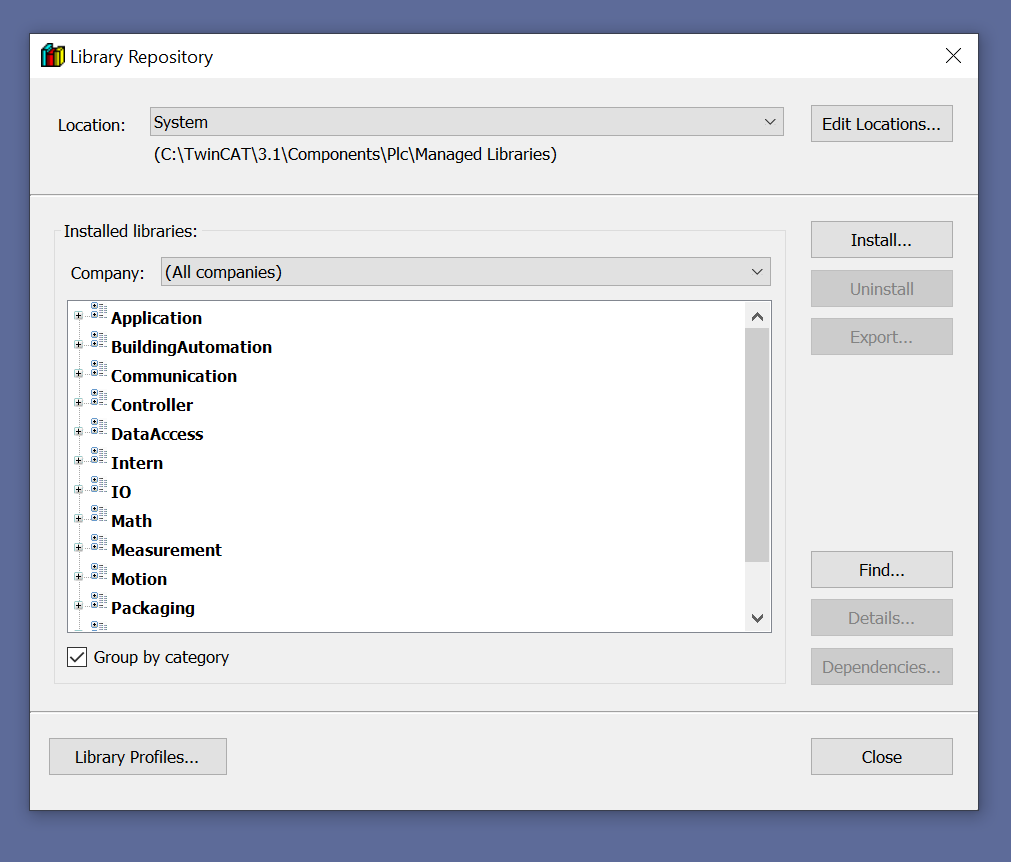
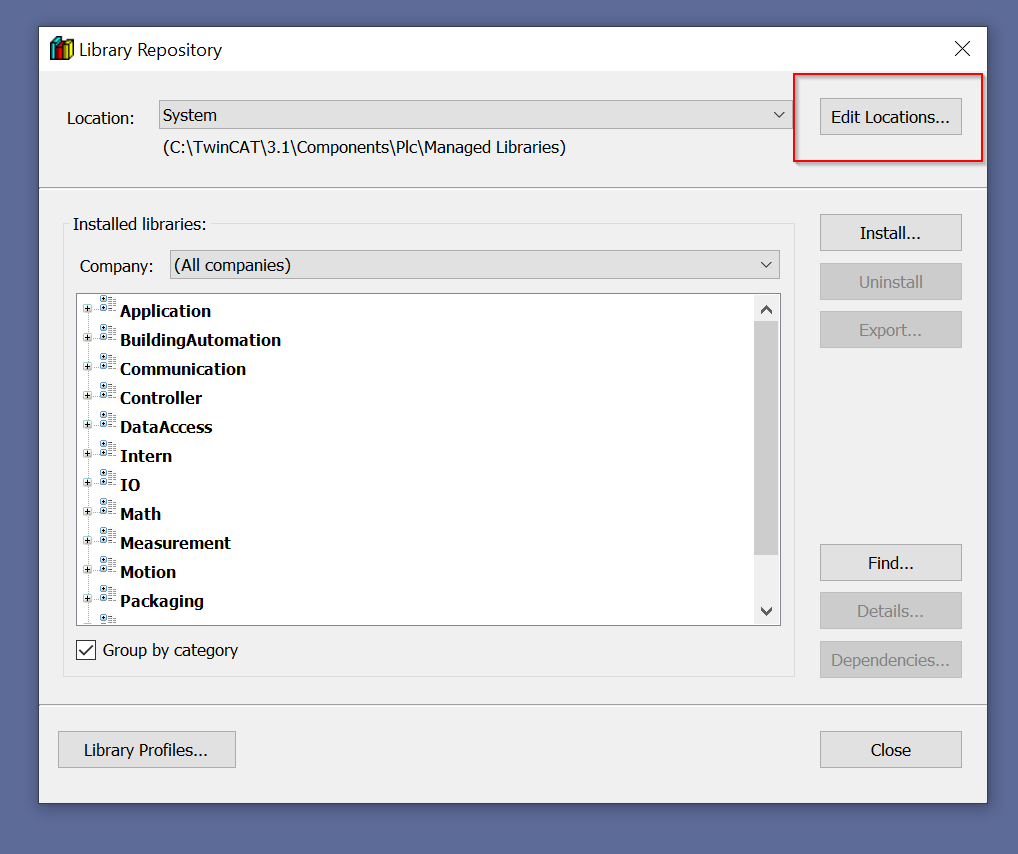
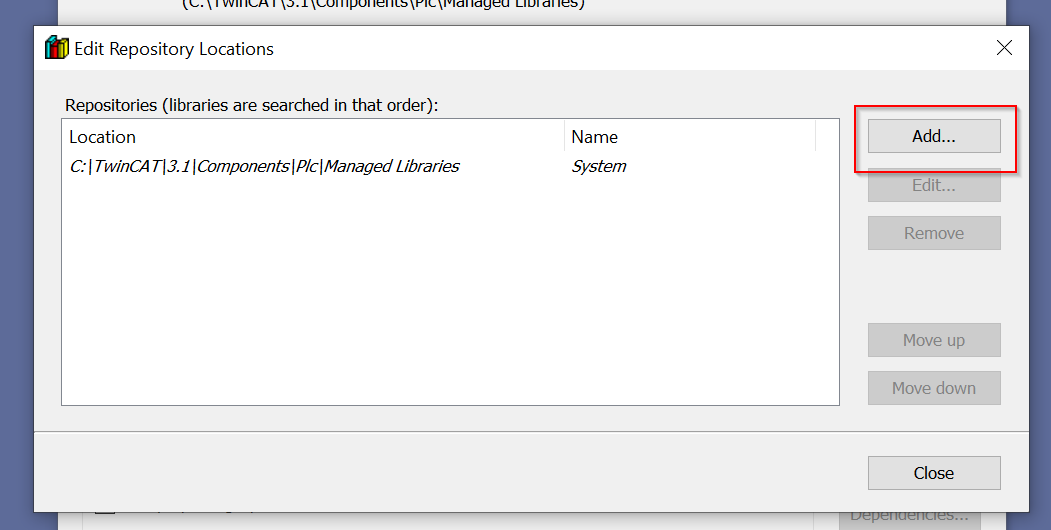
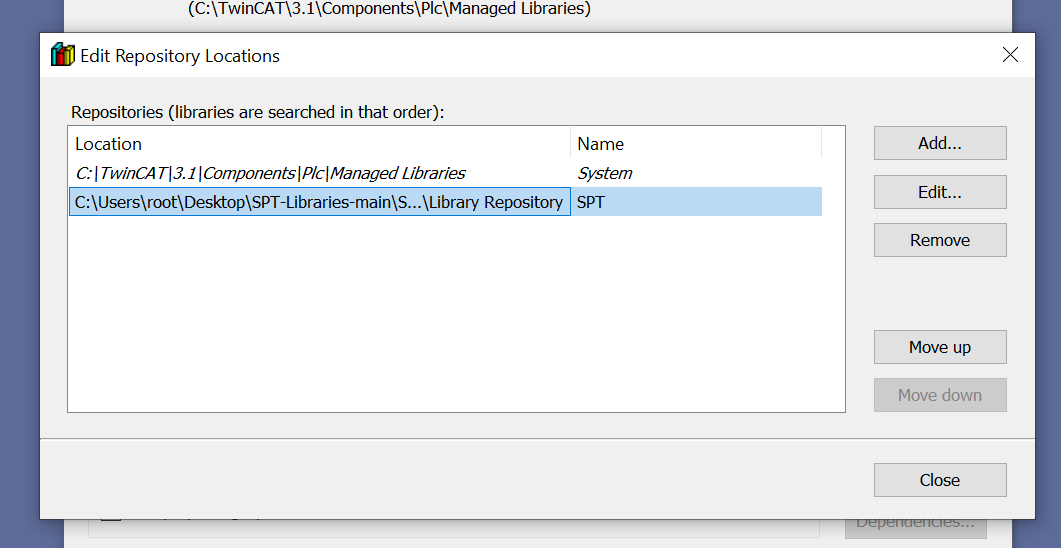
Edit LocationsをクリックしLibraryの格納Locationを追加します。
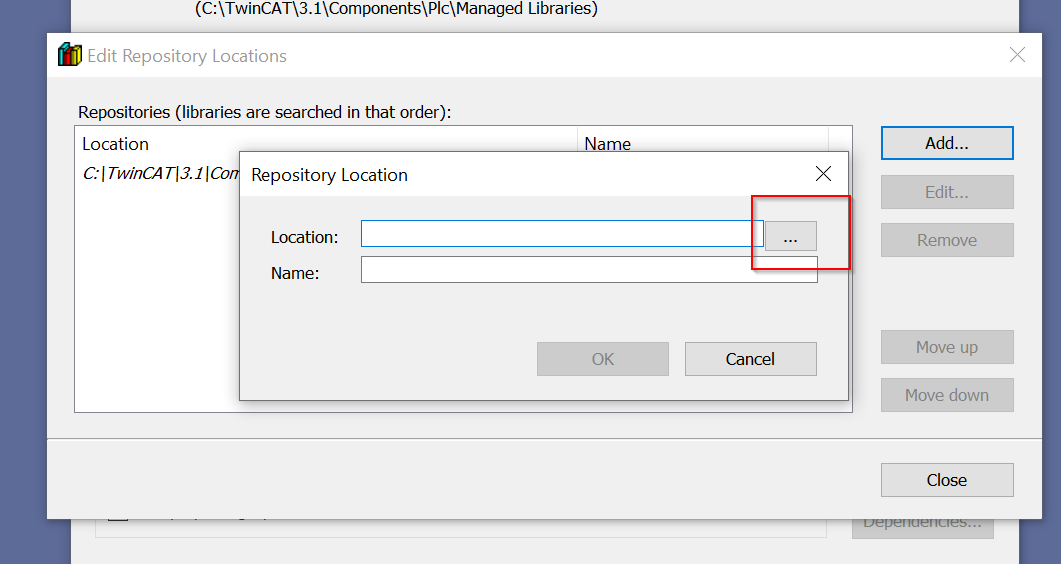
Add で新しいライブラリを追加します。
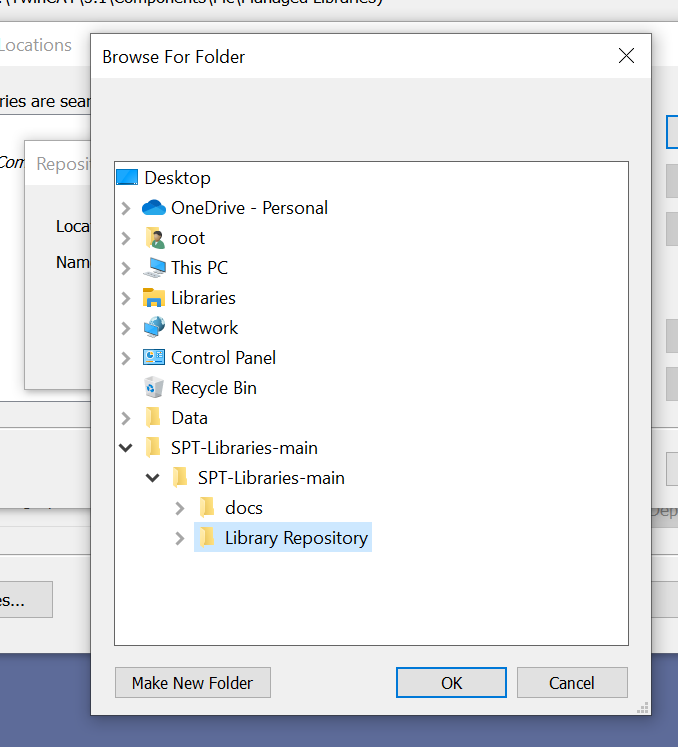
…をクリックします。
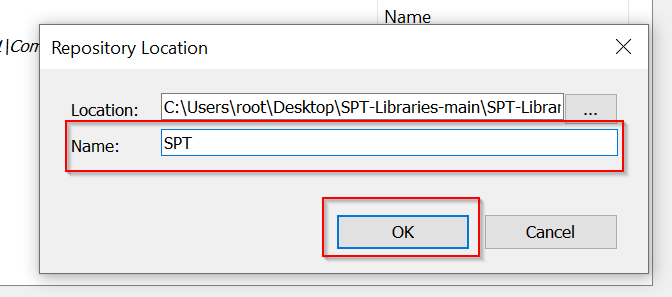
先程GithubからDownloadされたライブラリにSPT-Libraries-main>Library Repositoryを指定します。
Nameは特に指定する必要がありませんが、今回は仮にSPTにします。
Done!
CompanyにBeckhoff Automation LLC(つまりBeckhoff USA)が作ったライブラリが見えました。
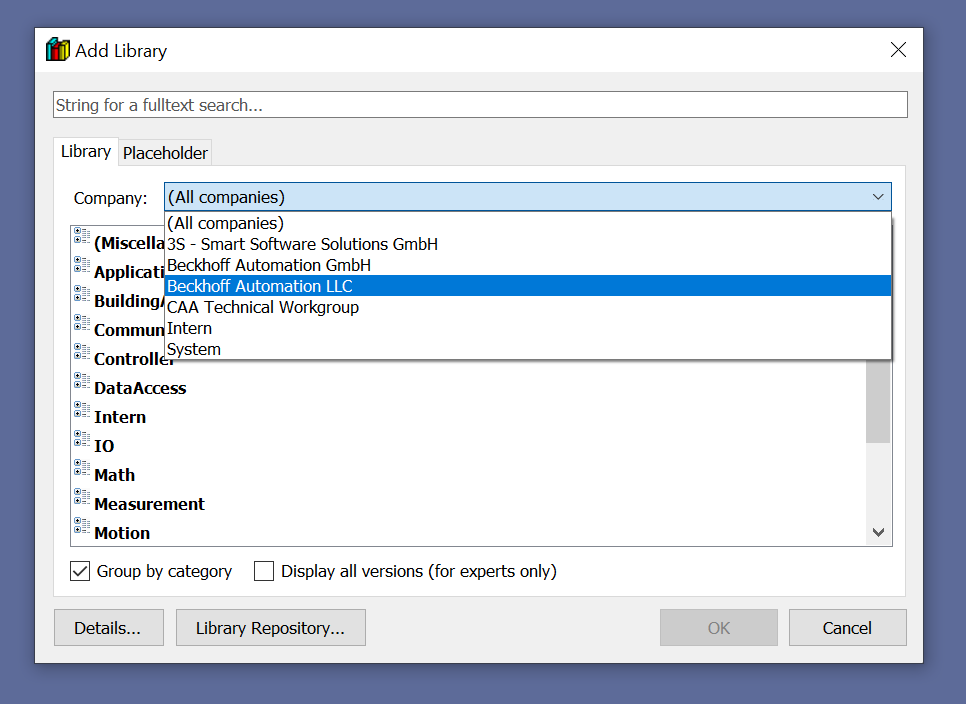
中にSPT Driversなどのライブラリがあります。
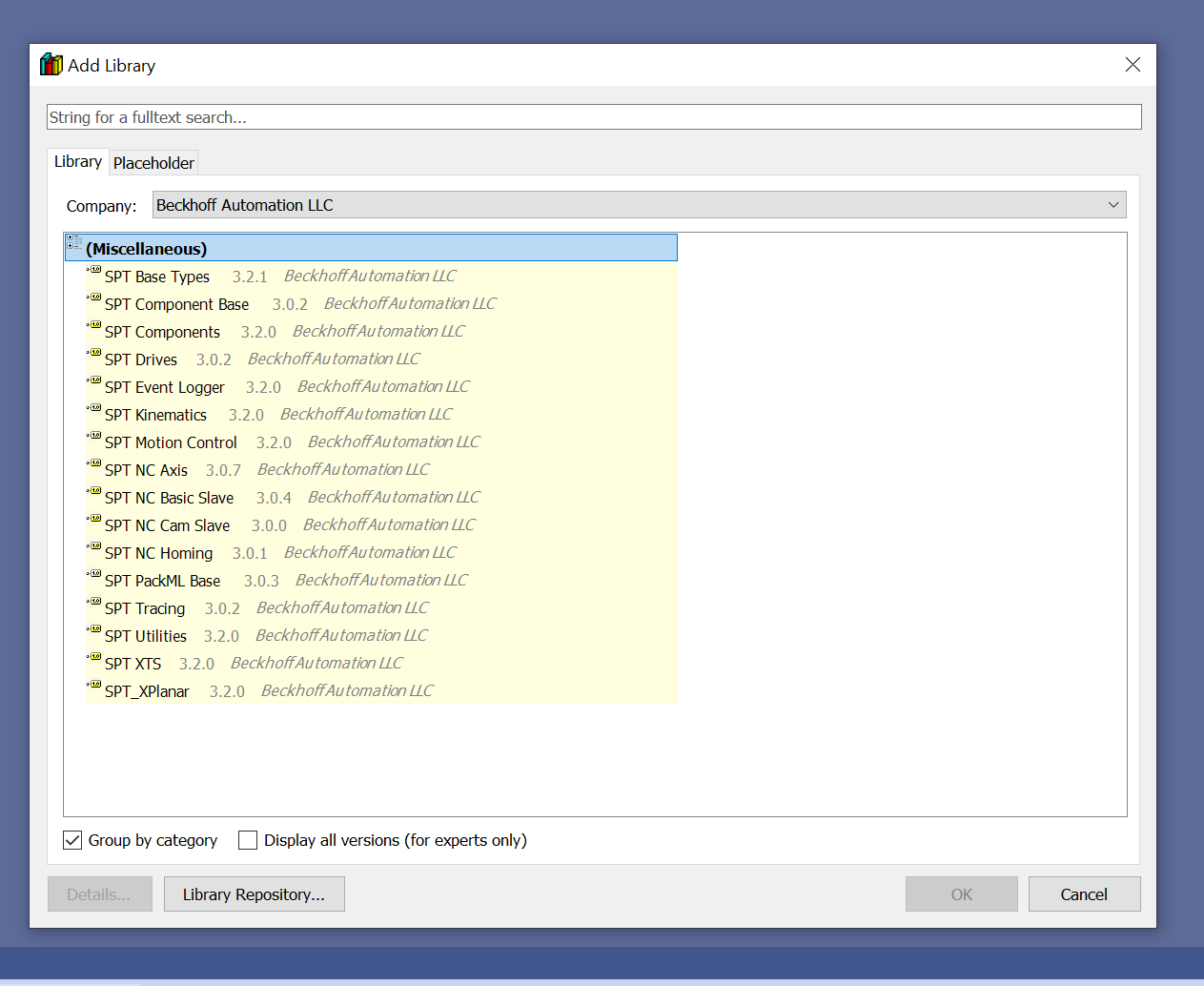
あとはAdd Libraryを使ってSPT ライブラリをプロジェクトに追加すればOKです。
Implementation1
最初にFB_SingleSolenoidを紹介します。
FB_SingleSolenoid
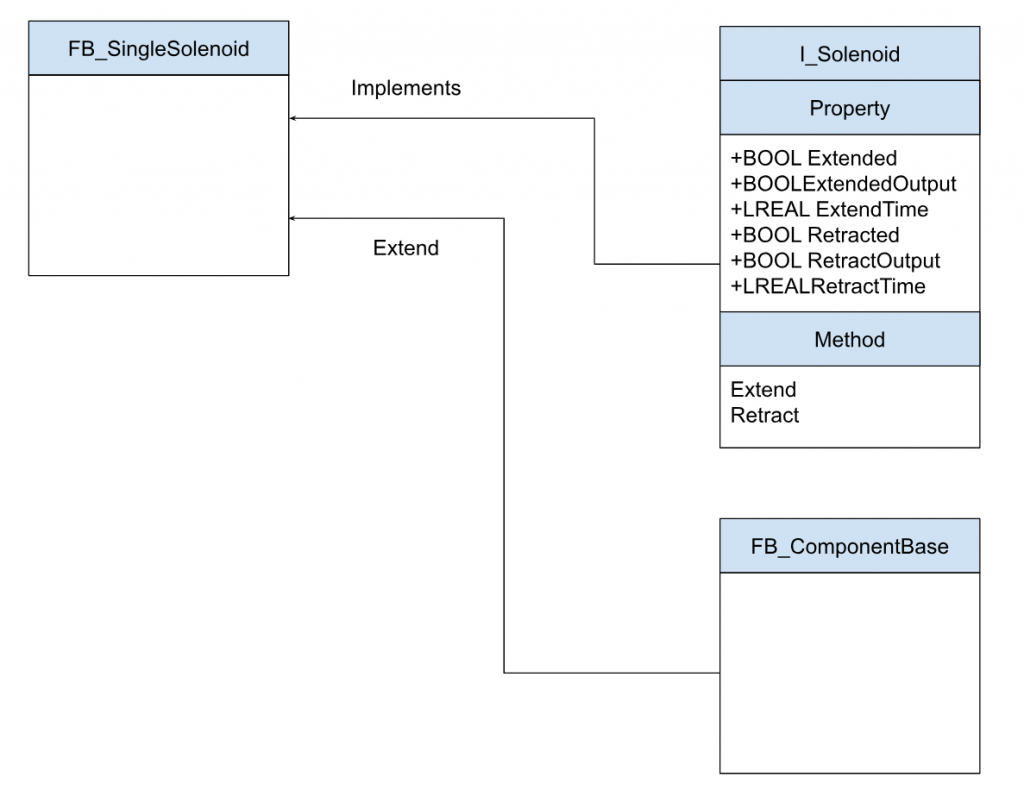
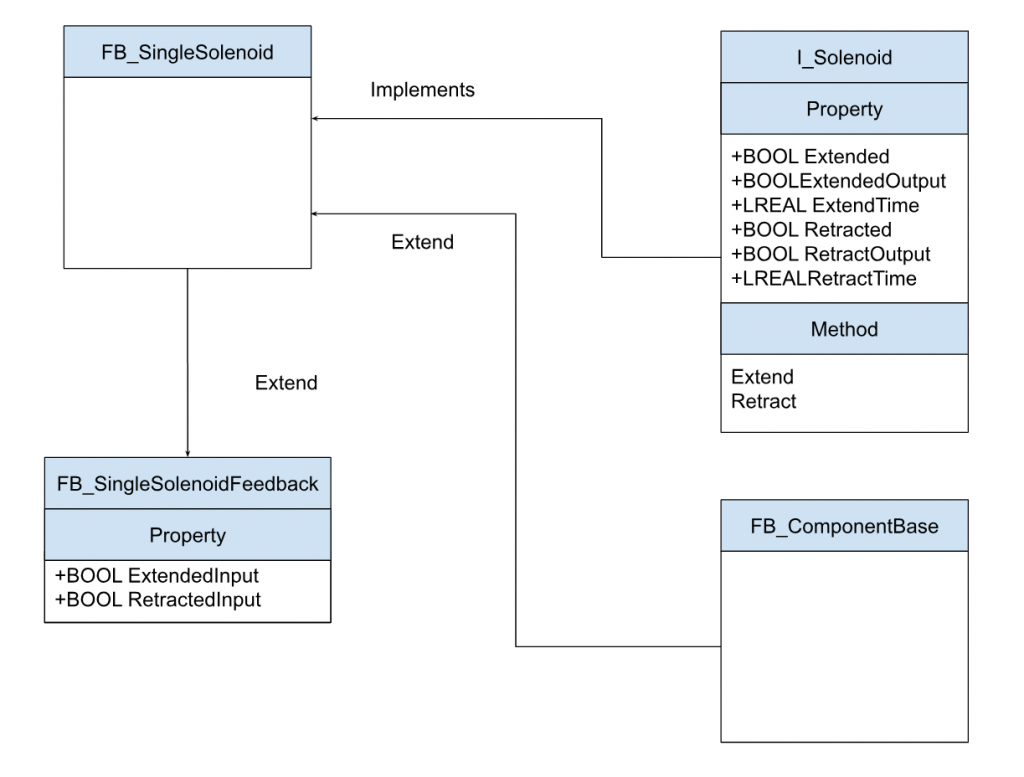
FB_SingleSolenoidは単一のソレノイド(オン => EXTENDコマンド)とフィードバックなしのシリンダを表Function Blockになります。
- extends FB_ComponentBase
- implements I_Solenoid
こちらはFB_SingleSolenoidの図になります。
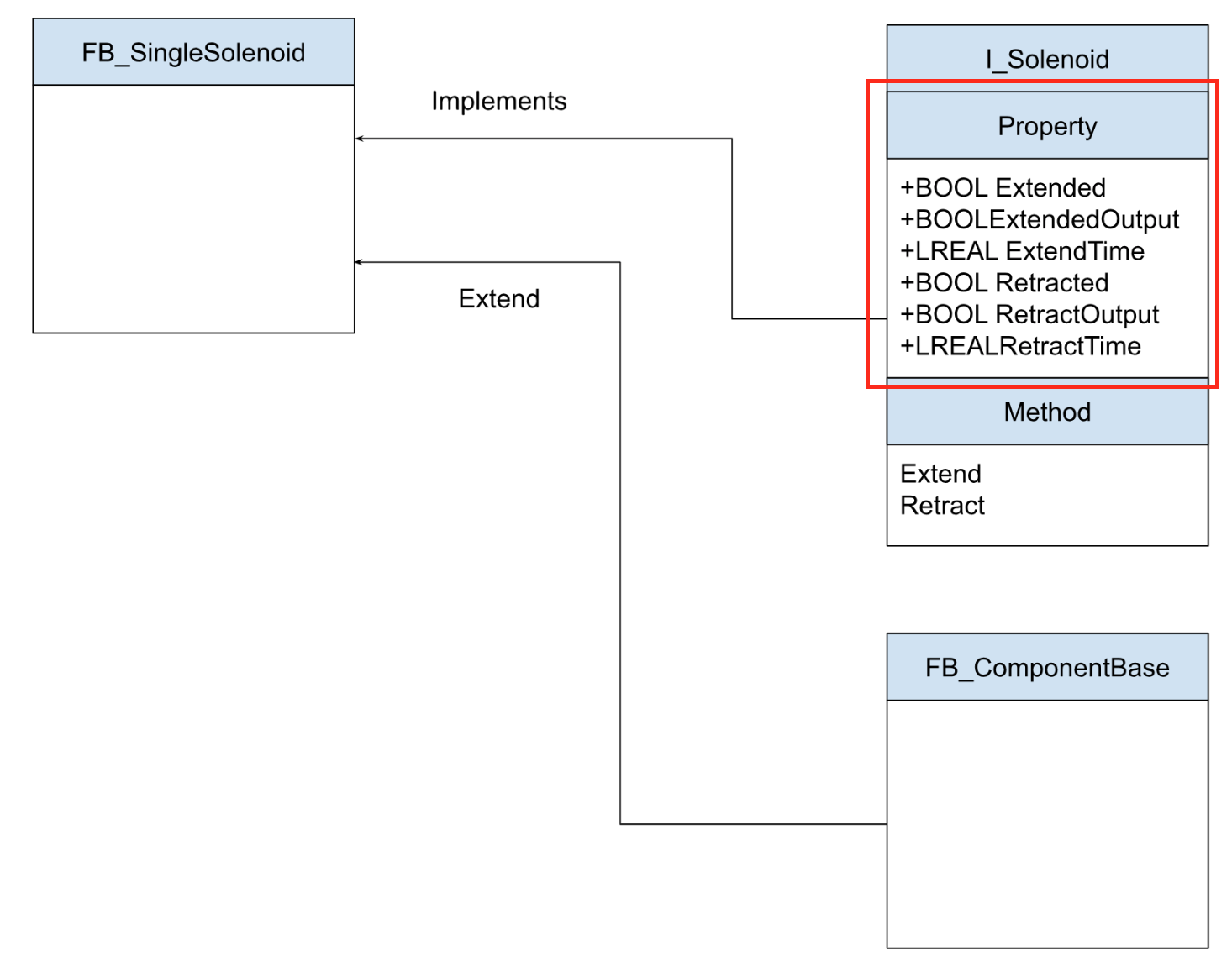
Properties
こちらはFB_SingleSolenoidのPropertyの説明になります。
- R=読み
- W=書き込む
| Property名 | データ・タイプ | アクセス | 用途 |
| Extended | BOOL | R | TRUE=シリンダーがEXTENDされていた |
| ExtendedOutput | BOOL | R | TRUE=EXTENDコマンド発行中 |
| ExtendTime | LREAL | RW | EXTENDのタイムアウト時間の取得/設定(ミリ秒単位) |
| Retracted | BOOL | R | TRUE=シリンダーがRetractedしていた |
| RetractOutput | BOOL | R | TRUE=Retractedコマンド発行中 |
| RetractTime | LREAL | RW | retractのタイムアウト時間の取得/設定(ミリ秒単位) |
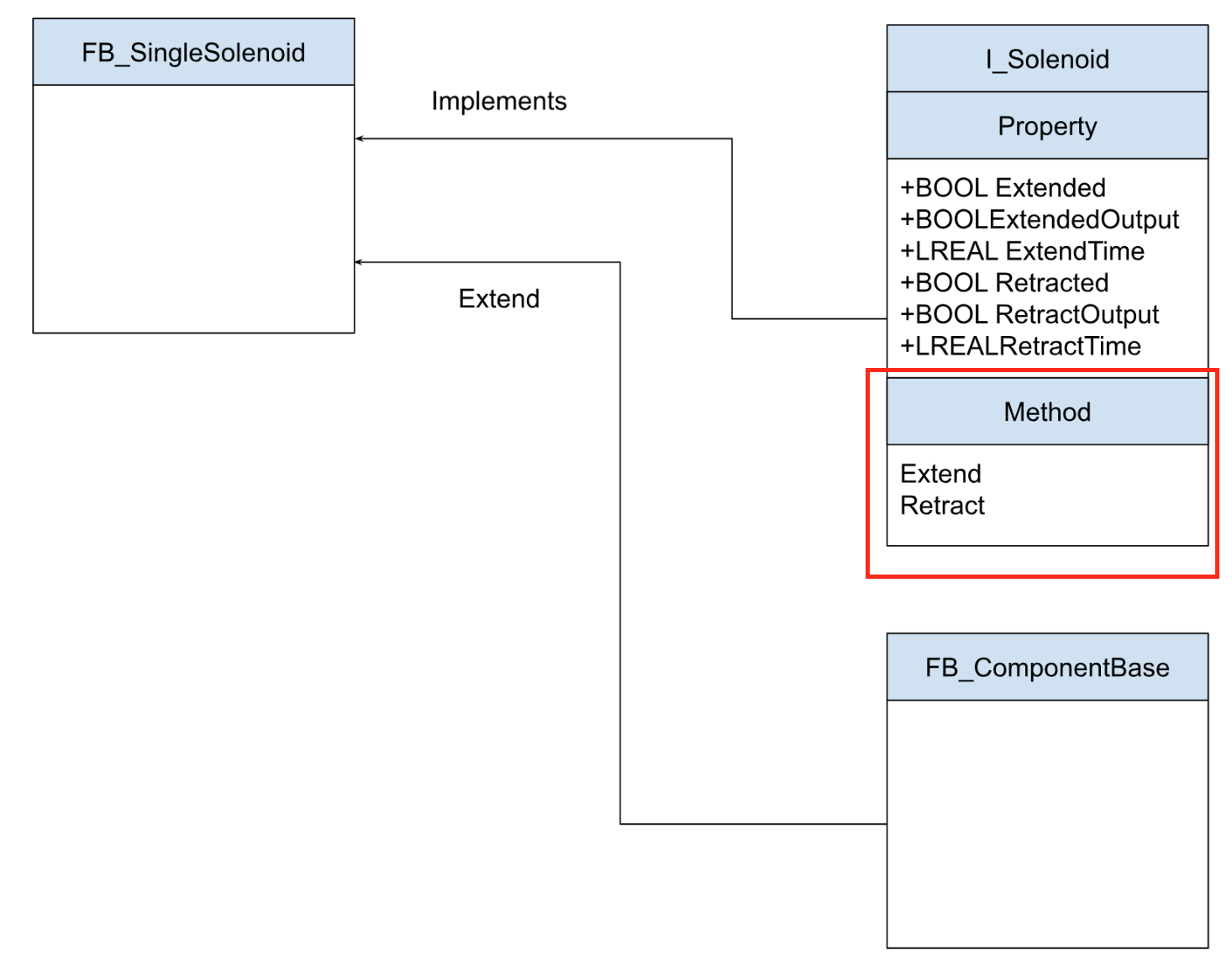
Methods
こちらはFB_SingleSolenoidのPropertyの説明になります。
| Method名 | 戻り値データ・タイプ | 用途 |
| Extend | null | シリンダーをExtend出力するコマンド |
| Retract | null | シリンダーをRetract出力するコマンド |
MAINプログラム
次はTwinCAT3でプログラムを作成しましょう。
GVL
こちらはシステムを手動モードに指定するか設定する変数です。
| VAR_GLOBAL xManualMode:BOOL; END_VAR |
GVL_OPCUA
こちらはFactory IOのOPC UA Serverと接続するための変数です。
| {attribute ‘qualified_only’} VAR_GLOBAL {attribute ‘OPC.UA.DA’ := ‘1’} qReturn:BOOL; END_VAR |
VAR
こちらはImplementation1で使用した変数になります。
- Pusher0はFB_SingleSolenoidのInstanceです。
- xExtendCmdは手動モードではないとき、Pusher0をExtendComd発行できます。
- xManualModeはPusher0を手動モードに切り替えます。
| PROGRAM MAIN VAR Pusher0:FB_SingleSolenoid; xExtendCmd:BOOL; xManualMode:BOOL; test1:LREAL; END_VAR |
Code
こちらはPusher0の制御部分になります。
| Pusher0.Name:=’Pusher0′; Pusher0.CyclicLogic(); IF xManualMode THEN Pusher0.AllowHMIControl(); ELSE Pusher0.BlockHMIControl(); END_IF; IF NOT xManualMode THEN IF xExtendCmd THEN Pusher0.Extend(); ELSE Pusher0.Retract(); END_IF END_IF; GVL_OPCUA.qReturn:= Pusher0.Extended; |
Pusher0.Name:=’Pusher0′;
Pusher0のデバイス名を設定します。
Pusher0.CyclicLogic();
Pusher0の周期ロジックプログラムを有効にします。
Pusher0.Extend();/Pusher0.Retract();
Pusher0のExtendやRestractコマンドを手動モード以外のときに発行するMethodを呼び出し
ます。
GVL_OPCUA.qReturn:=Pusher0.Extended;
Pusher0の出力状態をFactoryIOに反映させます。
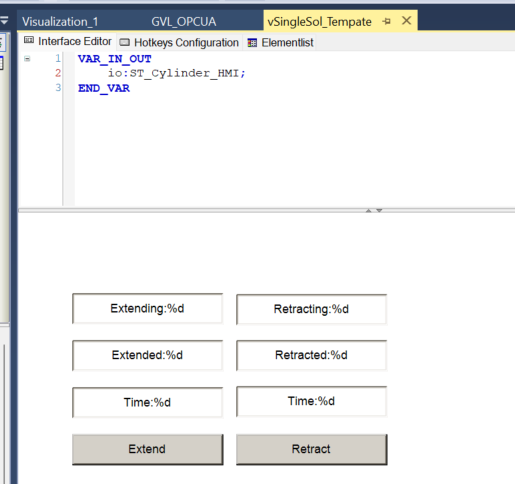
Visualization
こちらは画面です。
Result
こちらの動画はFB_SingleSolenoidとFactoryIOを連携した動画です。
Beckhoff.Playing FB_SingleSolenoid and Factory IO
Imeplementation2
次はFB_SingleSolenoidFeedbackを紹介します。
FB_SingleSolenoidFeedback
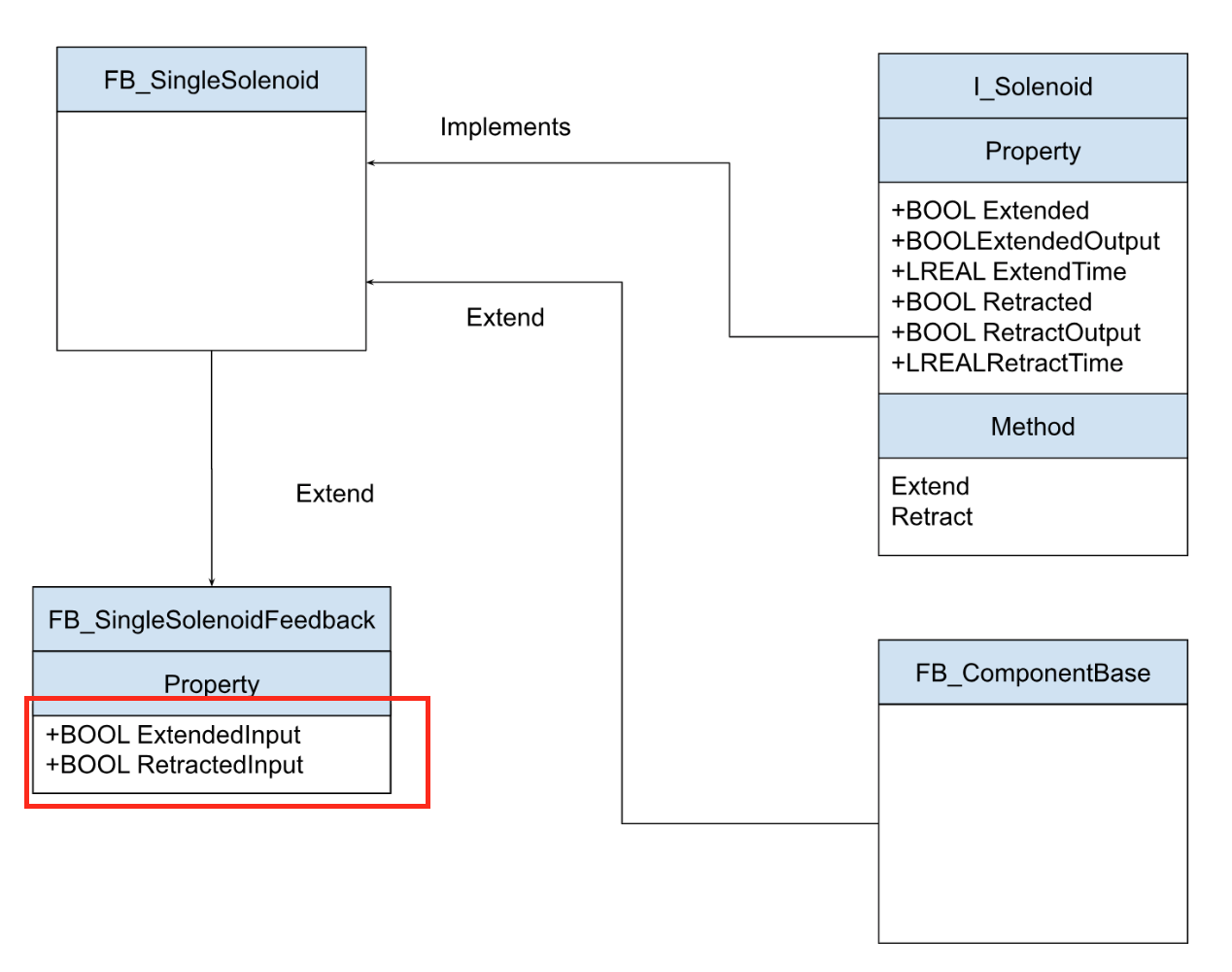
FB_SingleSolenoidFeedbackは単一のソレノイド(オン =>EXTENDコマンド)と、extended/retractedを示すフィードバック・デバイスを持つシリンダを表すラFunction Blockになります。また、アクチュエータの実際の状態がタイムアウト時間よりも長く異なる場合にスローされるアラーム機能を含みます。
- extends FB_SingleSolenoid
こちらがFB_SingleSolenoidFeedbackの図になります。
Properties
こちらはFB_SingleSolenoidFeedbackのPropertyの説明になります。
- R=読み
- W=書き込む
| Property名 | データ・タイプ | アクセス | 用途 |
| ExtendedInput | BOOL | W | EXTENDEDフィードバック装置の状態設定 |
| RetractedInput | BOOL | W | RETRACTEDフィードバック装置の状態設定 |
MAINプログラム
次はTwinCAT3でプログラムを作成しましょう。
GVL_OPCUA
こちらはFactory IOのOPC UA Serverと接続するための変数です。
| {attribute ‘qualified_only’} VAR_GLOBAL {attribute ‘OPC.UA.DA’ := ‘1’} qReturn:BOOL; {attribute ‘OPC.UA.DA’ := ‘1’} iSignleSolExtFeedback:BOOL; {attribute ‘OPC.UA.DA’ := ‘1’} iSignleSolRetFeedback:BOOL; {attribute ‘OPC.UA.DA’ := ‘1’} qSignleSolCoomand:BOOL; END_VAR |
VAR
こちらはImplementation2で使用した変数になります。
- Pusher2はFB_SingleSolenoidFeedbackのInstanceです。
- xExtendCmdは手動モードではないとき、Pusher0をExtendComd発行できます。
- xManualModeはPusher2を手動モードに切り替えます。
- 今回の記事では実機がありませんので、xSimはPusher2をSimulation Modeに振り返るためのデバイス
| PROGRAM pSingleSolWithFeedback VAR Pusher2:FB_SingleSolenoidFeedback; xManualMode:BOOL; xSim:BOOL; xGO:BOOL; END_VAR |
Code
こちらはPusher2の制御部分になります。
| xManualMode:=GVL.xManualMode; Pusher2.Name:=’Pusher2′; Pusher2.CyclicLogic(); Pusher2.InSimulation:=xSim; Pusher2.ExtendedInput:=GVL_OPCUA.iSignleSolExtFeedback; Pusher2.RetractedInput:=GVL_OPCUA.iSignleSolRetFeedback; IF xManualMode THEN Pusher2.AllowHMIControl(); ELSE Pusher2.BlockHMIControl(); END_IF; IF NOT xManualMode THEN IF xGO THEN Pusher2.Extend(); ELSE Pusher2.Retract(); END_IF END_IF; GVL_OPCUA.qSignleSolCoomand:= Pusher2.Extended; |
Pusher2.Name:=’Pusher2′;
Pusher2のデバイス名を設定します。
Pusher2.CyclicLogic();
Pusher2の周期ロジックプログラムを有効にします。
Pusher2.InSimulation:=xSim;
Pusher2をSimulationモードに切り替えます。
Pusher0.Extend();/Pusher0.Retract();
Pusher0のExtendやRestractコマンドを手動モード以外のときに発行するMethodを呼び出し
ます。
Pusher2.ExtendedInput:=GVL_OPCUA.iSignleSolExtFeedback;
FactoryIOのSensorシミュレーション状態をOPC UA経由でTwinCAT3にFeedbackします。
GVL_OPCUA.qReturn:=Pusher2.Extended;
Pusher2の出力状態をFactoryIOに反映させます。
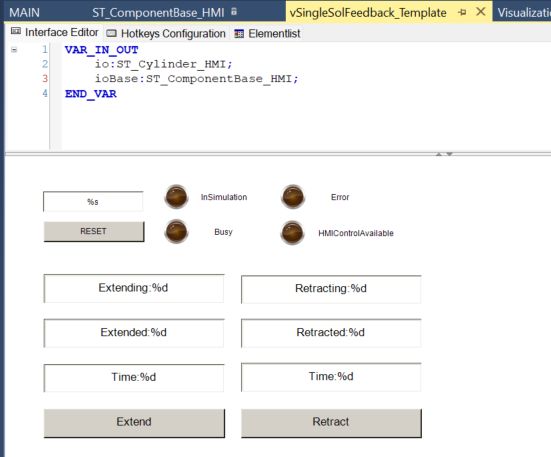
Visualization
SPT FrameworkにあるHMI機能を活かすため、VisualizationにSPT FrameworkのHMI構造体をパラメータとして使用し、Templateを作成します。
Result
こちらの動画はFB_SingleSolenoidFeedbackとFactoryIOを連携した動画です。