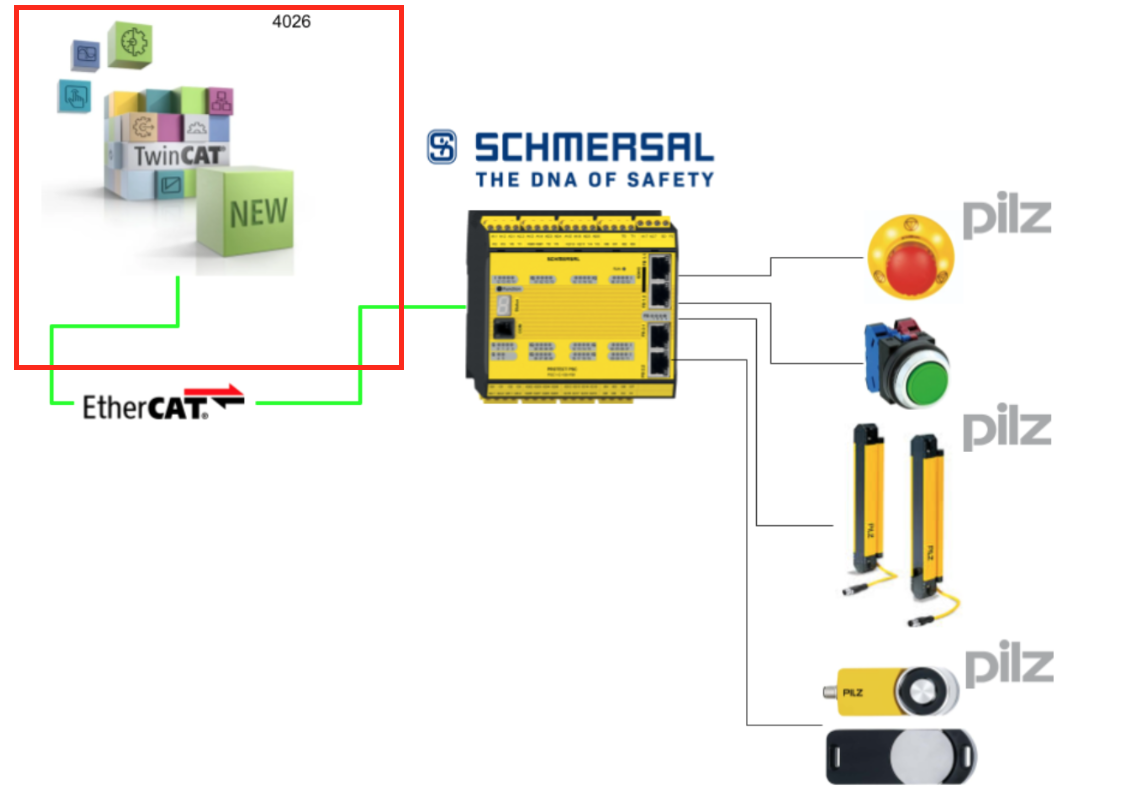
こちらは新しいシリーズで、Schmersal社のPSC1-C-100-FB1 Safety Controllerを利用し様々な記事を展開していきます。第7話はBeckhoff TwinCAT3とEtherCAT経由でデータ交換します。
さ、FAを楽しもう。

Reference Video
Schmersal.PSC1-C-100-FB1 開封しました!
Reference Link
http://soup01.com/ja/category/schmersal_jp/psc1/
前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
現在、私達の活動はほぼ無償で続けており、より多くのコンテンツを提供するためには、皆様の温かいご支援が大変重要です。もし可能であれば、以下のリンクから応援していただけると大変嬉しく思います。
高橋クリスのメンバーシップ
こちらはFullさん(full@桜 八重 (@fulhause) / X)と共にやっているラジオにメンバーシップを登録いただけます。
https://note.com/fulhause/membership/join
AMAZON ギフトリスト
こちらは自分のブログのコンテンツ制作や設備の充実に大いに役立てさせていただきます。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon
こちらは自分のブログのコンテンツ制作や設備の充実に対する小さな応援の気持ちのPatreonです。
https://www.patreon.com/user?u=84249391
皆様のサポートが、私たちの活動をより充実させる力となります。
どうぞよろしくお願いします。
メールアドレス(*=@)
X
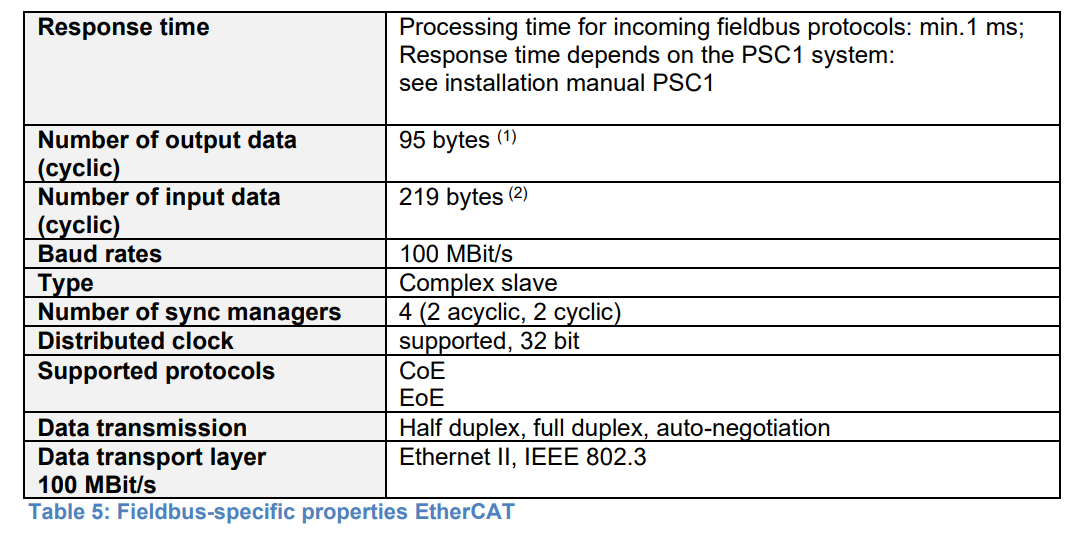
EtherCAT
こちらはSchmersal社のPSC1-C-100-FB1 Safety ControllerのEtherCAT Slave仕様になります。
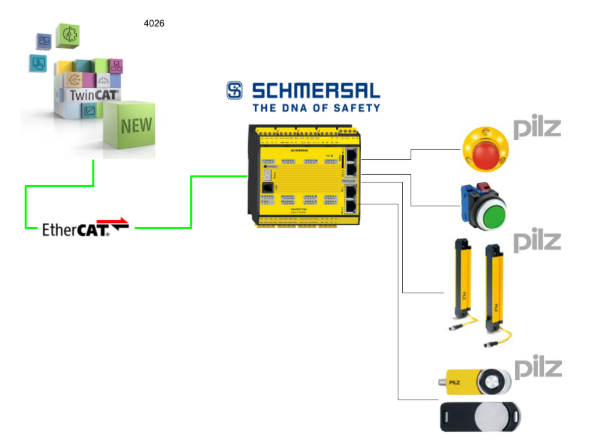
Implementation
こちらは今回の記事の構成です。
Schmersal Side
最初にSchmersal側を構築していきます。

Configure EtherCAT Slave
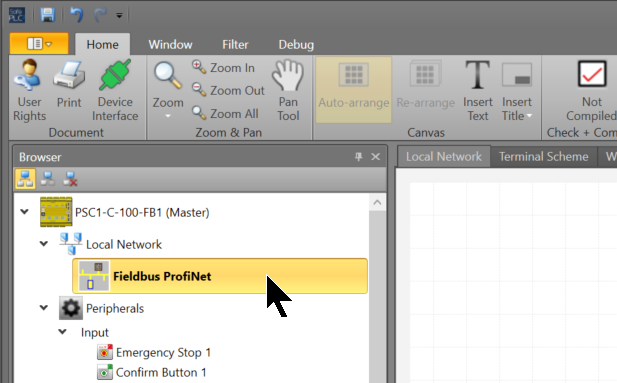
PSC1-C-100-FB1 Safety ControllerでEtherCAT Interfaceを有効にするために、コントローラーをクリックします。
Properties画面にあるLocal Network>FieldbusのCheckboxを入れます。
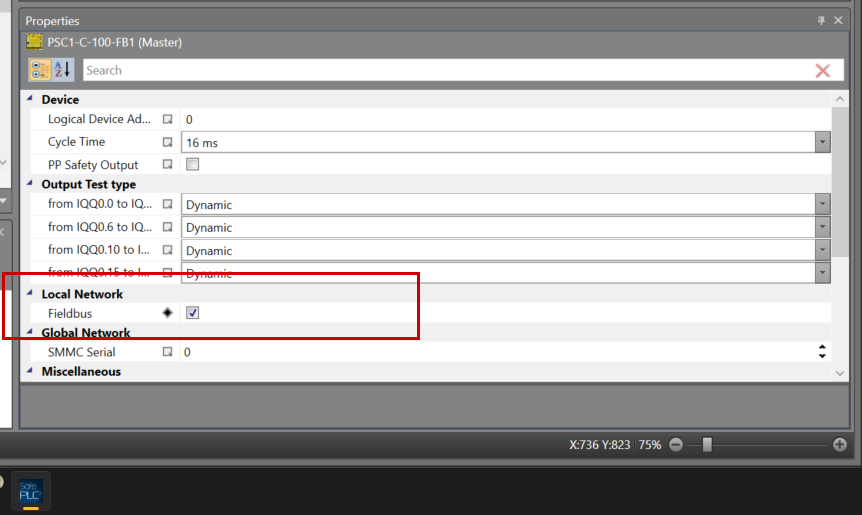
プロジェクトのLocal Network TabにFieldbusの表示が増えます。
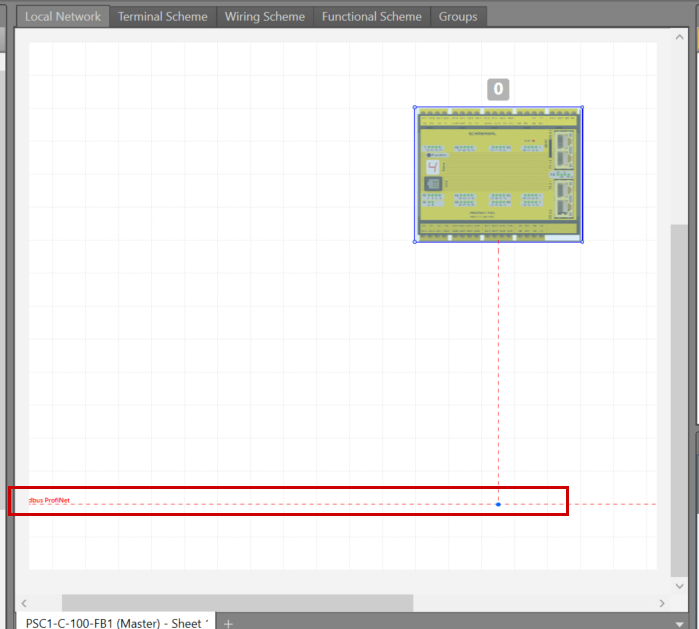
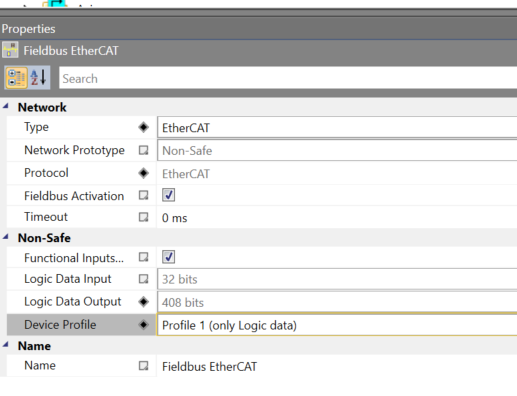
次はLocal Network>Fieldbusをクリックします。
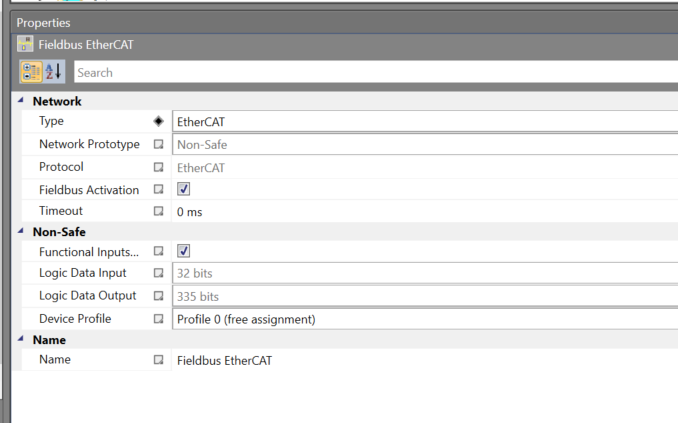
Properties>Network>TypeでEtherCATを設定します。
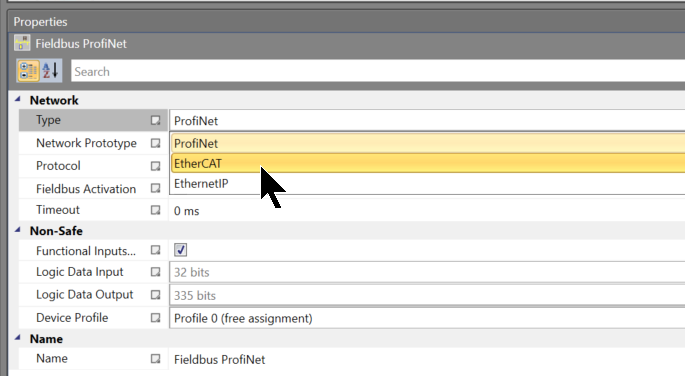
Done!
今回記事で使用したDevice ProfileはProfile 1 (Only logic data)になります。
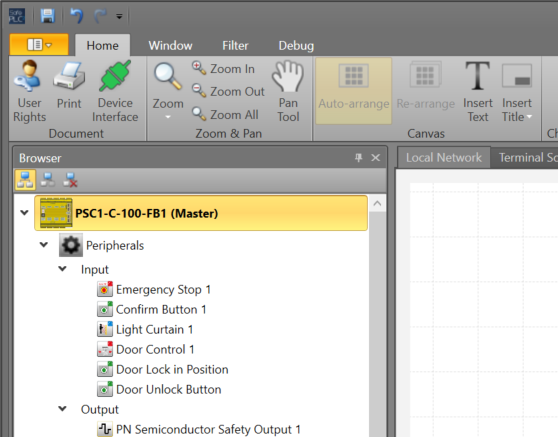
Safety Program
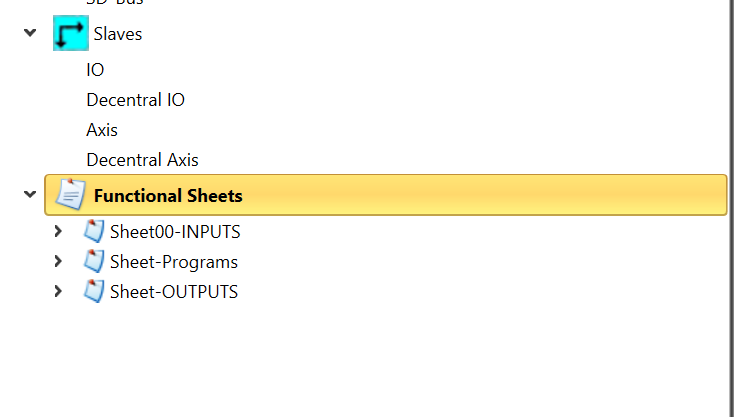
次は安全プログラムを作成します。前回のPart6記事に続き、プログラムをわかりやすく分類するために機能ことにFunctional Sheetsを作成します。
- Sheet00-INPUTS;入力データをまとめるSheetです。
- Sheet-Programs;Door Lockなどのロジックが含まれたSheetです。
- Sheet-OUTPUTS:出力をまとめるSheetです。
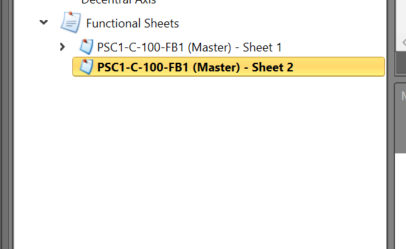
Sheetを追加するにはFunctional Sheets>右クリック>Add New Sheetしてください。
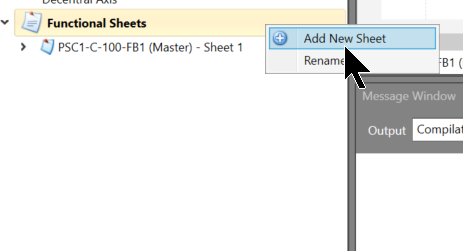
Done!
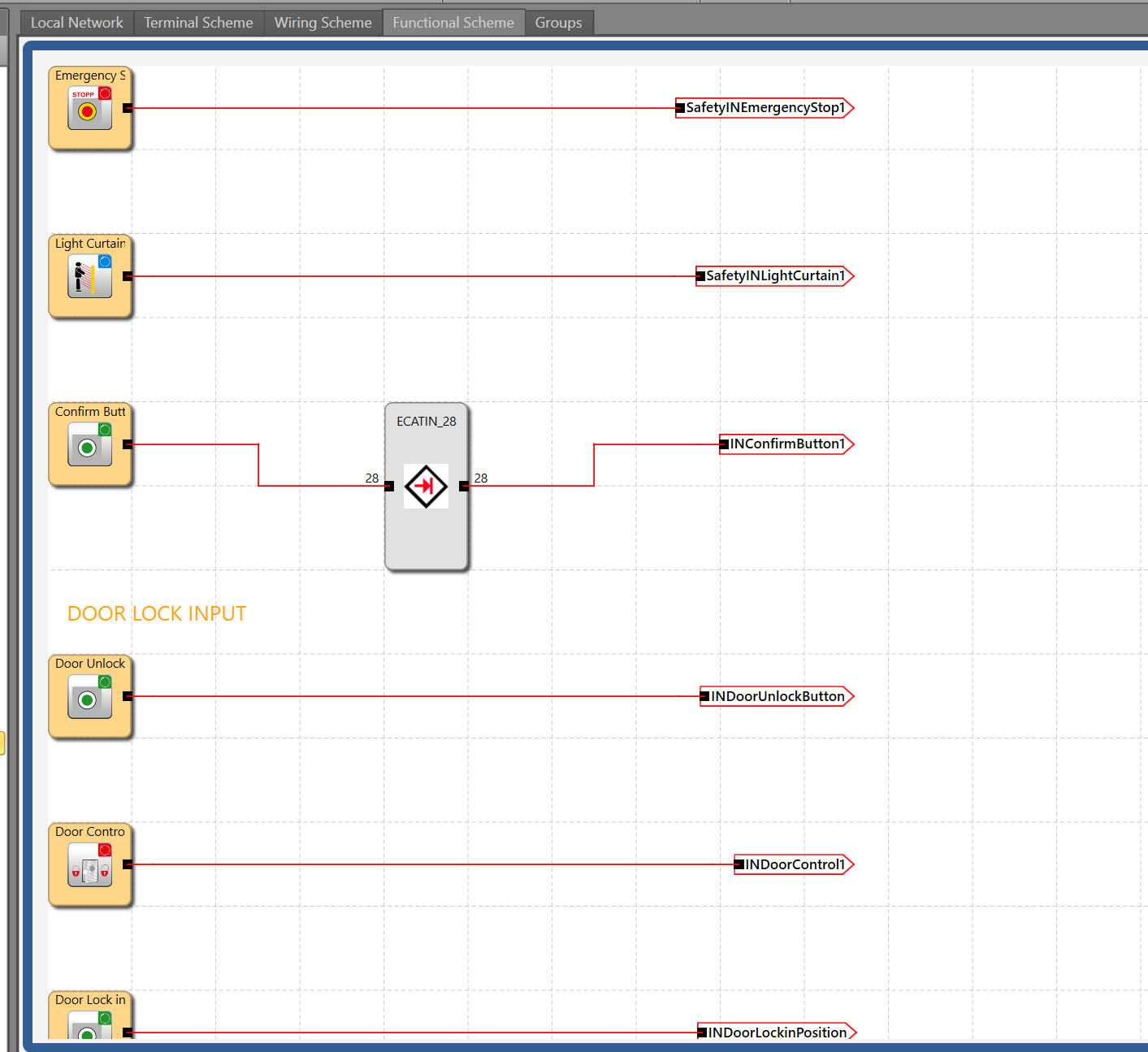
Sheet-INPUTS
Sheet-INPUTSは各安全・非安全入出力とEtherCAT Fieldbus経由で受信したリセット可能信号を異なるTerminalに転送します。
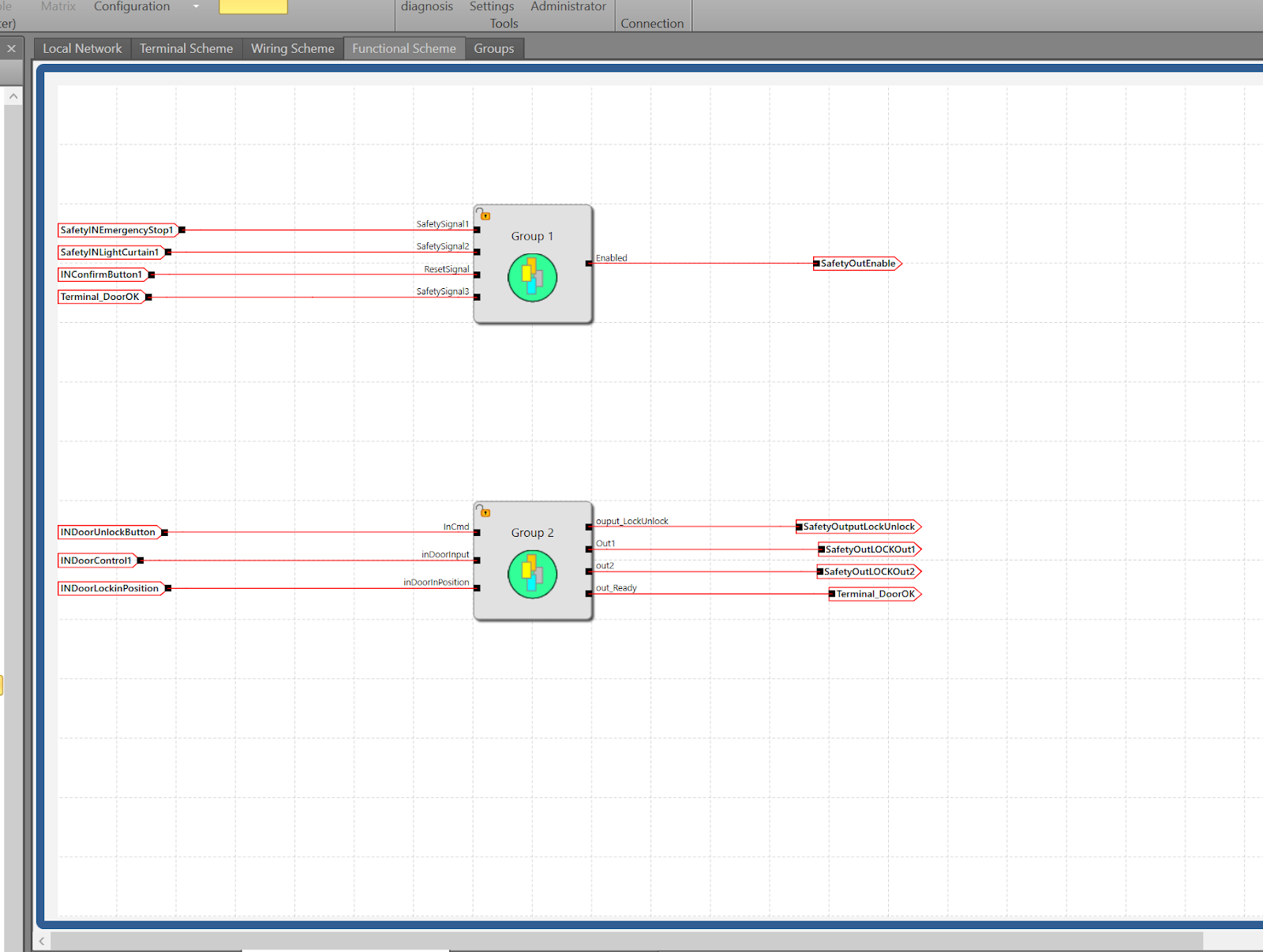
Sheet-Programs
Sheet-Programsは安全入力から転送してきたTerminalを利用し、異なる安全ロジックを実行します。また、出力データをTerminalに転送します。
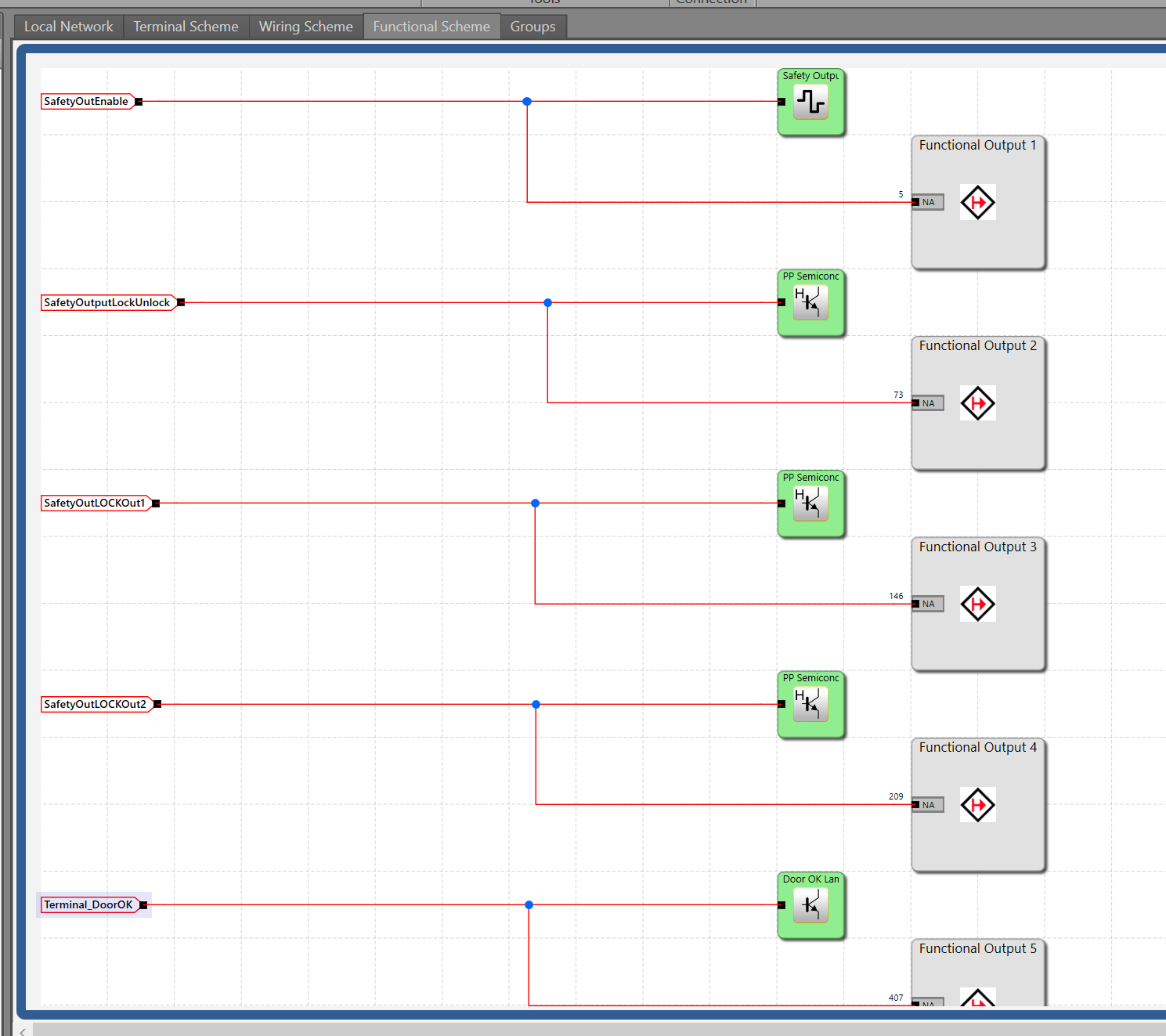
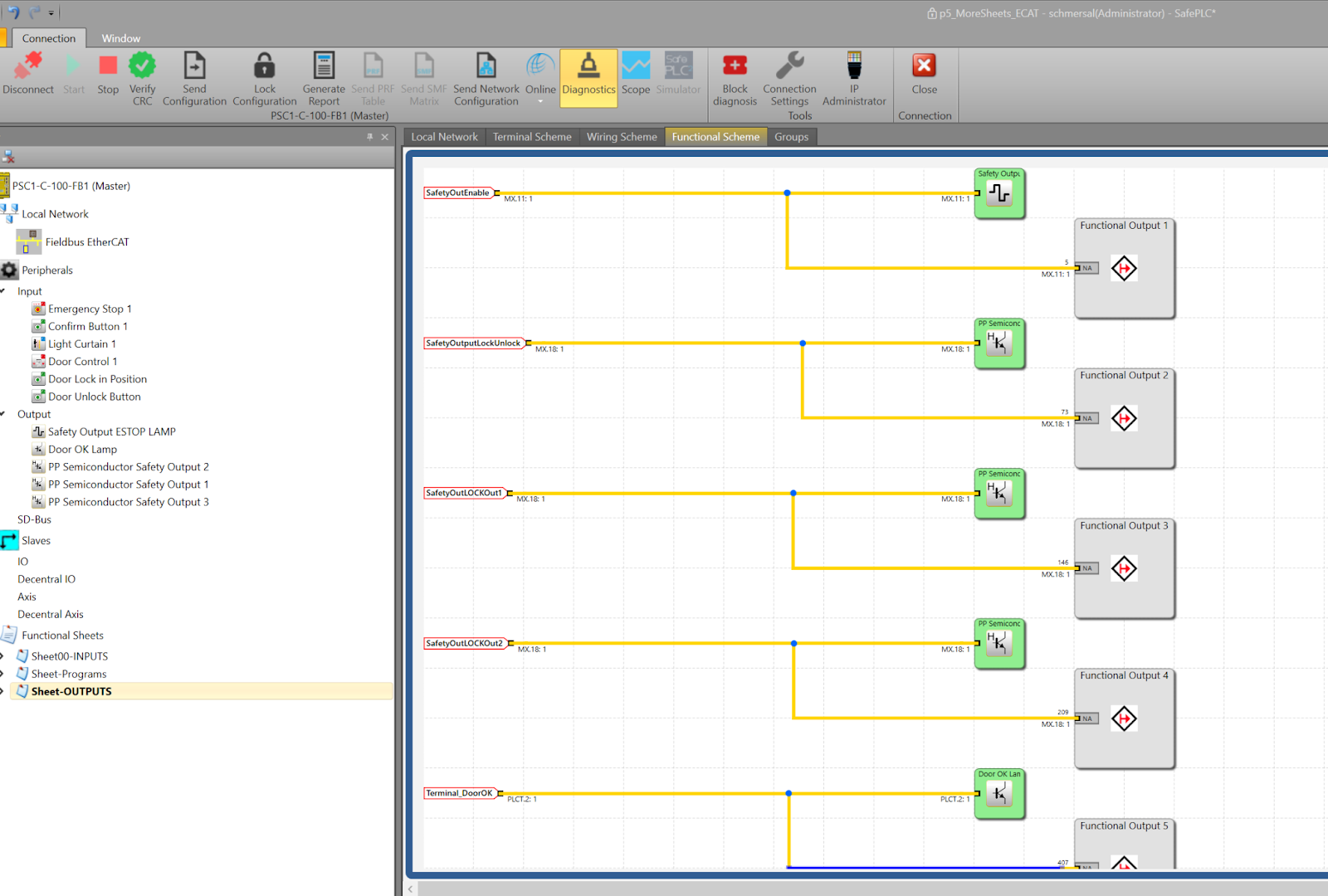
Sheet-Outputs
Sheet-Outputsは安全Controllerに接続された出力を制御し、またEtherCATネットワーク経由でBeckhoff TwinCAT3に送信します。
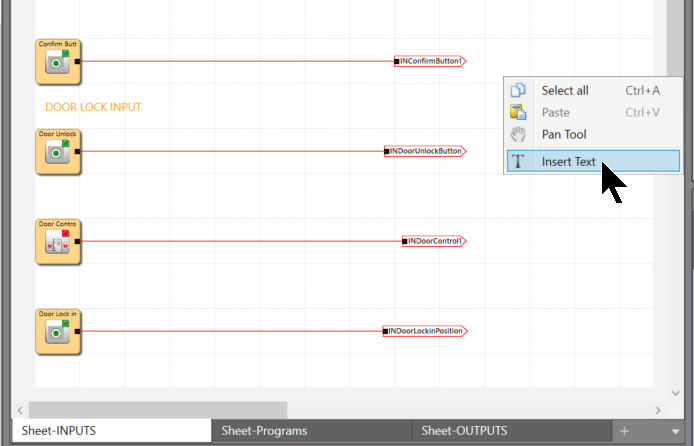
Add Comments
SafetyPLC2ツールのプログラムにコメントをつけたい場合は、Sheetの空き場所に右クリックInsert Textしてください。
Connect to the Controller
PSC1-C-100-FB1のCOM Portと専用ケーブルをPCに接続します。

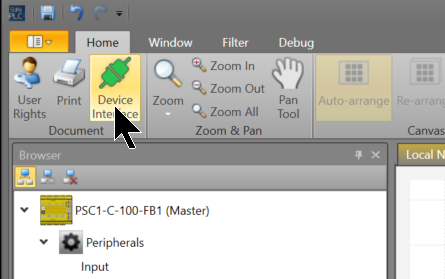
SafePLC2>Home>Device Interfaceをクリックします。
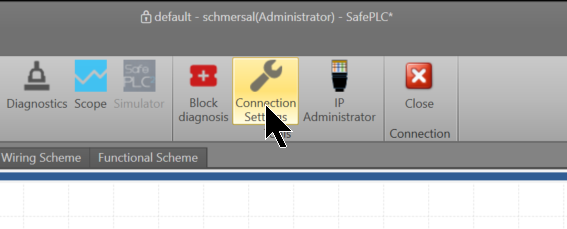
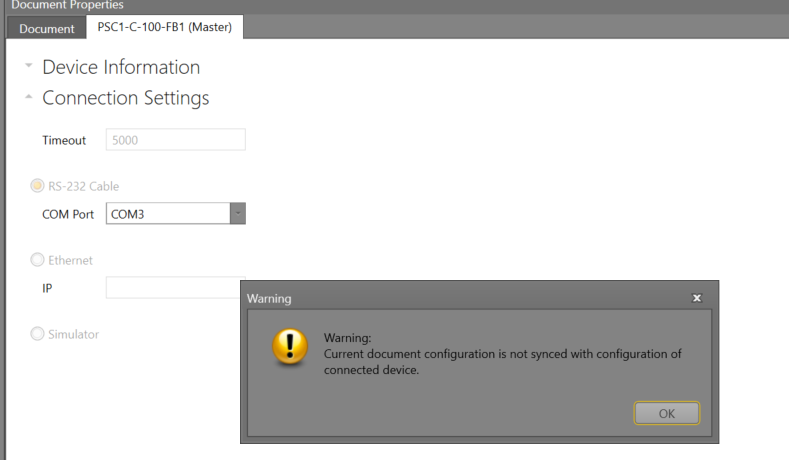
Connection Settingsをクリックします。
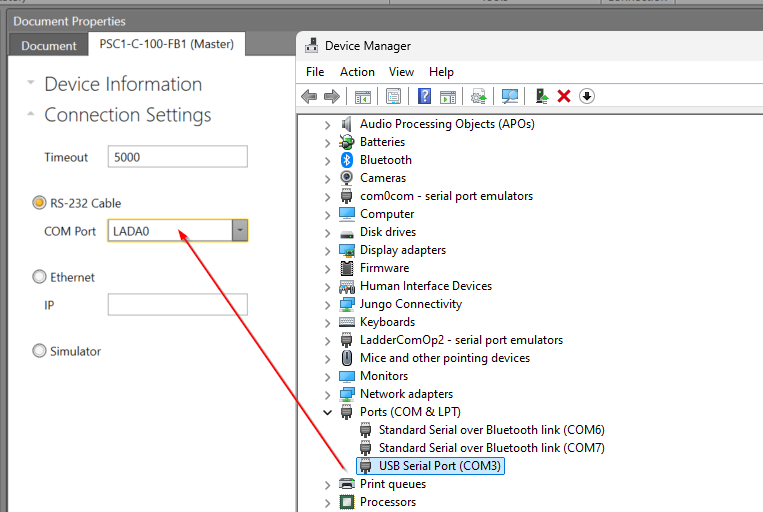
今回はRS-232ケーブルを使用するので、COM PortをDevice Managerに合わせて設定しましましょう。
最後はConnectボタンをクリックし、CPUとSafePLC2を接続しましょう。
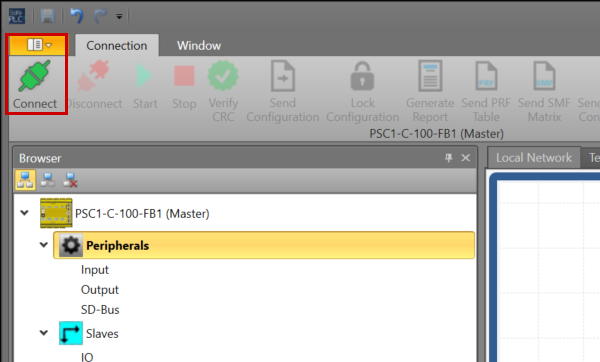
OKで進みます。それでSafePLC2とPSC1-C-100-FB1を接続しました。
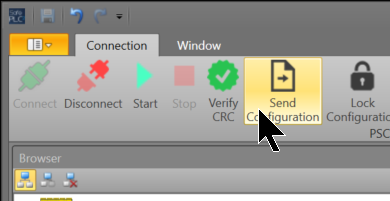
Send Configuration
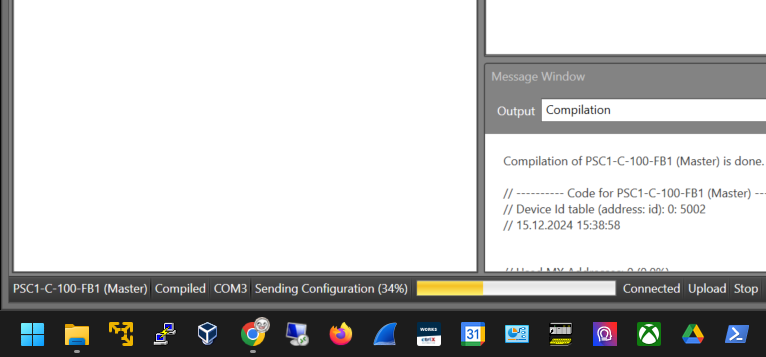
Send Configurationをクリックし、プロジェクトをPSC1-C-100-FB1に転送しましょう。
しばらくお待ち下さい…
Beckhoff Side
次はBeckhoff側を構築します。
Download ESI File
EthernetCAT ネットワークを構築するには、Schmersal社のHPからEDSをDownloadしてください。
https://products.schmersal.com/en_IO/psc1-c-100-fb1-103008452.html

先ほどDownloadしたESI Fileを下記のDirectoryに格納してください。
(自分が使用してるのはTwinCAT3 4026です)
C:\Program Files (x86)\Beckhoff\TwinCAT\3.1\Config\Io\EtherCAT

Reload ESI File
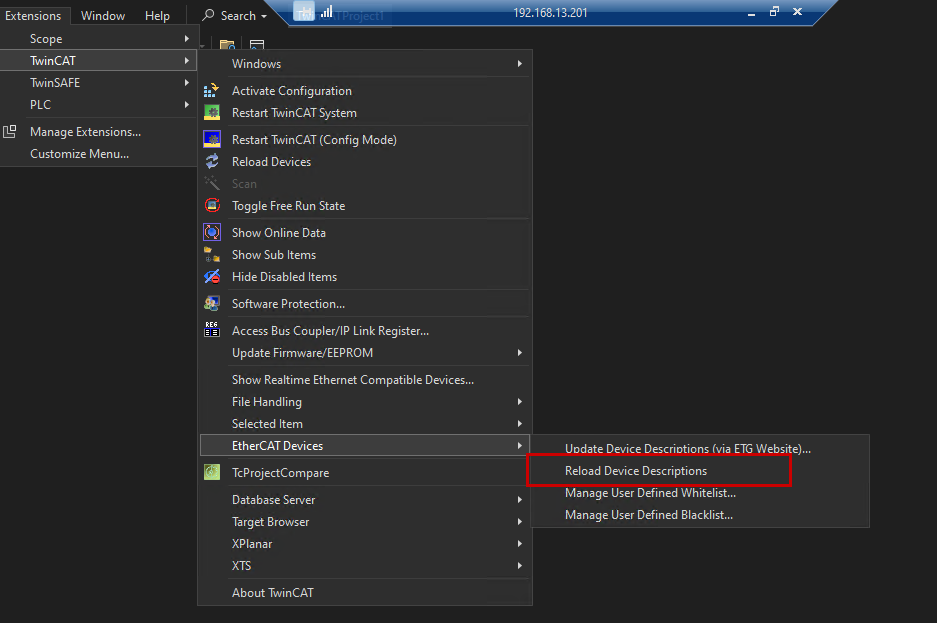
TwinCAT3Wを起動し、Extensions>TwinCAT>EtherCAT Devices>Reload Device DescriptionsでESI Fileを再ロードします。
Add New Project
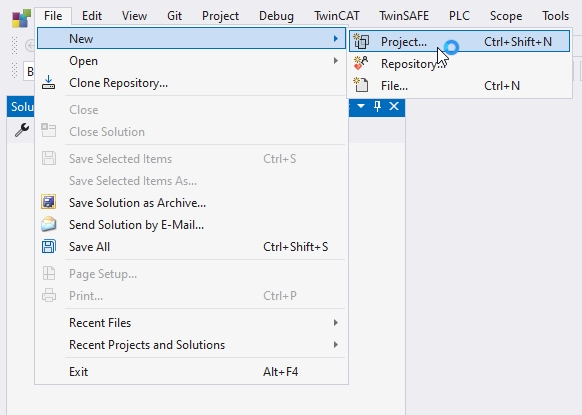
TwinCAT 4026を起動し、File>New>Projectで新しいプロジェクトを作成しましょう。
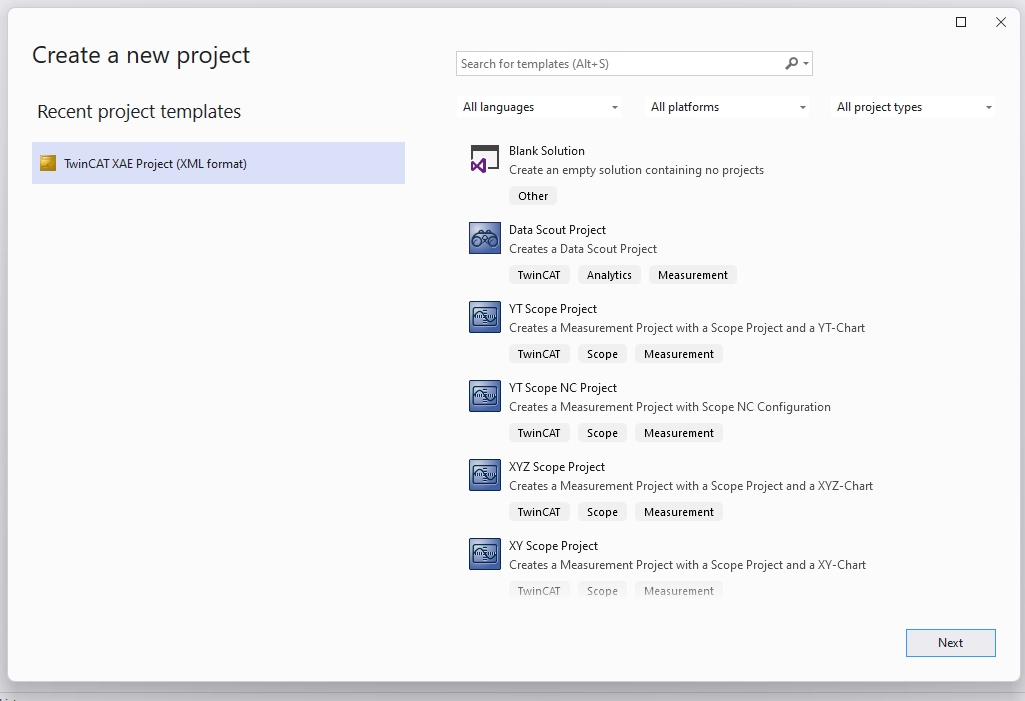
TwinCAT XAE Projectを選び、Nextで進みます。
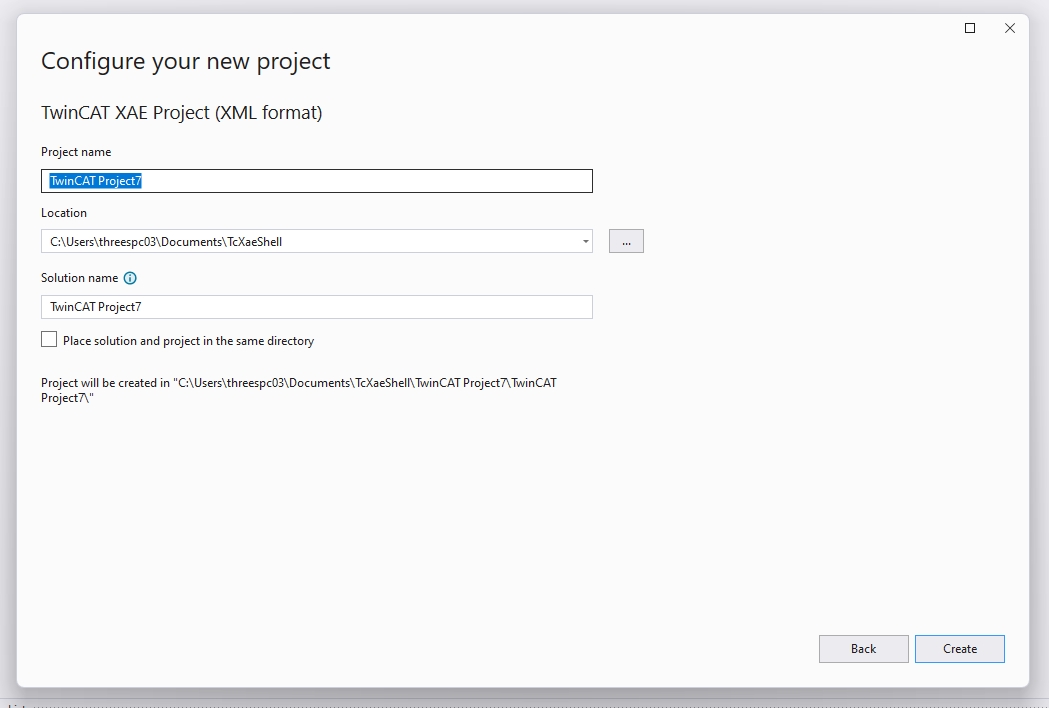
プロジェクト名を設定し、Createで進みます。
Done!TwinCATプロジェクトが作成されました。
Add EtherCAT Master
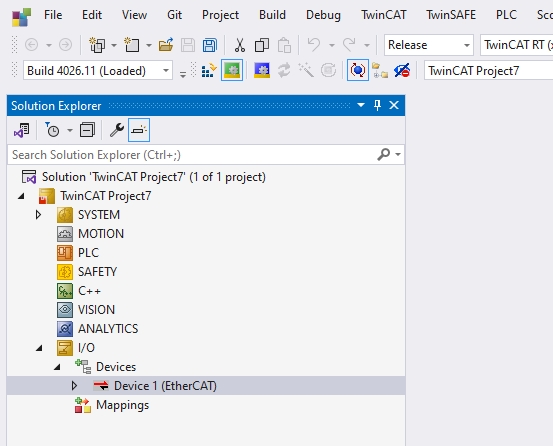
EtherCAT Masterを追加するため、Device>Add New Itemします。

EtherCAT>EtherCAT Masterを追加します。
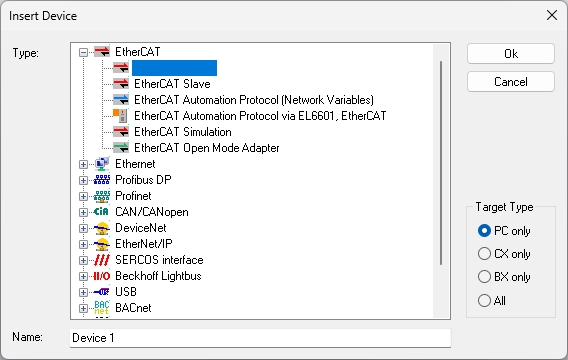
Done!EtherCAT Masterが追加されました。
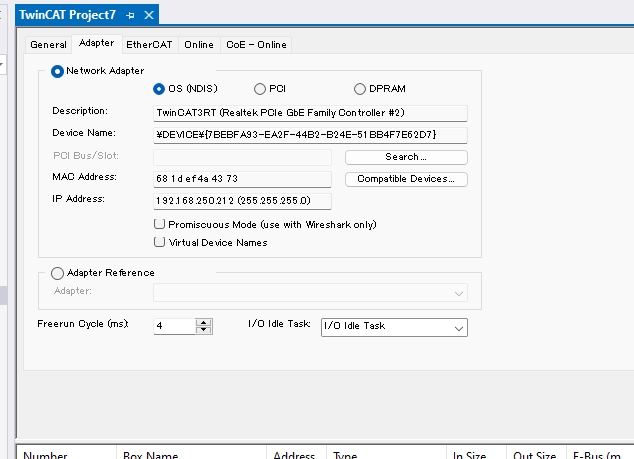
Configure Adapter
EtherCAT Masterとして使用するEthernet Adapterを設定するためにAdapter Tabを開きます。
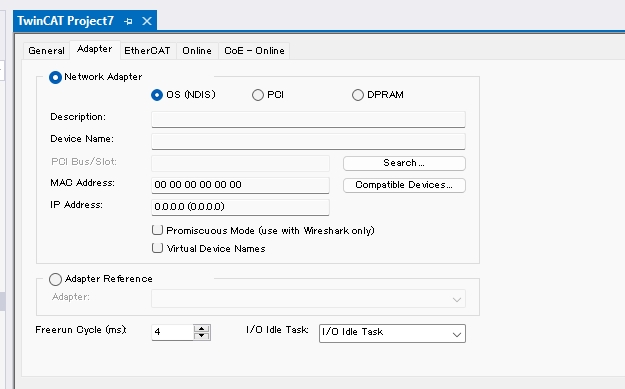
Searchをクリックし、実際に使用するEthernet Adapterを設定しましょう。
Scan Network
EtherCAT Masterを右クリック>ScanでネットワークにあるEtherCAT Slaveを検索します。
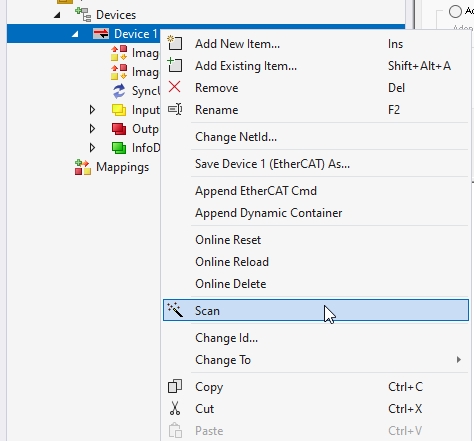
Done!今回記事で使用するPSC-C-100-FB1 Controllerを検索できました。

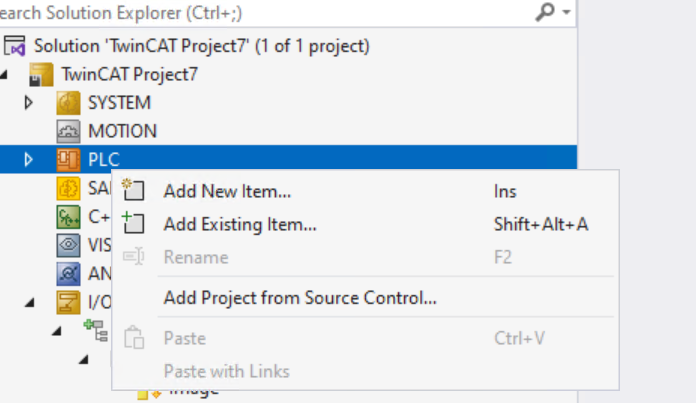
Add PLC
次はPLCプロジェクトを追加するため、PLC>右クリック>Add New Itemします。
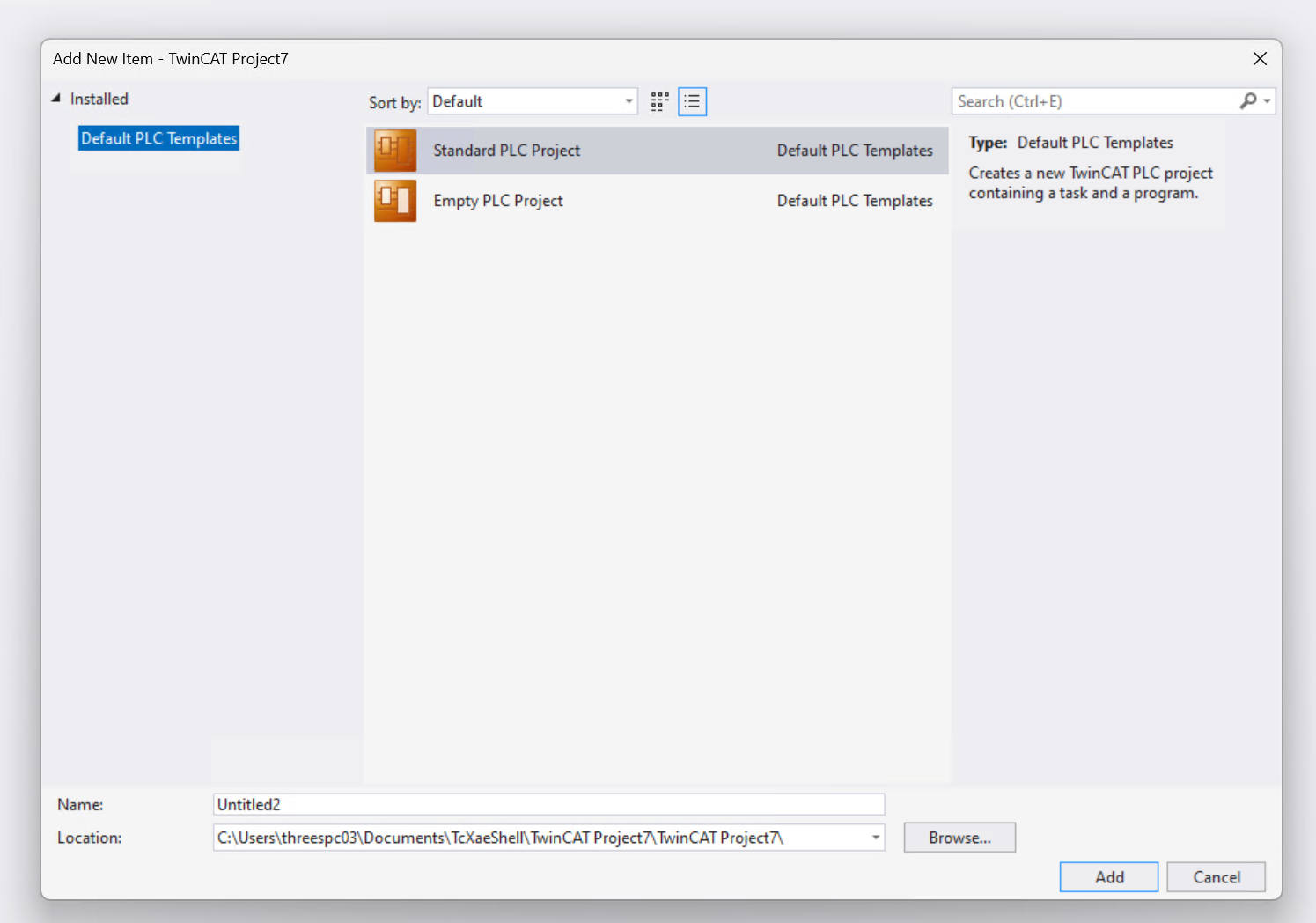
Standard PLC Projectを選び>Addで進みます。
DUT
PSC1のデータをまとめる構造体を定義します。
DUT_PSC1_IN
こちらはSchmersal PSC1コントローラーの入力データをまとめた構造体です。
| TYPE DUT_PSC1_IN : STRUCT uiAliveCounter :USINT; xAlwasyON :BOOL; uiPSCMode :USINT; uiDeviceAddressError :USINT; uiErrorCode :UINT; aLogicData :ARRAY[0..50]OF BYTE; bLogicData :ARRAY[0..407]OF BOOL; END_STRUCT END_TYPE |
DUT_PSC1_OUT
こちらはSchmersal PSC1コントローラーの出力データをまとめた構造体です。
| TYPE DUT_PSC1_OUT : STRUCT aLogicData :ARRAY[0..31]OF BOOL; END_STRUCT END_TYPE |
DUT_PSC1
こちらは先ほど定義した入力データと出力データをまとめた構造体です。
| TYPE DUT_PSC1 : STRUCT in :DUT_PSC1_IN; out :DUT_PSC1_OUT; _raw_in AT%I*:ARRAY[0..7]OF ARRAY[0..15]OF BYTE; _raw_Out AT%Q*:ARRAY[0..3]OF BYTE;; END_STRUCT END_TYPE |
GVL
次はGlobal Variable Listで先程定義した構造体で変数を作成します。
| {attribute ‘qualified_only’} VAR_GLOBAL SlaveCount AT %I*:UINT; PSC1:DUT_PSC1; END_VAR |
FB_PSC
こちらのFunction BlockはSchmersal PSC-C-100-FB1のデータをEncodeできます。
| FUNCTION_BLOCK FB_PSC VAR_INPUT END_VAR VAR_OUTPUT END_VAR VAR_IN_OUT ioData : DUT_PSC1; END_VAR VAR iCounter:INT; END_VAR |
| //AlwaysOn from PSC ioData.in.xAlwasyON:=ioData._raw_in[0][0].4; //Operation mode ioData.in.uiPSCMode:=ioData._raw_in[0][0] AND 2#0000_0111; //AliveCounter ioData.in.uiAliveCounter:=ioData._raw_in[0][0] AND 2#1110_0000; ioData.in.uiAliveCounter:=SHR(ioData.in.uiAliveCounter,5); //Device Address Error ioData.in.uiDeviceAddressError:=ioData._raw_in[0][1]; //Error Code ioData.in.uiErrorCode:=SHL(TO_UINT(ioData._raw_in[0][3]),8); ioData.in.uiErrorCode:=ioData.in.uiErrorCode+ioData._raw_in[0][4]; //Logic InputData MEMMOVE( destAddr:=ADR(ioData.in.aLogicData[0]) ,srcAddr:=ADR(ioData._raw_in[0][5]) ,n:=51 ); FOR iCounter:=0 TO 50 DO ioData.in.bLogicData[iCounter*8+0]:=ioData.in.aLogicData[iCounter].0; ioData.in.bLogicData[iCounter*8+1]:=ioData.in.aLogicData[iCounter].1; ioData.in.bLogicData[iCounter*8+2]:=ioData.in.aLogicData[iCounter].2; ioData.in.bLogicData[iCounter*8+3]:=ioData.in.aLogicData[iCounter].3; ioData.in.bLogicData[iCounter*8+4]:=ioData.in.aLogicData[iCounter].4; ioData.in.bLogicData[iCounter*8+5]:=ioData.in.aLogicData[iCounter].5; ioData.in.bLogicData[iCounter*8+6]:=ioData.in.aLogicData[iCounter].6; ioData.in.bLogicData[iCounter*8+7]:=ioData.in.aLogicData[iCounter].7; END_FOR //Logic Input Data FOR iCounter:=0 TO 3 DO ioData._raw_Out[iCounter].0:=ioData.out.aLogicData[iCounter*8+0]; ioData._raw_Out[iCounter].1:=ioData.out.aLogicData[iCounter*8+1]; ioData._raw_Out[iCounter].2:=ioData.out.aLogicData[iCounter*8+2]; ioData._raw_Out[iCounter].3:=ioData.out.aLogicData[iCounter*8+3]; ioData._raw_Out[iCounter].4:=ioData.out.aLogicData[iCounter*8+4]; ioData._raw_Out[iCounter].5:=ioData.out.aLogicData[iCounter*8+5]; ioData._raw_Out[iCounter].6:=ioData.out.aLogicData[iCounter*8+6]; ioData._raw_Out[iCounter].7:=ioData.out.aLogicData[iCounter*8+7]; END_FOR |
MAIN
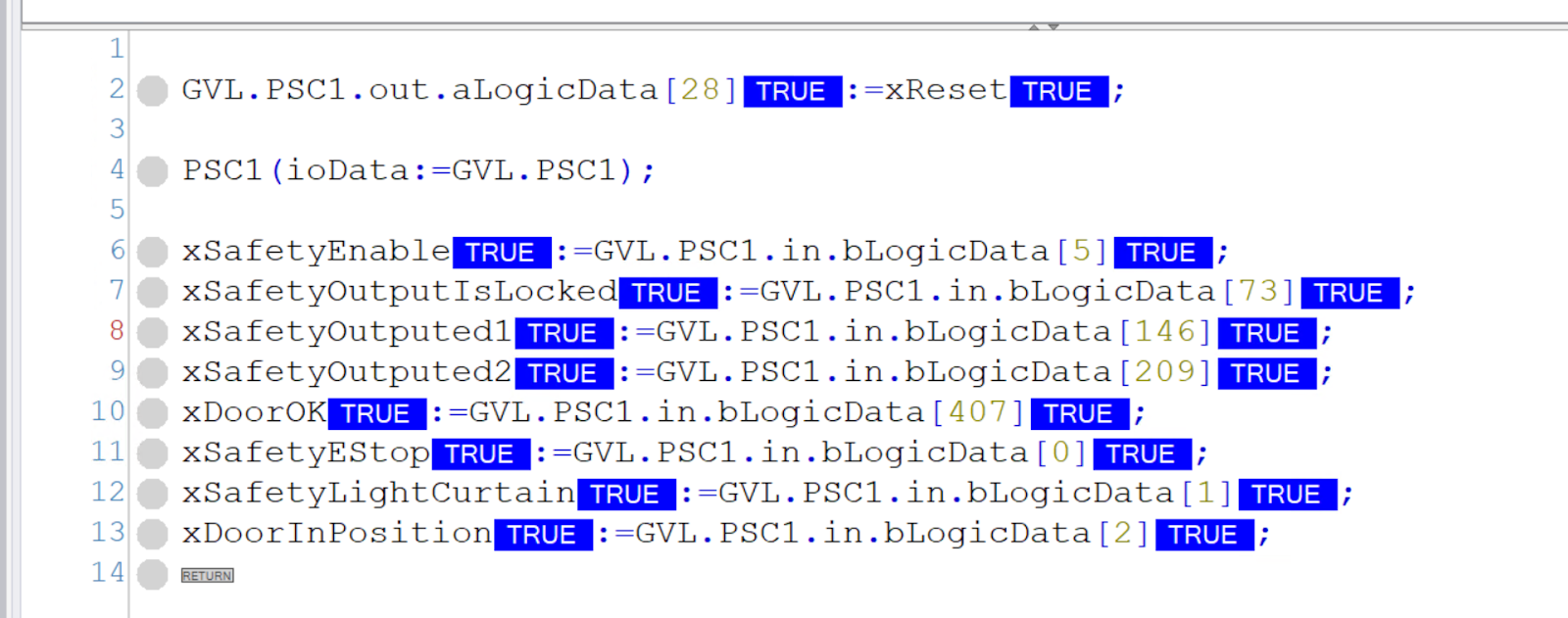
最後はMAINプログラムでFB_PSCのInstanceを定義し、非常停止などの状態・またリセット信号をSchmersal PSC-C-100-FB1から送受信できるようにします。
| PROGRAM MAIN VAR xReset:BOOL; xSafetyEnable:BOOL; xSafetyOutputIsLocked:BOOL; xSafetyOutputed1:BOOL; xSafetyOutputed2:BOOL; xDoorOK:BOOL; xSafetyEStop:BOOL; xSafetyLightCurtain:BOOL; xDoorInPosition:BOOL; END_VAR VAR PSC1:FB_PSC; END_VAR |
| GVL.PSC1.out.aLogicData[28]:=xReset; PSC1(ioData:=GVL.PSC1); xSafetyEnable:=GVL.PSC1.in.bLogicData[5]; xSafetyOutputIsLocked:=GVL.PSC1.in.bLogicData[73]; xSafetyOutputed1:=GVL.PSC1.in.bLogicData[146]; xSafetyOutputed2:=GVL.PSC1.in.bLogicData[209]; xDoorOK:=GVL.PSC1.in.bLogicData[407]; xSafetyEStop:=GVL.PSC1.in.bLogicData[0]; xSafetyLightCurtain:=GVL.PSC1.in.bLogicData[1]; xDoorInPosition:=GVL.PSC1.in.bLogicData[2]; |
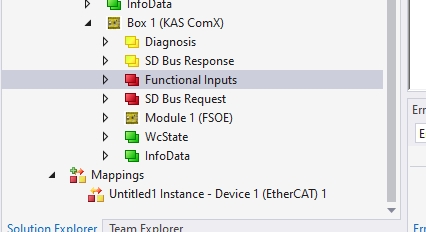
Mapping
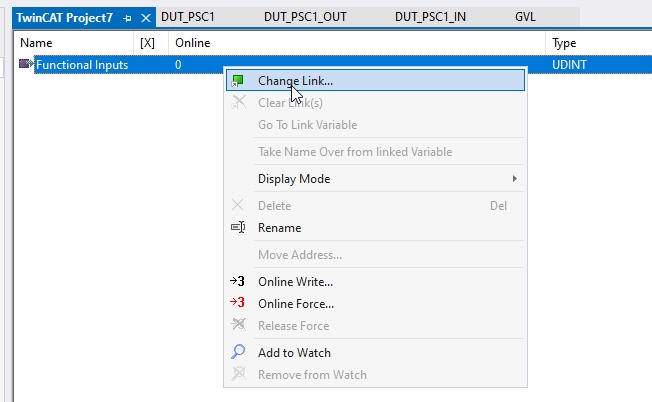
PSC-C-100-FB1とTwinCAT3間のProcess IOデータをMappingします。Functional Inputsは出力で、Diagnosisは入力になります。Functional Inputsをクリックしてください。
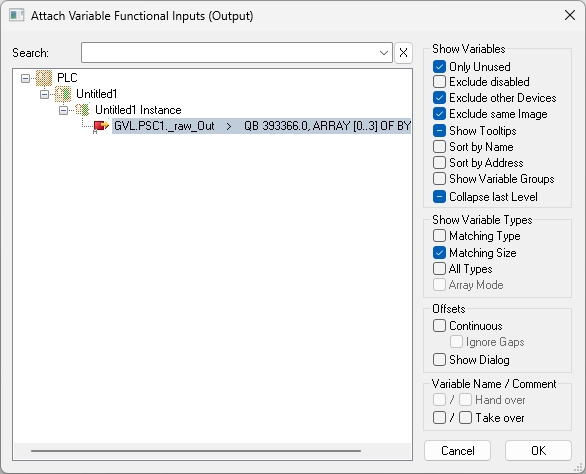
Functional Inputsを右クリック>Change Linkします。
先ほどGVLで定義した変数と接続します。
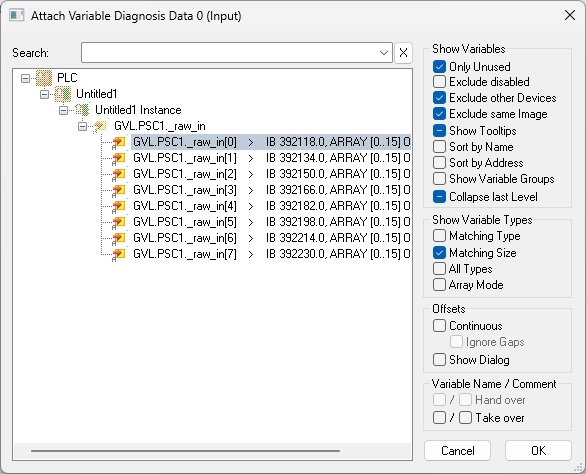
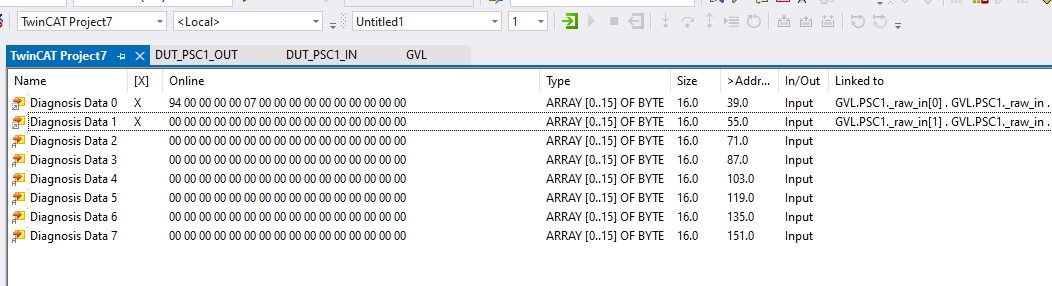
入力データ側では今回は最初の0-55Bytes目のみ使用しますので、Diagnosis Data0とDiagnosis1を選び>Change Linkをクリックします。
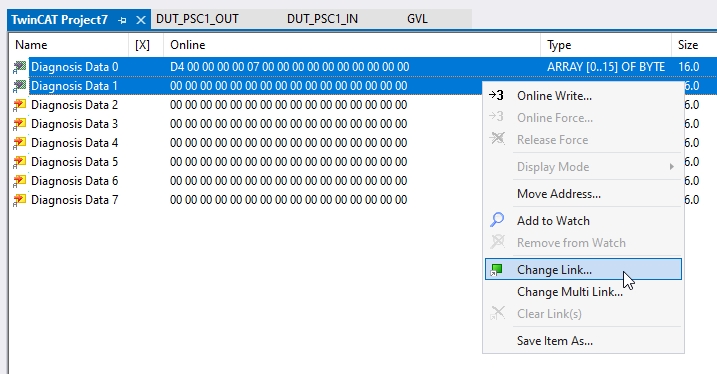
先ほどGVLで定義した変数と接続します。
Done!
Visualization
PSC-C-100-FB1と通信確認するために簡単なWeb画面を作成します。
Add Web Visualization
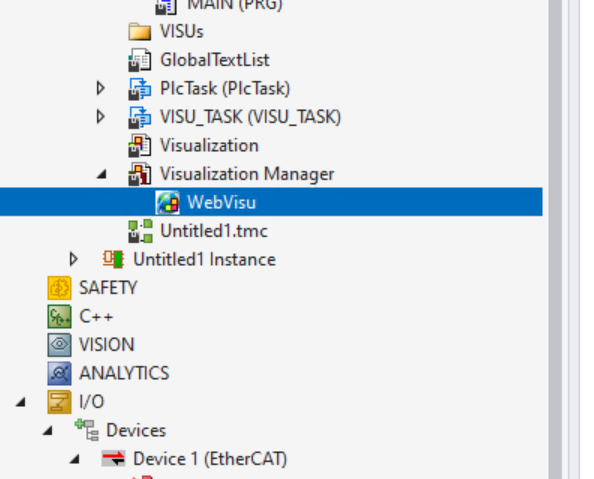
また、今回の記事ではBrowser上でBeckhoff TwinCAT3のWeb HMIをアクセスしますので、Visualization Manager>WebVisuを追加してください。
Active Configuration
TwinCAT プロジェクトをPLCにDonwloadします。
OKで進みます。
TwinCAT3をRun Modeに切り替えましょう。
Login
LoginでプログラムをDownloadします。
Yesで進みます。
最後はPlayボタンをクリックしPLCプログラムをスタートします。
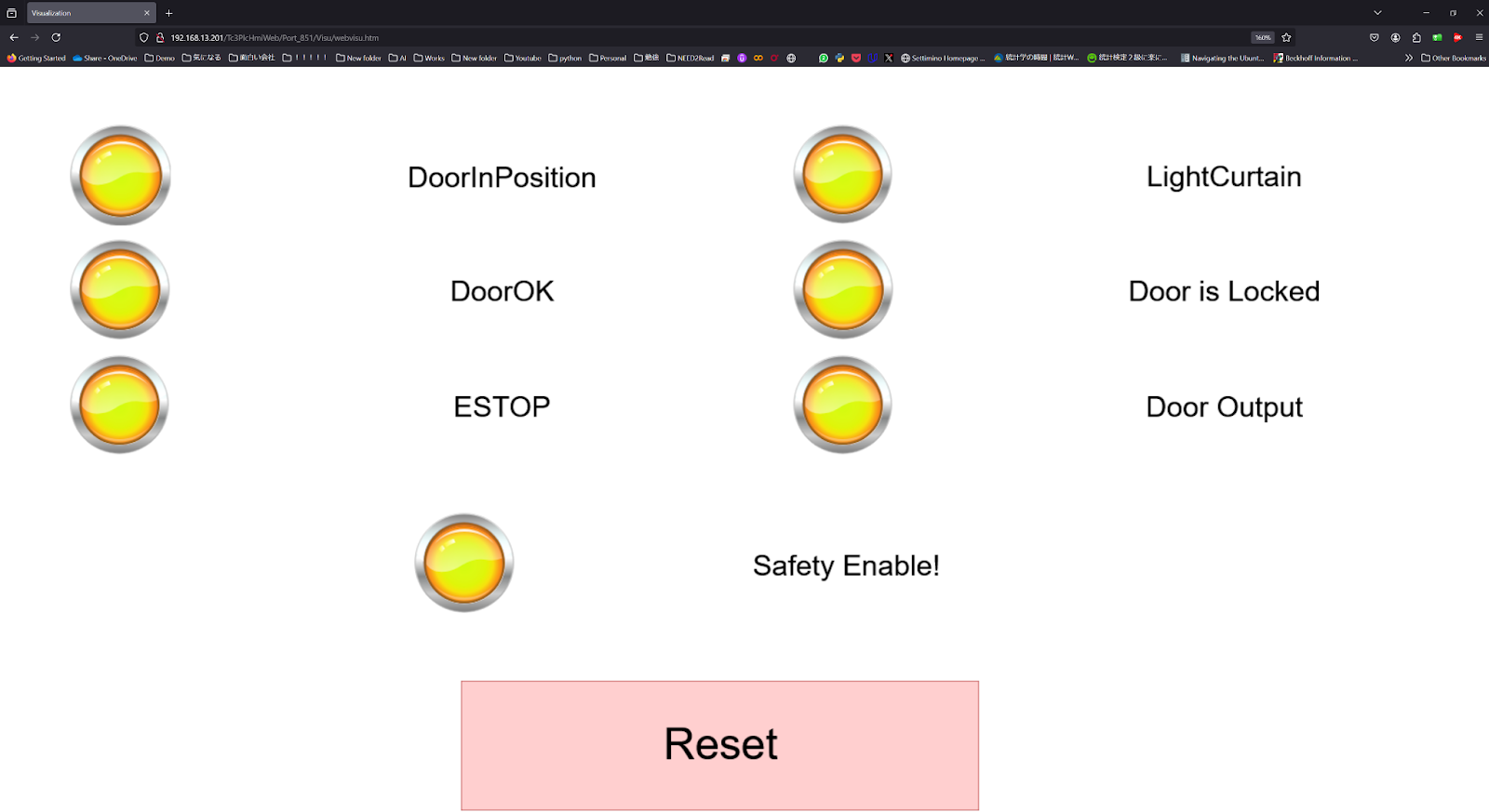
Result
SchmersalのPSC-C-100-FB1 Safety controllerでは非常停止などの安全デバイスに状態を出力しています。
TwinCAT3側もそれらのデータを受信しましたし、リセット許可信号も送信できました。
下記のLinkからIP Addressを自分のTwinCAT3 PCのIP Addressに変更し、BrowserからBeckhoff TwinCAT3のWeb HMIにアクセスできると思います。
https://TwinCAT3 IP Address/Tc3PlcHmiWeb/Port_851/webvisu.htm
こちらの動画で動作を確認してください。
Schmersal.PSC1-C-100-FB1 with TwinCAT3 via EtherCAT Communication
こちらのLinkで今回記事で作成したプロジェクトをDownloadできます。
https://drive.google.com/file/d/1_Ic7vMHdk_tnWtKYgCNFSfBsQIJhiAk4/view?usp=sharing