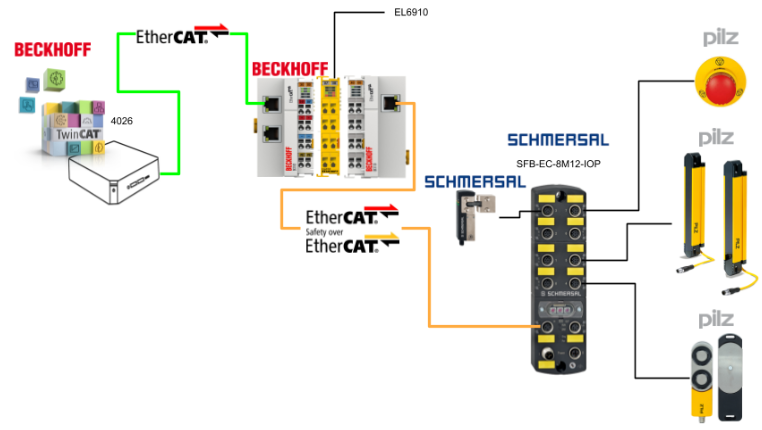
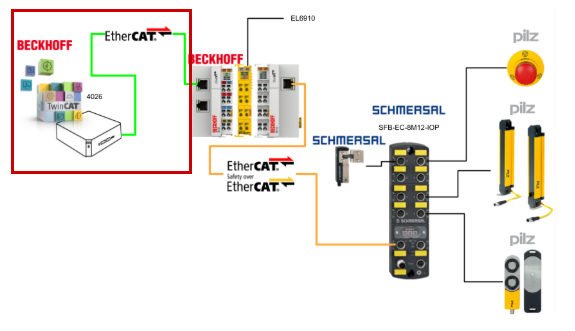
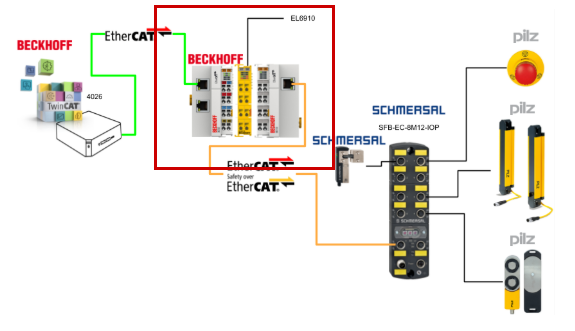
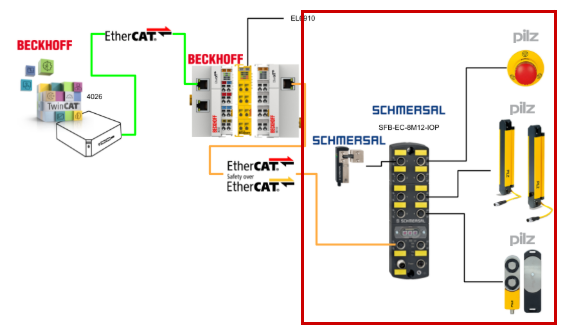
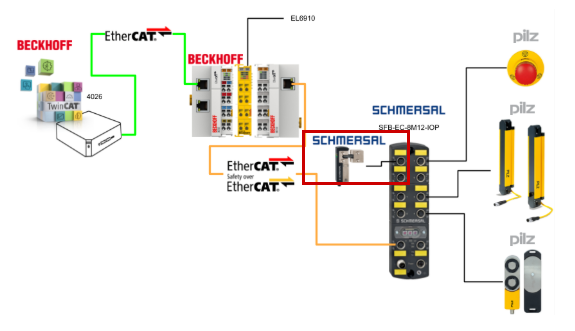
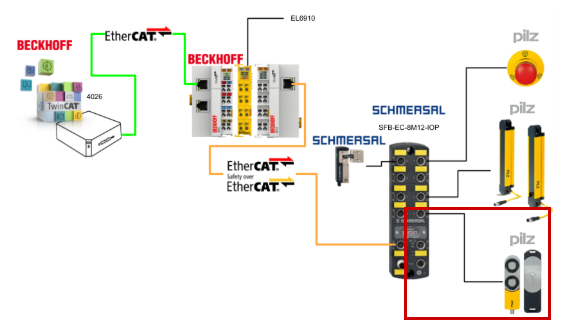
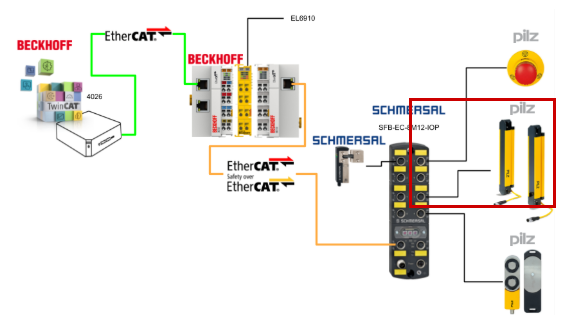
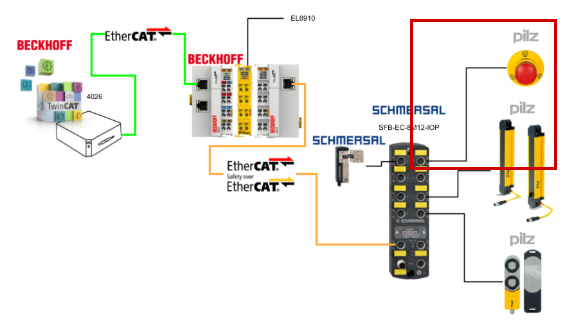
こちらの記事ではBeckhoff TwinCAT 4026でEtherCATネットワークを立ち上げ、EL6910でFSoE MasterでFSoEネットワーク構築します。そしてSchmersal SFB-EC-8M12-IOPと接続します。安全機器はPilzの非常停止とライトカーテン、そしてSchmersalのAZM40Z-I2-ST-1P2Pドアロックを使用します。
さ、FAを楽しもう。
Reference Video
Beckhoff.Schmersal SFB-EC-8M12-IOPとFSoEで接続しましょう
Reference Link
前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
現在、私達の活動はほぼ無償で続けており、より多くのコンテンツを提供するためには、皆様の温かいご支援が大変重要です。もし可能であれば、以下のリンクから応援していただけると大変嬉しく思います。
高橋クリスのメンバーシップ
こちらはFullさん(full@桜 八重 (@fulhause) / X)と共にやっているラジオにメンバーシップを登録いただけます。
https://note.com/fulhause/membership/join
AMAZON ギフトリスト
こちらは自分のブログのコンテンツ制作や設備の充実に大いに役立てさせていただきます。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon
こちらは自分のブログのコンテンツ制作や設備の充実に対する小さな応援の気持ちのPatreonです。
https://www.patreon.com/user?u=84249391
皆様のサポートが、私たちの活動をより充実させる力となります。
どうぞよろしくお願いします。
メールアドレス(*=@)
X
PSEN op4F-SL Series?
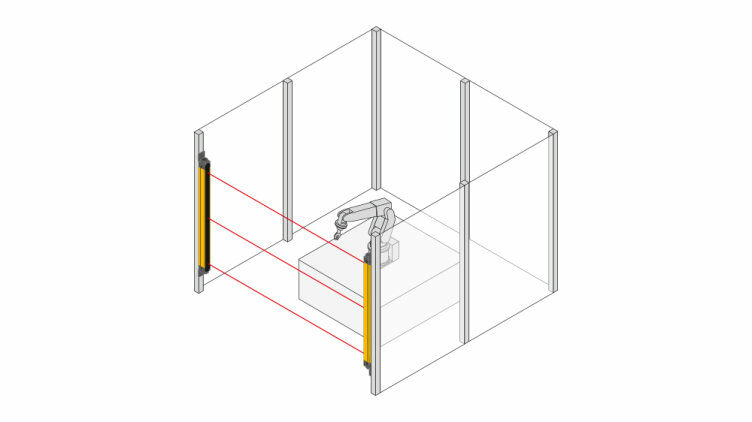
Pilz社のPSEN op4F-SLシリーズのセーフティライトカーテンは、IEC 61496-1およびIEC 61496-2(AOPD)に準拠したデバイス(ESPEタイプ:4)であり、機械、ロボット、および自動化システムが物理的な危険性をもたらす可能性のある作業スペースに適しています。

Purpose
PSEN op4F-SLシリーズのセーフティライトカーテンは、ESPEタイプ4の感電保護装置です。それによって作業員およびシステムの保護に使用され、セーフティライトカーテンは以下のように設計されています:
- 建物内の危険区域の確保
- 14mmの分解能で建物内のアクセスを確保
また、セーフティ・ライト・カーテンは、以下の場合に限り、機械上の個人保護に使用できます。
- セーフティライトカーテンにより、危険な状態を取り除くことができます。
- 機械の始動はセーフティライトカーテンによって制御されます
- 安全性評価では、14 mm 以上の分解能は規定されていない。
注意するのは安全レベル PL e (Cat.4)/SIL 3 は、以下の場合にのみ達成されます。 安全出力は、2 チャネルモードで安全関連の処理を行う必要があります。
セーフティライトカーテンには再起動インターロックが装備されていません。
安全アセスメントで再起動インターロックが必要な場合は、プラントのプログラム可能な安全システムでこの機能を確保する必要があります。 保護違反の後、危険区域内に作業員がいる場合、危険区域内でシステムを起動することはできません。
また、セーフティライトカーテンを設置するとき、保護されたフィールドの裏側に回り込んだり、足を踏み入れたりしないように注意してください。
これには、セーフティ・ライト・カーテンの他に、他の安全装置や保護手段が必要になる場合があります。 これらは、特定の適用範囲と特定の地域条件に基づく安全アセスメントによって決定する必要があります。
Serial numbers
注意するのはtransmittersとreceiversは同じシリアル番号を持ち、ペアで設置、操作、交換する必要があります。

Function
セーフティ・ライト・カーテンはtransmittersとreceiversで構成されている。その機構によって、
- transmittersとreceiversを外部損傷から守る
- 振動による誤動作から安全ライトグリッドを保護します
保護エリアは赤外線光ビームで覆われ、赤外線光ビームは送信機から受信機へ放射される。
から受信機に照射される。 こうして生成された保護領域は、不透明な物体を検知することができます。赤外線の送受信の制御と監視は、マイクロプロセッサーによって行われます。
出力信号スイッチング・デバイス(OSSD)は、以下の条件のいずれかが満たされるとOFF状態に切り替わります:
- 複数の光ビームは、安全ライトカーテンによってカバーされる分解能(14 mm)と少なくとも同じ大きさの物体、身体の一部、または不透明な物体によって遮られた状態
- OSSDの1つによってエラーが検出されたこと
- 干渉光が検出されたこと
エラーが発生した場合、OSSDはOFF状態を維持し、 この状態は、安全ライトグリッドが正常に再起動された後にのみ ON 状態に戻すことができます。
PSEN op4F-SLシリーズのセーフティライトグリッドには以下の機能があります:
- 自動スタート
- モニタースタート
- EDM(ポジティブガイド接点付きリレーに接続した場合)
- カスケード
transmittersとreceiversは、それぞれLED側のtransmittersとreceiversに割り当てられたM12コネクター付きのケーブルで電気的に接続されています。
Automatic start
セーフティ・ライト・カーテンのスイッチをオンにすると、セーフティ・ライト・カーテンが自動的に始動し、以下の条件で OSSD がオン状態に切り替わります:
- 両方のOSSDが正しく配線されたこと
- 障害が発生してないこと
- プロテクトフィールドがクリアされていること
プロテクト・フィールドに違反した場合、OSSDはオフ状態に切り替わる。
Safety distance
セーフティ・ライト・カーテンと危険な機械部品との最短距離は、危険な機械部品の動作が停止するまでオペレータが危険領域に到達できない程度にする必要があります。
EN ISO 13855規格によると、この距離は3つの要素によって決まります:
- セーフティライトカーテンの応答時間
それビームの中断からOSSDがオフ状態に変化するまでの間隔に該当します - マシンの停止時間
OSSDがOFF状態に変化してから危険な機械の動きが停止するまでの間隔(接続されたリレーの反応時間を含みます) - アプローチ速度
検出される物体が危険区域に接近する速度(mm/s)
EN ISO 13855に準拠した最小距離の一般的な計算式は以下になります。
| S = K * (t1 + t2) + C |
- S=保護フィールドの始点から危険源までの最短距離(mm)。
- K=検出される物体が危険領域に接近する速度(mm/s)
K = 1600 mm/s when S > 500 mm
K = 2000 mm/s when S ≤ 500 mm - t1=セーフティライトカーテンの応答時間(秒)
保護領域に違反すると、セーフティ・ライト・カーテンのOSSD出力の信号が変化するまでの時間 - t2=マシンの停止時間(秒)
OSSD出力の信号が変化してからマシンが停止するまでの時間 - C=指保護付きセーフティ・ライト・グリッド用追加距離
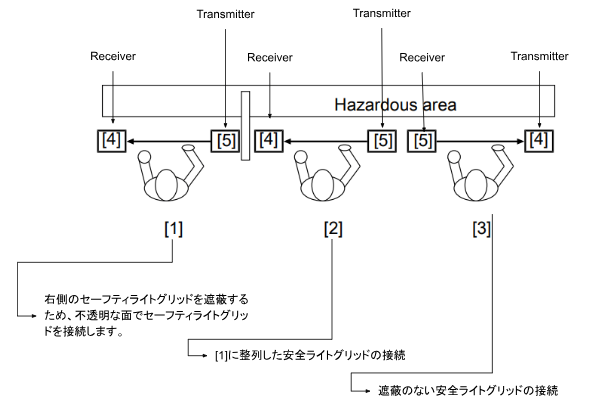
Several adjacent safety light grids
隣接する複数の安全ライトグリッドの配置は、さまざまな方法で実現でき、周囲の状況に注意してください。
Wiring
セーフティ・ライト・カーテンへの配線には様々なガイドラインがあります。例えば、
- 評価装置への接続用端子は、施錠可能な制御キャビネット内に保管してください。 これにより、不正な改造を防ぐことができます。
- 試験パルス時間が評価デバイスによって正しく処理されていることを確認してください。
- 接続ケーブルは、大電流や揮発性の高い電流を流すケーブルの近くに敷いたり、接触させたりしないでください。
- 異なるセーフティ・ライト・カーテンまたはセーフティ・スイッチの OSSD にワイヤを接続するには、別のケーブルを使用してください。
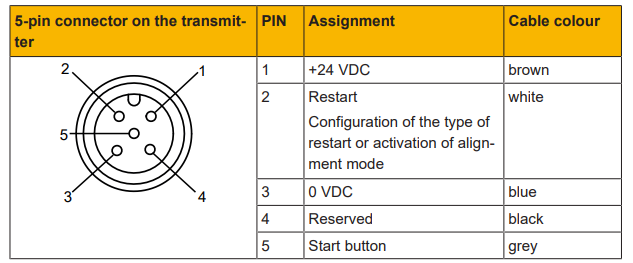
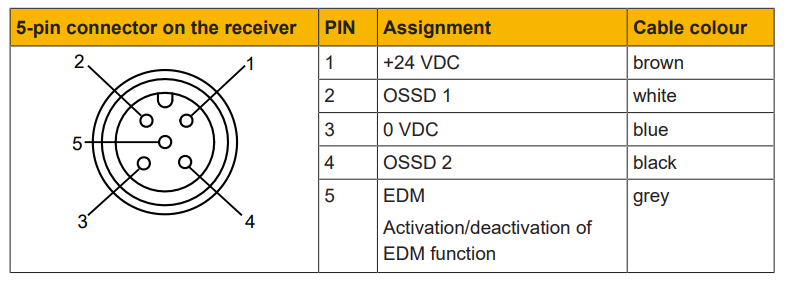
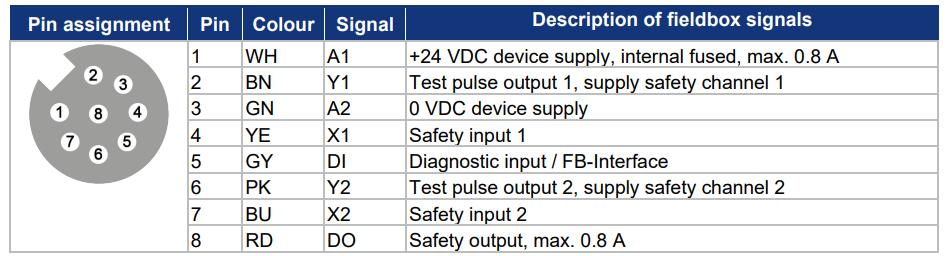
Connector pin assignment
transmittersとreceiversの電気的接続はM12コネクターで行います。
transmitters
receivers
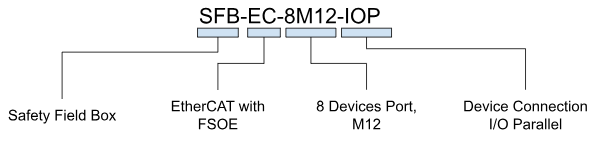
SFB-EC-8M12-IOP?
セーフティフィールドボックスSFB-EC-8M12-IOPは、パラレルIO信号を持つ最大8台のセーフティスイッチギアユニットをEtherCAT® / FSoEネットワークに接続するために設計されています。 また、デバイスポートX4〜X7には最大4台のBDF200-FBコントロールパネルを接続できます。
接続された安全開閉器からの安全信号は、評価のために安全フィールドバスを介して安全コントローラに転送されます。 大規模な安全アプリケーションでは、複数のフィールドボックスを電源とフィールドバスに直列に接続できます。
そしてデバイスに接続された非安全 IO 信号は、フィールドバスを介して制御システムに接続されます。

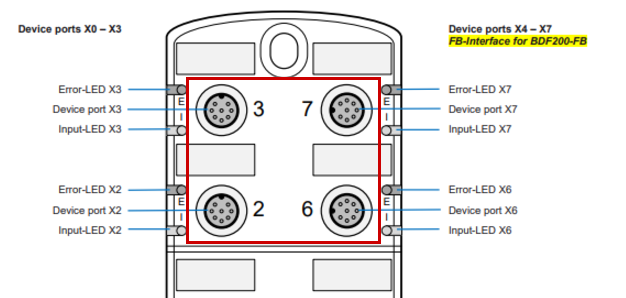
How to Read the Module Number?
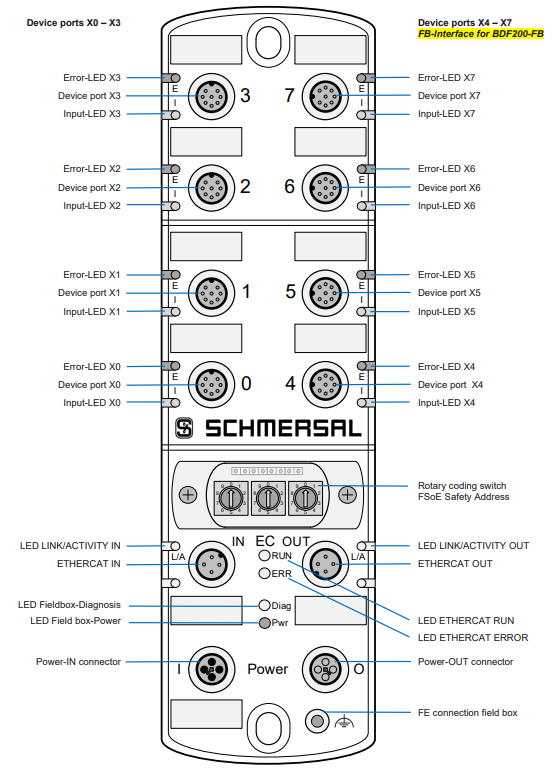
Layout
こちらはSFB-EC-8M12-IOPのLayoutになります。
Safety inputs and test pulse outputs
SFB-EC-8M12-IOPは、8つのデバイスポートX0~X7それぞれにドライ接点を供給するための2つのセーフティ入力と2つのテストパルス出力を備えています。
これらの安全入力は、以下の用途に使用できます。
- ドライNC接点付き1チャンネル安全スイッチ(1oo1)
- フィールドボックスの他の全てのセーフティ入力へのクロスフォールトモニタ
- 入力信号のデバウンスフィルタ/安定時間フィルタ
- テストパルス持続時間1ms、テストパルス間隔500msのテストパルス出力による接点供給
- ドライNC接点付き2チャンネルセーフティスイッチ(1oo2)
- フィールドボックスの他の全てのセーフティ入力へのクロスフォールトモニタ
- 入力信号のデバウンスフィルタ/安定時間フィルタ
- テストパルス出力(テストパルス時間1ms、テストパルス間隔500ms)による接点供給
- 24V-PNPソリッドステート出力(OSSD)付き2チャンネル安全スイッチ(1oo2)
- フィールドボックスによる機器接続ケーブルの交差故障監視なし
- 入力信号のデバウンスフィルタ/安定時間フィルタ
- 安全スイッチギアの安全入力にテストパルスなしでDC24 Vを供給
- OSSDのスイッチオン時、負のテストパルスの長さ
- 10μs~1ms、間隔20ms~120sの負のテストパルスを送信する必要があります。
Safety outputs
SFB-EC-8M12-IOPは、最大0.8Aまでの負荷を制御するための8つのデバイスポートX0~X7それぞれにセーフティデジタル出力を備え、最大15mAまでの2チャンネルセーフティ入力を制御するための設定可能なセーフティ信号出力を備えています。
これらの安全出力は、以下の用途に使用できます。
- ワイヤー1本による安全出力(デジタル出力DO)
- 最大PL dの安全デジタル出力(PPスイッチング)。
- 例:インターロックのソレノイドなどで使用できます
- テスト出力、短絡および過負荷保護
- 2線式安全出力(デジタル出力DOとテストパルス出力Y1)
- 最大PL eの安全デジタル出力(2Pスイッチング)、制御用
- 例:2チャンネルロック機能付きインターロック
- 例:セーフティリレーモジュール(SRB-E-301STなど)の2チャンネル制御
- テスト出力、短絡および過負荷保護
Diagnostic input / FB interface
SFB-EC-8M12-IOPは、接続された安全開閉器のステータス信号用に、8つのデバイスポートX0〜X7にそれぞれ1つの診断入力を備えています。
4つのデバイスポートX4 – X7では、FBインタフェースがこの入力に追加統合されています。 BDF200-FBなどのコマンドおよび信号機器からの非安全信号は、単線のFBインタフェース経由で送信できます。 FBインターフェイスは、安全スイッチギアが内蔵されているかどうかを自動的に検出します。
FailSafe over EtherCAT® communication
FailSafe over EtherCAT® (FSoE)はEtherCAT®経由の標準通信を機能的に安全に拡張します。 FSoEに基づく通信は、改ざん、伝送エラー、テレグラムシーケンスの変更などに対して安全です。
そしてセーフティフィールドボックスSFB-ECはEtherCAT®ネットワーク内のFSoEモジュールです。 このモジュールはFSoEマスタとの安全通信を確立し、安全データを “FSoE “経由で、機能データを “EtherCAT®”経由で送信します。

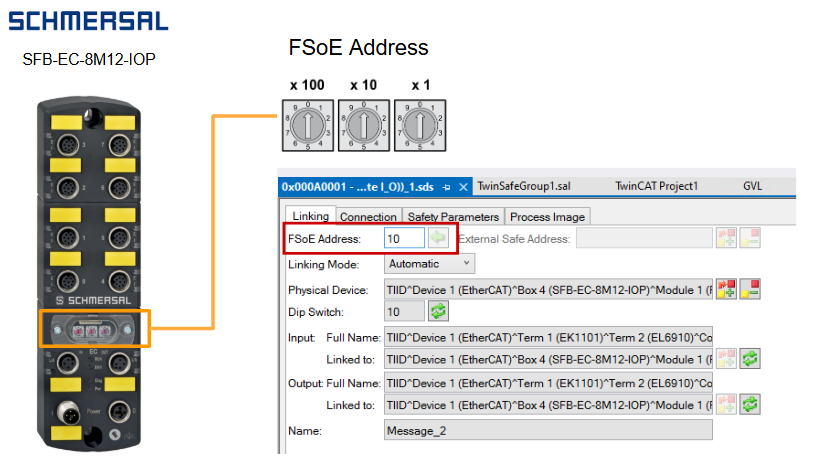
FSoE Address
SFB-EC-8M12-IOPのロータリースイッチでFSoEのアドレスを設定できます。
EtherCAT® Linear topology
SFB-ECはリニアトポロジーをサポートしています。

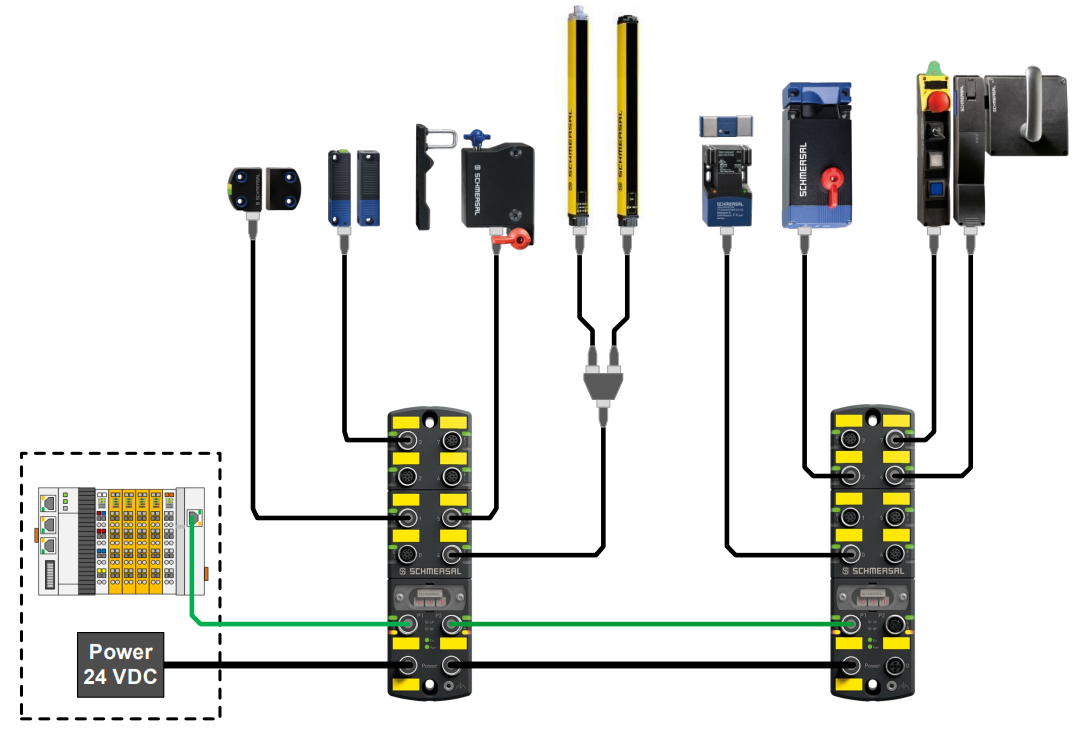
System Layout SFB-EC
こちらは一般的なシステムレイアウトと安全スイッチギヤの配線例になります。
Configurable functions SFB-EC
セーフティフィールドボックスSFB-ECは各デバイス・ポートには、4つの異なるコンフィギュレーション(タイプ)を選択することができます。 パラメータデータセット(タイプ)は、異なるセーフティスイッチギアのデバイスポートを構成するために使用されます。
すべての安全入力に対して、フィルタ/安定時間フィルタが内蔵されています。 安定時間フィルタ用のパラメータは、異なるパラメータデータセットタイプに対して固定されています。

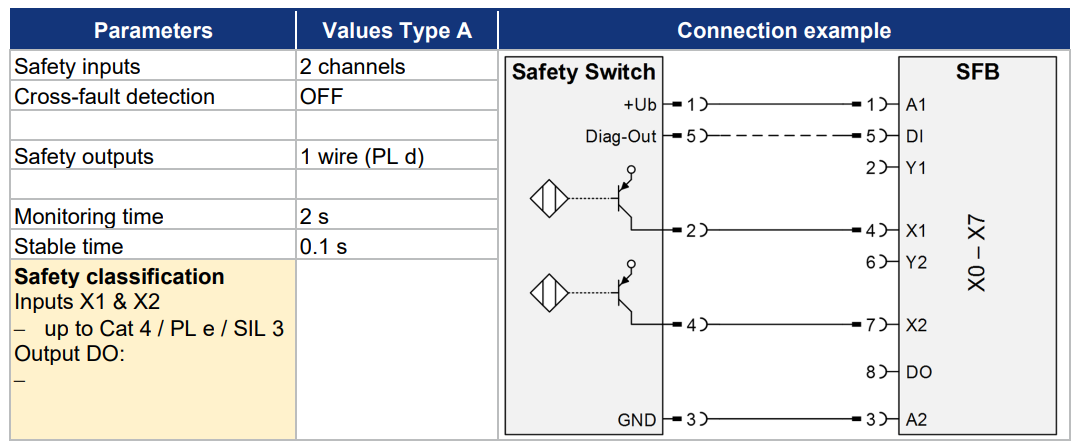
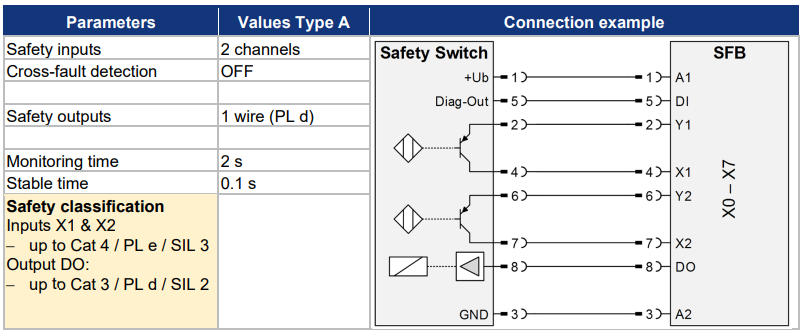
Parameter data set Type A, safety monitoring 1oo2
クロス故障検出: オフ / 安全スイッチギアが交差故障検出を処理します。
- 2チャンネルOSSD出力付き電子安全スイッチおよびセンサー用
- 電子ソレノイドインターロック用、2チャンネルOSSD出力、ロック解除機能1ワイヤー制御に最適
Parameter data set Type B, safety monitoring 1oo2
クロス故障検出: オフ / 安全スイッチギアが交差故障検出を処理します。
- 2チャンネルOSSD出力とロック解除機能の2線制御を備えた電子ソレノイドインターロック用
- セーフティリレーモジュール(SRB-E)用、2チャンネルセーフティ入力付き
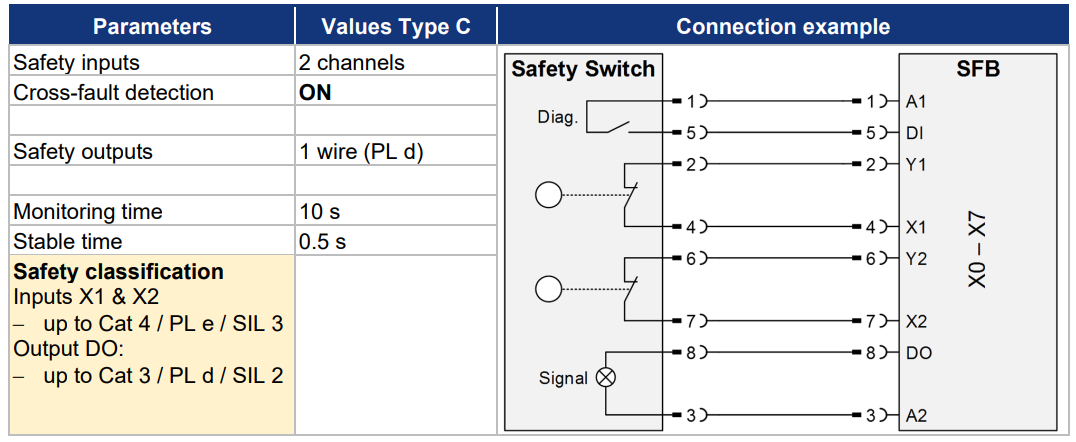
Parameter data set Type C, safety monitoring 1oo2
クロス故障検出: ON / SFB がクロスフォールト検出を処理します。
- 電気機械式セーフティスイッチおよびセンサー用、NC接点2個付き
- 電気機械式ソレノイドインターロック用、NC接点2個、およびロック解除機能の1線制御に最適
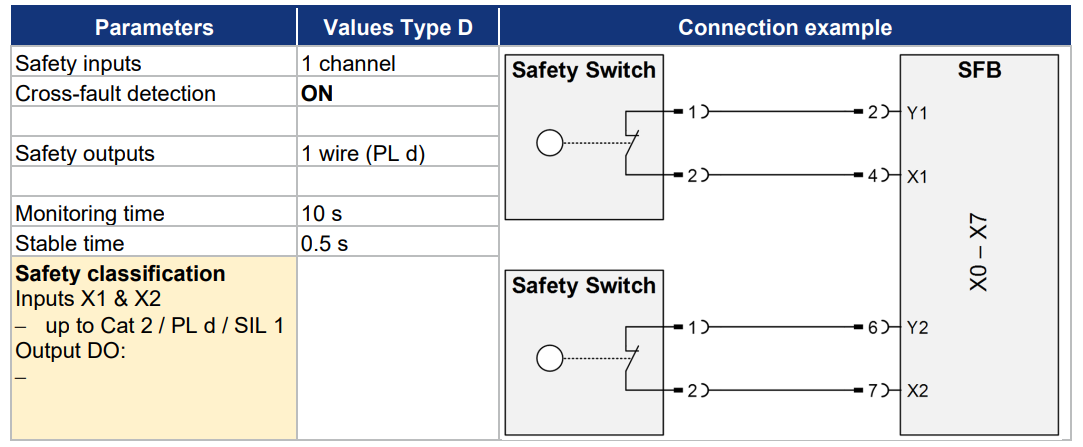
Parameter data set Type D, safety monitoring 1oo1
クロス故障検出: ON / SFB がクロスフォールト検出を処理します。
- NC接点1個付き個別電気機械式セーフティスイッチ2個用
Description stable time filter
安定した時間フィルターは、バウンシング・セーフガードに使用される。 安定時間フィルタは、バウンドするセーフガードが停止した状態、言い換えれば「安定」した状態になったことを自動的に検出する。
安定時間が経過したあと、両方の入力で一定のスイッチオン信号を受信すると、安全機能がオンになります。
そして接点付き安全開閉器には安定時間フィルタが必要で、電子式OSSDを備えた安全開閉器では、出力信号は通常内部でフィルタリングされます。
Wiring Exmaple
タイプA:電子OSSD付きセーフティセンサー、モニタリング1oo2
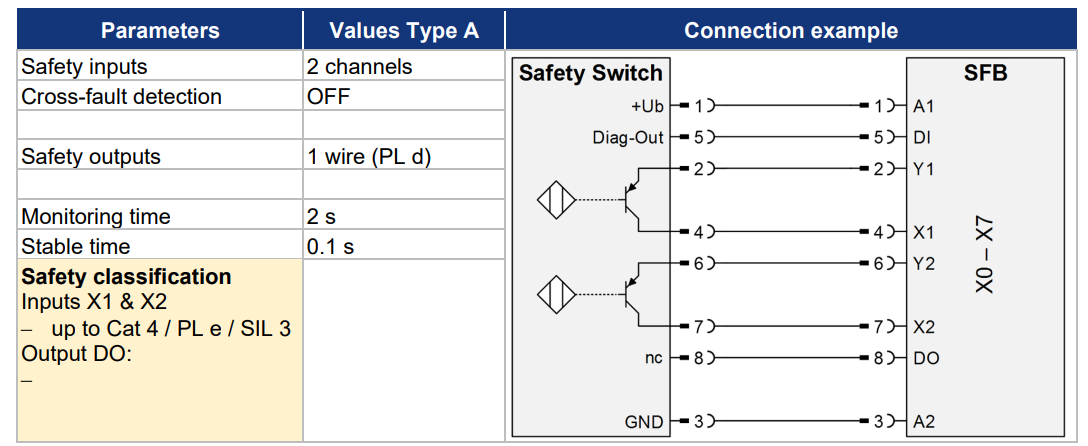
タイプA:電子OSSD付きセーフティセンサー、モニタリング1oo2
タイプC:ドライ接点相当のソレノイドインターロック、監視1oo2
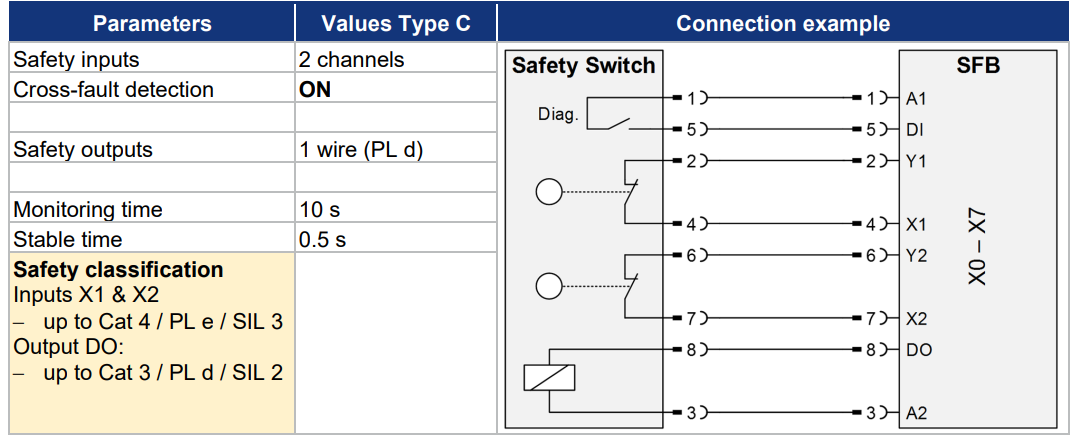
タイプC:ドライ接点相当安全スイッチ、監視1oo2
タイプD: セーフティスイッチ1個または2個、ドライ接点付き1チャンネル、モニタリング1oo1
X0-X7
こちらはSFB-EC-8M12-IOPのX0-X7のLayoutです。
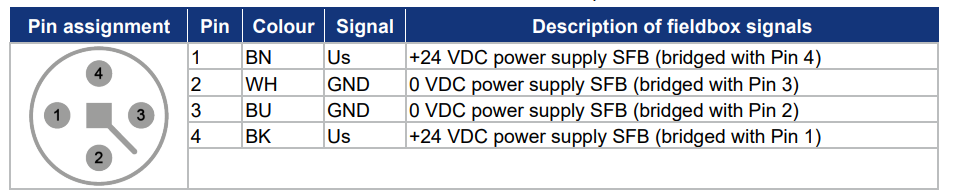
Power
こちらはSFB-EC-8M12-IOPのPower PortのLayoutです。
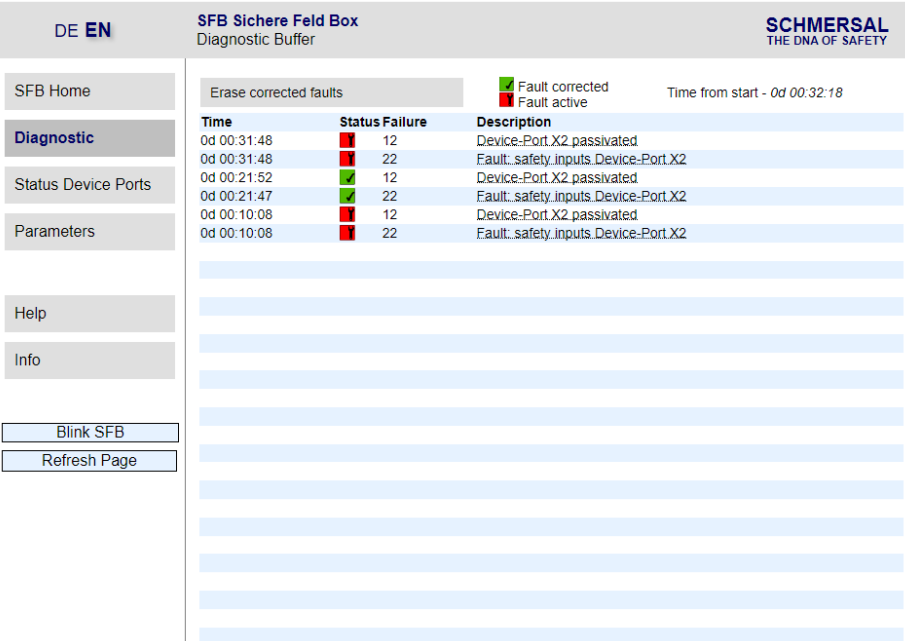
Web server
SFB-ECには、ステータスや診断データを表示するためのウェブサーバーが統合され、SFBのWebServerにアクセスするには、EoEサービスでデバイスのIP設定を行う必要があります。
AZM40Z-I2-ST-1P2P?
AZM40は、ユニークなロック機能を備えています。 このクランプ原理にはいくつかの利点があります。 ロッキングボルトとアクチュエーターは、面取りされた表面のみで接続されているため、横方向の力を補正しやすくなっています。

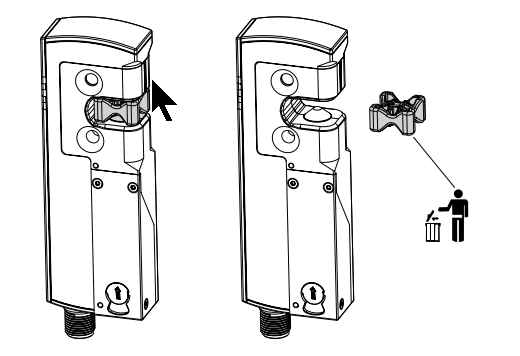
Before you use..
ソレノイドインターロックをエンドストップとして使用しないでください。その ロックは必ず取り外してください。
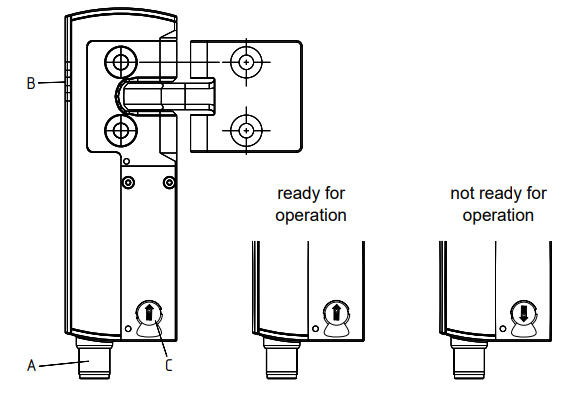
Layout
こちらはAZM40のドアロックLayoutです。
- 40mmプロファイルへの取り付けに最適化
- 左右対称取り付け、両側に取り付け可能
- 3方向から見えるLED
- 安全レベルを下げない直列配線
- アクチュエータまたはガードのロック監視
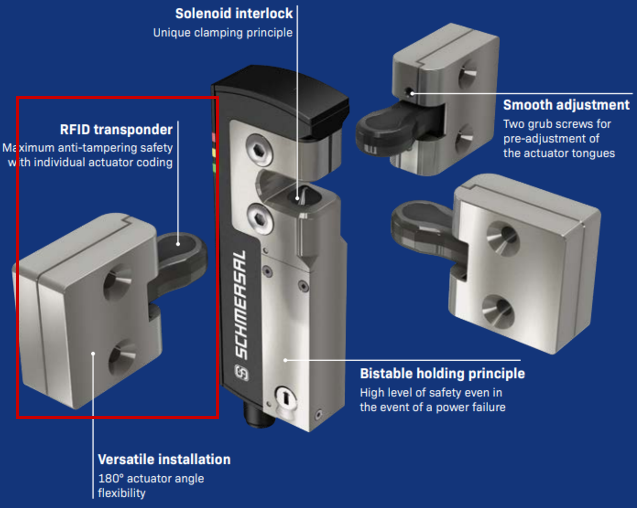
- RFID Transponderと合わせて使用
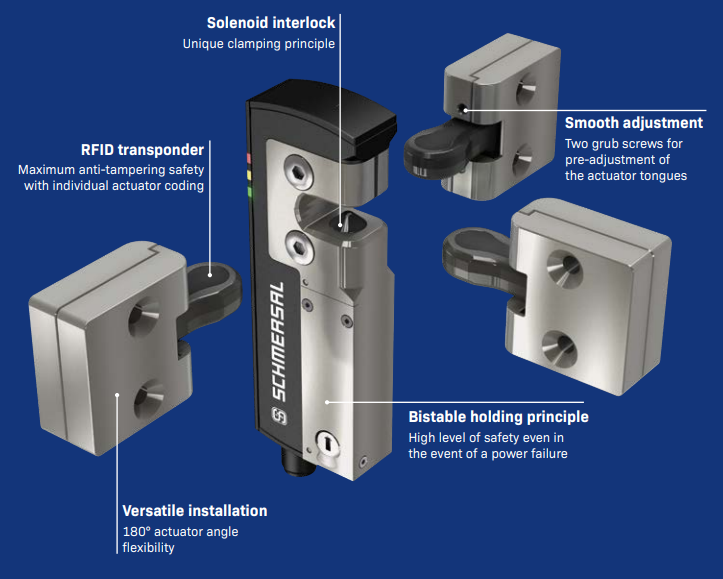
さらに、クランプロックにより、RFIDセンサーをロックボルトと反対側の中央に配置することもできます。 そのため、外部のRFIDフィールドや他のRFIDシステムからのエラーの影響を受けにくく、複数のデバイスを並べて設置することができる。
Actuator coding
個別にコード化されたソレノイドインターロックとアクチュエータは、以下のTeach-in手順が必要です:
- ソレノイド・インターロックの電圧供給を一旦切り、再度オンにする。
- 検出範囲にアクチュエータを認識させます。 ティーチ手順は、ソレノイドインターロック、緑色 LED 消灯、赤色 LED 点灯、黄色 LED 点滅(1Hz)で通知されます。
- 10秒後、黄色の周期的な短い点滅(3 Hz)が、ソレノイド・インターロックの作動電圧のスイッチオフを要求します。
注意するのは5分以内に電圧が切れない場合、ソレノイドインターロックは “ティーチイン “手順をキャンセルし、5回の赤色点滅で誤作動を知らせることです。 - 動作電圧の再投入後、ティーチングされたアクチュエータコードを有効にするために、もう一度アクチュエータを検出する必要があります。 このようにして、起動されたコードは確定的に保存されます。

GUARD LOCKING MONITORED
AZM40Zソレノイドインターロックのセーフティ出力は、セーフティガードが閉じてインターロックがロックされているときのみ有効になります。 こちらはAZM40Zの動作Flowです。
LED
継続的なセルフテストにより、ソレノイドインターロックと2チャンネル安全出力の機能が保証されます。 安全出力でのエラーは、短絡も含め、内蔵された3色診断LEDの異なる色または点滅パルスで通知されます。 過度の周囲温度のような一般的なエラーも検出され、表示されます。

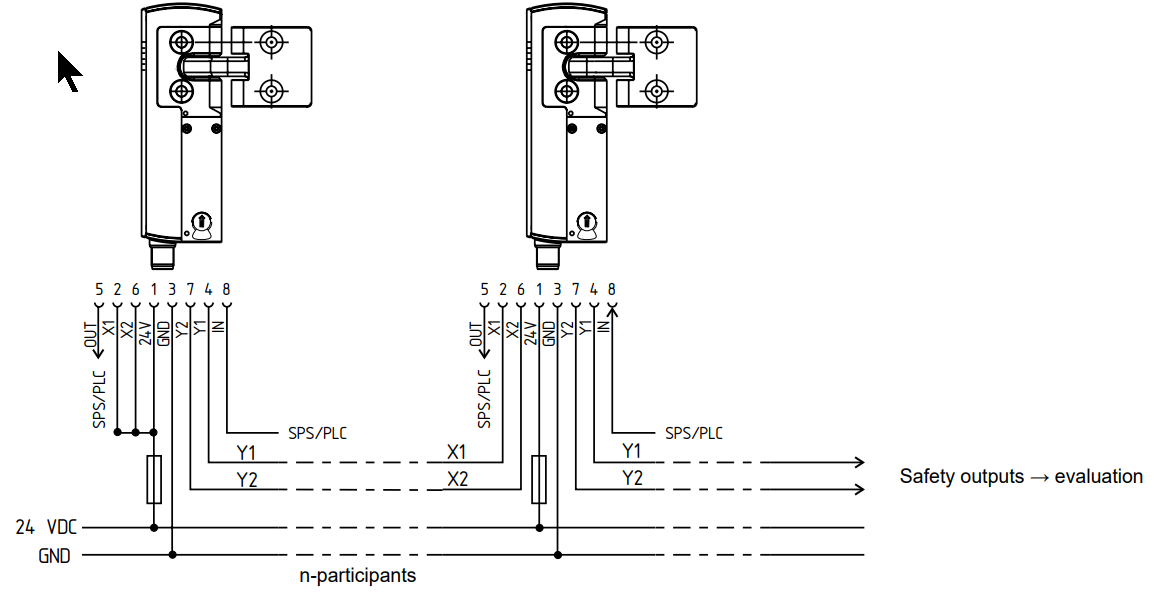
Wiring example
電圧は、チェーンの末端安全コンポーネントの両方の安全入力に供給されます(安全監視モジュールから考慮)。 最初のセーフティコンポーネントのセーフティ出力は、セーフティモニタモジュールに配線されています。
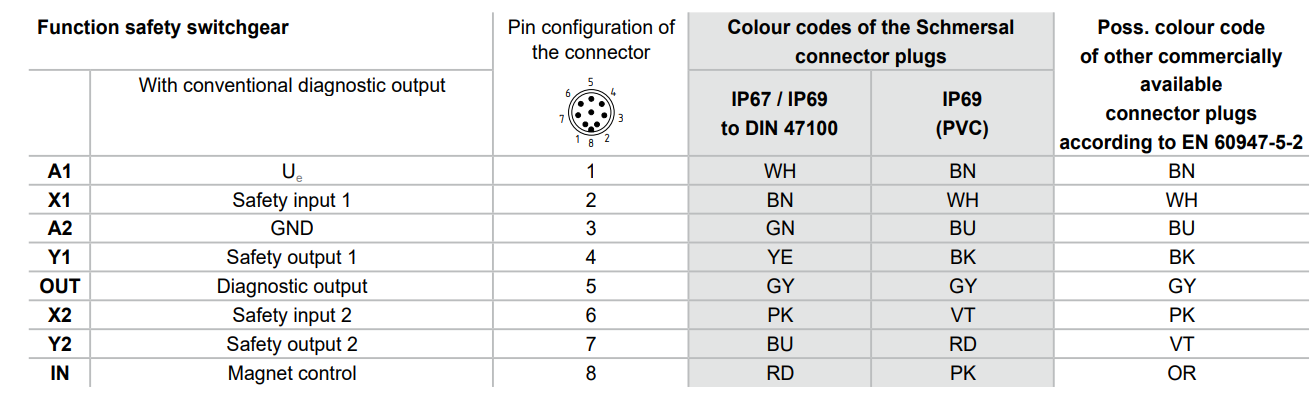
Connector
AZM40Zは8PinのM12 Connectorになります。
Manual release
設置やメンテナンスのために、ソレノイドインターロックは非通電状態でロックを解除することができます。 ソレノイドインターロックは、補助リリースを反時計回りに回すことで解除されます。通常のロック機能は、手動リリースを元の位置に戻した後にのみ復帰します。
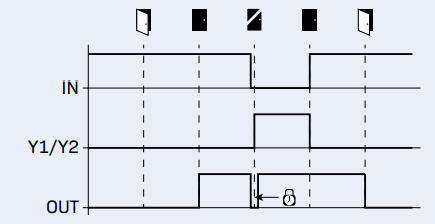
Magnet control
双安定インターロックは、IN信号(=24V)の動作設定により解除される。 IN信号が設定されていない(=0V)場合、ソレノイドインターロックに正しいアクチュエータが挿入されている限り、ソレノイドインターロックはロック状態になります。
Implementation
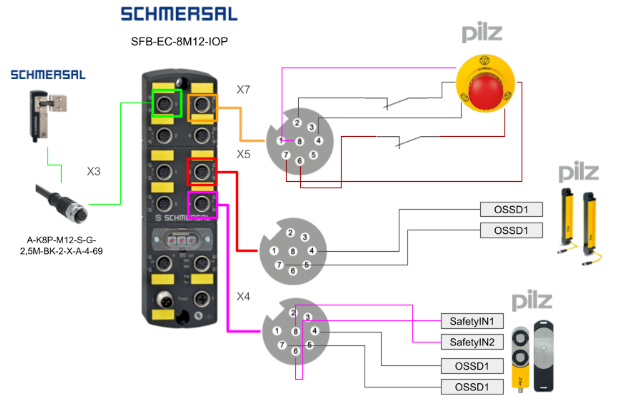
Wiring
こちらは今回記事での配線になります。
TwinCAT Side
TwinCAT3プロジェクト側を構築します。
Download ESI File
下記のLinkからSchmersalのSFB-EC-8M12‐IOPのESI FileをDownloadしてください。
https://products.schmersal.com/en_IO/sfb-ec-8m12-iop-103047531.html
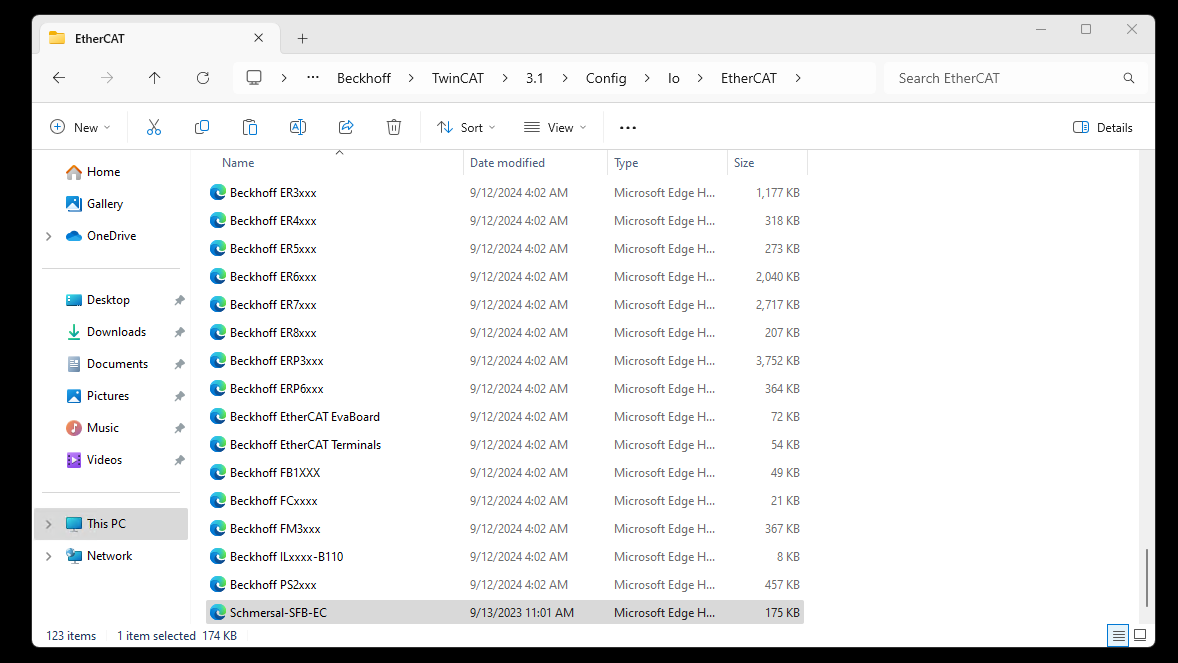
Install ESI File
先ほどDownloadしたESI Fileを下記のDirectoryに格納してください。
(自分が使用してるのはTwinCAT3 4026です)
C:\Program Files (x86)\Beckhoff\TwinCAT\3.1\Config\Io\EtherCAT
Reload ESI File
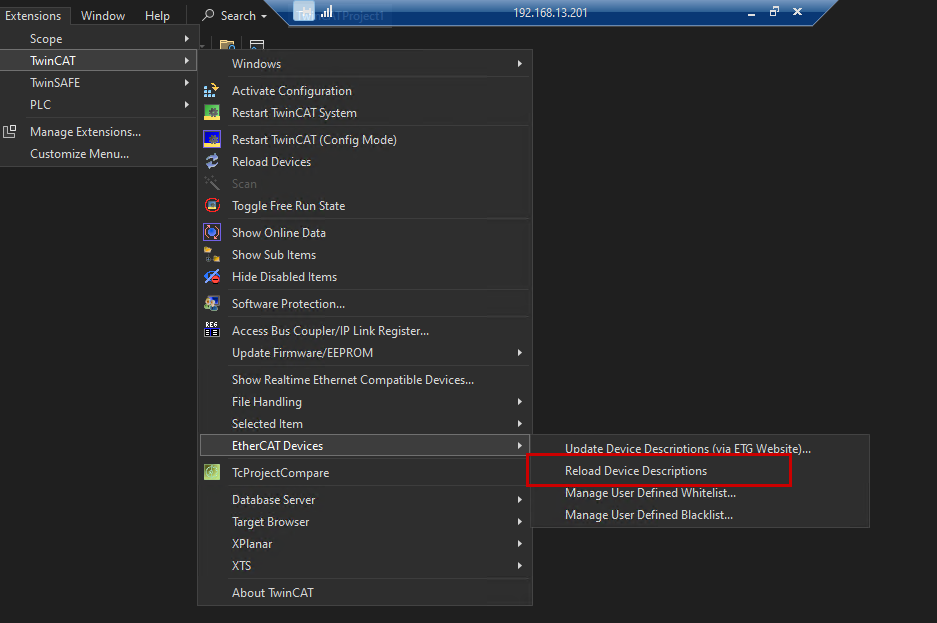
TwinCAT3Wを起動し、Extensions>TwinCAT>EtherCAT Devices>Reload Device DescriptionsでESI Fileを再ロードします。
Add EtherCAT Master
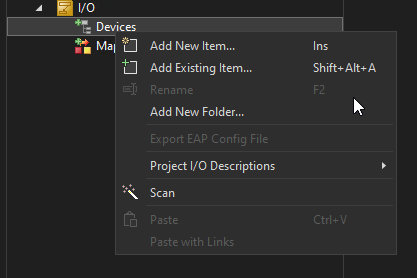
EtherCAT Masterを追加するため、I/O>Devices>Add New Itemします。
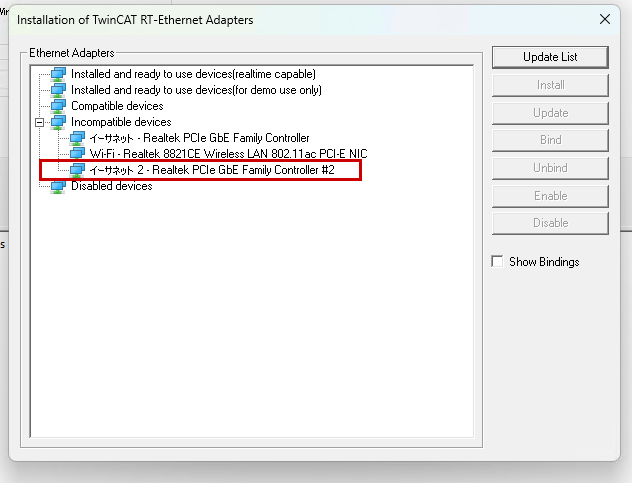
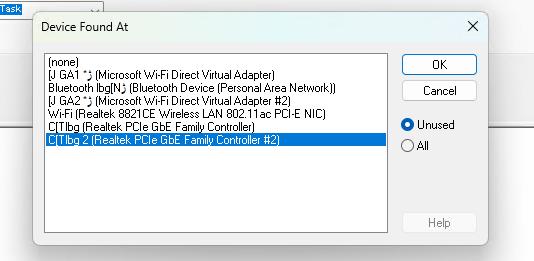
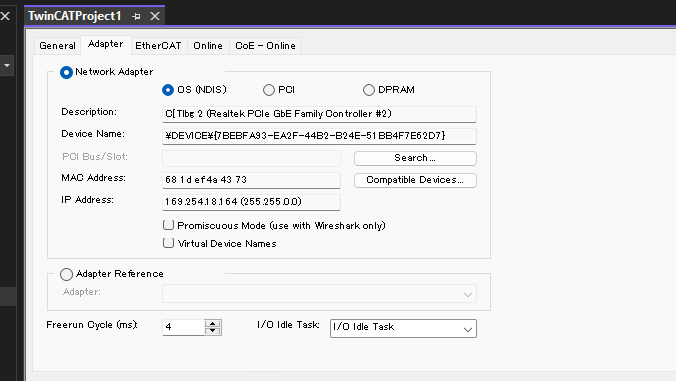
EtherCAT Masterとして使用するEthernet Interfaceを設定します。今回はイーサネット2を使用しますが、まだRT Ethernet Driverがインストールされていないので、そのInterfaceをクリックしてください。
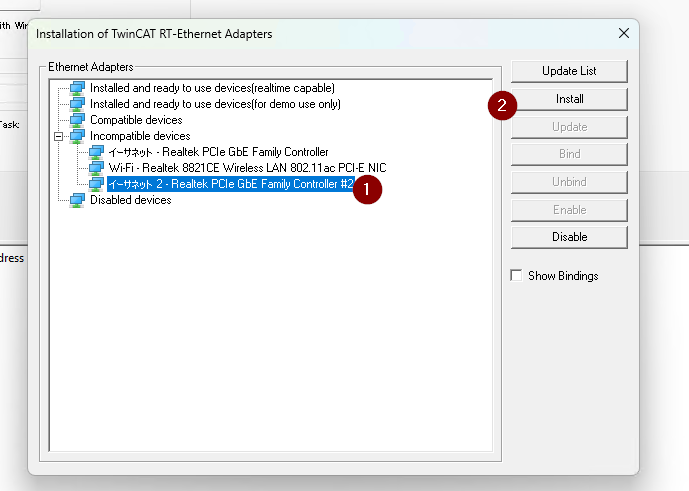
Installをクリックします。
それでEthernet2を設定できるようになりました。
Done!
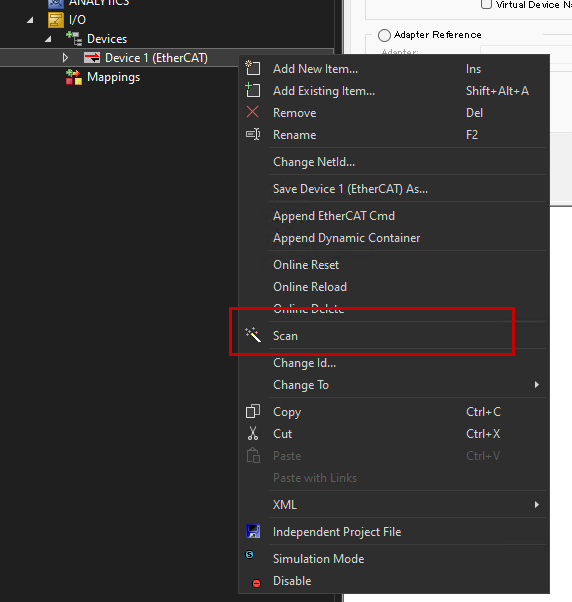
Scan
次はEtherCATのScan機能を使用しネットワーク内のEtherCAT Slaveを検索します。
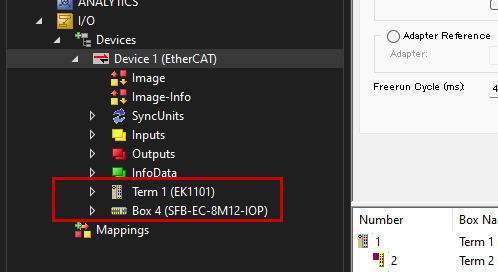
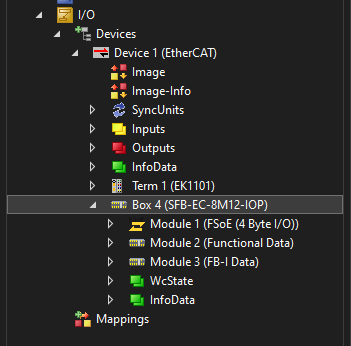
Done!BeckhoffのEtherCAT CouplerEK1101とSchmersalのSFB-EC-8M12-IOPを検出できました。
EoE Configuration
SchmersalのSFB-EC-8M12-IOPのEoE(Ethernet Over EtherCAT)機能を有効化し、Webserverにアクセスできるようにします。
EtherCAT>Advanced Settingsをクリックします。
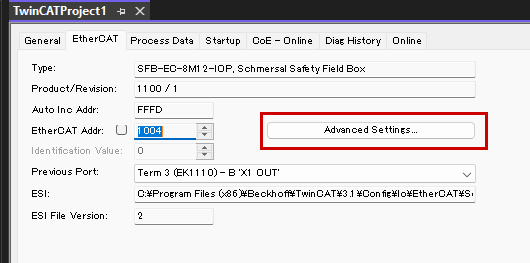
こちらはEtherCAT NodeのAdvanced Settings画面になります。
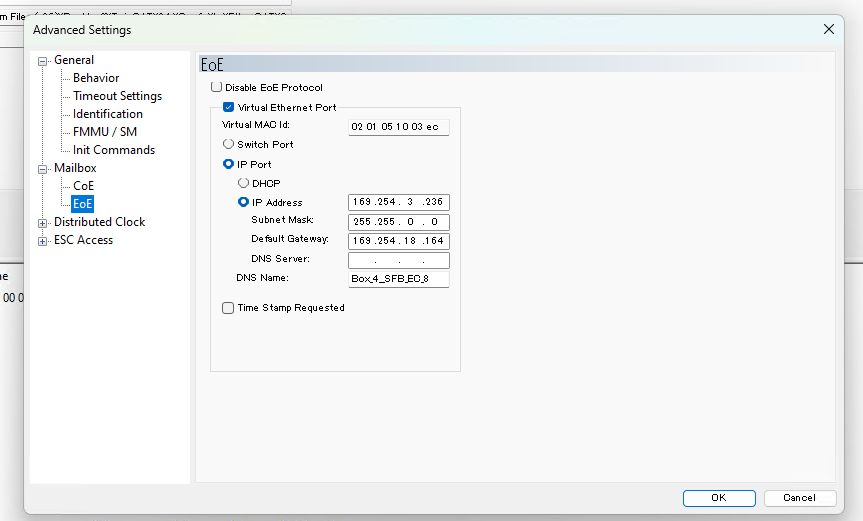
Mailbox>EoEでIPアドレスをアプリケーションに合わせて設定しましょう。
Add PLC
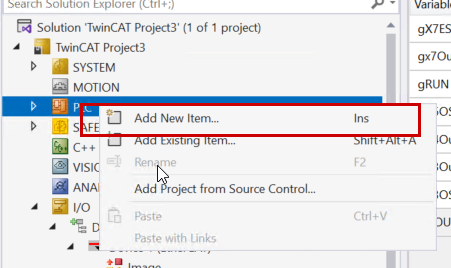
次はPLCプロジェクトを追加するため、PLC>Add new Itemします。
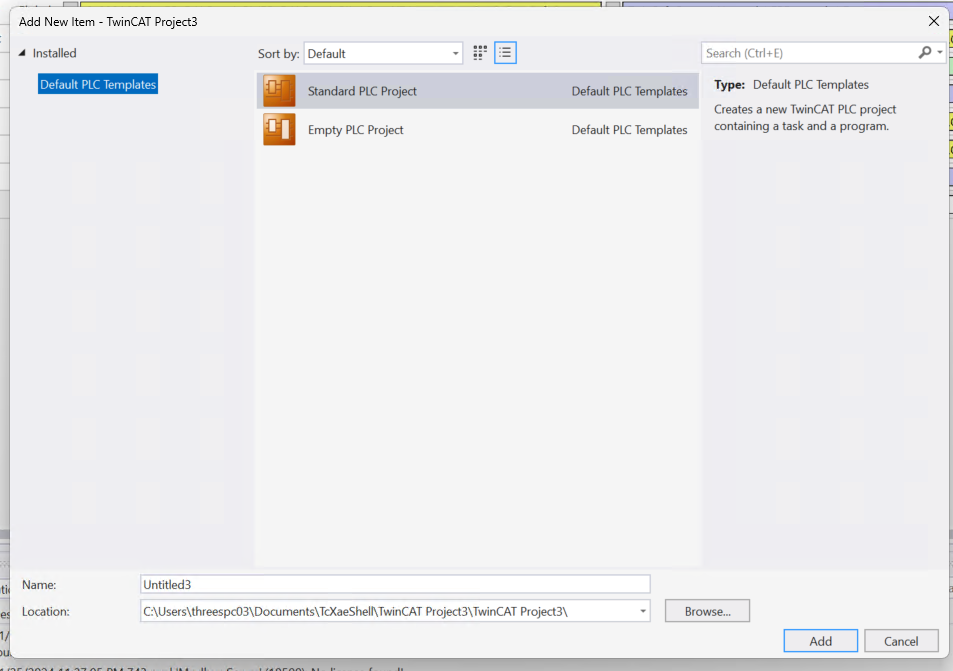
Standard PLC Projectを選び>Addで追加します。
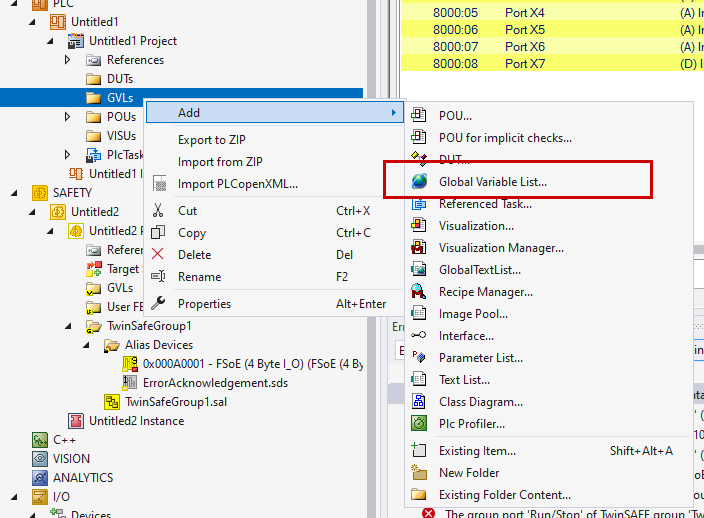
Add GVL
今度はGlobal Variable ListをPLCプロジェクトに追加します。
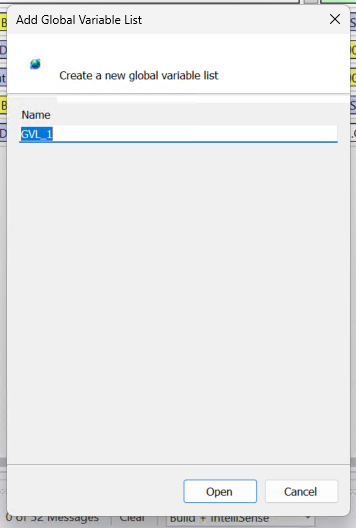
GVL名を入力し、Addで進みます。
GVL内にSFB-EC-8M12-IOPの非安全変数とEL6910に送信するRUN/ACK変数などを定義します。
| {attribute ‘qualified_only’} VAR_GLOBAL RUN AT %Q*:BOOL; Ack AT %Q*:BOOL; DoorLockOSSD AT %I*:BOOL; SFB_PortQualifier AT %I*:DUT_8BitDevices; SFB_DiagnosisData AT %I*:DUT_SFBDiagnosisData; ErroCode AT %I*:USINT; SFB_Ack AT %Q*:BOOL; END_VAR |
POU
こちらはSFB-EC-8M12-IOPに500msのリセットパルスを送信するプログラムだけです。
| PROGRAM MAIN VAR xON:BOOL; Ton1:TON; END_VAR GVL.SFB_Ack:=xON ; Ton1( IN:=xON ,PT:=T#500MS ); IF Ton1.Q THEN xON:=FALSE; END_IF |
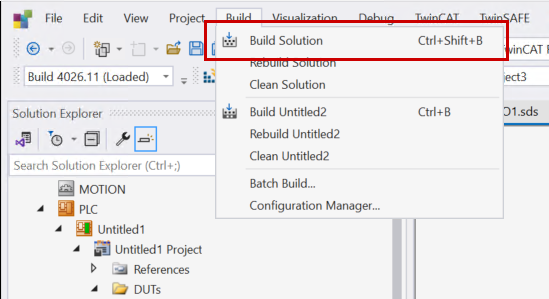
Build
Build>Build Solutionでプロジェクトをコンパイルします。
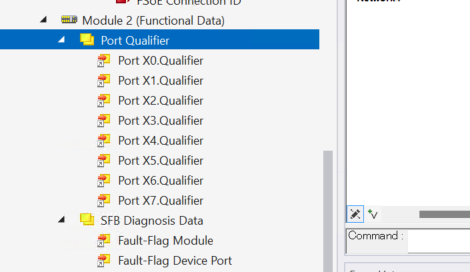
Link
次はSFB-EC-8M12-IOPのPort Qualifierや診断情報とPLCプロジェクトのGVLをMappingします。
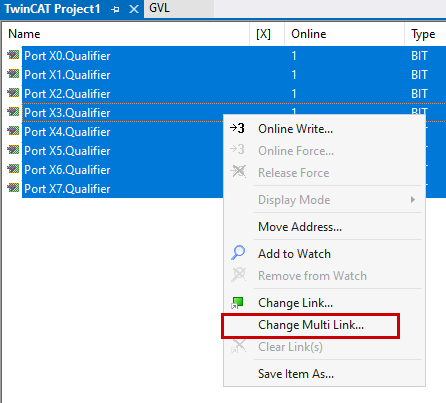
変数をまとめてMappingしたい場合は、すべての変数を選び>Change Multi Linkをクリックします。
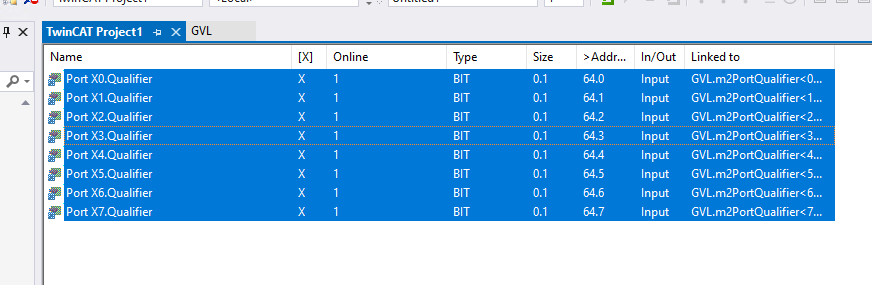
Done!Mappingされた変数にはXのマークがついています。
Add Safety Project
次はEL6910側を構築します。
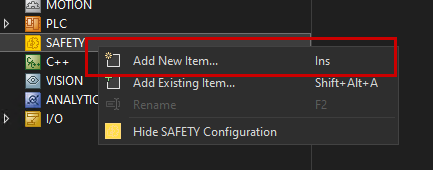
SAFETY>Add New ItemでSafety プロジェクトを追加します。
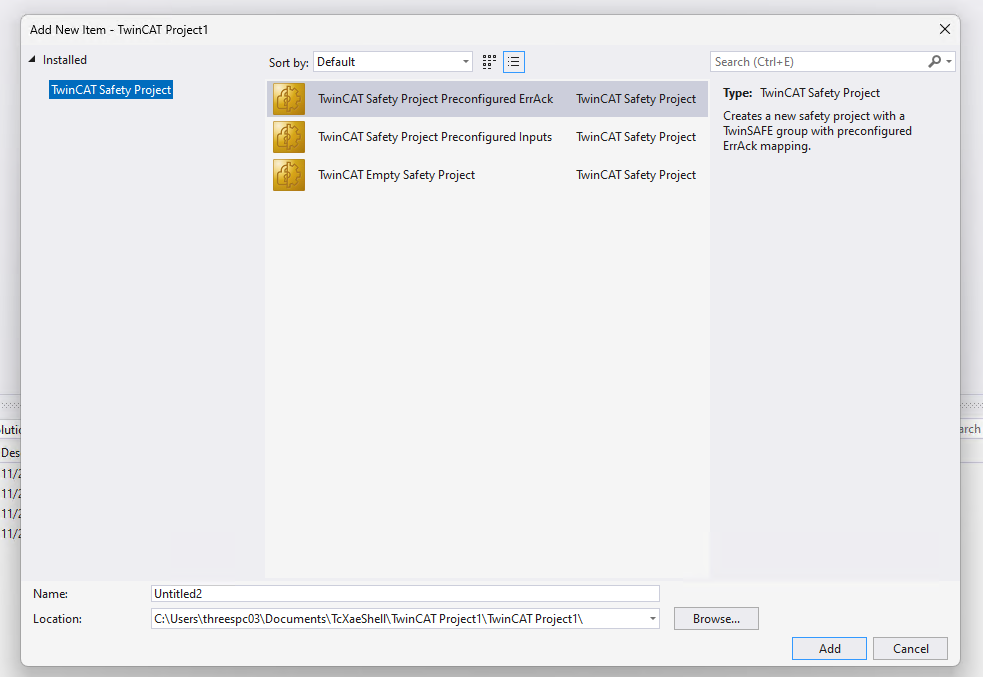
TwinCAT Safety Project Preconfigured ErrAckを選び>Addで追加します。
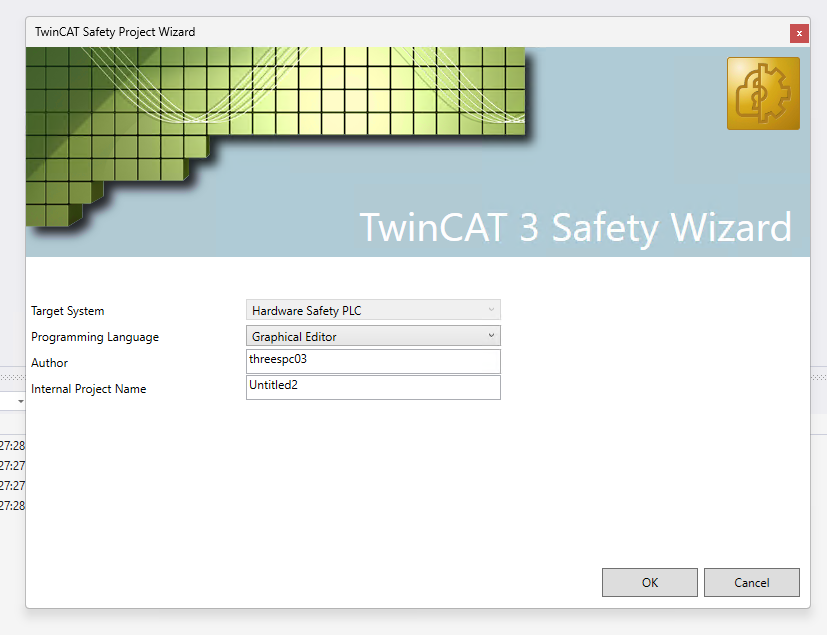
Target SystemにHardware Safety PLCを選択し、OKでプロジェクトを作成しましょう。
Configure Target System
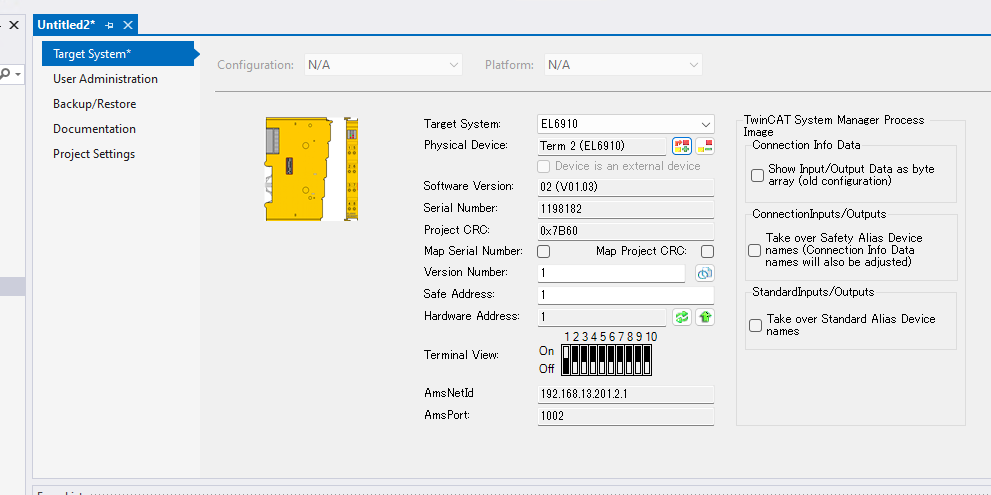
Safety プロジェクトに使用するFSoE Masterを設定する必要があり、Target Systemをクリックしてください。
こちらはTarget Systemの設定画面になります。
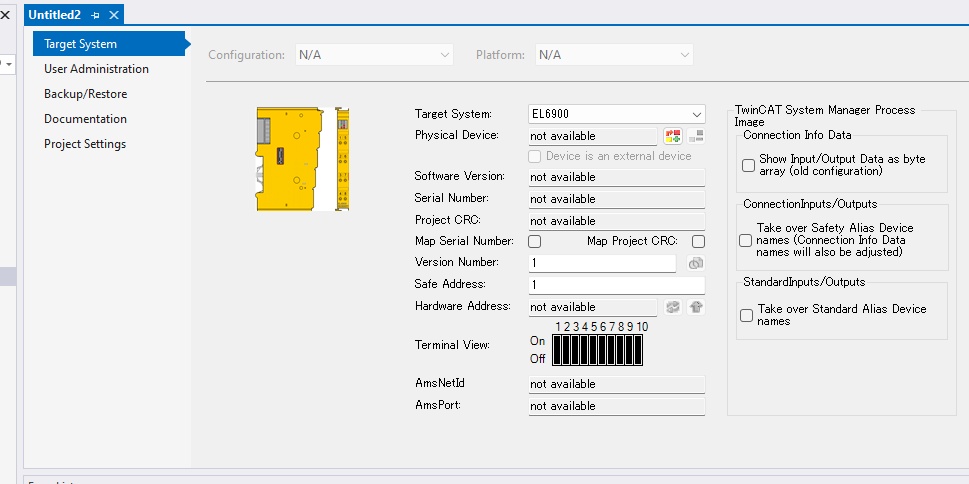
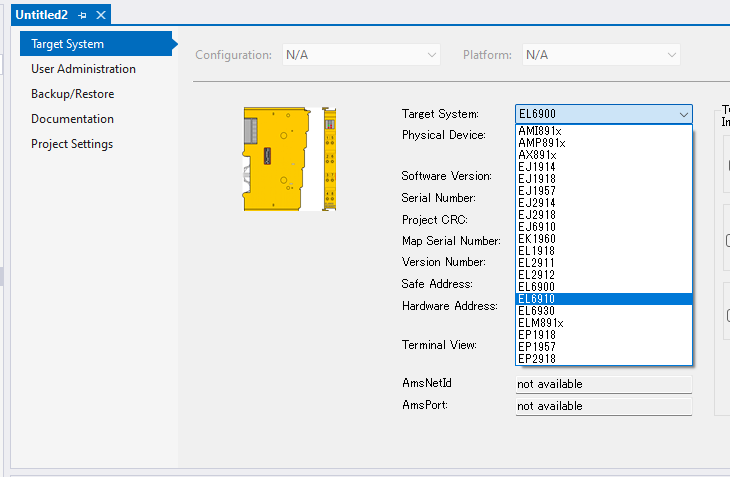
Target System
Target SystemのDrop-listからEL6910を設定してください。
Select Physical Device
次はPhysical Deviceのボタンをクリックします。
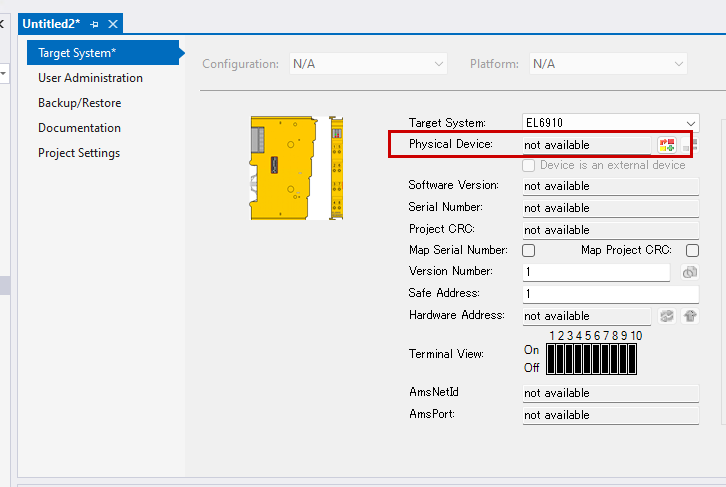
EtherCATネットワーク内のEL6910を設定します。
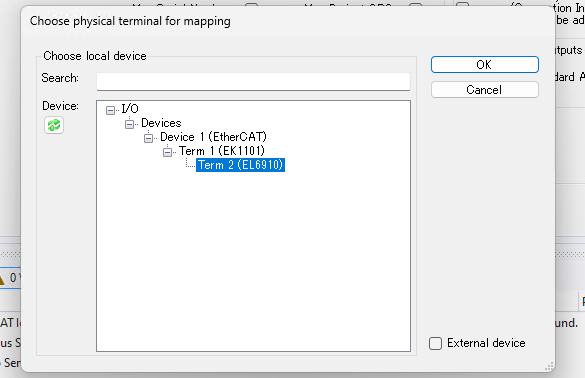
Done!EL6910のFSoE Addressなども取得できました。
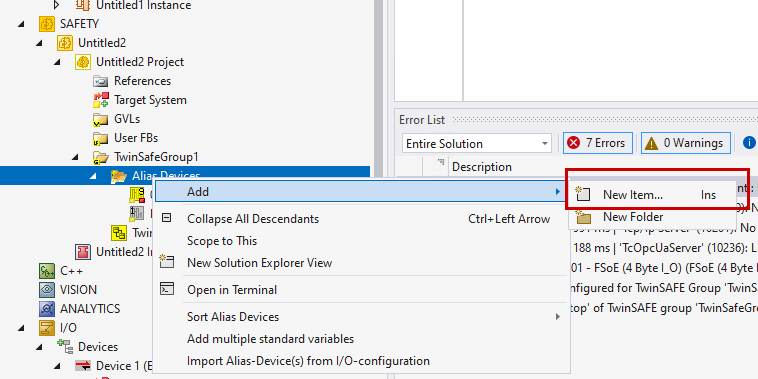
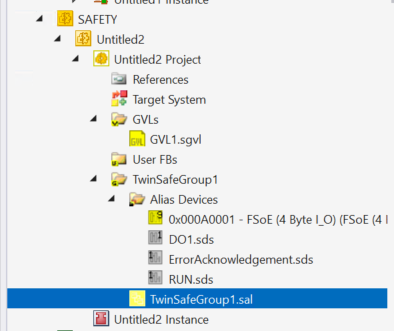
Add Alias Devices Schmersal
今度はSchmersalのSFB-EC-8M12-IOPを Safetyプロジェクトに追加します。
Alias Devices>Add>New itemで新規デバイスを挿入します。
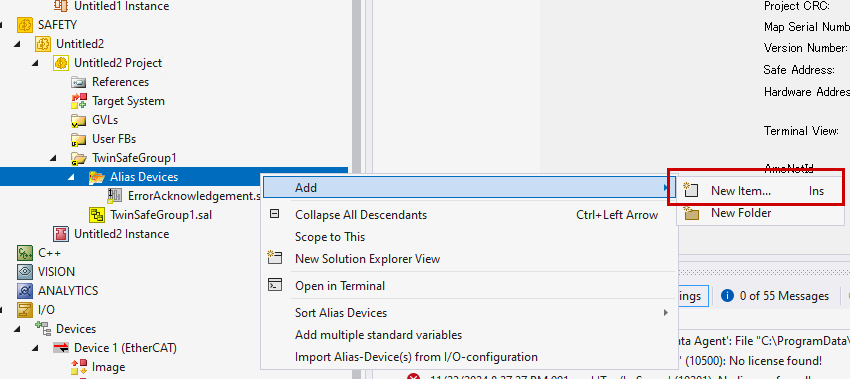
Safety>EtherCAT>K.A Schmersal GmbH>0x000A001を追加しましょう。
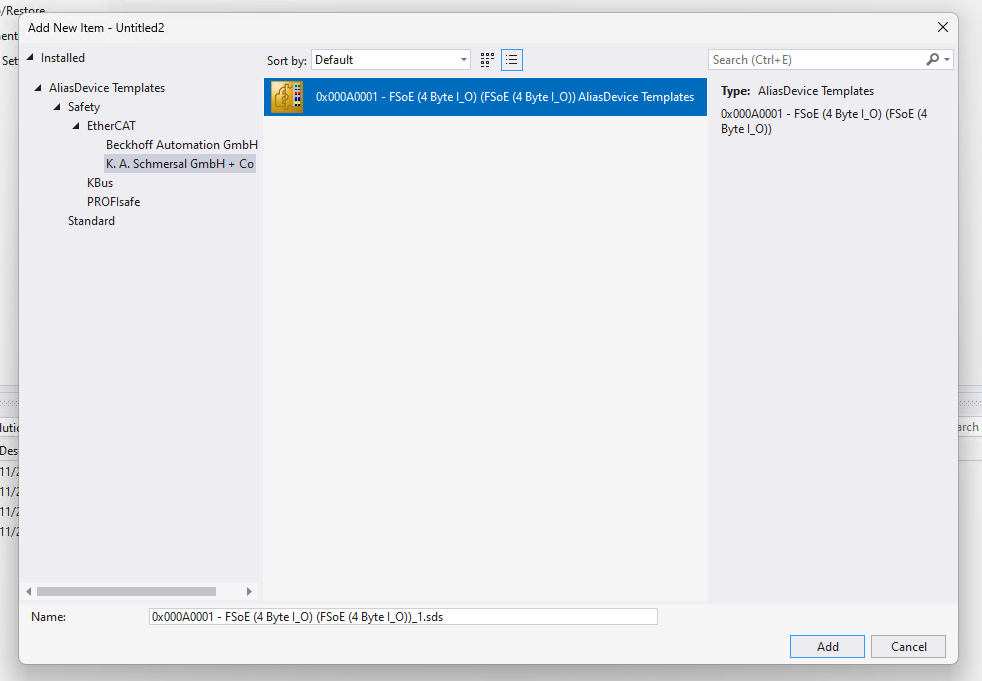
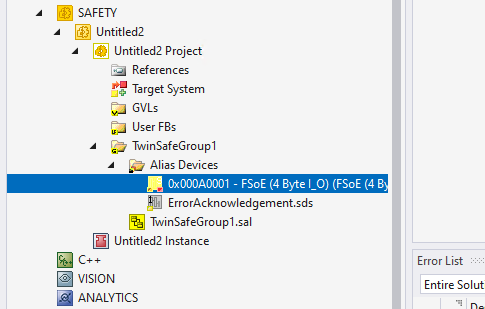
Done!
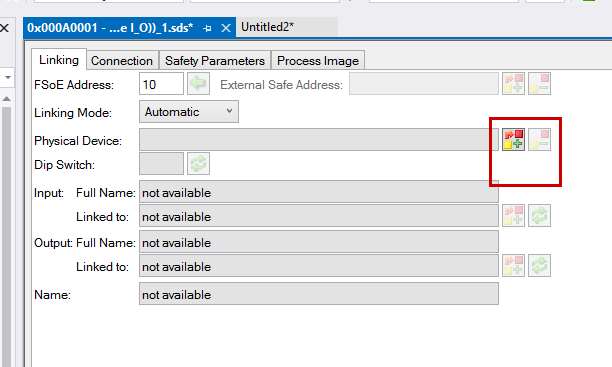
これからはSchmersalのConnectionパラメータとApplicationパラメータを設定します。
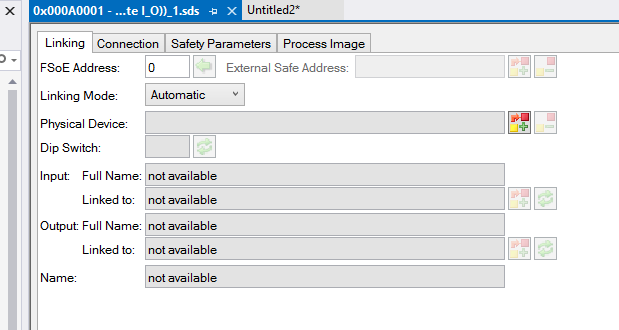
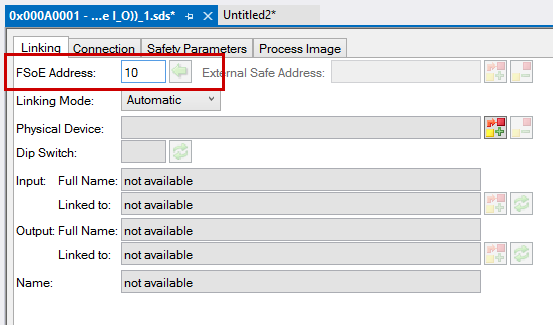
FSoE Address
FSoEのアドレスはSchmersalのSFB-EC-8M12-IOPのロータリースイッチ設定に合わせて設定してください。
Physical Device
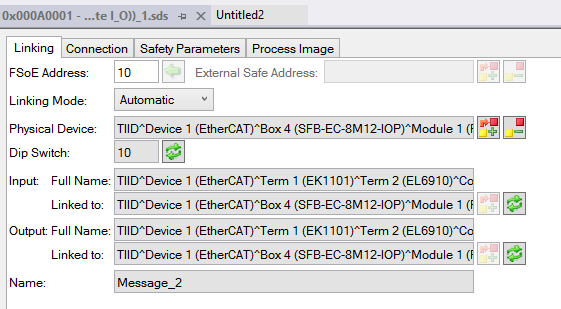
次はPhysical DeviceをクリックしEtherCAT ネットワーク内のSFB-EC-8M12-IOPを選択します。
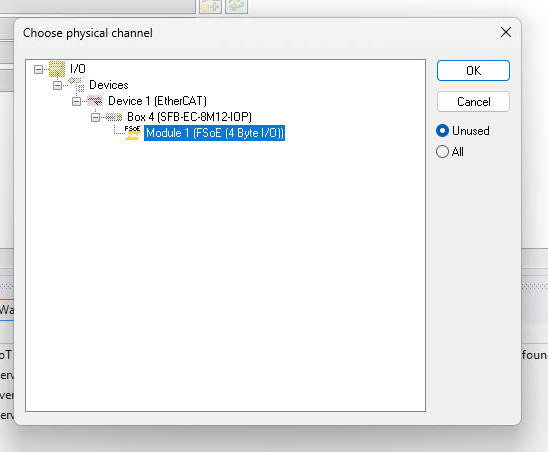
Done!
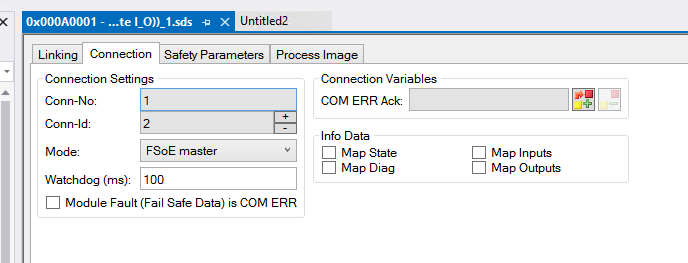
Watchdog(ms)
Conenction TabにConn-IdとWatchdog(ms)をアプリケーションに合わせて設定してください。
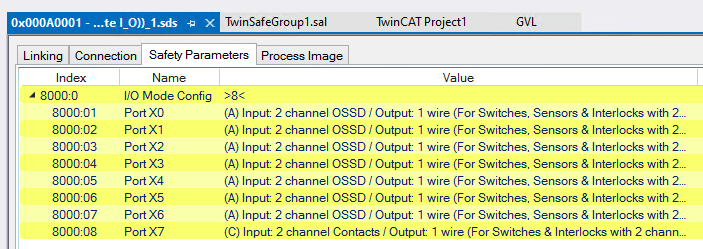
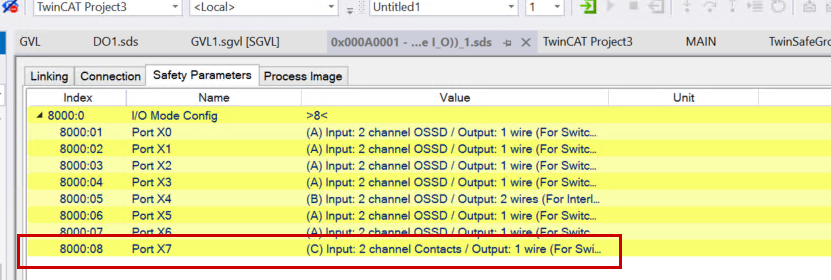
Safety Paramter
Safety Parameters Tabを開き、各Portのオペレーションモードを設定します。
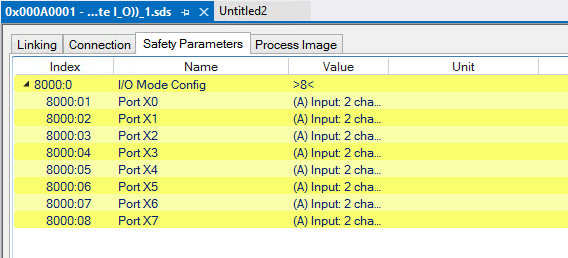
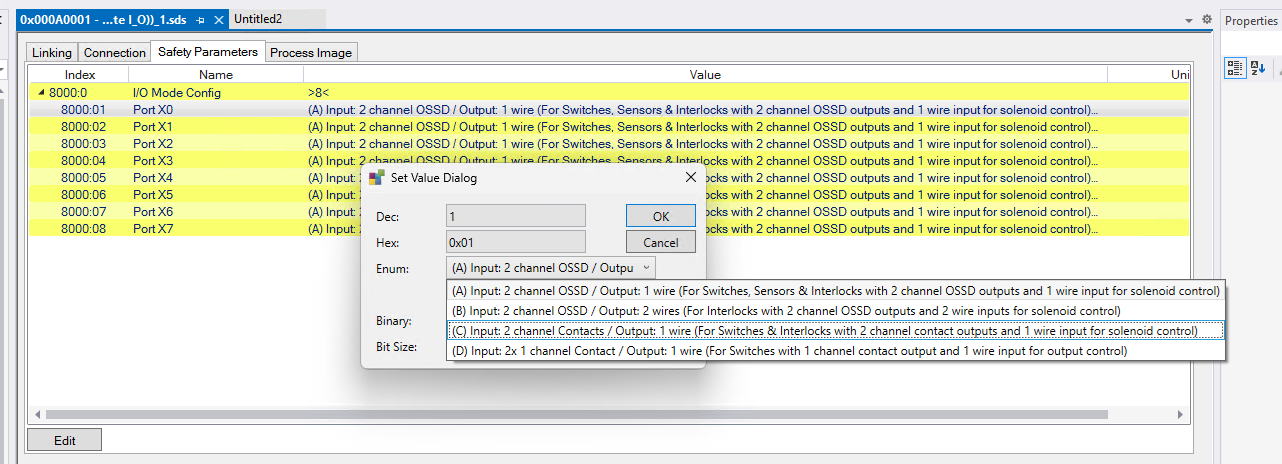
各PortのValue欄をダブルクリックすればDrop-Listから適切な設定を行うことができます。
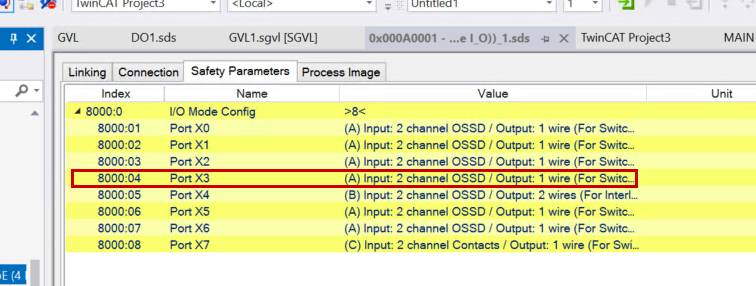
X3
PortX3はSchmersalのAZM40Z-I2-ST-1P2Pと接続しています。
PortX3をMode Aに設定します。
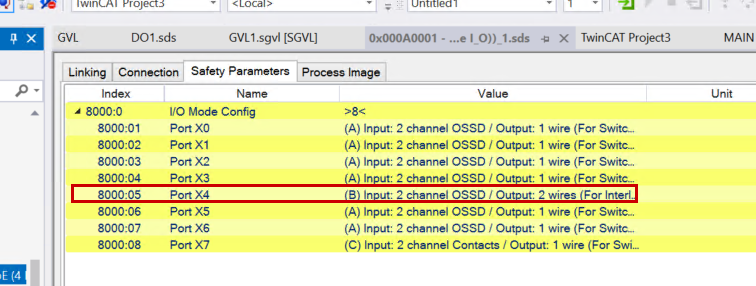
X4
X4はPilzのドアロックと接続しています。
PortX4はMode Bに設定します。
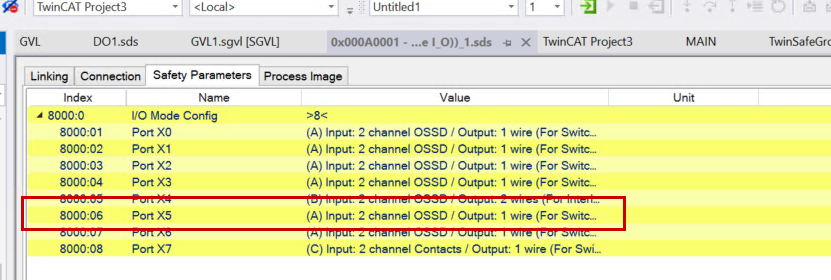
X5
X5はPilzのセーフティライトカーテンと接続しています。
PortX5はMode Aに設定します。
X7
X7は非常停止の入出力と接続しています。
PortX7はMode Cに設定します。
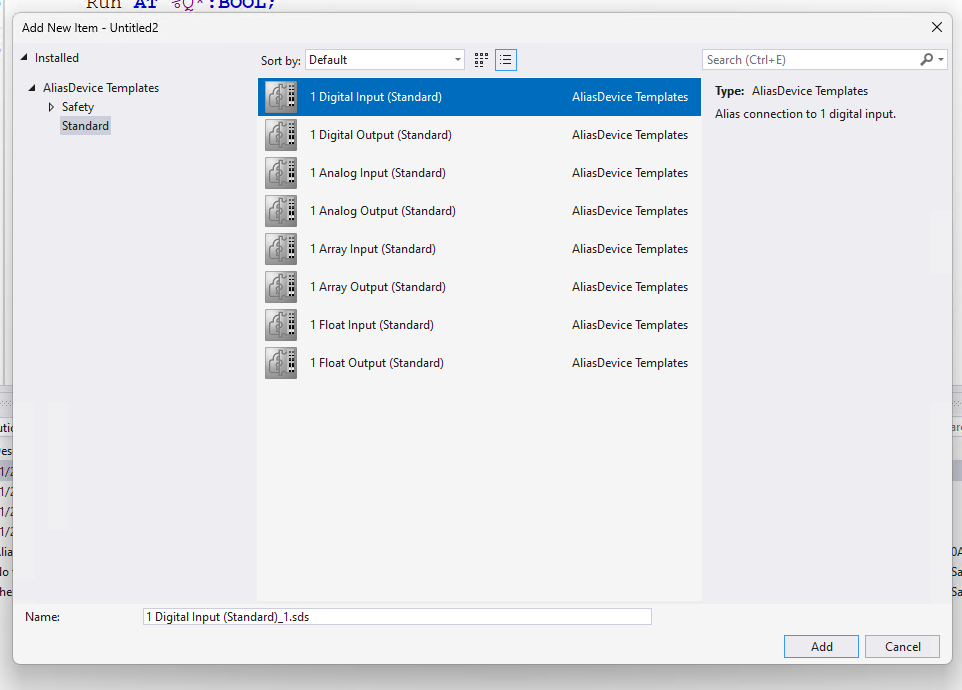
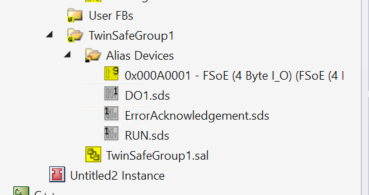
Add Normal
Normal TwinCAT RuntimeのRun・ACKまたDoorロックのOSSD出力を取得するため、Non-Safetyデータを作成します。
StandardでDigital Iput/Outputを追加します。
Done!
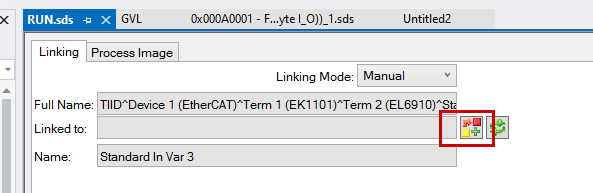
例えばRUN変数とTwinCAT PLC Runtimeの変数と繋がりたい場合、Linked toのボタンをクリックしてください。
GVL.Runを選択してください。
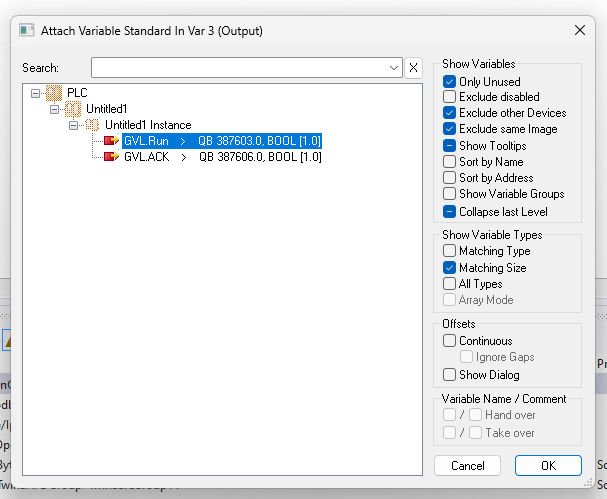
Done!他の変数も同じの手順で設定してください。

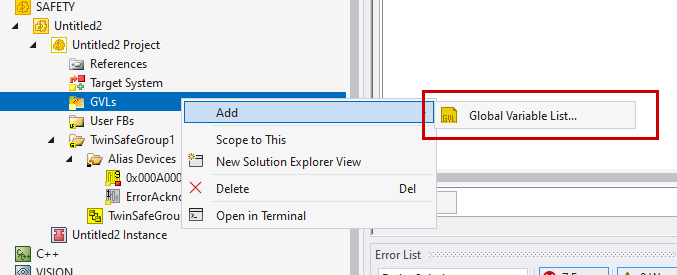
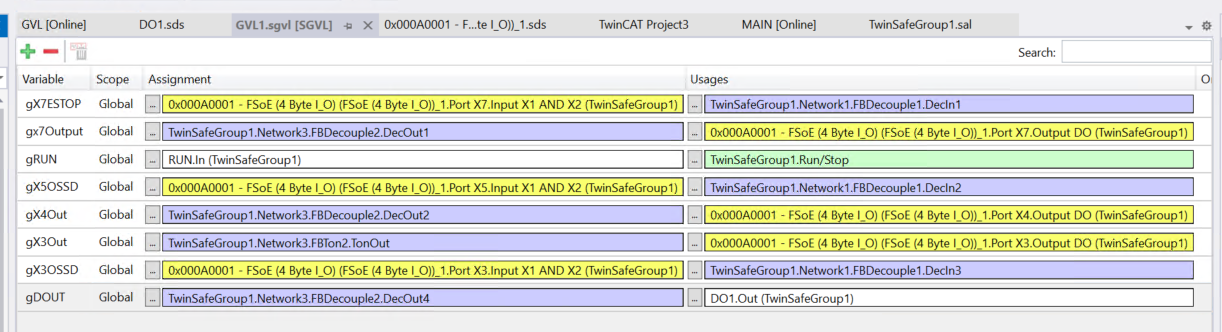
Add Global Variable List
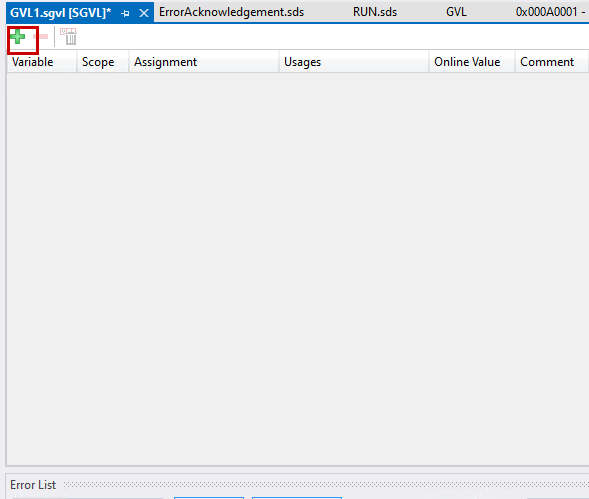
安全プログラム用の変数を定義するため、GVLs>Add>Global Variable Listをくりっくします。
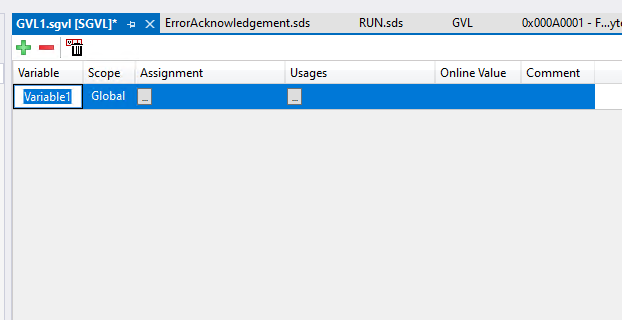
+ボタンで変数を追加します。
Done!
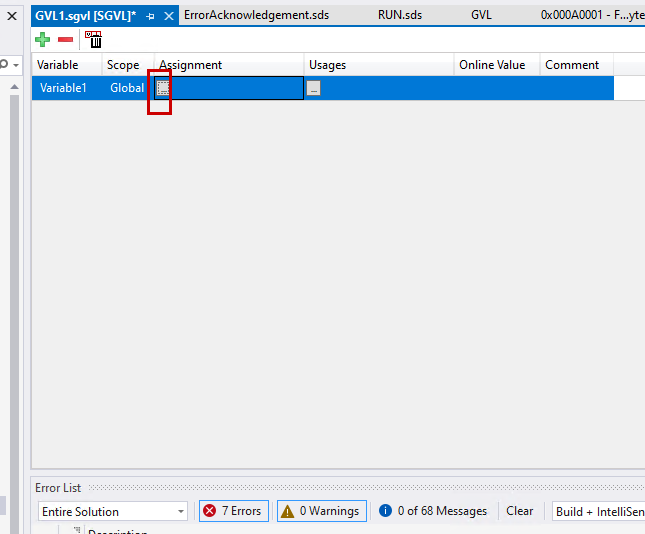
Assignmentをクリックし該当する安全変数とつながる変数を設定します。
この変数はSFB-EC-8M12-IOPのPort X7.Input X1 AND X2(つまりPort7のX1、X2入力同時にONする信号)と紐つけます。
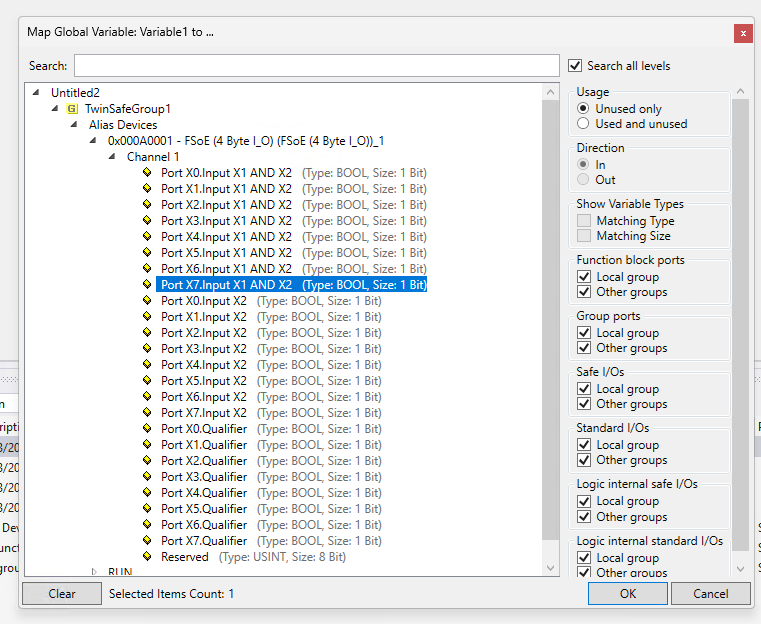
Done!他の変数も同じ手順で定義しましょう。
- gX7ESTOP:Port X7の非常停止入力信号
- gX7Output:Port X7の出力信号
- gRUN:Safety GroupのRUN信号
- gX5OSDD:Port X5のOSSD 入力信号
- gX4Out:Port X4のSafety Output信号
- gX3Out:Port X3のドアロック信号
- gX3OSSD:Port X3のドアロックOSSD信号
- gDOUT:Normal TwinCAT Runtimeに渡す、Port X3 OSSDの信号
Safety Program
Safety プログラムを作成するため、TwinSafeGroup1.salを開きます。
こちらは今回記事で作成した安全プログラムです。
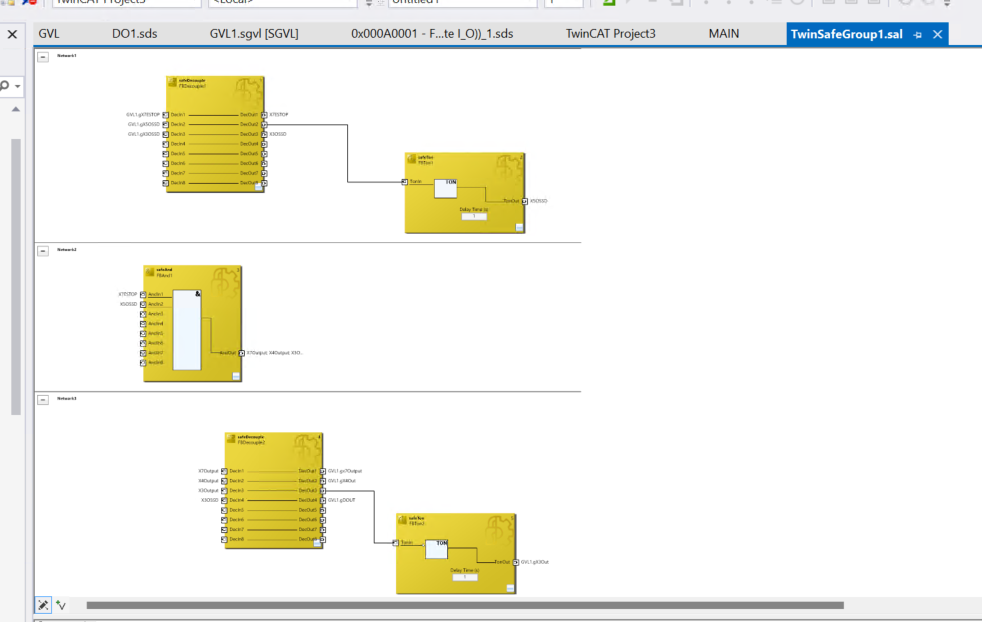
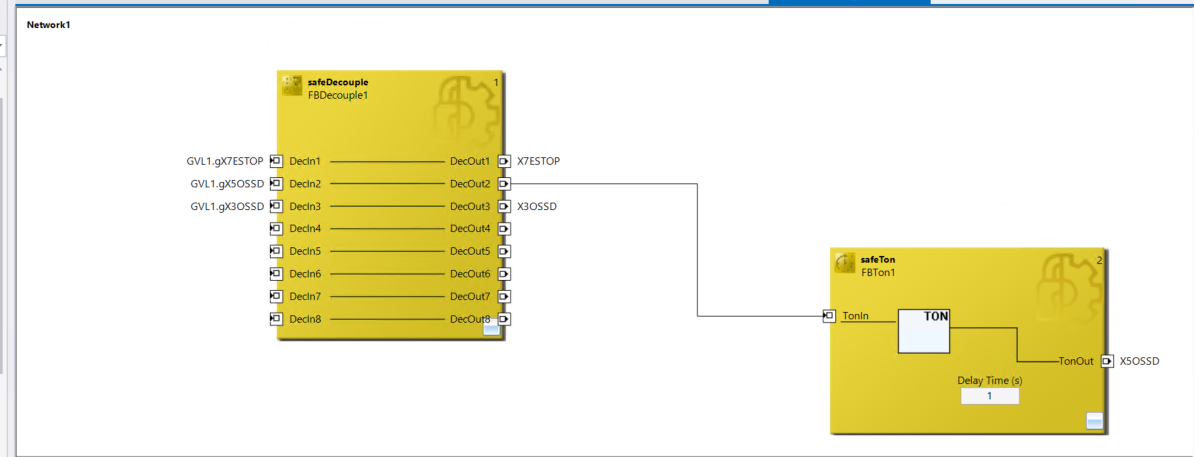
Network1
Network1は安全入力信号をSafeDecouple FB経由で内部変数に変換します。
また、Port X5と繋がってるOSSD信号はSafetTonで遅延ONにします。
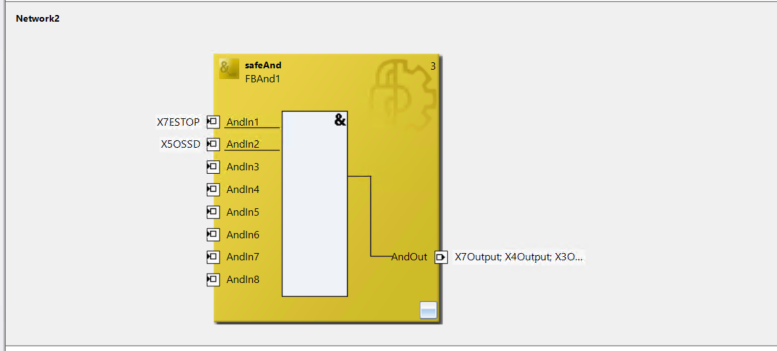
Network2
ネットワーク2はSafetAnd FBを使用し、ESTOP・OSSD信号が来たら出力するようにします。
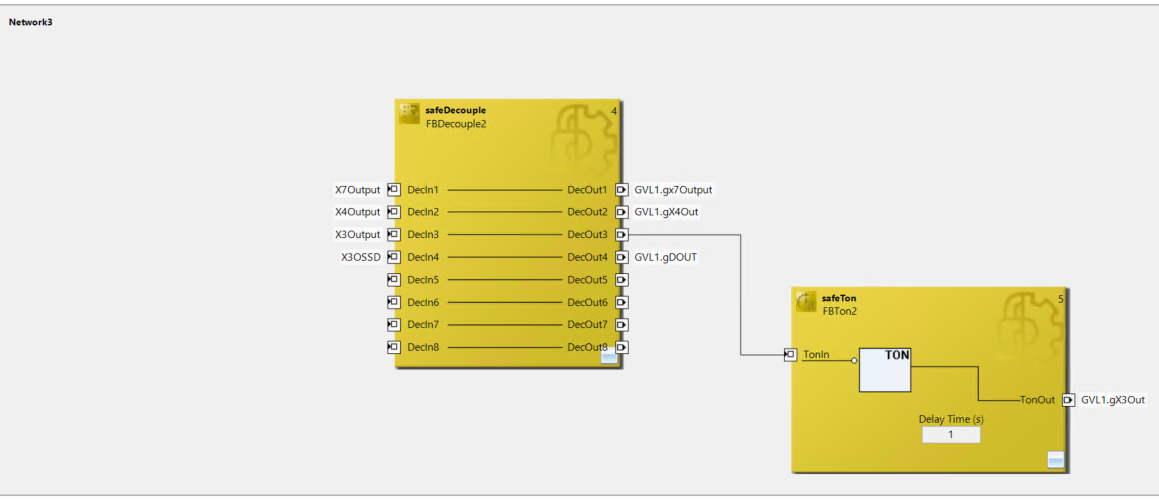
Network3
最後はもう一回SafeDecoupleを使用し内部変数の結果を安全出力に反映します。
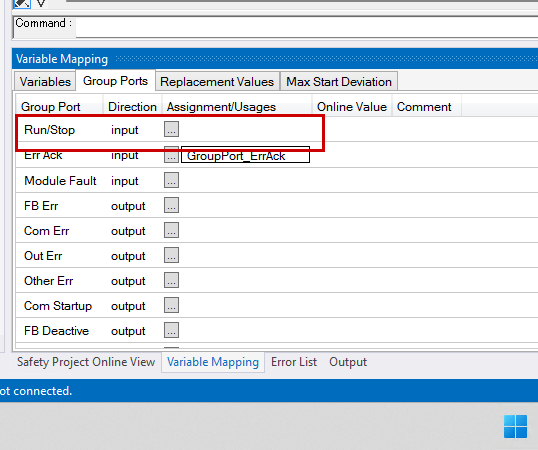
Link Run Variables
Run/Stop VariableをMappingする必要があり、Variable Mapping>Group Ports>Assignmentをクリックします。そのあと先ほど定義したNon-Safety変数gRUNと接続しましょう。
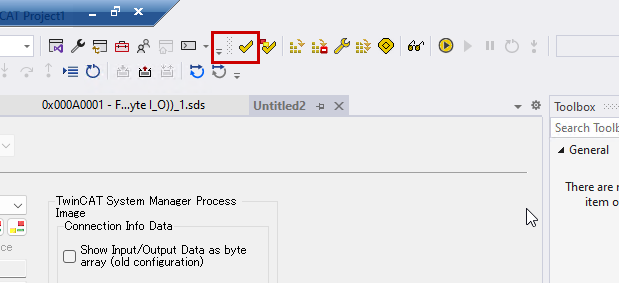
Check Safety Program
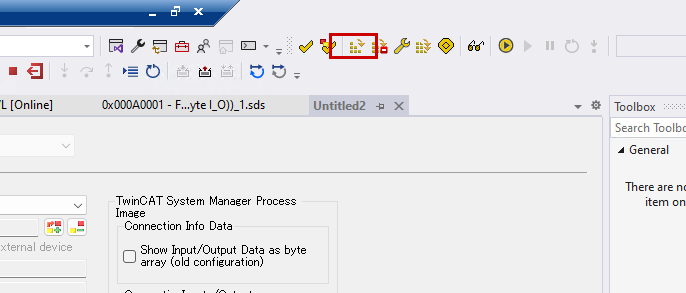
安全プログラム作成が終わったので、赤枠のボタンで安全プロジェクトをコンパイルします。
Download Safety Program
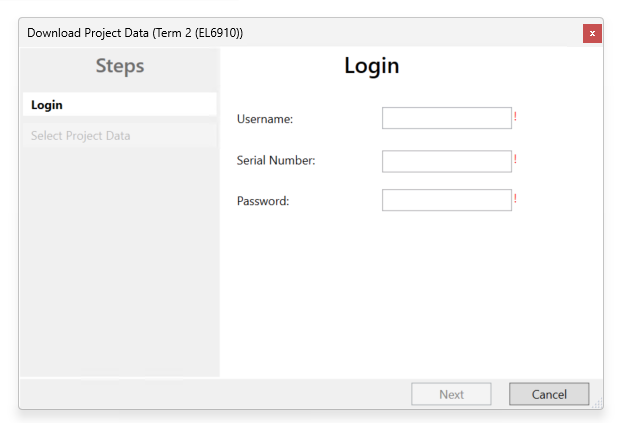
コンパイル完了した安全プログラムをEL6910にDownloadします。
Login情報を入力し、Nextで進みます。
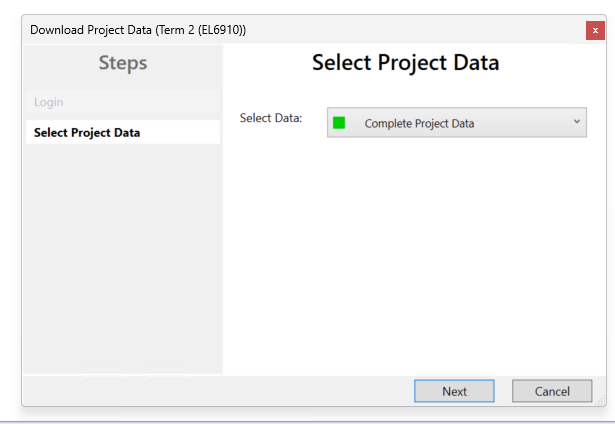
Complete Project Dataを選択し、Nextで進みましょう。
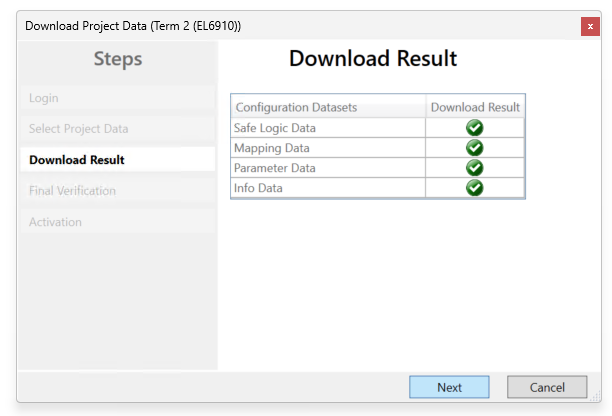
Download結果を確認し、Nextで進みます。
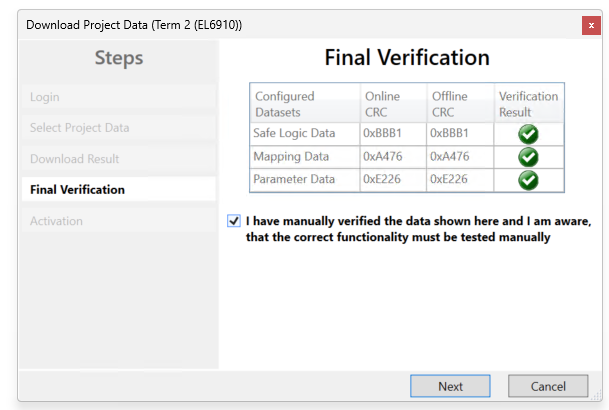
プロジェクトの状態を確認し、Nextで進みます。
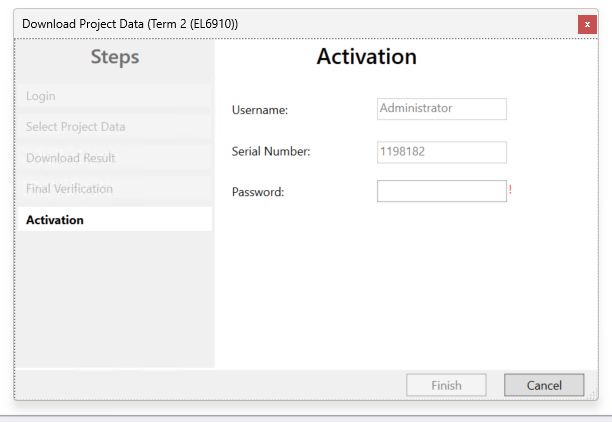
もう一度Passwordを入力し、EL6910を再起動しましょう。
Active Configuration
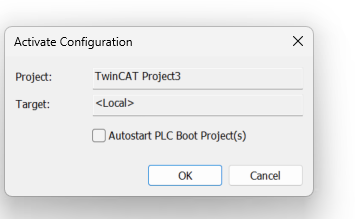
TwinCAT プロジェクトをPLCにDonwloadします。
OKで進みます。
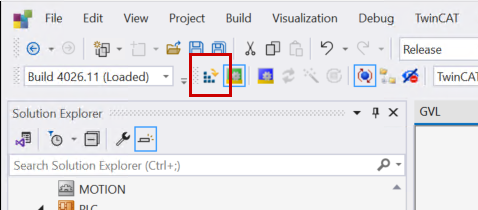
TwinCAT3をRun Modeに切り替えましょう。
Login
LoginでプログラムをDownloadします。
Yesで進みます。
最後はPlayボタンをクリックしPLCプログラムをスタートします。
Result
こちらはEL6910がSchmersal SFB-EC-8M12-IOPと非常停止を連携する動画です。
Beckhoff.EL6910 With Schmersal SFB-EC-8M12-IOP And ESTOP
こちらはEL6910がSchmersal SFB-EC-8M12-IOPとPilz Light Curtanを連携する動画です。
Beckhoff.EL6910 with Schmersal SFB-EC-8M12-IOP And pilz light curtain
こちらはEL6910がSchmersal SFB-EC-8M12-IOPとPilz Door Lockを連携する動画です。
Beckhoff.EL6910 With Schmersal SFB-EC-8M12-IOP And Pilz Door Lock
こちらはEL6910がSchmersal SFB-EC-8M12-IOPとSchmersal AZM40Z-I2-ST-1P2Pドアロックを連携する動画です。