こちらは新しいシリーズでFATEKのM-PLCを使用し様々な記事を展開していきます。第2話M-PLCと同じFatek社のSC3 サーボモータと接続し、Test Runを操作します。
さ、FAを楽しもう。

Reference Link
http://soup01.com/ja/category/fatek/m-series/
http://soup01.com/ja/category/fatek/sc-series/
前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
技術は独り占めせず、届けるもの
私たちは工場の生産技術や制御に関する技術情報を、ブログや動画などで無料公開しています。「知識は誰でもアクセスできるべき」という信念のもと、現場で役立つ具体的なノウハウやトラブル事例などを発信してきました。すべて無料で続けているのは、「知らなかったせいで困る人」を少しでも減らしたいからです。
また、もしあなたの現場で…
- 「このPLCとデバイスの組み合わせ、ちゃんと動くのかな?」
- 「EtherCAT通信でうまくいかない部分を検証してほしい」
- 「新しいリモートI/Oを試したいけど社内に検証環境がない」
など、困っている構成や試してみたいアイデアがあれば、ぜひお知らせください。機器の貸出や構成の共有が可能であれば、検証し、記事や動画で発信します(ご希望に応じて匿名対応も可能です)。
支援のかたち
現在、私達の活動はほぼ無償で続けており、記事や動画の制作には、時間と検証環境の整備が必要です。この活動を継続的にコンテンツを提供するためには、皆様の温かいご支援が大変重要です。
メンバーシップ(ラジオの応援)
Fullさんとのラジオをより充実させるための支援プランです。
https://note.com/fulhause/membership/join
Amazonギフトリスト
コンテンツ制作に必要な機材・書籍をリストにしています。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon(ブログ・動画活動への応援)
月額での小さなご支援が、記事の執筆・検証環境の充実につながります。
https://www.patreon.com/user?u=84249391
Paypal
小さな支援が大きな力になります。
https://paypal.me/soup01threes?country.x=JP&locale.x=ja_JP
知ってたら助かること、届けたいだけです
あなたの応援が、知識の共有をもっと自由で持続可能なものにしてくれます。これからもどうぞよろしくお願いします。
soup01threes*gmail.com
技術はひとりじゃもったいない。
TestRun?
TestRunはUperLogic専用に設計されたモーション制御機能であり、内蔵機能に属します。M-PLCコントローラでモーション制御を実行するには、以下の3つの方法があります:
- ラダー制御
- モーションフロー
- TestRun
試運転するときは、テストラン機能は最も迅速で便利かつ簡単な方法です。PLCラダープログラムやモーションフロー制御プロセスを1行も記述することなく、サーボ動作テストを実施できるためです。
Implementation
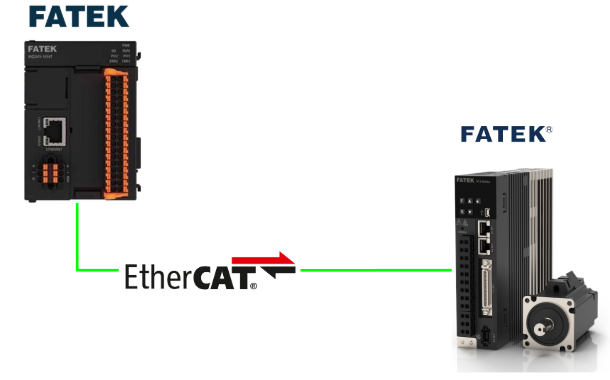
こちらは今回記事の構成で、FATEKのM-PLCとSC3シリーズ ServoとEtherCATで接続します。
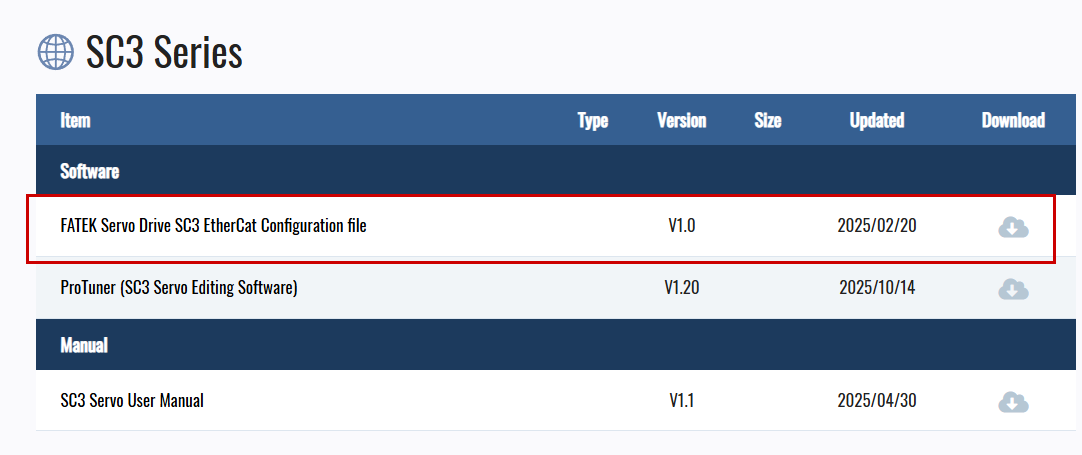
ESIファイルをダウンロード
下記のLinkから今回記事で使用するFATEK SC3 シリーズのServoのESI FileをDownloadします。
https://www.fatek.com/en/download.php?act=list&cid=175
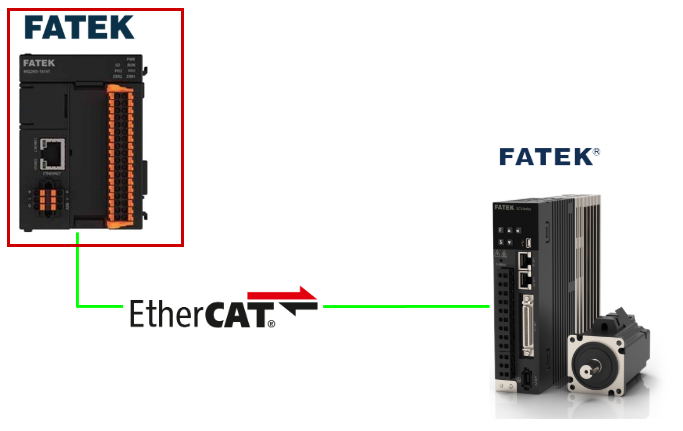
M-PLC Side
FATEKのM-PLC側を構築します。
Configure EtherCAT Network
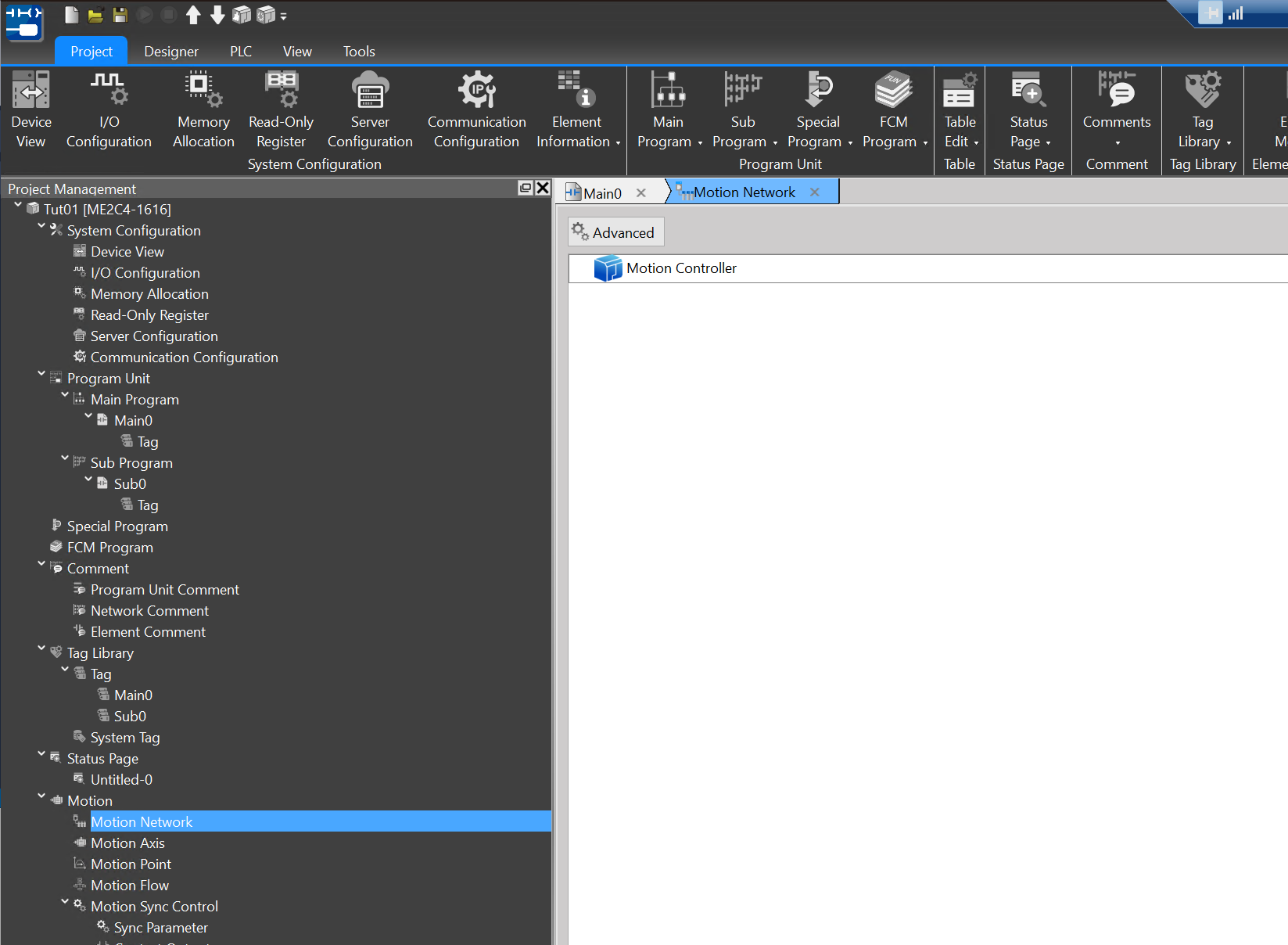
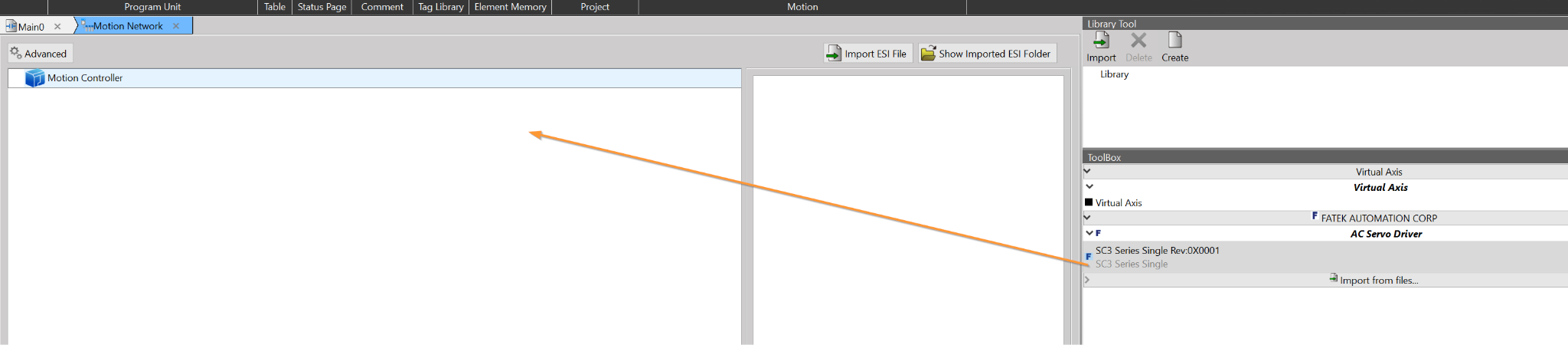
プロジェクトにEtherCAT Slaveを追加するため、Motion→Motion Networkをクリックします。
こちらはUperLogicのEtherCATネットワーク構築画面です。
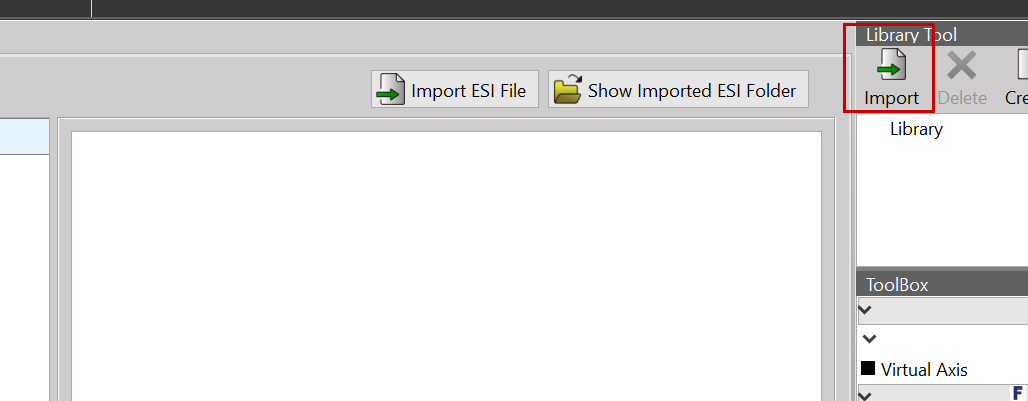
ESIファイルをインポート
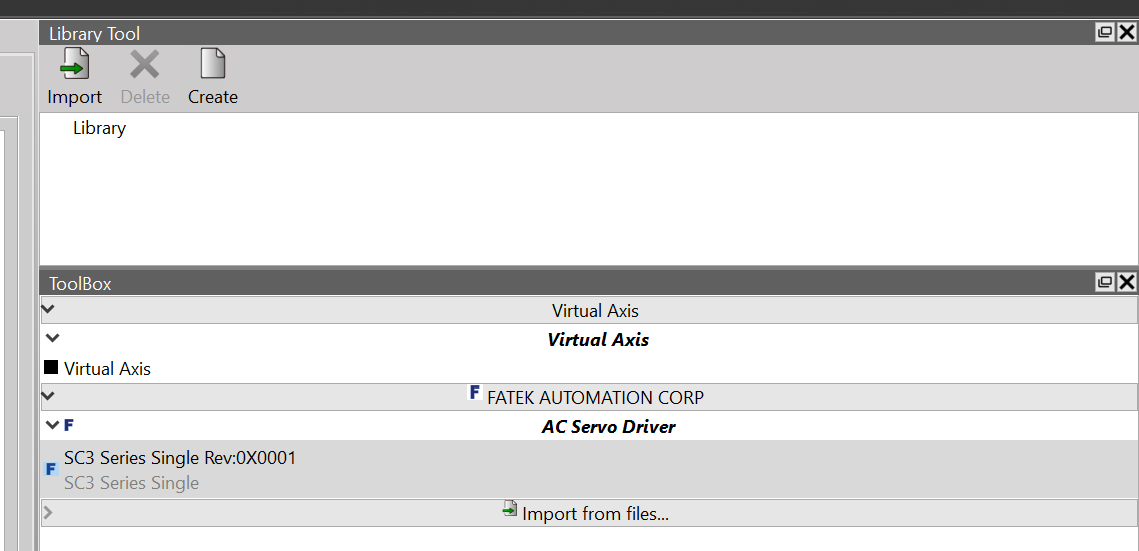
UperLogicの右側にあるLibrary Tool→Importします。
先程DownloadしたESI Fileをクリックします。
Done!ESI FileがImportできました。
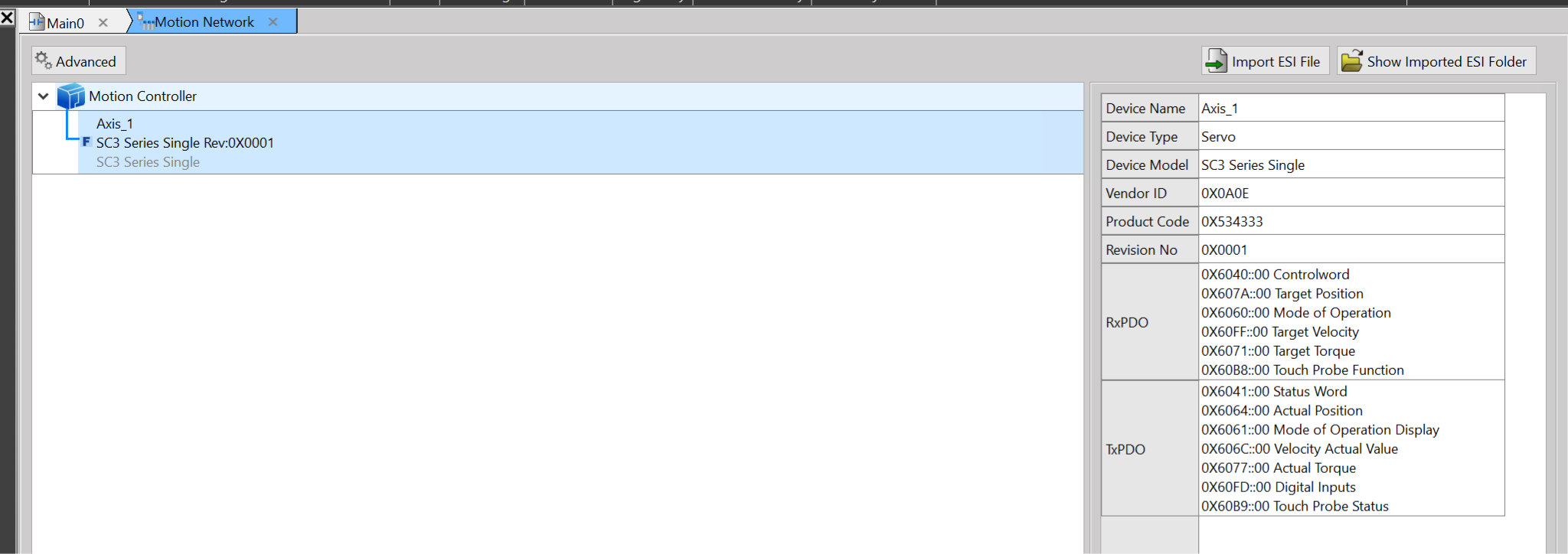
それでFATEKのSC3 シリーズSERVOがImportされました。
SC3サーボを追加
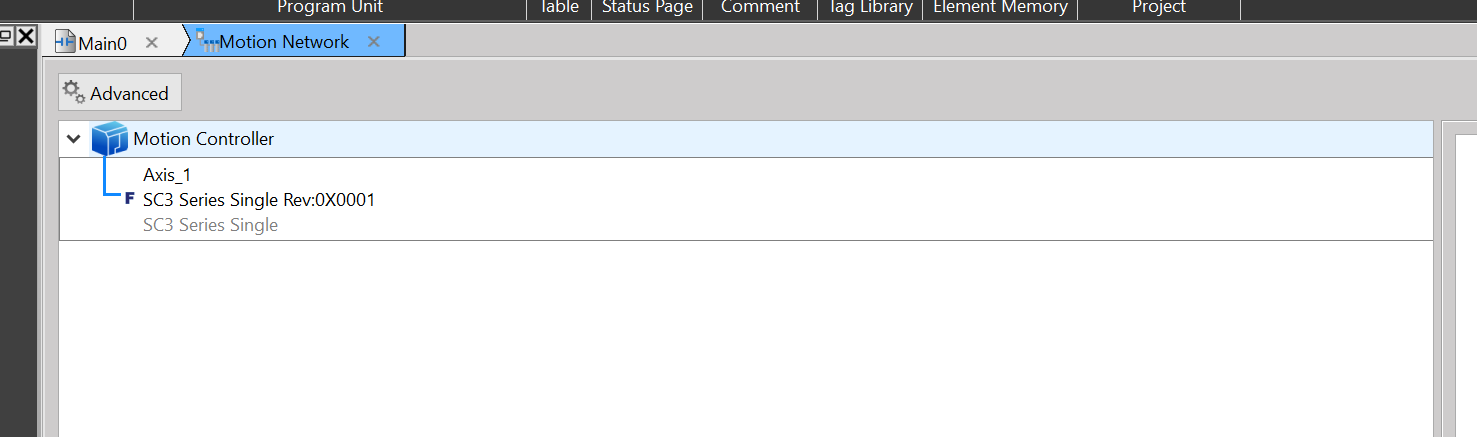
SC3サーボをMotion Controllerに追加します。
Done!
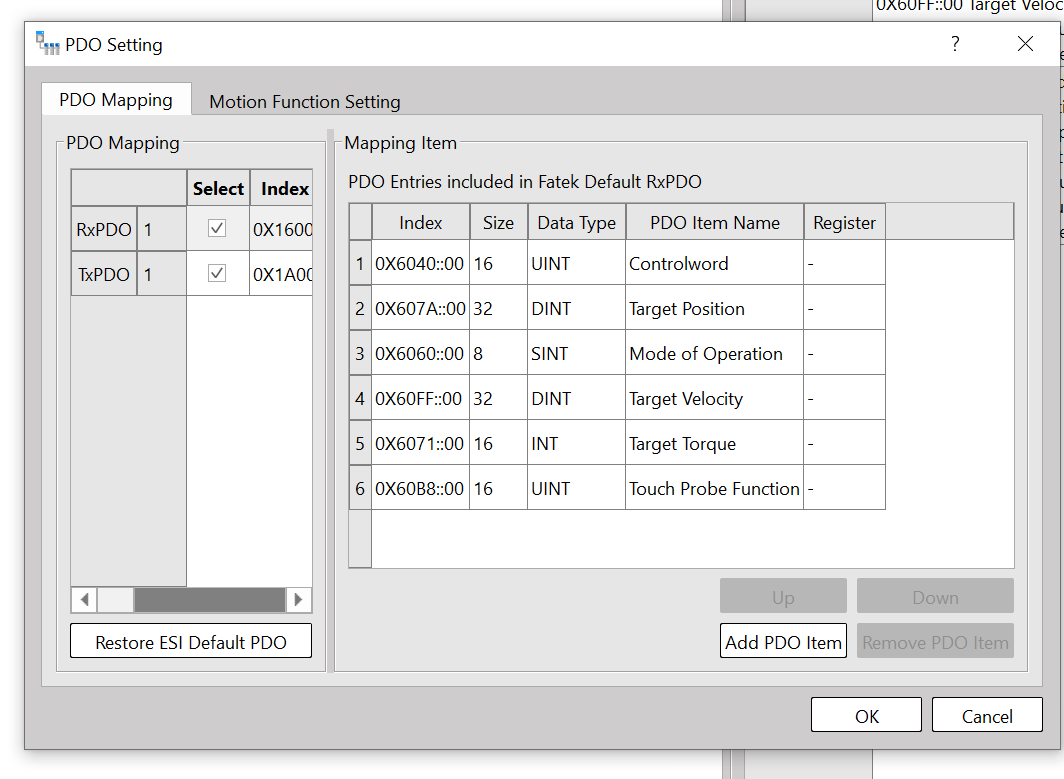
PDO設定
もしEtherCAT SlaveのPDO Mappingを変更したい場合は、該当する軸を選択し→PDO Settingsをクリックします。
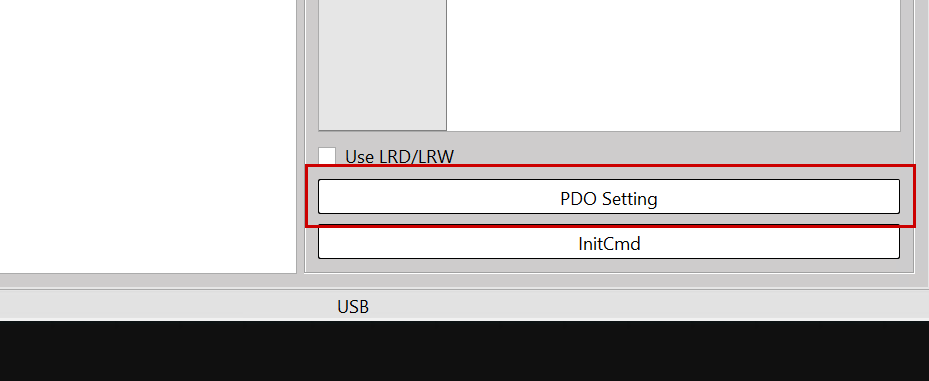
実際のアプリケーションに合わせてPDOを追加しましょう。
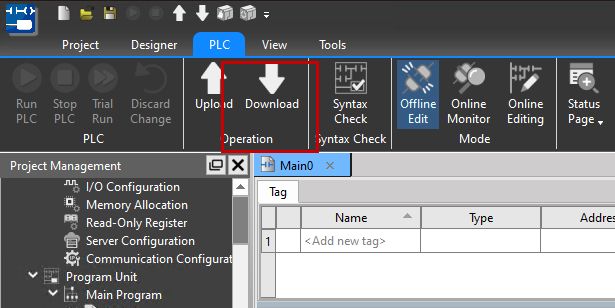
ダウンロード
次はPLC→DownloadでプロジェクトをPLCにDownloadしていきましょう。
PLCと接続するためのパラメータ設定画面が表示されます。
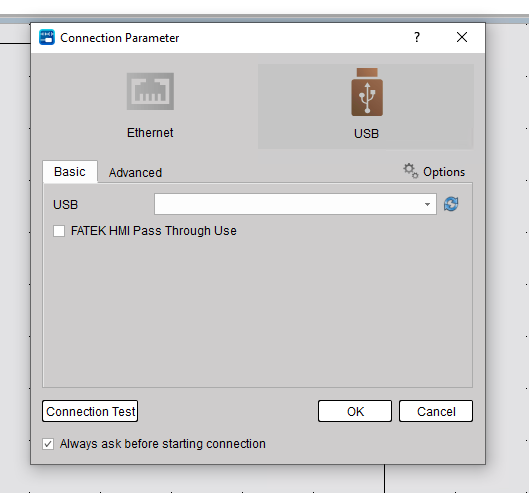
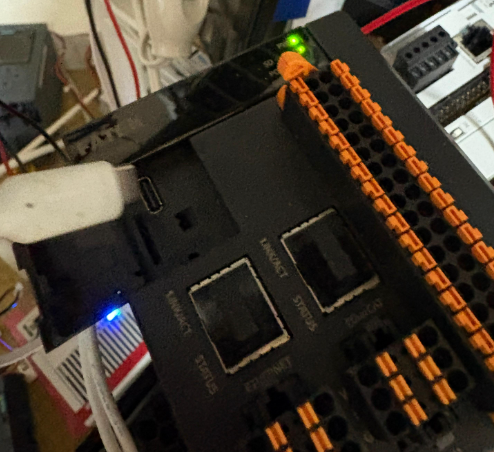
本体にあるUSB-C PortをM-PLCをPCと接続してください。
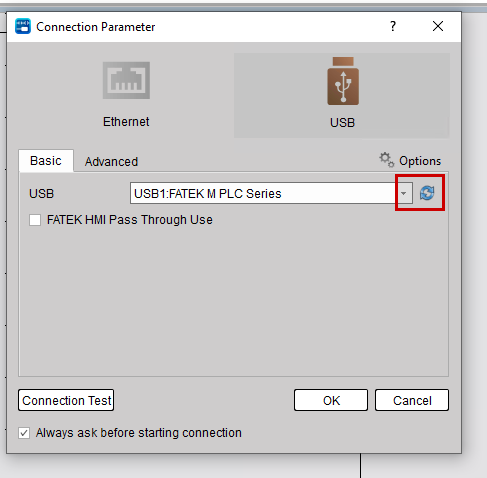
もしUSB Driverが表示されない場合は、下図の赤枠のボタンをクリックして下さい。
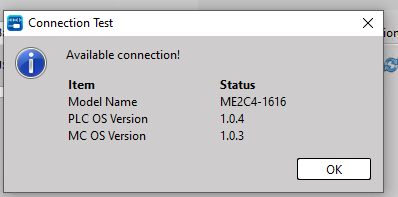
次は左下にあるConnection Testをクリックし、通信テストをしてください。
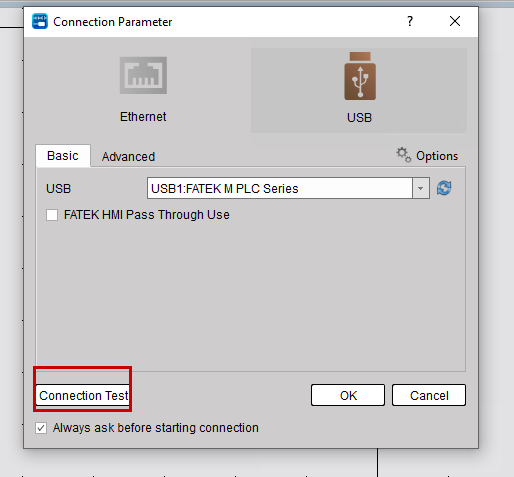
Done!PCとPLCの接続は問題ありません。そしてOkをクリックしプロジェクトをPLCにDownloadしてください。
OfflineとOnlineの異なる場所を確認し、Downloadボタンをクリックしましょう。
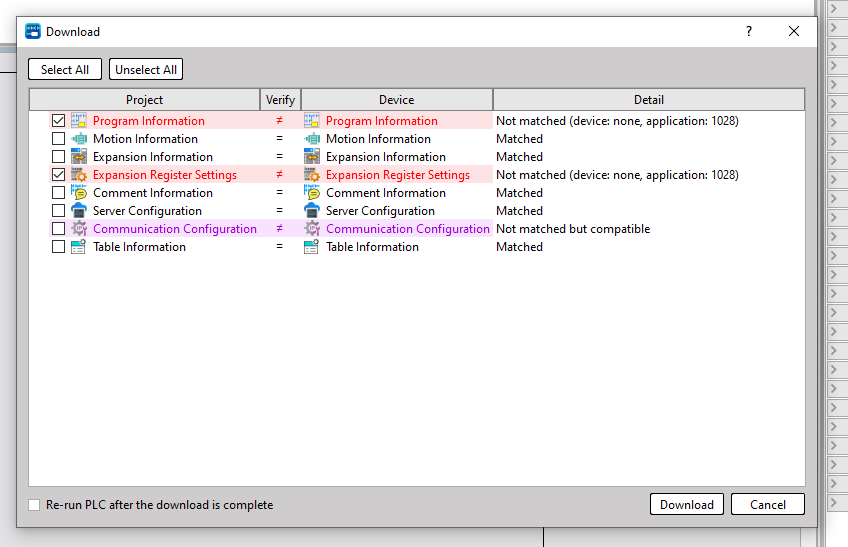
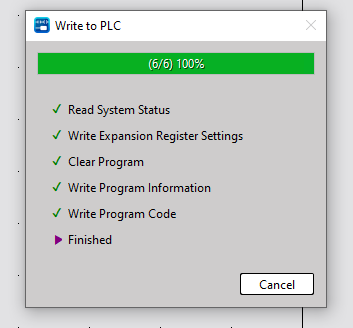
Done!
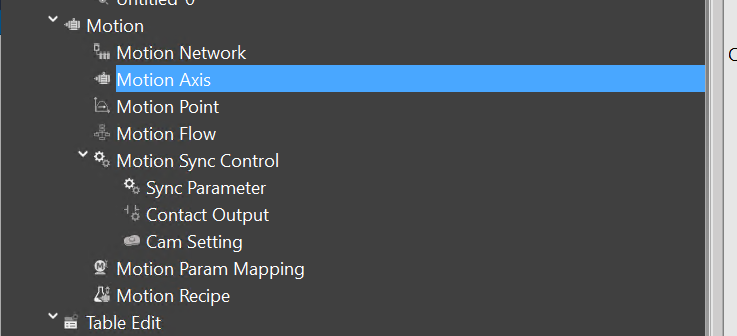
Motion Axis
次は軸の設定を行うために、Motion→Axisをします。
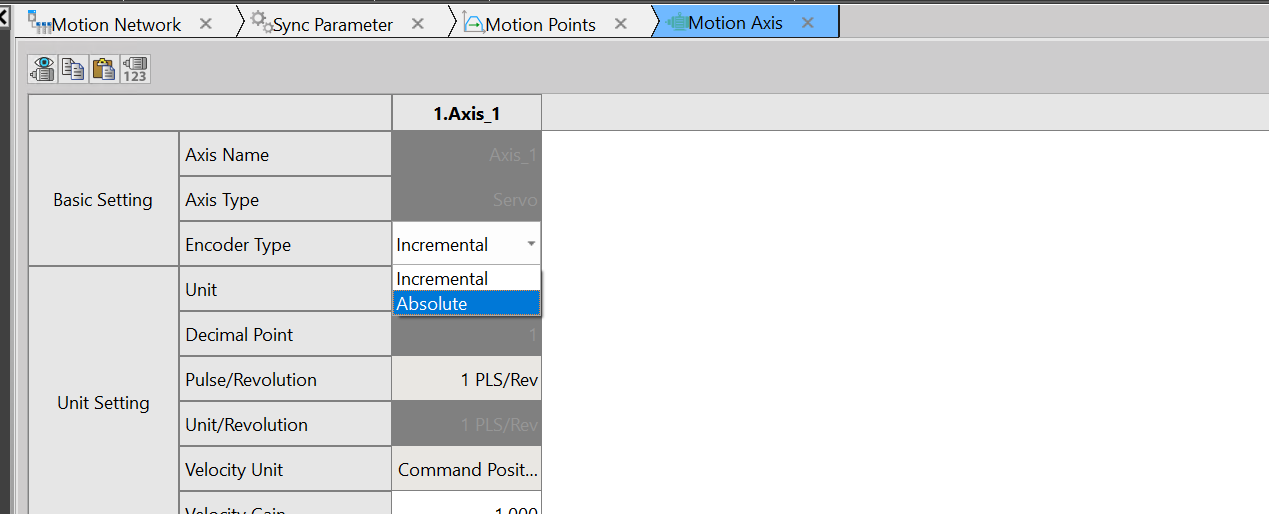
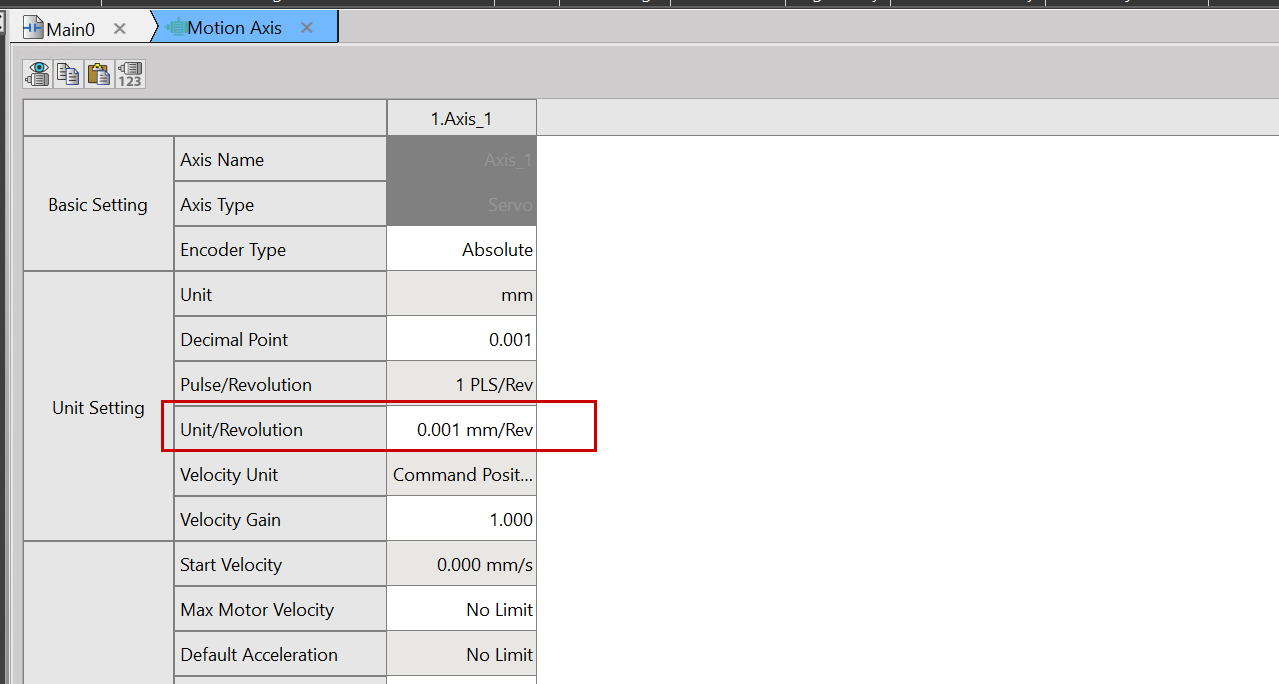
こちらはサーボの設定画面になります。
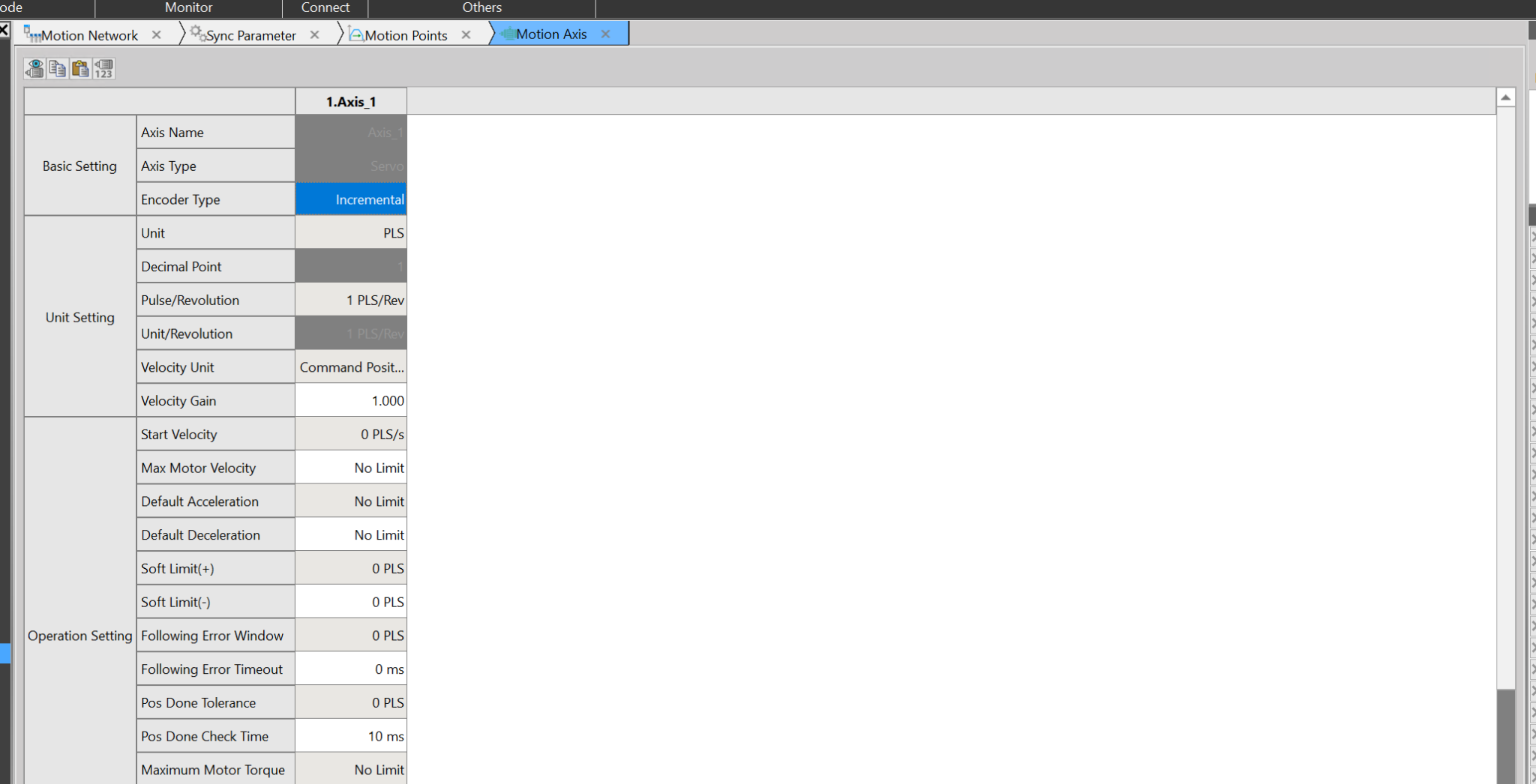
Encoder Typeを採用するServoタイプに合わせて設定します。
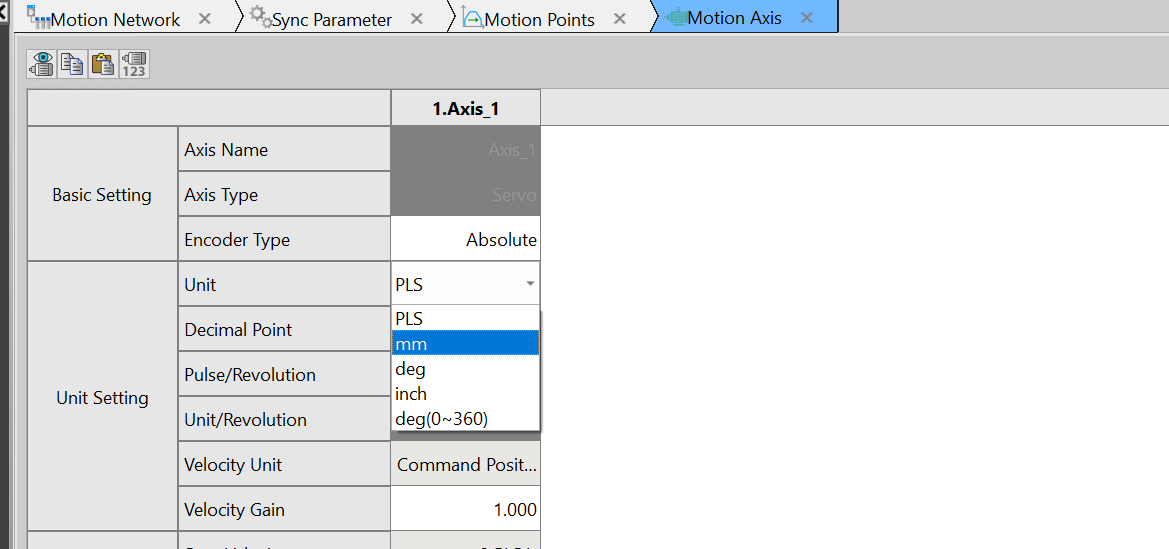
こちらは単位の設定になります。今回はmmに設定します。
Unit Revolutionは1回転するmmを設定します。
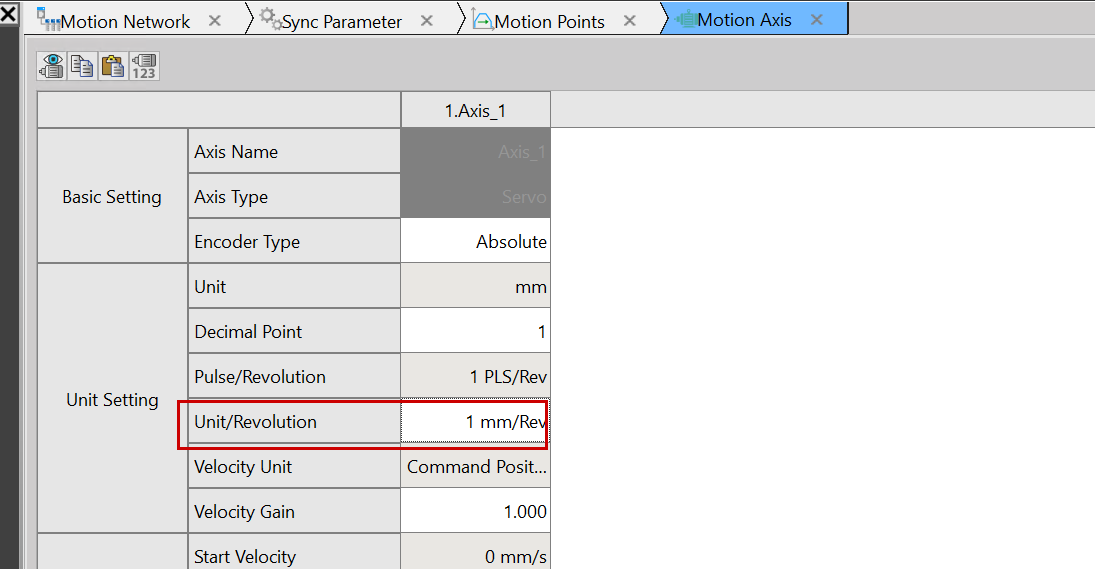
今回は6mm=1回転に設定します。
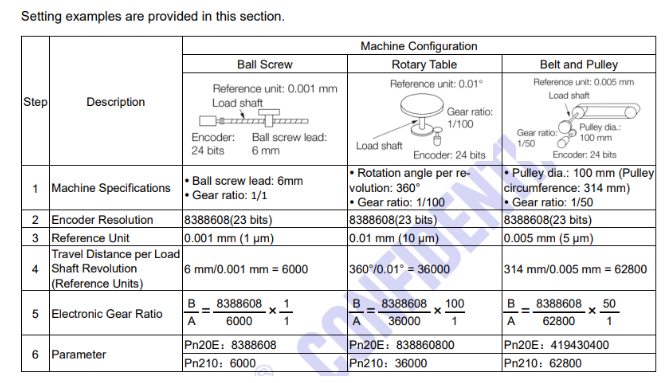
こちらはSC3シリーズの説明です(どっかの日本メーカーの取説と非常似てると思いますが、ここは一旦忘れていきましょう)。こちらはFatekのSC3 Servoモーターの分解能設定の説明で、今回の記事ではBall Screwタイプ、6mm/0.001mで、Reference Unitは0.001に設定します。
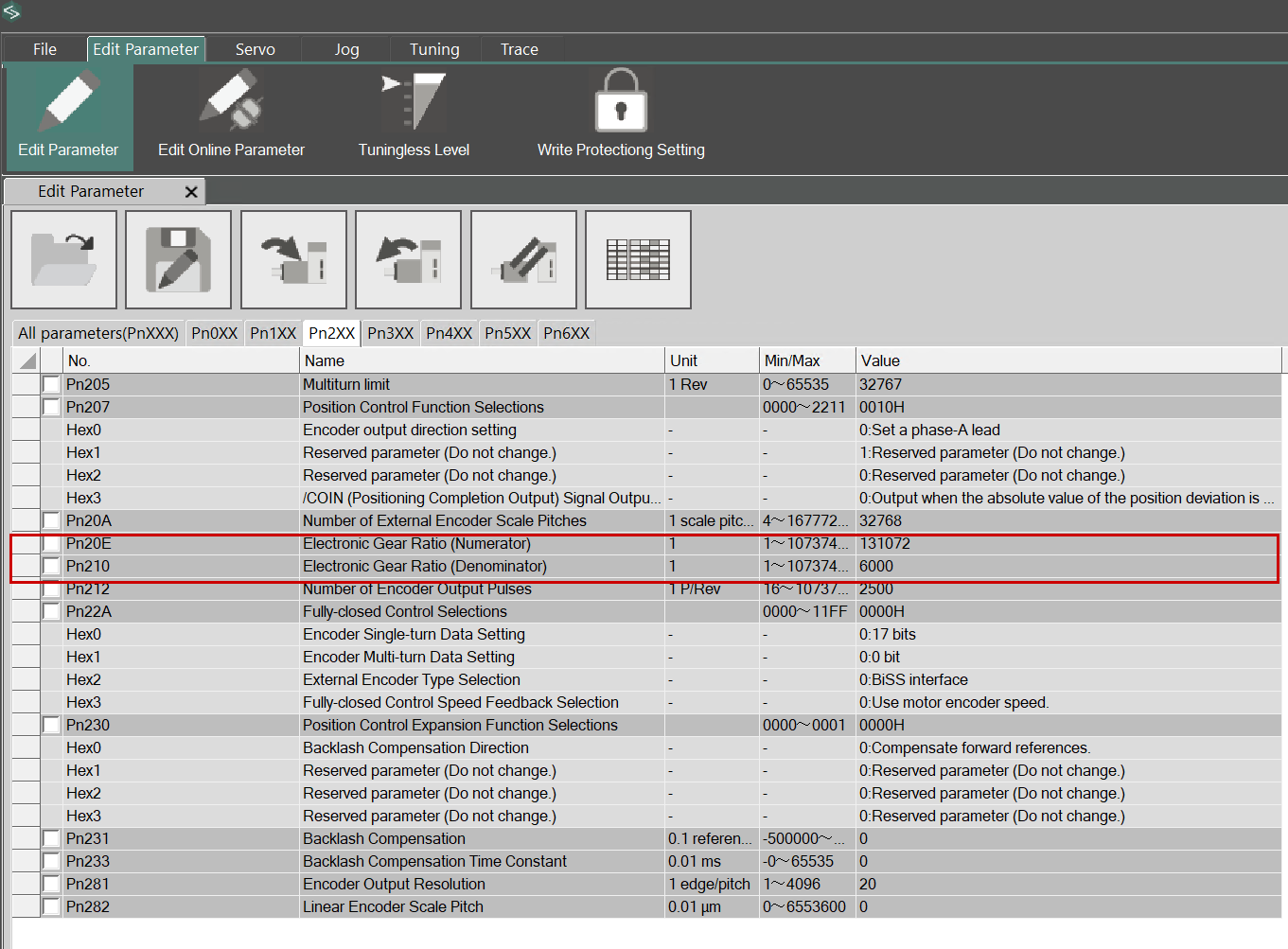
今回はPn20E=131072でPn210を設定します。記事で使用したServoモーターの分解能は17Bitであり、一回転は6000(単位、mm)に設定します。
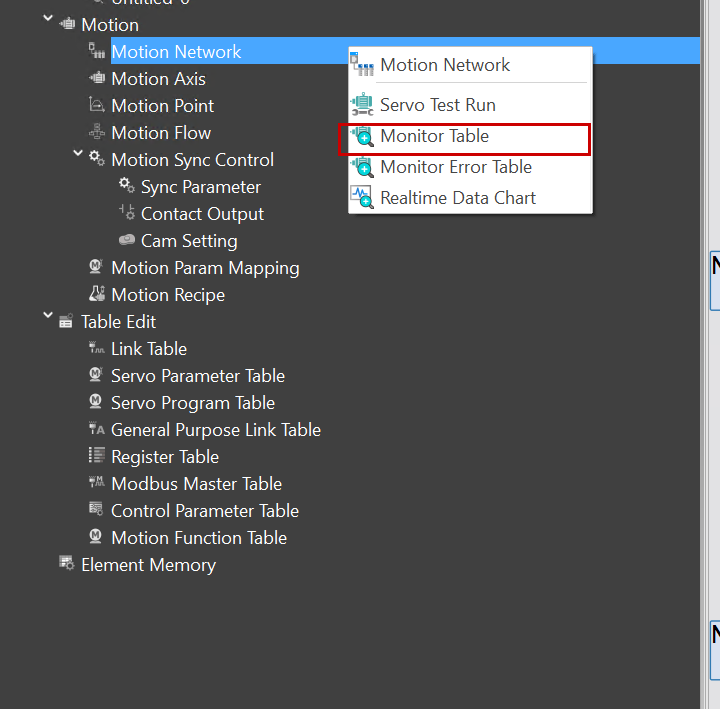
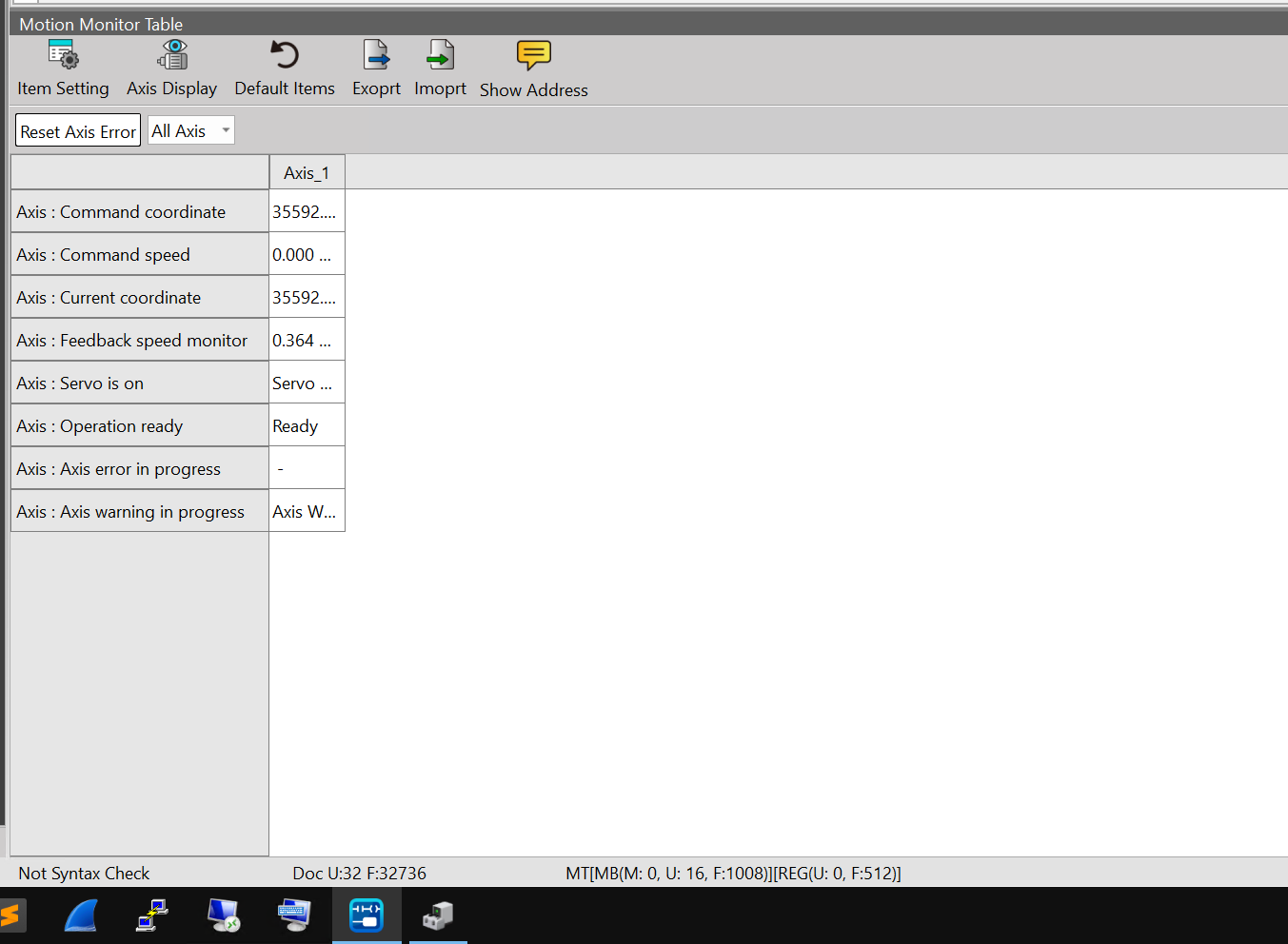
Monitor Table
Motion Tableは各軸の状態を確認できます。Motion→Motion Network→Motion Networkをクリックします。
こちらは現在軸の状態を確認できます。
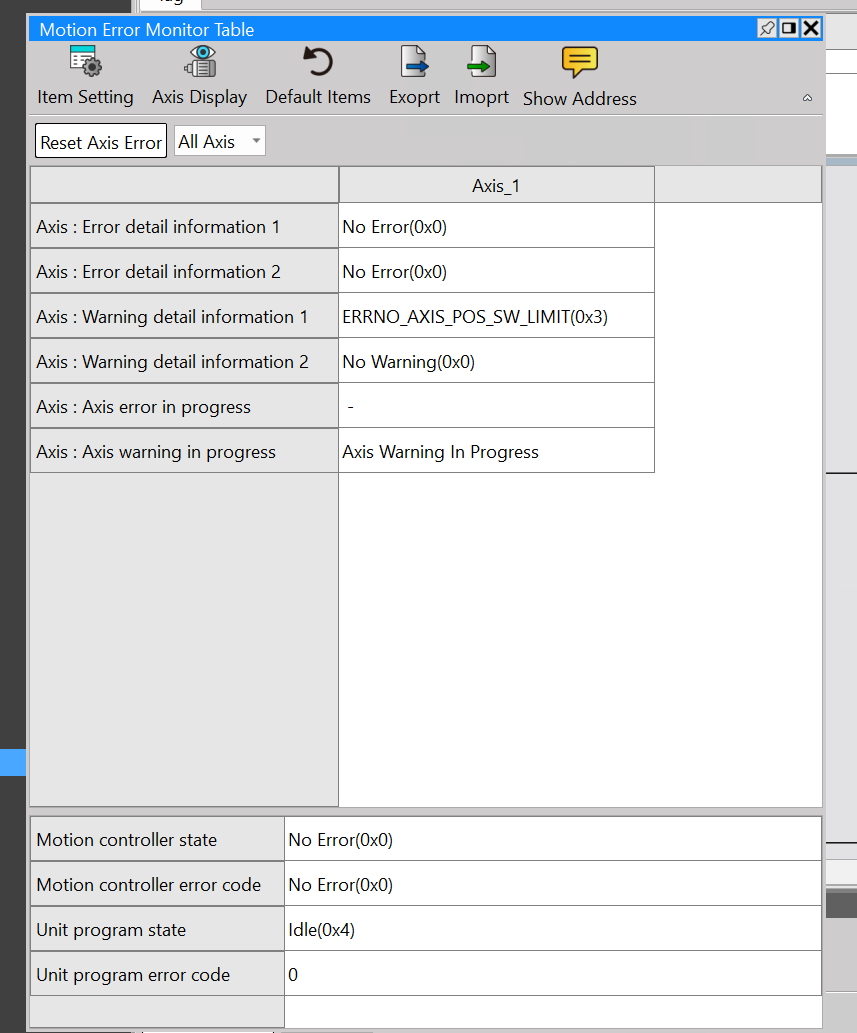
Monitor Error Table
軸のエラー状態を確認したい場合はMotion→Motion Network→Motion Error Tableをクリックします。
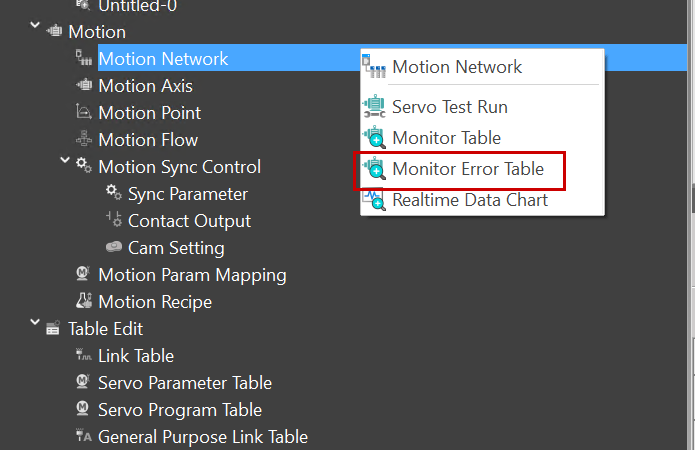
Motion Error Monitor Table は、MPLCが管理している各軸の エラー・警告・進行状態を一覧で可視化する診断画面です。
Real Time Chart
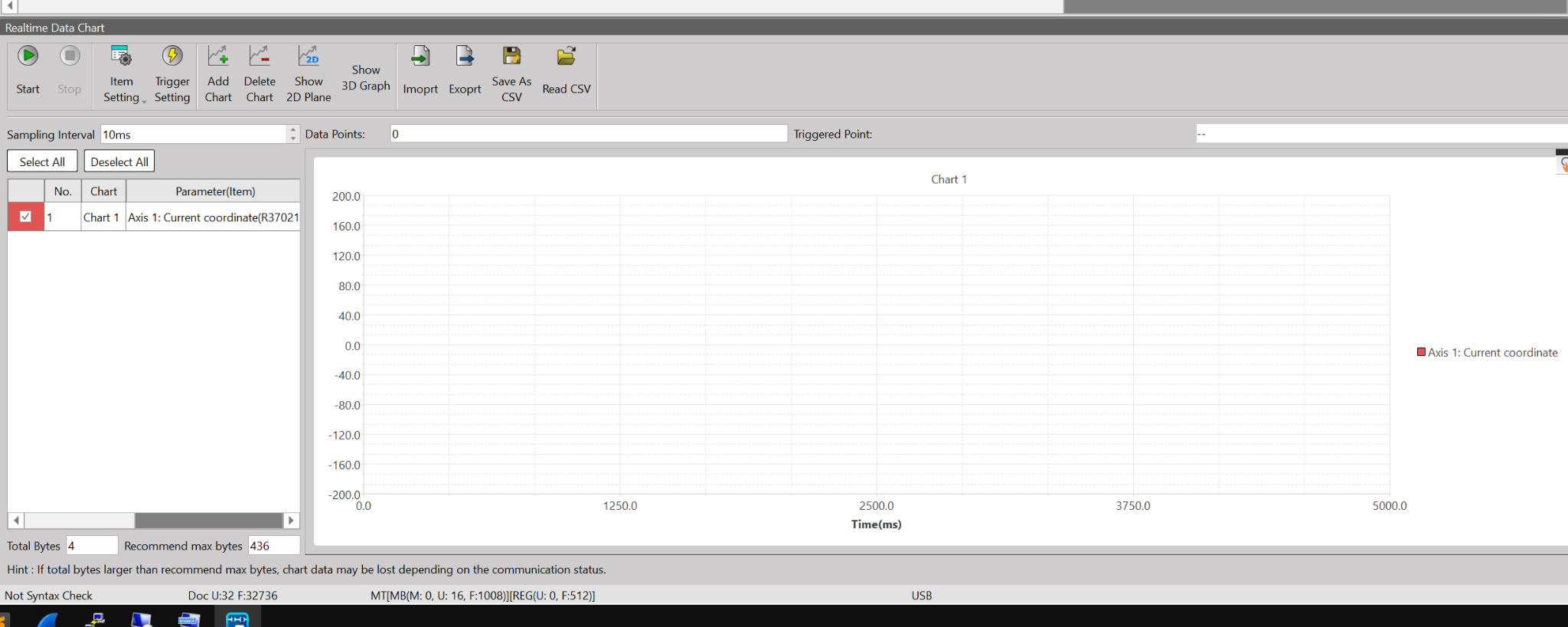
次はMotion→Motion Network→Realtime Data Chartをクリックします。
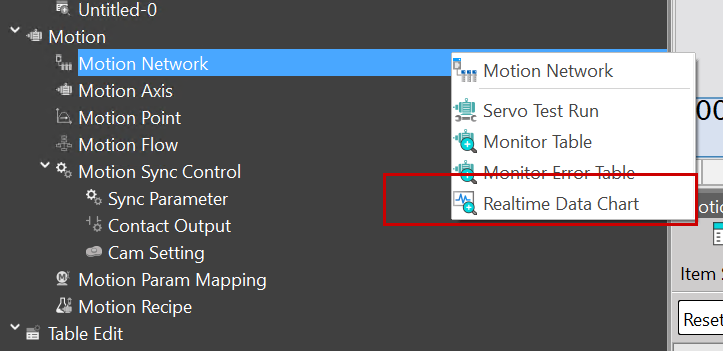
Realtime Data Chart は、モーション軸の内部データを 時間軸でリアルタイム可視化するためのツールです。
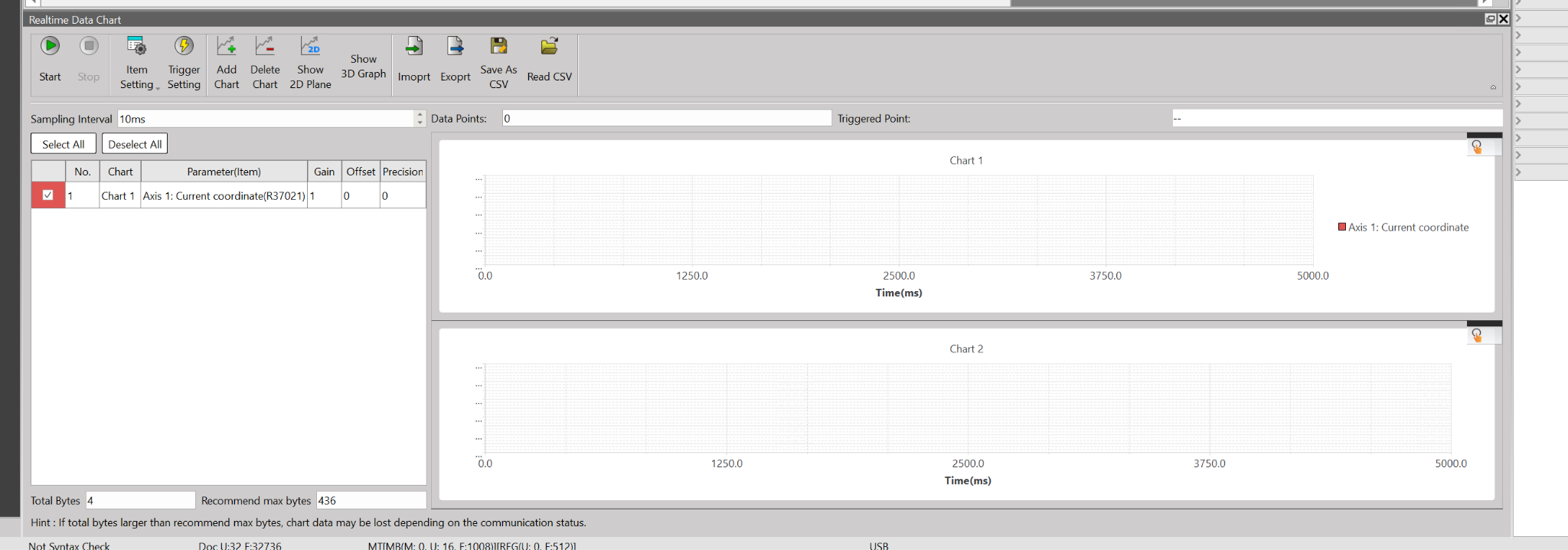
Add Chart
Add Chartをクリックし、複数のRealtime Data Chartを追加できます。
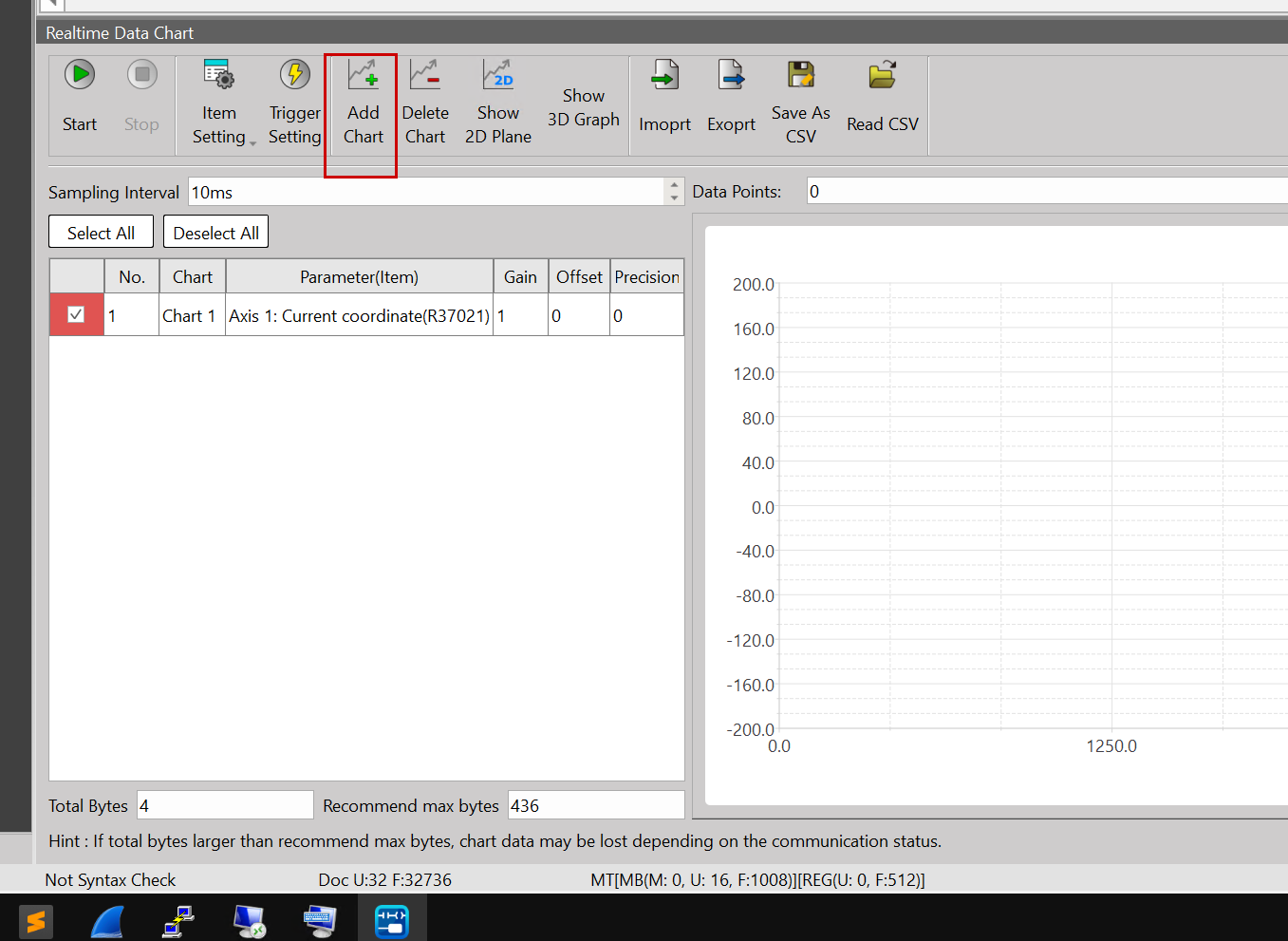
Done!
Item Settings
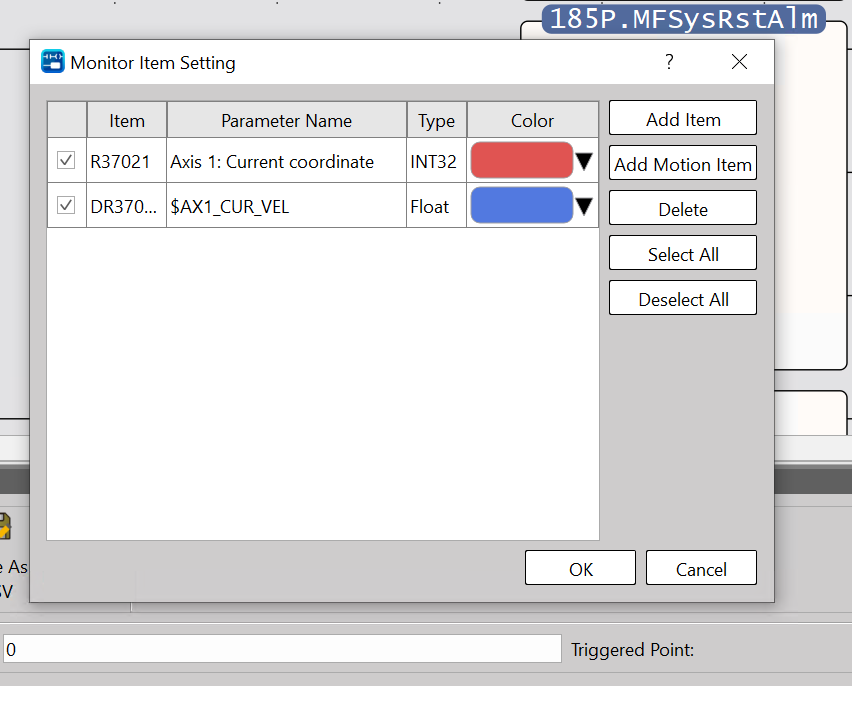
次はItem Settingsで監視するデータを追加できます。
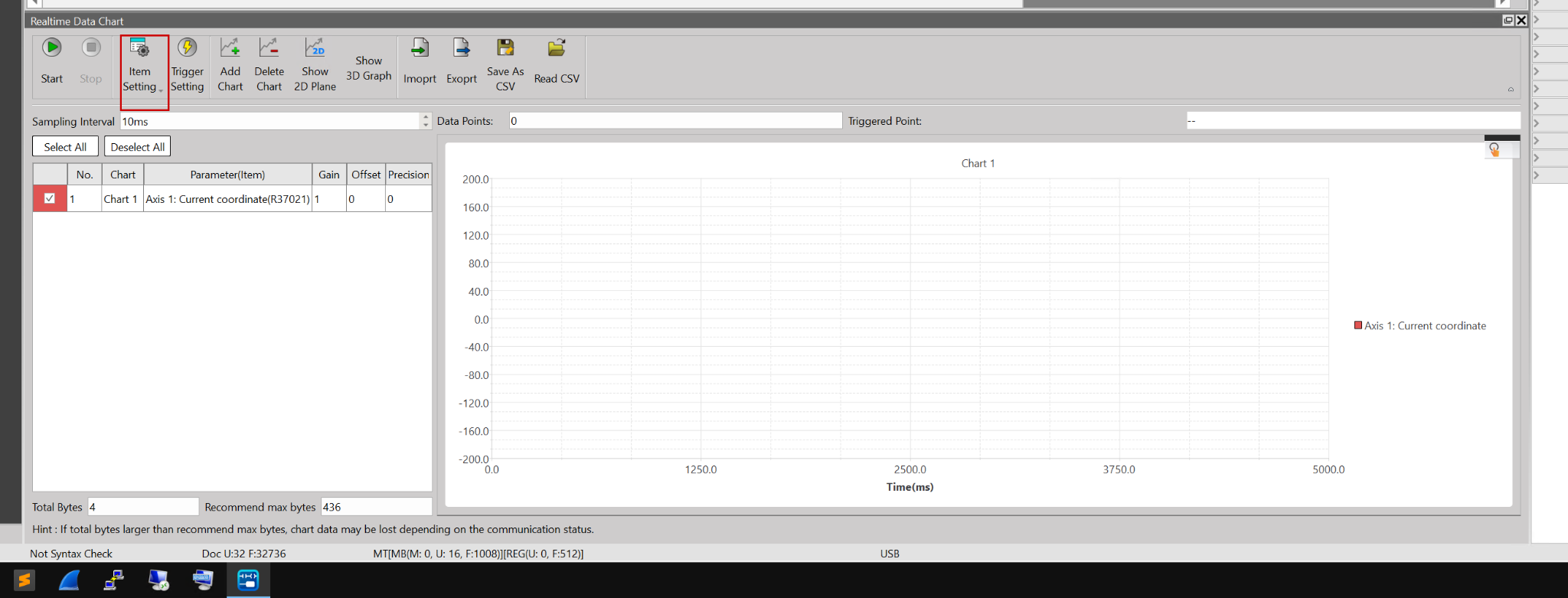
こちら監視するデータの設定画面です。
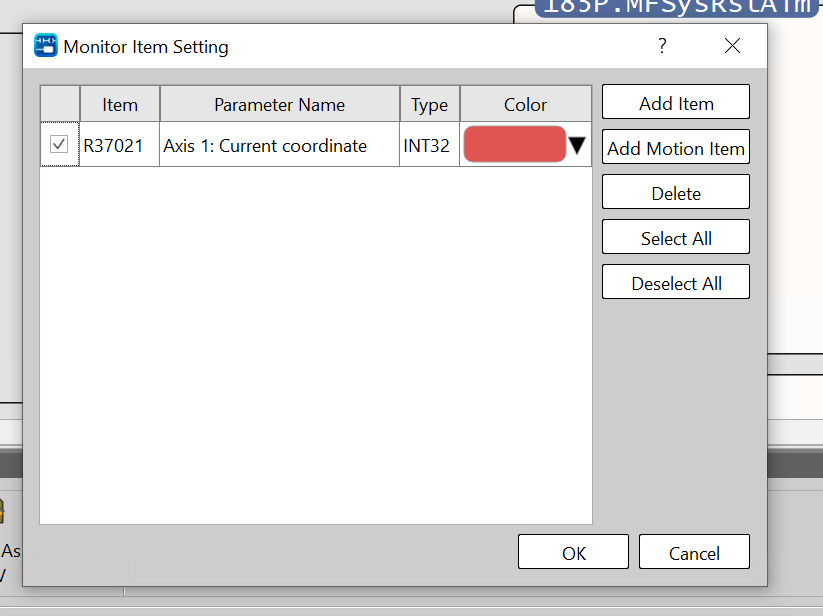
Add Itemで監視項目を追加します。
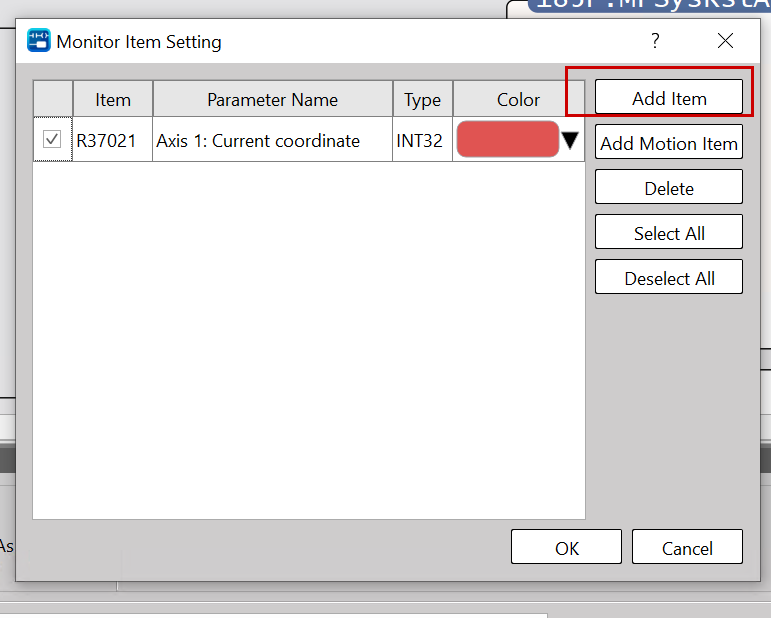
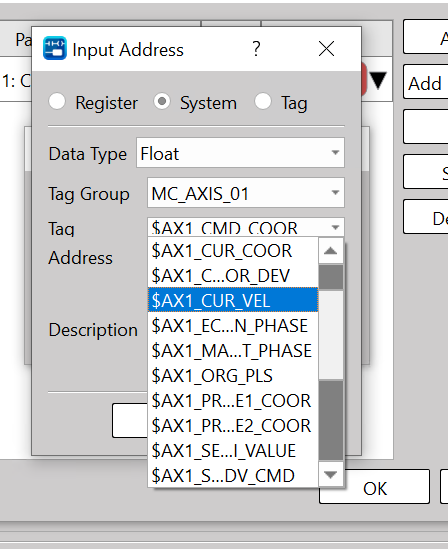
項目の追加設定画面が表示され、Nameの隣にある…ボタンをクリックします。
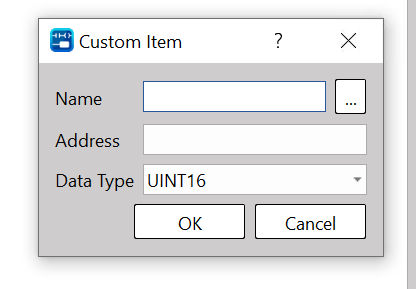
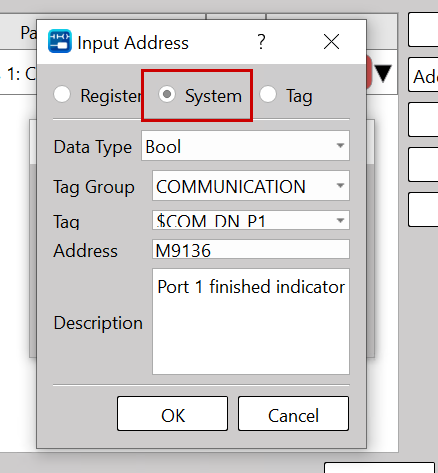
デバイスの設定画面が表示されます。
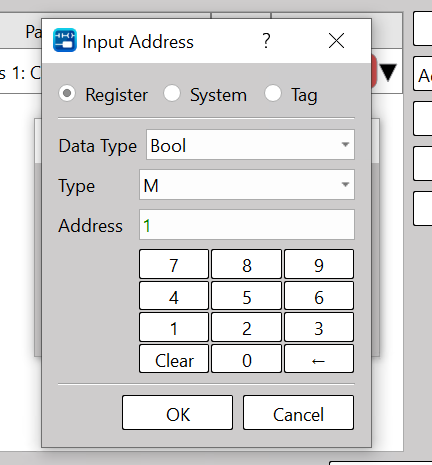
Systemを選択します。
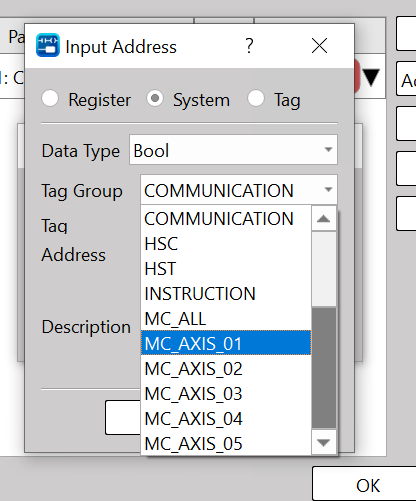
今回は軸1のデータを監視したいので、Group→MC_AXIS_01をクリックします。
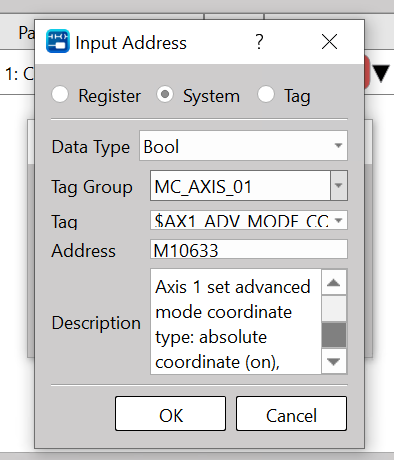
ここで軸1のBoolタイプデータを追加できます。
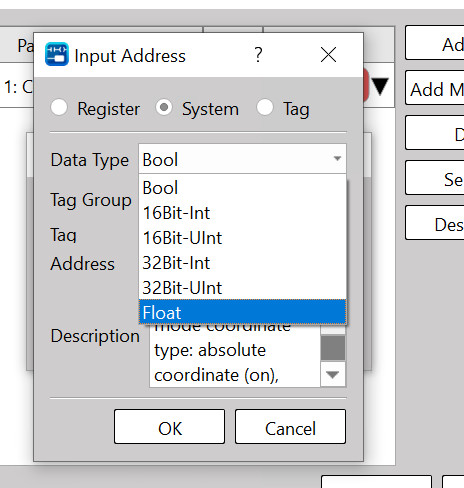
もちろん、Boolだけではなく、Floatタイプなどの軸変数にも監視できます。
今回は軸1の現在速度を監視します。
最後はOKで項目を追加しましょう。
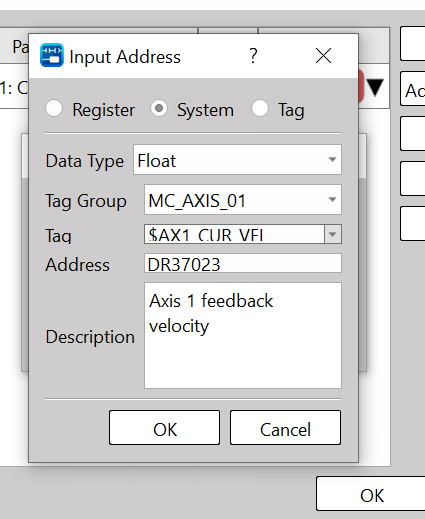
最後はOKをクリックします。
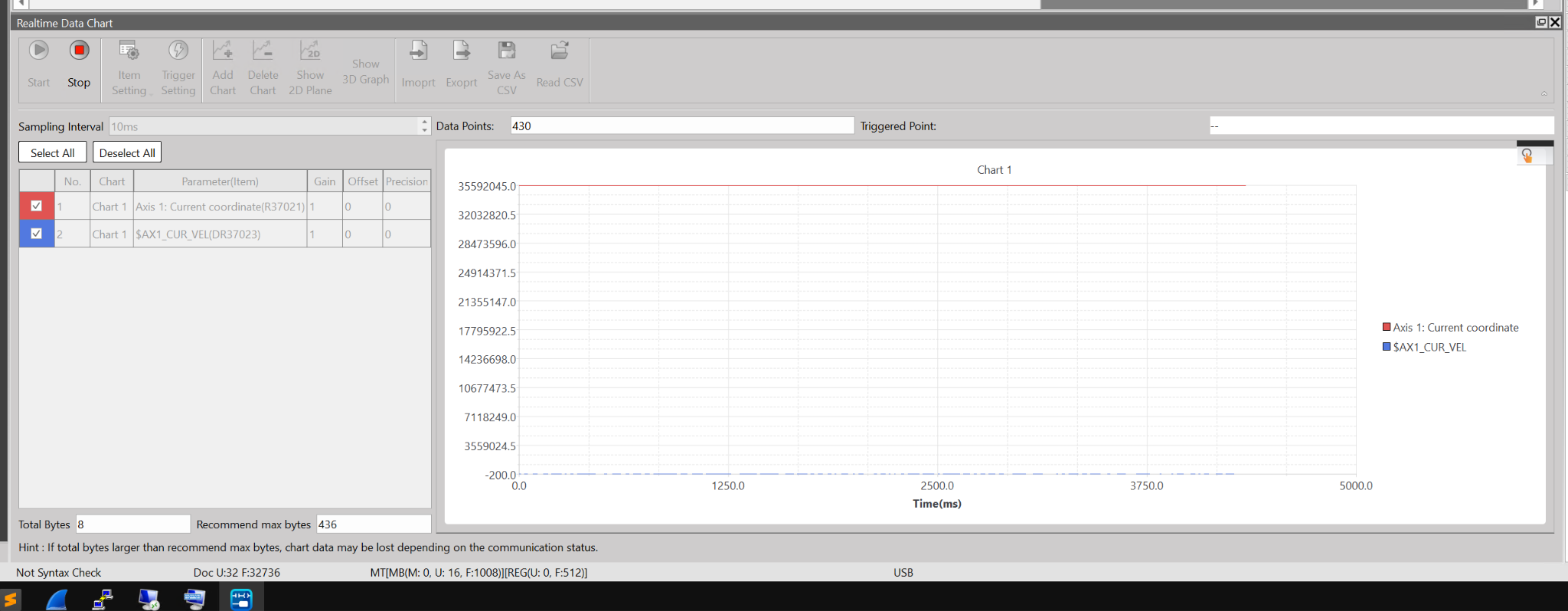
Start to view
次はStartボタンをクリックし軸1の現在位置と速度を監視します。
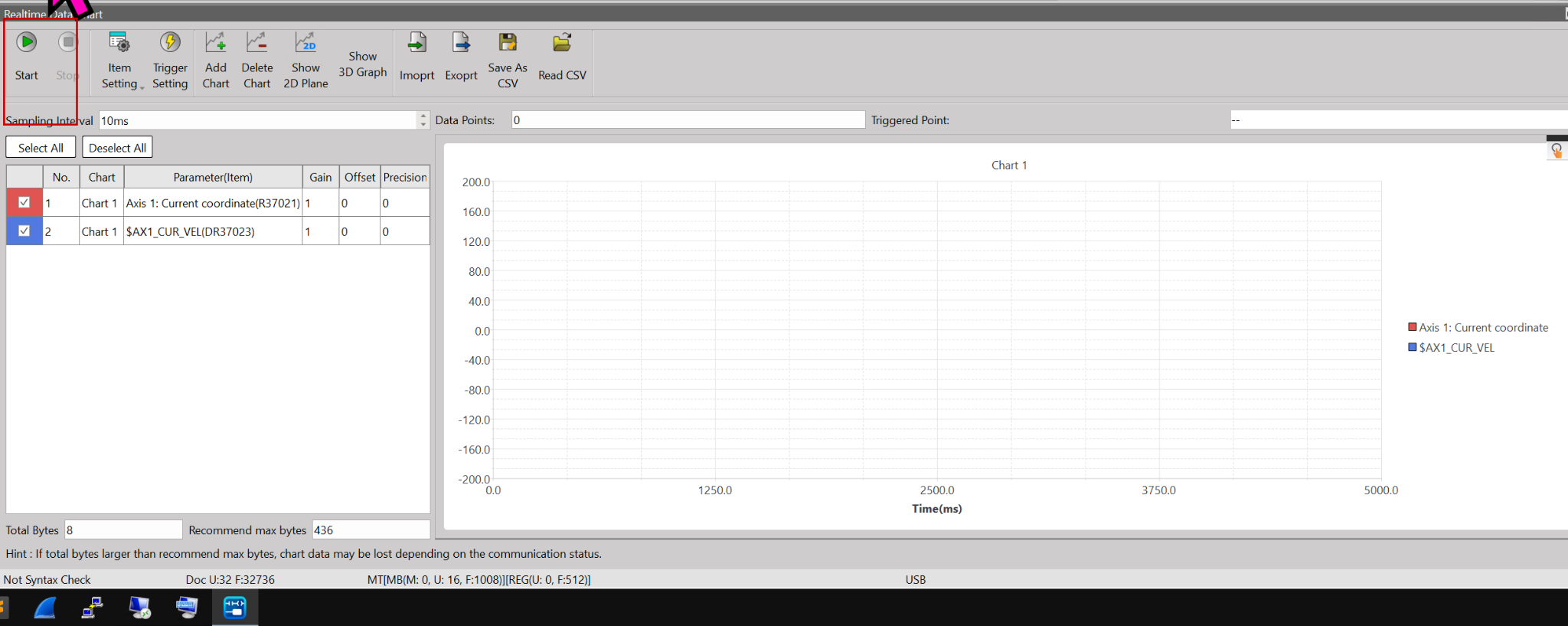
Done!最後はStopボタンをクリックし、データの監視を停止します。
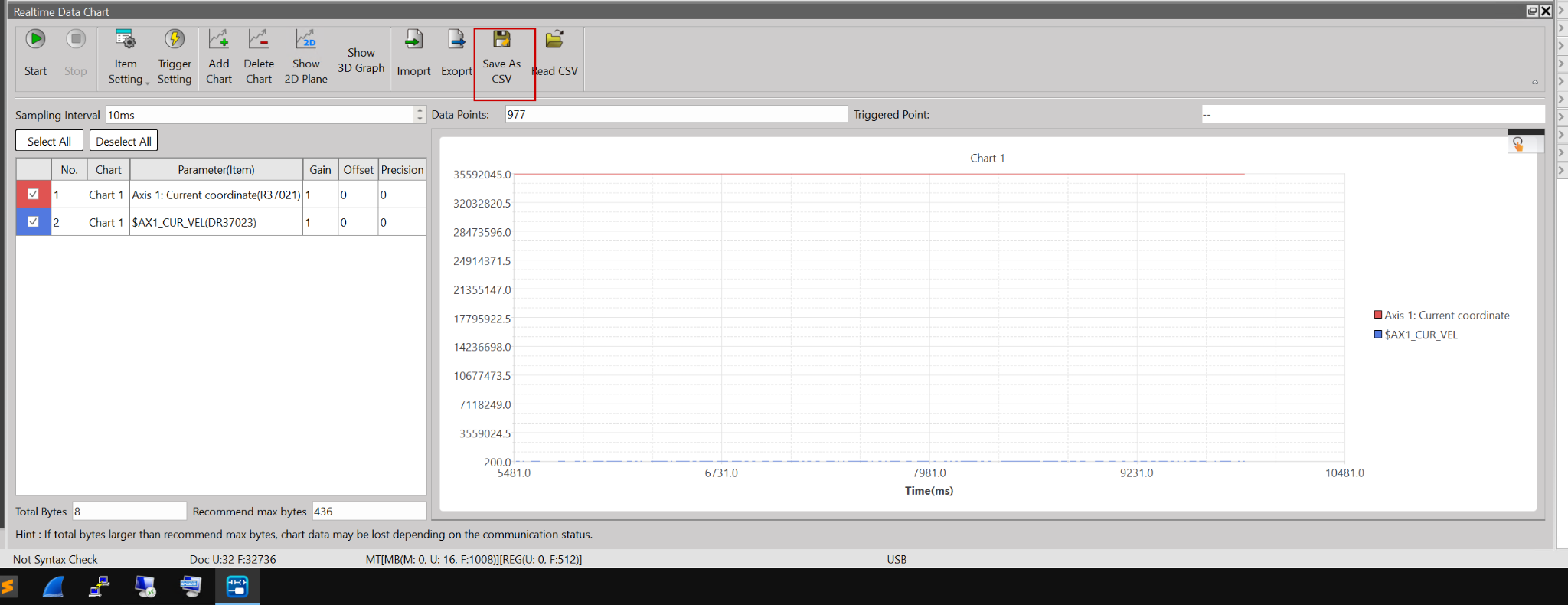
Save as CSV
Save as CSVボタンをクリックし取得したデータをCSV FILEとして保存できます。
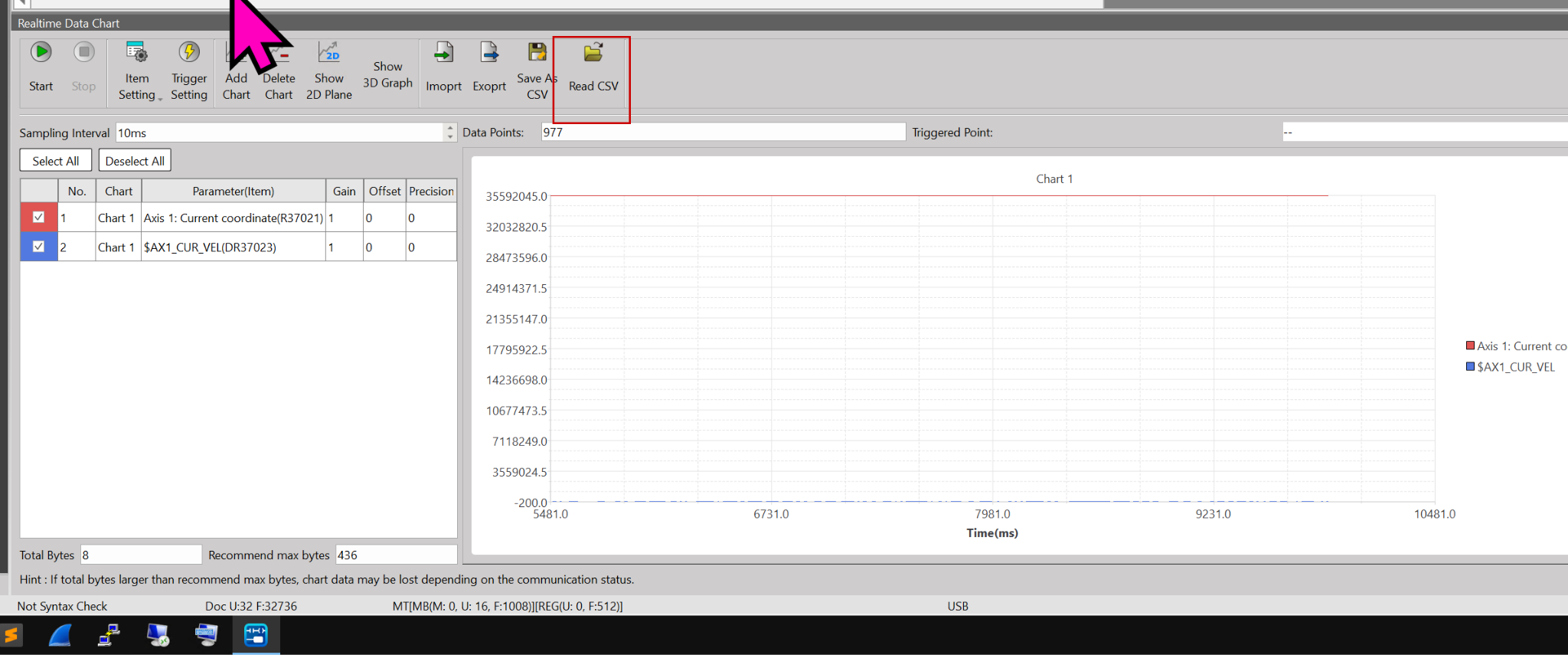
Read CSV
Read as CSVボタンをクリックし取得したデータをCSV FILEにUperLogicをImport、表示できます。
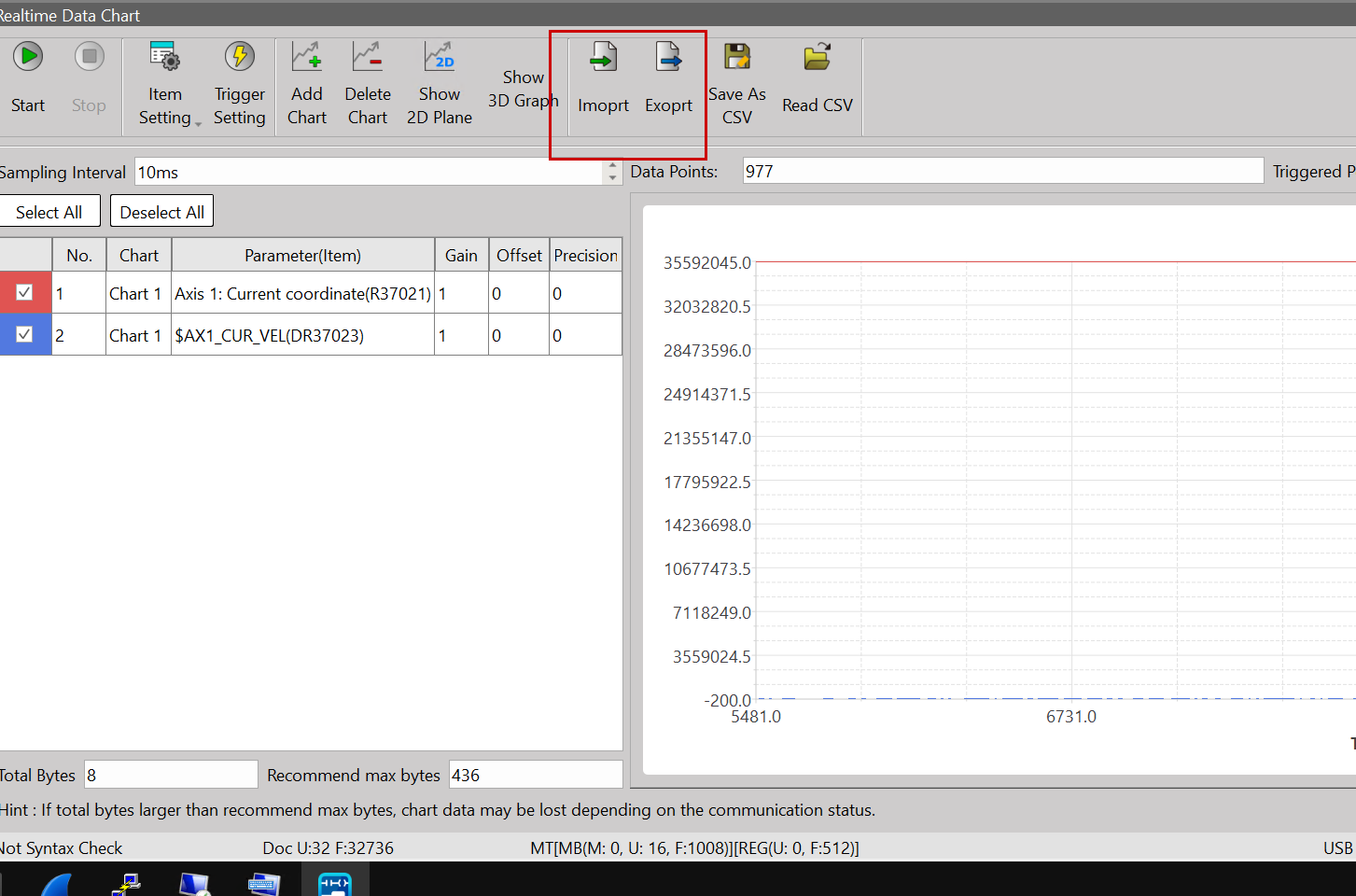
Import/Export Settings
また、Import/Export Settingsをクリックし、このRealtime Data Chartの設定を再利用可能です。
Test Run!
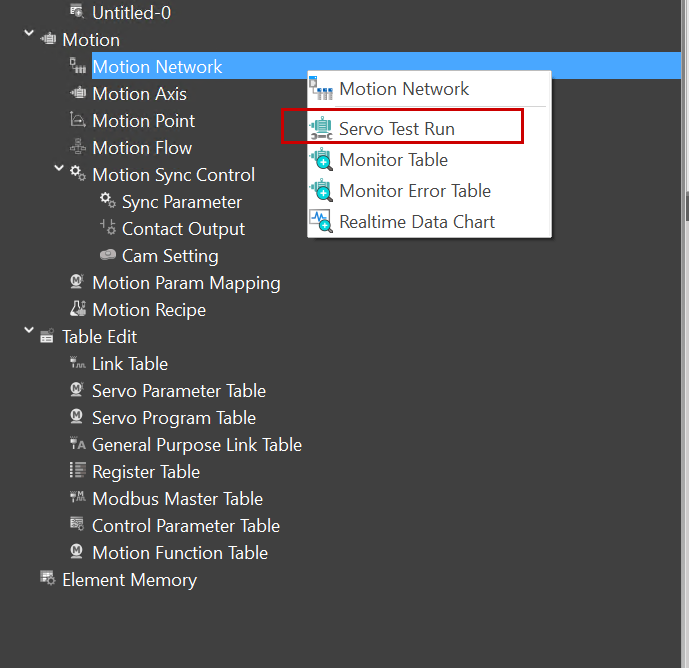
最後はTest Runを実施します。Motion→Motion Network→Servo Test Runをクリックします。
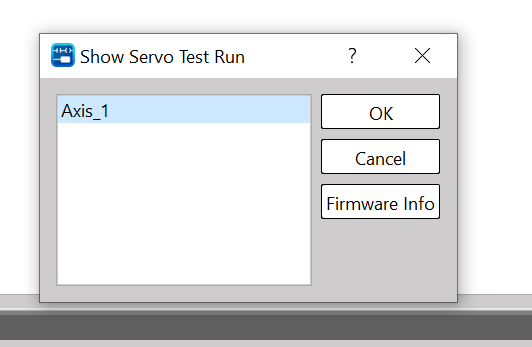
Test Runを操作したい軸を選び→Okで進みます。
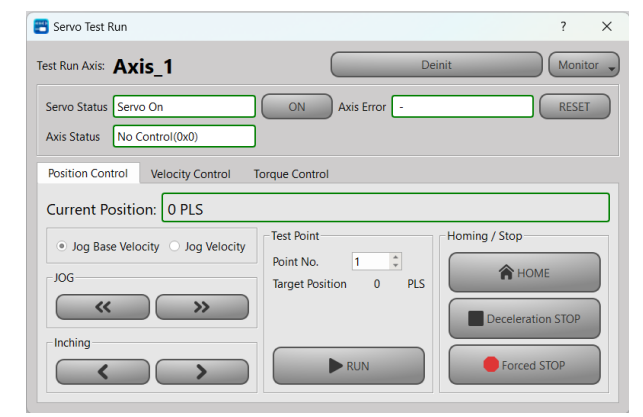
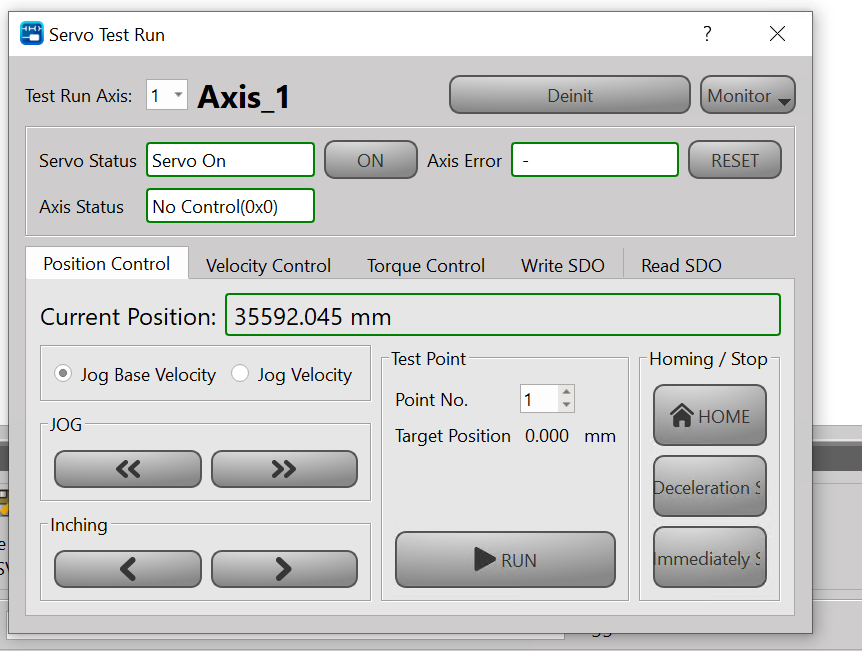
こちらはTest Runの操作画面です。
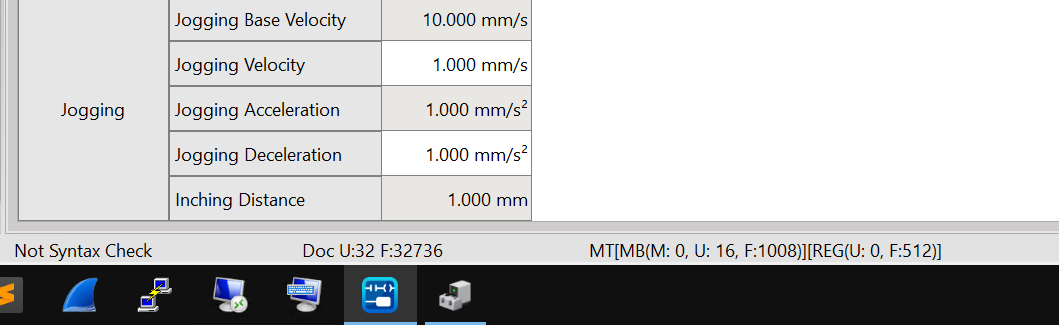
JogのSpeed設定はMotion Axis→Joggingから設定できます。
こちらの動画から動作確認できます。