
PLCNEXT#podmanでImagesを作成しよう
今回の記事ではPLCNEXTを使用しDockerイメージを作成し、podmanから起動させます。Docker Fileのコンセプトにも少し...
今回の記事ではPLCNEXTを使用しDockerイメージを作成し、podmanから起動させます。Docker Fileのコンセプトにも少し...

この記事ではWAGO にDockerを導入する手順だけではなく、WAGO PFC200 ControllerにDockerを使用するメリッ...

EXOR JSmart710MのTutorial第2話です。今回JSmart710MのVNC Viewr機能を有効にします。よろしくお願い...

今回の記事ではCtrlxのOPC UA Appsの使用方法やスムーズに導入できるように説明します。CtrlxのOPC UA Appsは、O...
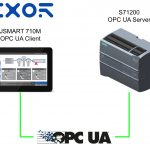
EXOR JSmart710MのTutorial第2話です。今回JSmart710MからOPC UA Clientを立ち上げ、S71200...
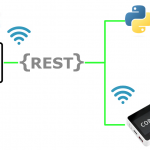
今回の記事ではctrlX CORE または ctrlX COREvirtual の REST API を使用して ctrlX Data L...
こちらは私の新しいTutorial SeriesでHMI と Codesysを揃えたEXOR社の JSmart710Mです。最初にパネルを...
こちらはpodmanでNode-redを使用するときNode Installできない問題に関しての解決方法です。 Error...
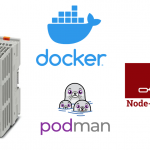
PodmanとDockerは、両方ともコンテナを作成、管理、実行するためのContainer Rutnimeで、AXCF 2152がFir...

今回はKeyence KV8000を使用しSocket通信を実装します。ClientはKV8000でサーバーはPythonのものになります...