Beckhoff#TwinCAT x IFM AL1320 Ethernet/IP IO-LINK Master_Part1
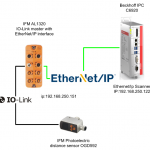
この記事はBeckhoff C6920とIFM のAL1320 Ethernet/IP IO-Link MasterでEthernet/I...
この記事はBeckhoff C6920とIFM のAL1320 Ethernet/IP IO-Link MasterでEthernet/I...

今回の記事では三菱のRJ71EIP91モジュールを使用しUCMMメッセージをTwinCAT3 Ethernet/IP Adapterに発行...
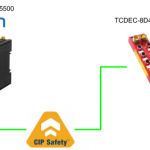
この記事ではNX-CSG320 OMRON CIP Safety Controllerと Molex CIP Safety Hash IO...

Thanks! 今回の記事はMana Design Works 様からのご提供でお送ります。内容は自体はシュナイダーですが、Mana...
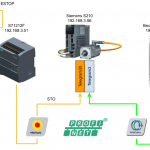
Beckhoff TwinCAT3とSiemens SINAMICS S210 PN を動かす第2話です。前回はTwinCAT3 Cont...
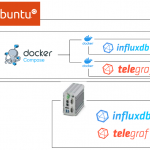
InfluxDBの第2話です。前回はDockerとInfluxdbの構築・あと実際Phoenix ContactのEdge PC EPC1...
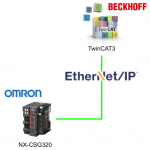
今回の記事ではTwinCAT3からTF6281 Ethernet/IP Scannerを立ち上げ、Omron NX-CSG320のInpu...

このシリーズではEtherCATの勉強メモや簡単な説明を少しずつ発信したいと思います。日本国内ではCC-LINKやCC-LINK IEはM...
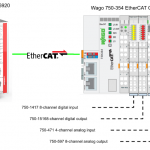
今回の記事ではBeckhoffのIPC C6920とWagoのEtherCAT Fieldbus CouplerとEtherCATネットワ...
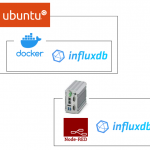
今回はInfluxDB第1話です。まずInfluxDB基本コンセプトを紹介・UbnutuのDockerからInfluxDBをインストール・...