
JTEKT#TOYOPUC NANO_Part1_新しいCPUを使ってみよう
こちらはJTEKTのTOYOPUC NANO 10GX CPUの新しいシリーズのTutorialになります!少し珍しいCPUですが、決して...
こちらはJTEKTのTOYOPUC NANO 10GX CPUの新しいシリーズのTutorialになります!少し珍しいCPUですが、決して...

Dockerは、アプリケーションのデプロイをコンテナで簡素化します。コンテナには必要なパッケージがすべて含まれており、ファイルとして簡単に...
こちらの記事ではBeckhoff TwinCAT3とKeyence SR750をProfinet連携する手順を1から説明します。(Yout...

こちらはKV StudioからModuleのFirmwareとプロジェクトの比較とアップデートの手順をメモします。Tool>Func...
ECONNREFUSED for Postgresの解決法のメモです。 下記のコマンドでSysstemを更新します。Containe...
こちらのメモではno pg_hba.conf entry for hostの解決法になります。OpManagerにバンドルされているPos...
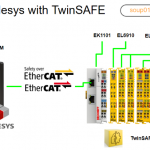
こちらの記事ではCodesysとCODESYS SAFETY FOR ETHERCAT SAFETY MODULEを利用し、Beckcho...
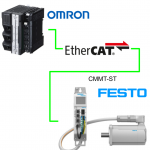
今回の記事ではオムロンのNX1-9000を使用しEtherCAT Masterを立ち上げ、FESTO社のCMMT-ST Servo Dri...

HOKUYOがIIFES2024で発表したAGV対応の国内メーカーSafety Controller HSC-A100-ENCの使用方法な...

こちらはキーエンスの新しいシリーズ、小型二次元コードリーダSR-750シリーズの記事です!今回はSR-750を使用するには必要な簡単セット...