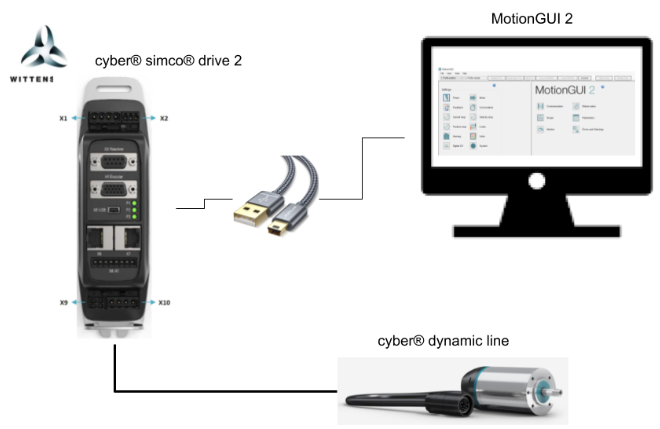
このシリーズではWittensteinのcyber® simco® drive 2とcyber® dynamic lineを使用し試運転からPLCと繋がるまでを紹介します。
最初の第1話でまずMotionGUI2ツールからDriveを試運転します。
よろしくお願いします。
Thanks!
この記事はWittenstein Japanが機材を貸してくださったおかけです。
Wittenstein
WITTENSTEIN cyber motor は、高度な技術が求められるサーボモータと駆動用電子部品に加えて、非常に大きな出力密度を発揮する完結型メカトロニクス駆動システムの開発および製造を行っています。 超高真空、高温環境、放射能環境に対応する特殊モータの専門技術も保有しています。

Address
ヴィッテンシュタイン・ターナリー株式会社
〒386-0005
長野県上田市古里99-5
HP
https://cyber-motor.wittenstein.jp/
cyber® simco® drive 2
cyber® simco® drive 2 サーボコントローラ、cyber® dynamic lineモーターシリーズと cyber® dynamic systemは、すべての点で理想的な組み合わせです。
- 多彩なFieldbus Support(CANOPEN・EtherCAT・EtherNet/IP・Profinet・Sercos)
- Driveサイズは小さく、省スペースで積み重ね可能
- SIL3に内蔵された STO (Safe Torque Off) 安全機能の接点あり
- 電子銘板による、モータの自動的で安全なパラメータ化
- サイズ17 ~ 40 mmの動的能力の高いサーボモータ (オプションで減速機とボールねじドライブ)と連携
- デジタル入出力端子付き

cyber® dynamic line
cyber® dynamic line のブラシレスサーボモータは、高品質ステンレス鋼ハウジングとアブソリュートエンコーダがシングルターンおよびマルチターン で、信頼性と精度高いSolutionを提供してます。 二重シールドシングルケーブルソリューションは、工業装置向けに設計されており、ケーブルキャリアで使用できます。
- 工業用グレードコネクタ付きシングルケーブルソリューション
- 保護等級 IP54 (装着時)
- DCバス電圧 48 VDC
- 内蔵フィードバックシステム
- アブソリュート シングルターン エンコーダ
- インクリメンタルエンコーダ
- 高品質ステンレス鋼ハウジング

MotionGUI 2
MotionGUI 2はWittenstein社が提供するCommissioningやDriveの構築ソフトで、簡単なInterfaceでDriveの診断・データLogging・試運転・パラメータ設定できる無償なツールでございます。
基本的にMini USBを使用しDriveと接続しますが、EthernetIPの場合はLAN接続もできます。
Tools Installation
WittensteinのWebからMotionGUIをDownloadしてください。そのソフトはSiemensのStarter、TwinCATのNC Controller Panelのようなドライブを試運転・パラメータ設定・診断するために使われているソフトです。
Next>で進みます。

ライセンスに同意し、Next>します。
Nextします。
Installボタンでツールをインストール開始します。

しばらく待ちます。
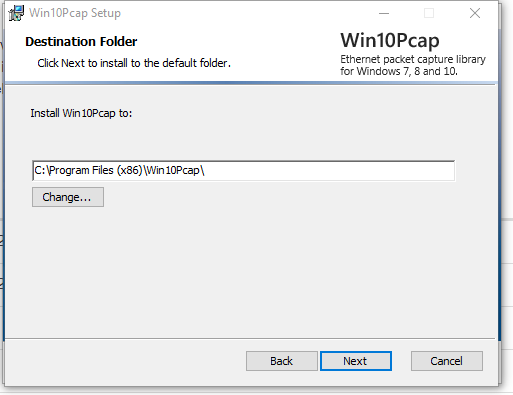
途中でWin10PcapのPackageインストールがはじまります。
ライセンス同意し>Nextします。

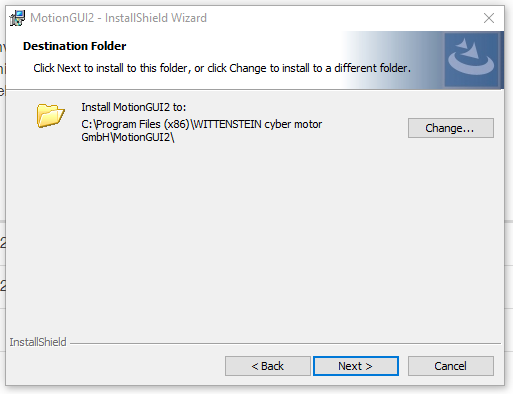
インストールのPathを設定しNextします。
インストール開始します。
暫く待ちます…
Done!MotionGUI2がインストール完了しました。

Connect your PC to Drive!
ドライブとPCの間は市販のMini USBで繋がりましょう。

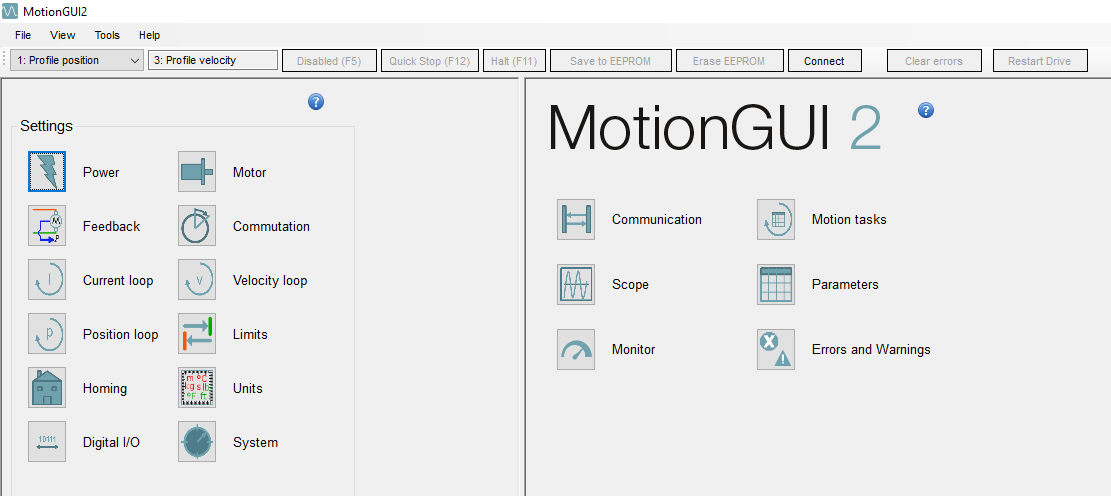
MotionGUI2を起動します。

Driveと通信設定します。先程はUSBをさしたので、もちろん”USB communicaation”を選びます。

MotionGUI2の操作画面に切り替えます。
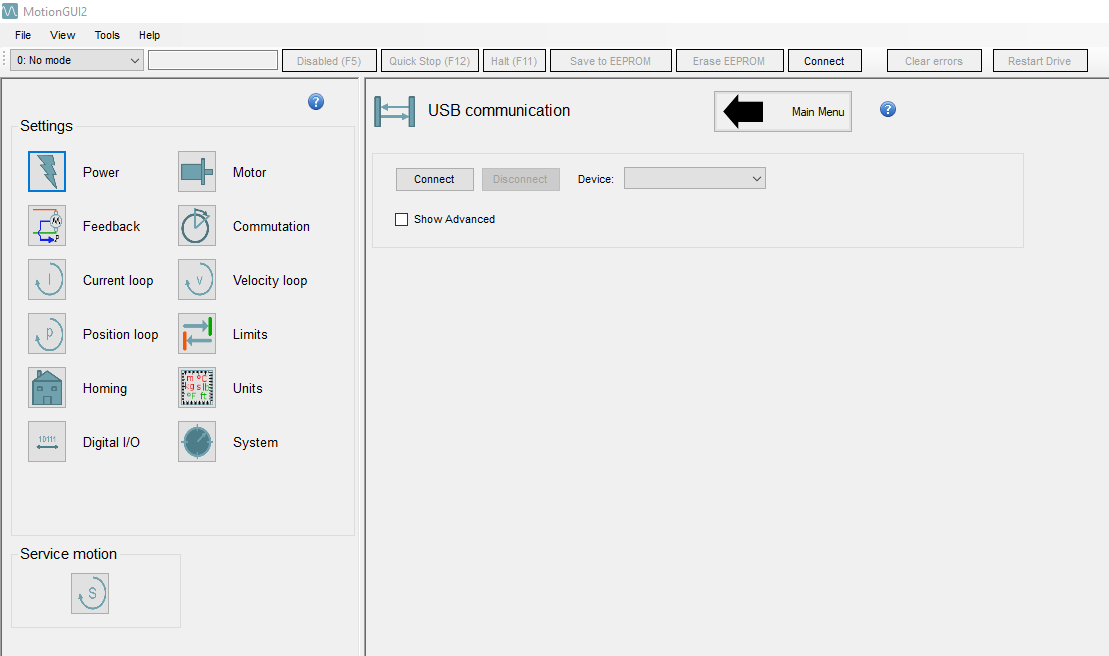
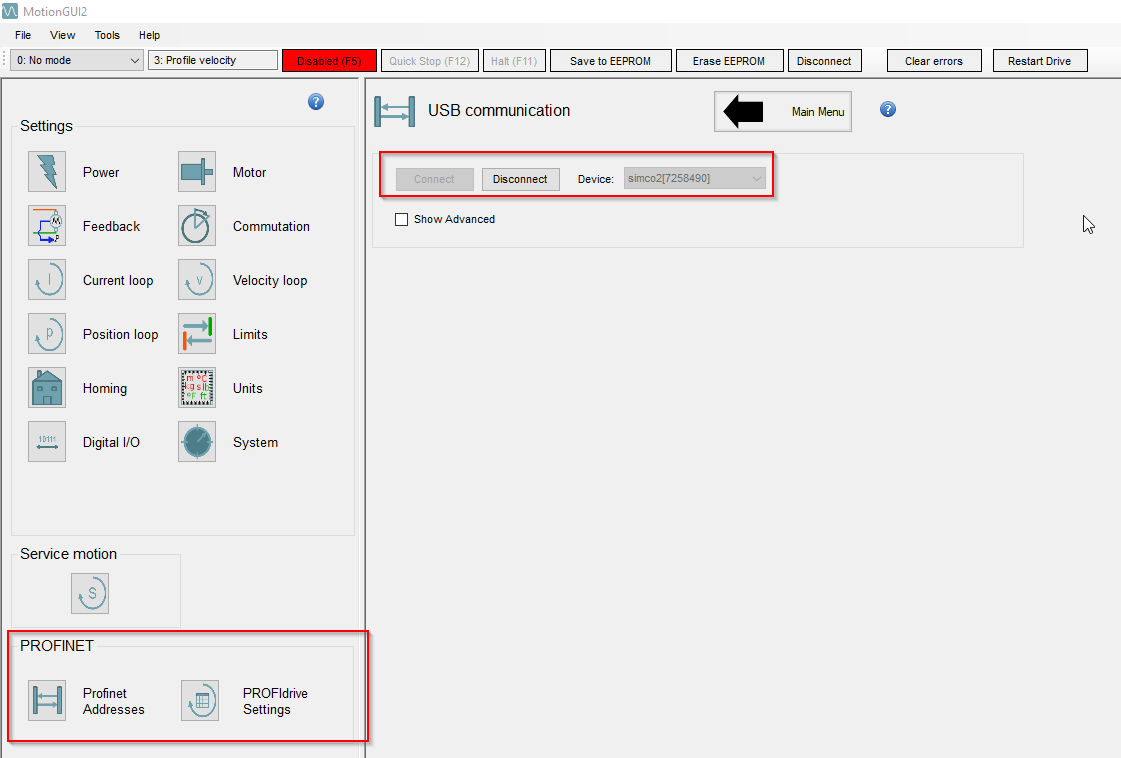
USB communicaation”のTabからDeviceを選び(今回はsimco2)で、”Connect”します。

Done!Connectボタンが押せなくなり、このDriveはPROFINET通信仕様なので、Profinet関連の項目も表示されました。
Check the Motor Data
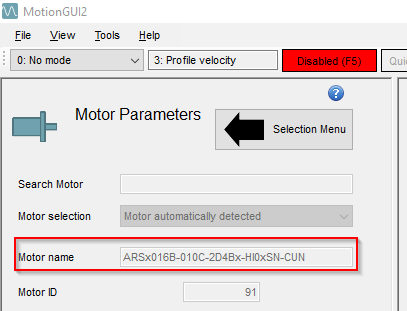
最初にDriveと接続してるServo Motorが認識してるかを確認するため、Motorをクリックします。

Motor名とIDが表示されてるってことは接続Okです。
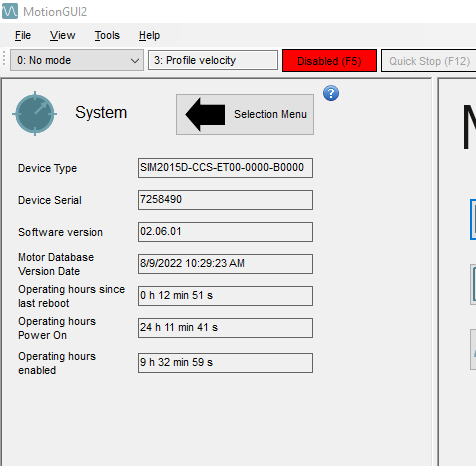
System
System TabからMotorやDriveの一般情報を確認できます。
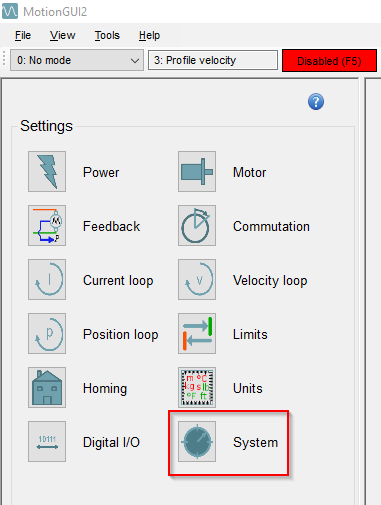
デバイスのシリアル番号・種類・運転時間などを確認できます。
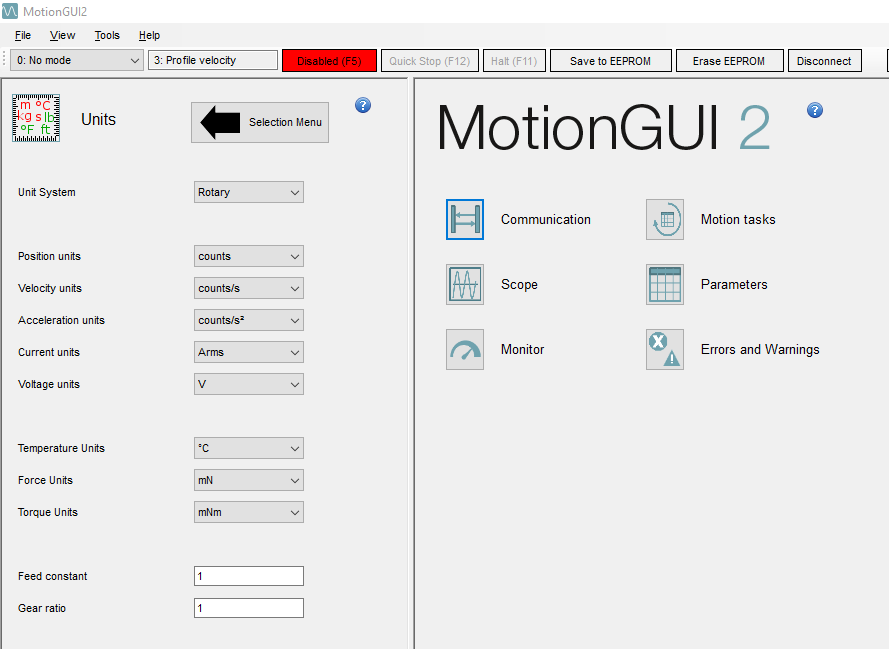
Units
次はUnits ボタンをクリックし工学単位を設定します。

中にUnit System、つまり軸の種類はLinearかRotaryか、Positionの単位など細かい設定があり実際のアプリケーションに合わせてください。
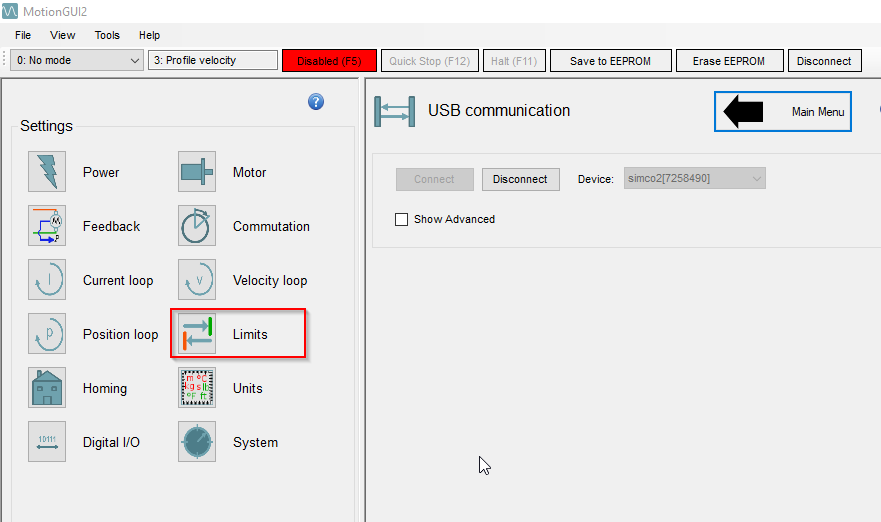
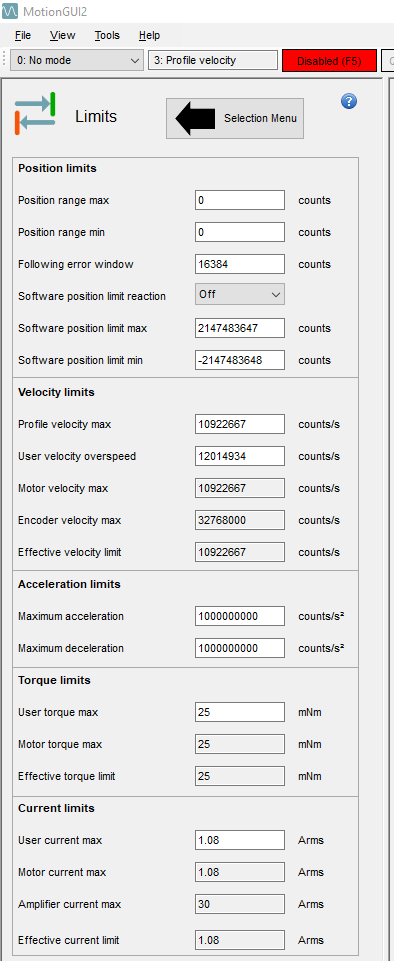
Limits
Limits設定で制限速度やSoft Limitなどの設定を行うことできます。
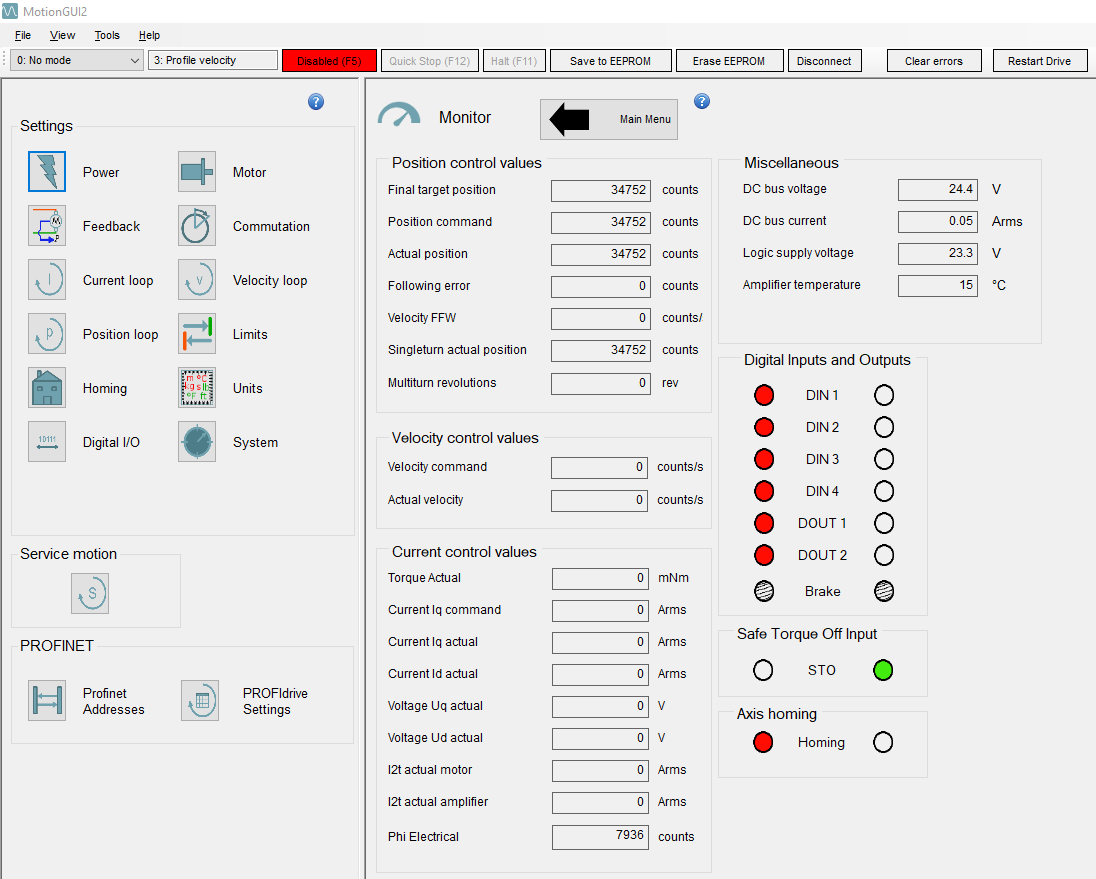
Motion Status
Monitorで現在Motorの運転状態を確認できます。

現在位置・速度・デジタル入出力状態など確認できます。
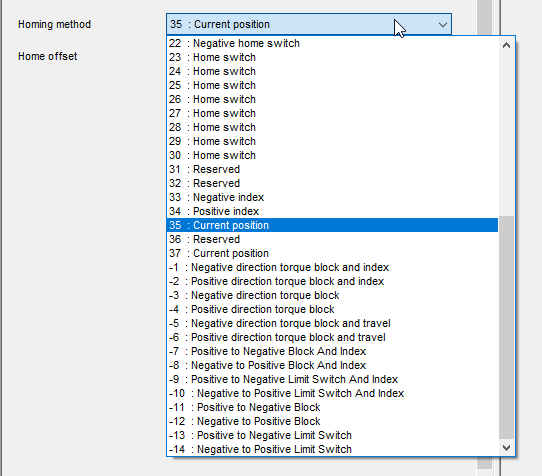
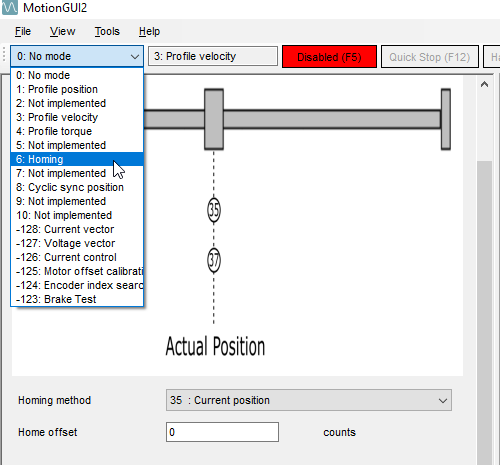
Homing
基本の設定パラメータが終わったら次はHomingを行います。

Homing Methodには様々な原点回帰の方法がありますが、この記事では一番シンプルな、
35:Current positionを使用します。

実際にDrop-Listからアプリケーションに合わせた原点回帰の方法も設定できます。
Homing Methodを選んだら、一番したまでScrollしStartボタンでHoming始まります。

Homingが始めるとおもったら、ツールがErrorがあり、間違ったOperation modeが選択されたのエラーが出ています。

よくみたらいまは0:No modeになっていますね。
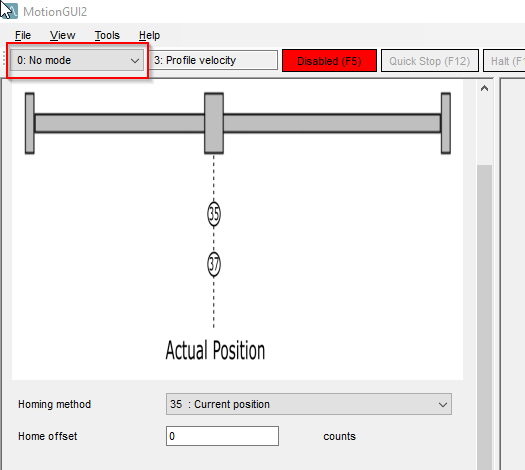
そのまま0:Modeのところから6:Homingを設定してください。
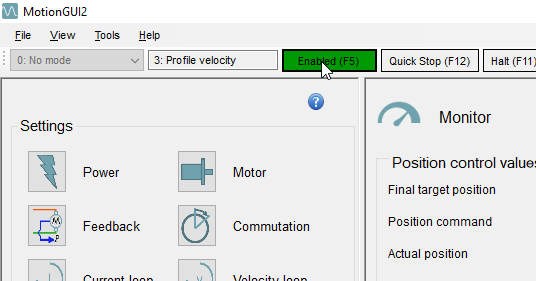
Enable
DriveをEnableします。
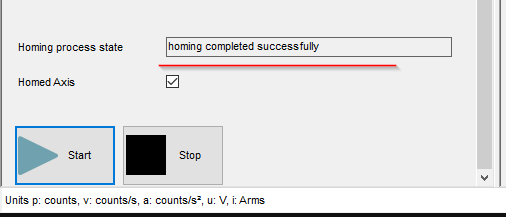
Start to Home!
一番下にScrollしPlay ButtonをクリックしHome 操作を行います。

Done!Homing Process Stateに”Homing Completed successfully”のメッセージが表示されればOKです。
Service Motion
ここまで来たらMotorを回してみましょう。Service motionボタンをクリックします。

Service motion画面に変わります。Profile ボタンからDriveの制御モード(位置決め・定速・トルク制御)を設定できます。

Enable the Drive
実際にService MotionからMotorを動かすには、まずはDriveを有効にする必要があります。
Disableボタンをクリックします。

エラーがなければ、Disabelが自動的Enableに変わります。

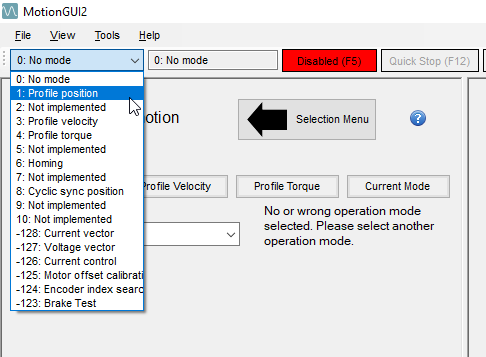
Profile position
この記事では”Profile postion”を試してみます。Drop Listから0:No modeから1:Profile positionに設定します。
Jogging Operation
Profile position Profileに変わり、ModeでJoggingを試します。

この動画から動作を確認できます。
Wittenstein.Jog Operation with MotionGUI2
Relative Movement Operation
この動画から動作を確認できます。
Wittenstein.Move Relative Operation with MotionGUI2
Absolute Movement Operation
この動画から動作を確認できます。
Wittenstein.Absolute Movement Operation with MotionGUI2
Motion Task
次はWittensteinのMotion GUI 2のすごく面白い機能を紹介します。それはMotion Tasksです。Motion Taskを使用することによってPLCの上位Systemでなくても単体で簡単なMotion プログラムを作成することができ、なおかつSTO端子やDIDO端子と連携すればわざわざ高いMotion 制御のCPUを購入する必要もありません。Motion Tasksをクリックします。

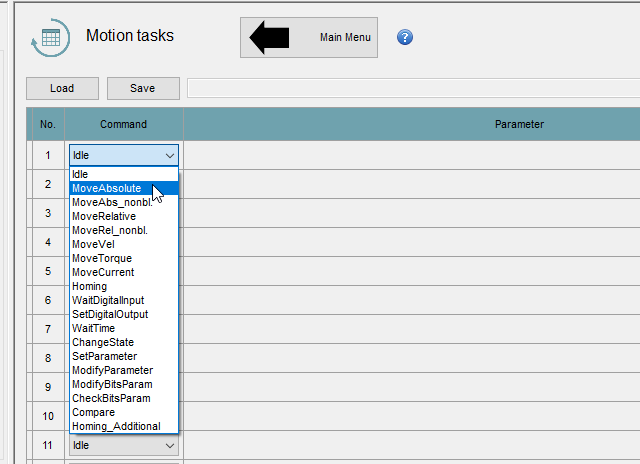
Motion Taskプログラムの作成画面が表示されます。
No.ではプログラム番号で、Commandは該当する列のプログラムにどんなコマンドを実行するか。そのコマンドは位置決めでもよし、なにかのデジタル入力待ちでもよし、多彩な制御コマンドを設定できます。

では試しにNo1のCommandから”MoveAbsolute”を選択します。MoveAbsoluteは絶対位置決めのコマンドです。
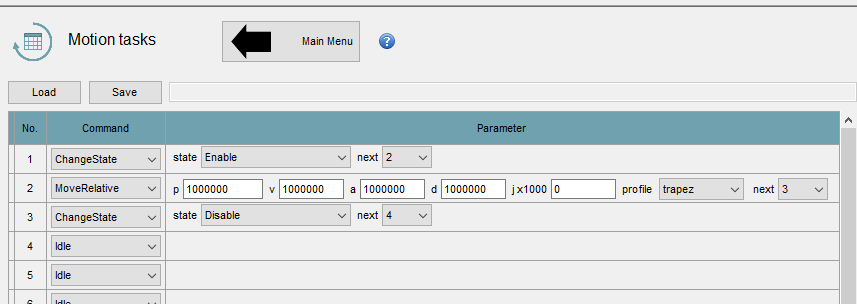
Motion Taskは以下になります。
No1. Driveを有効にします。
No2 .MoveRelativeコマンドを実行します。
- p=position
- v=速度
- a=加速度
- d=減速度
- j=Jerk
- next=そのTask実行終了したあとにJumpするNo、今回はNo3になっています.
No3.はDriveの状態を無効にします。
この動画から動作を確認できます。
Motion with DI
最後はDriveについてるデジタル入力をMotion Taskに使ってみます。
Motion TaskのNo3にWaitDigitalInputコマンドを追加します。
- number=監視するデジタル入力
- level=そのデジタル入力の監視状態
- next true=条件成立するときにJumpするコマンドLine
- next false=条件成立しないときJumpするコマンドLine
- timeout[ms]=デジタル入力の監視する時間のTimeout設定、0=Timeoutなし
- next timeout=Timeoutが発生したときJumpするコマンドLine

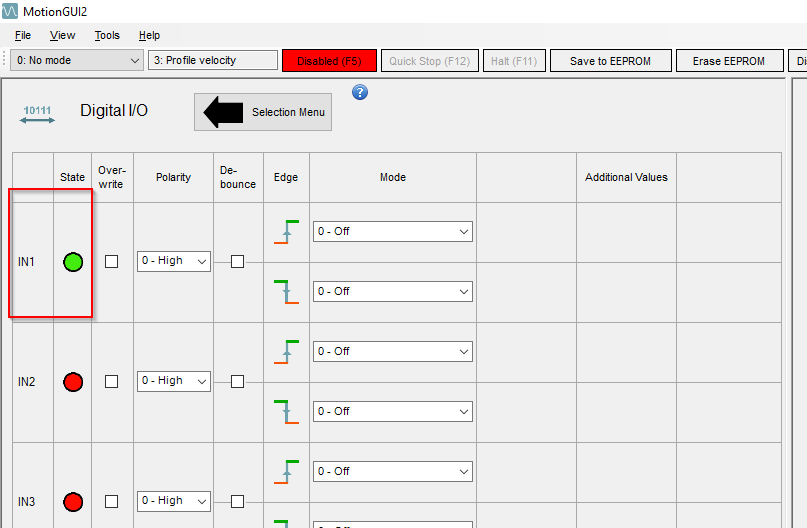
Digital I/O をクリックします。
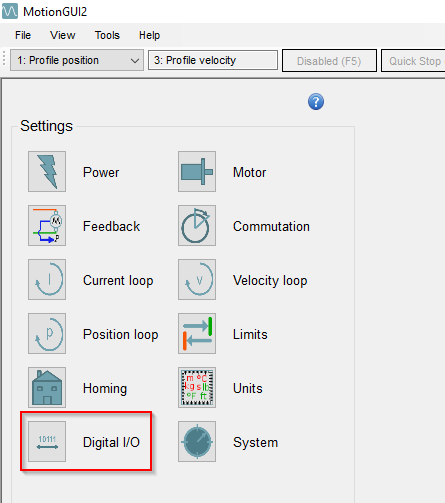
各IO 接点の優先順位・状態などを確認や設定できます。

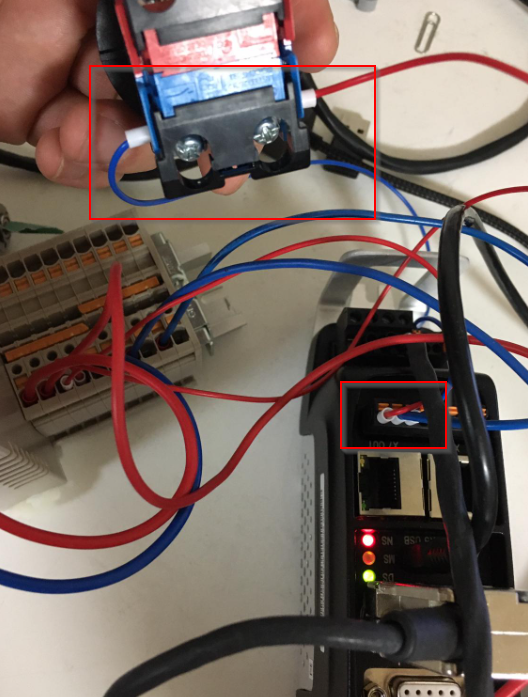
Wiring
Result
この動画から動作を確認できます。