OmronのSysmac Studioには3D Visualizer機能がありまして、同じ環境でロボットやProcessをSimulationできます。
今回はまずNJ‐R ロボットControllerから直接シミュレーションする方法を紹介します。
Create New Project
Sysmac Stuidoを起動します。

左のOfflinceからNew Projectで新規プロジェクトを作成します。

Project Propertiesの設定画面が表示されます。
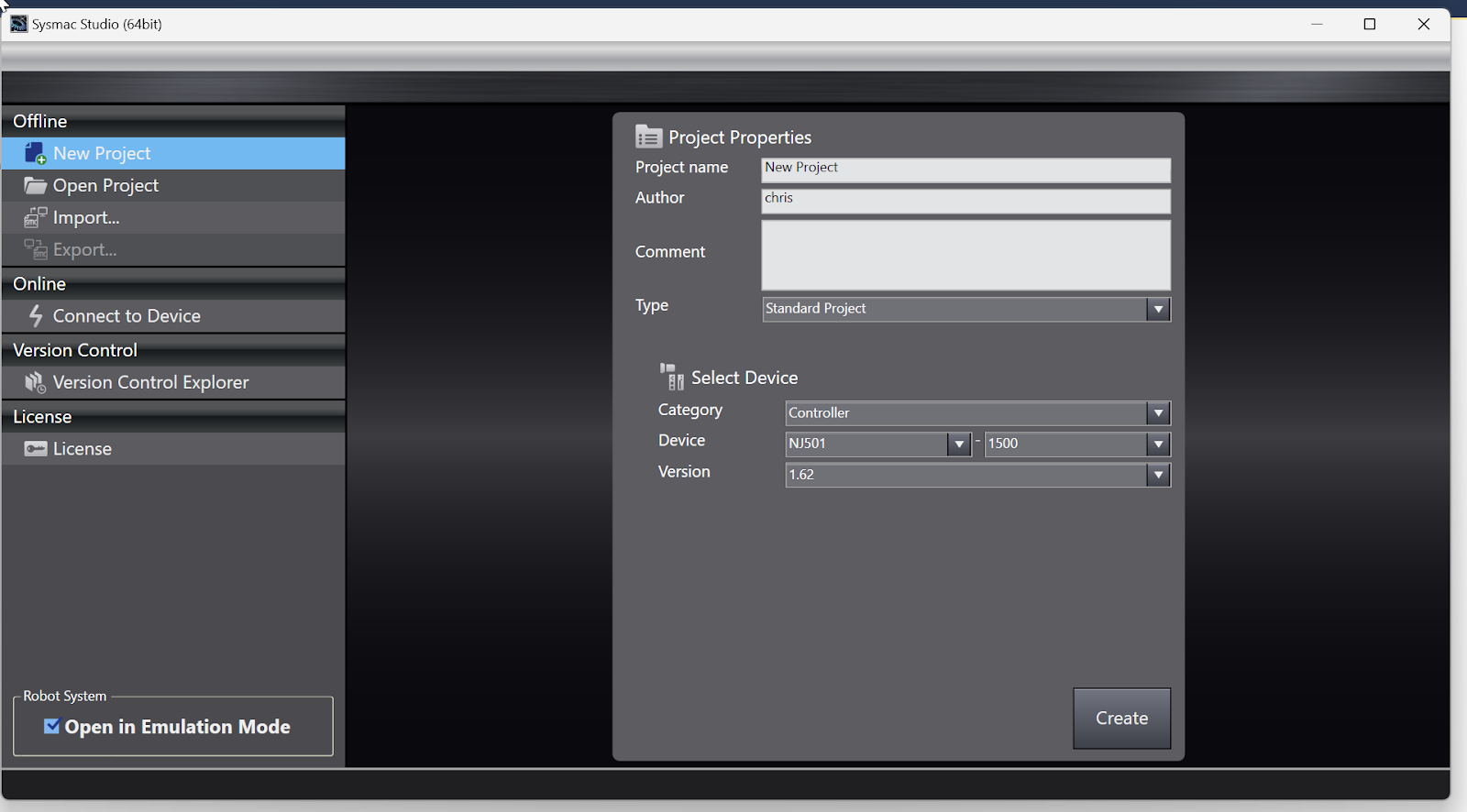
Select Device
CategoryはControllerに設定し、DeviceはNJ501>R520を選択して”Create”ボタンで新規プロジェクトを作成しましょう。

Done!新規プロジェクトを作成しました。

EtherCAT Configuration
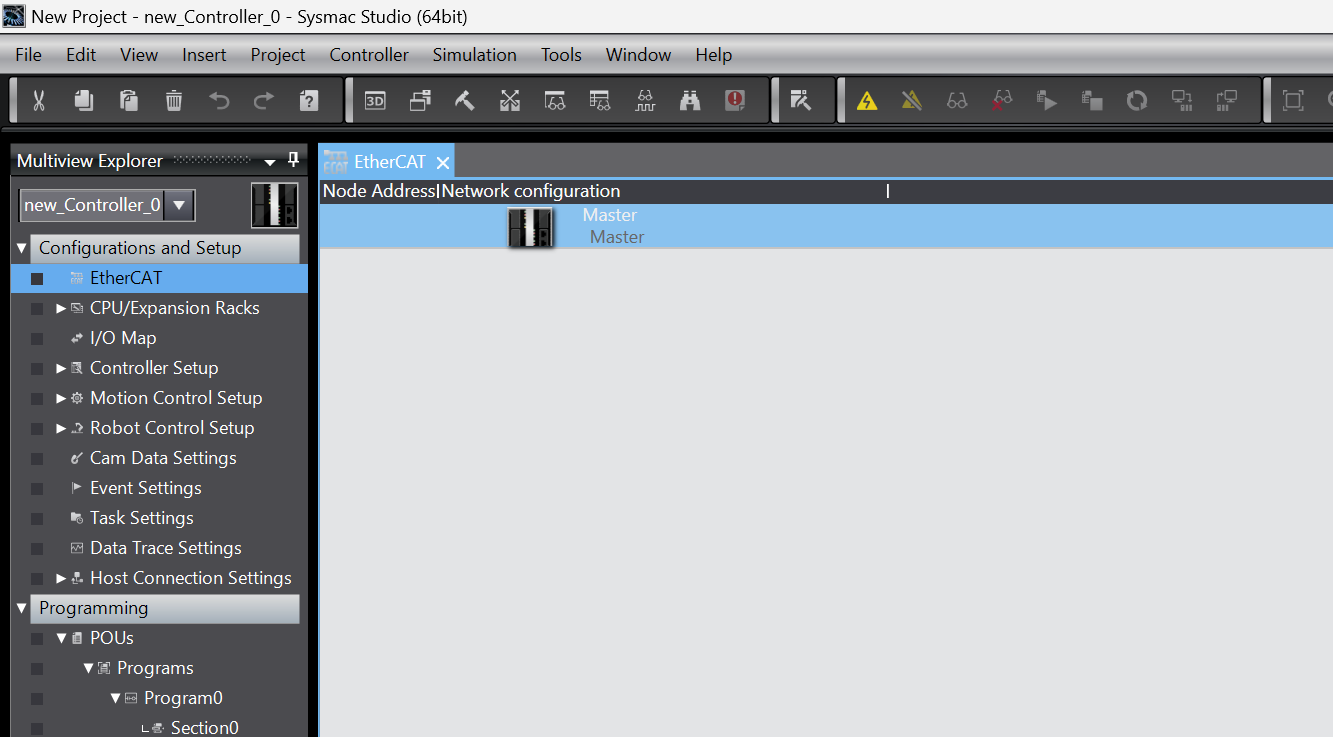
ロボットをEtherCAT ネットワークに追加するため、Configurations and Setup>EtherCATを開きます。
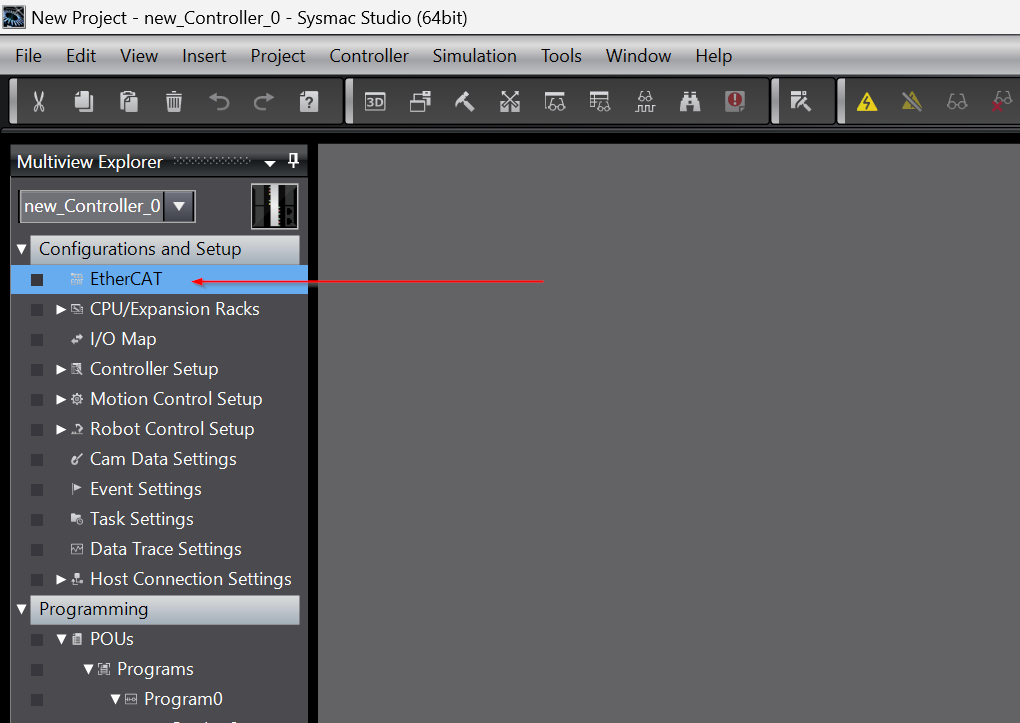
EtherCATのNetwork構築画面が表示されました。
Add Robot
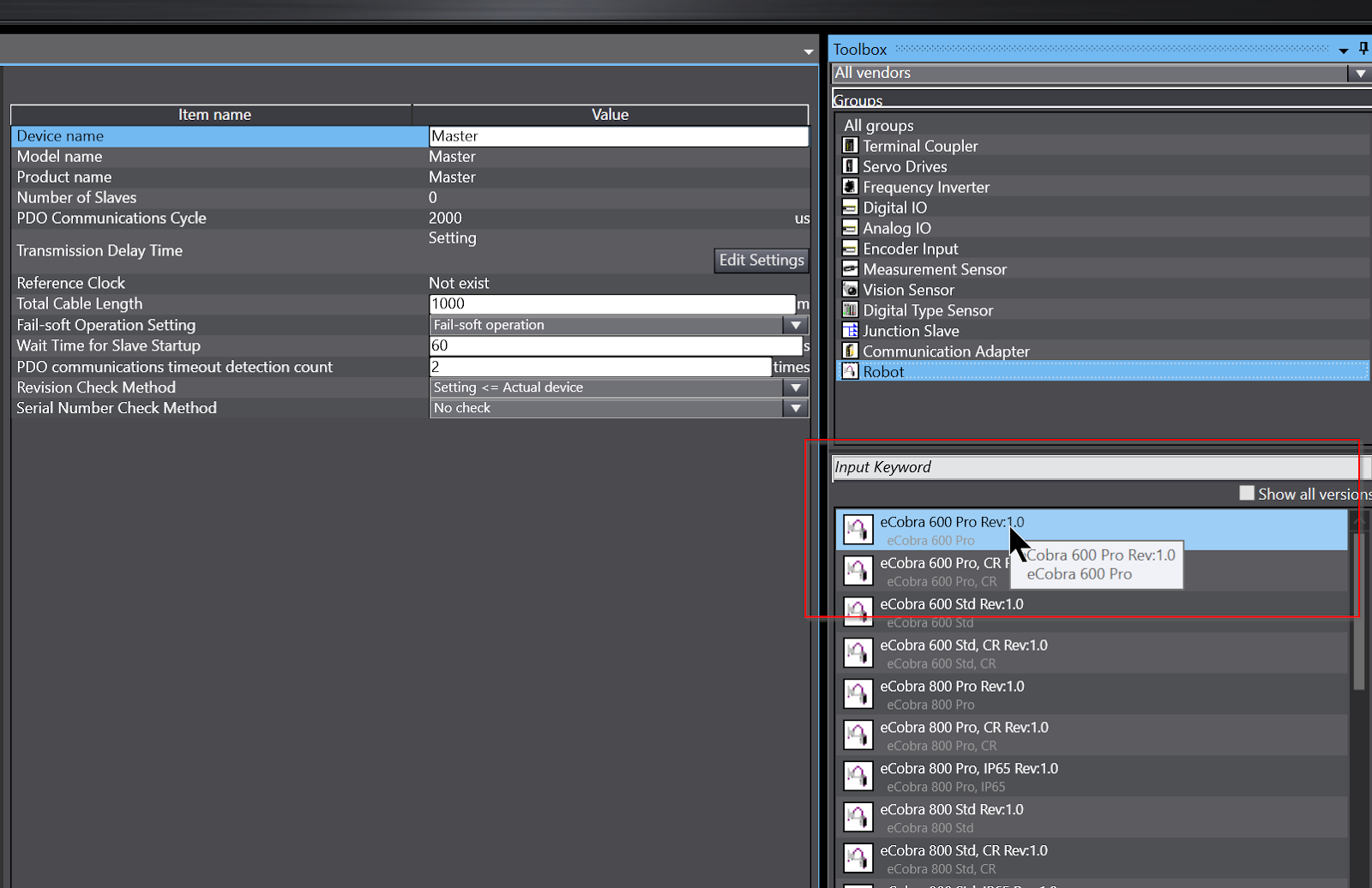
右のToolboxからRobotのカタログがあり、このカタログを選択してください。

今回はeCobra 600 Proを使用します。
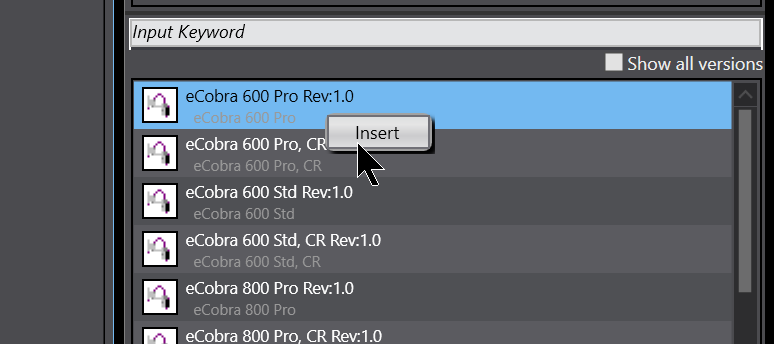
そのロボットを右クリック>Insertします。
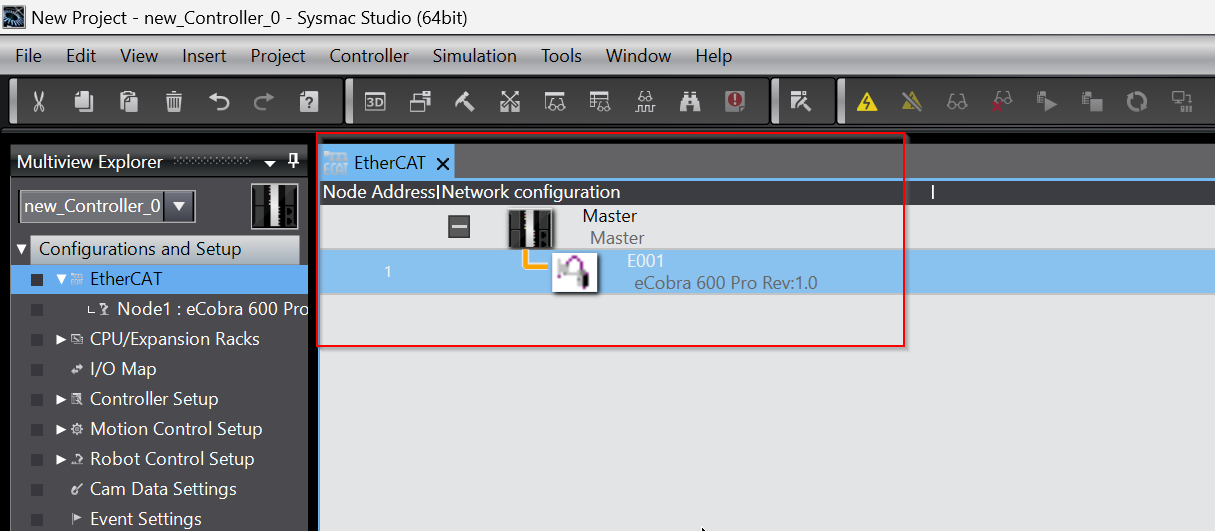
Done!ロボットが追加されました。
Enable emulation mode
今度はシミュレーションModeを有効にするため、Controller>Enable emluation Modeをクリックします。

OKで進みます。
Run the Simulation
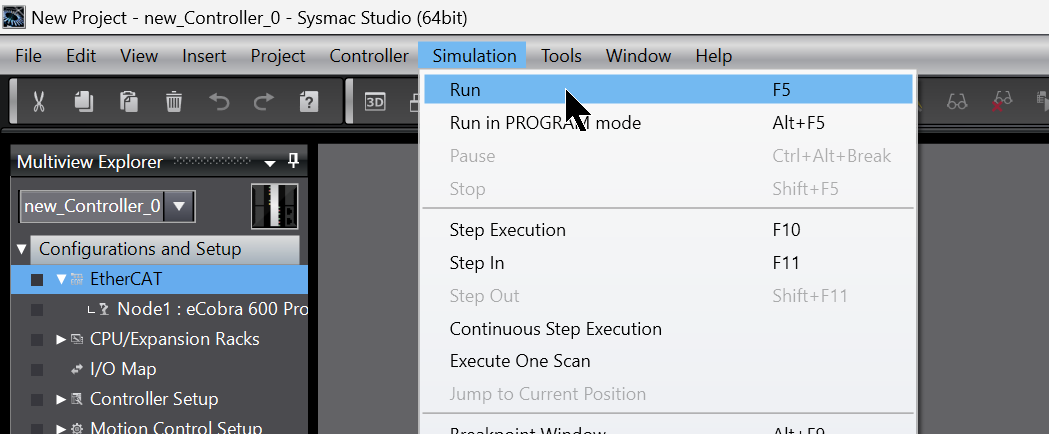
最後はシミュレーターをRun Modeに切り替えるため、Simulation>Runします。
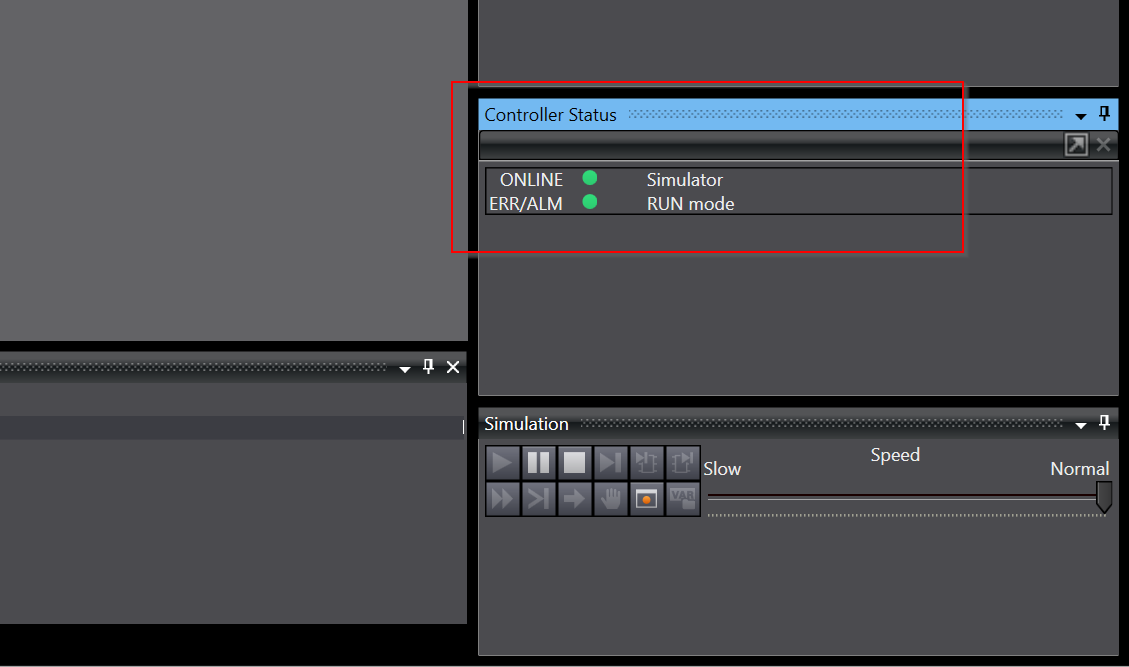
Done!Controller Status OnlineとERR/ALMのLEDが緑になりました。
Activate 3D Visualizer
OmronのSysmac Stuidoから3DVisualizer画面を表示させます。

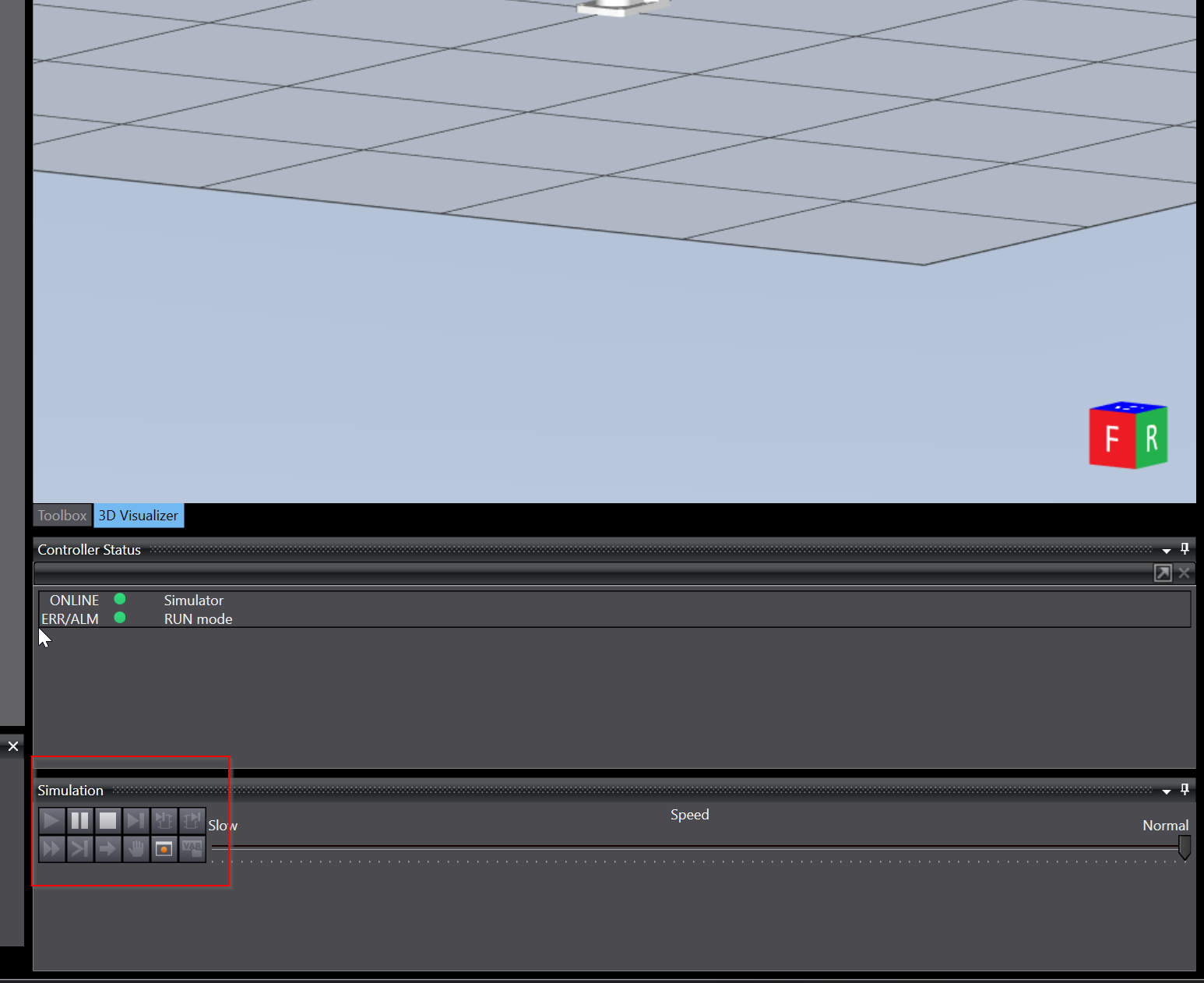
Done!3Dシミュレーションはこれで立ち上げました。

SimulationのTabからSimulationの開始・停止・速度などを設定できます。
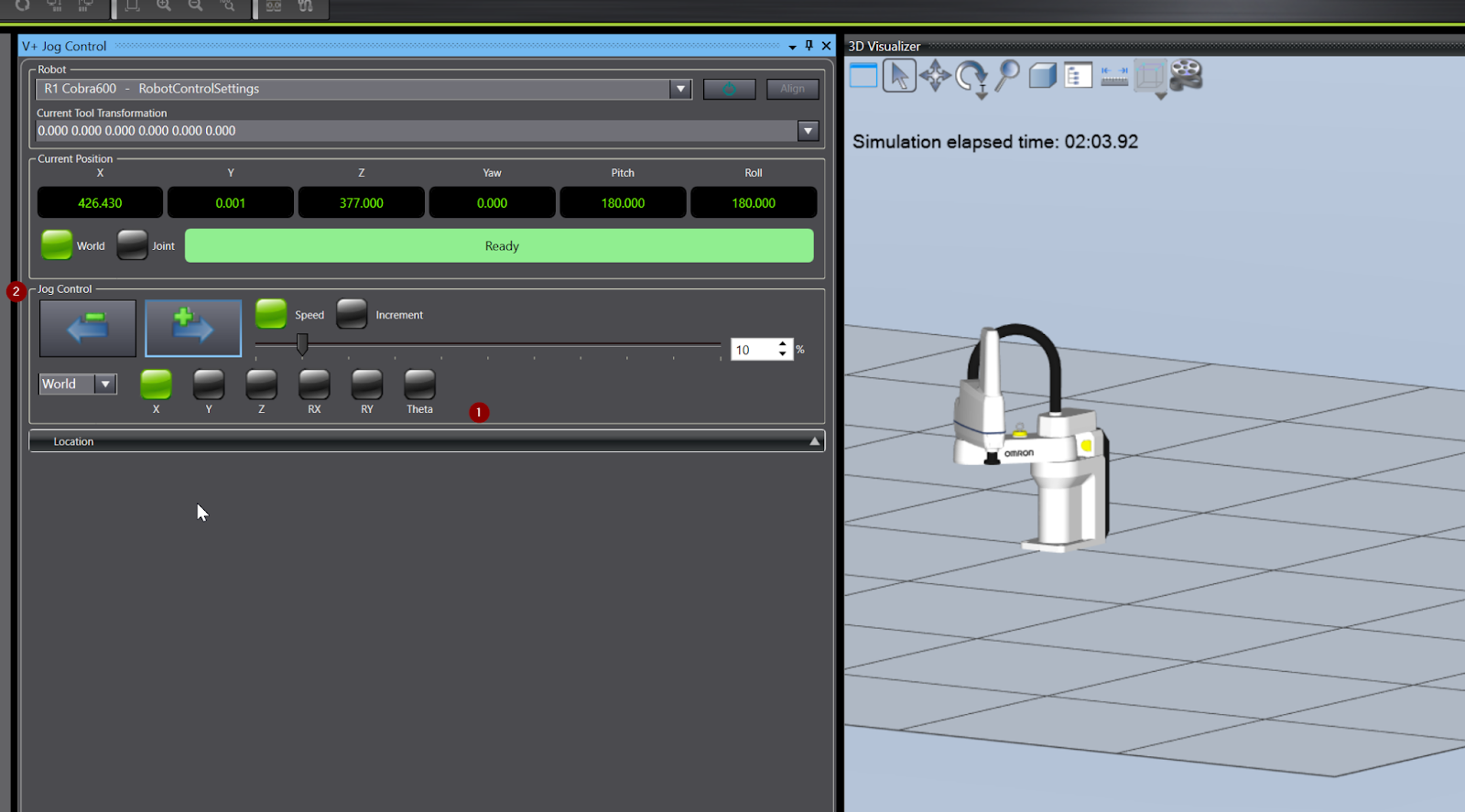
V+ Jog Control Panel
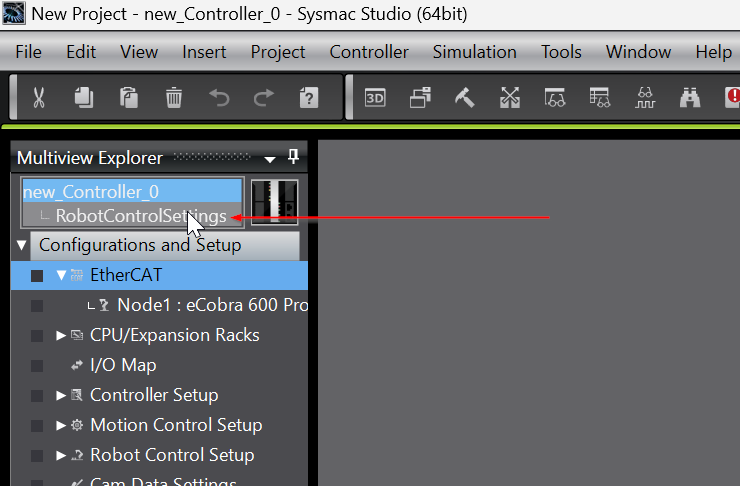
Sysmac Studio上でロボットを動かすにはJog パネルが必要です。まずMultivew ExplorerからRootControlSettingsを選択します。
次はView>V+ Jog Control 画面を有効にします。
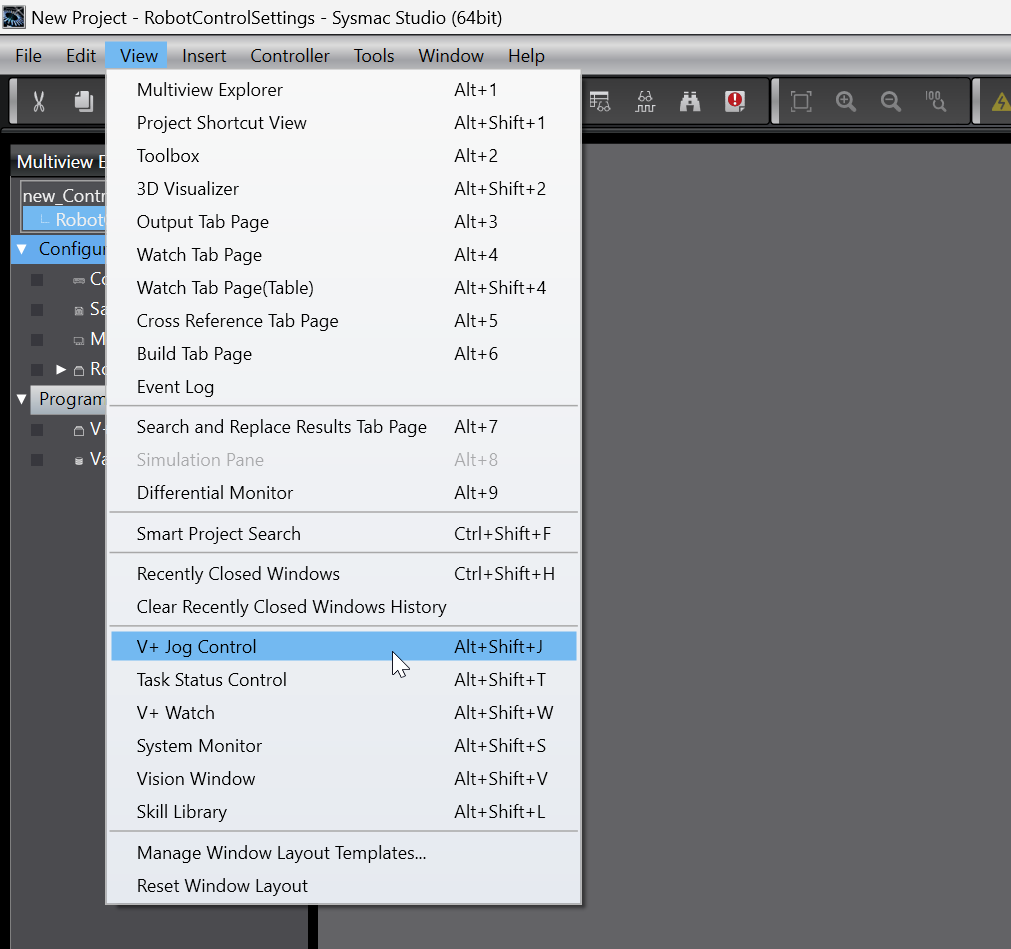
Done!

V+ Jog Control 画面からロボットの電源ON/OFF・移動操作を行うことできます。

Play with Robot!
さ、これからSysmac Stuidoからロボットを遊んでいきましょう。
Power ON
赤枠のボタンでロボットの電源ON/OFF操作できます。

黄色のRobot power OFFが表示されたら、いまロボット電源OFFしてます。

下図のようにロボット電源ON/OFF操作できます。
3D Visualizer Area
次はSysmac Stuidoの3D Visualizer操作を説明します。
Edit Workspace position
Edit Workspace positionからロボットの位置を調整できます。
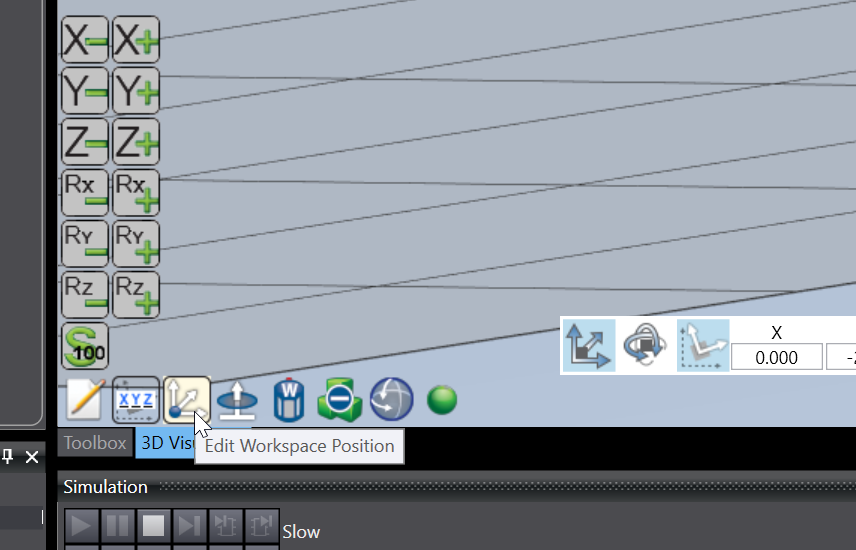
ロボットにXYZの座標ICONが表示されました。
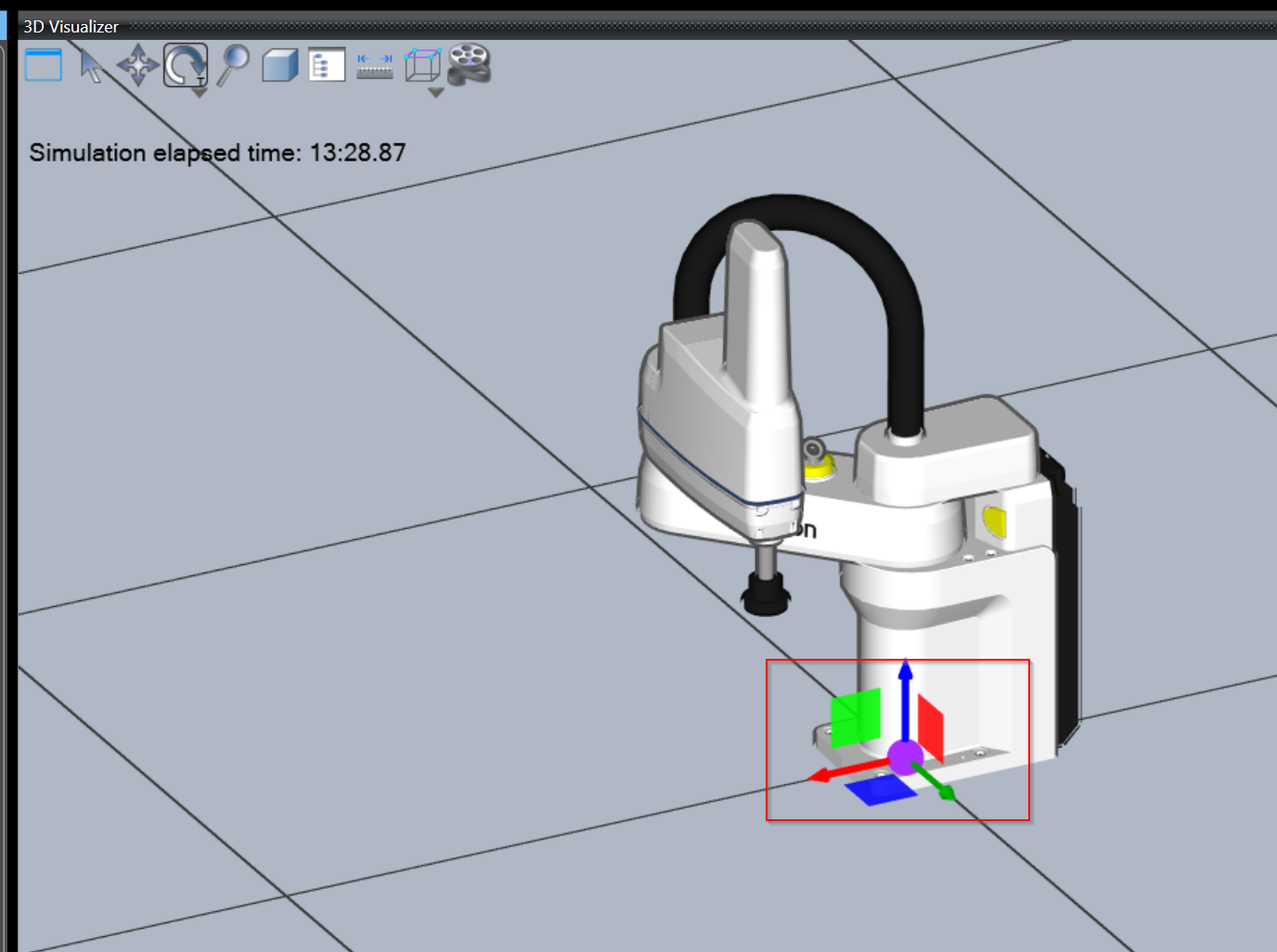
下図のようにロボットの位置を調整できます。

Rotate
次はRotate機能でロボットの位置を回転できます。
ロボットに青い丸いICONが表示されました。

下図のような操作でロボットを回転できます。
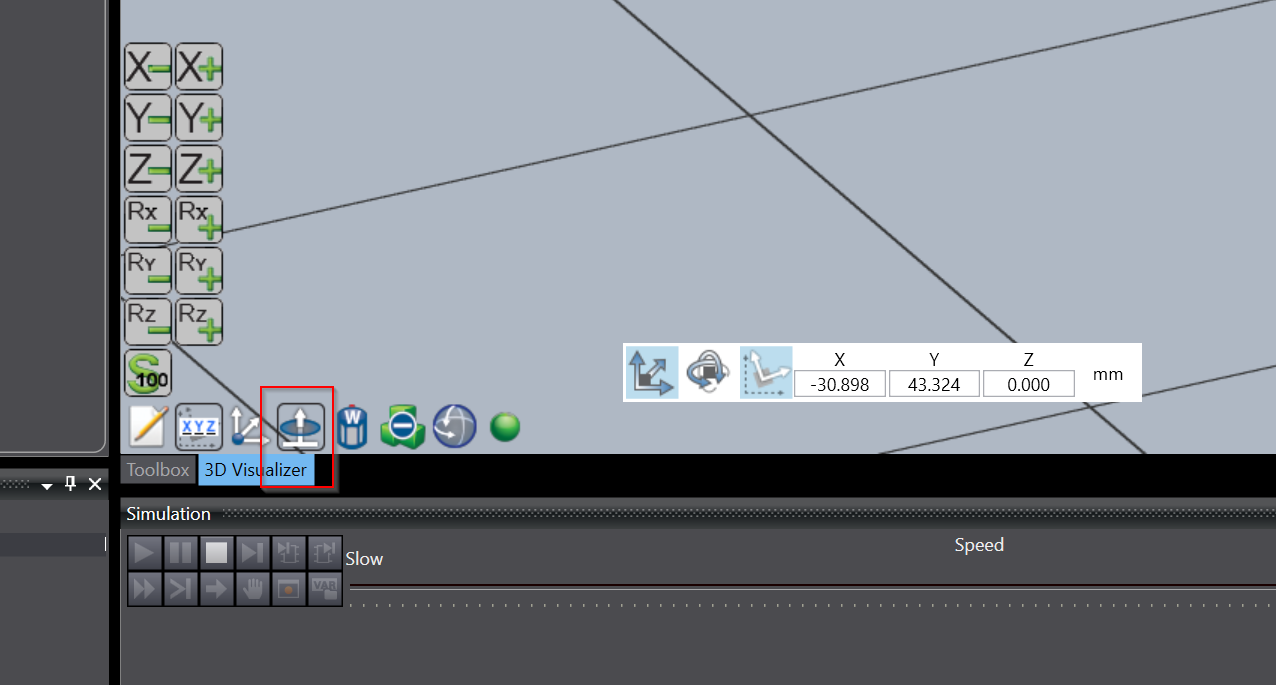
Adjust directly
3D Visualizer AreaにあるX Y Z Fieldから直接に数字を入力し、ロボットの場所を設定できます。

Robot Work Envelope
Show Robot Work Envelopeボタンをクリックすると、該当するロボットの作業範囲を表示できます。
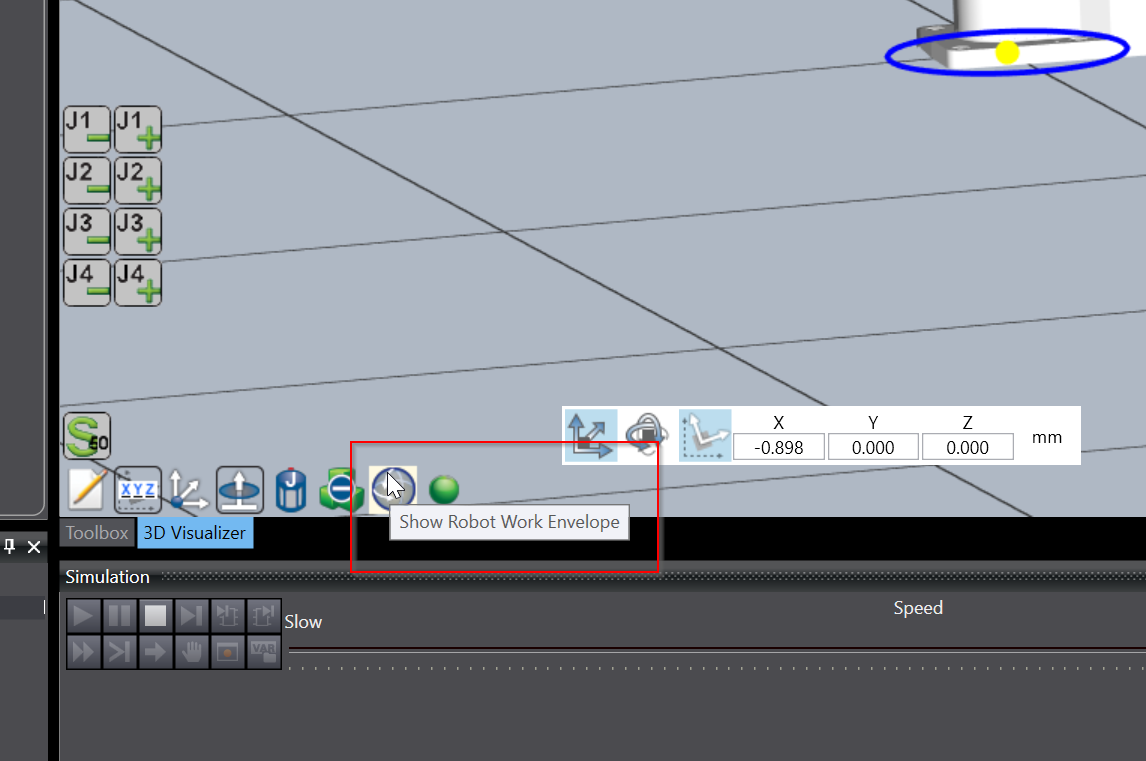
このように、灰色のAreaは該当するロボットの作業範囲になります。

Move Your Robot
次はロボットを実際に動かしてみましょう。
World Display
Jog Controlをクリックするとロボット操作ができます。
そして動かしたい軸をX/Y/Z/RX/RY/RZの選択も忘れずに。
下図のような操作になります。

Joint Display
今度はJointを選択すると表示がJ1/J2/J3/J4に代わり、各軸の位置表示に変わります。

下図のような操作になります。

As TCP
もちろん、Sysmac StuidoでもTCPからロボットの操作ができます。
Mouseをロボットの先端に移動するとICONが変わるとわかります。
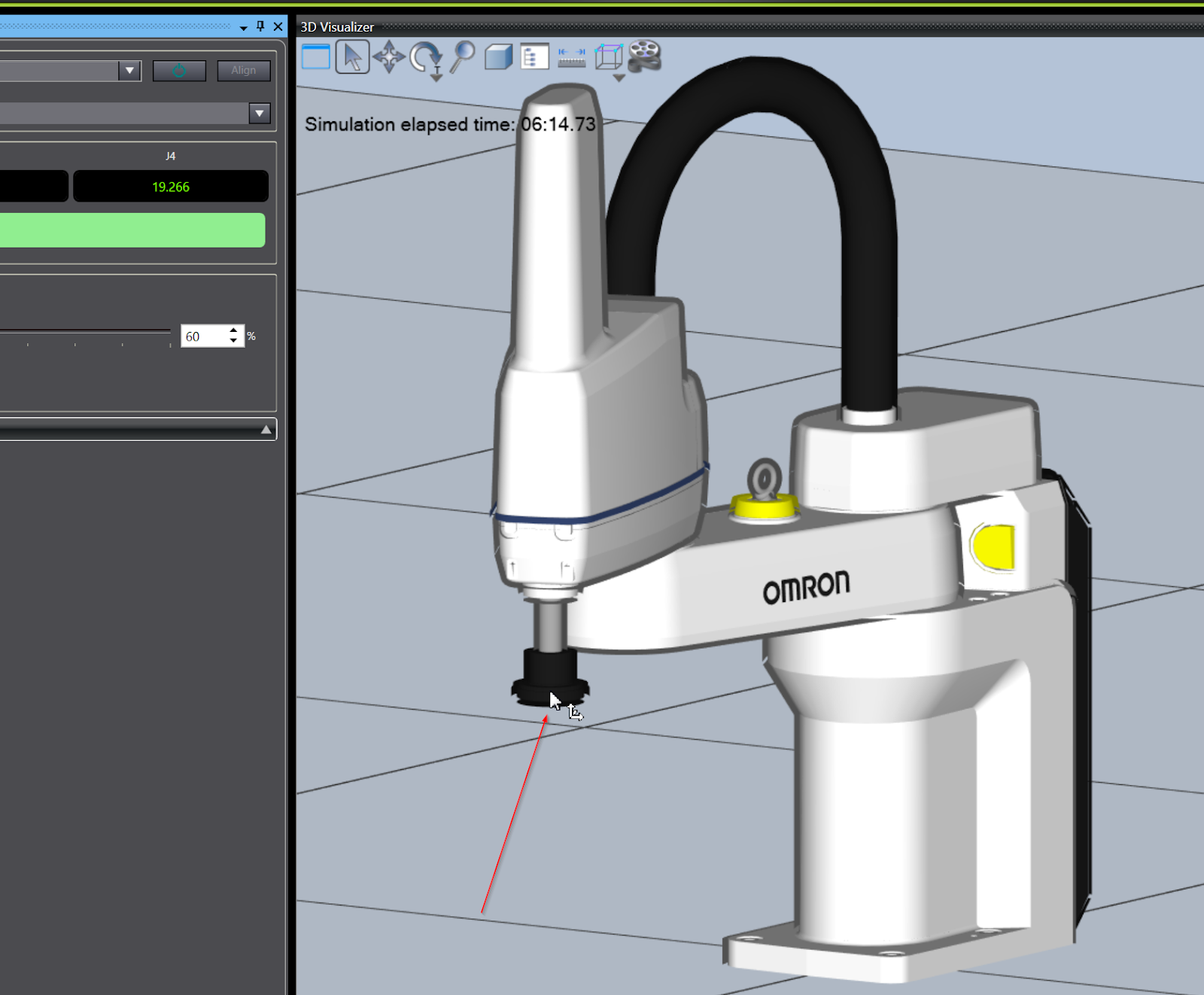
下図のような操作になります。

World Moving Directly
Jog パネル以外にもX/Y/Z/RX/RY/RZボタンがありますね。実はこちらのボタンから直接座標でロボットを動かせます。

下図のような操作になります。
Jog Moving Directly
今度は赤枠のボタンをクリックします。
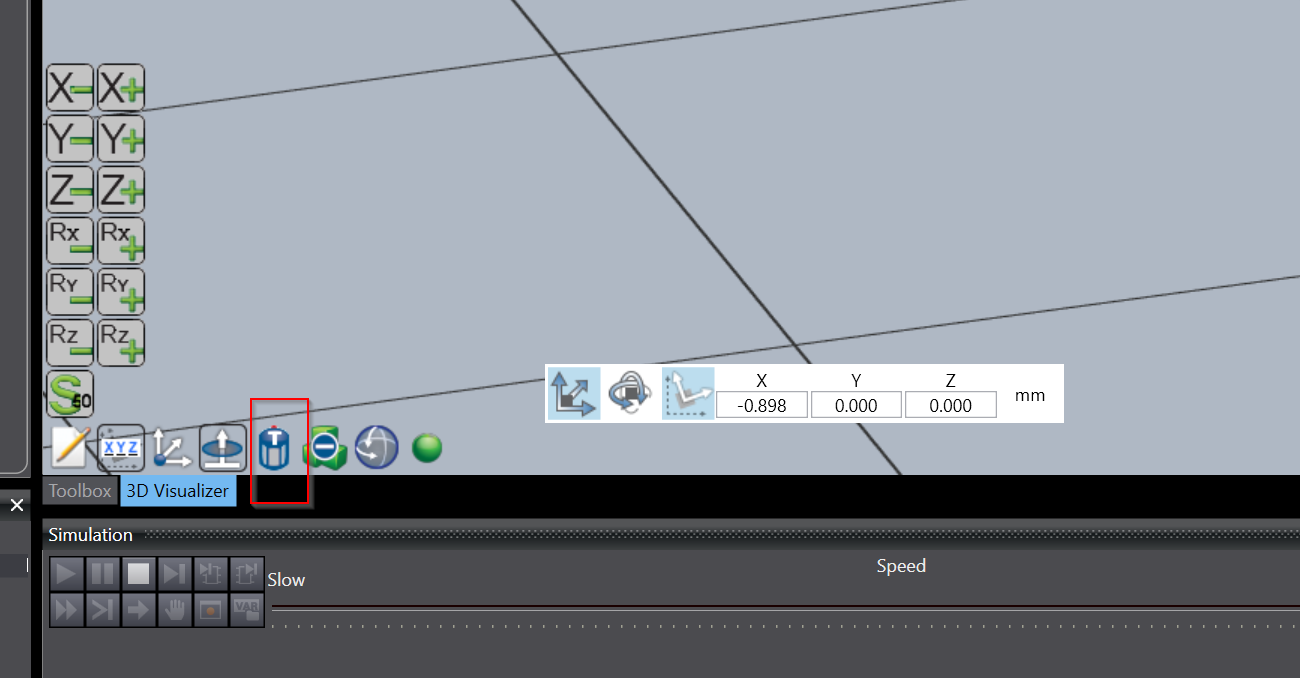
Jog パネル以外にもJ1/J2/J3/J4ボタンがありますね。実はこちらのボタンから直接ロボットの短軸を動かせます。
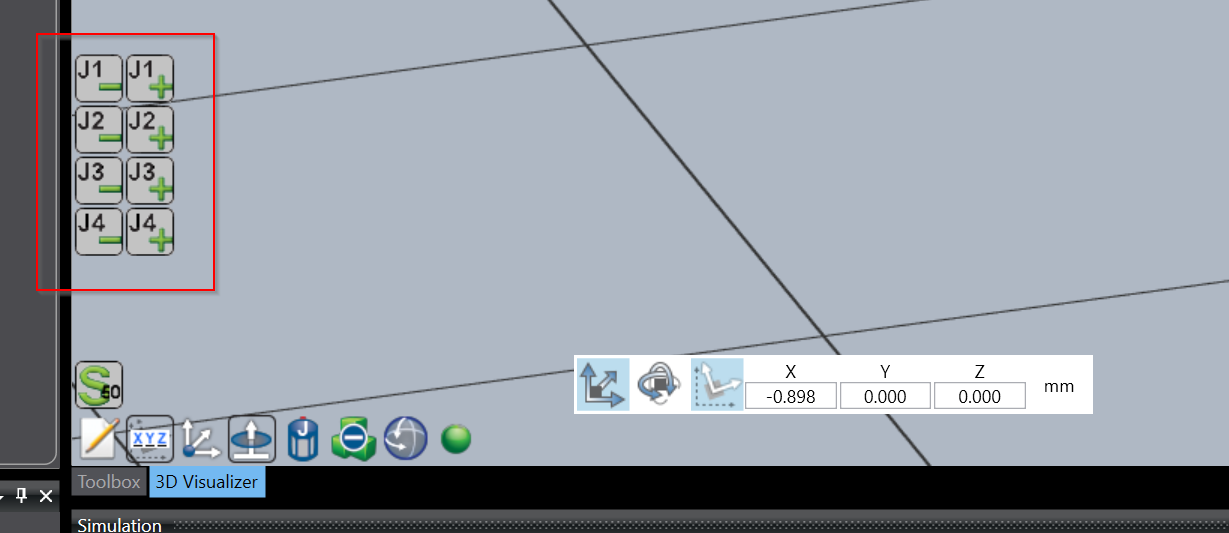
下図のような操作になります。

Teaching
今回は記事の最後でTeachingの方法を紹介します。
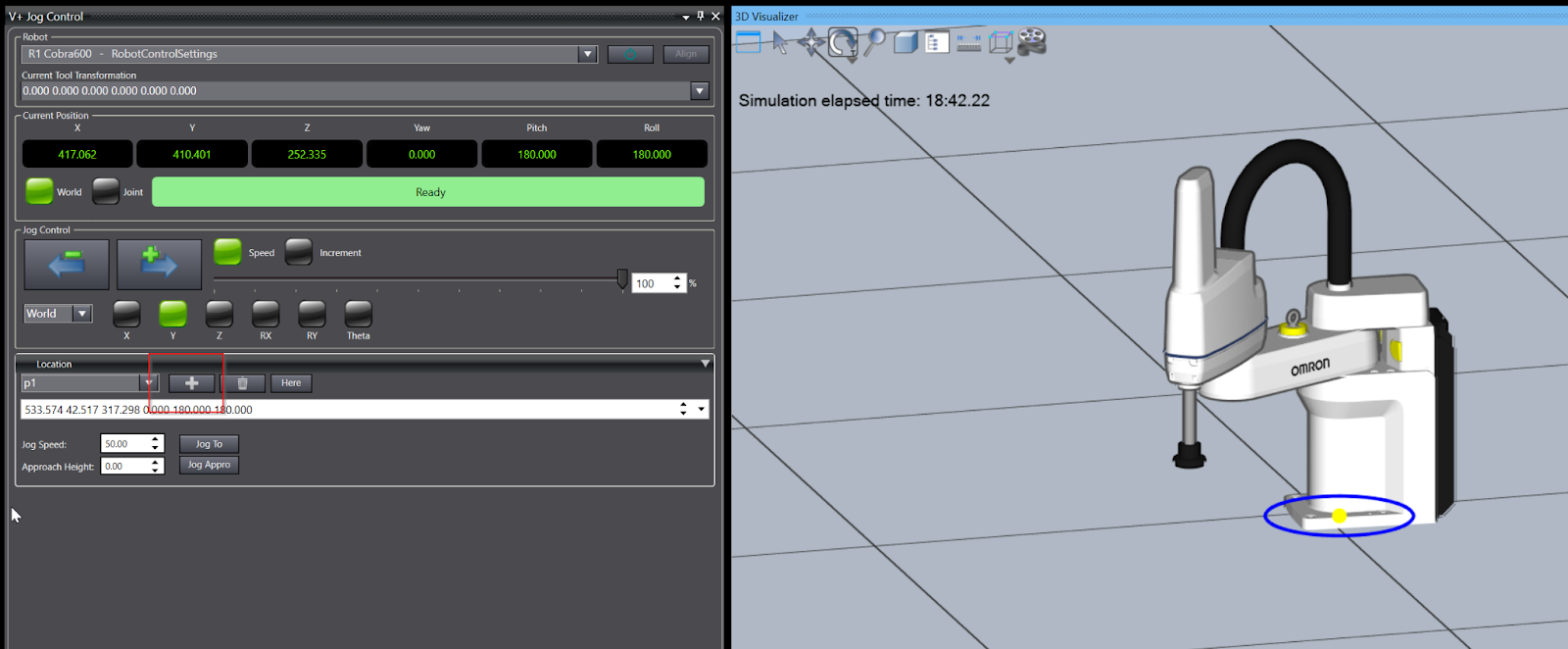
Jog Control パネルからLocationというTabがあり、このTabを展開してください。
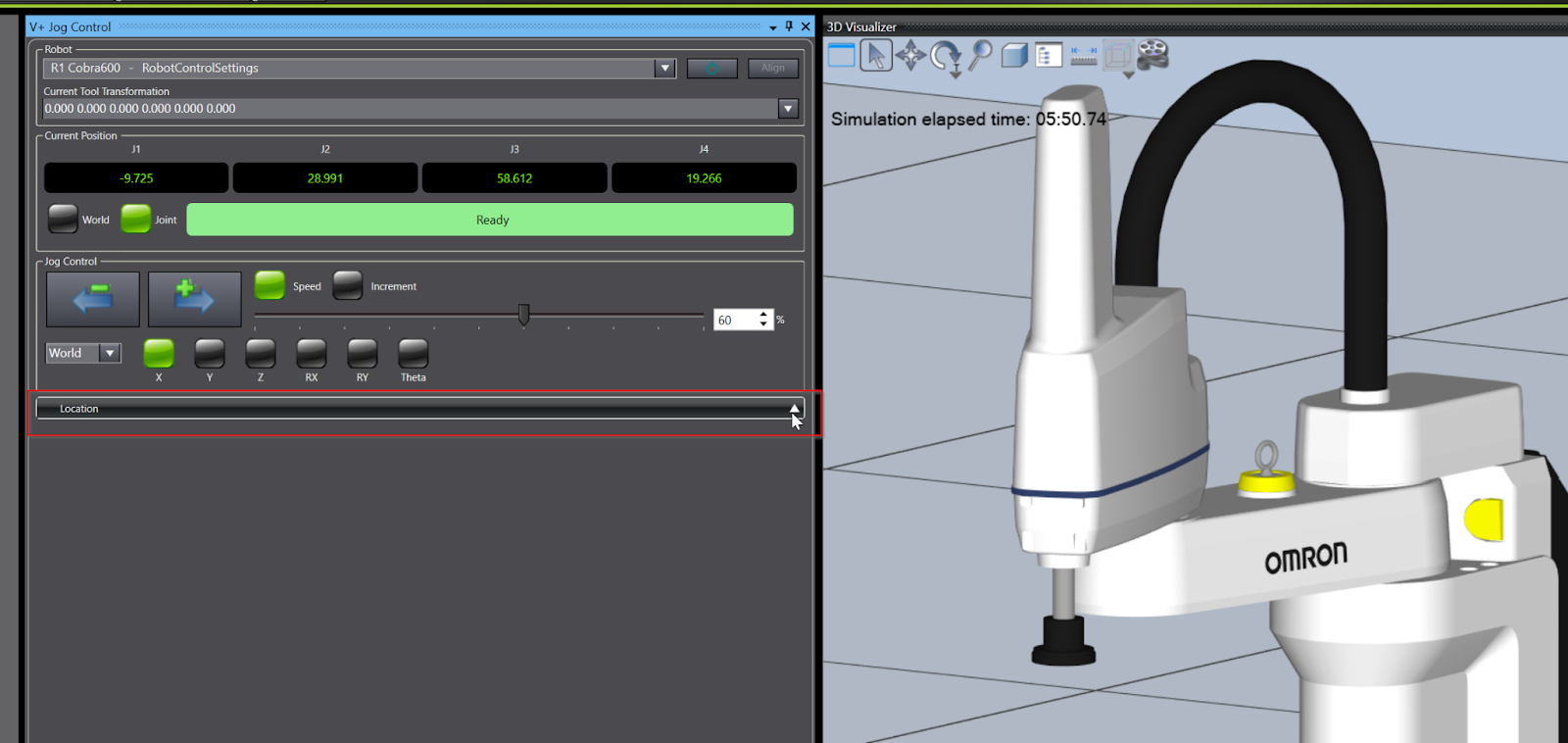
このようにTeaching用のパネルが表示されました。
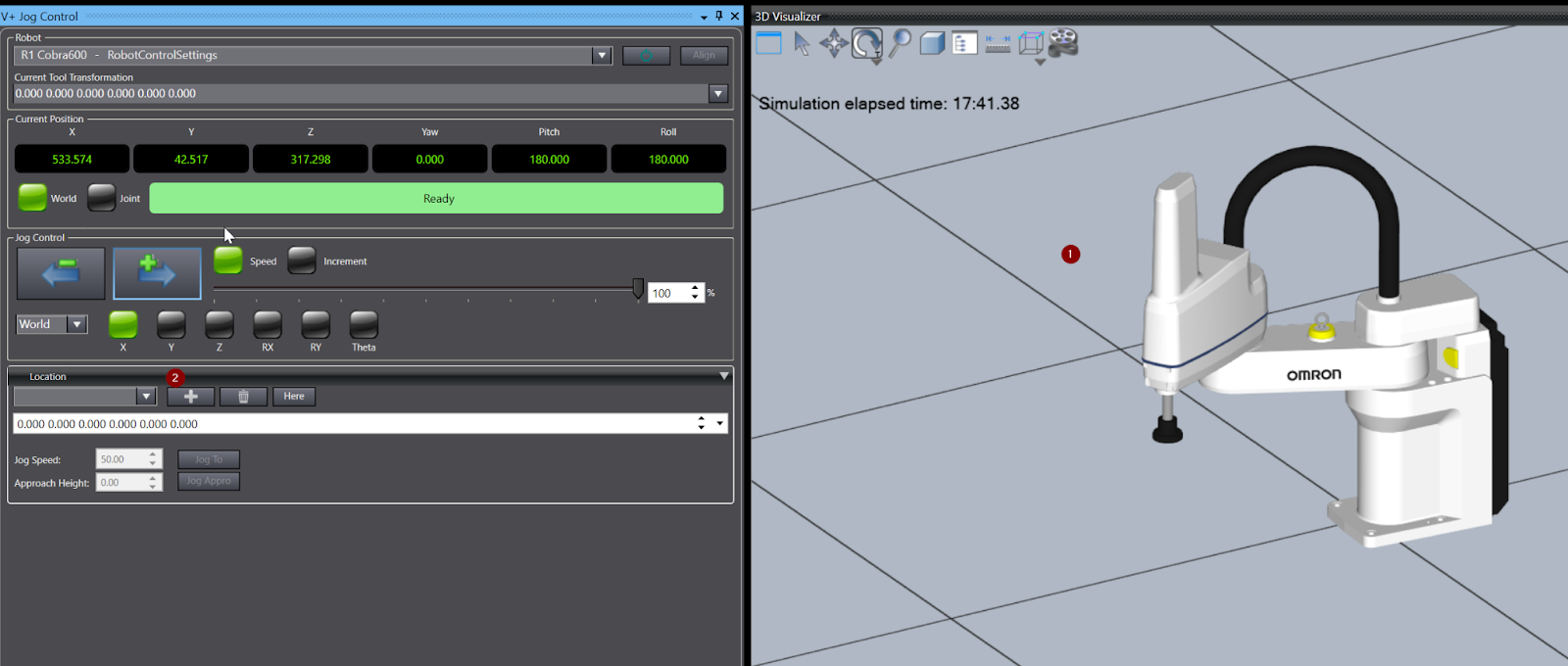
ロボットを記憶したいPositionまで移動し、+ボタンでそのPositionを記憶できます。
Add a new variableの画面が表示されます。
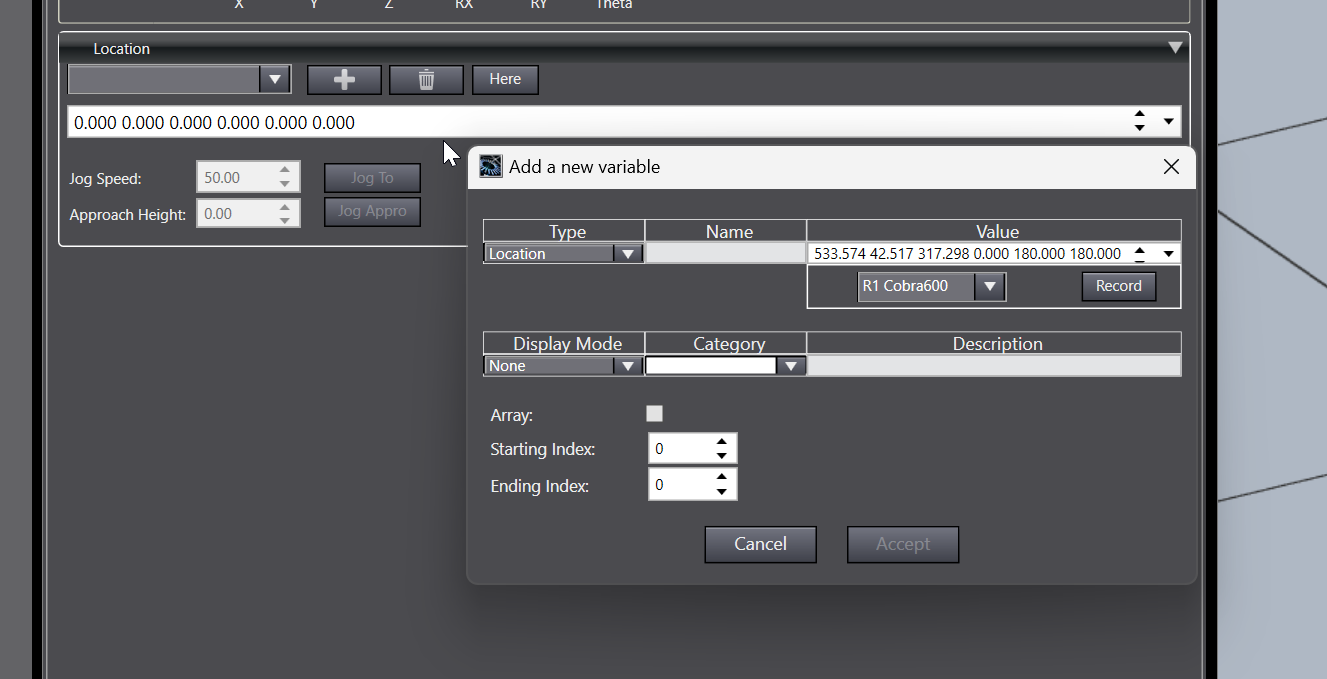
NameでPositionの名前を入力し、AcceptクリックすればPositionを記憶できます。

Teach more!
先程紹介した操作でいくつかのPositionを記憶しておきましょう。
Drop-Listからプロジェクトに保存されたPositionを選択できます。

Jog to Position
Drop-ListからPositionを設定し、”Jog To”ボタンを押してる間、ロボットが現在位置からp2に移動します。

下図のような操作です。

Jog Speed
Jog Speed項目から移動速度を調整できます。
下図のような操作です。
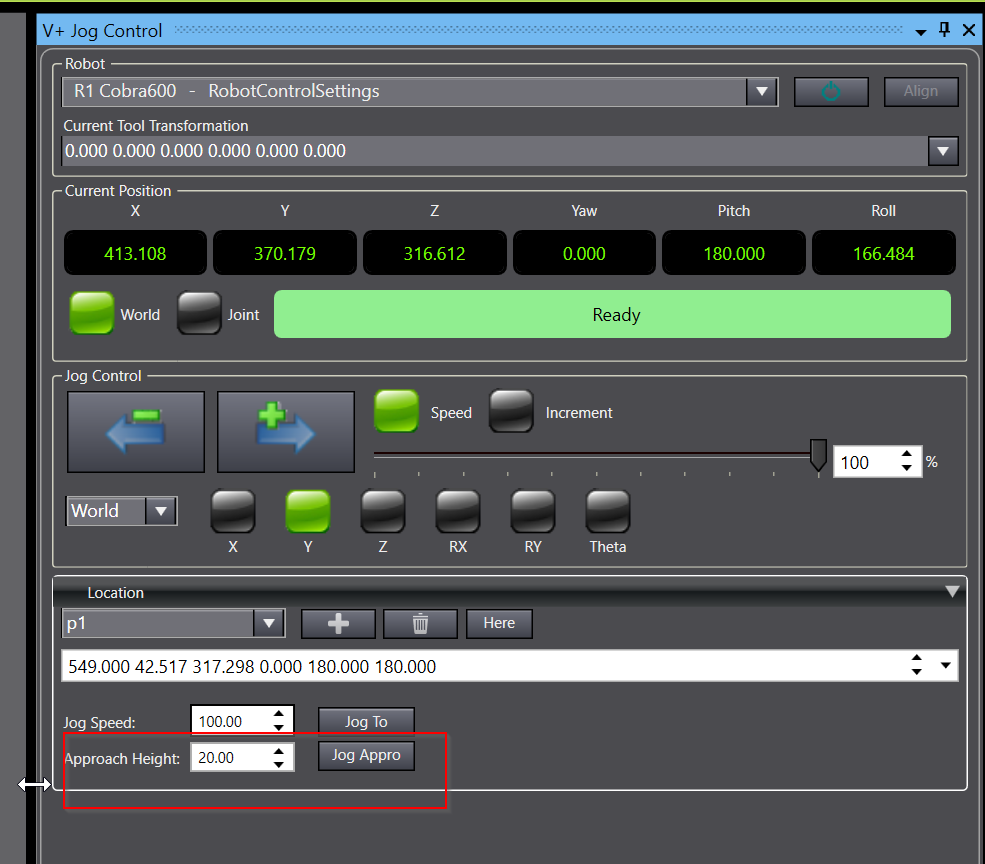
Approach Heigth
次はApproach Heightという項目を説明します。こちらはOffsetみたいな操作で、ロボットのZ値の目的値を現在選択されたPositionよりプラス・マイナスできます。
例えばいま20を設定し、JogApproボタンでロボットをp2に移動します。
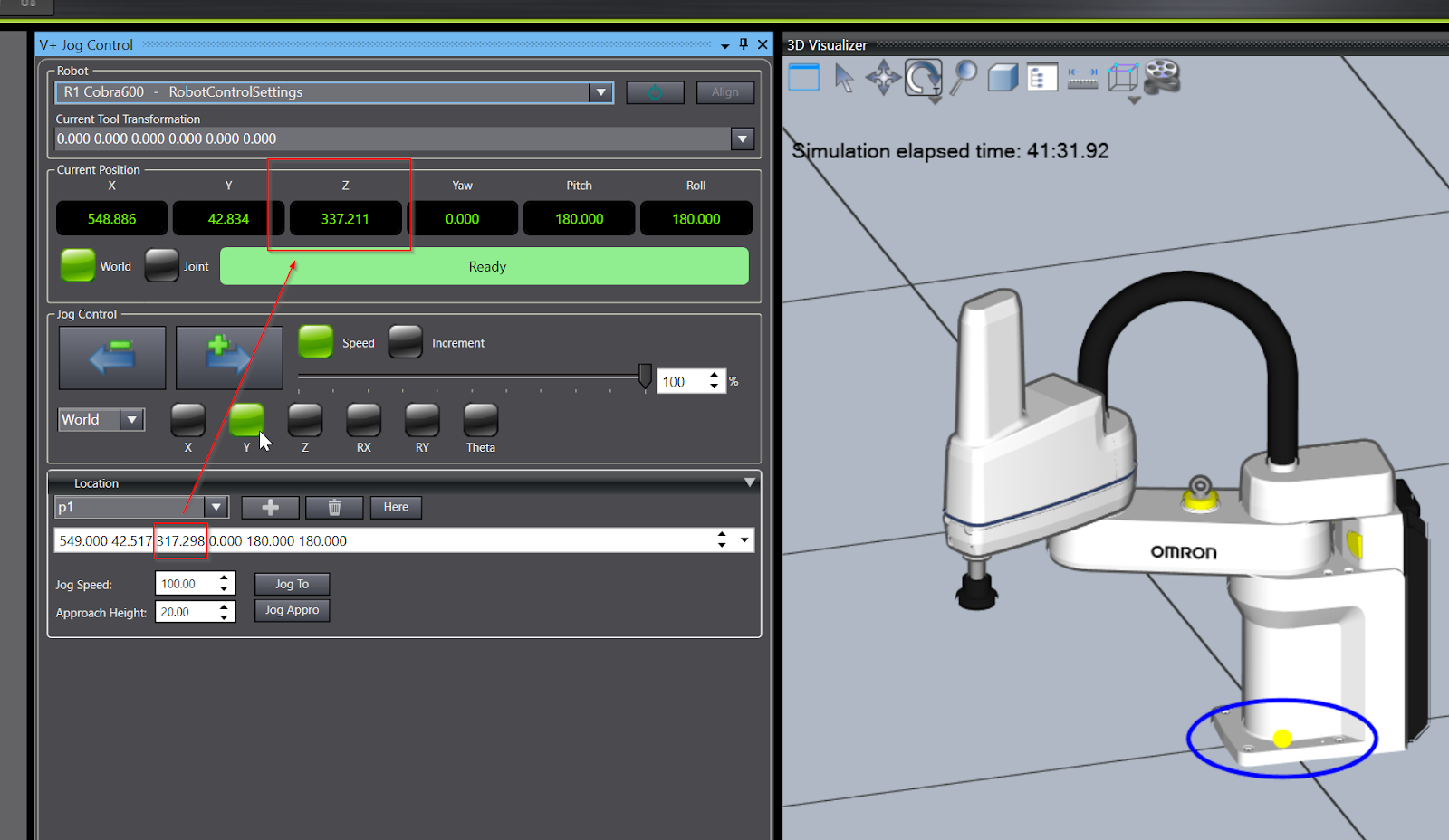
下図のような操作です。

p1のいちは317ですが、Approach Height=20、Jog Appro操作でロボットを移動しましたので、ロボットのZ値は最終的に317+20=337になります。
もちろんマイナス値もせっていできます。このようにApproach Heightを-20に設定し、最終的にロボットのZ値は317‐20=297になります。

Directly Teach
最後は3D Visualizer から実にTeach Pointというボタンがあり、このボタンから直接ロボットの位置を保存できます。

このように、現在のロボット位置を”point1”として保存します。
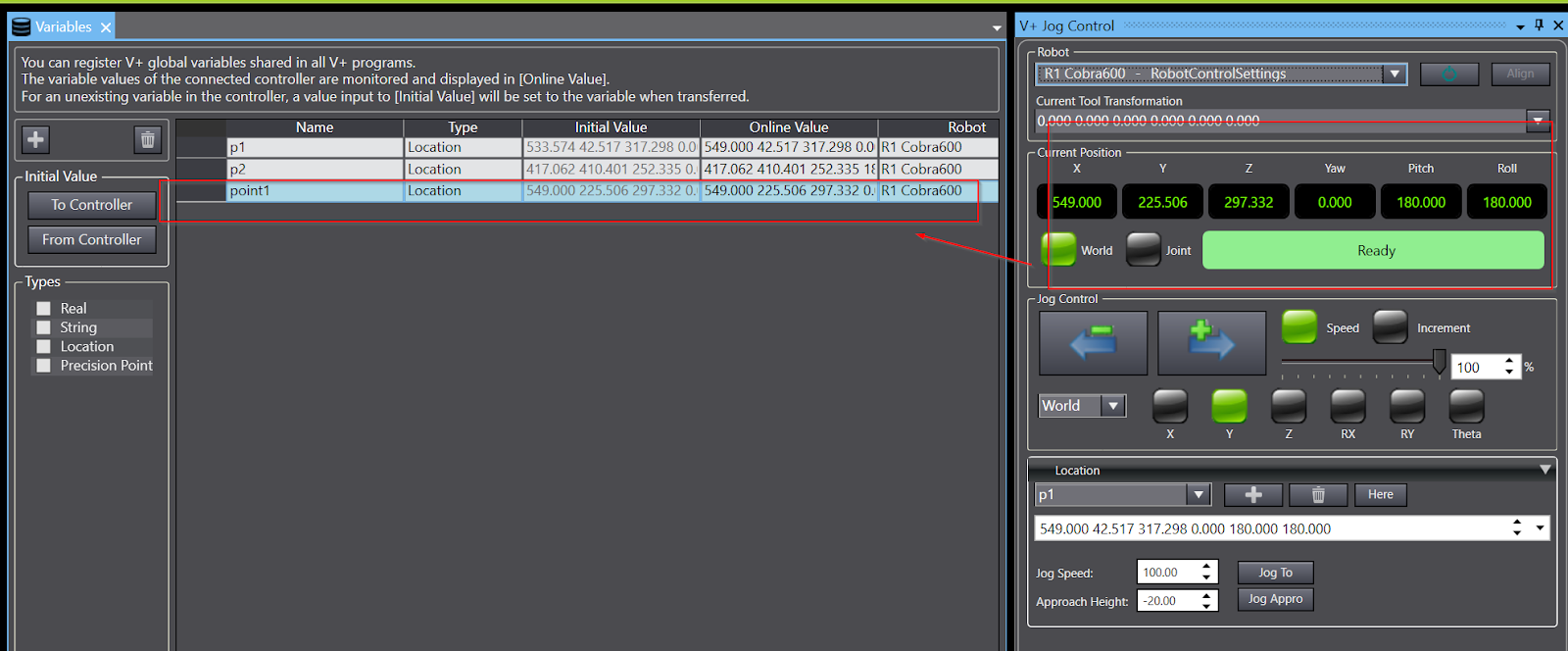
SMALL Adjustment
作業中に保存したPointを微調整したい場合は、Sysmac Stuidoからもできます。
調整したいPointには小さな矢印をクリックしてください。
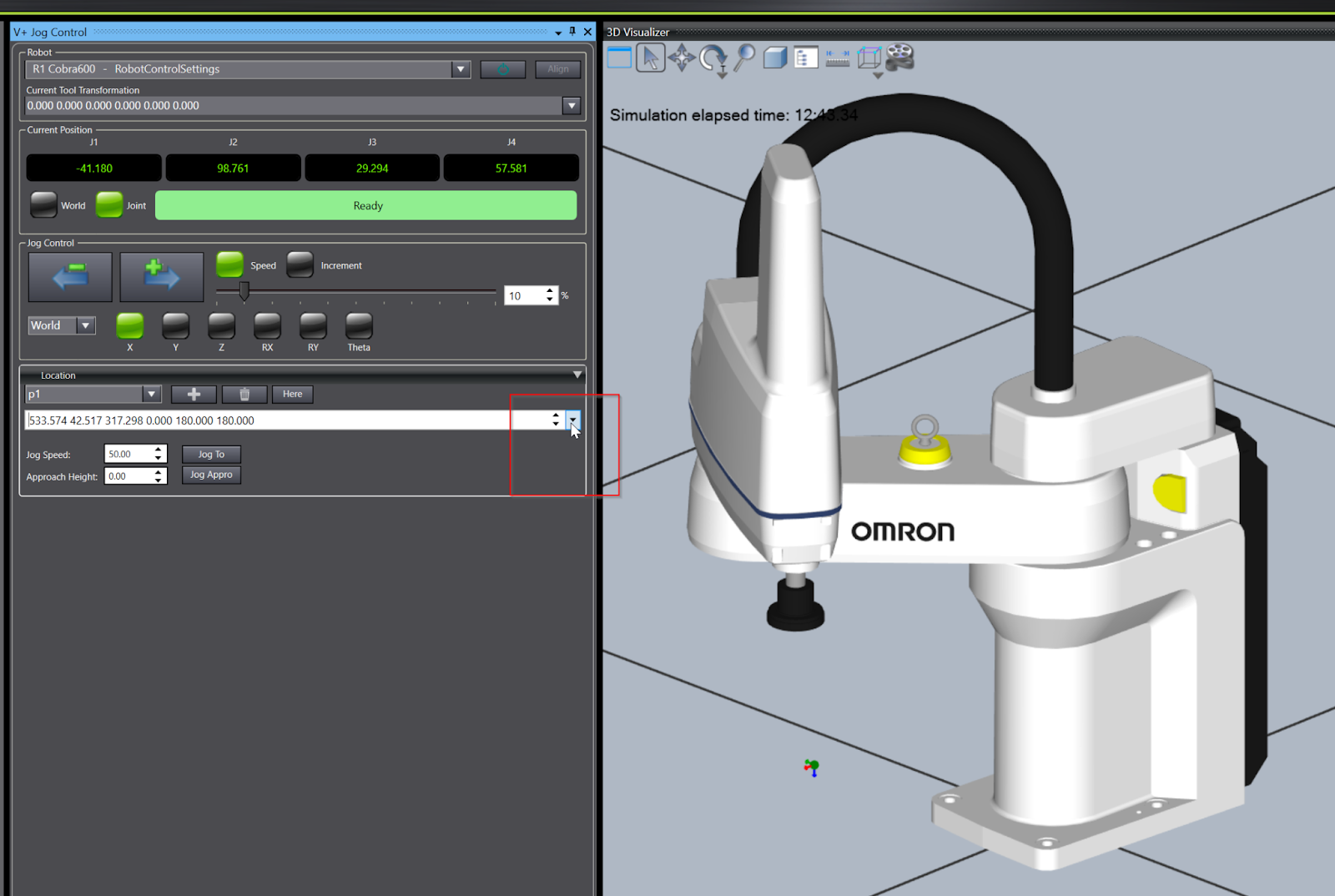
このようにPointを微調整する操作画面が表示されます。

微調整したいX/Y/Z/RX/RY/RZもクリックで設定できます。

下図のような操作になります。