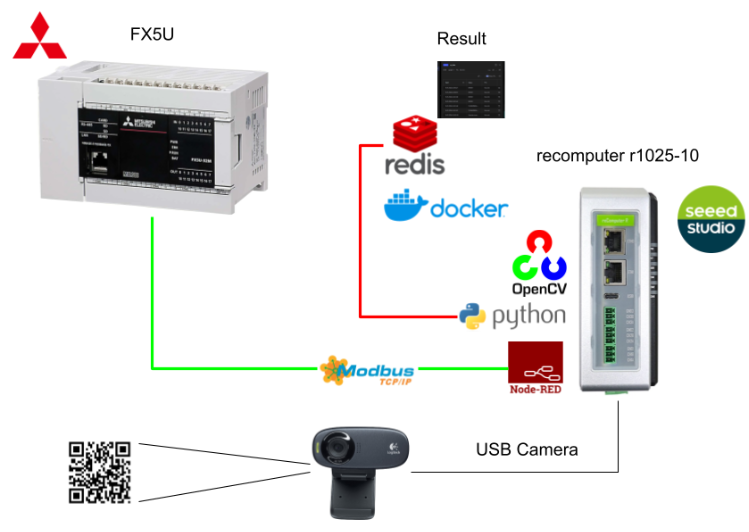
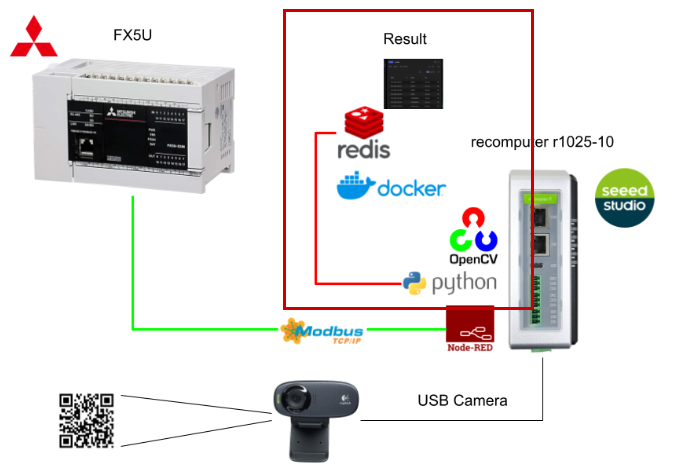
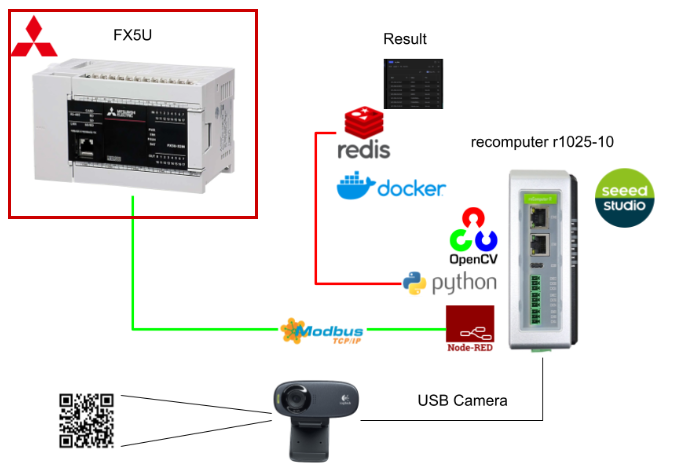
今回の記事ではUSBカメラでPythonとOpencvを使用してQR Codeを読みこみます。そしてQR Codeの結果をDocker上にあるRedis Serverに保存し、またModbus TCP経由で三菱FX5Uから撮影のトリガーとQR Codeの内容を転送するようにします。
さ、FAを楽しもう。
Reference Link
http://soup01.com/ja/category/database/redis/
前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
現在、私達の活動はほぼ無償で続けており、より多くのコンテンツを提供するためには、皆様の温かいご支援が大変重要です。もし可能であれば、以下のリンクから応援していただけると大変嬉しく思います。
高橋クリスのメンバーシップ
こちらはFullさん(full@桜 八重 (@fulhause) / X)と共にやっているラジオにメンバーシップを登録いただけます。
https://note.com/fulhause/membership/join
AMAZON ギフトリスト
こちらは自分のブログのコンテンツ制作や設備の充実に大いに役立てさせていただきます。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon
こちらは自分のブログのコンテンツ制作や設備の充実に対する小さな応援の気持ちのPatreonです。
https://www.patreon.com/user?u=84249391
皆様のサポートが、私たちの活動をより充実させる力となります。
どうぞよろしくお願いします。
メールアドレス(*=@)
X
Implementation
Python Side
最初にSeeed Stuidoのrecomputer R1025-10にPython Scriptを書きます。
Install packages
まずpipを使用しPythonパッケージをインストールします。
redis
こちらのコマンドでredis ServerにアクセスするPython Packagesをインストールします。
https://redis.io/docs/latest/develop/clients/redis-py/
| pip install redis |
こちらはredis Packageを使用しredis Serverをアクセスするサンプルコードになります。
| import redis # host=’192.168.13.159′ port=6379 decode_responses=True r=redis.Redis(host=host,port=port,decode_responses=decode_responses) hash_key=”qr_data” r.hset(hash_key,”2024-07-27-2″,”www.abc..jp1″) redis_qrhashkey=’qr_data’ |
opencv
こちらのコマンドでOpencv のPython Packagesをインストールします。
https://pypi.org/project/opencv-python/
| pip install opencv-python |
pymodbus
こちらのコマンドでModbus TCP 通信 のPython Packagesをインストールします。
https://pymodbus.readthedocs.io/en/latest/
Scripts
こちらは今回記事で作成したScriptsです。
| import cv2 import struct from pymodbus.client import ModbusTcpClient from datetime import datetime import signal import sys from time import sleep import redis def signal_handler(sig, frame): print(‘You pressed Ctrl+C!’) client.close() print(“Client is closed..”) sys.exit(0) def capture_photo_from_webcam(save_path): cap = cv2.VideoCapture(0) if not cap.isOpened(): print(“Cannot open camera”) return ret,frame=cap.read() if not ret: print(“Cannot grab frame”) else: cv2.imwrite(save_path, frame) print(f”Image saved as {save_path}”) cap.release() server_ip=”127.0.0.1″ server_port=11502redis_host=’192.168.13.159’redis_port=6379redis_decode_responses=Trueredis_qrhashkey=’qr_data’ client = ModbusTcpClient(server_ip, port=server_port) r=redis.Redis(host=redis_host,port=redis_port,decode_responses=redis_decode_responses) triggered=False register_backup=0 register=0 registers = [] zero_data = [0] * 99 signal.signal(signal.SIGINT, signal_handler) if client.connect(): while True: sleep(0.05) result=client.read_holding_registers(200,1) now=datetime.now() dt_string = now.strftime(“%d-%m-%Y-%H-%M-%S”) image_path=(‘/home/recomputer/Pictures/captured_’+dt_string+’_image.png’) if not result.isError(): print(“Register:”,result.registers[0]) register=result.registers[0] if result.registers[0] != register_backup: register_backup=result.registers[0] if result.registers[0] ==1: triggered=True print(“triggerred..”) response = client.write_registers(1,[2]) else: print(“Error..”) response = client.write_registers(1,[90]) if triggered: client.write_registers(2, zero_data) print(“—Reset all registers..—“) capture_photo_from_webcam(image_path) print(“–Capature..–“) now=datetime.now() print(“–Read Images..–“) image = cv2.imread(image_path) detector = cv2.QRCodeDetector() data, vertices_array, _ = detector.detectAndDecode(image) if vertices_array is not None: print(data) response = client.write_registers(1,[3]) else: data=”ERROR” response = client.write_registers(1,[91]) registers=[] r.hset(redis_qrhashkey,dt_string,data) byte_data = data.encode(‘ascii’) for i in range(0, len(byte_data), 2): two_bytes = byte_data[i:i+2] if len(two_bytes) == 1: two_bytes += b’\x00′ registers.append(struct.unpack(‘>H’, two_bytes)[0]) response = client.write_registers(2, registers) print(“—-“) triggered=False client.close() print(“Disconnect..”) |
Import librarys
最初はOpencv・Modbus・Redisなど必要なライブラリをImportします。
| import cv2import structfrom pymodbus.client import ModbusTcpClientfrom datetime import datetimeimport signalimport sysfrom time import sleepimport redis |
Handle Ctrl+C
こちらはTerminalでCtrlx+Cを押したときの処理になります。
| def signal_handler(sig, frame): print(‘You pressed Ctrl+C!’) client.close() print(“Client is closed..”) sys.exit(0) |
Capture WebCam Frame
こちらはOpencvライブラリを使用しWebカメラをトリガーし、写真を撮影するプログラムです。
| def capture_photo_from_webcam(save_path): cap = cv2.VideoCapture(0) if not cap.isOpened(): print(“Cannot open camera”) return ret,frame=cap.read() if not ret: print(“Cannot grab frame”) else: cv2.imwrite(save_path, frame) print(f”Image saved as {save_path}”) cap.release() |
Configure ModbusTCP/redis Server Connection
こちらはModbus TCP Serverとredis Data Serverの接続設定になります。
| server_ip=”127.0.0.1″server_port=11502redis_host=’192.168.13.159’redis_port=6379redis_decode_responses=Trueredis_qrhashkey=’qr_data’ client = ModbusTcpClient(server_ip, port=server_port)r=redis.Redis(host=redis_host,port=redis_port,decode_responses=redis_decode_responses) |
Init the variables
Modbus TCP Serverに読み書きするレジスタを初期化します。
| triggered=False register_backup=0 register=0 registers = [] zero_data = [0] * 99 signal.signal(signal.SIGINT, signal_handler) |
Read Holding Registers
Modbus TCP Serverに接続成功した場合、Modbus TCP ServerにHolding レジスタ値を取得します。
| if client.connect(): while True: sleep(0.05) result=client.read_holding_registers(200,1) now=datetime.now() dt_string = now.strftime(“%d-%m-%Y-%H-%M-%S”) |
Configure Path
画像の保存先を生成します。
| image_path=(‘/home/recomputer/Pictures/captured_’+dt_string+’_image.png’) |
Get Data via Modbus Result if OK
Modbus TCP Serverのレジスタ読み成功の場合、該当するレジスタ=1なら写真の撮影動作をトリガーします。
| if not result.isError(): print(“Register:”,result.registers[0]) register=result.registers[0] if result.registers[0] != register_backup: register_backup=result.registers[0] if result.registers[0] ==1: triggered=True print(“triggerred..”) response = client.write_registers(1,[2]) else: print(“Error..”) response = client.write_registers(1,[90]) |
Trigger the capture method
capture_photo_from_webcamのMethodを実行し写真を撮影し、QRCodeDetectorでQR Codeを取り出します。
| if triggered: client.write_registers(2, zero_data) print(“—Reset all registers..—“) capture_photo_from_webcam(image_path) print(“–Capature..–“) now=datetime.now() dt_string = now.strftime(“%d/%m/%Y %H:%M:%S”) print(“–Read Images..–“) image = cv2.imread(image_path) detector = cv2.QRCodeDetector() data, vertices_array, _ = detector.detectAndDecode(image) |
Transfer the Result via modbus
QR Codeの読み結果をModbus TCP Serverに書き込みます。
| if vertices_array is not None: print(data) response = client.write_registers(1,[3]) else: data=”ERROR” response = client.write_registers(1,[91]) r.hset(redis_qrhashkey,dt_string,data) registers=[] byte_data = data.encode(‘ascii’) for i in range(0, len(byte_data), 2): two_bytes = byte_data[i:i+2] if len(two_bytes) == 1: two_bytes += b‘\x00’ registers.append(struct.unpack(‘>H’, two_bytes)[0]) response = client.write_registers(2, registers) print(“—-“) triggered=False |
Close the connection
最後はModbus TCP 接続を切断します。
| client.close() print(“Disconnect..”) |
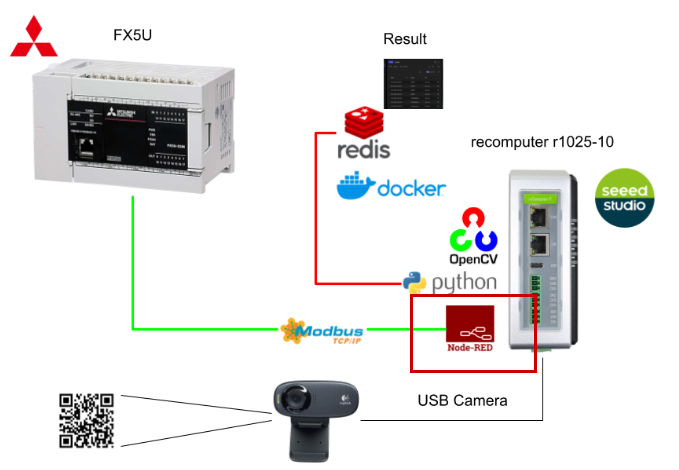
Node-Red Side
次はSeeed Stuidoのrecomputer R1025-10にNode-RedのFlowを構築します。
Install Node
今回Node-redで使用するのはnode-red-contrib-modbus ノードです。
https://flows.nodered.org/node/node-red-contrib-modbus
node-red-contrib-modbusがインストール完了したら”Modbus”のノードが追加されます。
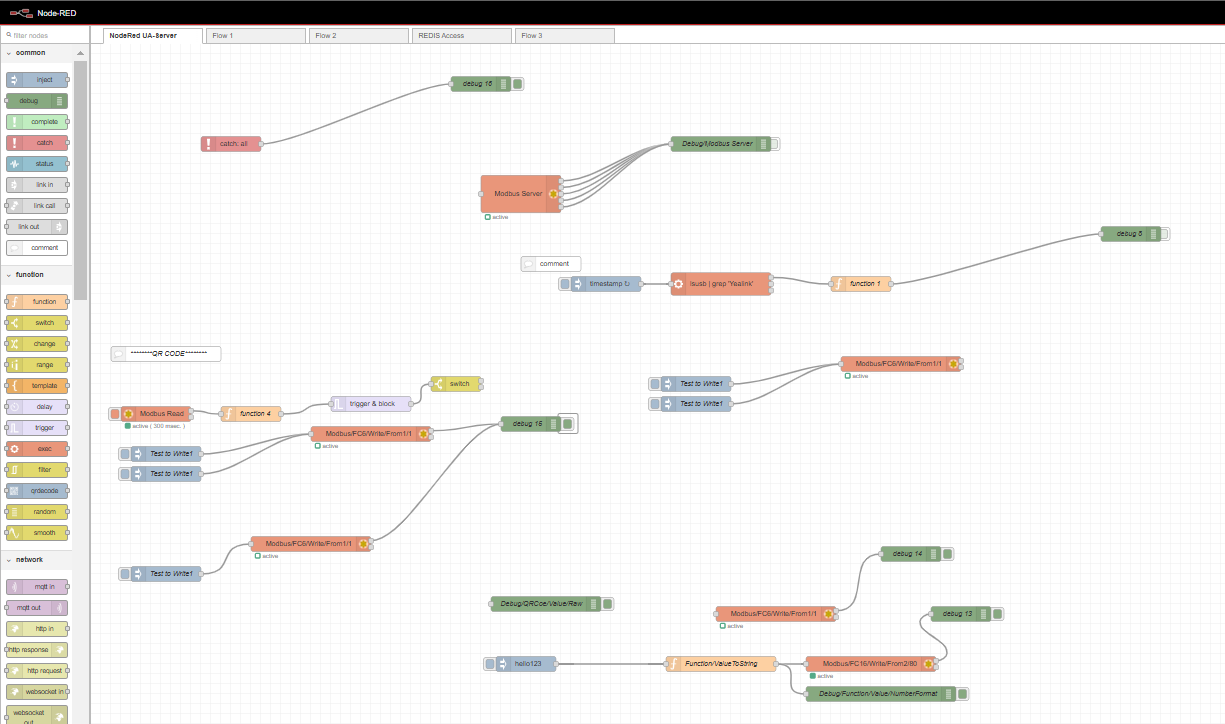
Flow
こちらは今回記事で使用したFlowです。
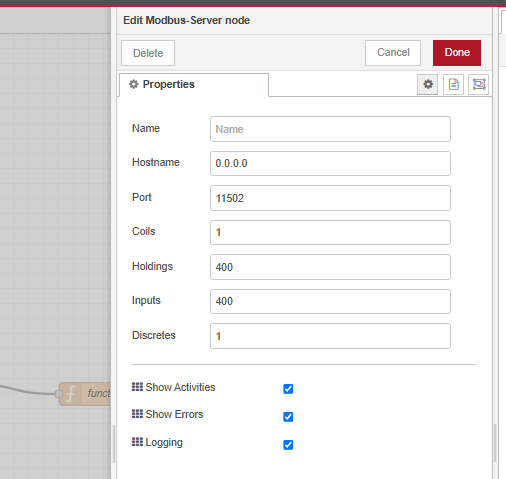
Modbus Server
Modbus Server NodeをFlowに追加し、Node-Red内にModbus Serverを立ち上げます。
Hostname=0.0.0.0に設定し、Host IPを使用します。
Portはアプリケーションに合わせて設定してください。
また、Coil/Holdings/Inputs/Discretes のレジスタ数を設定していきましょう。
Check USB Camera
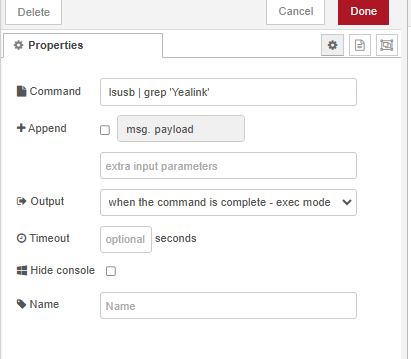
次はSystem commandをFlowに追加し、USBカメラがインストールされているかをCheckしていきましょう。

lsusb コマンドでUSB Driverを検索し、grepコマンドで’Yealink’をFilter出します。
(今回記事で使用したカメラはYealink製なので、実際エッジデバイスにインストールしてるUSB Cameraに合わせてください。)
| lsusb | grep ‘Yealink’ |
Mels FX5 Side
最後は三菱のFX5U側でModbus TCP Server接続の設定を行います。
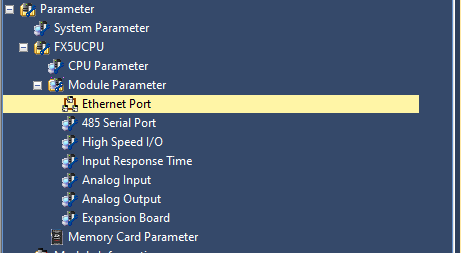
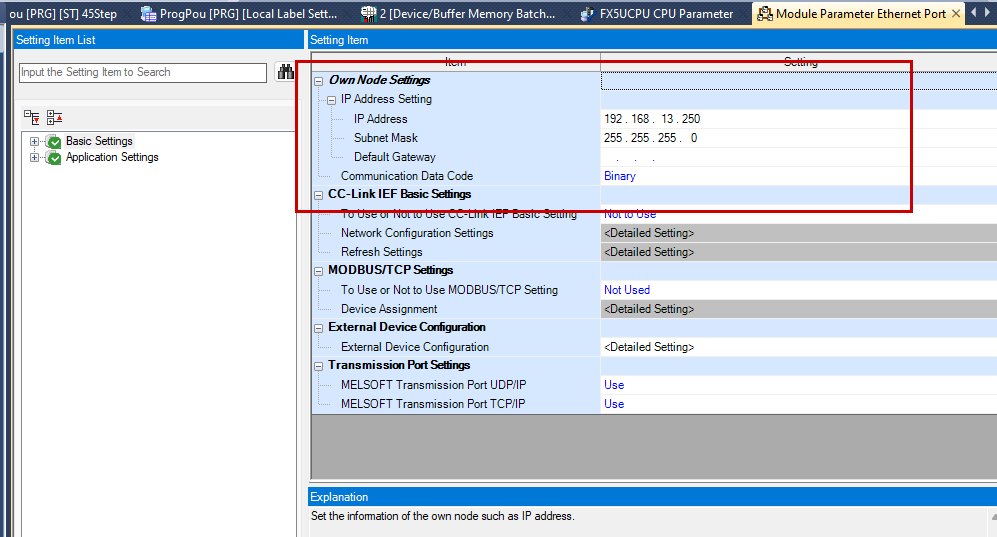
Ethernet Setting
GXWORKS3を起動し、Module Parameter>Ethernet Portをクリックします。
IP Address
FX5U本体のIPアドレスを設定します。
Simple CPU Communication Setting
次はSimple CPU Communication Settingをクリックし、Modbus TCP接続の設定を行います。
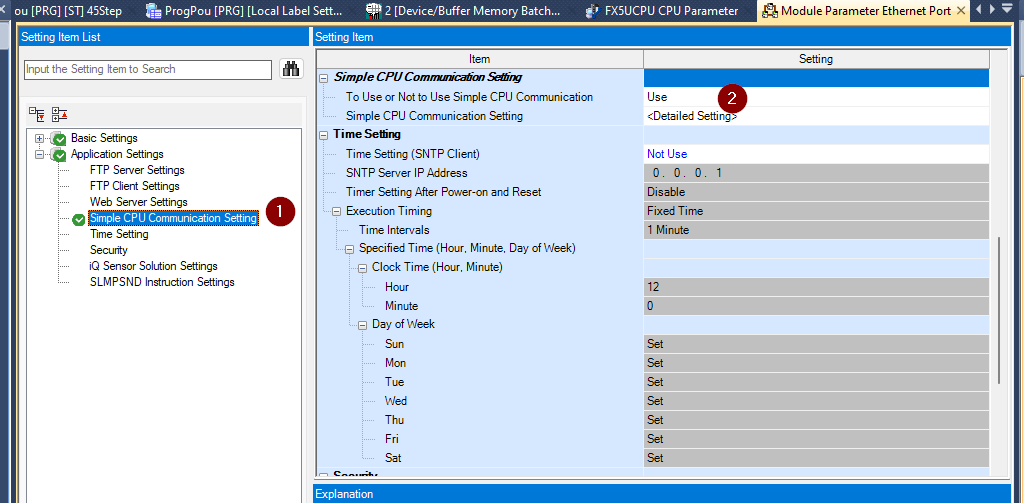
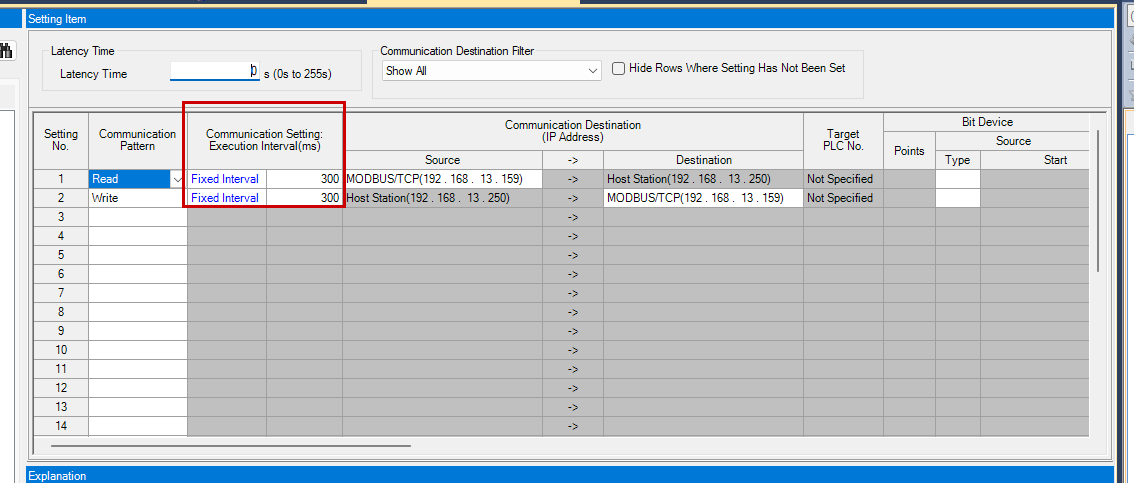
こちらはSimple CPU Communicationの設定画面です。
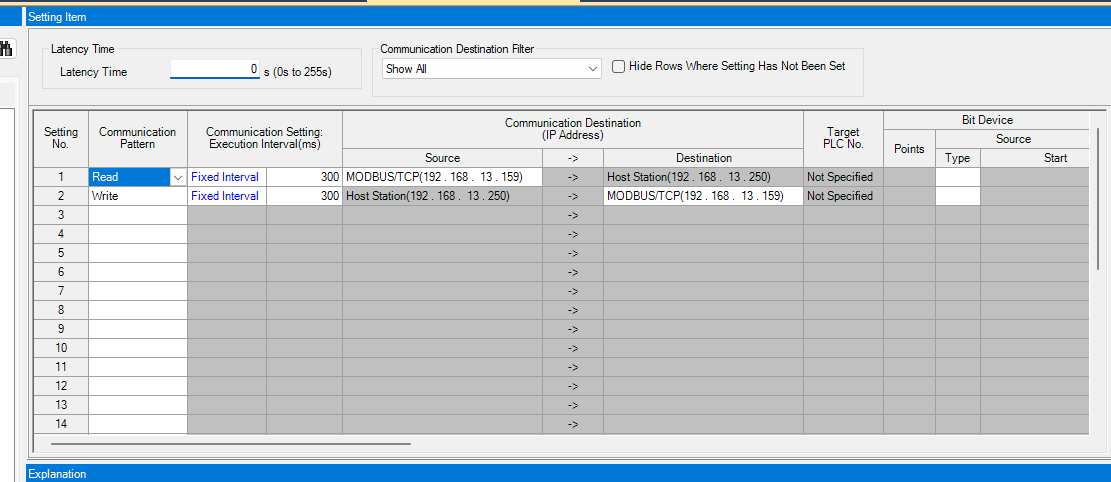
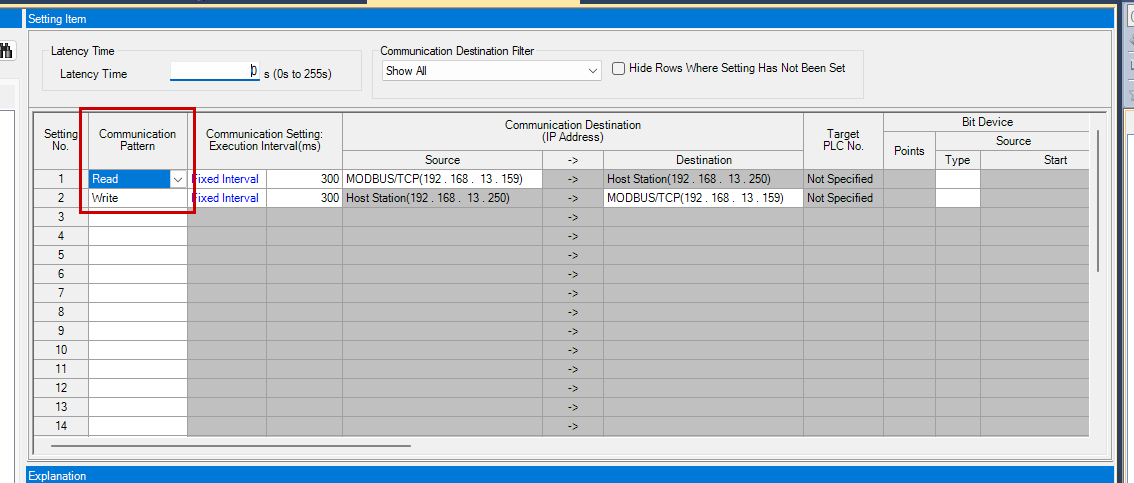
Communication Pattern
Communication PatternはRead/Write1つずつを追加します。
Communication Setting
Communication Settingを”Fixed Interval”に設定し、定周期でModbus TCP Serverをアクセスします。
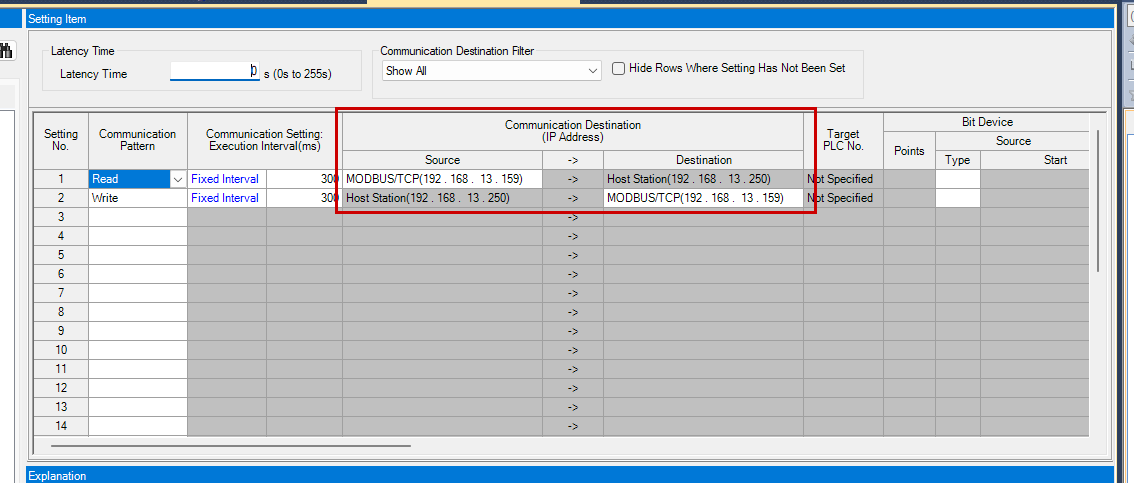
IP Address
IP Address欄ではModbus TCP ServerのIPになります。
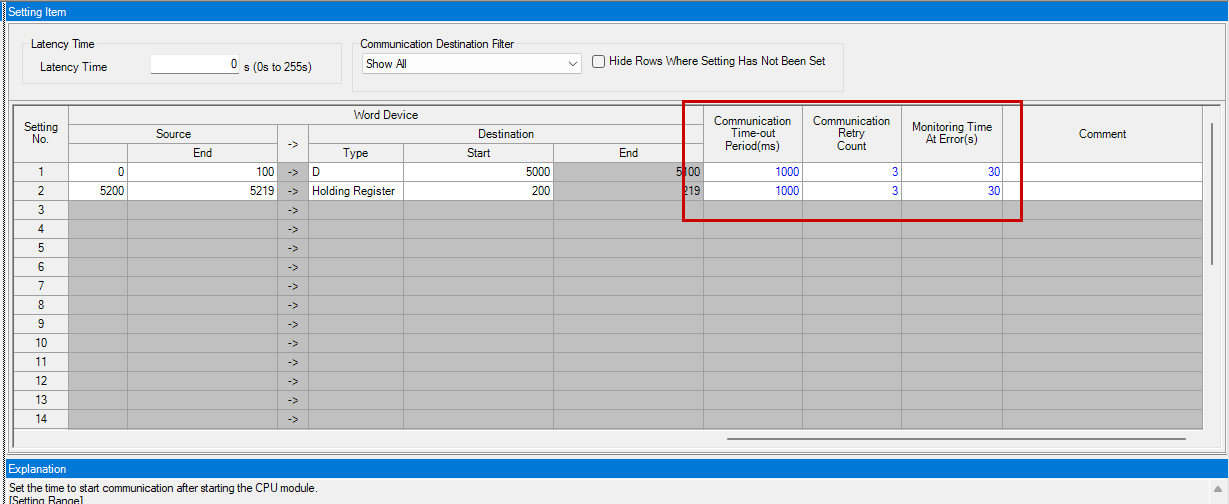
Holding Register Setting
次はHolding Register設定を行います。
TypeをHolding Registerに設定します。
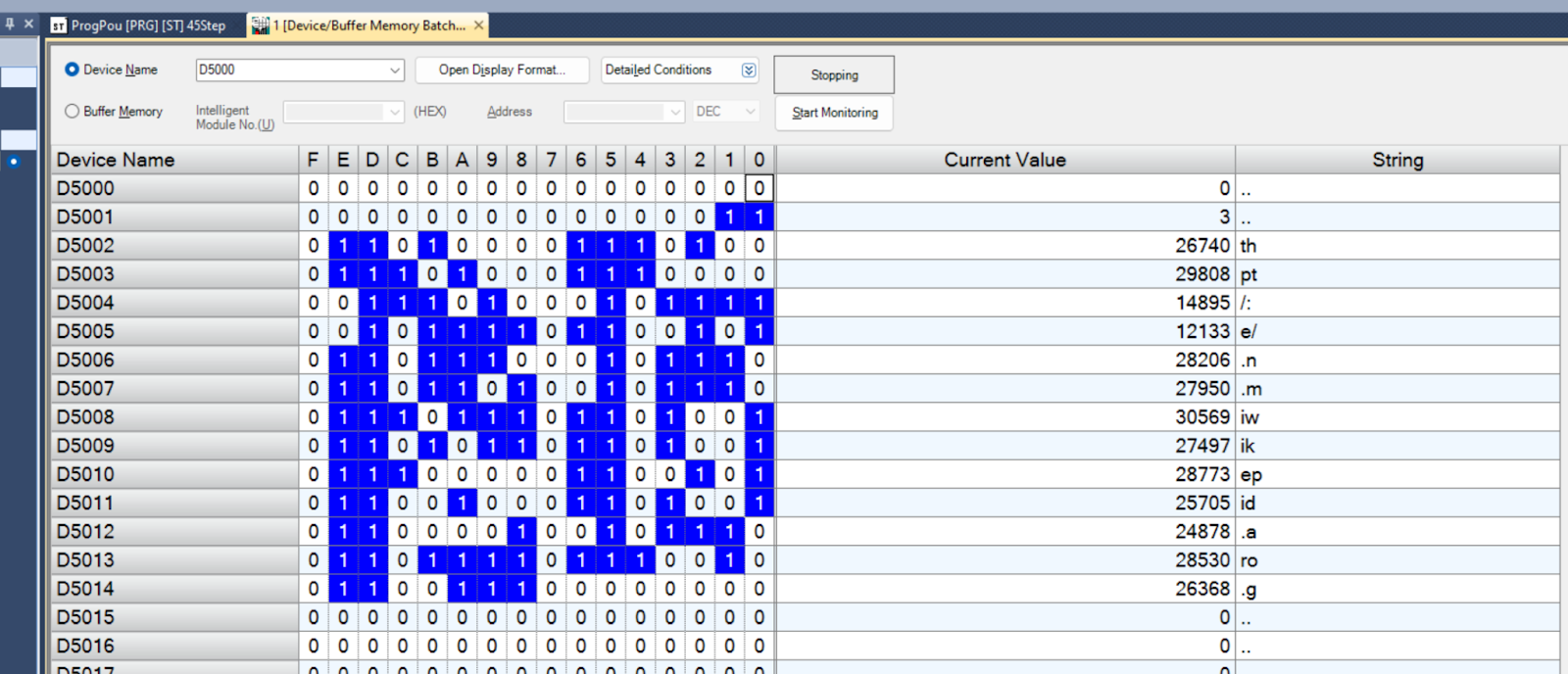
Read=D5000から101個のHolding Register(0-100)を読み込みます。
Write=D5200から20個のHolding Registerを(200-219)書き込みます。

Communication Timeout Setting
通信エラー設定はネットワーク負荷に合わせて設定しましょう。
Save
最後はCommunication Settingを保存します。

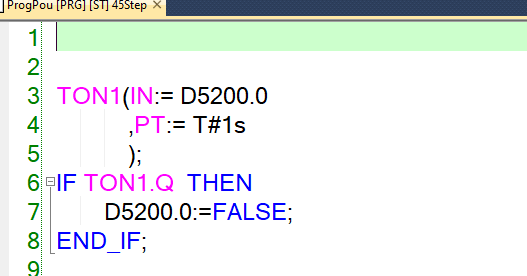
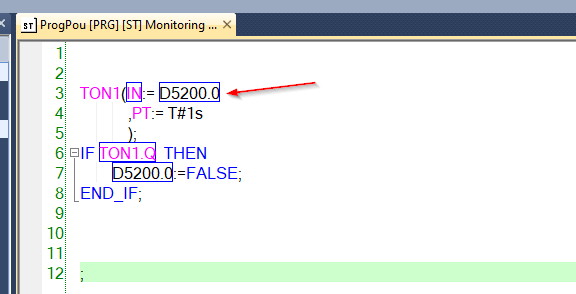
Program
FX5Uに簡単なプログラムを作成し、カメラをTriggerしたら1秒後にリセットするようにします。
Result
このようにQR Codeを画面に移します。

三菱側でカメラの撮影トリガーをONします。
recomputer R1025-10に撮影した写真が保存できました。

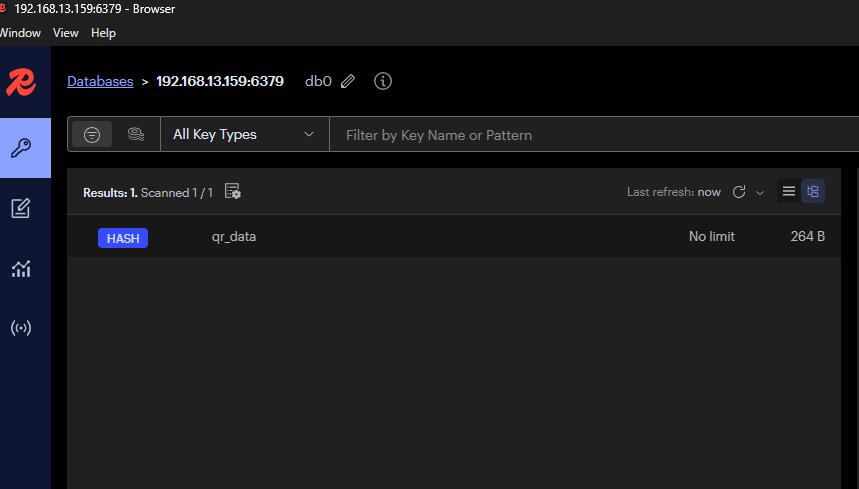
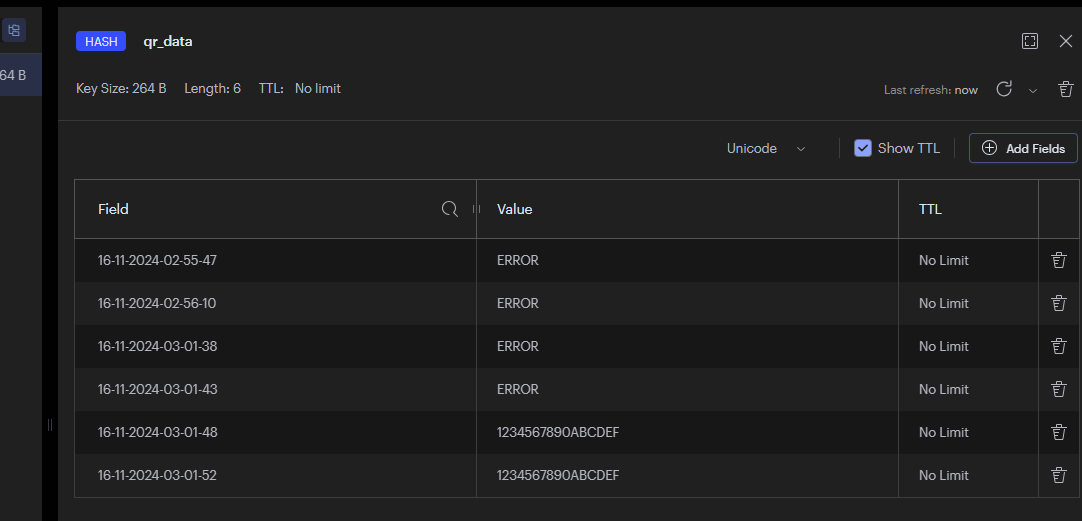
Redis InsightツールからQR Codeの結果が保存されたことも確認できました。
もちろん、FX5UのDメモリにもQR Code結果が格納されています。