こちらは新しいシリーズでFATEKのSC シリーズSERVOを使用し様々な記事を展開していきます。第4話はBeckhoff TwinCAT3とEtherCAT経由で仮想軸とMC_GearInを使用し、同期制御を行います。
さ、FAを楽しもう。

Reference Link
http://soup01.com/ja/category/fatek/sc-series/
MC_GearIn
機能ブロックMC_GearInは、直線的なマスタースレーブ結合(歯車結合)を有効にします。このFBは、分子/分母形式で固定された歯車比を受け入れます。
注意するのはスレーブ軸は停止時のみ、マスター軸と連結できます。このFBでは、移動中のマスター軸への同期は不可能で、その場合はMC_GearInVeloまたはMC_GearInPosを使用してください。
そして、スレーブ軸は機能ブロックMC_GearOutでデカップリングできます。スレーブが移動中にデカップリングされた場合、その速度を維持し、MC_StopまたはMC_Haltを使用して停止させることができます。
あるいは、動的に変更可能なギア比を備えた機能ブロックMC_GearInDynが利用可能です。
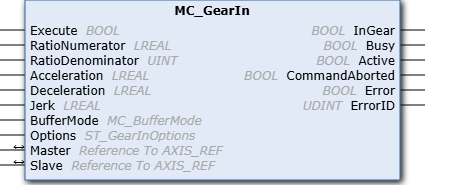
VAR_INPUT
| 変数名 | データ・タイプ | 説明 |
| Execute | BOOL | 立ち上がりエッジでコマンドが実行されます。 |
| RatioNumerator | LREAL | ギア比の分子。分母が 1 の場合、分子に浮動小数点値としてギア比を直接指定することもできます。 |
| RatioDenominator | UINT | ギア比の分母。 |
| Acceleration | LREAL | 加速(≧0)未実装。 |
| Deceleration | LREAL | 減速(≧0)未実装。 |
| Jerk | LREAL | ジャーク(≧0)未実装。 |
| BufferMode | MC_BufferMode | 未実装 |
| Options | ST_GearInOptions | 未実装 |
VAR_IN_OUT
| 変数名 | データ・タイプ | 説明 |
| Master | AXIS_REF | マスター軸の構造体。 |
| Slave | AXIS_REF | スレーブ軸の構造体。 |
VAR_OUTPUT
| 変数名 | データ・タイプ | 説明 |
| InGear | BOOL | カップリング(ギア結合)が正常に完了した場合に TRUE。 |
| Busy | BOOL | 「Execute」によりコマンドが開始されてから、処理中の TRUEです。Busy が FALSE の場合、このFBは次の指令を受け付け可能です。同時に、「InGear」「CommandAborted」「Error」のいずれか一つがセットされます。 |
| Active | BOOL | コマンドが実行中であることを示します。(現在は Active = Busy) |
| CommandAborted | BOOL | コマンドが完全に実行できなかった場合に TRUE。同時コマンド実行などにより、結合処理中に軸がデカップル(切り離し)された可能性があります。 |
| Error | BOOL | エラーが発生した場合に TRUE。 |
| ErrorID | UDINT | Error 出力が TRUE の場合、そのエラー番号を示します。 |
MC_GearOut
FB MC_GearOutは、マスタースレーブ結合を無効にします。
注意するのは、スレーブ軸が動作中に切り離された場合、軸は自動的に停止せず、一定の速度に達すると無限に動きになり、その場合はMC_Halt または MC_Stop ファンクションブロックで軸を停止できます。
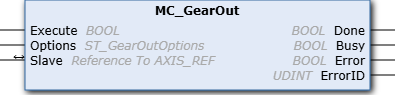
VAR_INPUT
| 変数名 | データ・タイプ | 説明 |
| Execute | BOOL | 立ち上がりエッジでコマンドが実行されます。 |
| Options | ST_GearOutOptions | 現在は未実装。 |
VAR_IN_OUT
| 変数名 | データ・タイプ | 説明 |
| Slave | AXIS_REF | スレーブ軸の構造体。 |
VAR_OUTPUT
| 変数名 | データ・タイプ | 説明 |
| Done | BOOL | 軸のデカップル(ギア解除)が正常に完了した場合に TRUE。 |
| Busy | BOOL | コマンド開始後、処理中の間 TRUE。Busy が FALSE の場合、このファンクションブロックは新しい指令を受け付け可能であり、同時に「Done」または「Error」のいずれかがセットされます。 |
| Error | BOOL | エラーが発生した場合に TRUE。 |
| ErrorID | UDINT | Error 出力が TRUE の場合、そのエラー番号を示します。 |
Implementation
こちらは今回の構成です。Part2と同じハードウェア構成ですが、TwinCAT3 Runtime上で1つの仮想軸を追加していきます。

eSystem
eSystem という ENUM(列挙型) を定義し、軸の数を固定します。
| {attribute ‘qualified_only’} {attribute ‘strict’} {attribute ‘to_string’} TYPE eSystem : ( TotalAxis := 1 ); END_TYPE |
GVL
GVLにAXIS_REFを格納する配列を定義し、上限が eSystem.TotalAxis で決めます。
| {attribute ‘qualified_only’} VAR_GLOBAL arrAxis :ARRAY[0..eSystem.TotalAxis]OF AXIS_REF; END_VAR |
プログラム
次はFatekのSC3 Servoを動かすためのプログラムを作成します。こちらはPLC OPEN モーションのFBをします。それはBeckhoff TwinCAT3に標準実装されています。
VAR
この変数定義は、PLCopen Motion の各種FBを軸数に依存しない形で一括管理するためのものです。
eSystem.TotalAxis を基準に、
- 各軸の Power / Reset / Home / Move などの制御FB
- 移動指令や原点復帰などの 軸別操作フラグ
- 位置・速度といった 軸別パラメータ
をすべて配列として定義しています。
これにより、軸数が増減してもENUM 定義を変更するだけでプログラム全体が追従し、
可読性と拡張性を両立した多軸サーボ制御が可能になります。
また、GearIn / GearOut はマスター・スレーブの1組を扱うため単体FBとして管理し、
同期制御と個別軸制御を明確に分離しています。
| PROGRAM pServo VAR MC_Power:ARRAY[0..eSystem.TotalAxis] OF MC_Power; MC_Reset:ARRAY[0..eSystem.TotalAxis] OF MC_Reset; MC_SetPosition:ARRAY[0..eSystem.TotalAxis] OF MC_SetPosition; MC_Home:ARRAY[0..eSystem.TotalAxis] OF MC_Home; MC_ReadActualPosition:ARRAY[0..eSystem.TotalAxis] OF MC_ReadActualPosition; MC_ReadActualVelocity:ARRAY[0..eSystem.TotalAxis] OF MC_ReadActualVelocity; MC_ReadAxisError:ARRAY[0..eSystem.TotalAxis] OF MC_ReadAxisError; MC_ReadStatus:ARRAY[0..eSystem.TotalAxis] OF MC_ReadStatus; MC_MoveAbsolute:ARRAY[0..eSystem.TotalAxis] OF MC_MoveAbsolute; MC_MoveRelative:ARRAY[0..eSystem.TotalAxis] OF MC_MoveRelative; MC_GearIn :MC_GearIn; MC_GearOut :MC_GearOut; END_VAR VAR xEnable :BOOL; xEnabled :BOOL; xReset :BOOL; iCounter :INT; arrxMoveRelative ,arrxMoveAbsolute ,arrxHome ,arrxSetPosition :ARRAY[0..eSystem.TotalAxis]OF BOOL; arrMoveAbosolutePos ,arrMoveAbosoluteVel ,arrMoveRelativePos ,arrMoveRelativeVel :ARRAY[0..eSystem.TotalAxis]OF LREAL; xMC_GearinExe ,xMC_GearinOK ,xMC_GearinActive ,xMC_GearinError :BOOL; xMC_GearOutExe ,xMC_GearOutOK ,xMC_GearOutActive ,xMC_GearOutError :BOOL; END_VAR |
Program
このプログラムは、複数軸のサーボを FOR ループで一括制御するためのものです。eSystem.TotalAxis を基準に、すべての軸に対して同じ処理を順番に行うことで、軸数が増減してもコードを大きく書き換えずに対応できる構成になっています。
また、ループ外では、
- 全軸の Enable 状態からシステム全体の有効状態を判定
- Master / Slave を指定した GearIn による同期制御
- GearOut による同期解除
を行い、個別軸制御と同期制御を分離しています。
| FOR iCounter:=0 TO eSystem.TotalAxis DO IF arrMoveAbosoluteVel[iCounter] <= 0.0 THEN arrMoveAbosoluteVel[iCounter] :=100.0; END_IF IF arrMoveRelativeVel[iCounter] <= 0.0 THEN arrMoveRelativeVel[iCounter] :=100.0; END_IF MC_Power[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Enable:=xEnable ,Enable_Positive:=TRUE ,Enable_Negative:=TRUE ); MC_Home[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Execute:=arrxHome[iCounter] ); IF MC_Home[iCounter].Busy THEN arrxHome[iCounter]:=FALSE; END_IF; MC_SetPosition[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Execute:=arrxSetPosition[iCounter] ,Position:=0.0 ); MC_Reset[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Execute:=xReset ); MC_ReadActualPosition[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Enable:=TRUE ); MC_ReadActualVelocity[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Enable:=TRUE ); MC_ReadAxisError[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Enable:=TRUE ); MC_ReadStatus[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Enable:=TRUE ); MC_MoveAbsolute[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Execute:=arrxMoveAbsolute[iCounter] ,Position:=arrMoveAbosolutePos[iCounter] ,Velocity:=arrMoveAbosoluteVel[iCounter] ,Acceleration:=100.0 ,Deceleration:=100.0 ,Jerk:=10.0 ); IF MC_MoveAbsolute[iCounter].Busy THEN arrxMoveAbsolute[iCounter]:=FALSE; END_IF; MC_MoveRelative[iCounter]( Axis:=GVL.arrAxis[iCounter] ,Execute:=arrxMoveRelative[iCounter] ,Distance:=arrMoveRelativePos[iCounter] ,Velocity:=arrMoveRelativeVel[iCounter] ,Acceleration:=100.0 ,Deceleration:=100.0 ,Jerk:=10.0 ); IF MC_MoveRelative[iCounter].Busy THEN arrxMoveRelative[iCounter]:=FALSE; END_IF; END_FOR; xEnabled:=MC_ReadStatus[0].Enable AND MC_ReadStatus[1].Enable; MC_GearIn( Master:=GVL.arrAxis[1] ,Slave:=GVL.arrAxis[0] ,Execute:=xMC_GearinExe ,RatioDenominator:=1 ,RatioNumerator:=1 ,Acceleration:=100.0 ,Deceleration:=100.0 ,Jerk:=10.0 ,InGear=>xMC_GearinOK ,Error=>xMC_GearinError ,Active=>xMC_GearinActive ,Error=>xMC_GearinError ); MC_GearOut( Slave:=GVL.arrAxis[0] ,Execute:=xMC_GearOutExe ); |
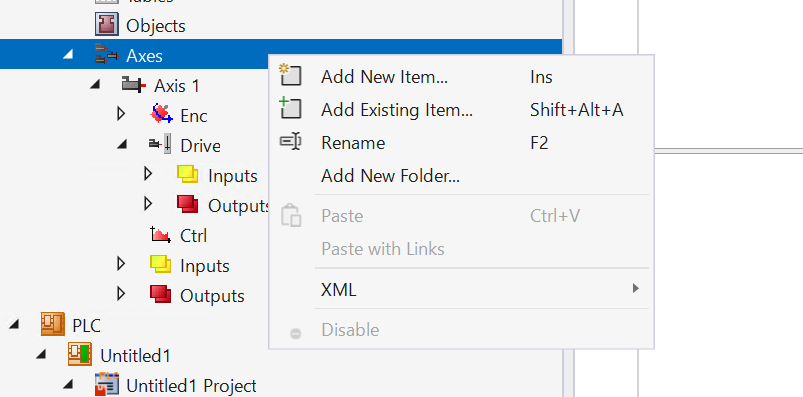
仮想軸の追加
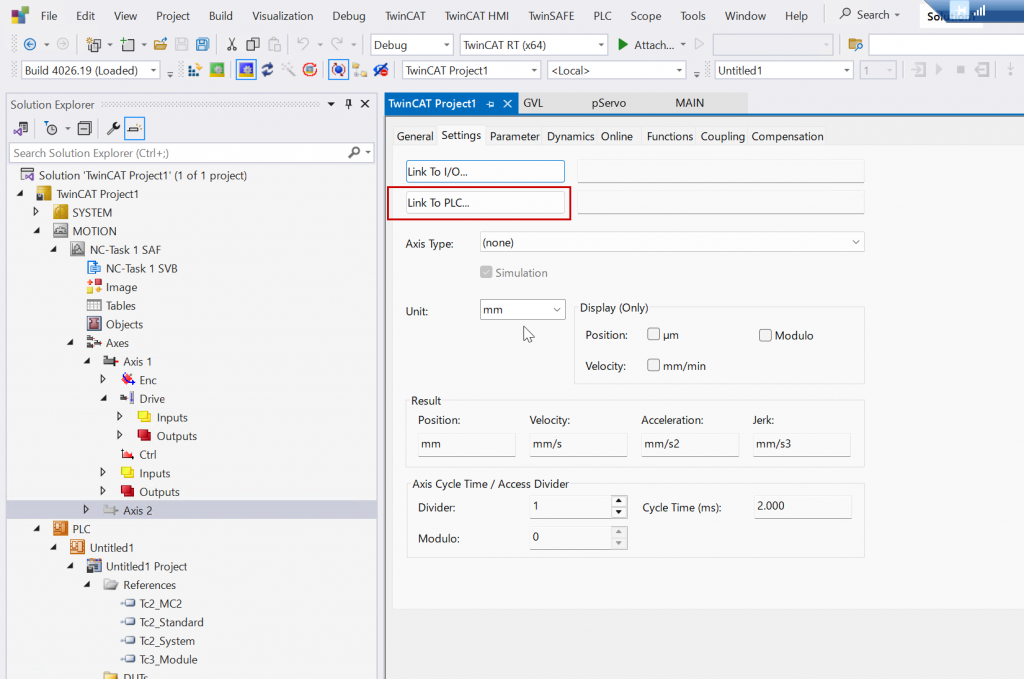
Objects ツリー内の Axes を右クリックし、「Add New Item…」 を選択することで、新しい軸を追加できます。
「Insert NC Axis」ダイアログで軸名を設定し→OKで進みます。
Link To PLCをクリックします。
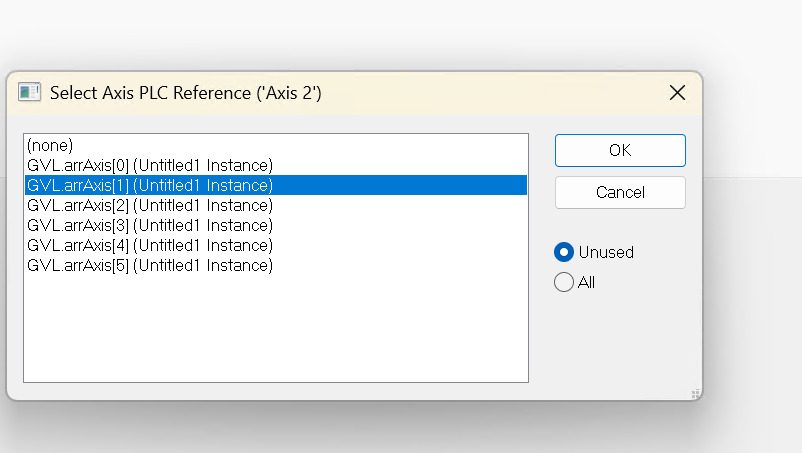
GVLで定義したAXIS_REFとLinkしてください。
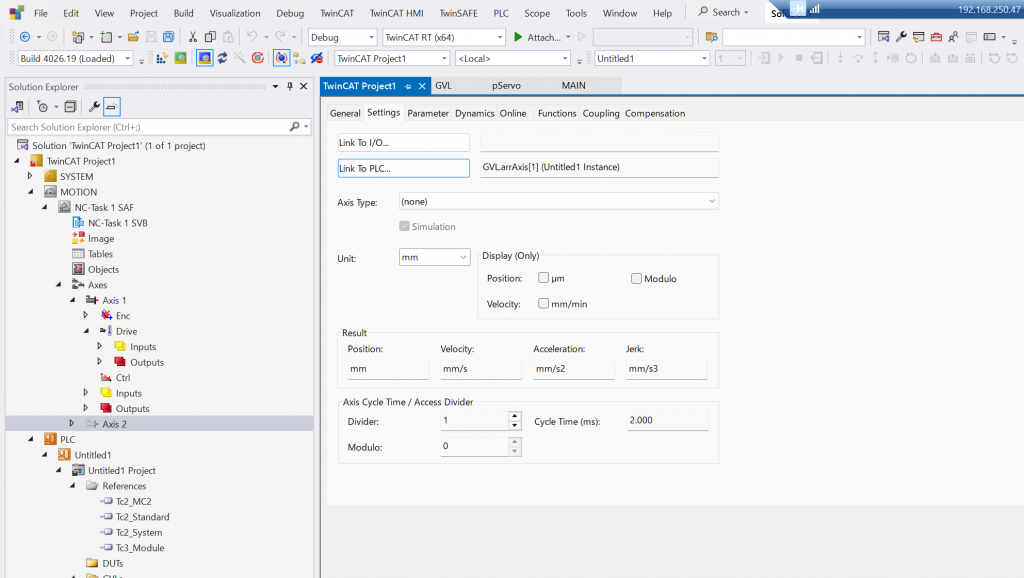
これでOKです。
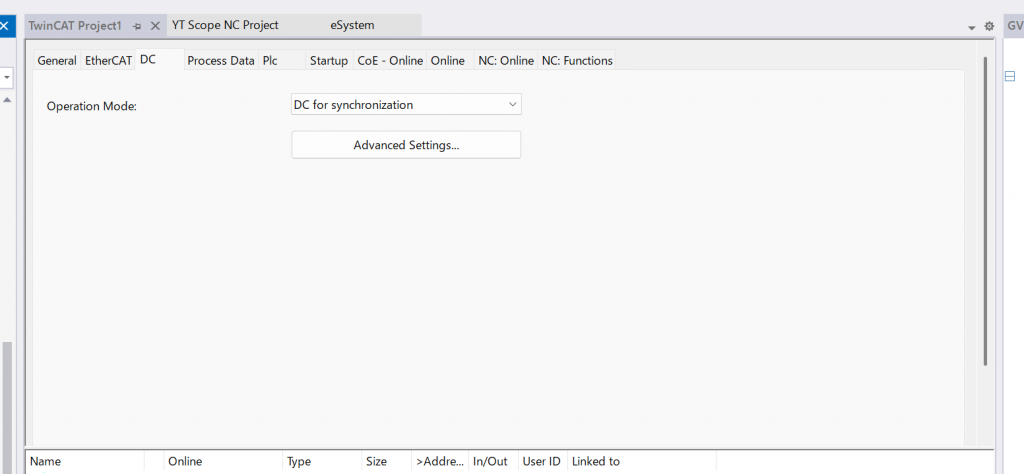
EtherCATスレーブ動作モード
SCシリーズのSERVOが手動で追加した場合はDC for synchronizationのOperation Mode設定するのは忘れなく。
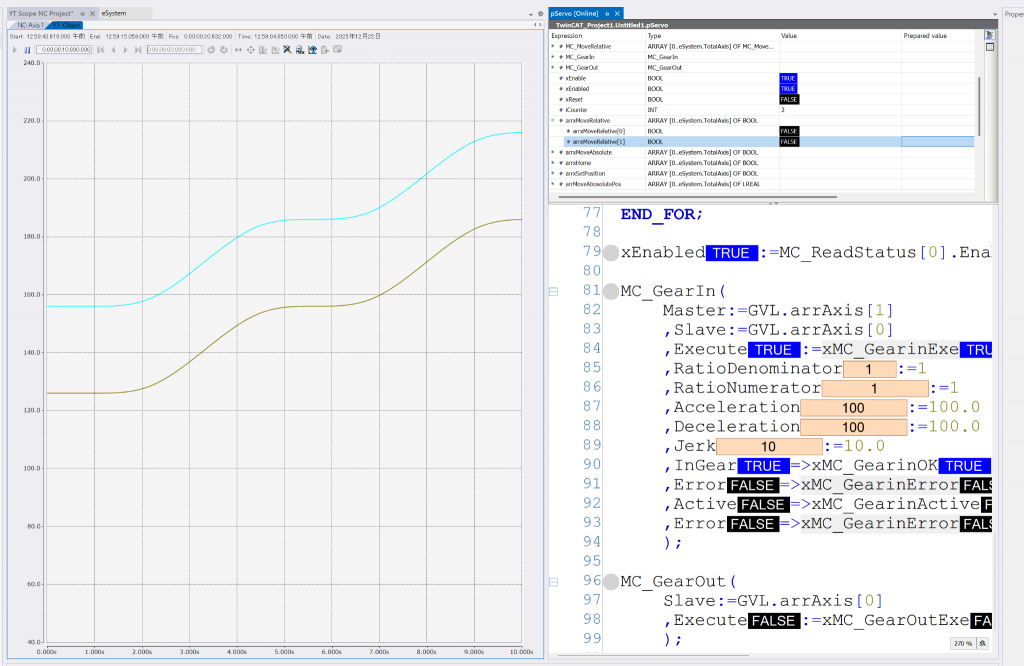
結果
この結果は、Master 軸と Slave 軸が GearIn により同期され、同じ比率で追従動作していることを示しています。
グラフを見ると、
- 一方の軸が動き出すと
- もう一方の軸も遅れなく追従し
- 段階的な動きでも関係が崩れない
という、ギア結合らしい挙動が確認できます。
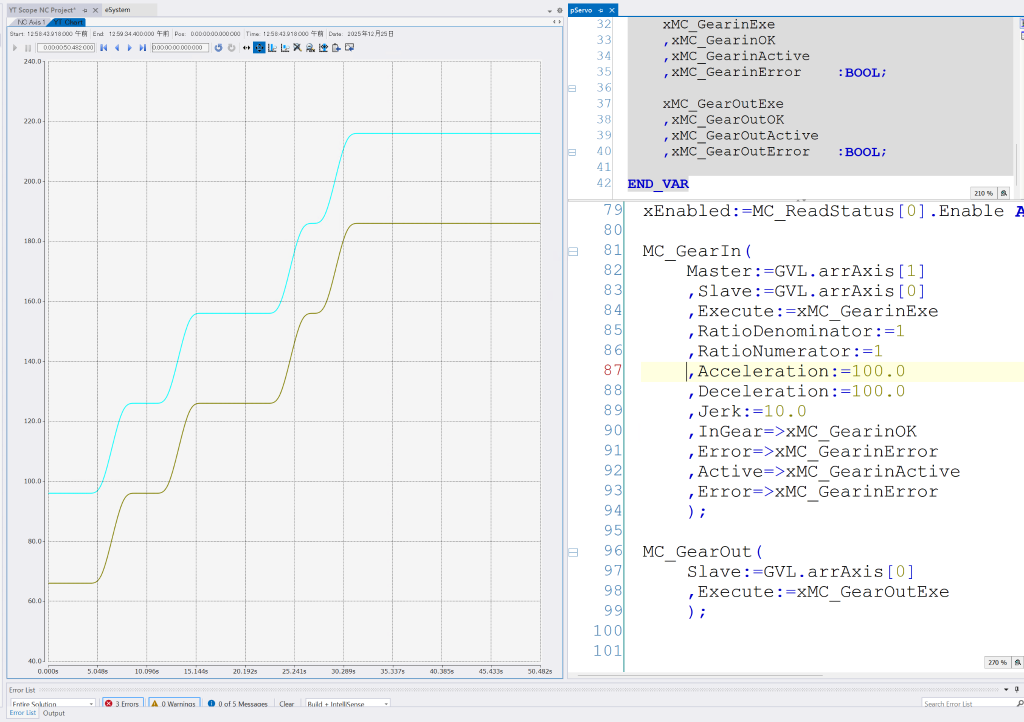
また、MC_GearInでInGearがTRUEであることがわかります。