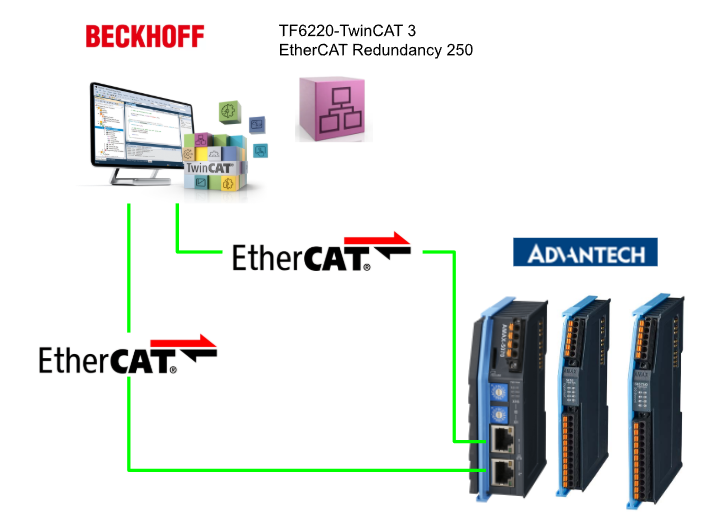
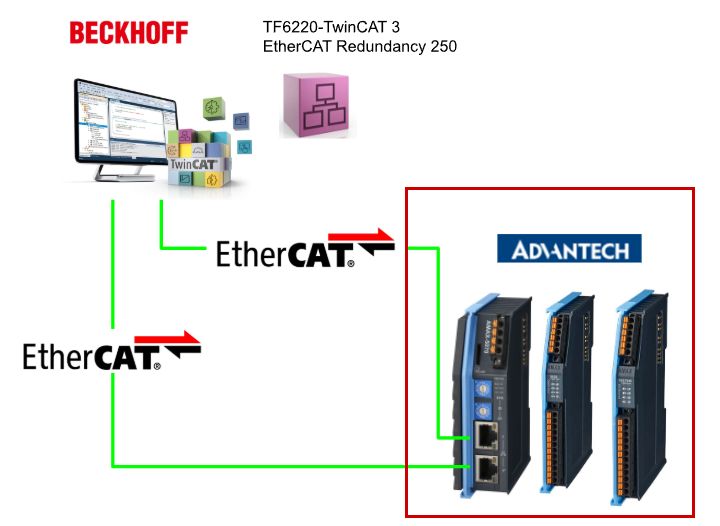
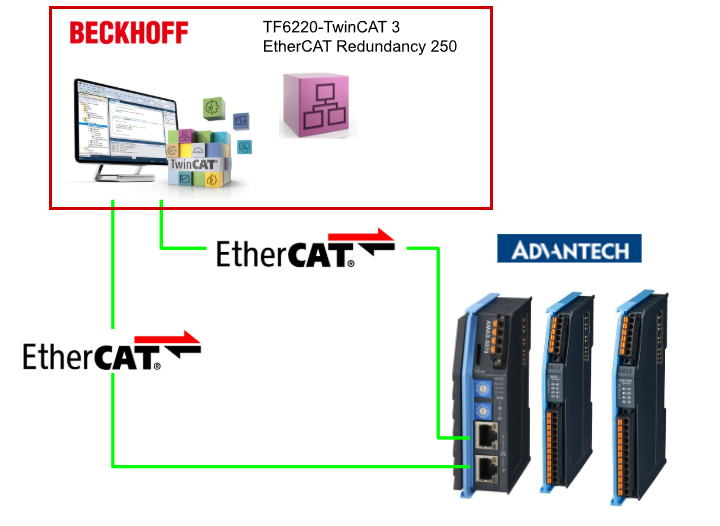
今回の記事ではBeckhoff TwinCAT3 TF6220を使用し、簡単なEtherCAT二重化ネットワークを構築します。記事内で使用してるのはAdvantech社製EtherCATカプラ「AMAX-5074」です。
さ、FAを楽しもう!
前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
技術は独り占めせず、届けるもの
私たちは工場の生産技術や制御に関する技術情報を、ブログや動画などで無料公開しています。「知識は誰でもアクセスできるべき」という信念のもと、現場で役立つ具体的なノウハウやトラブル事例などを発信してきました。すべて無料で続けているのは、「知らなかったせいで困る人」を少しでも減らしたいからです。
また、もしあなたの現場で…
- 「このPLCとデバイスの組み合わせ、ちゃんと動くのかな?」
- 「EtherCAT通信でうまくいかない部分を検証してほしい」
- 「新しいリモートI/Oを試したいけど社内に検証環境がない」
など、困っている構成や試してみたいアイデアがあれば、ぜひお知らせください。機器の貸出や構成の共有が可能であれば、検証し、記事や動画で発信します(ご希望に応じて匿名対応も可能です)。
支援のかたち
現在、私達の活動はほぼ無償で続けており、記事や動画の制作には、時間と検証環境の整備が必要です。この活動を継続的にコンテンツを提供するためには、皆様の温かいご支援が大変重要です。
メンバーシップ(ラジオの応援)
Fullさんとのラジオをより充実させるための支援プランです。
https://note.com/fulhause/membership/join
Amazonギフトリスト
コンテンツ制作に必要な機材・書籍をリストにしています。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon(ブログ・動画活動への応援)
月額での小さなご支援が、記事の執筆・検証環境の充実につながります。
https://www.patreon.com/user?u=84249391
Paypal
小さな支援が大きな力になります。
https://paypal.me/soup01threes?country.x=JP&locale.x=ja_JP
知ってたら助かること、届けたいだけです
あなたの応援が、知識の共有をもっと自由で持続可能なものにしてくれます。これからもどうぞよろしくお願いします。
soup01threes*gmail.com
技術はひとりじゃもったいない。
Reference Link
http://soup01.com/ja/category/beckhoff/
http://soup01.com/ja/category/protocol/ethercat/
TF6220-TwinCAT 3 EtherCAT Redundancy 250
EtherCATテクノロジーにより、ケーブル冗長性の実現が可能です。この目的のために、最後のEtherCATスレーブからマスターへの追加ケーブル接続が確立されます。ケーブル断線が発生した場合、テレグラムは代替接続を介してシームレスに送信されます。TwinCAT EtherCAT Redundancy 250は、最大250台のEtherCATデバイス(スレーブ)に対してケーブル冗長性を実現するオプションにより、TwinCAT EtherCATマスターを拡張します。TwinCAT EtherCAT Redundancy 250+(TF6221)は、250台を超えるEtherCATデバイスに対応するよう設計されています。設定と診断は、TwinCAT 3エンジニアリング環境で行われます。
原理
Beckhoff TwinCATケーブル冗長性は、EtherCATシステムにおける通信ケーブル区間の障害を補償するために設計されています。そのため、通常は双方向で動作するリングトポロジーが使用されます。リングのどこかで断線が発生した場合でも、両方のブランチに引き続きアクセスすることができます。
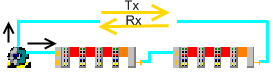
EtherCAT処理ユニット(EPU)は、EtherCATスレーブコントローラーの論理的なコアです。レジスター、メモリ、およびデータ処理要素を含んでいます。フレームは常にポートAからEtherCAT処理ユニットを通過する前に入力されます。EPUはEtherCATデータストリームを受信、解析、および処理します。
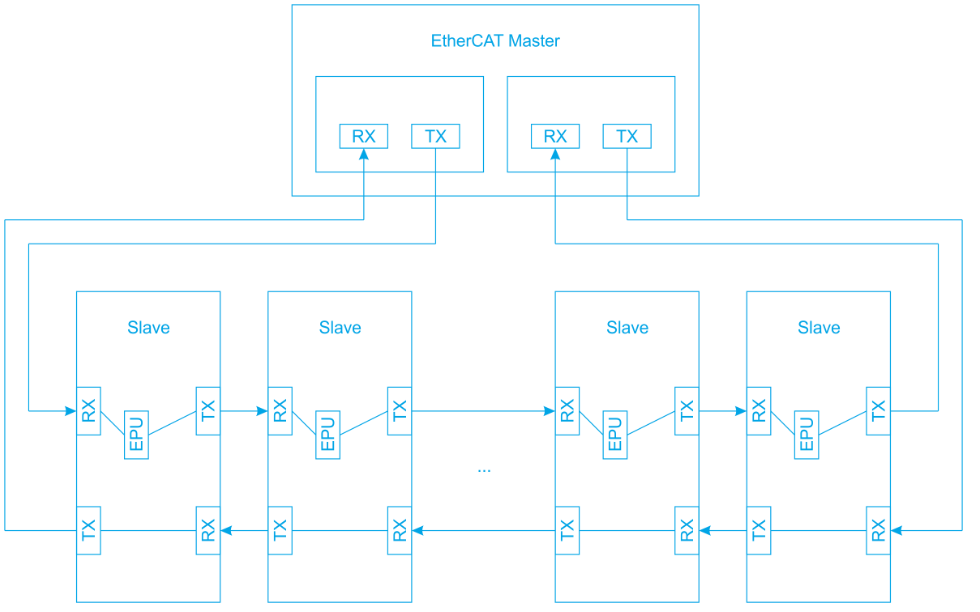
ケーブル冗長性はリングトポロジー内でのみ実装可能です。これには2つ目のネットワークアダプターが必要です。冗長モードでは、2つのアダプターがそれぞれ、最初は互いに同一のフレームを同時に送信します。フレームがスレーブデバイスのEtherCAT処理ユニット(EPU)を通過する際、EPUを介して対応するデバイスとデータを交換することができます。
一方のアダプターからのフレームは、入力ポートとしてポートAを通過する際に、EPUを介してスレーブデバイスとデータを交換します。リングトポロジー内のもう一方のアダプターからのフレームは、入力ポートとしてポートA以外のポートを経由する場合、スレーブデバイスからのデータは書き込まれません。ポートAからポートBへの経路ではフレームはEPUを介してスレーブデバイスとデータを交換できますが、ポートBからポートAへの経路ではフレームはスレーブデバイスからデータを受け取りません。
ネットワーク内にケーブル障害がないリングトポロジーでは、スレーブからの情報を含むフレームが一方のアダプターに到着し、もう一方のアダプターには、後者のフレームがポートAを入力ポートとして通過していない限り、元々送信されたときと同じ状態のフレームが到着します。
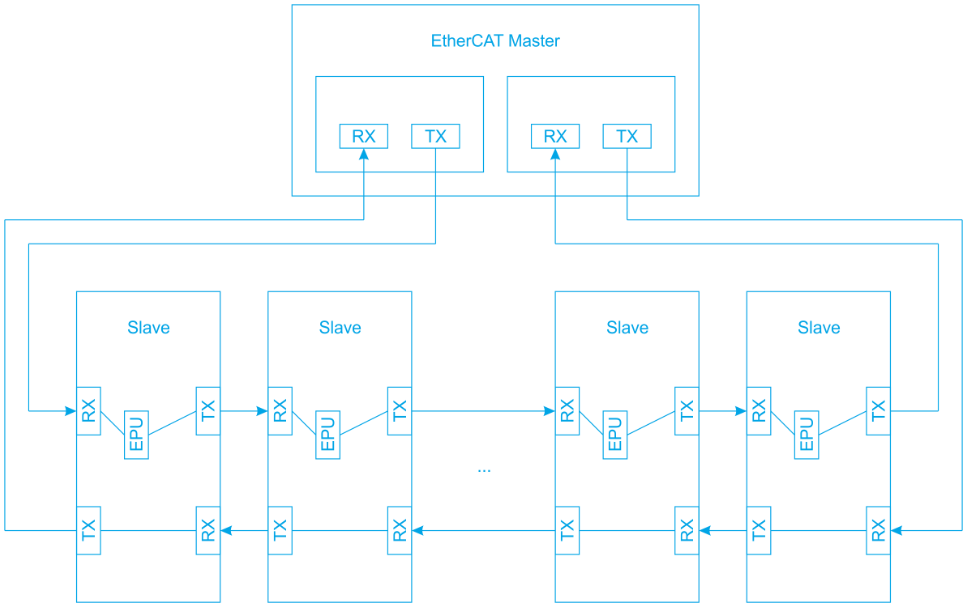
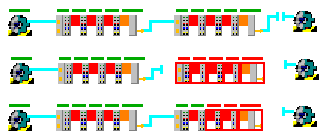
ケーブル障害が発生した場合、リングトポロジーは解消されます。ネットワーク内のリングトポロジーが失われるため、ケーブル障害が発生した時点でネットワークは冗長性を持たなくなります。しかし、元々のシンプルな冗長性が機能し始め、元のリングトポロジー内でネットワークが継続して動作することを保証します。2つのアダプターからの最初は同一であった2つのフレームは、それぞれケーブル障害の直前のポートまで移動し、そこから元のアダプターへと折り返します。
一方のアダプターを起点として、フレームの1つはポートAを入力ポートとしてケーブル障害直前のポートまで通過し、経路上にスレーブが存在する場合はEPUを介してスレーブとデータを交換します。このフレームはケーブル障害直前のポートから元のアダプターへと折り返します。折り返しの経路では、このフレームはスレーブからそれ以上データを受け取りません。
もう一方のアダプターを起点として、並行して送信されたフレームはケーブル障害直前のポートへの経路において、入力ポートとしてポートA以外のポートを経由するため、EPUを介してスレーブからデータを受け取りません。このフレームもケーブル障害直前のポートから元のアダプターへと折り返します。折り返しの経路では、このフレームはポートAを入力ポートとして通過し、経路上にスレーブが存在する場合はEPUを介してスレーブとデータを交換します。
最終的に、最初のアダプターから発信されたフレームと2番目のアダプターから発信されたフレームの両方が協調して、すべてのスレーブデバイスへのデータ供給とデータ収集を完了します。
冗長性ケース
冗長性は通常とは異なる動作状態です。以下に示した診断変数を評価することで冗長性ケースの発生を早期に検出し、原因を速やかに修復できます。
Implementation
ここからネットワーク構築をしていきます。
AMAX 側
最初にAdvantech側から始めます。
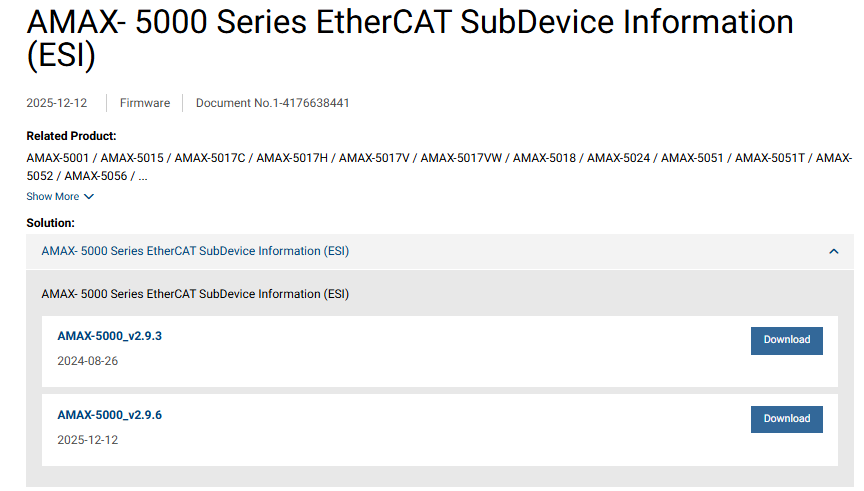
ESIファイルをダウンロード
下記のLinkAMAXシリーズのESI FILEをDownloadしてください。
https://www.advantech.com/en-us/support/details/firmware-?id=1-1X2NUUH
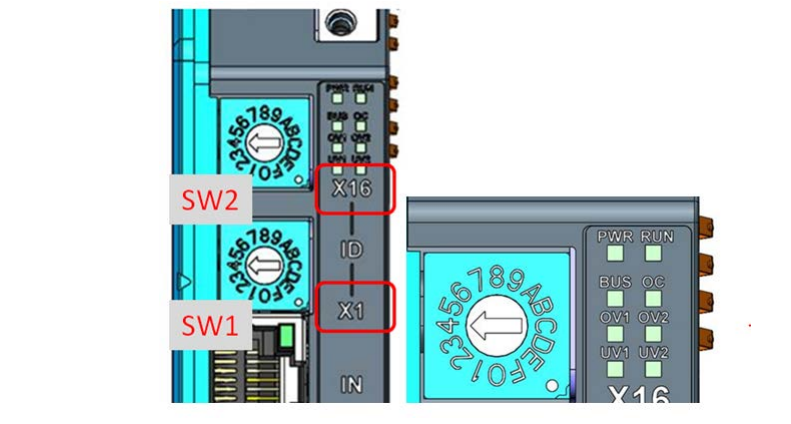
ID設定
実際のアプリケーションに合わせてIDを設定しましょう。
Beckhoff 側
次はBeckhoff側です。
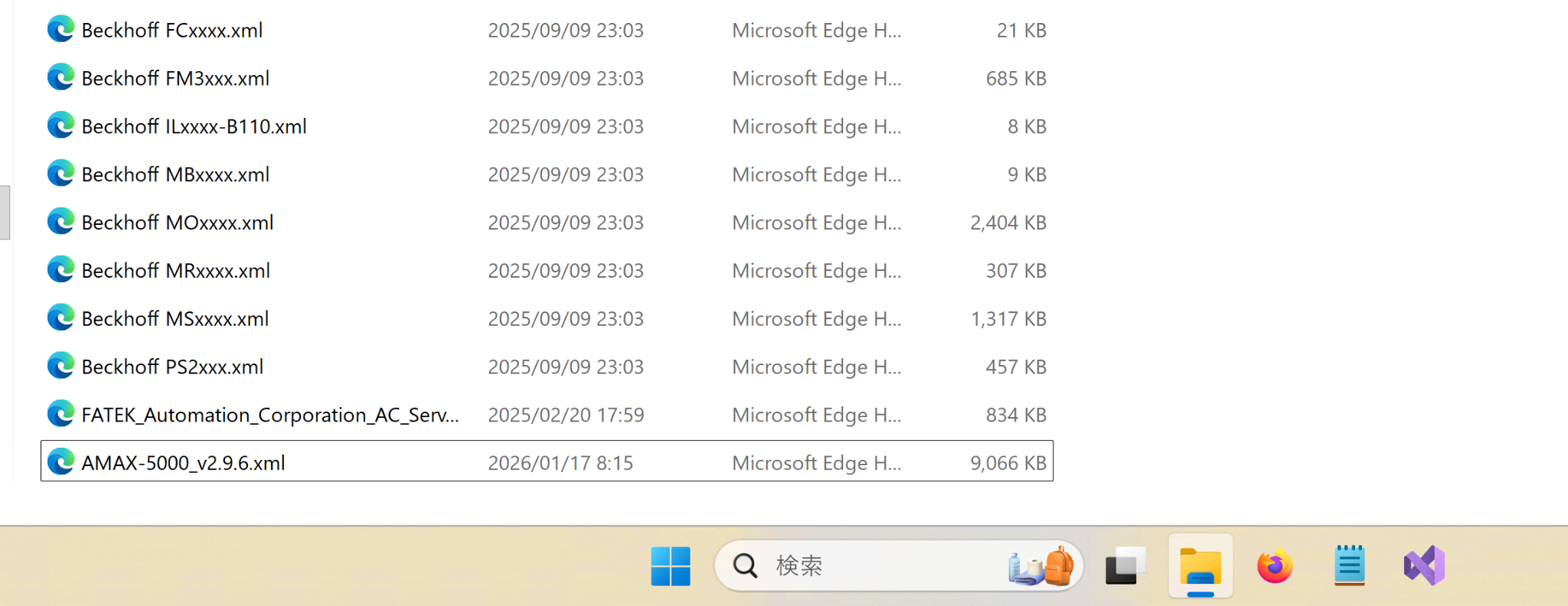
ESI Fileをインストールする
先程DownloadしたESI Fileを下記のPathに格納します。
C:\Program Files (x86)\Beckhoff\TwinCAT\3.1\Config\Io\EtherCAT
EtherCAT マスター追加
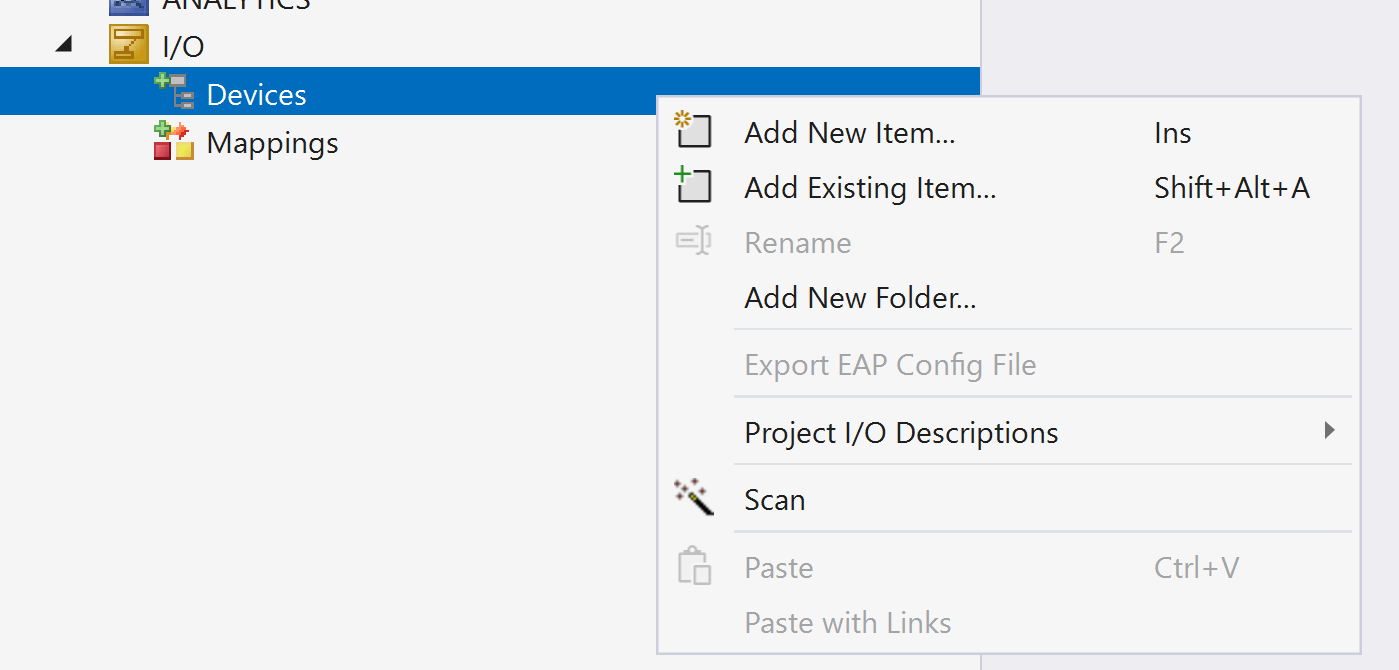
TwinCATプロジェクトの「I/O」ツリー上で右クリックし、コンテキストメニューから「Add New Item…」を選択することで、新しいI/Oデバイス(EtherCAT Masterなど)を手動で追加することができます。
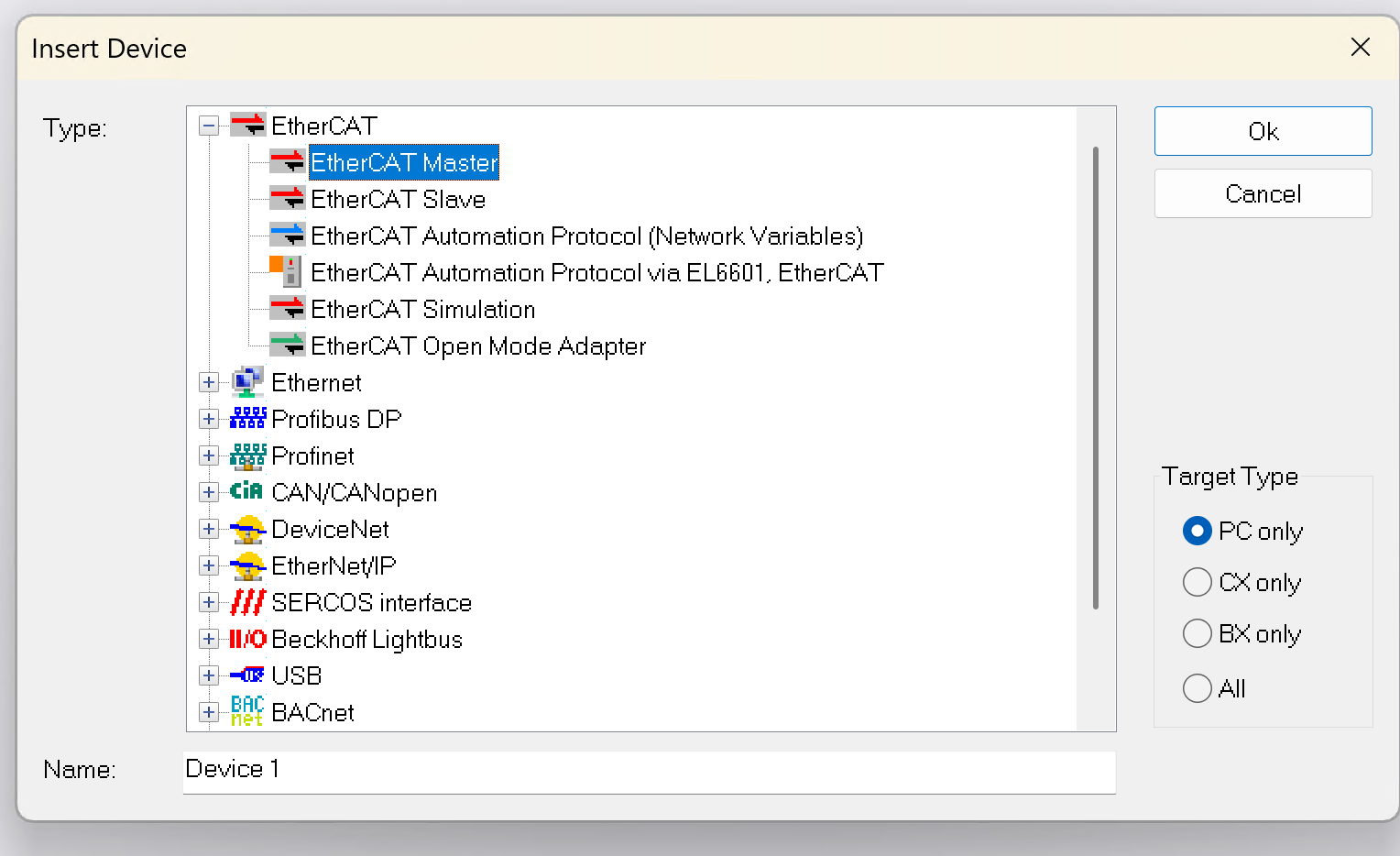
「Add New Item…」を選択すると、「Insert Device」ウィンドウが開きます。ここでは追加するデバイスのタイプを選択できます。今回はBeckhoffのEtherCATマスターを使用するため、EtherCAT → EtherCAT Masterを選択します。
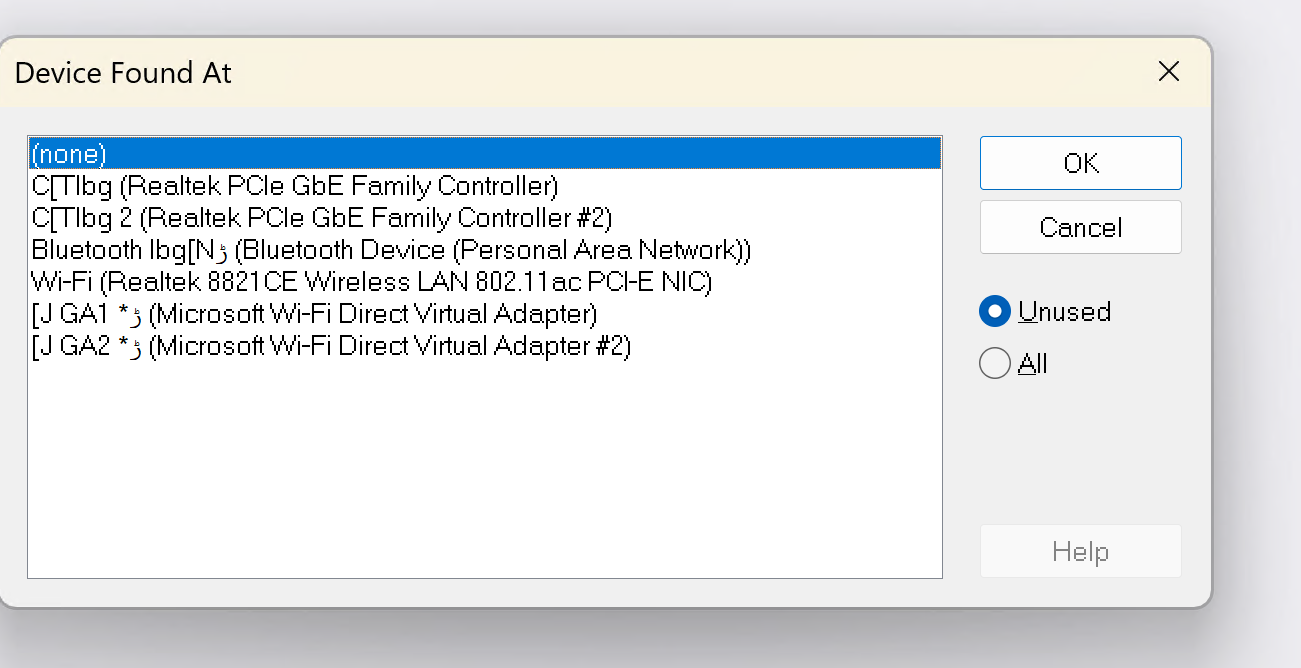
EtherCAT Masterを追加すると、自動的にPC上のEtherCATデバイスを検索し、「Device Found At」ダイアログが表示されます。
ここでは、見つかったEtherCAT通信カードや仮想デバイスを一覧から選択し、使用するスロットを指定します。
ドライバの設定
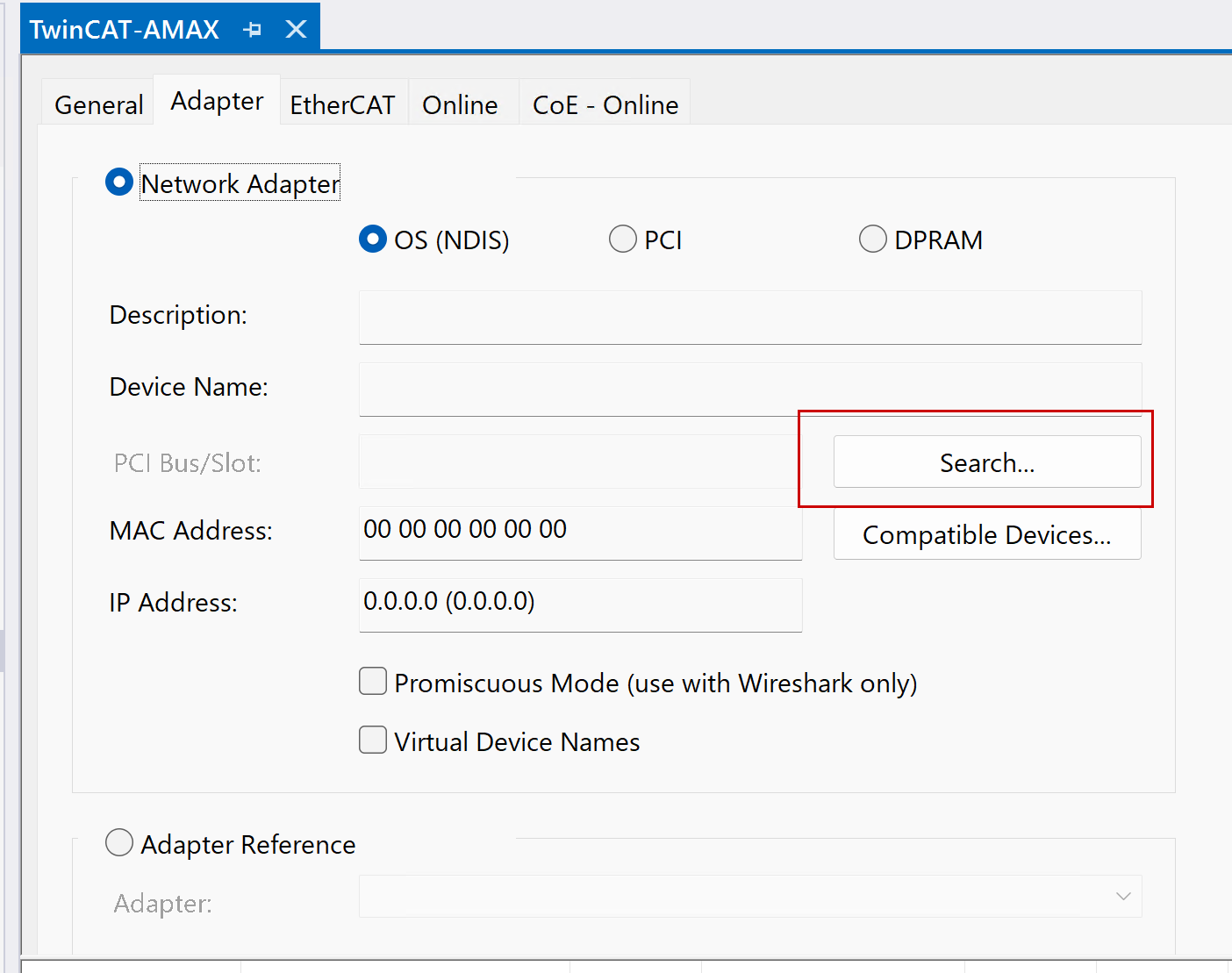
この画面はTwinCATのEtherCATマスター設定におけるAdapter(アダプター)タブで、EtherCAT通信に使用するネットワークアダプターを選択・設定します。
赤枠で囲まれた 「Search…」ボタン をクリックして、システム上の利用可能なEtherCAT対応ネットワークアダプターを検索・選択します。
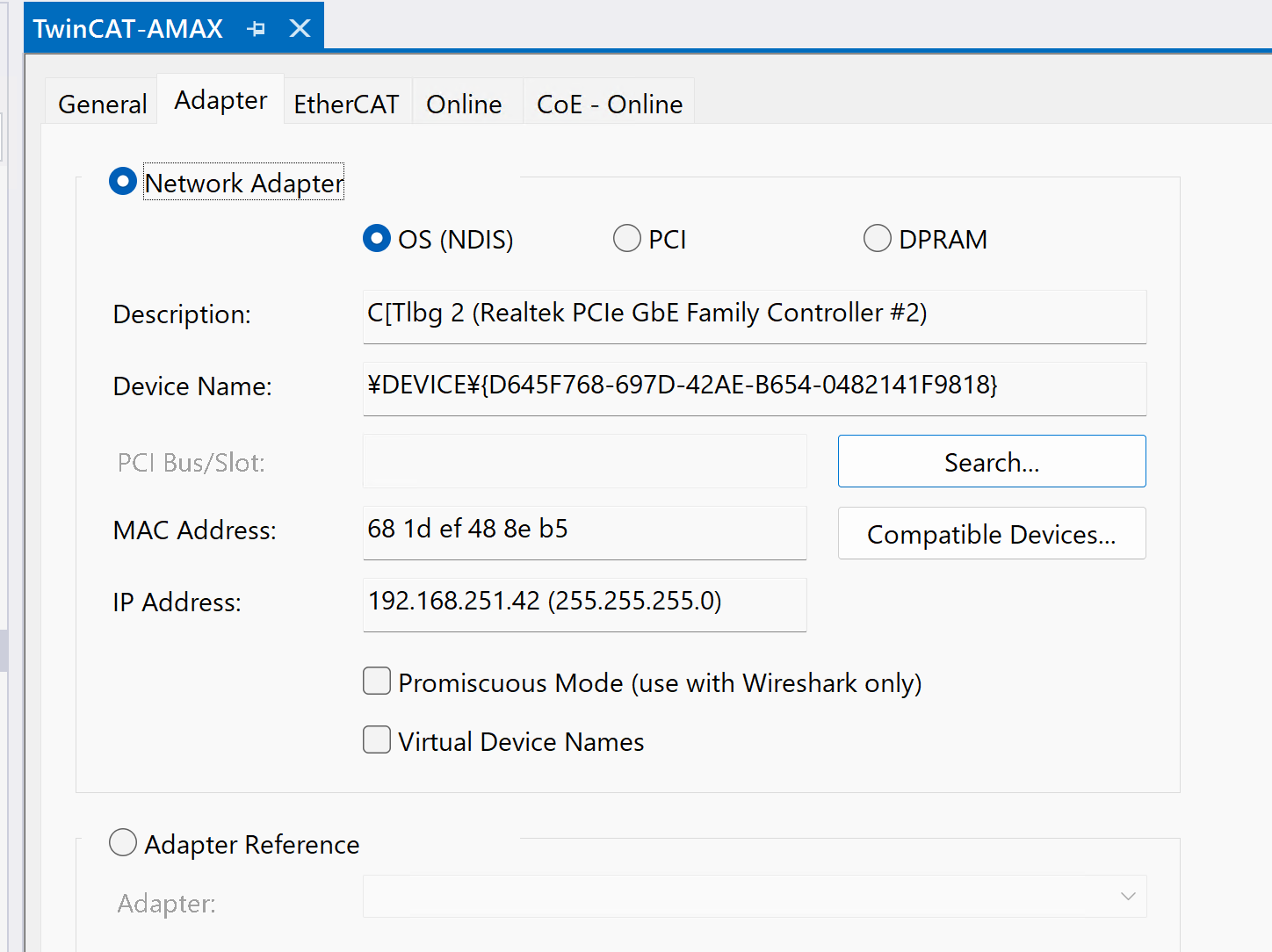
「Search…」ボタンをクリック後に表示される、システム上で検出されたネットワークアダプターの一覧画面です。その中から適切なネットワークアダプターを選択します。

この設定により、TwinCATはこのネットワークアダプターを通じてEtherCATスレーブデバイスと通信できるようになります。
スキャン
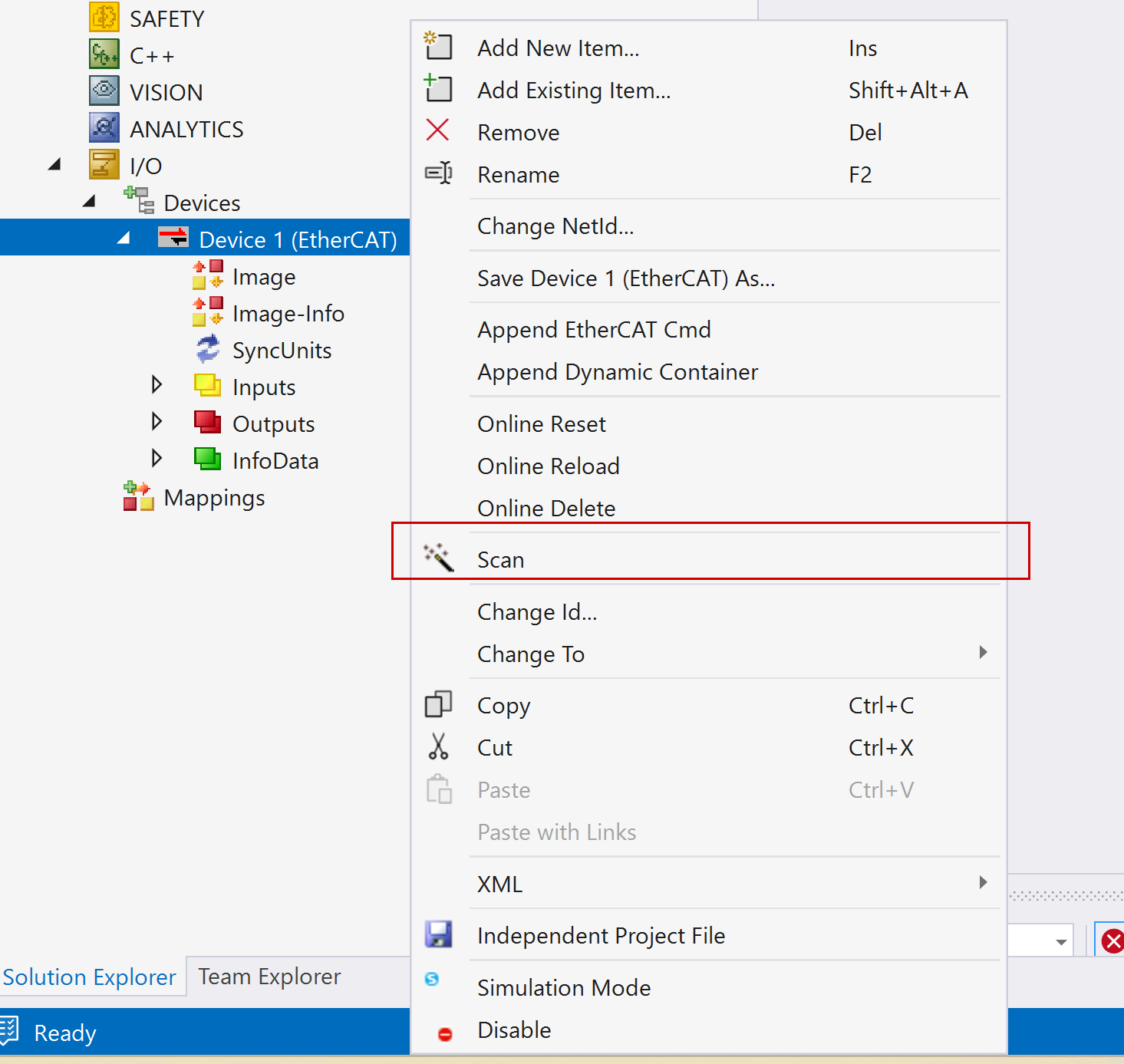
EtherCATマスター(Device 1)を右クリックすると、表示されるメニューの中に「Scan」があります。この「Scan」をクリックすることで、TwinCATが実際に接続されたEtherCATスレーブ機器を自動検出し、構成に追加してくれます。この機能は、複数のI/O端子や通信モジュールがEtherCATラインに接続されているときに非常に便利で、機器のE-Bus順に正確に取り込むことが可能です。
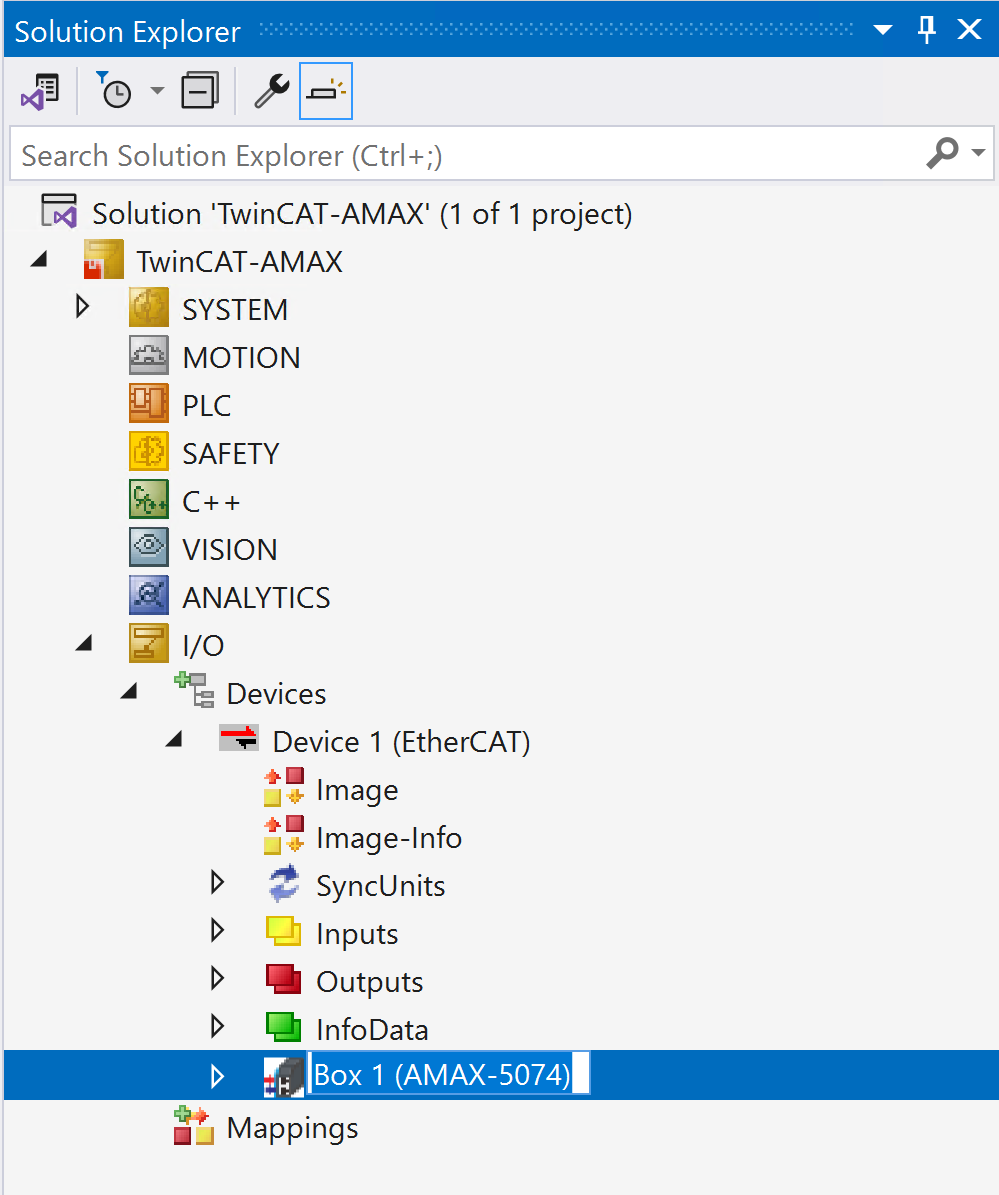
Auto Scanが正常に完了し、EtherCATスレーブ(AMAX-5074)が認識されています。
Setting
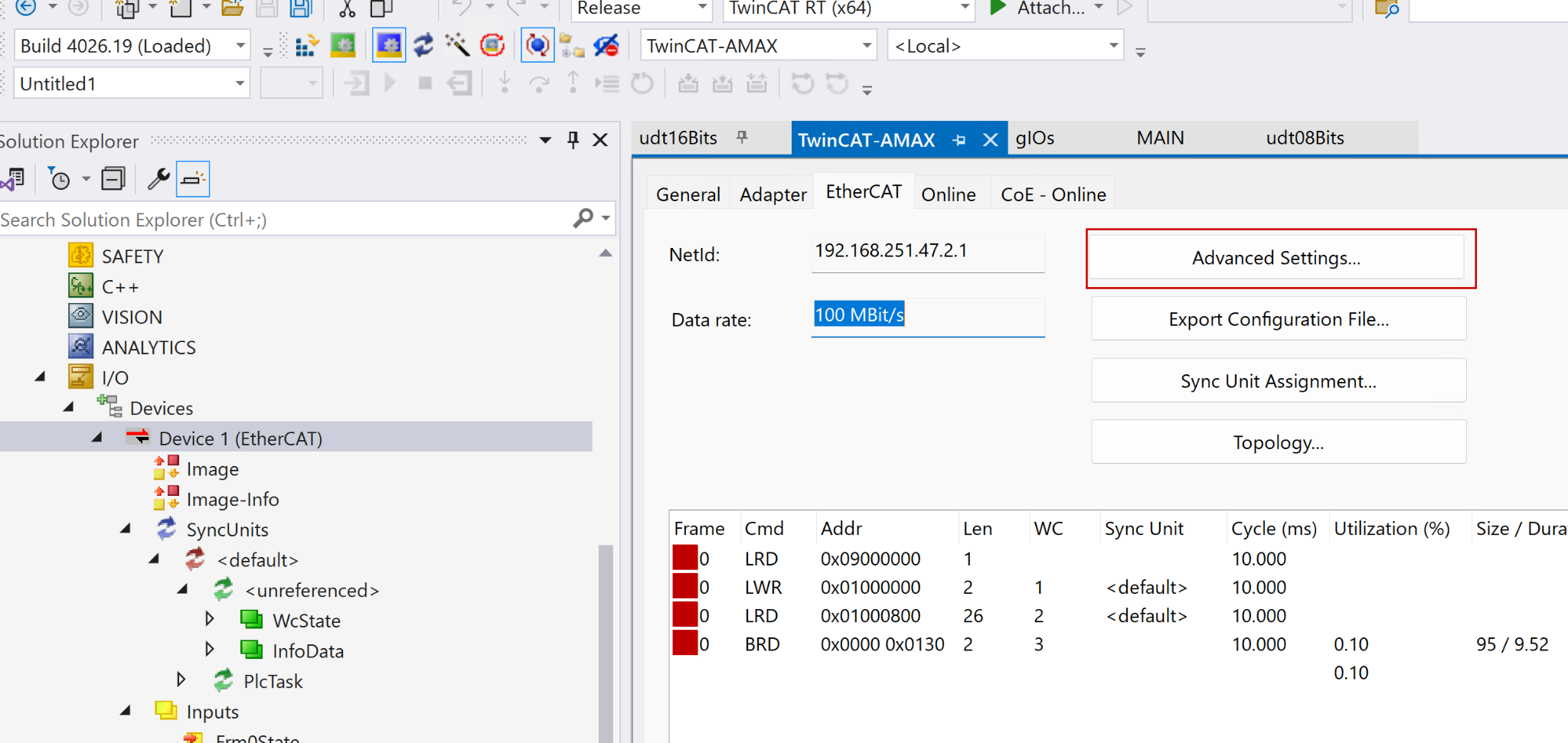
2重化設定を行うには、EtherCATマスター→EtherCAT Tab→Advanced Settingsをクリックします。
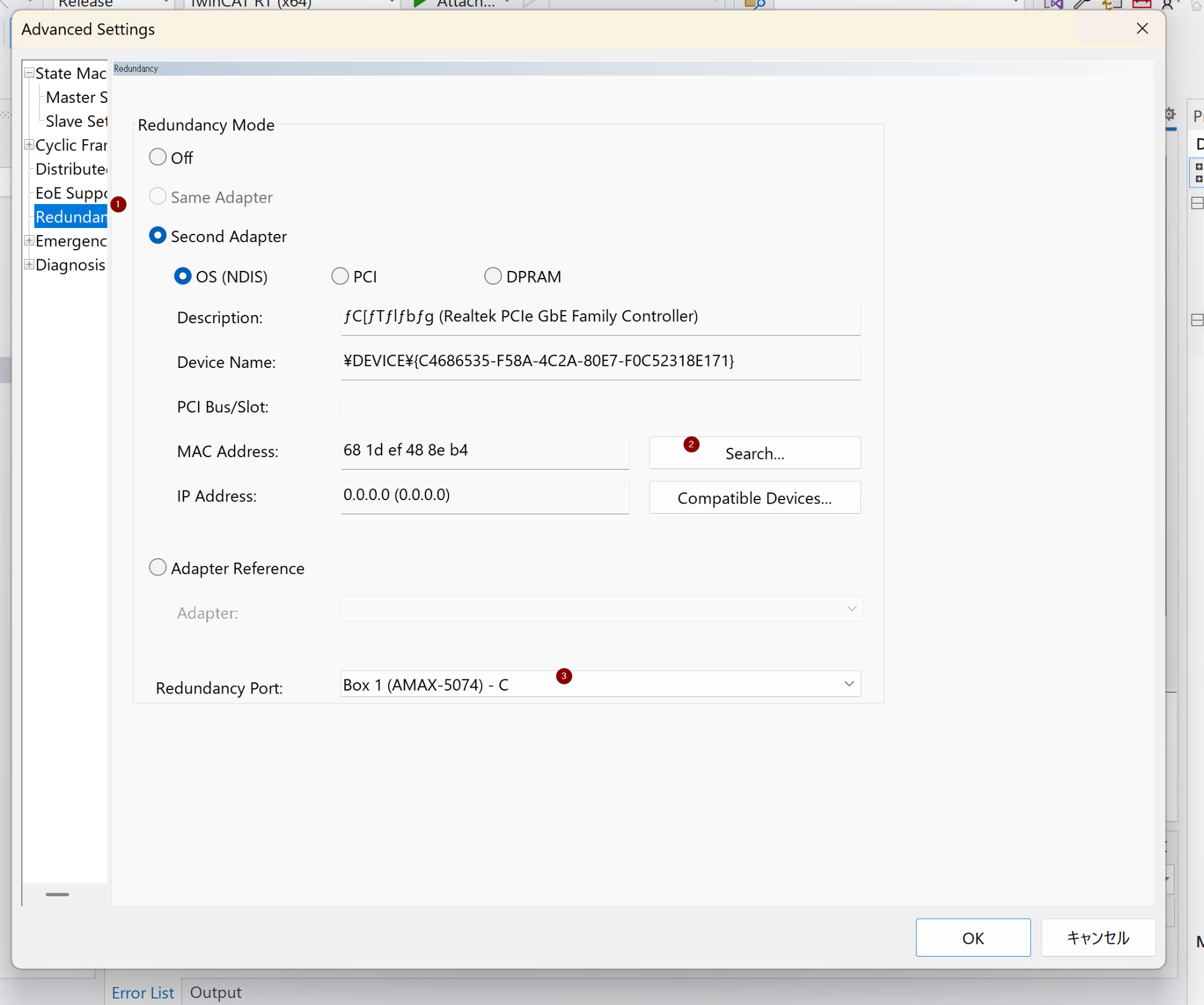
Redundancyをクリックし→Second AdapterをOSに設定します。
次はSearchで2つ目のEtherCATマスターインタフェースを設定しましょう。
ダウンロード
最後はプロジェクトをTwinCAT3 RuntimeにDownloadしていきましょう。