Visual Components のTutorial第4話です。今回はRobot Transport Controllerについて紹介します。さ、はじめよう!

Target
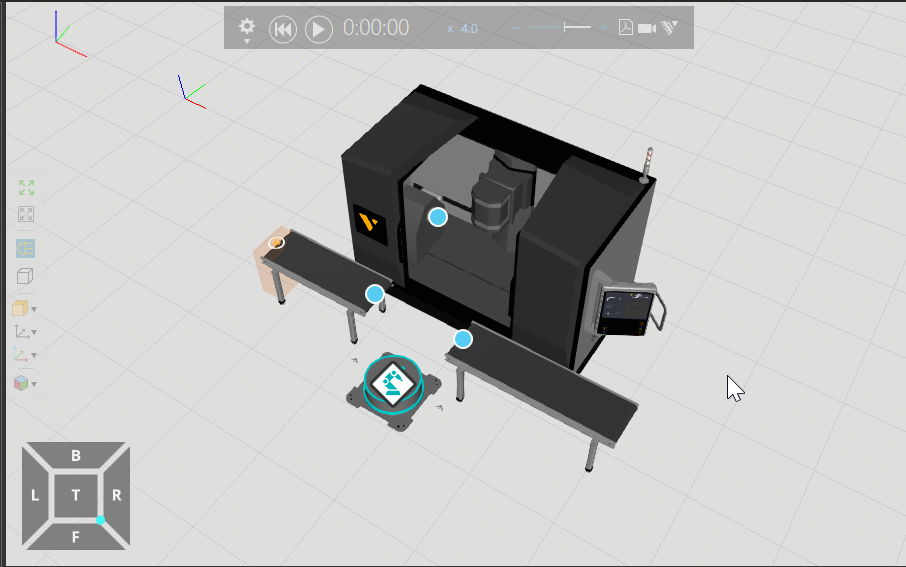
こちらは今回のTutorialの結果です。ロボットがConveyorからものを掴み、Machine Centerに入れて、最後は別のConveyorに運ぶような動作です。
Reference Link
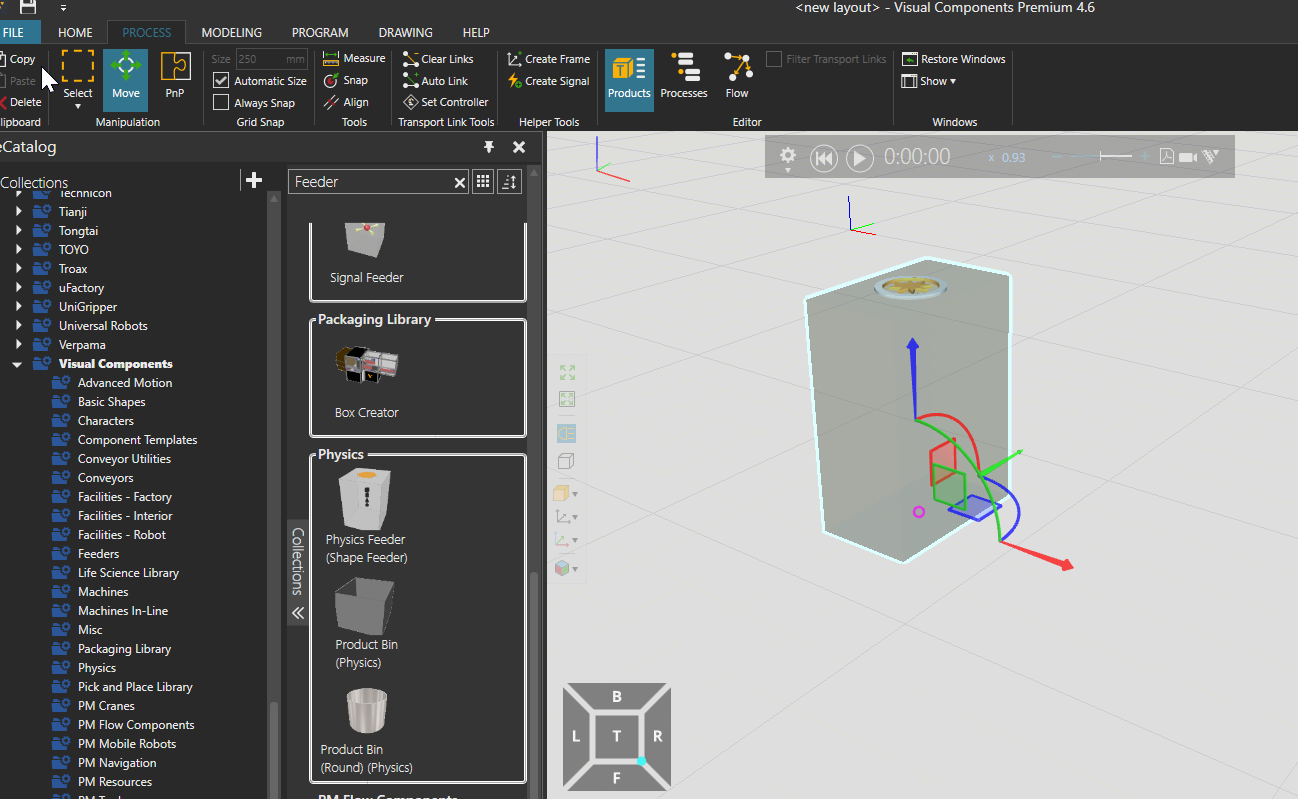
Insert Feeder
Partを生成するためのFeederを追加します。

Done!こちらのFeederから生成されたParts、最終的にロボットにPickされ>Machine Centerに入れます。
Link to the Coveyor
次はConveyorを追加し、FeederとConveyorを連結します。

Done!いまFeederから生成されたPartsがConveyorに流れるようになりました。

もう1つのConveyorを追加します。こっちらのConveyorはMachine Centerから加工終わったPartsをロボットが取り出して、次の工程に運ぶためのConveyorです。

Add Machine Center
Collections>MachinesからParametic Vertical Millをプロジェクトに追加します。
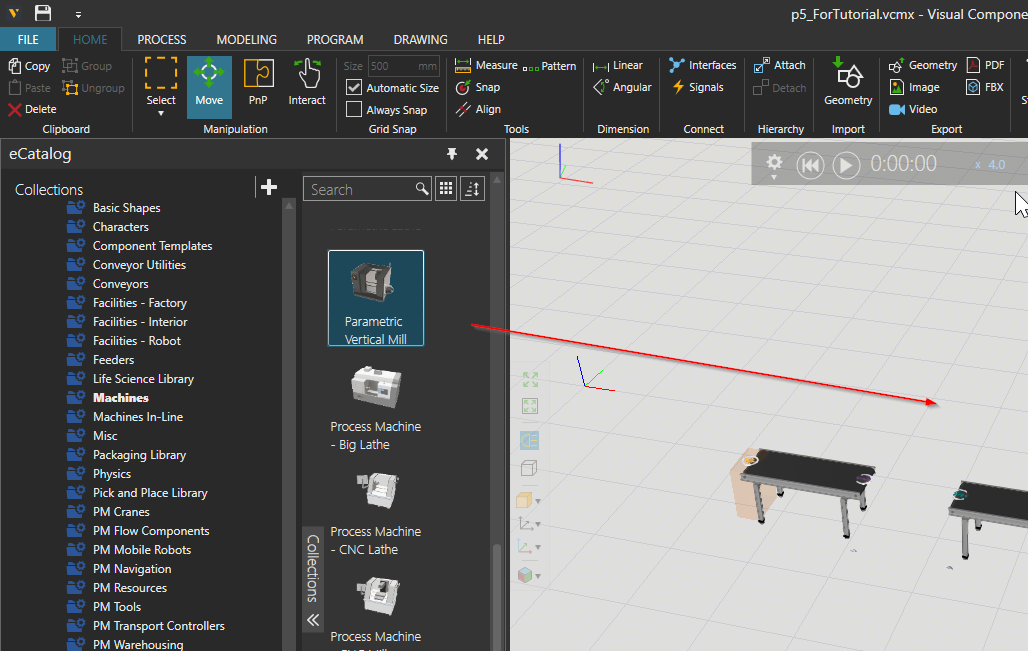
Done!機械の基本Layoutが構築完了。
Edit Flow
PROCESSのツールBarからFLOWをクリックします。

各部品から青い点が表示されます。
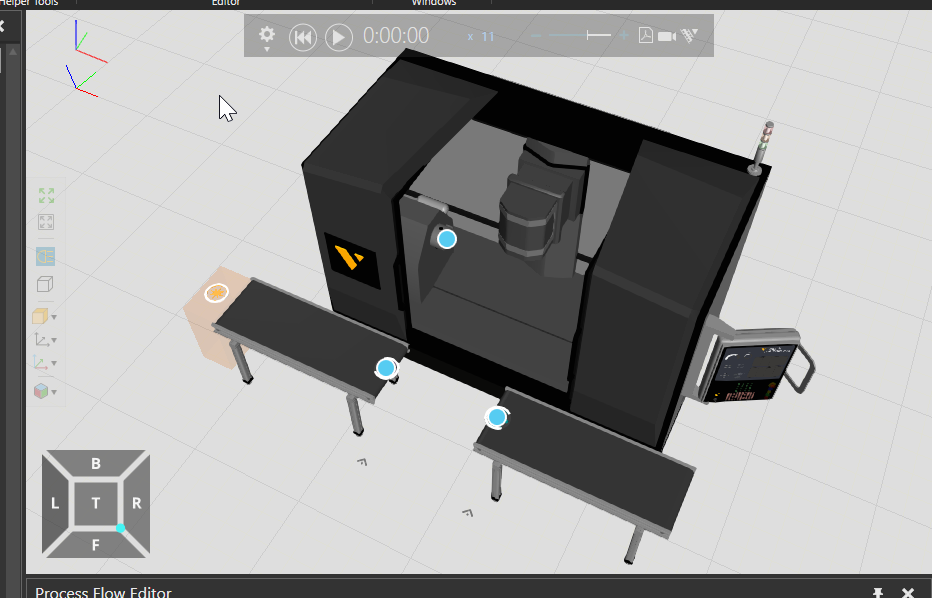
MouseをConveyorの出口にある青い点に移動すると”FromConveyor”という表示が出ています。つまりFlow上でこのConveyorから流れてきたPartsをこの青い点に到着すると別の部品に流すことができます。

この”FromConveyor”の青い点文字をクリックすればProcess Flow Editorに、”FromConveyor”がFlow Stepsに追加されます。

Configure the Flow
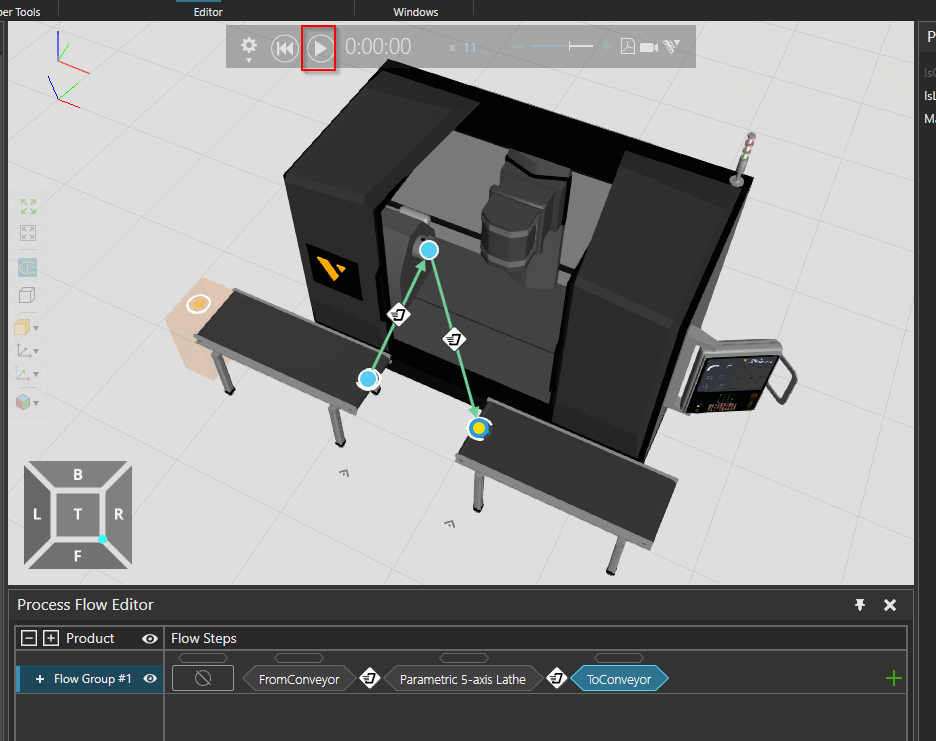
SimulationのFlowを考えましょう。部品がConveyor1まで運び、Machine Centerで加工されます。そして加工されたPartsがConveyor3からまた別の工程に運ぶ、のようなFlowです。

Visual Componentsが部品間のFlow構築は下図のように簡単なClick 操作でできます。
Play
PlayボタンでFlowを確認しましょう。
Done!部品がConveyor1から流れてきて>Machine Centerに入って>Conveyor2に移動するようになりました。
Robot Transport Controller
次はCollectionsからPM Transport Controllers>Robot Transport Controllerを追加します。
Robot Transport Controllerはロボットを経由してFlowを簡単に制御できる部品です。

Done!
Add Robot
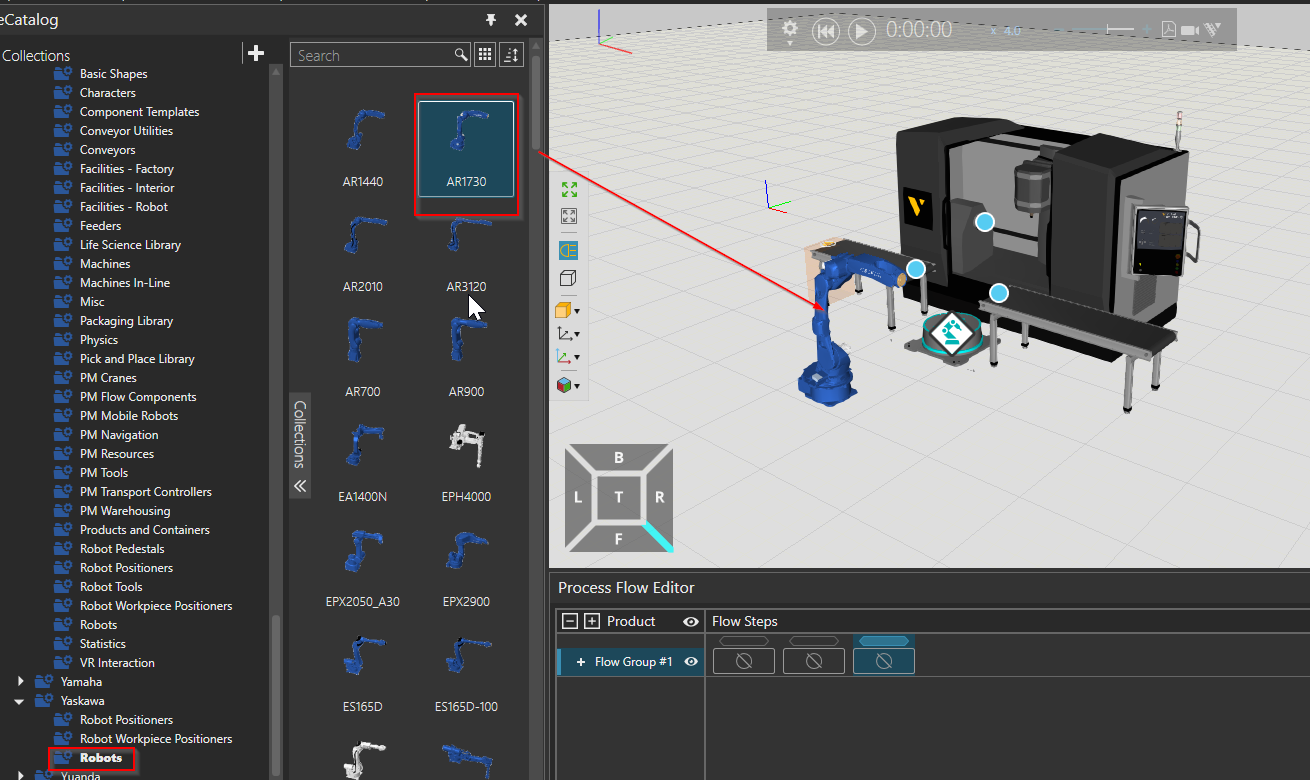
次はロボットを追加します。
Connect
今回のFlowはConveyor1から来た部品をロボットがMachine Centerに運んで、そして加工されたものをConveyor2に持っていきますね。なので、ロボットをRobot Transport Controllerと接続しましょう。
下図のような操作になります。

Add Tools
Partsを掴むにはToolsが必要ですね。CollectionsからToolを追加します。

そしてToolをロボットと接続します。

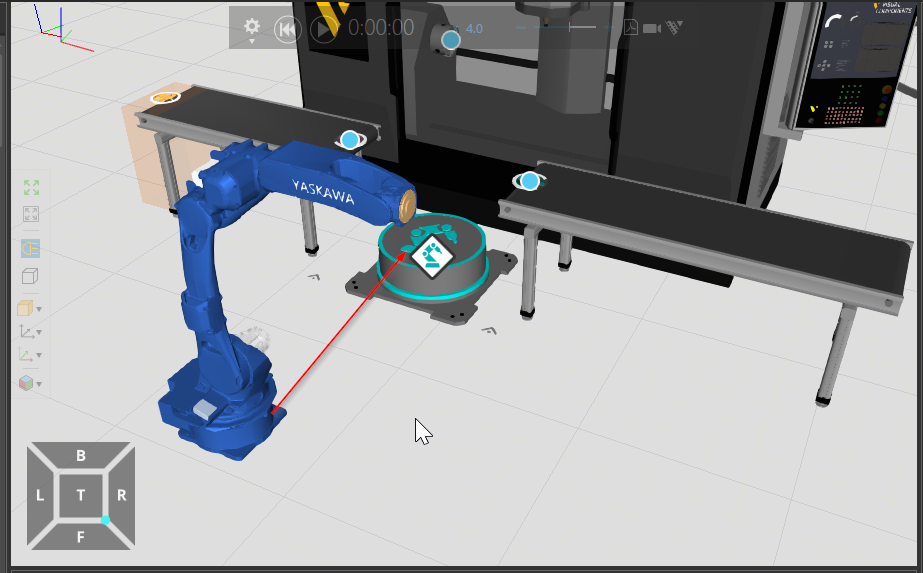
Done!

Edit the Flow
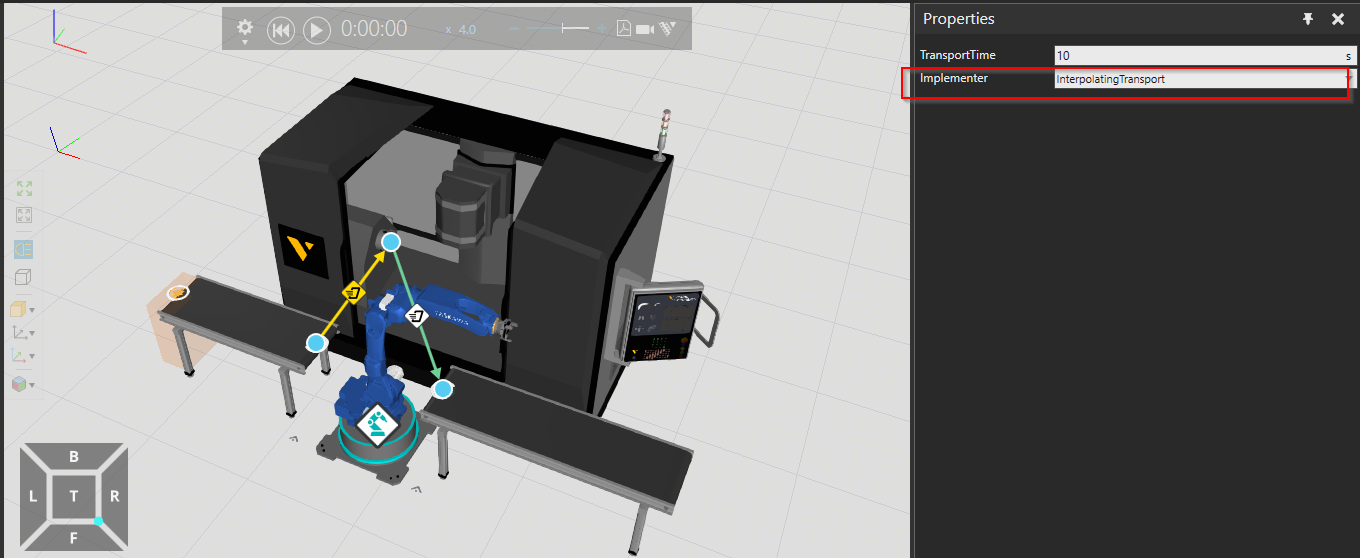
最後にFlowを編集します。いまFlow Stepにある2つのStepがクリックします。

Propertiesの画面にImplementerという項目があります。
この項目からFlow間の移動を実装する部品を設定できます。
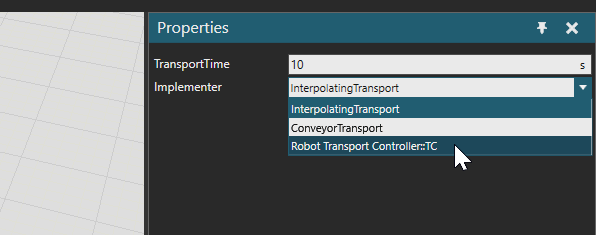
Drop-ListからRobot Transport Controller:TCにします。
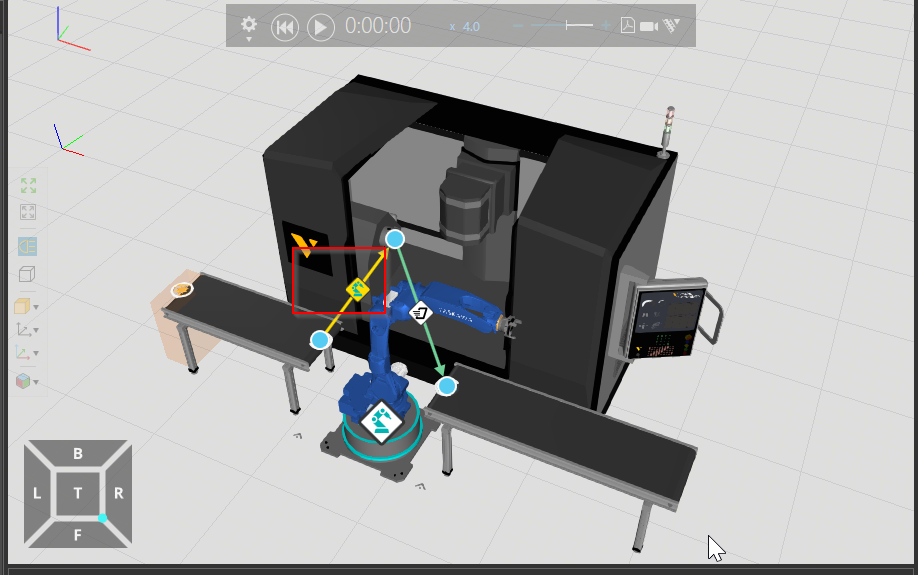
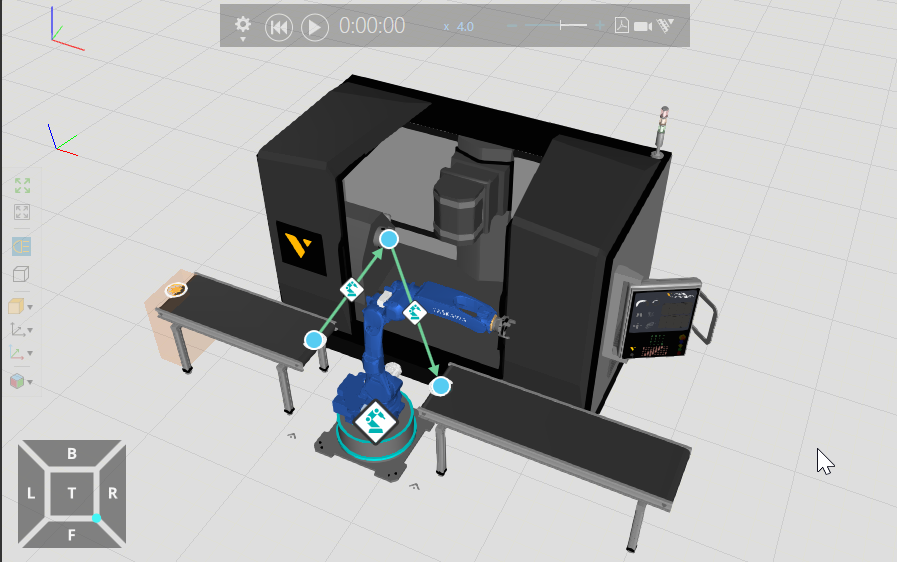
Done!Flow StepのIconがロボットに代わりました。
Done!
Configure Feeder
最後はFeederの部品生成速度を設定します。

ProductCreatorのTabを開くと、部品生成に関する設定を一覧できます。
今回はIntervalという項目を調整するれば部品生成の間隔を設定できます。

Result
Done!