今回はSpeed 制御について少し話しします。Robotの作業環境には様々なSensorが取り付けされており、人間が侵入しても検知するのは目的です。それらのSensorの目的はRobotのSpeedを落とすか停止させ、検知>Slow Down>更に検知>Stop>復旧のようなイメージです。そのようなSensorはキーエンスやFestoなどのいろんなメーカも作ってて中にNon-Safety・Non-Dual InputのAux接点がついてるものもあります。あなたはその接点を使用しDIとつながり簡単なSpeed Controlを実装できます。今回の記事はそれの実装する目的です。
DI設定
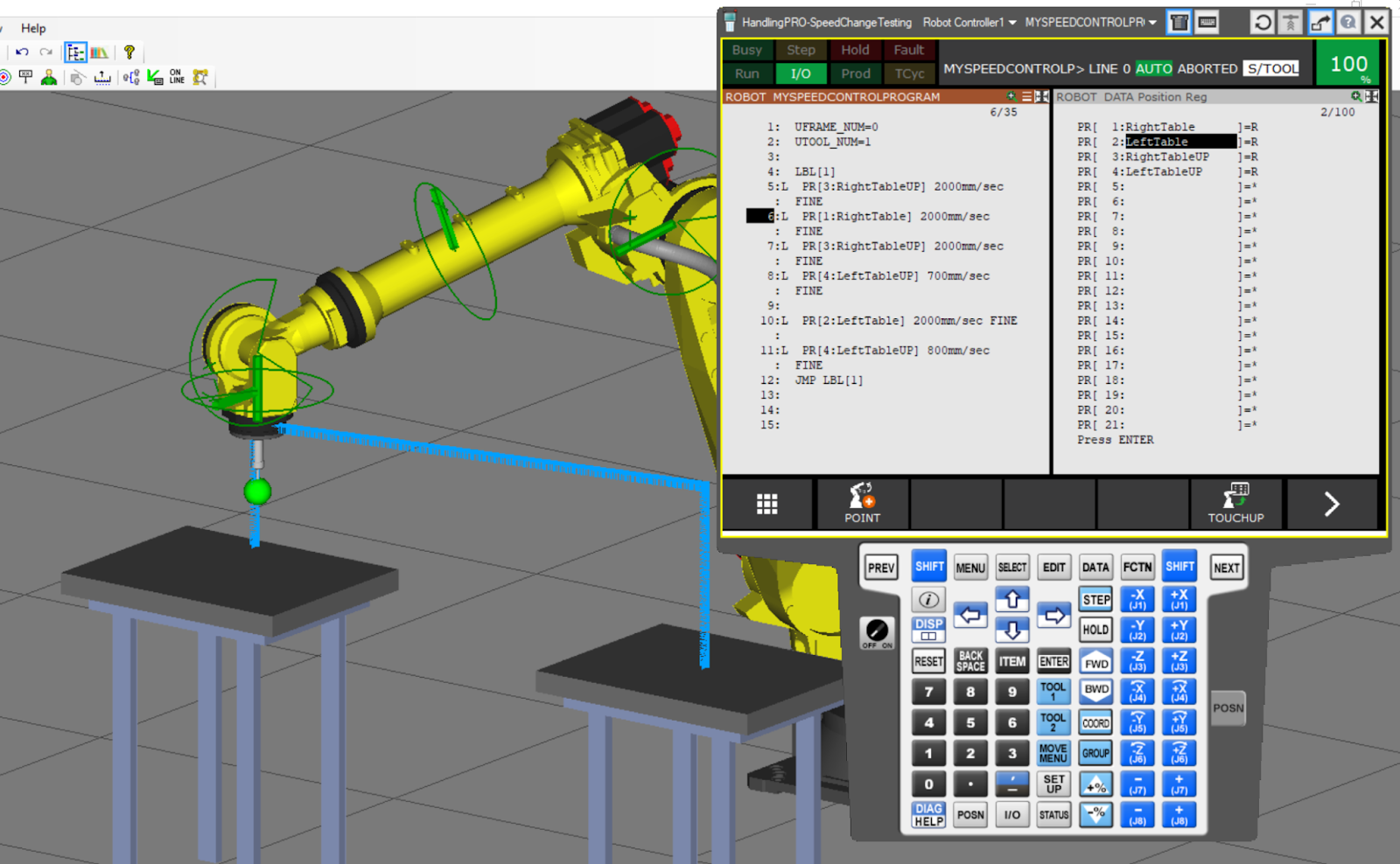
まず簡単な繰り返しのプログラミングを作成しました。
次はTeach pendantからI/Oを開きます。
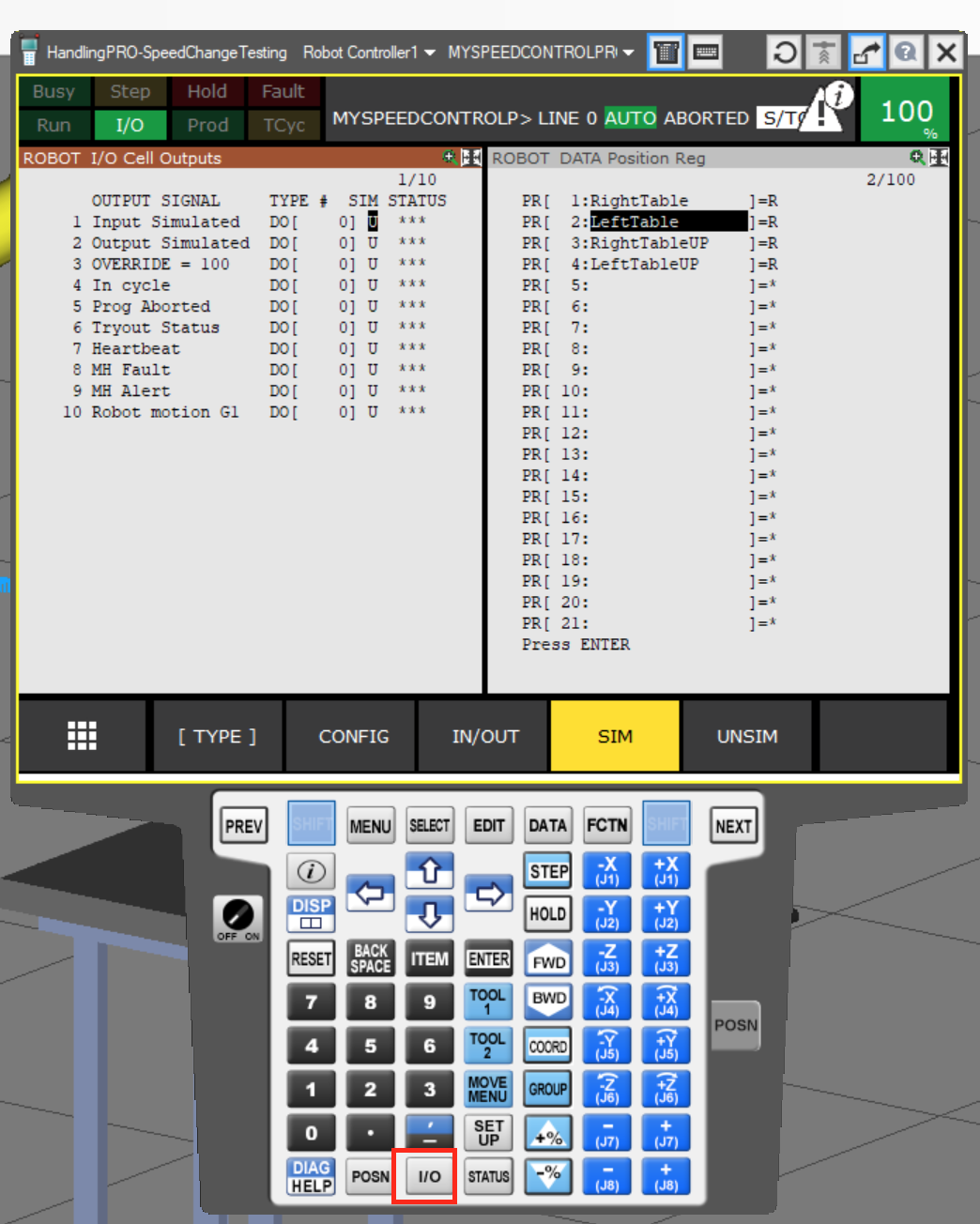
Type>Digitalをクリックします。

もし最初に表示されたのはDOであれば>ボタンでDIに切り替えます。
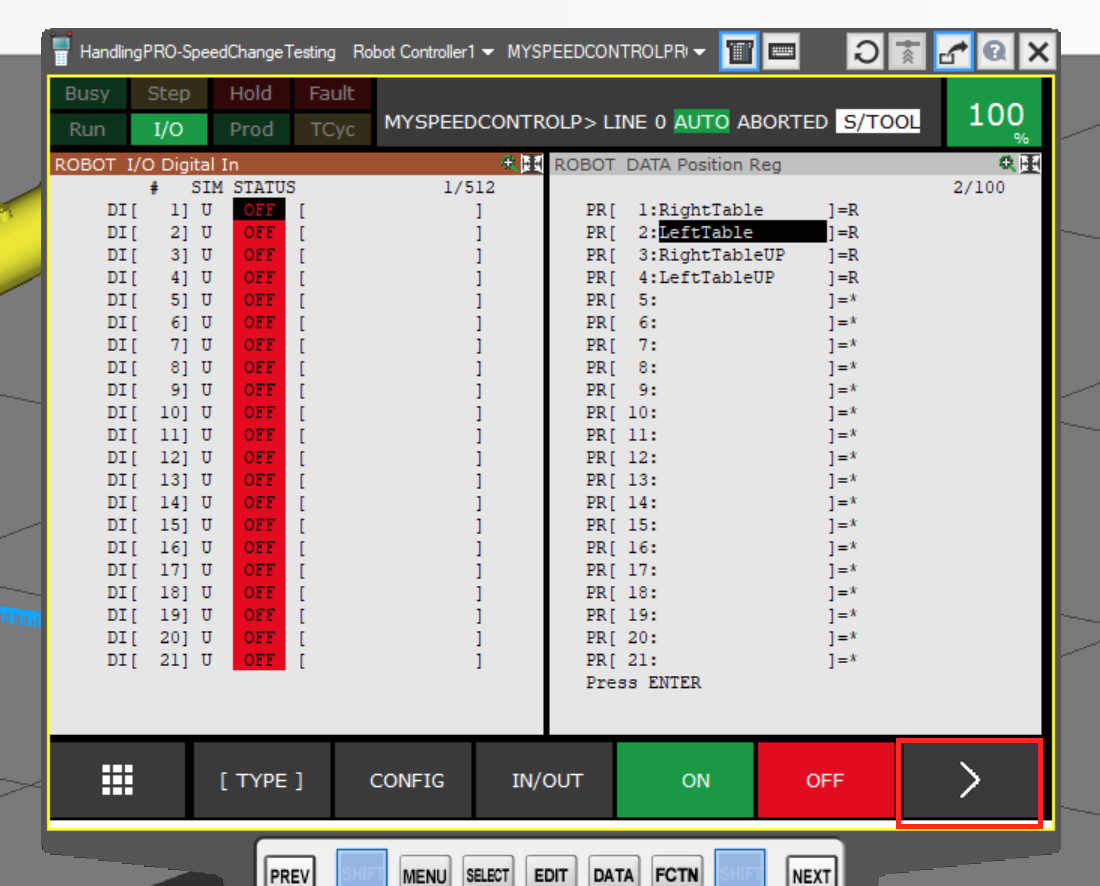
次にDIの画面からDETAILをクリックします。
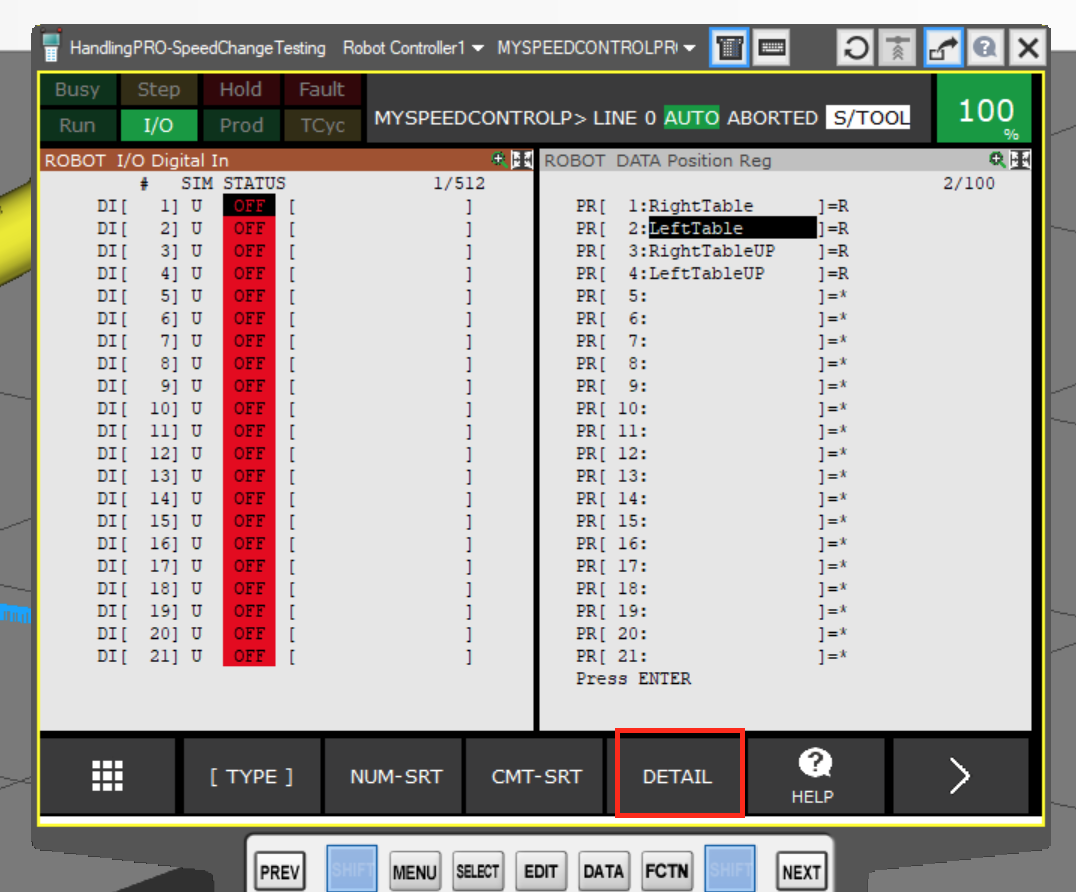
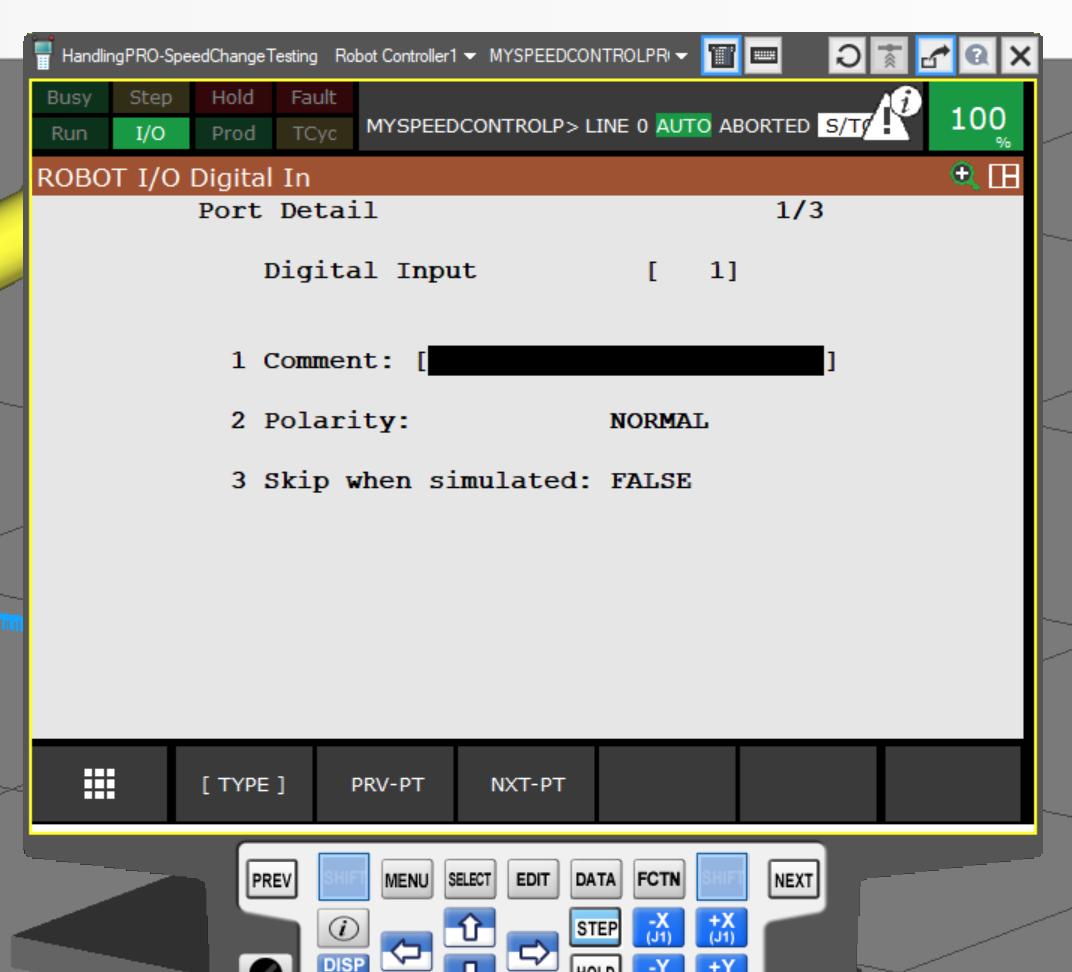
各DIの設定詳細になります。
Digital Input[ 1 ]はいまDI1のデータを示してることです。
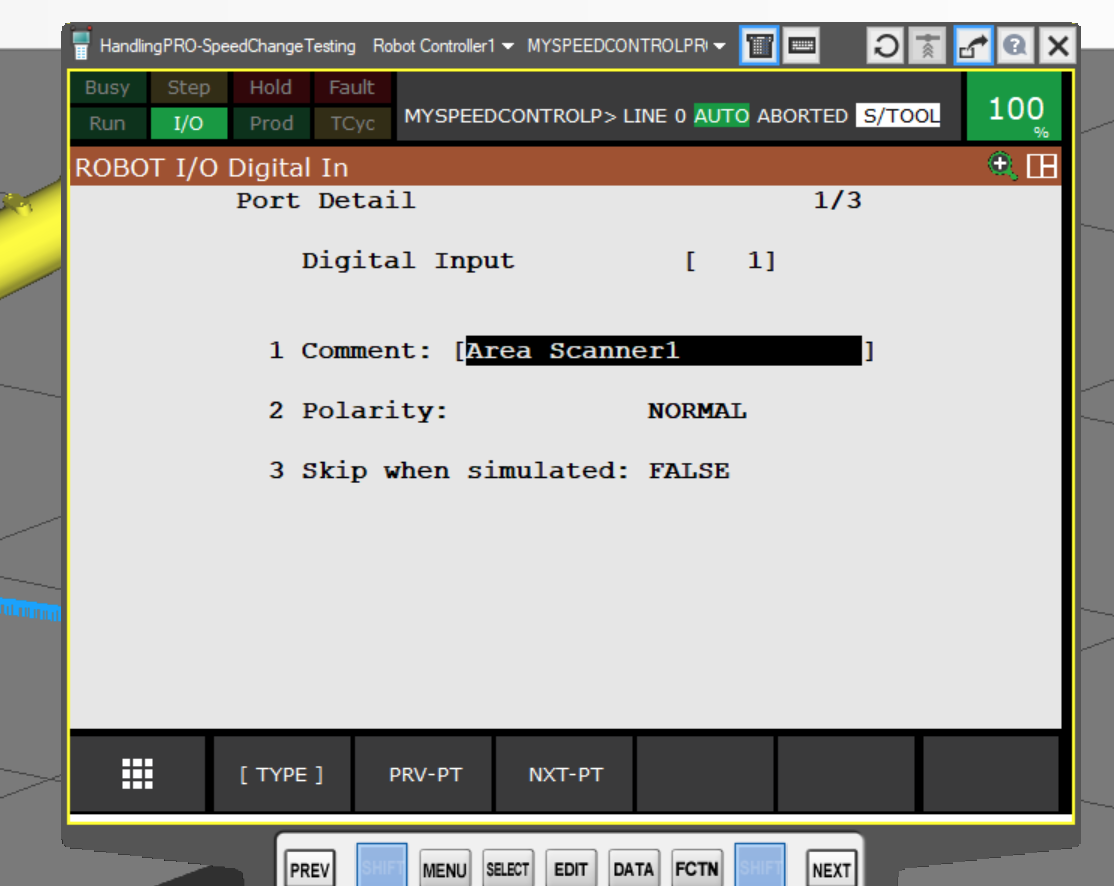
1 Commentのところにコメントを入れましょう。
ここでArea Scanner1にします。
次はNXT-PTボタンをクリックしDI1からDI2に移動します。
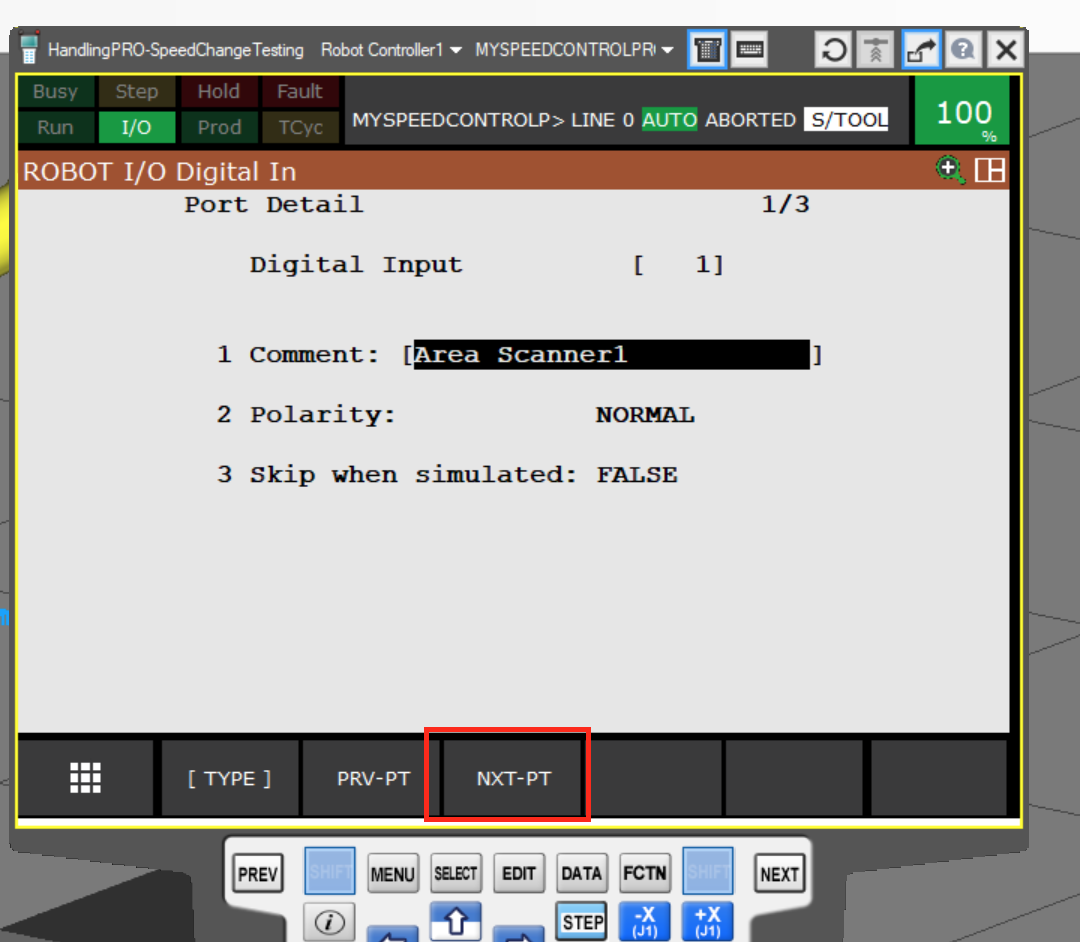
DI2はArea Scanner2を入れます。

このように設定しました。
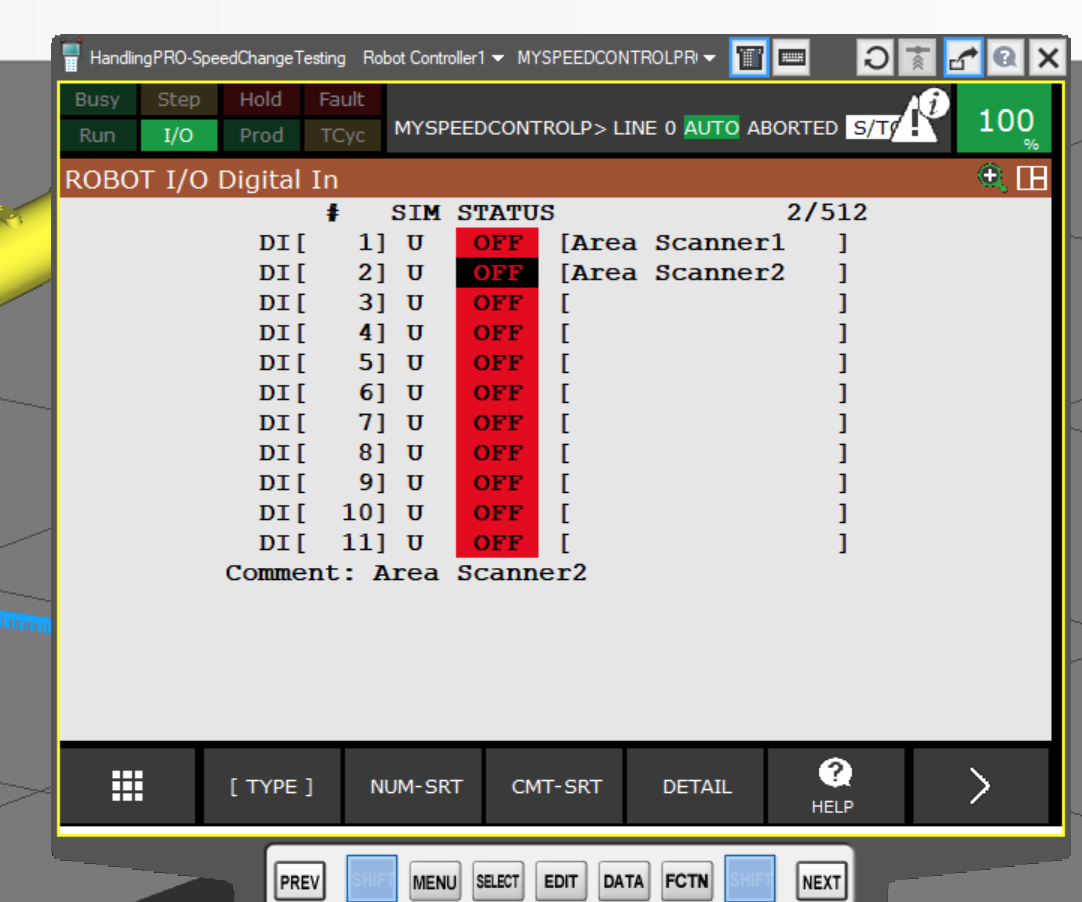
そのDI1とDI2は実際になにもつながっていませんので、シミュレーションできるように設定します。DI [1]を選び、SIMULATEボタンをクリックします。
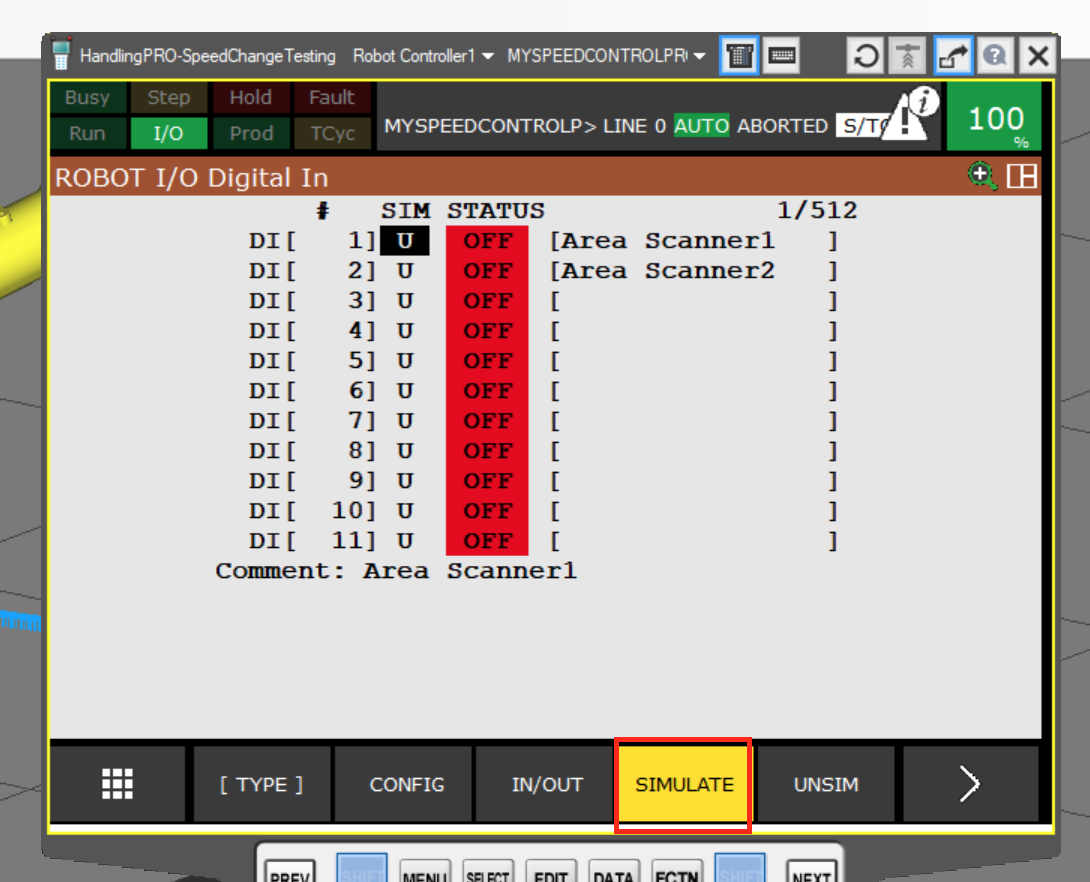
そうすると、DI[1]のときのアルファベットがUからSに変わります。
DI2も同じの設定しましょう。

SETUP-Ovrd Select
次は実際Speed Overrideのところを設定します。
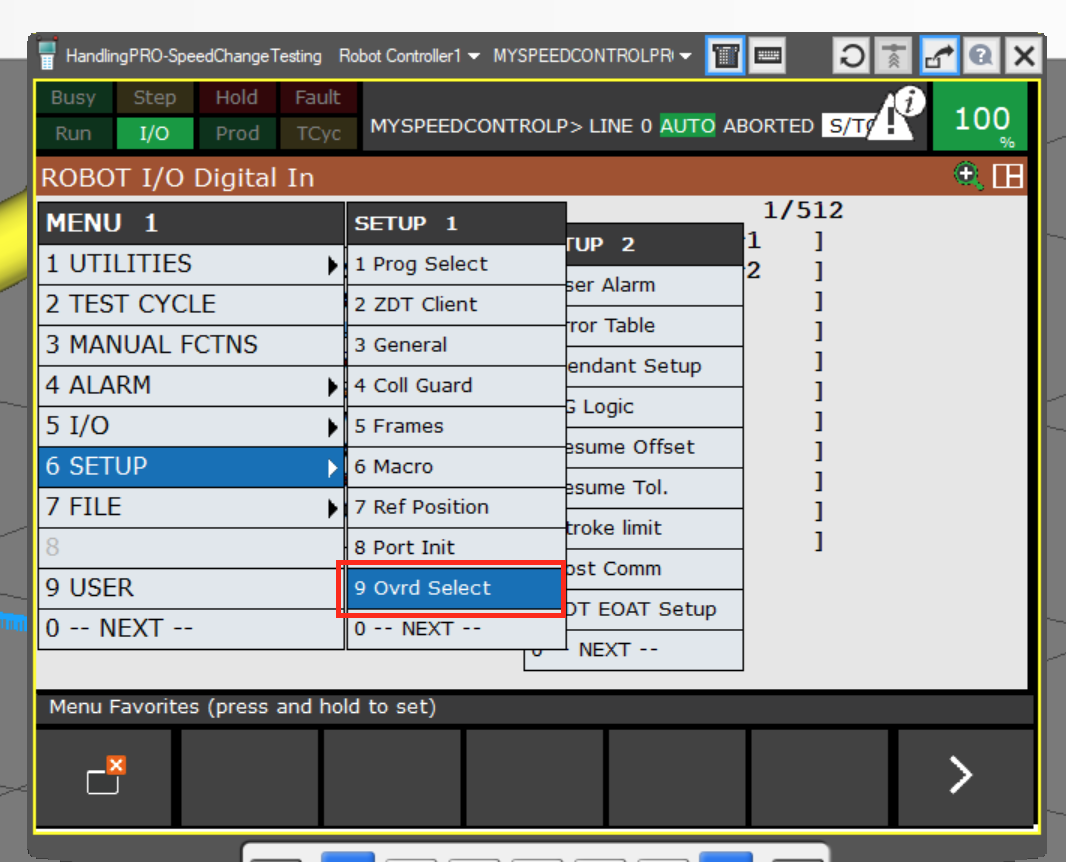
SETUP>Ovrd Selectをクリックします。
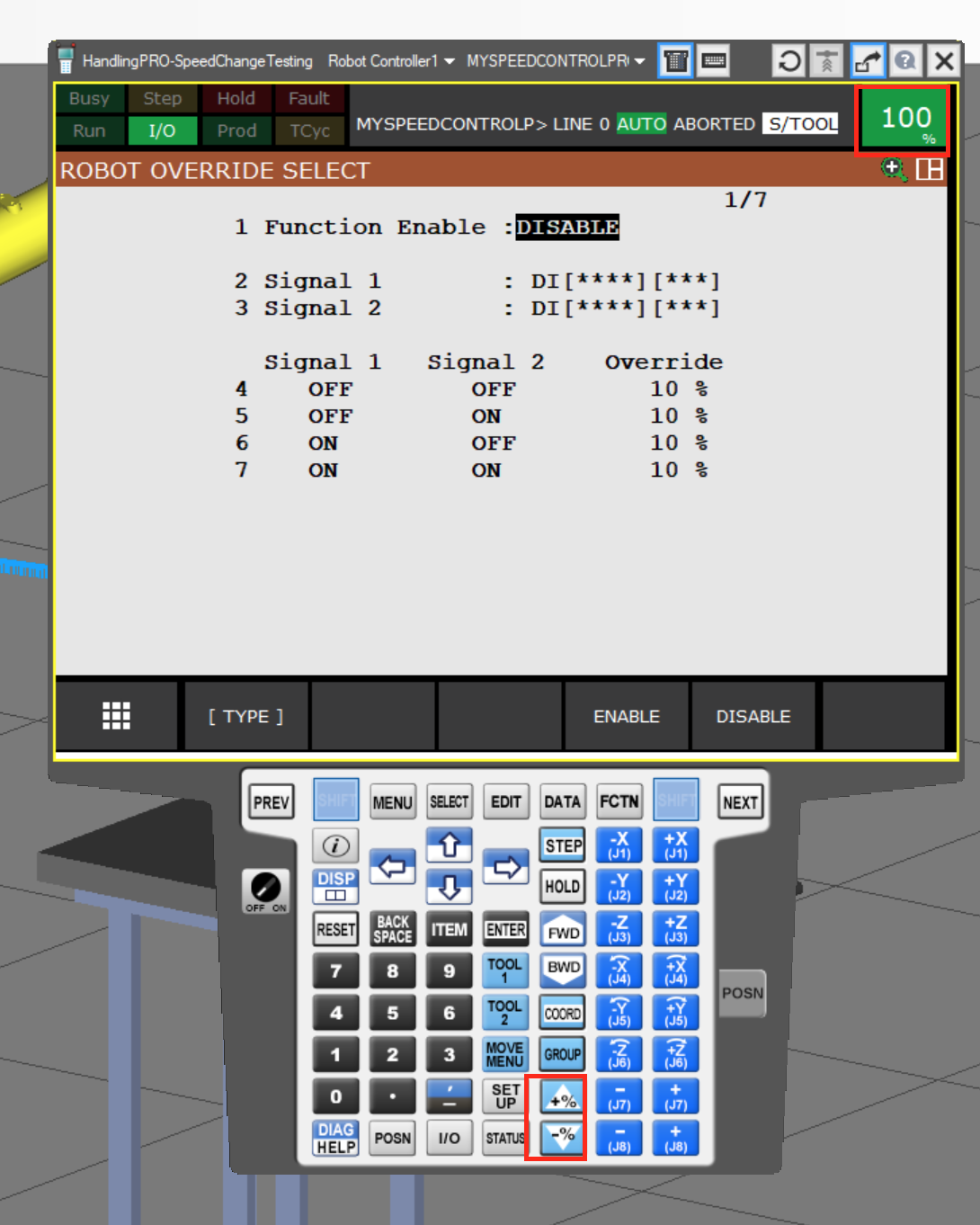
このような画面が出てきます。ここで機能を有効するかどうか・信号を何番するか・速度のOverride%は何%するかを設定できます。

本来、Teach pendantから+・ーから右上の100%速度を変更するができすが、いまはDIから制御しようと考えていますね。
まずSignal 1とSignal 2を先Comment入れたのDI1とDI2に入れます。
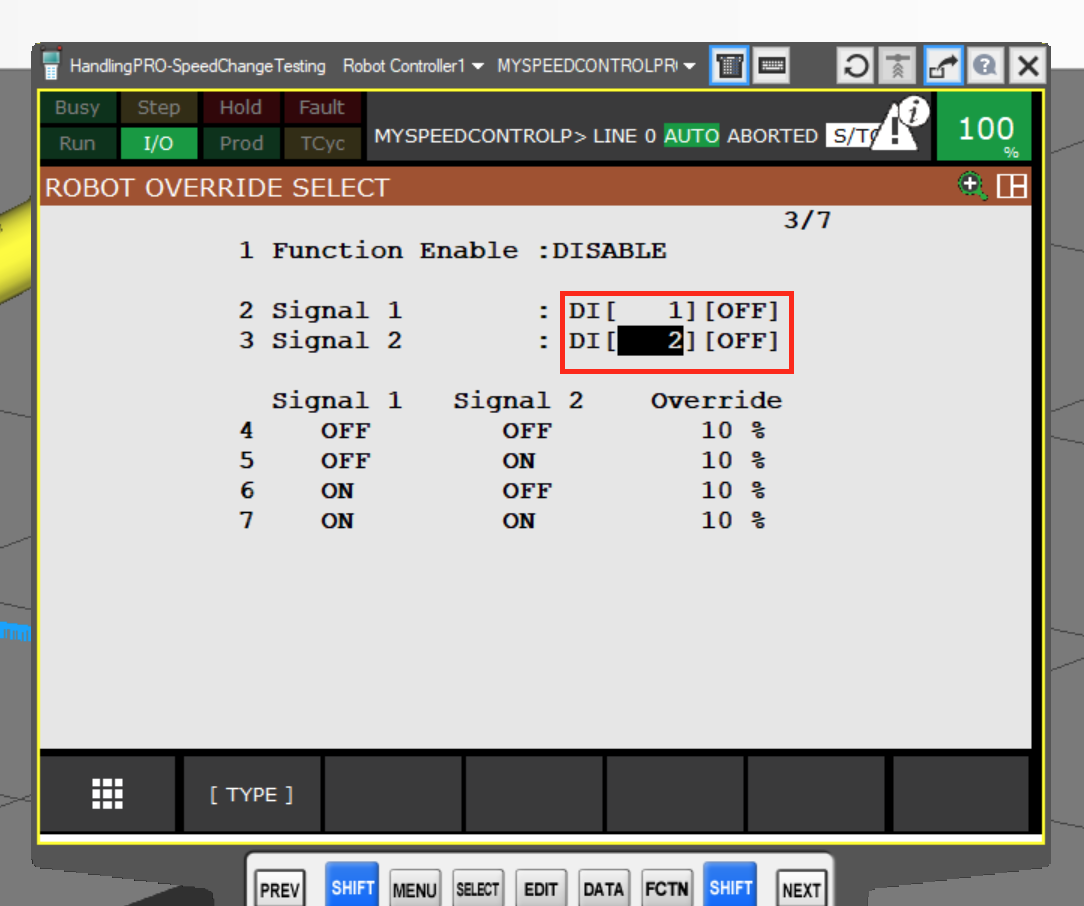
2画面に分割し、DI1をONしてDI[1][ON]になってるかどうかを割付で確認します。
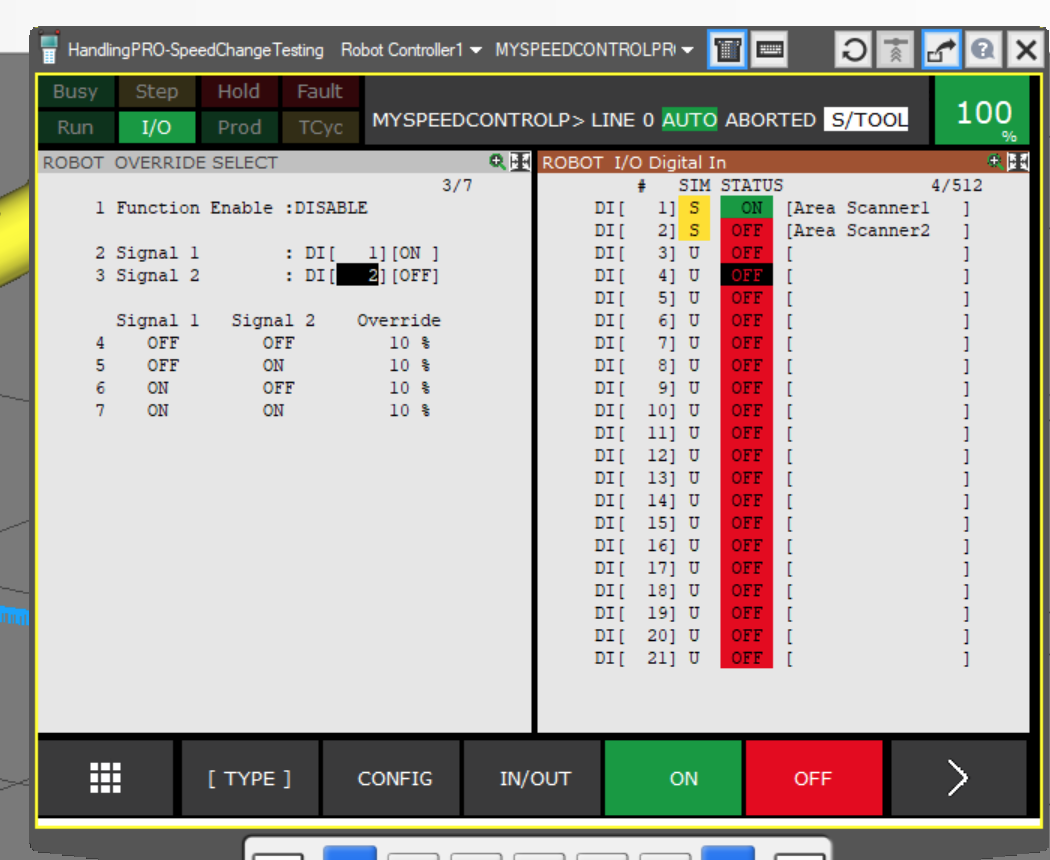
今度はSignalのPatternによってOverrideの%を設定します。
OFF OFF=100%
OFF On=70%のようにアプリケーションに合わせましょう。

最後はEnableします。
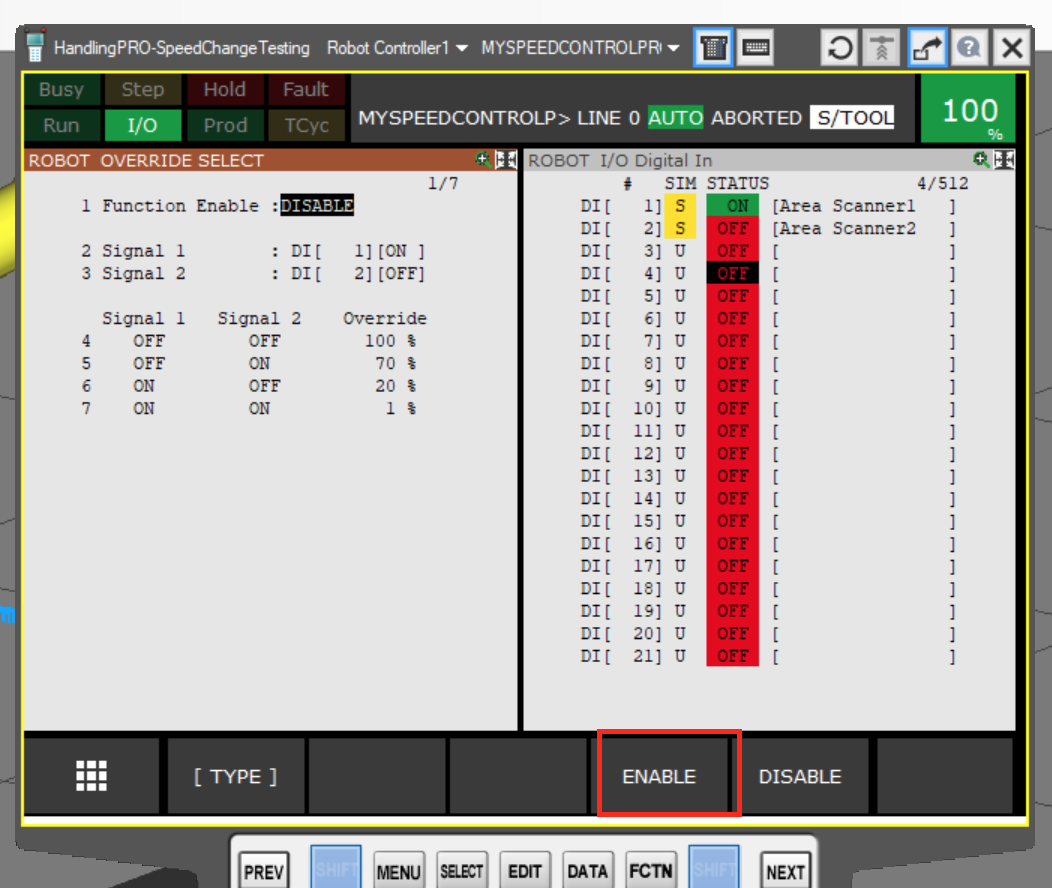
よし、それでOKです。

結果
DI SignalのPatternによってSpeedは変化できるようになりましたね。
はーい、お疲れ様ーです。
このシリーズではFANUCのロボットとROBOGUIDEを使用について勉強用のメモになります。あくまでも個人的書いてたものなので、実際使うときには安全を注意し、経験あるエンジニアと一緒に作業してくださいね。