USER ALARMは画面の一番上もしくはTeaching Pendantの上に表示されている自分で定義できるメッセージになります。
そのUSER ALARMを使用すれば、オペレーターにロボットの状態をお知らせしたり、ロボットを一時停止したり、ロボットプログラムを中止したりすることもできます。
さ、はじめよう!
ALARM?
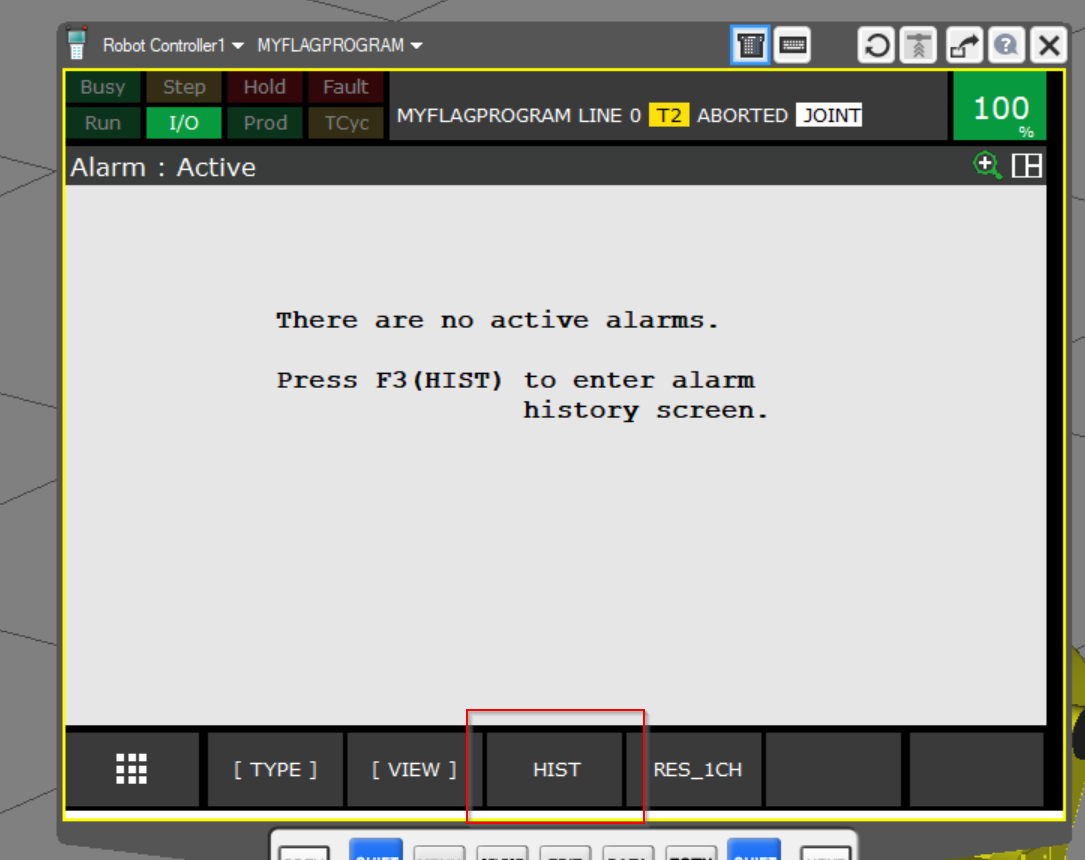
USER ALARMを設定する前に、まずロボットのALARMをどう確認するかを見てみましょう。4 ALARM>1 Alarm Logをクリックします。
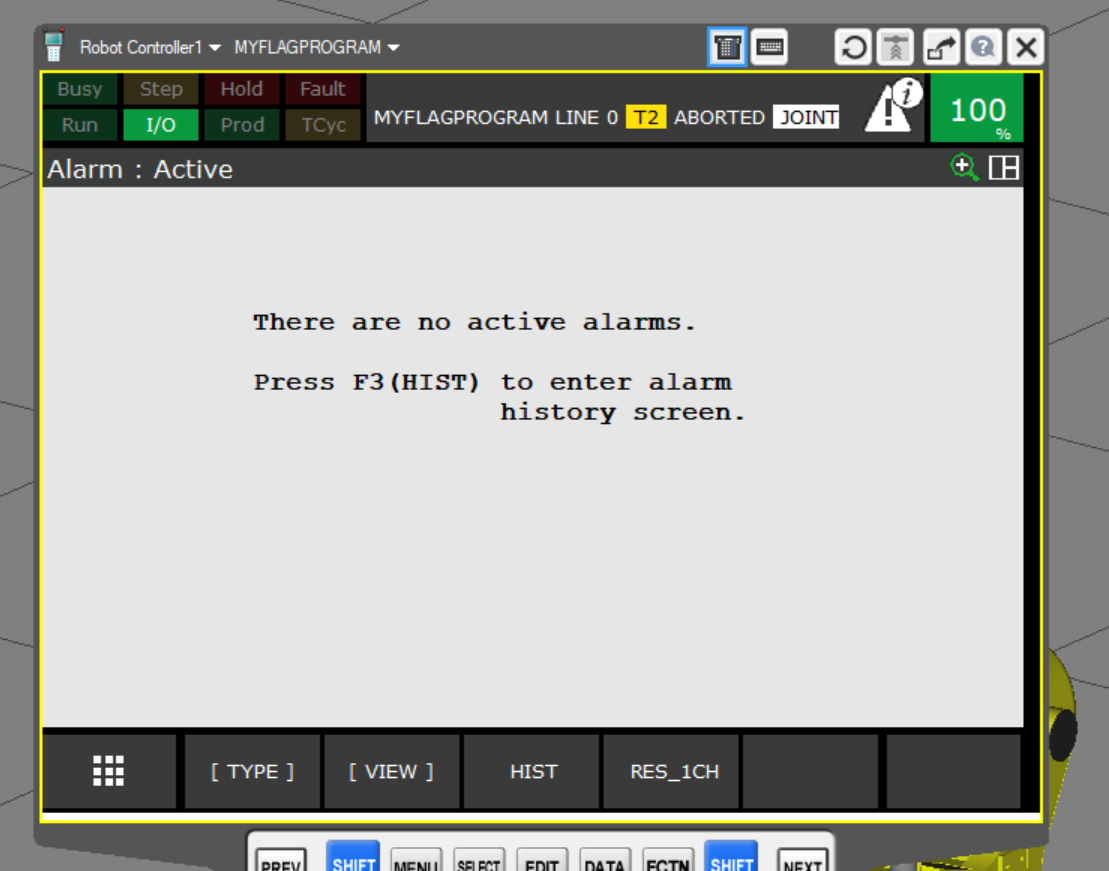
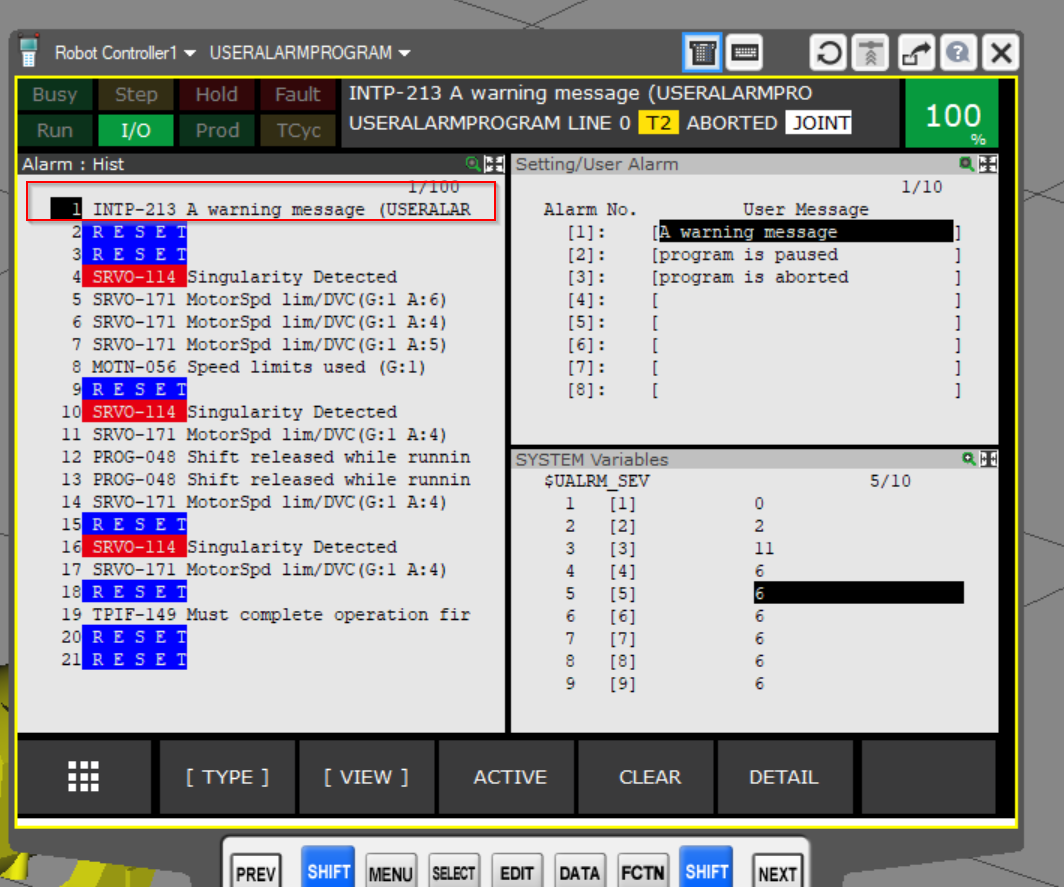
こちらは現在発生中のアラーム一覧画面になります。
HISTボタンをクリックするとアラーム履歴が表示されます。
こちらはいままで発生したアラーム履歴を一覧できます。
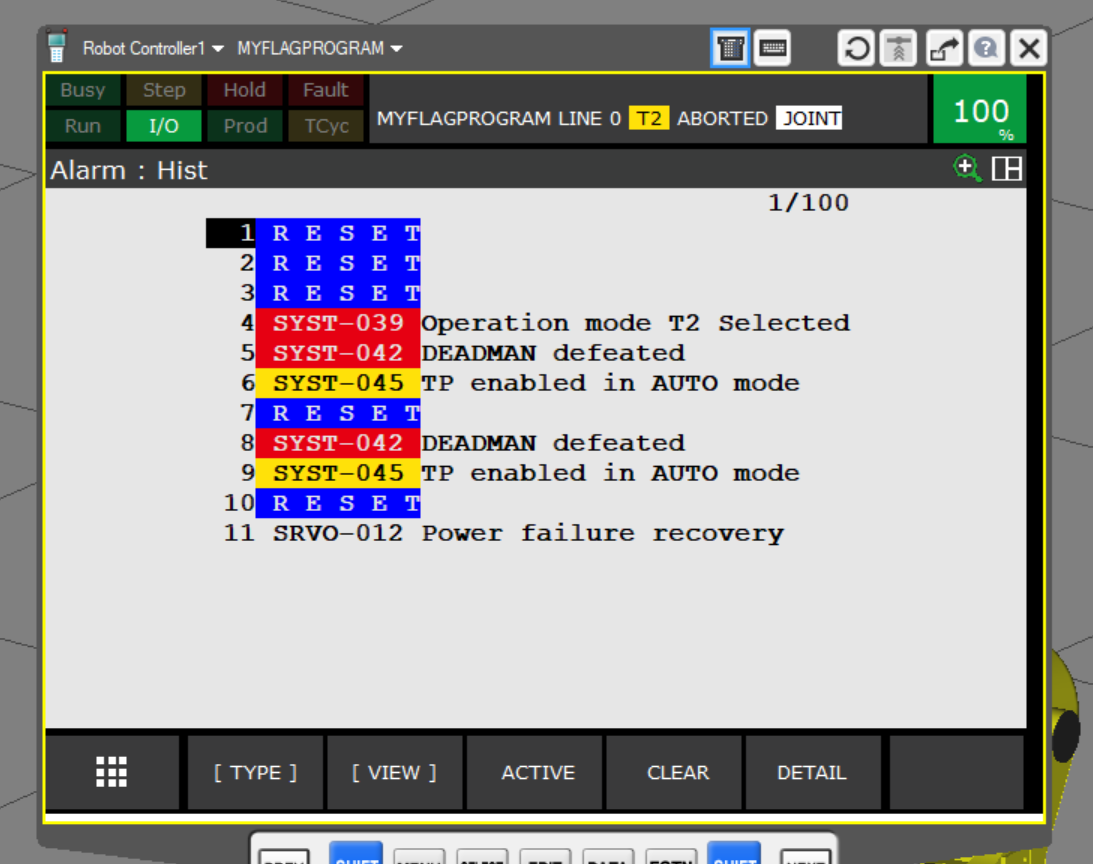
下図のように、RESETボタンをクリックするとアラーム履歴も一緒に更新するようになります。
Configuration
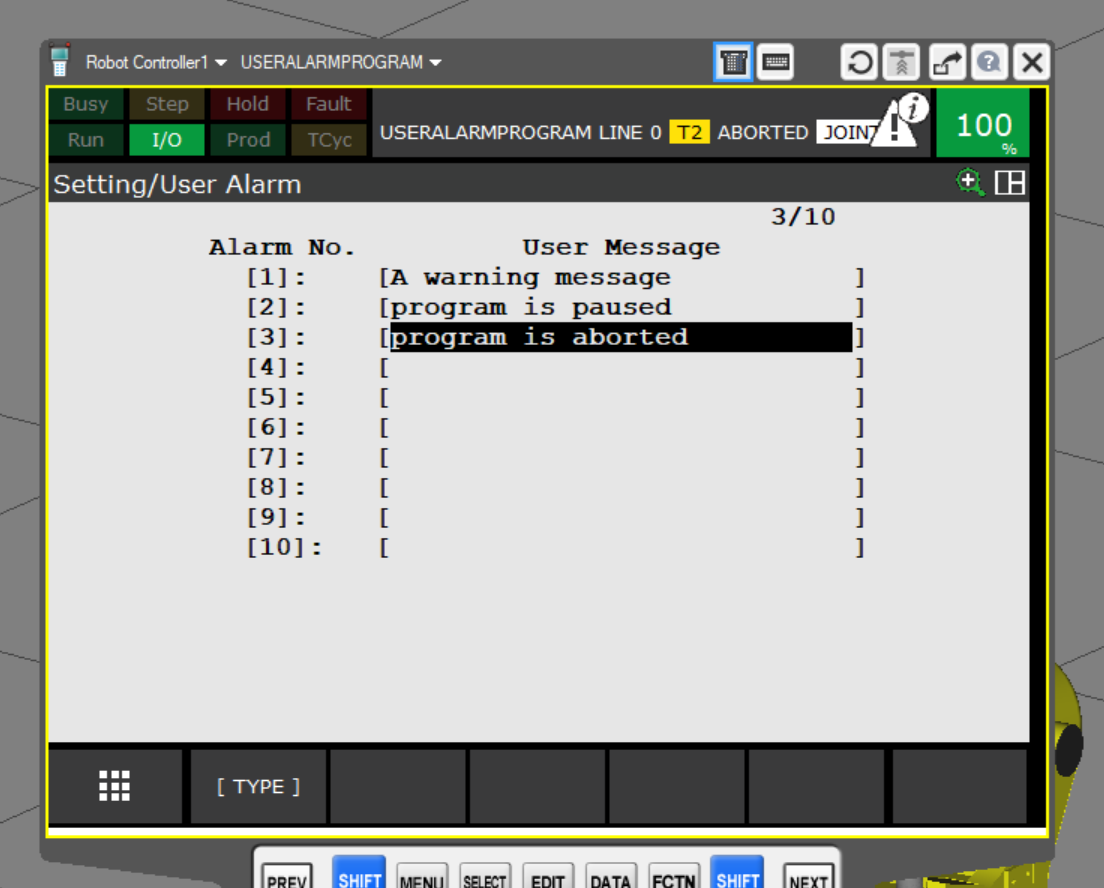
次はUSER ALARMの構築方法を説明します。6 SETUP>9 User Alarmを開きます。
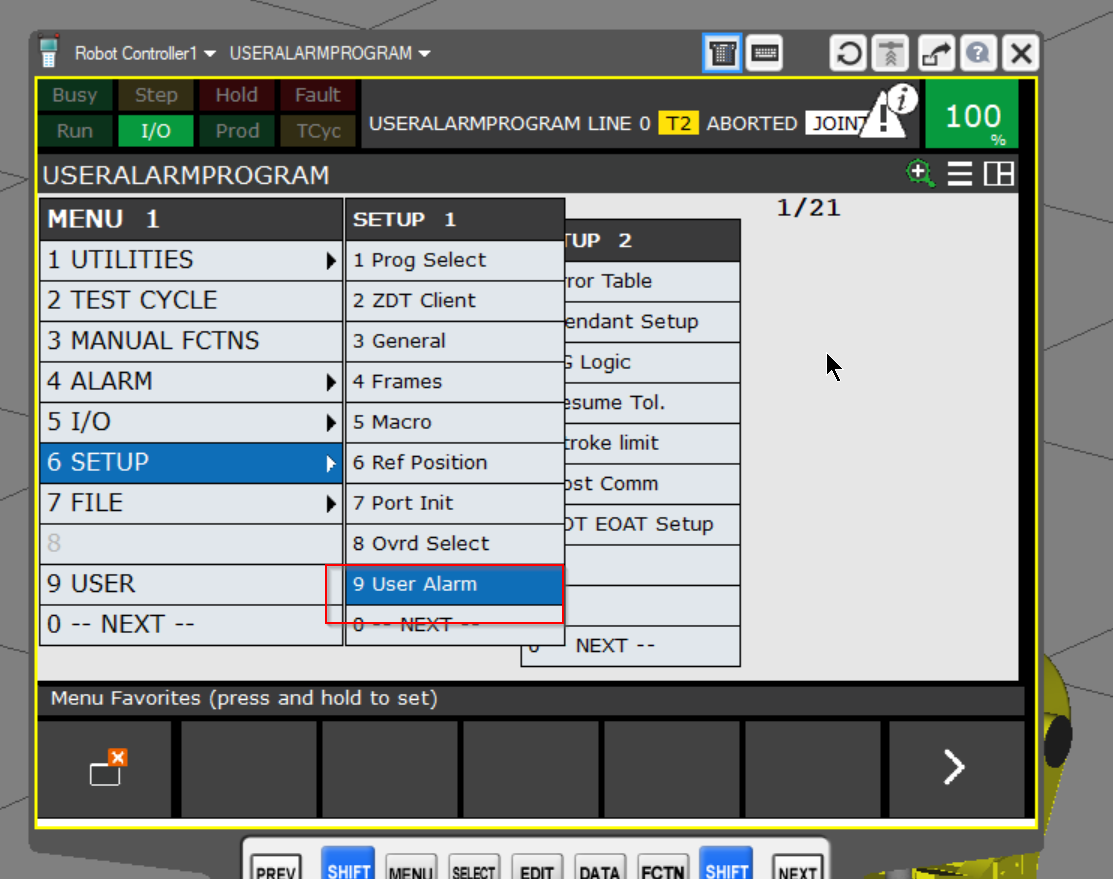
User Alarmの設定画面が表示されます。
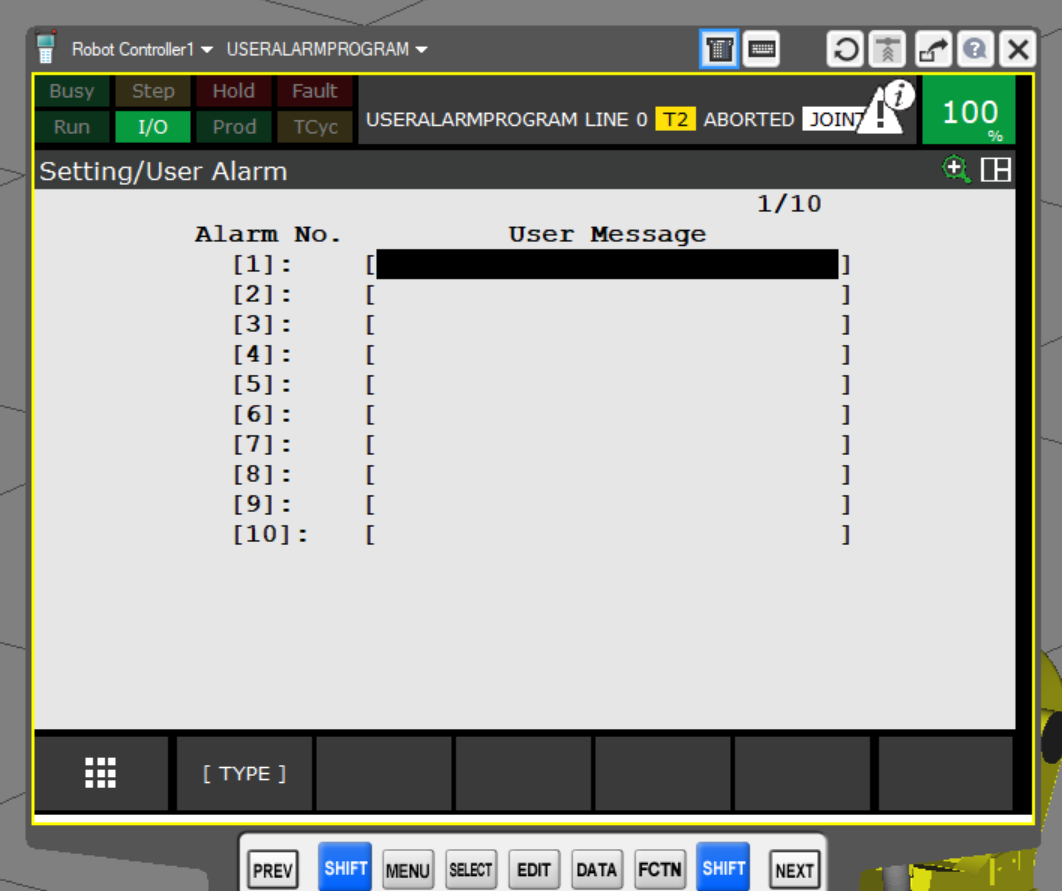
User Messageでアラームが発生したときの表示文字を設定します。
次は各User Alarmが発生したときロボットの動作を設定するため、6 SYSTEM>2 Variablesを開きます。

$UALRM_SEVの変数を開きます。(変数番号は機種やOptionsの数によって変わりますので)

$UALRM_SEVの設定画面が表示され、$UALARM_SEVの隣に”6”という数字があります。
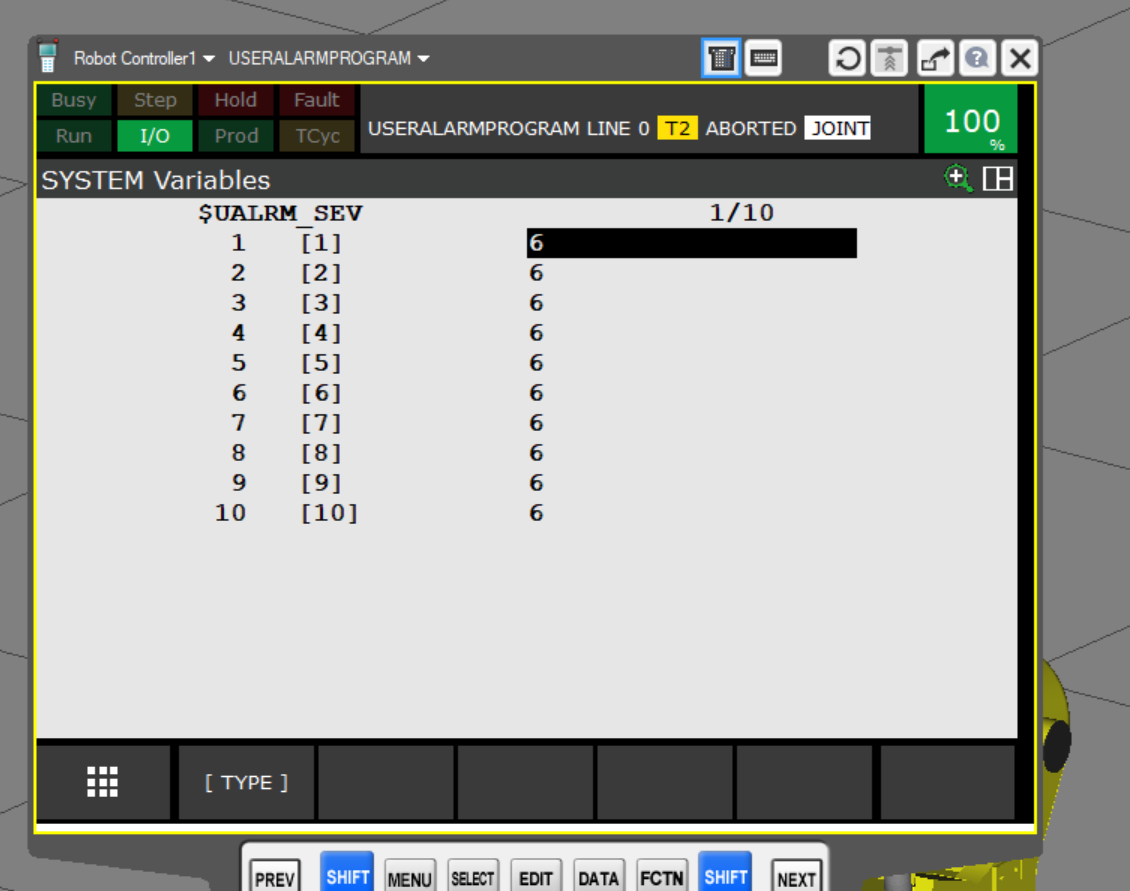
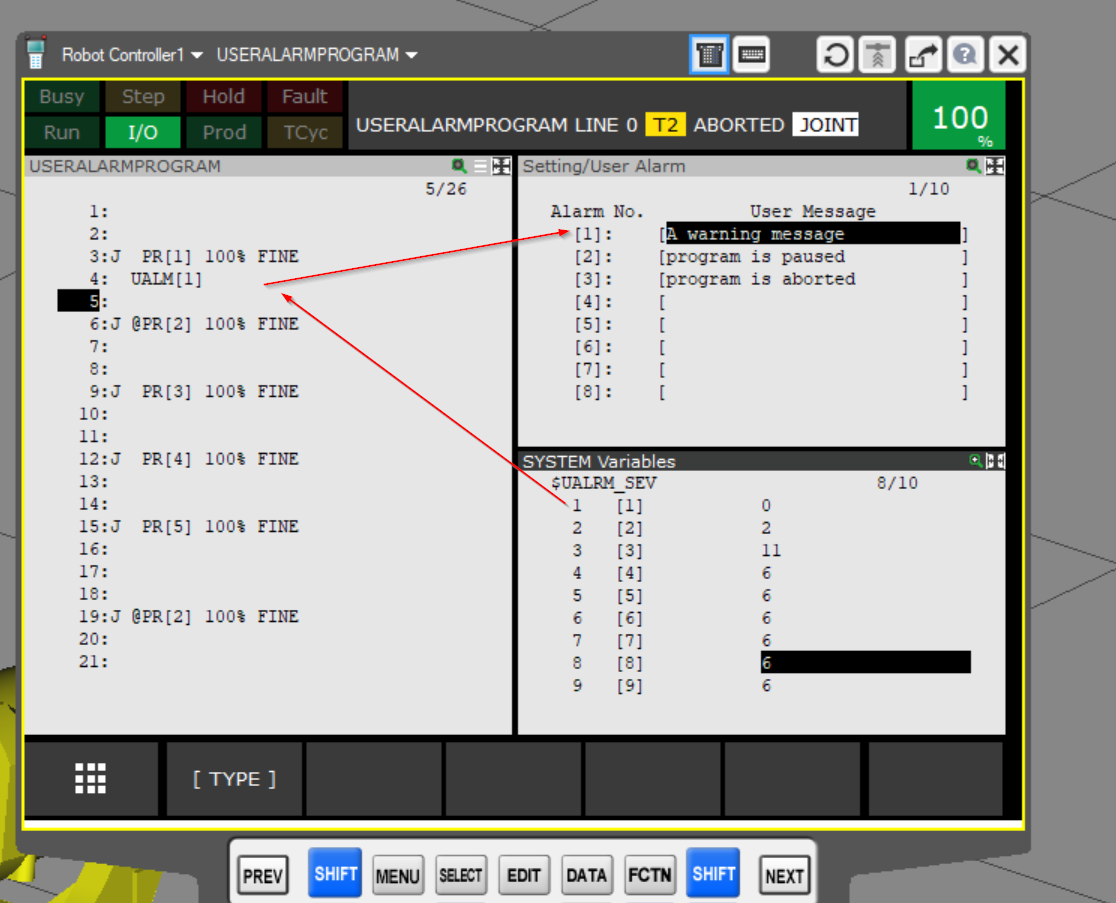
$UALARM_SEV1はUser AlarmのAlarm No.[1]、$UALARM_SEV2はUser AlarmのAlarm No.[2]に該当します。
6という数字はアラームの重度を表しています。
- 0=動作なし、Warningのみ
- 2=プログラム一時停止
- 3=エラー発生、プログラム中断
- 4=プログラムのMotion停止
- 6=プログラム一時停止、Motion停止
- 11=エラー発生、プログラム中断。Motion停止
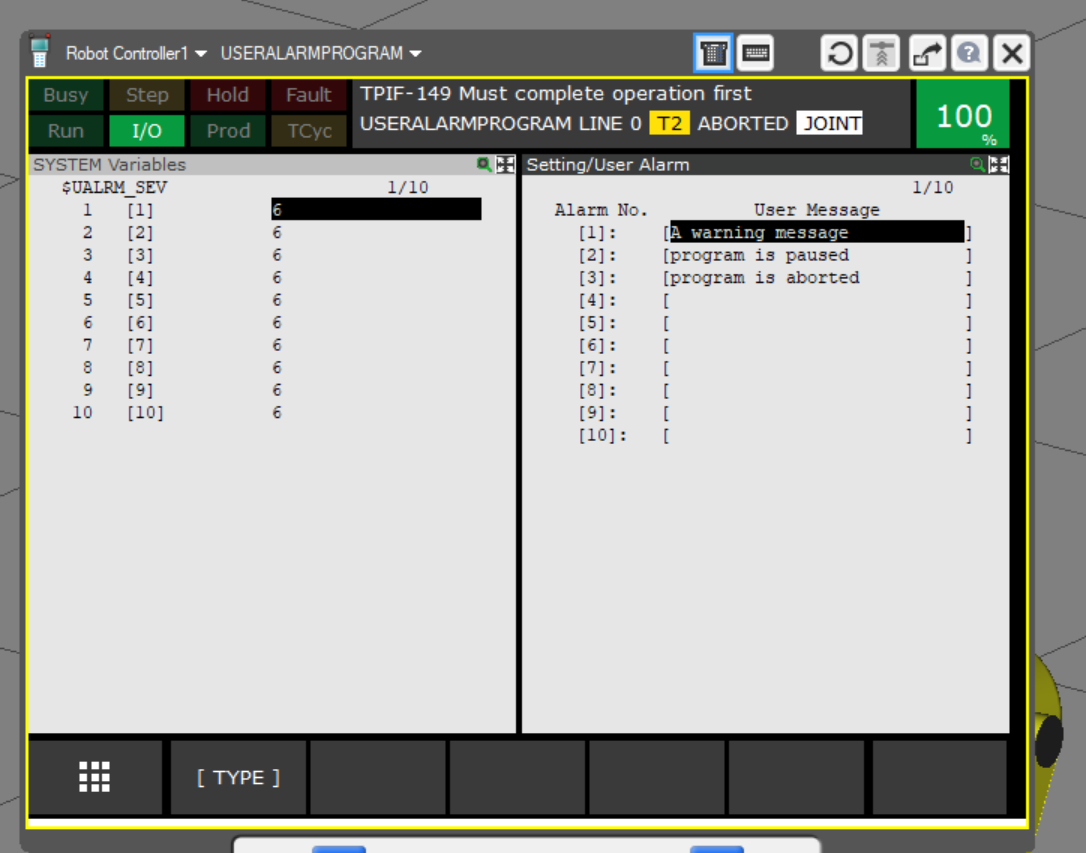
なので、左にある$UALRM_SEVの[1],[2],[3]は、右画面にあるAlarm No.[1],[2],[3]に該当します。

Implementation1 User Alarm-Warning
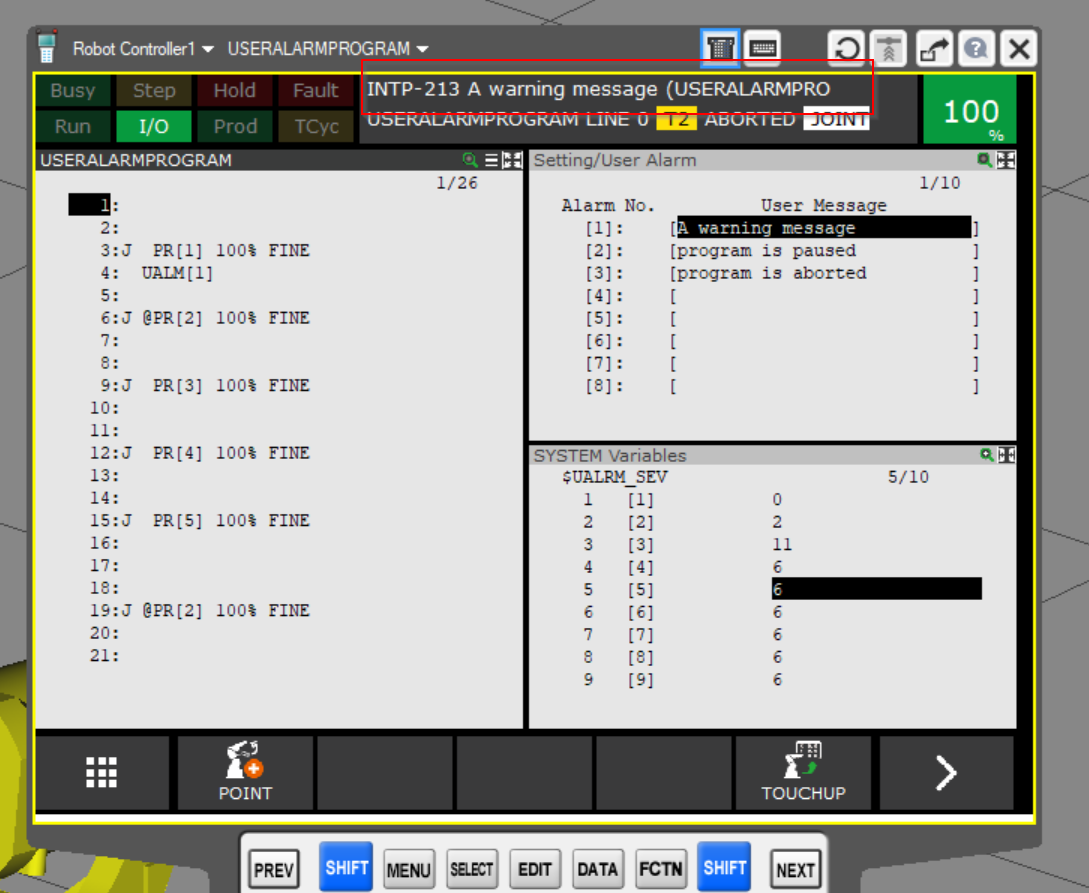
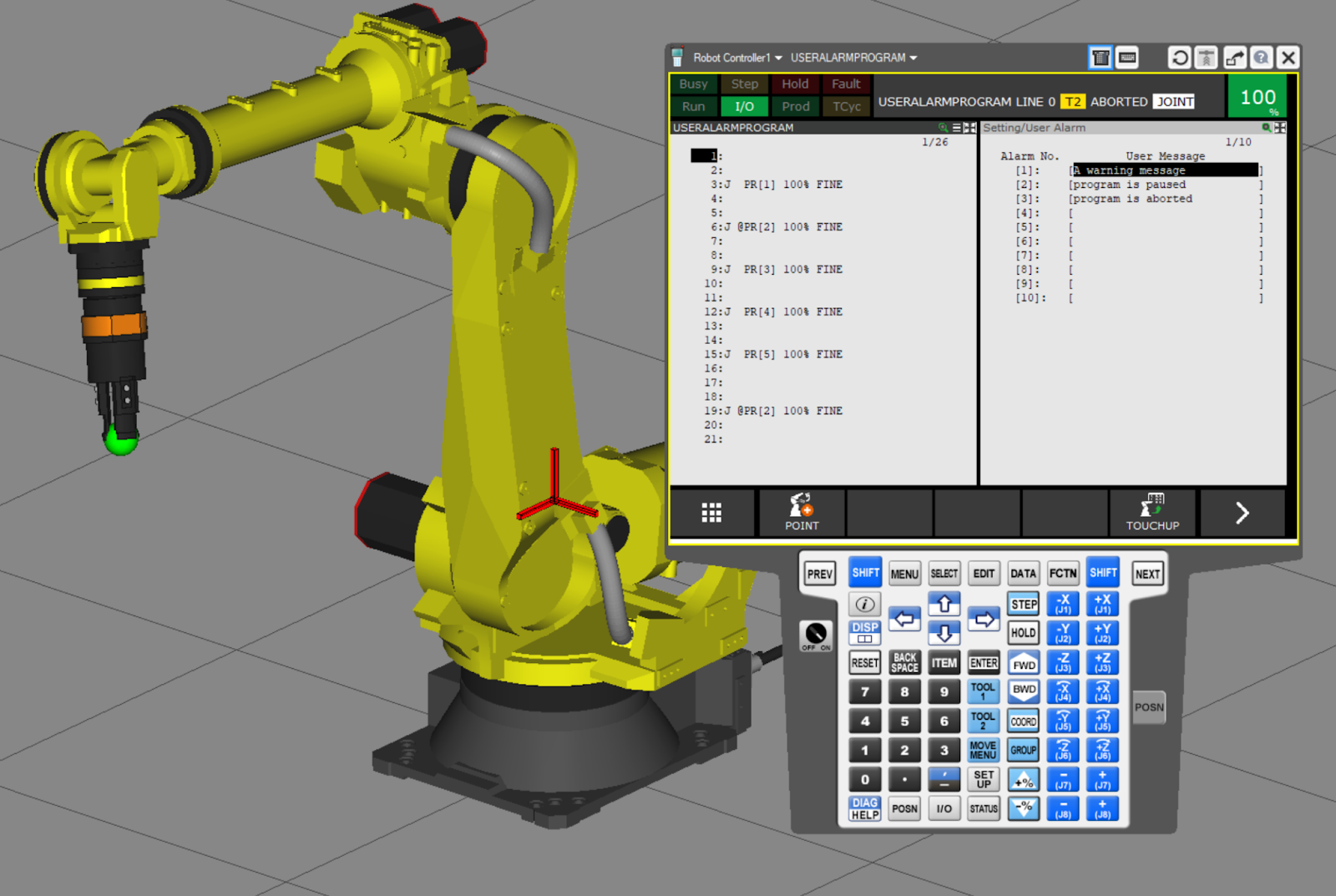
まずWarning ClassのUser Alarmをテストしてみましょう。下図のように、プログラム26というUSERALARMPROGRAMを作成し、ロボットプログラムを実行します。

こちらはUSERALARMPROGRAMの中身です。
実際ロボットプログラムの動きは下図のようになります。
Warning classのアラームをロボットプログラムに追加するため、7 Miscellaneousを開きます。

次はUALRM[ ]を挿入します。

いまロボットプログラムのLine4でUALM[1]が追加されており、つまりAlarm No. [1]になります。

そしてUALRM[1]は番号0なので、先程も書きましたが、0は動作無し、Warningのみの意味になります。
- 0=動作なし、Warningのみ
- 2=プログラム一時停止
- 3=エラー発生、プログラム中断
- 4=プログラムのMotion停止
- 6=プログラム一時停止、Motion停止
- 11=エラー発生、プログラム中断。Motion停止
Done!実際ロボットがLine4を実行するとTeaching Pendantの上にWanring Messageが表示されるようになりました。
こちらは実際の動作になります。
アラーム履歴にも先程発生したWarningが記載されました。
Implementation2 User Alarm-Program Pause
次はProgram Pause ClassのUser Alarmをトリガーしてみます。ロボットプログラムのLine9にUALRM[2]を追加します。UALRM[2]は番号2なので、先程も書きましたが、2=プログラム一時停止になります。
- 0=動作なし、Warningのみ
- 2=プログラム一時停止
- 3=エラー発生、プログラム中断
- 4=プログラムのMotion停止
- 6=プログラム一時停止、Motion停止
- 11=エラー発生、プログラム中断。Motion停止
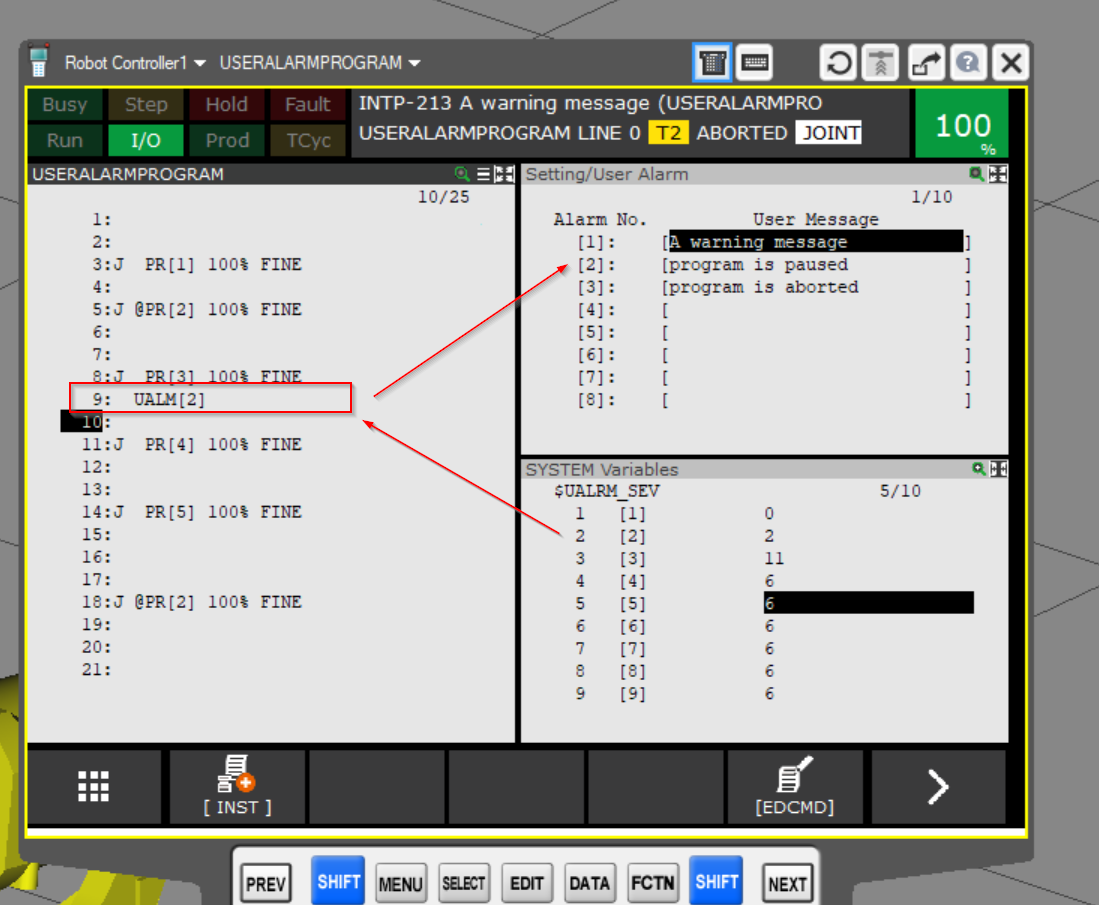
Done!ロボットプログラムはLine9になるとUALRM[2]がトリガーされ、一時停止になります。
実際ロボットがLine9を実行するとTeaching Pendantの上にFault Messageが表示されるようになりました。
ROBOGUIDE上でプログラムはまだSTOPになってないこともわかります。
Implementation3 User Alarm-Program Stop
最後はProgram Stop ClassのUser Alarmをトリガーしてみます。ロボットプログラムのLine10にUALRM[3]を追加します。UALRM[2]は番号11なので、先程も書きましたが、11=エラー発生、プログラム中断。Motion停止になります。
- 0=動作なし、Warningのみ
- 2=プログラム一時停止
- 3=エラー発生、プログラム中断
- 4=プログラムのMotion停止
- 6=プログラム一時停止、Motion停止
- 11=エラー発生、プログラム中断。Motion停止
下図のように、実際ロボットがLine10を実行するとTeaching Pendantの上にFault Messageが表示されるようになりました。
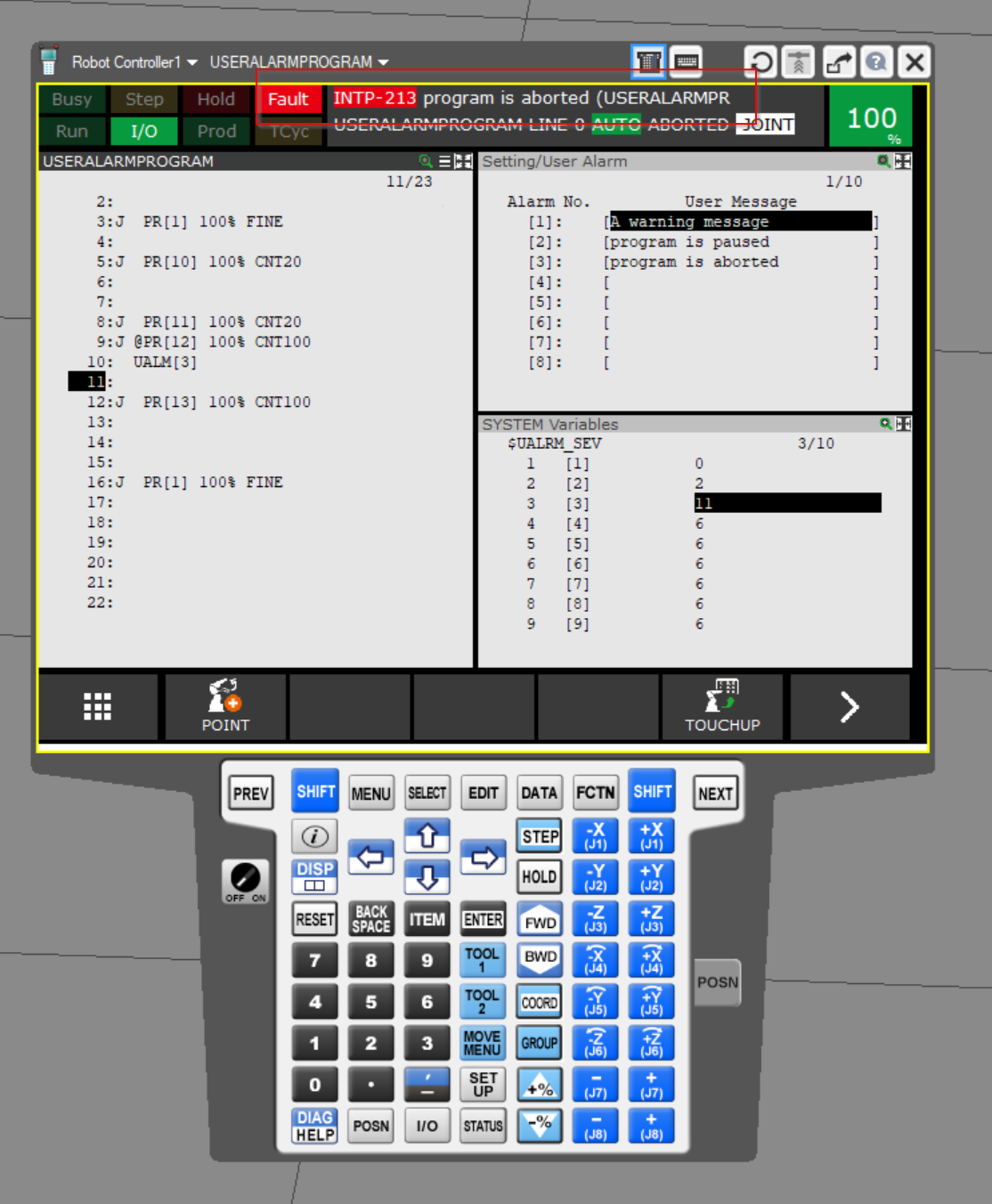
Done!実際UALRM[3]がTriggerされたら、プログラムはもう中断されました。