このシリーズはTwinCAT3でDriveの構成・プログラムの組み方などを書きます!
EtherCAT Master追加
I/O Devices>Add New Itemします。

EtherCAT>EtherCAT Masterを選びます。

Ek1200-5000 Power Supply
いまはEtherCAT Master追加しました。
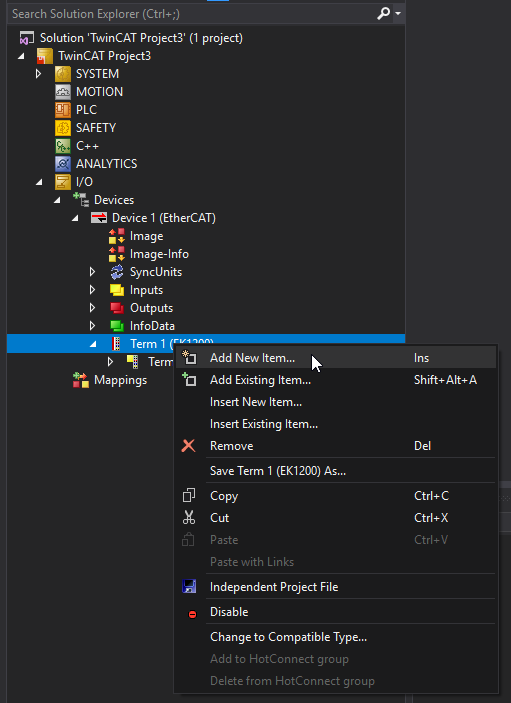
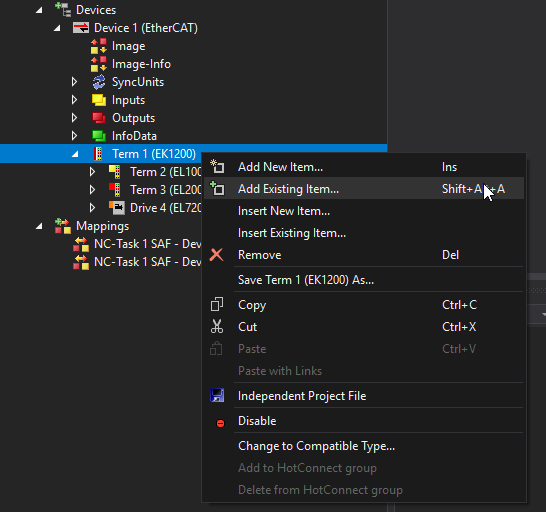
そのMasterにAdd New Itemをクリックします。

Ek1200-5000 Power Supply を追加します。

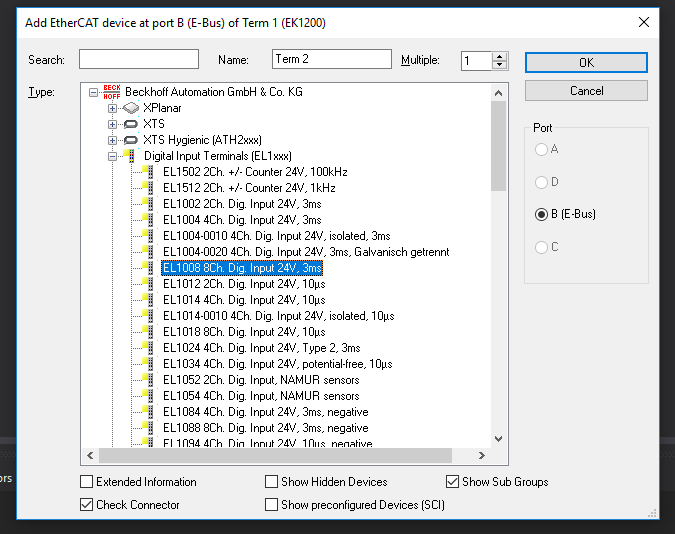
EL1008入力モジュール
Term1 EK1200が追加されました。
またAdd New Itemします。

入力モジュールEL1008を追加します。
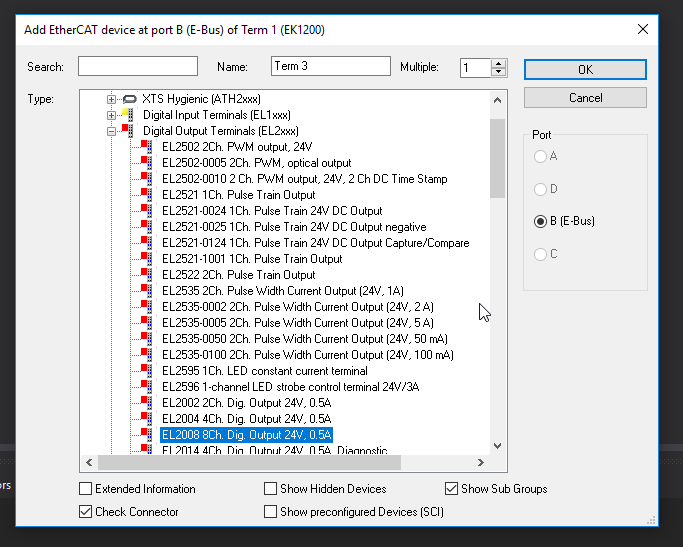
EL2008出力モジュール
Term2が追加されました。
Add New Itemします。
出力モジュールEL2008を追加します。
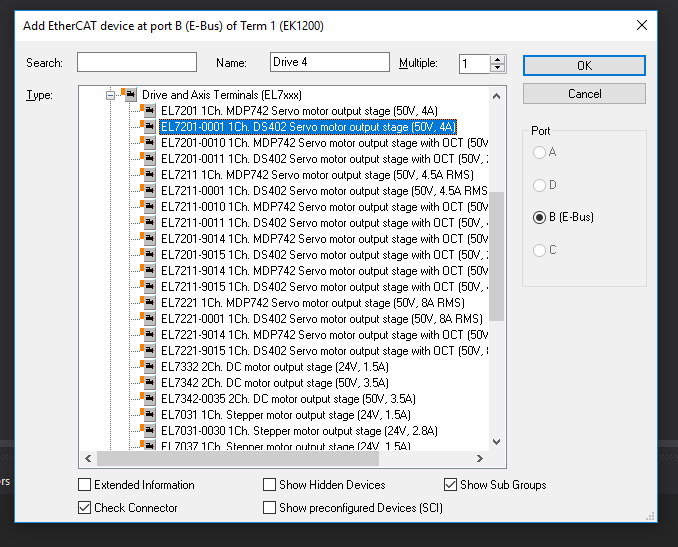
EL7201-0001 Drive
Term3追加されました。
Add New Item します。

Drive and Axis Terminals>EL7201-0001を追加します。
NCとCNCが選びますが、NCを選択しOK。
Axisを追加されたら、MOTIONが勝手に軸が追加されます。

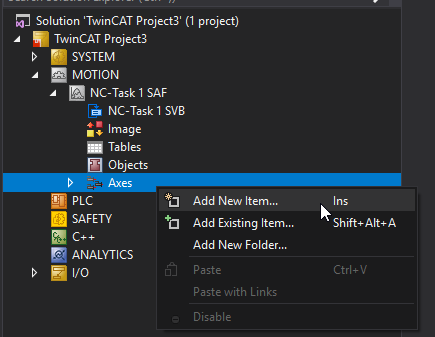
そこで、AxesでAdd New Itemを追加してみます。
そこでNameがAxis 2ですね。

Axesをクリックし、Settingsで、Link to IOみたら先追加したDriveと同じな名前ですね。
つまり先の作業だと大体なものも自動設定してくれます。
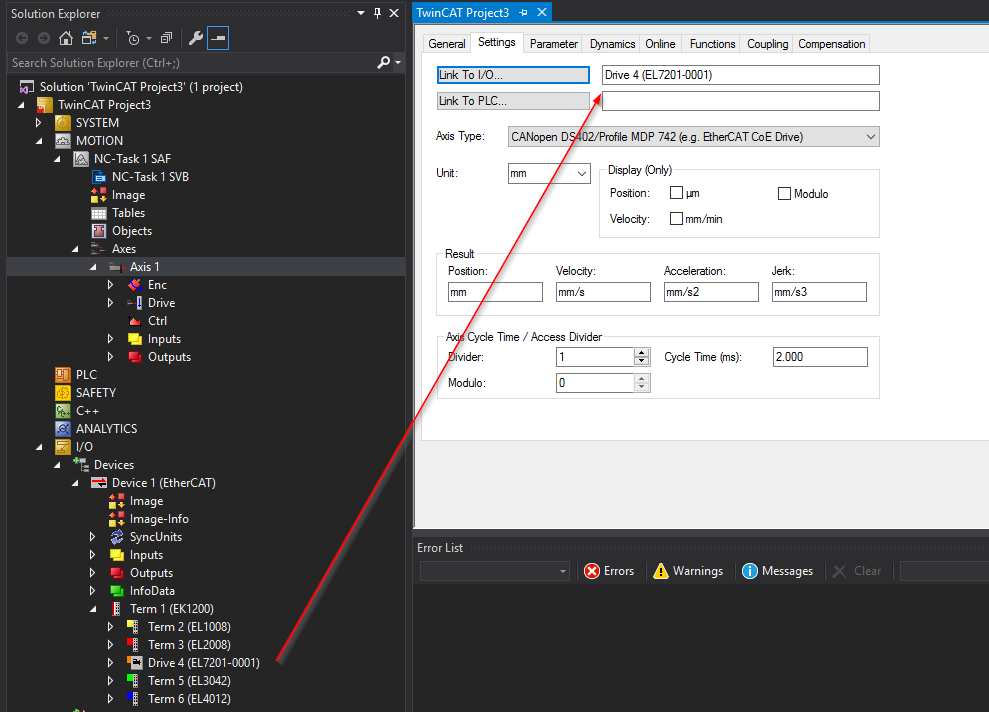
Link to I/Oをクリックし、Popupでみたら更に詳しくみえます。

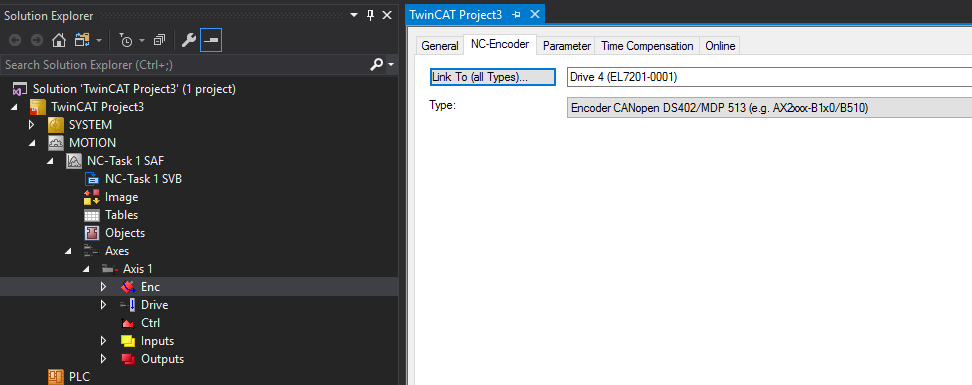
EncをクリックしてNC EncoderのTabみたらEncoderも自動設定してされます。
EL3042 Analog Inputモジュール
Drive追加されたあと、またAdd New Itemします。
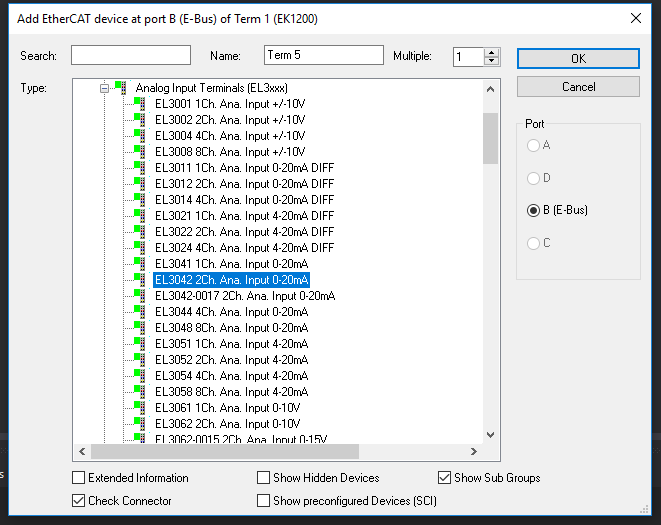
Analog InputモジュールEL3042追加します。
EL4012 Analog Outputモジュール
Term5が追加されました。
またAdd New Itemします。

Analog Output モジュールEL4012を追加します。
それでOKです。

EtherCAT Master無効
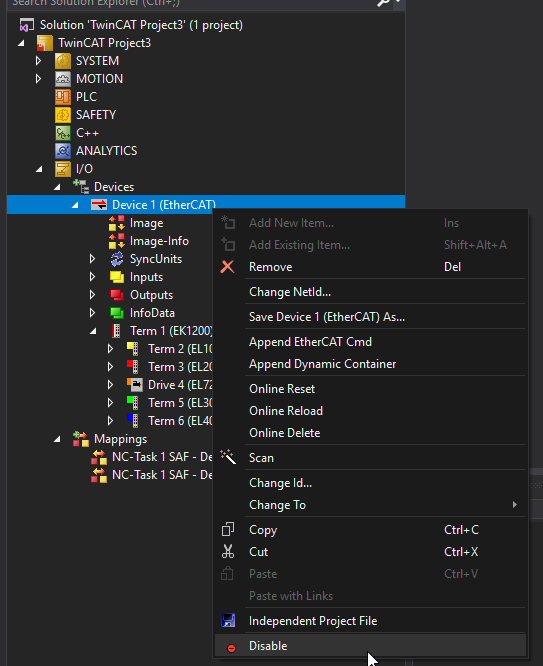
Device 1で右クリック>Disable
ライセンス
次はライセンスを設定します。
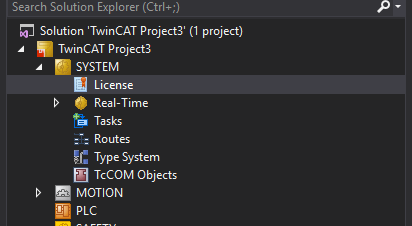
SYSTEM>License
TF5000のMotionライセンスがないですね。(Missingって書いています)
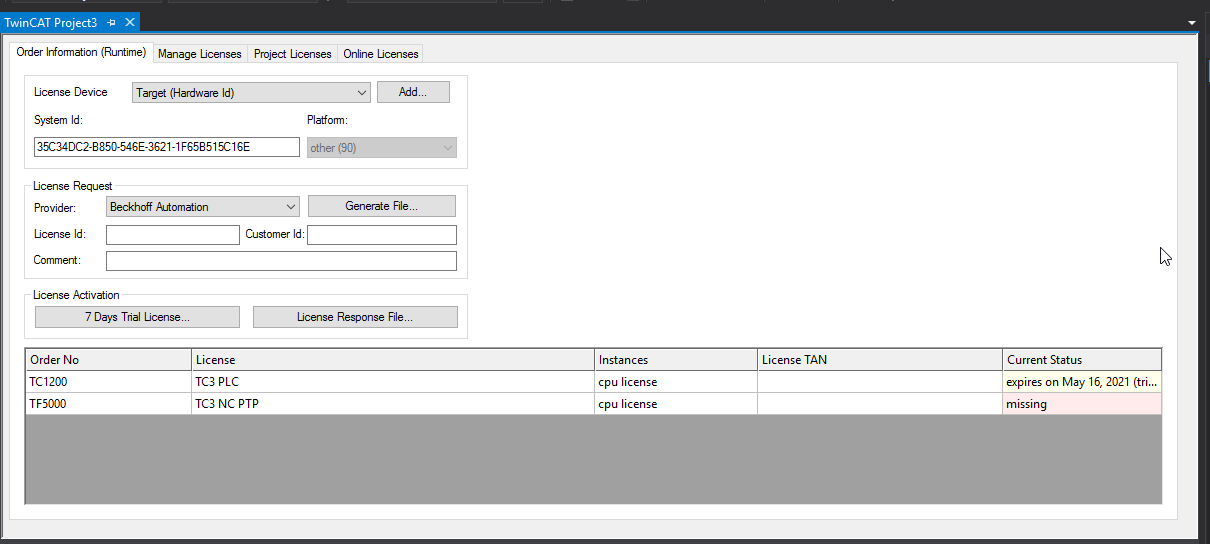
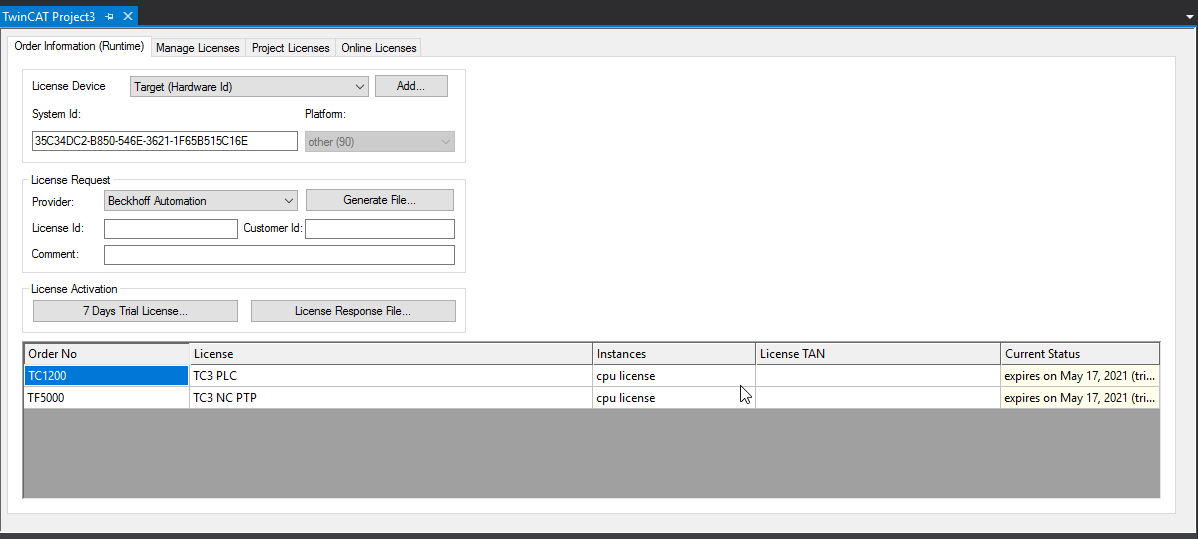
7Days Trial Licenseをクリックし、試しライセンスKeyを入れます。

よし、試しライセンスOK。
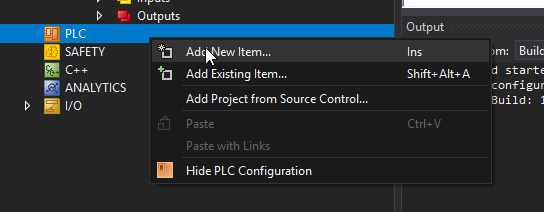
PLC追加
PLC>Add New Itemします。
Real-Time設定
次はReal-Time クリックしでCoreを設定します。

Read the Targetします。
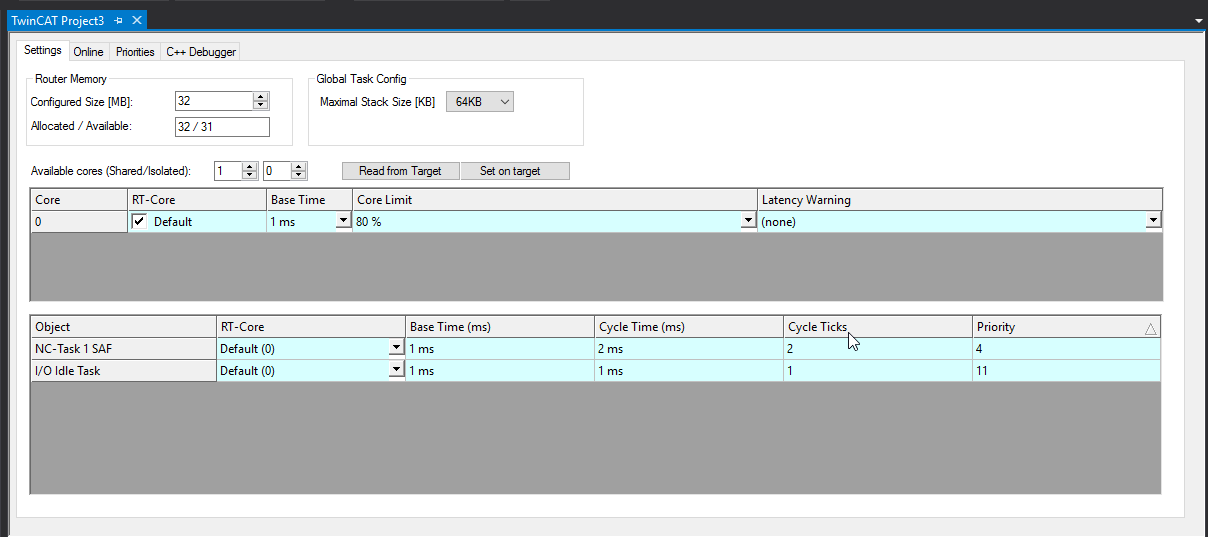
Coreを選び、Set on Tagetします。
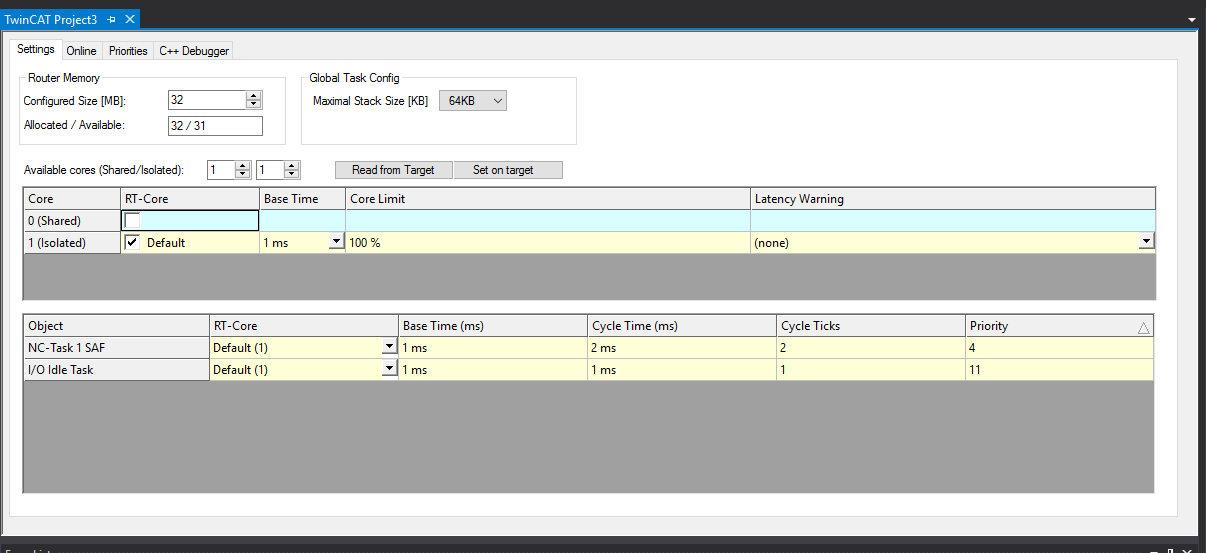
一回Buildして、エラーない、ですね。

仮想軸追加
ハードウエアが持っていないので、仮想軸でプログラムを作ろうかなと思っています。
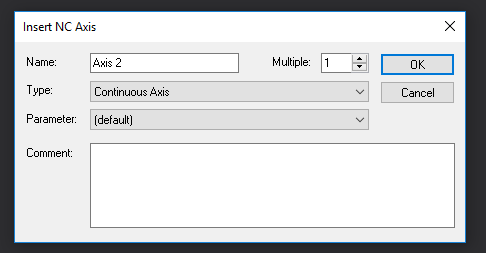
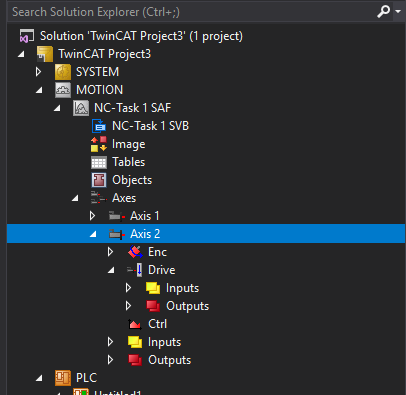
Axes>Add New Itemします。

Axis 2に名前つけ、OKします。
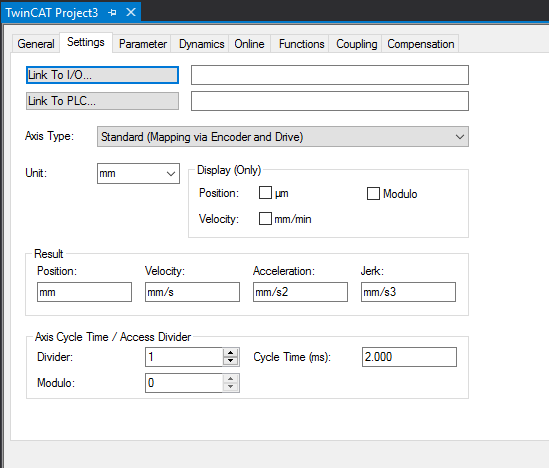
SettingsのTabみて、Link To I/OとLink To PLC2つの空であれば、自動で仮想軸になります。
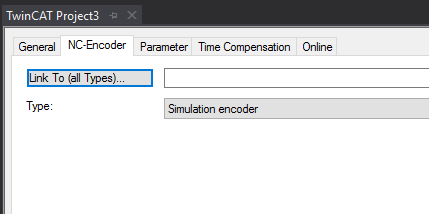
仮想軸のEncoderを見てます。

NC-EncoderでTypeがSimulation Encoderですね。それでOK。
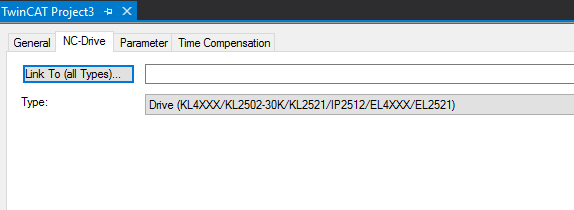
次はDriveで確認してみますね。

Link to …が空です。OK!
Download
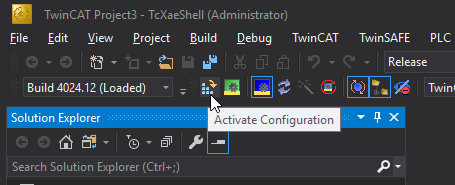
Activate Configurationします。
Loginします。

Control Panel動かす
先追加したAxis 2をクリックします。
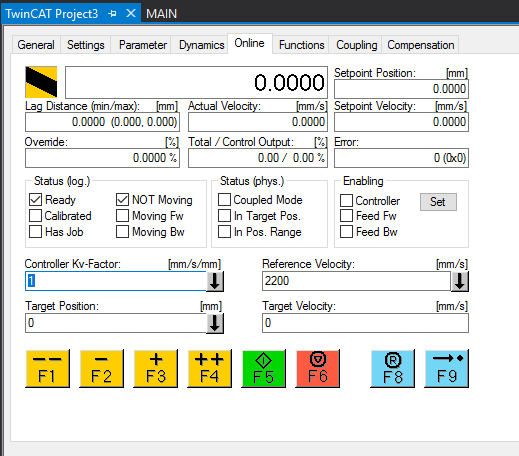
Online Tabにクリックすると、Control Panelが見えます。
こっちのパネルで軸を直接に制御することができます。
SiemensのControl Panelみたいの感じですね!
Servo ON
まずServo Onします。
Enablingのところに”Set”をクリックします。
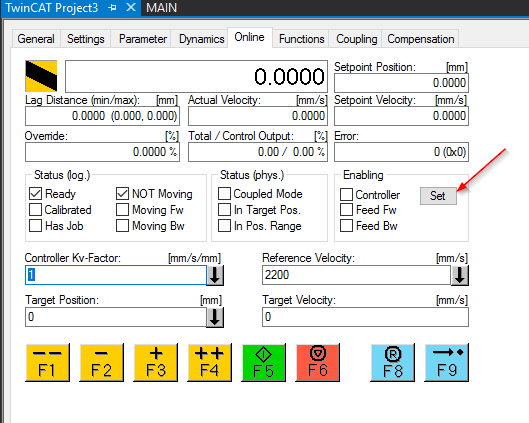
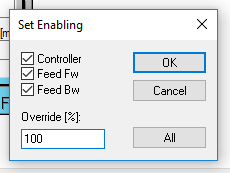
この小さいなPopup画面が出てきますね。
- Controller:Servo ONですね
- Feed Fw:正回転を有効するかどうか
- Feed Bw:逆回転を有効するかどうか
- Override;Robotの操作するときみたいに実際のSpeedかける?%のイメージです。
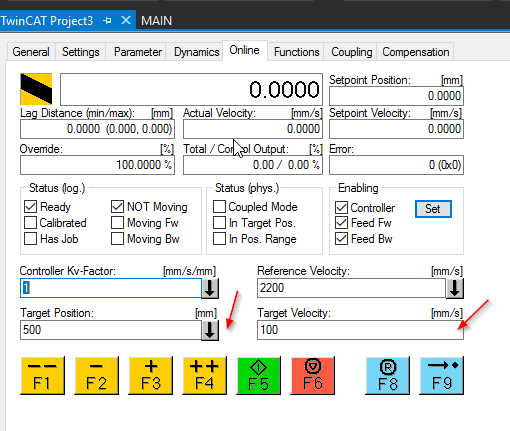
位置決め
Taget Positionで500mmを入れ、Target Velocityは100mm/sで設定します。
そうすると、軸は500mmまで100mm/sの速度で移動します。
Keyboardで”F5″を押すか、そのF5のボタンを押すと実行になります。
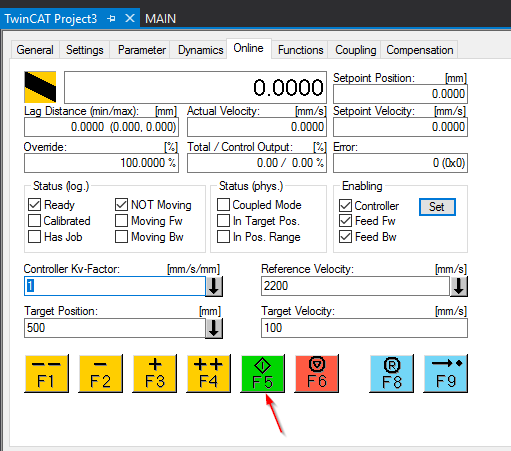
それで位置決めすることができます。

Home
隣のFunctions Tabをクリックし、Set Actual Position>0を入れて、”Set”ボタンを押すと現在Positionが0になります。
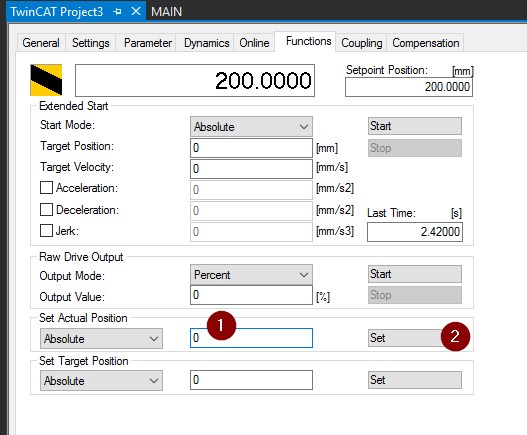
Jog
F1,F2はJog 反回転、F3,F4はJogの正回転です。
F1,F4は高速JogでF2,F4は低速Jogです。

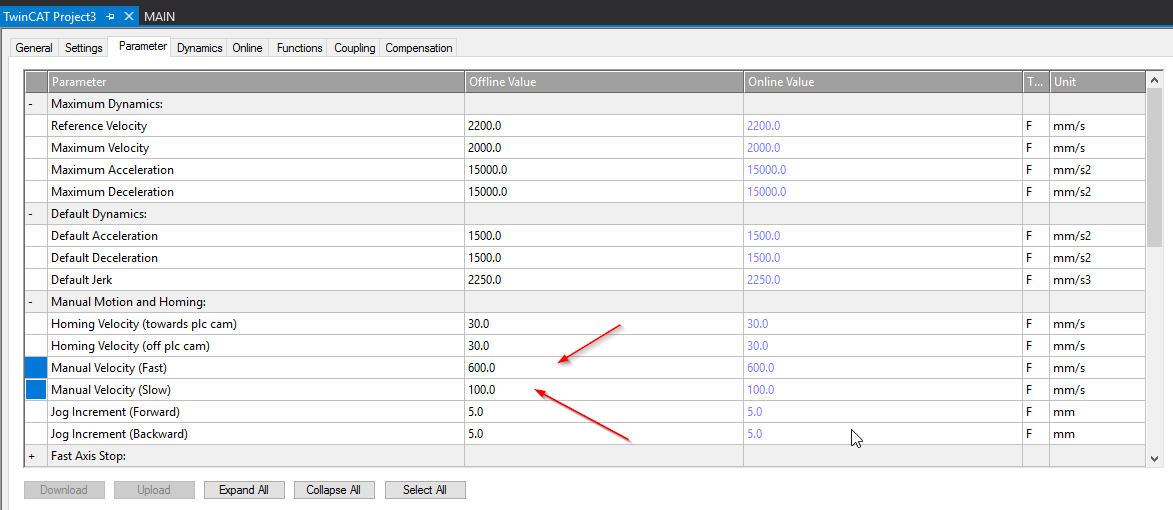
ParameterのTabでManual Velocity(Fast/Slow)でそのSpeed設定できます。
はーい、お疲れ様ですー