TF5430 TwinCAT3 Planar Motion パッケージはXPlanarを効率的に制御しあなたのXPlanarアプリケーションを実現できます。TF5430 はTF5890の一部です。
TwinCATではXPlanarをPlanar Mover Objectとして表現し、実機のMoverとリンクします。
Beckhoff TwinCAT3の便利なInterfaceのおかけでPLCから直接TwinCAT環境からXplanarを構築・プログラミング・設定・通信・制御を一貫管理できます。
この記事では全てあなたのPCだけでXplanarをSimulationすることでき、特別なハードウェアはいりません。どうぞよろしくお願いします。
Install packages
TF5430ではXPlanarを効率的に制御するには必要なライブラリが入っており、そのTF5430はTF5890 TwinCAT3 XPlanarに含まれています。すべてのFunction blockがライブラリ Tc3_Mc3PlanarMotion入っており、なおかつTc3_physicsと組み合わせて使用するイメージになります。
TF5400
TF5400のインストールfileをクリックします。

言語を選びます。ここで英語にします。
インストールが起動します。
Next>します。

ライセンス同意し、Nextします。

User Nameなど入れて、Next>します。
もしTwinCATバージョンが古い場合、Warningが出てきます。
そのときBeckhoffのHPから最新バージョンをDownloadしてください。
もしTwinCATのバージョンがOKであればWarningがでなくなります。

しばらく待ちます。
これでインストール完成です。

再起動してください。
TF5890
TF5890のインストールfileをクリックします。

言語を選びます。ここで英語にします。

Next>します。
ライセンスに同意し、Next>します。
User Nameなど入れて、Next>します。
Installで進みます。
しばらく待ちます…
これでインストール完成です。
再起動してください。

Basic Setup
Motion ProjectとPLC Project2つ大きな部分に分けています。
Add Motion Project
MOTION>右クリック>Add New Itemします。
MC Configurationを選び>OKします。

MC Projectが追加されました。

Add XPlanar
MC Project>右クリック>Add New Itemします。
Panar Mover を選び>Okします。

それでXPlanarが追加されました。
Simulation Setup
先程追加したMoverをクリックします。
そのようなセットアップ画面が出てきます。

Parameter(Init)Tabを開きます。下にあるShow Hidden ParametersのCheckboxを入れます。
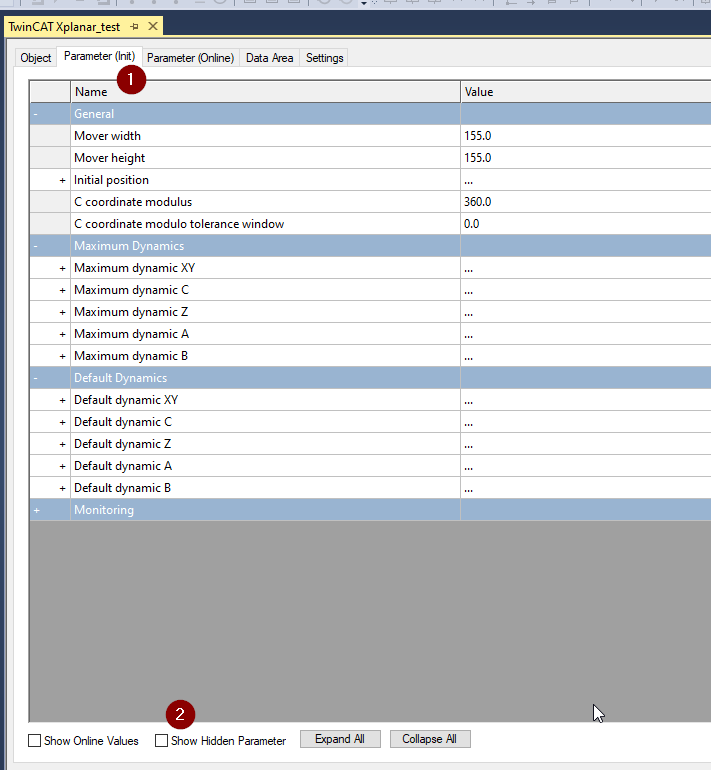
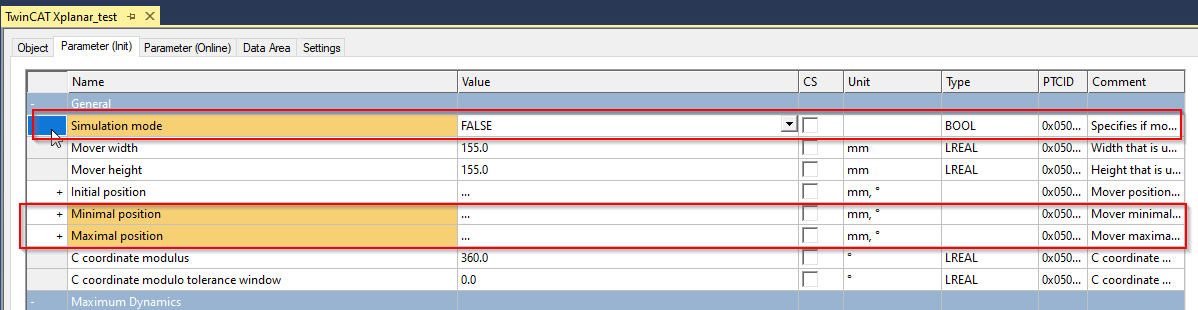
そうするとオレンジ色のパラメータが表示されます。
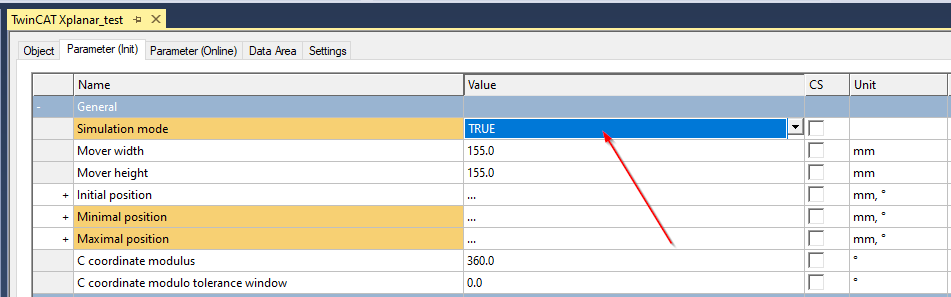
Simulation ModeのValueのTRUEに変更します。これで準備OKです。
ADD PLC
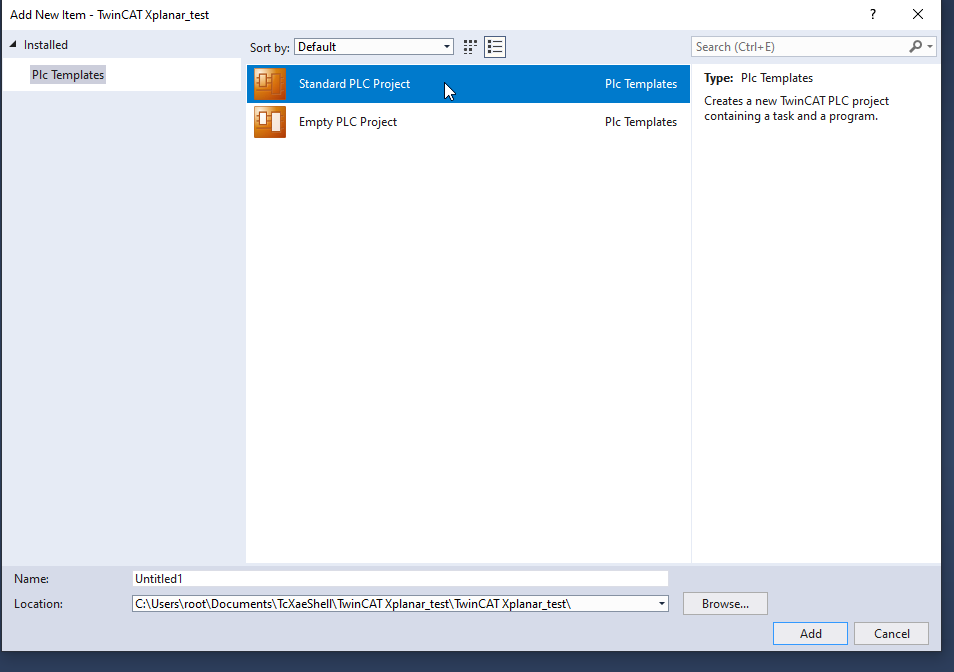
次はPLCを追加します。PLC>Add New Itemします。
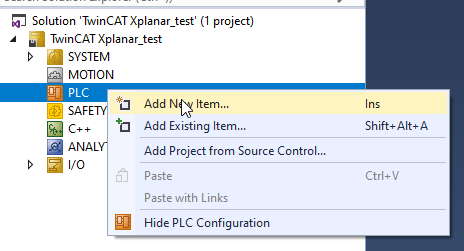
Standard PLC Projectを追加します。
Add Reference
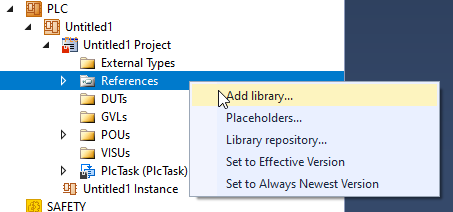
ライブラリを追加します。Reference>右クリック>Add libraryします。
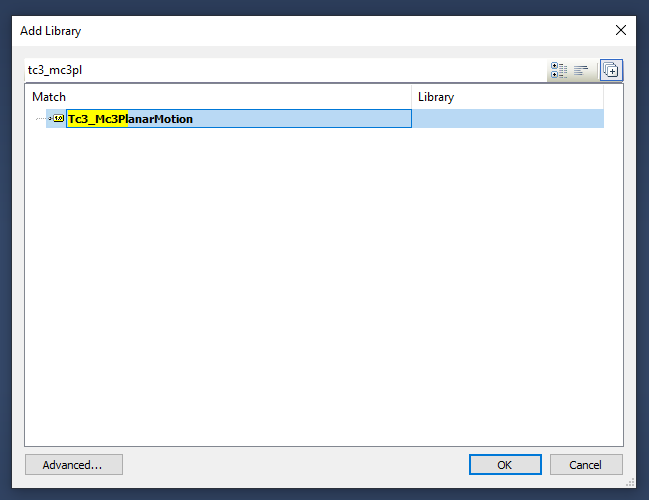
Tc3_physicsを追加します。

同じくTc3_Mc3PlanarMotionを追加します。
Add MC_PlanarMover
Planar Obejctを定義します。GVLs>Add>Global Variable Listを作成します。

MC_PlanarMover変数を定義します。

Build>Build Solutionでコンパイルをかけます。

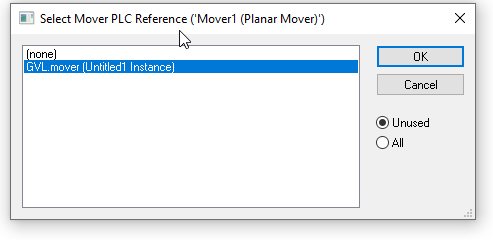
Link to Mover
Mover1をクリックします。

Link to PLCのボタンをクリックします。
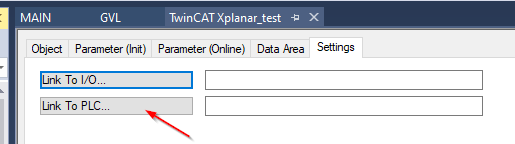
定義したMoverを選び>OKします。
API
XPlanarを制御するにはTc3_PhysicsとTc3_Mc3PlanarMotionライブラリを使用する必要があります。先程のStepもすでにReference を追加しましたので大丈夫です。ここからは今回の記事で使用するFunction block・DUTを紹介します。
DUT
EPlanarObjectType
PlanarのObject 種類を定義します。
| Name | Type | Value | Description |
| Invalid | UNIT | 0 | 部品がReadyしてないか、接続してないか |
| None | UNIT | 301 | Planarありません |
| Mover | UNIT | 302 | Planar Mover |
| Track | UNIT | 303 | Planar Track |
| Environment | UNIT | 304 | Planar Environment |
PlanarObjectInfo
Planarの独自のIDを定義するDUTです。
| Name | Type | Description |
| ObjectType | EPlanarObjectType | Objectの種類 |
| Id | UDINT | ObjectのID |
MC_PLANAR_STATE
部品の状態を表現するDUTです。
| Name | Type | Value | Description |
| Invalid | UNIT | 0 | 部品がReadyしてないか、接続してないか |
| Disabled | UNIT | 1 | 部品が無効されてた |
| Enabling | UNIT | 2 | 部品が有効されてる |
| Enabled | UNIT | 3 | 部品が有効されてた |
| Disabling | UNIT | 4 | 部品が無効されてる |
| Error | UNIT | 5 | 部品はエラー状態 |
| ErrorPending | UNIT | 6 | 部品が正常状態からエラー状態に移行してる |
| Resetting | UNIT | 7 | 部品はエラーからリセット中 |
MoverVector
6個の数値が格納されてるVectorで6 Coordinatesを表現するDUTです。
加速度や位置や速度などで使用されています。
| Name | Type | Description |
| x | LREAL | x座標 |
| y | LREAL | y座標 |
| z | LREAL | z座標 |
| a | LREAL | a座標 |
| b | LREAL | b座標 |
| c | LREAL | c座標 |
MoverBusy
PlanarMoverの座標Busy状態を表現するDUTです。
| Name | Type | Description |
| busyMover | BIT | True=PlanarMover がBusy中 |
| busyXYC | BIT | True=主座標がBusy中 |
| busyX | BIT | True=x座標がBusy中 |
| busyY | BIT | True=y座標がBusy中 |
| busyZ | BIT | True=z座標がBusy中 |
| busyA | BIT | True=a座標がBusy中 |
| busyB | BIT | True=b座標がBusy中 |
| busyC | BIT | True=c座標がBusy中 |
ST_MoveToPositionOptions
Planar MoverのMoveToPositionコマンドにあるOptionsです。
| Name | Type | Default | Description |
| useOrientation | BOOL | TRUE | TRUE=Orientationにも合わせて移動する |
ST_ExternalSetpointGenerationOptions
Planar moverのExternalSetpointGenerationコマンドにあるOptionsです。
| Name | Type | Default | Description |
| mode | MC_EXTERNAL_SET_POSITION_MODE | MC_EXTERNAL_SET_POSITION_MODE.Absolute | 相対移動や絶対移動を設定できます。 |
MC_EXTERNAL_SET_POSITION_MODE
External setpoint generation modeを表現するDUTです。
| Name | Type | Initial | Description |
| Invalid | UINT | 0 | 無効なデータ |
| Absolute | UINT | 1 | Planar moverはExternal setpointだけに従います(絶対位置決め) |
| Relative | UINT | 2 | Planar moveは相対位置決めになります |
| None | UINT | 3 | External setpoint生成なし |
PositionXYC
XYC位置のFunction blockです。注意するのは直接そのFBを呼び出さないことです。必ずそのObjectのMethodだけを使用してください。
SetValuesXY

VAR_INPUT
| Name | Type | Description |
| x | LREAL | x位置 |
| y | LREAL | y位置 |
Example
| VAR position : PositionXYC; x : LREAL := 20.0; y : LREAL := 5.3; VAR_END position.SetValuesXY(x, y); |
MC_PlanarMover
PlanarMover Objectは実際Planarを制御するObjectになります。注意するのは直接そのFBを呼び出さないことです。必ずそのObjectのMethodだけを使用してください。
MoveToPosition
直接PlanarMoverに目標値命令を発行します。
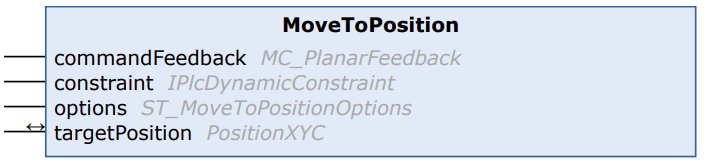
VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| constraint | IPlcDynamicConstraint | Planarの移動に対する制約 |
| options | ST_MoveToPositionOptions | Planarの移動オプション |
VAR_INOUT
| Name | Type | Description |
| targetPosition | PositionXYC | 目標値 |
Enable
XPlanarを有効にする。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
Update
Objectの内部状態を更新するためのMethodです。毎サイクルも呼ぶ必要があります。

Disable
XPlanarを無効にする。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
Reset

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
MoveZ
Z移動コマンドを発行します。
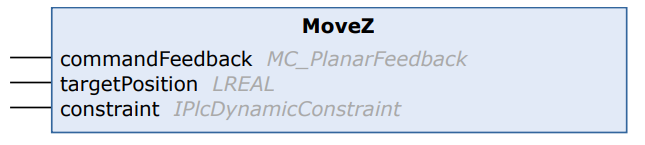
VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| targetPosition | LREAL | PlanarのTarget位置 |
| constraint | IPlcDynamicConstraint | Planarの移動に対する制約 |
MoveA
A移動コマンドを発行します。
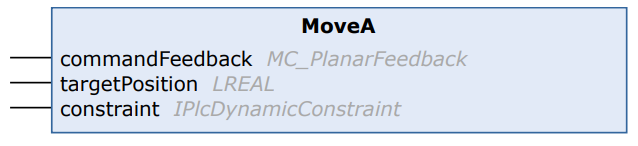
VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| targetPosition | LREAL | PlanarのTarget位置 |
| constraint | IPlcDynamicConstraint | Planarの移動に対する制約 |
MoveB
B移動コマンドを発行します。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| targetPosition | LREAL | PlanarのTarget位置 |
| constraint | IPlcDynamicConstraint | Planarの移動に対する制約 |
MoveC
Cの移動コマンドを発行します。
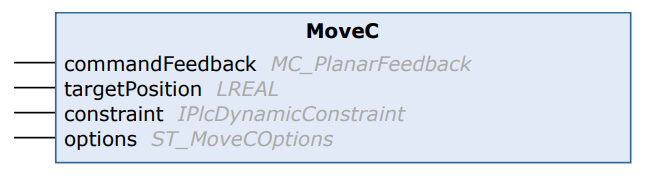
VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| targetPosition | LREAL | PlanarのTarget位置 |
| constraint | IPlcDynamicConstraint | Planarの移動に対する制約 |
StartExternalSetpointGeneration
External setpoint生成が始まります。プログラムでPLCサイクルごとにSetpointを更新する必要があります。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| options | ST_ExternalSetpointGenerationOptions | Xplanar移動のOptions |
StopExternalSetpointGeneration
External setpoint生成を停止します。SetExternalSetpoint MethodがCallされた同じPLCサイクルにCallする必要があります。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
SetExternalSetpoint
Planar Moverに external setpointを設定します。プログラムでSetpoin生成をするとき、PLCサイクルごとにそのMethodを呼び出してください。
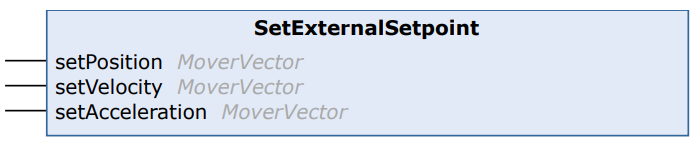
VAR_INPUT
| Name | Type | Description |
| setPosition | MoverVector | The position setpoint is sent to the Planar Mover. |
| setVelocity | MoverVector | The velocity setpoint is sent to the Planar Mover. |
| setAcceleration | MoverVector | The acceleration setpoint is sent to the Planar Mover. |
MC_PlanarFeedback
コマンドのFeedback情報を取得します。そのMC_PlanarFeedback Instanceはコマンド発行のFunction Blockのパラメータとして渡しておけばOKです。
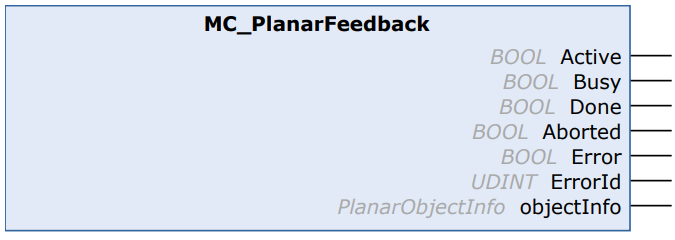
VAR_OUTPUT
| Name | Type | Description |
| Active | BOOL | コマンドはXplanarに受けられ、これから実行する |
| Busy | BOOL | コマンド実行中 |
| Done | BOOL | コマンドエラーなしで実行された |
| Aborted | BOOL | コマンド実行中に中断された |
| Error | BOOL | コマンド実行中にエラーあり |
| ErrorId | BOOL | エラー発生するときのID |
| ObjectInfo | PlannarObjectInfo | いまのFeedbackされてるObjectの情報 |
Update
Objectの内部状態を更新するためのMethodです。毎サイクルも呼ぶ必要があります。
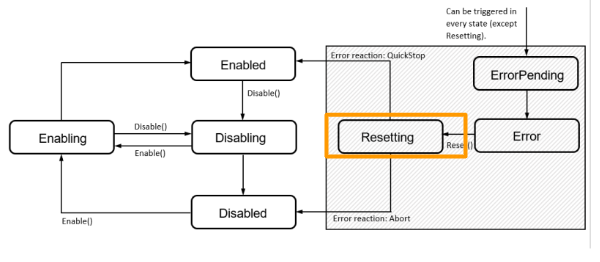
Flow
このFlow図はPlanar Mover・Plannar Track・Planar Groupの状態遷移図です。すべての美品では以下の7つの状態があります。それは:
- Enabling
- Enabled
- Disabling
- Disabled
- Resetting
- ErrorPending
- Error.
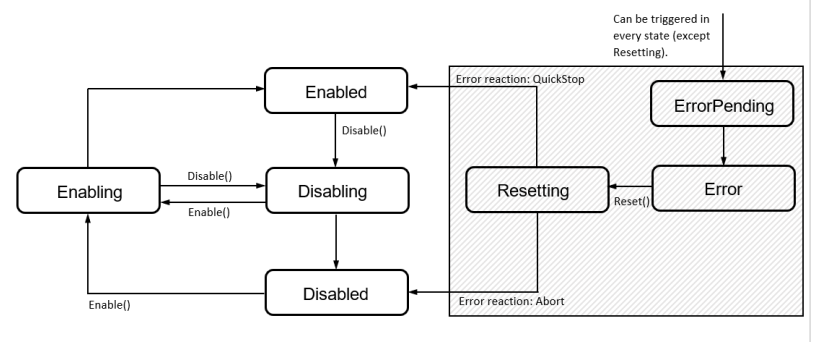
Enabling
Enableコマンドを実行したあとに部品がEnabing状態に移行します。この状態でDisableコマンドを発行すると部品の状態をDisabling状態に変更することできます。
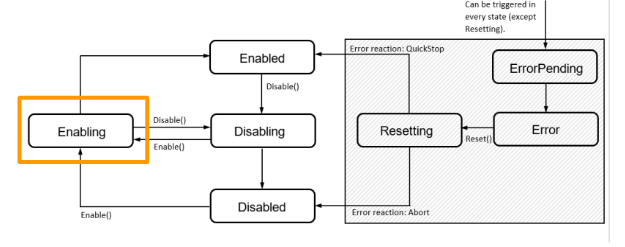
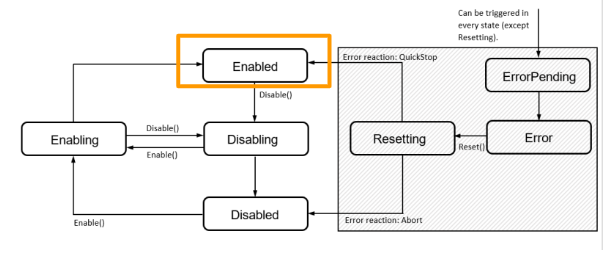
Enabled
部品がEnabled状態に移行したら、Userが該当する部品の機能をすべて使用できます。その状態ではDisableコマンドを発行し部品をDisabling状態に移行できます。
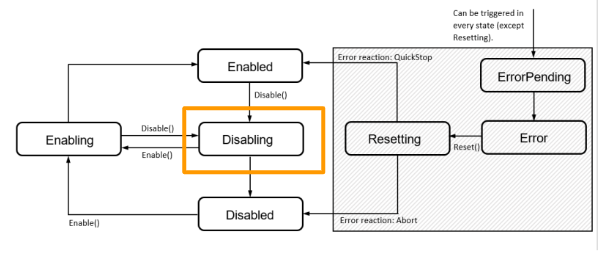
Disabling
Disbaleコマンドを実行したあとに部品がDisabling状態に移行します。この状態でEnableコマンドを発行すると部品の状態をEnabling状態に変更することできます。
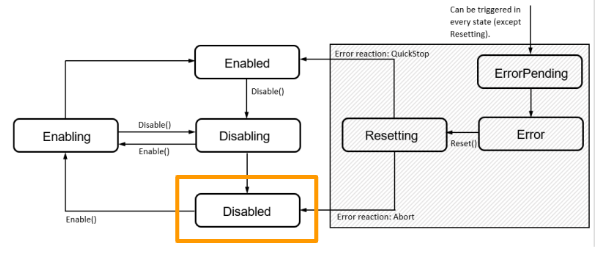
Disabled
システムが起動するたびに部品はそのDisbaled状態になります。そのときEnableコマンドを発行するとEnablingに移行し、最後にEnabled状態に変わります。
Disabled状態では部品の機能は使用できません。
Resetting
部品のエラーからリセットしている状態を示しています。もしエラーが解消されたら、Enabled状態に変わり、エラーがまだKeepしてるであればDisabled状態に変わります。
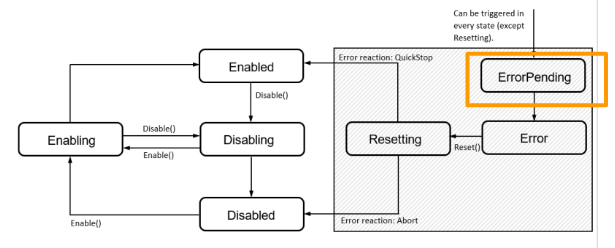
ErrorPending
部品がエラー発生するとその状態に移行し、最後にError状態に変わります。(Resetting以外)
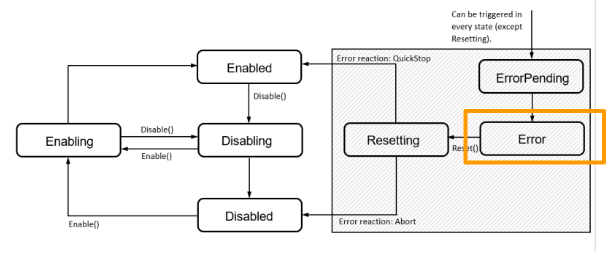
Error
エラー状態では該当する部品がエラー発生してます。Resetコマンドを発行するとResetting状態に変わります。
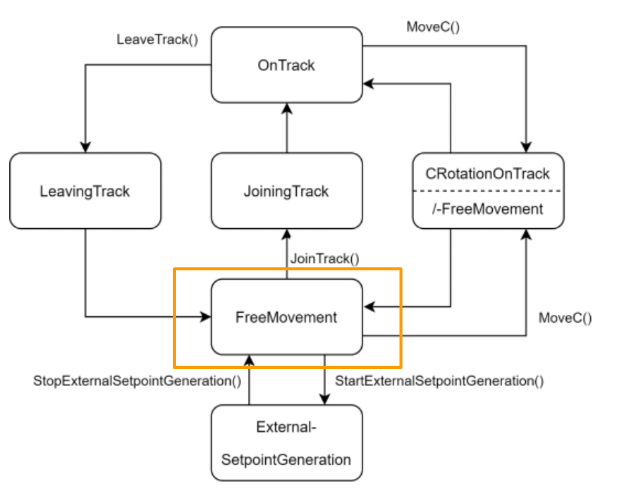
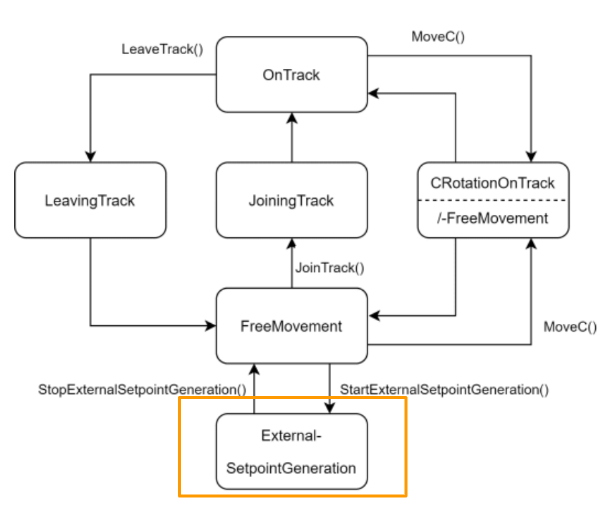
Planar mover command diagram
Planar moverは6種類のコマンドモードがあります。
- OnTrack
- LeavingTrack
- JoiningTrack
- ExternalSetpointGeneration
- CRotationFreeMovement/-
- FreeMovement

FreeMovement
今回は初めてのXPlanarシリーズで自分も勉強を始めたばかりなので、一番簡単な動作モードから始めます。それはFreemovementです。
Moverを有効化しEnabled状態に移行した後に自動的にこのコマンドModeに変わります。そのModeに入るとMoveToPositionを使用し自由にMoverを動かすことができます。、
もちろんこのModeからExternalSetpointGenerationやJoiningTrackに移行することも可能です。MoveC コマンドを使用するとCRotationFreeMovementモードに移行できるなど、自由度が高いです。
ExternalSetpointGeneration
次はExternalSetpointGeneration です。そのExternalSetpointGeneration modeを使用することにより現在のPositionを足すOffsetのような形で相対位置決めを実装できます。
Implementation-1 Move it!
では最初にまずFreeMovement モードからMoveToPositionを使用しPlanar moverを移動してみましょう。
GVL
Global Variable ListにMover ObjectとコマンドのFeedback用のObjectを定義します。
| VAR_GLOBAL mover:MC_PlanarMover; commandFeedback:MC_PlanarFeedback; END_VAR |
MAIN
流れとしてはXplanar初期化>Xplanar有効>MoveToPositionコマンド発行>戻すの無限Loopになります。MoveToPositionのTarget値はARRAY[0..5]OF PositionXYCで5まで行ったらまた0に戻る。
VAR
| PROGRAM MAIN VAR iStep :UDINT; moverStatus :MC_PLANAR_STATE; counter :INT; TargetPositions :ARRAY[0..5]OF PositionXYC; i :INT; bGo :BOOL; bReset :BOOL; bDisable :BOOL; END_VAR VAR CONSTANT cStepXplanarInit :UDINT :=0; cStepXplanarEnable :UDINT :=10; cStepMoveToPosition :UDINT :=20; cStepDisable :UDINT :=99; cStepReset :UDINT :=98; END_VAR |
Code
| //Sending Data to RoboDK by OPCUA GVL2RoboDK.xplanar1.pos.ActPos:=GVL.mover.MCTOPLC.ACT.ActPos; //Target Positions Init TargetPositions[0].SetValuesXY(0,200); TargetPositions[1].SetValuesXY(200,-200); TargetPositions[2].SetValuesXY(100,20); TargetPositions[3].SetValuesXY(40,0); TargetPositions[4].SetValuesXY(110,60); TargetPositions[5].SetValuesXY(50,200); //xPlanar Status moverStatus:=GVL.mover.MCTOPLC.STD.State; //Disable IF bDisable THEN GVL.mover.Disable(commandFeedback:=GVL.commandFeedback); iStep:=cStepDisable; END_IF //Reset IF bReset THEN GVL.mover.Reset(commandFeedback:=GVL.commandFeedback); iStep:=cStepReset; END_IF CASE iStep OF cStepXplanarInit: GVL. mover.Enable(commandFeedback:=GVL.commandFeedback); iStep := cStepXplanarEnable; cStepXplanarEnable: IF GVL.mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled THEN iStep := cStepMoveToPosition; END_IF counter:=0; bGo:=TRUE; cStepMoveToPosition: IF bGo THEN GVL.mover.MoveToPosition( commandFeedback:=GVL.commandFeedback ,targetPosition:=TargetPositions[counter] ,constraint:=0 ,options:=0 ); bGo:=FALSE; END_IF; IF GVL.commandFeedback.Done THEN counter:=counter+1; bGo:=TRUE; IF counter > 5 THEN iStep:=cStepXplanarEnable; END_IF END_IF cStepDisable: IF moverStatus= MC_PLANAR_STATE.Disabled THEN bDisable:=FALSE; iStep:=cStepXplanarInit; END_IF cStepReset: IF moverStatus= MC_PLANAR_STATE.Enabled THEN bReset:=FALSE; iStep:=cStepXplanarInit; END_IF END_CASE //Update GVL.mover.Update(); GVL.commandFeedback.Update(); |
Result
GVL.mover.MCTOPLC.ACT.ActPosにxyzabc座標が移動してるとわかります。ちなみにMCTOPLC.ACTは現在データになります。

Simulation With RoboDK
本来ならTF5890 Xplanar Configuratorを使用したいのですが、何回やってもTCCOM Not FoundとかNo Servicesとかのエラーが発生し解決できなく、代わりにRoboDKで可視化しました。でもRoboDKならあとのロボット追加も便利なので、こっちのほうがよいかもしれません。残りはMoverのCAD FileをDownloadできる場所を探すとか…
Reference Link
RoboDKとBeckhoff TwinCAT3の連携した記事↓
Add a “Plate” Object
まずはPlateを追加します。このPlateは実際Xplanarとサイズが違いますが、Simulationで練習と勉強するのにあまり細かいこときにしないでください。
RoboDKを起動し、地球マークをクリックします。

RoboDKの公式ライブラリHPに飛んできます。TypeをObject選び>RoboDK RDK Plateを選びます。
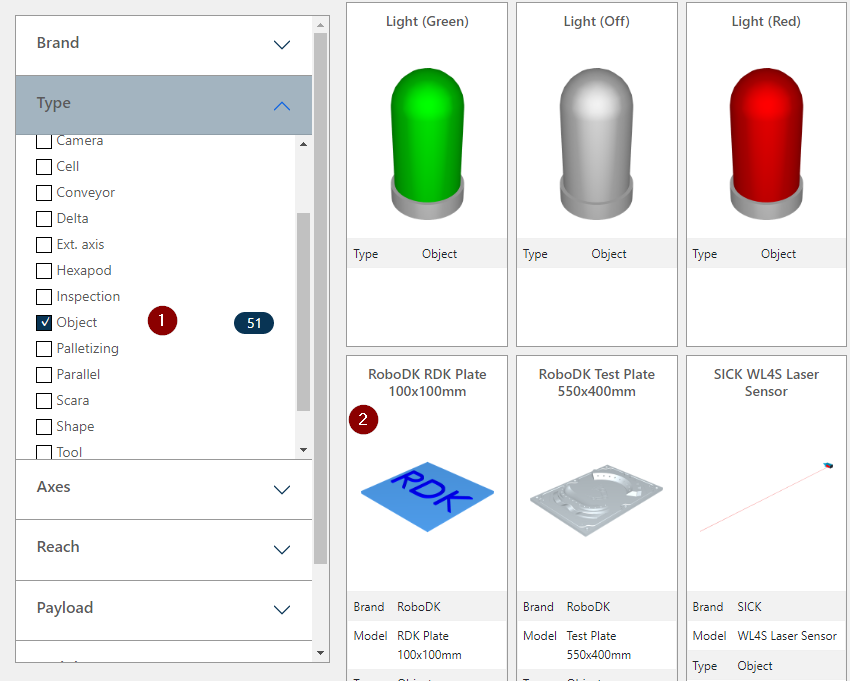
Downloadします。
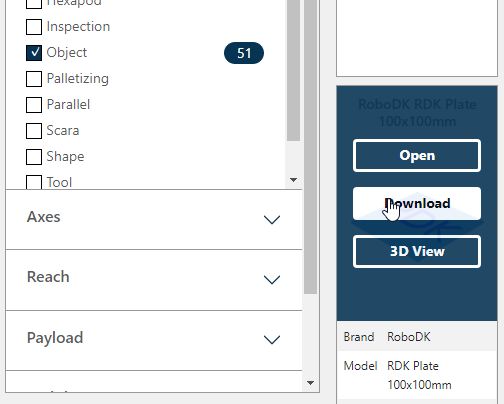
次はFile ボタンをクリックします。
先Downloadした.sldを開けばOKです。
Rename the plate
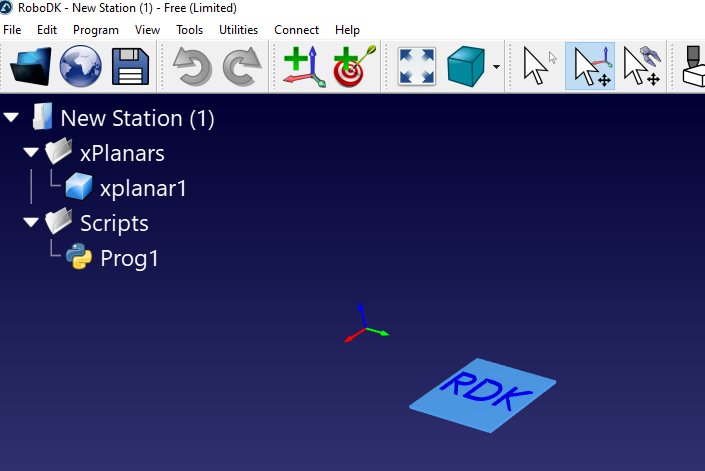
先ほど追加したPlateの名前を変更します。

右クリック>Renameでxplanar1と名前をつけてください。そのxplanar1という名前はPython Scriptで使用しますので。

Add Python Script
ToolbarsにあるAdd Python ProgramをクリックしPython Scriptを追加します。
画面ではこのようにProg1のScriptが追加されました。

Program
そのScriptをクリックし>Edit Python scriptします。
こちらは今回のScriptになります。
RoboDKからOPCUA Clientを立ち上げ、Beckhoff TwinCATからXplanarの6軸座標XYZABCを取得しPlateの現在座標を更新し続けます。難しいことはやっていません。
| from robodk import robolink # RoboDK API from robodk import robomath # Robot toolbox from opcua import Client,ua RDK = robolink.Robolink() from robodk import * # RoboDK API from robolink import * # Robot toolbox XPLANAR=’xplanar1′ ENDPOINT=”opc.tcp://DESKTOP-7FE1JP2:4840″ client=Client(ENDPOINT) NODES=’ns=4;s=GVL2RoboDK.xplanar1.pos.ActPos’ s # Program example: xplanar = RDK.Item(XPLANAR) if xplanar.Valid(): print(‘Item selected: ‘ + xplanar.Name()) print(‘Item posistion: ‘ + repr(xplanar.Pose())) client.connect() print(‘Connected to OPCUA server..’) NodeFromServer=client.get_node(NODES) client.load_type_definitions() # while True: Actpos=NodeFromServer.get_value() # CurrentPos=xyzrpw_2_pose([Actpos.x,Actpos.y,Actpos.z,Actpos.a,Actpos.b,Actpos.c]) xplanar.setPoseAbs(CurrentPos) client.disconnect() |
TwinCAT Side
RoboDK側は準備OKなのでまたTwinCAT側に戻ります。RoboDKとやり取り用のDUT・変数・データ転送プログラムを作成します。
Reference Link
こちらはBeckhoff TwinCAT3 TF6100 OPCUA Serverの立ち上げ手順です↓
DUT_Pos
MoverVectorの変数を定義し、OPCUA ServerにStruct Typeプロパティをつけて、Clientからアクセスできるようにします。
| TYPE DUT_Pos : STRUCT {attribute ‘OPC.UA.DA’ := ‘1’} {attribute ‘OPC.UA.DA.StructuredType’ := ‘1’} ActPos :MoverVector; END_STRUCT END_TYPE |
DUT_xPlanar
DUT_PosをDUT_xPlanarのグループ内に定義します。
| TYPE DUT_xPlanar : STRUCT pos :DUT_Pos; END_STRUCT END_TYPE |
GVL2RoboDK
Global Variable List GVL2RoboDKを追加し、実際のxplanar Moverの座標値を格納する変数を定義します。
| {attribute ‘qualified_only’} VAR_GLOBAL {attribute ‘OPC.UA.DA’ := ‘1’} {attribute ‘OPC.UA.DA.StructuredType’ := ‘1’} xplanar1 :DUT_xPlanar; END_VAR |
MAIN
MAINプログラムは先程とおなじく、転送プログラム 1 Lineを追加するだけです。
| //Sending Data to RoboDK by OPCUA GVL2RoboDK.xplanar1.pos.ActPos:=GVL.mover.MCTOPLC.ACT.ActPos; |
Result
RoboDKと連携すると実際Plateどう動いてるかわかりますね!
Implementation-2 Move axis by axis!
次は各軸ごとに移動してみますね!まずは軸AB、次は軸CZです。
GVL
Example1のGVLとわかりませんが、MC_PlanarFeedbackの配列、commandFeedbacksを追加しただけです。MoveA、MoveB、MoveZ、MoveCコマンドを発行するとき別々のコマンドがDoneしてるかをCheckするためです。
| {attribute ‘qualified_only’} VAR_GLOBAL mover:MC_PlanarMover; commandFeedback:MC_PlanarFeedback; commandFeedbacks:ARRAY[0..4]OF MC_PlanarFeedback; END_VAR |
MAIN
流れとしてはXplanar初期化>Xplanar有効>MoveA MoveBコマンド発行>次はMoveC MoveZコマンド発行>ENDになります。
VAR
| PROGRAM MAIN_Example2 VAR iStep :UDINT; moverStatus :MC_PLANAR_STATE; counter :INT; i :INT; bGo :BOOL; bReset :BOOL; bDisable :BOOL; TargetA :LREAL:=1.0; TargetB :LREAL:=-1.0; TargetC :LREAL:=10.0; TargetZ :LREAL:=5.0; ZeroPosition :PositionXYC; binit :BOOL; END_VAR VAR CONSTANT cStepXplanarInit :UDINT :=0; cStepResetPosition :UDINT :=5; cStepXplanarEnable :UDINT :=10; cStepMoveAB :UDINT :=20; cStepDelay :UDINT :=30; cStepMoveCZ :UDINT :=40; cStepDisable :UDINT :=99; cStepReset :UDINT :=98; END_VAR |
Code
| //Sending Data to RoboDK by OPCUA GVL2RoboDK.xplanar1.pos.ActPos:=GVL.mover.MCTOPLC.ACT.ActPos; //Target Positions Init ZeroPosition.SetValuesXYC(x:=0,y:=0,c:=0); //xPlanar Status moverStatus:=GVL.mover.MCTOPLC.STD.State; //Disable IF bDisable THEN GVL.mover.Disable(commandFeedback:=GVL.commandFeedback); iStep:=cStepDisable; END_IF //Reset IF bReset THEN GVL.mover.Reset(commandFeedback:=GVL.commandFeedback); iStep:=cStepReset; END_IF CASE iStep OF cStepXplanarInit: binit:=FALSE; iStep:=cStepResetPosition; cStepResetPosition: IF GVL.mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Disabled AND NOT binit THEN GVL.mover.SetPosition(commandFeedback:=GVL.commandFeedback,position:=ZeroPosition); binit:=TRUE; END_IF; IF GVL.commandFeedback.Done THEN iStep := cStepXplanarEnable; END_IF; cStepXplanarEnable: GVL. mover.Enable(commandFeedback:=GVL.commandFeedback); IF GVL.mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled THEN iStep := cStepMoveAB; END_IF counter:=0; bGo:=TRUE; cStepMoveAB: IF bGo THEN GVL.mover.MoveA( commandFeedback:=GVL.commandFeedbacks[0] ,targetPosition:=TargetA ,constraint:=0 ); GVL.mover.MoveB( commandFeedback:=GVL.commandFeedbacks[1] ,targetPosition:=TargetB ,constraint:=0 ); bGo:=FALSE; END_IF; IF GVL.commandFeedbacks[0].Done AND GVL.commandFeedbacks[1].Done THEN iStep:=cStepMoveCZ; bGo:=TRUE; END_IF cStepMoveCZ: IF bGo THEN GVL.mover.MoveZ( commandFeedback:=GVL.commandFeedbacks[0] ,targetPosition:=TargetZ ,constraint:=0 ); GVL.mover.MoveC( commandFeedback:=GVL.commandFeedback ,targetPosition:=TargetC ,constraint:=0 ,options:=0 ); bGo:=FALSE; END_IF IF GVL.commandFeedbacks[0].Done AND GVL.commandFeedbacks[1].Done THEN iStep:=cStepDelay; END_IF cStepDisable: IF moverStatus= MC_PLANAR_STATE.Disabled THEN bDisable:=FALSE; iStep:=cStepXplanarInit; END_IF cStepReset: IF moverStatus= MC_PLANAR_STATE.Enabled THEN bReset:=FALSE; iStep:=cStepXplanarInit; END_IF END_CASE //Update GVL.mover.Update(); GVL.commandFeedback.Update(); GVL.commandFeedbacks[0].Update(); GVL.commandFeedbacks[1].Update(); GVL.commandFeedbacks[2].Update(); GVL.commandFeedbacks[3].Update(); GVL.commandFeedbacks[4].Update(); |
Result
少しわかりにくいかもしれませんが、PlateのABCZ軸は移動したとわかります!
Implementation-3 ExternalSetpointGeneration!
このExampleではMoverを有効しexternal setpoint generationをスタートします。cStepSetExternalSetpointのStepでずっとSetpointを更新し、Xplanarが相対移動量を変化させています。cStepStopExternalSetpointGenerationのStepでSetpointを更新停止します。
MAIN
VAR
| PROGRAM MAIN_Example3 VAR iStep :UDINT; moverStatus :MC_PLANAR_STATE; counter :INT; i :INT; bGo :BOOL; bReset :BOOL; bDisable :BOOL; TargetA :LREAL:=1.0; TargetB :LREAL:=-1.0; TargetC :LREAL:=10.0; TargetZ :LREAL:=5.0; ZeroPosition :PositionXYC; binit :BOOL; setPosition ,setVelocity ,setAcceleration :MoverVector; dxPosition ,dxVelocity ,dxAcceleration :LREAL:=0.001; END_VAR VAR CONSTANT cStepXplanarInit :UDINT :=0; cStepResetPosition :UDINT :=5; cStepXplanarEnable :UDINT :=10; cStepStartExternalSetpointGeneration :UDINT :=20; cStepSetExternalSetpoint :UDINT :=30; cStepStopExternalSetpointGeneration :UDINT :=50; cStepStopExternalSetpointGenerationWait :UDINT :=55; cStepDisable :UDINT :=99; cStepReset :UDINT :=98; END_VAR |
Code
| //Sending Data to RoboDK by OPCUA GVL2RoboDK.xplanar1.pos.ActPos:=GVL.mover.MCTOPLC.ACT.ActPos; //Target Positions Init ZeroPosition.SetValuesXYC(x:=0,y:=0,c:=0); //xPlanar Status moverStatus:=GVL.mover.MCTOPLC.STD.State; //Disable IF bDisable THEN GVL.mover.Disable(commandFeedback:=GVL.commandFeedback); iStep:=cStepDisable; END_IF //Reset IF bReset THEN GVL.mover.Reset(commandFeedback:=GVL.commandFeedback); iStep:=cStepReset; END_IF CASE iStep OF cStepXplanarInit: binit:=FALSE; iStep:=cStepResetPosition; cStepResetPosition: IF GVL.mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Disabled AND NOT binit THEN GVL.mover.SetPosition(commandFeedback:=GVL.commandFeedback,position:=ZeroPosition); binit:=TRUE; END_IF; IF GVL.commandFeedback.Done THEN iStep := cStepXplanarEnable; END_IF; cStepXplanarEnable: GVL. mover.Enable(commandFeedback:=GVL.commandFeedback); IF GVL.mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled THEN iStep := cStepStartExternalSetpointGeneration; END_IF bGo:=TRUE; cStepStartExternalSetpointGeneration: setPosition.x:=0.0; setVelocity.x:=0.0; setAcceleration.x:=0.0; GVL.mover.StartExternalSetpointGeneration(commandFeedback:=GVL.commandFeedback,options:=0); GVL.mover.SetExternalSetpoint(setPosition:=setPosition,setVelocity:=setVelocity,setAcceleration:=setAcceleration); IF GVL.commandFeedback.Busy THEN iStep:=cStepSetExternalSetpoint; END_IF cStepSetExternalSetpoint: setPosition.x:=setPosition.x+dxPosition*setVelocity.x; setVelocity.x:=setVelocity.x+dxVelocity*setAcceleration.x; setAcceleration.x:=setAcceleration.x+dxAcceleration*1.0; GVL.mover.SetExternalSetpoint(setPosition:=setPosition,setVelocity:=setVelocity,setAcceleration:=setAcceleration); IF setAcceleration.x >=1.0 THEN iStep:=cStepStopExternalSetpointGeneration; END_IF cStepStopExternalSetpointGeneration: GVL.mover.StopExternalSetpointGeneration(commandFeedback:=GVL.commandFeedback); iStep:=cStepStopExternalSetpointGenerationWait; cStepStopExternalSetpointGenerationWait: IF GVL.commandFeedback.Done THEN iStep:=999; END_IF cStepDisable: IF moverStatus= MC_PLANAR_STATE.Disabled THEN bDisable:=FALSE; iStep:=cStepXplanarInit; END_IF cStepReset: IF moverStatus= MC_PLANAR_STATE.Enabled THEN bReset:=FALSE; iStep:=cStepXplanarInit; END_IF END_CASE //Update GVL.mover.Update(); GVL.commandFeedback.Update(); GVL.commandFeedbacks[0].Update(); GVL.commandFeedbacks[1].Update(); GVL.commandFeedbacks[2].Update(); GVL.commandFeedbacks[3].Update(); GVL.commandFeedbacks[4].Update(); |
Result
Plateがずっと以下の式でPositionを更新しています!
setPosition.x:=setPosition.x+dxPosition*setVelocity.x;
Points!
- 実機がない場合は必ずSimulation ModeをTureにしてください。
- MC_PlanarMoverやMC_PlanarFeedback Function Blockは直接Callせず、MethodでXplanarを制御してください。
- MC_PlanarMoverやMC_PlanarFeedback Function Block使用するとき必ずUpdare() Methodで内部Statusを更新すること
- MC_PlanarFeedbackは各コマンド(例えばMoveZ)のInput Parameter commandFeedbackそのまま渡せばOKです
- SetExternalSetpointをCallするときSetpointをCycleごとにUpdateしてください。
Source Code
以下のLinkからSource CodeをDownloadしてください。
https://github.com/soup01Threes/TwinCAT3/blob/main/TwinCAT%20Project%20xplanar1%20.zip
TwinCAT Project xplanar1.tnzipはTwinCAT Projectです。
xplanar simulation.rdkはROBODKのプロジェクトです。
