前回はTF5430を使用しRoboDKと連携でXplanarの簡単移動を説明しました。今回はTrack機能を使用し複数の仮想Trackを作成、MoverがそのTrack沿って移動するプログラムを紹介します。よろしくお願いします。
Reference Link
Track?
TrackはUser定義できる経路で、Moverはその経路に沿って移動し、なおかつ複数のTrackを同時に接続することができます。MoverはTrack間を自由に切り替えられます。(切り替えるのタイミングはMoverは移動してるTrackのEnd Pointに到達したとき)
衝突の話は今回触れませんが、複数のMoversを衝突防止するために様々な設定があり、Mover間の興味を近すぎないように制限します。
API
今回も同じくTutorial内で使用するDUTやFunction Blockのみ説明します。
DUT
ST_JoinTrackOptions
JoinTrackコマンドオプションです。
| Name | Type | Default | Description |
| useOrientation | BOOL | True | the target orientation is also reachedat the end of themovement |
ST_LeaveTrackOptions
LeaveTrackコマンドオプションです。
| Name | Type | Default | Description |
| useOrientation | BOOL | True | the target orientation is also reachedat the end of themovement |
ST_MoveOnTrackOptions
MoveOnTrackコマンドのオプションです。
| Name | Type | Default | Description |
| gap | LREAL | 200.0 | Track上のMover間の最小距離 |
| direction | MC_DIRECTION | MC_DIRECTION.mcDirectionNonModulo | Mover移動するの方向 |
| additionalTurns | UDINT | 0 | |
| moduloTolerance | LREAL | 0.0 |
MC_PlanarMover
前回にもPlanarMoverの一部の機能を説明しました。今回はTutorialに合わせて使用してるMethodを説明します。注意するのは直接そのFBを呼び出さないことです。必ずそのObjectのMethodだけを使用してください。
JoinTrack
Mover にtrack を参加し、そのmover がtrack に沿って移動するようになります。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| constraint | IPlcDynamicConstraint | Planarの移動に対する制約 |
| options | ST_JoinTrackOptions | Planarの移動オプション |
VAR_INOUT
| Name | Type | Description |
| targetTrack | MC_PlanarTrack | Planarが沿ってるTrack |
LeaveTrack
Mover がtrack から脱離します。離脱するときもmover の移動先を決めることできます。
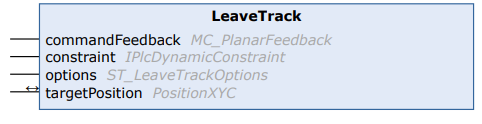
VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| constraint | IPlcDynamicConstraint | Planarの移動に対する制約 |
| options | ST_LeaveTrackOptions | Planarの移動オプション |
VAR_INOUT
| Name | Type | Description |
| targetPosition | PositionXYC | 移動先のTarget位置 |
MoveOnTrack
Mover にtrack を沿って指定の場所に移動します。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
| targetTrack | MC_PlanarTrack | Target track for the movement. If none is specified, this defaultsto the current track. |
| targetPositionOnTrack | LREAL | Target position on the target track |
| constraint | IPlcDynamicConstraint | Planarの移動に対する制約 |
| options | ST_MoveOnTrackOptions | Planarの移動オプション |
Enable
XPlanarを有効にする。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
Update
Objectの内部状態を更新するためのMethodです。毎サイクルも呼ぶ必要があります。

MC_PlanarTrack
Planar MoversはそのTrack Objectにそって移動できます。
すべてのTrackに乗せてるPlanar Moverはお互いに干渉しないように制御します。
注意するのは直接そのFBを呼び出さないことです。必ずそのObjectのMethodだけを使用してください。
AppendLine
Planar TrackにLineを追加します。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
VAR_INOUT
| Name | Type | Description |
| start | PositionXYC | Lineの起動位置 |
| end | PositionXYC | Lineの終了位置 |
StartFromTrack
ほかのtrack のendpoint と自分のtrack と繋がります。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
VAR_INOUT
| Name | Type | Description |
| track | MC_PlanarTrack | 次のStart pointとして設定するTracker |
EndAtTrack
自分のtrackのendpoint と別のtrack のstart point と繋がります。

VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
VAR_INOUT
| Name | Type | Description |
| track | MC_PlanarTrack | Planar Track Object |
Enable
XPlanarを有効にする。
VAR_INPUT
| Name | Type | Description |
| commandFeedback | MC_PlanarFeedback | 発行したコマンドに対するFeedback |
Update
Objectの内部状態を更新するためのMethodです。毎サイクルも呼ぶ必要があります。
AddTrack
Track 列にTrack を追加します、その追加されたtrack はいまのtrack 列の一番最後になります。

| Name | Type | Description |
| track | MC_PlanarTrack | Track Trailの最後に追加するTrackです。 |
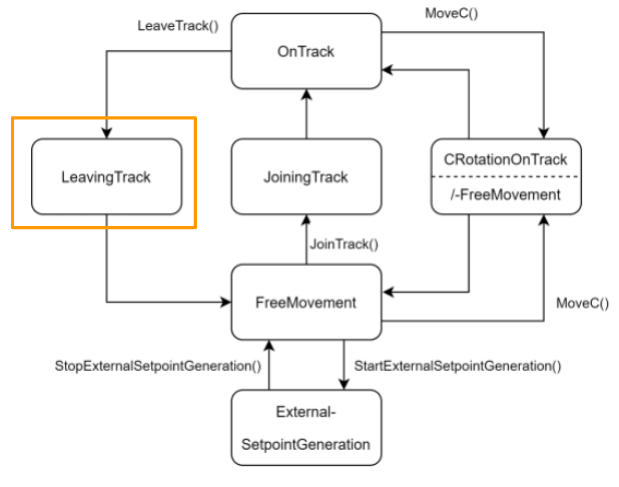
Planar mover command diagram
Planar moverは6種類のコマンドモードがあります。
- OnTrack
- LeavingTrack
- JoiningTrack
- ExternalSetpointGeneration
- CRotationFreeMovement/-
- FreeMovement

JoiningTrack
Joining track mode のmover はコマンド一切受け付けません。mover がJoinTrack コマンドで完了したら自動的にその状態からOnTrackに移行します。
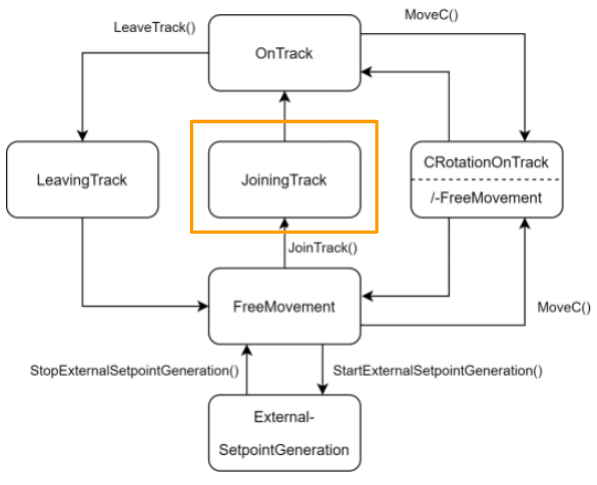
OnTrack
OnTrack mode ではmover 既にtrack に参加済みでMoveOnTrackコマンドで移動やLeaveTrackコマンドでtrackから脱離し、mover をleaving track モードに変更できます。MoveCコマンドを発行すると、mover がCRotationOnTrack mode に変わります。
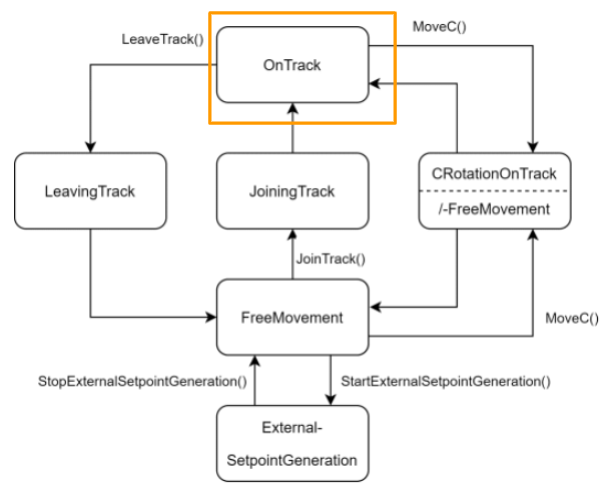
LeavingTrack
LeavingTrack mode のmover はコマンド一切受け付けません。mover がLeaveTrack コマンド完了したら自動的にその状態からFreemovementに移行します。
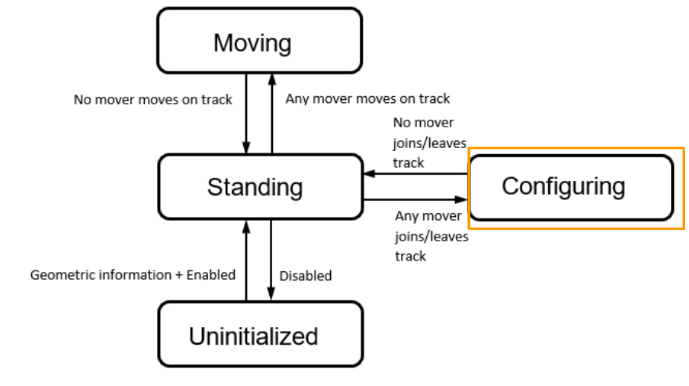
Planar track operation modes
Planar track は4つのモードがあり、いまのtrack 状態を示します。それは、
- Moving
- Standing
- Configuring
- Uninitialized.

Moving
Moving mode では、一つや複数のmover がtrack の上に移動してます。最初のmover はtrack の上に移動し始めると自動的standing mode からmoving mode に変更します。そしてtrack 上に最後のmover が移動完了したらまた自動的にstanding mode に戻ります。Mover はmoving modeのときはJoinTrack やLeaveTrack コマンドを実行できません。
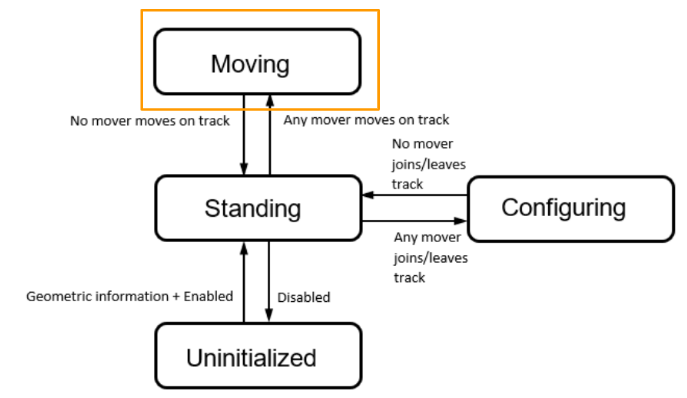
Standing
Standing mode ではmoversたちがこのtrackを使用でき、すべてのmovers がtravel コマンドを待ってる状態です。そのmode ではmoverたちがJoinTrack、 LeaveTrack 、MoveOnTrackコマンドを受け付けます。
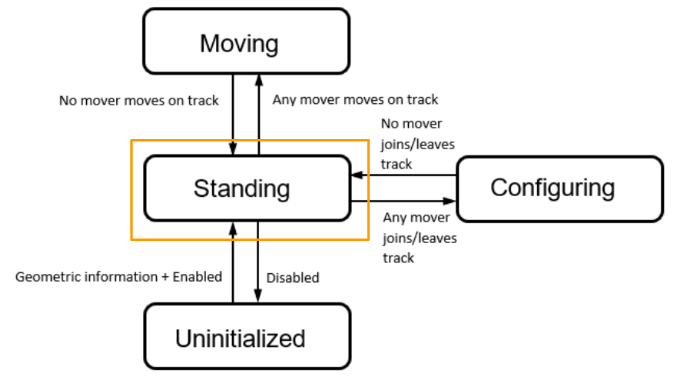
Configuring
Configuration mode は一つや複数の上にmovers がtrack に離脱してる(LeaveTrack)か参加してる(JoinTrack)かどっちかになってます。最初のmover がtrack の脱離や参加がはじめたら自動的にconfiguration mode に変わり、すべてのmoversが完了したらまた自動的にstanding mode に戻ります。
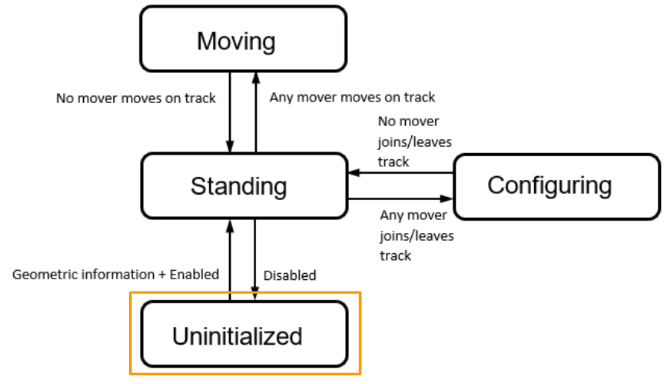
Uninitialized
Track がuninitiated の状態でmovers が使用できません。理由としてはgeomoetric の設定は完了してなく、user がtrack を使う前に必ずgeometric 情報設定し、そしてtrack 有効すれば自動的にstanding mode に変わります。
Basic Setup
ではhardware configuration から始めましょう。
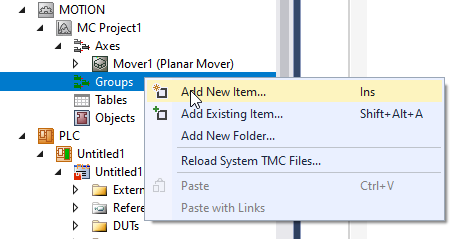
Add Planar Object
Motion>your mc project >Axes>Groups で右クリックし、Add New Item します。
Planar Track を選び、okします。
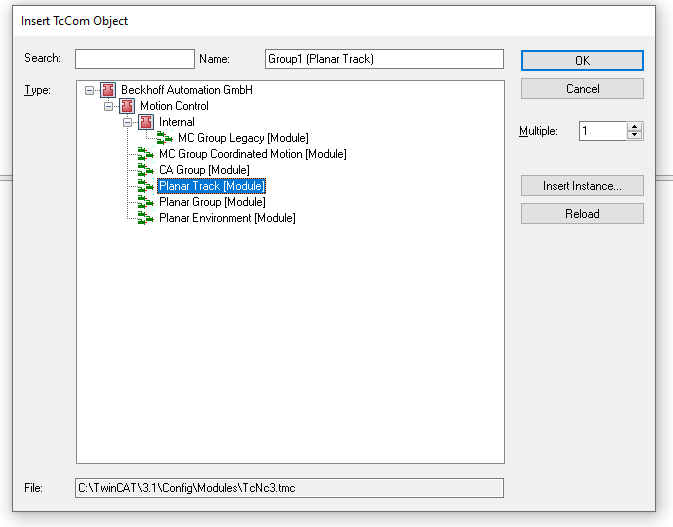
いまPlanar Track group が追加された。

中をクリックしますとTrack のパラメータ設定ができます。

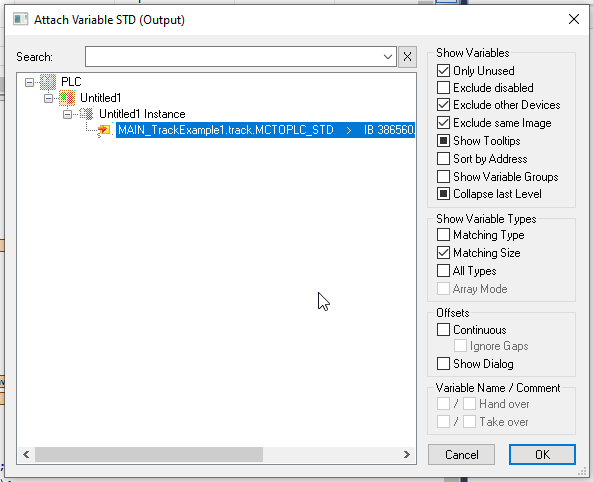
Group1>McTOPlc>STD を選び、右クリックしCahnge Link します。

TRACK と繋がってください。
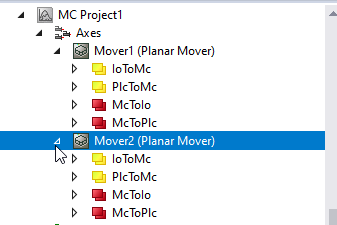
Add One More Mover
MC Projectでもう一つのMoverを追加してください。
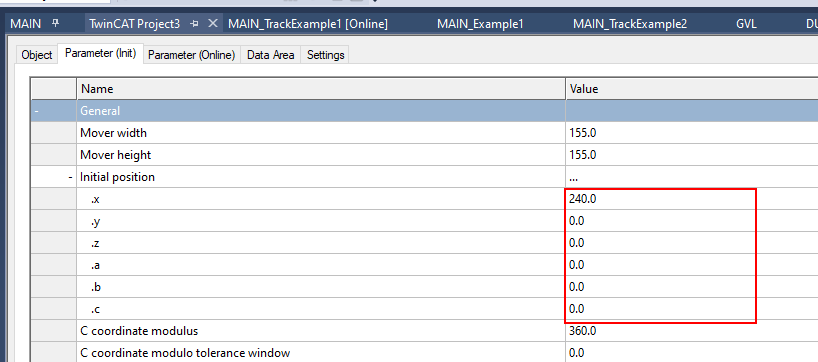
Set Mover Init Position
次はMover1,2の初期位置を設定します。
Mover1をクリックします。


次はMover2です。
Mover2は少し離れてるところにあります。
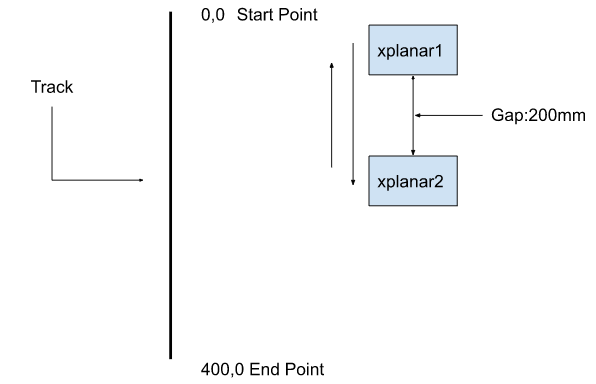
Implementation-1
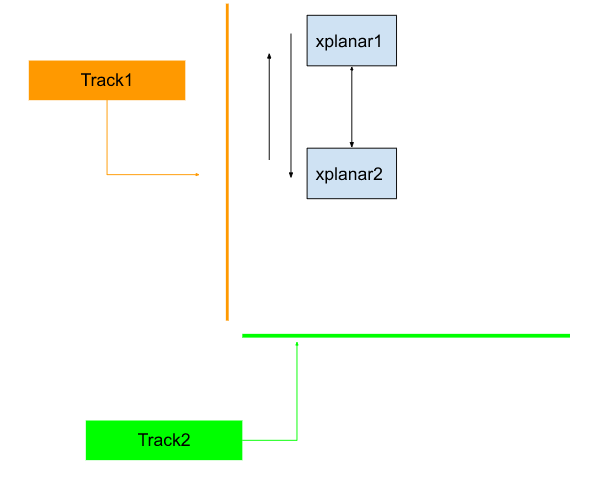
Implementation-1ではTrackが1つのみで、Start Pontが0,0、End Pointは400,0になります。Xplanar1とXplanar2はそのTrack1にそって移動します。
GVL
| {attribute ‘qualified_only’} VAR_GLOBAL mover:MC_PlanarMover; mover2:MC_PlanarMover; tracks : ARRAY[1..5]OF MC_PlanarTrack; commandFeedback:MC_PlanarFeedback; commandFeedbacks:ARRAY[0..4]OF MC_PlanarFeedback; END_VAR |
Code
VAR
| PROGRAM MAIN_TrackExample1 VAR //Track Options MoveOnTrackOption:ST_MoveOnTrackOptions; //Control Variables iStep : UDINT; //Position Setpoint pos1, pos2 : PositionXYC; MoveOnTrackPosition1:REAL:=150; MoveOnTrackPosition2:REAL:=350; END_VAR VAR CONSTANT cStepInit :UDINT := 0; cStepCheckTrackerEnabled :UDINT := 10; cStepEnableMovers :UDINT := 20; cStepCheckMoversEnabled :UDINT := 30; cStepJoinTrack :UDINT := 40; cStepCheckOnTrack :UDINT := 50; cStepMoveOnTrack :UDINT := 60; cStepCheckPosition :UDINT := 70; cStepEnd :UDINT := 80; END_VAR |
PROGRAM
いまプログラムやってるのはTrackを初期化>Start PointとEnd Point設定>Track有効>Movers有効>移動するの流れです。
| //Sending Data to RoboDK by OPCUA GVL2RoboDK.xplanar1.pos.ActPos:=GVL.mover.MCTOPLC.ACT.ActPos; GVL2RoboDK.xplanar2.pos.ActPos:=GVL.mover2.MCTOPLC.ACT.ActPos; //Gap Setting between the mover MoveOnTrackOption.gap:=200.0; CASE iStep OF cStepInit: pos1.SetValuesXY(x:=0,y:=0); pos2.SetValuesXY(x:=400,y:=0); GVL.tracks[1].AppendLine( commandFeedback:=GVL.commandFeedbacks[0] ,start:=pos1 ,end:=pos2 ); GVL.tracks[1].Enable(commandFeedback:=GVL.commandFeedbacks[1]); iStep :=cStepCheckTrackerEnabled; cStepCheckTrackerEnabled: IF GVL.tracks[1].MCTOPLC_STD.State = MC_PLANAR_STATE.Enabled THEN iStep := cStepEnableMovers; END_IF cStepEnableMovers: GVL.mover.Enable(commandFeedback:=GVL.commandFeedbacks[0]); GVL.mover2.Enable(commandFeedback:=GVL.commandFeedbacks[1]); iStep := cStepCheckMoversEnabled; cStepCheckMoversEnabled: IF GVL.mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled AND GVL.mover2.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled THEN iStep := cStepJoinTrack; END_IF cStepJoinTrack: GVL.mover.JoinTrack( commandFeedback:=GVL.commandFeedbacks[0] ,targetTrack:=GVL.tracks[1] ,constraint:=0 ,options:=0 ); GVL.mover2.JoinTrack( commandFeedback:=GVL.commandFeedbacks[0] ,targetTrack:=GVL.tracks[1] ,constraint:=0 ,options:=0 ); iStep := cStepCheckOnTrack; cStepCheckOnTrack: IF GVL.mover.MCTOPLC.STD.CommandMode = MC_PLANAR_MOVER_COMMAND_MODE.OnTrack AND GVL.mover2.MCTOPLC.STD.CommandMode=MC_PLANAR_MOVER_COMMAND_MODE.OnTrack THEN iStep := cStepMoveOnTrack; END_IF cStepMoveOnTrack: GVL.mover.MoveOnTrack( commandFeedback:=GVL.commandFeedbacks[0] ,targetTrack:=GVL.tracks[1] ,targetPositionOnTrack:=MoveOnTrackPosition1 ,constraint:=0 ,options:=MoveOnTrackOption ); GVL.mover2.MoveOnTrack( commandFeedback:=GVL.commandFeedbacks[0] ,targetTrack:=GVL.tracks[1] ,targetPositionOnTrack:=MoveOnTrackPosition2 ,constraint:=0 ,options:=MoveOnTrackOption ); iStep := cStepCheckPosition; cStepCheckPosition: IF GVL.mover.MCTOPLC.SETONTRACK.SetPos >= MoveOnTrackPosition1-0.1 AND GVL.mover2.MCTOPLC.SETONTRACK.SetPos >= MoveOnTrackPosition2-0.1 THEN iStep := cStepEnd; END_IF cStepEnd: END_CASE //Update GVL.mover.Update(); GVL.mover2.Update(); GVL.tracks[1].Update(); |
Result
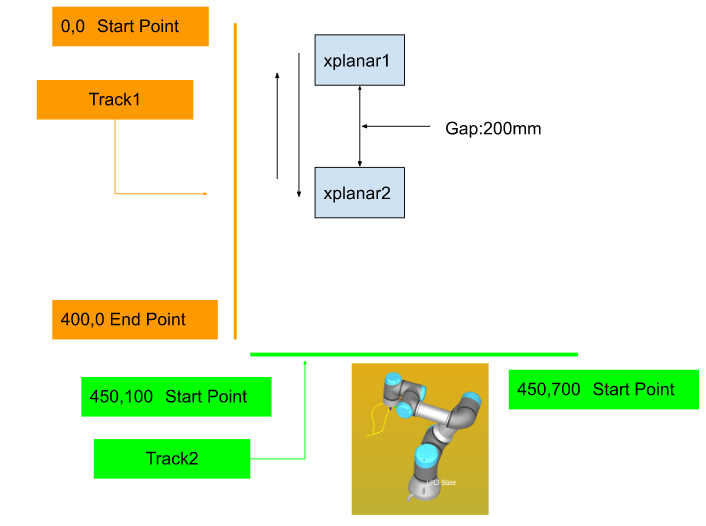
Implementation-2
Implementation-1ではTrackが2つあり、Xplanar1とXplanar2はそのTrack1にそって移動し、MoverがTrack1のEndついてたらTrack2に参加しRobotの手前に止まり、Robotが簡単Pickup動作するのDEMOです。
Reference Link
http://soup01.com/ja/category/%e3%83%ad%e3%83%9c%e3%83%83%e3%83%88/robodk/
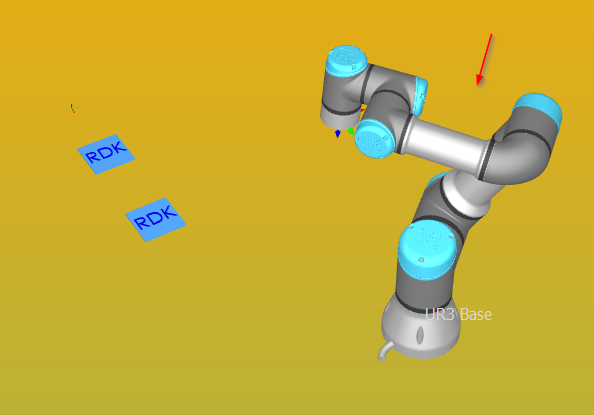
RoboDK
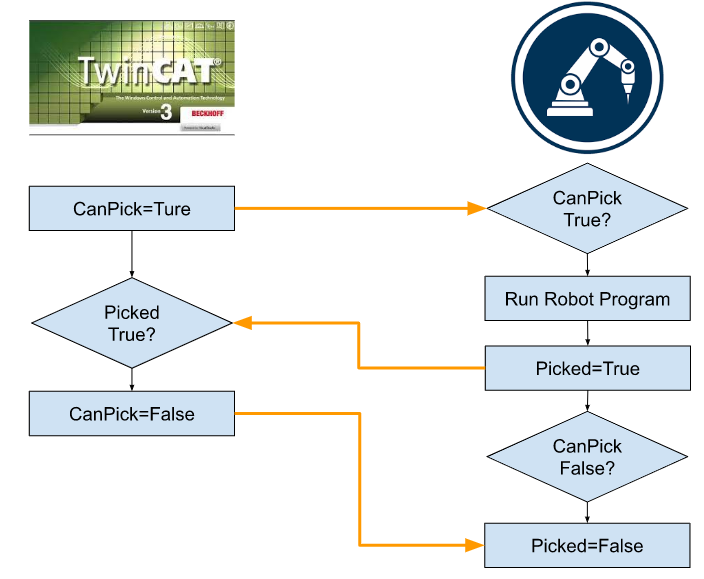
次はrobodk にロボットを追加し簡単な連動を作ろうと思ってます。こちらはtwincat とrobodk のhnadsharkになります。
まずtwincat からCanPick信号をロボットに送信し、ロボットがpick プログラムを実行します。ロボットがプログラム実行完了したらPicked の信号を返し自分のCanPick 信号をFalse に戻します。最後にロボット側もPicked 信号をFalse 信号にし、完了です。
Configuration
前回のTutorialと同じくもうひとつのPlateを追加し、名前を変えます。いまはxplanar1とxplaanr2の名前に変わりました。

次はロボットを追加します。
簡単なロボットプログラムを追加します。

Python
先程のTwinCAT連携Flowを追加するだけです。
| from robodk import robolink # RoboDK API from robodk import robomath # Robot toolbox from opcua import Client,ua RDK = robolink.Robolink() import time from robodk import * # RoboDK API from robolink import * # Robot toolbox def SetNodeValue(Node,value): DataType=Node.get_data_type_as_variant_type() DataValue=ua.DataValue(ua.Variant(value,DataType)) Node.set_data_value(DataValue) XPLANAR=’xplanar1′ XPLANAR2=’xplanar2′ UR3=’UR3′ ENDPOINT=”opc.tcp://DESKTOP-7FE1JP2:4840″ client=Client(ENDPOINT) NODES=’ns=4;s=GVL2RoboDK.xplanar1.pos.ActPos’ NODES2=’ns=4;s=GVL2RoboDK.xplanar2.pos.ActPos’ NODESUR_PICKED=’ns=4;s=GVL2RoboDK.Picked’ NODESUR_CANPICK=’ns=4;s=GVL2RoboDK.canPick’ PROG=’Prog2′ # Program example: xplanar = RDK.Item(XPLANAR) xplanar2 = RDK.Item(XPLANAR2) ur3=RDK.Item(UR3) robotprog=RDK.Item(PROG) if xplanar.Valid() and xplanar2.Valid() and ur3.Valid() and robotprog.Valid(): print(‘Item selected..’) client.connect() print(‘Connected to OPCUA server..’) NodeFromServer=client.get_node(NODES) NodeFromServer2=client.get_node(NODES2) NodeCanPick=client.get_node(NODESUR_CANPICK) NodePicked=client.get_node(NODESUR_PICKED) client.load_type_definitions() _busy=False; # while True: Actpos=NodeFromServer.get_value() CanPick=NodeCanPick.get_value() # CurrentPos=xyzrpw_2_pose([Actpos.x,Actpos.y,Actpos.z,Actpos.a,Actpos.b,Actpos.c]) xplanar.setPoseAbs(CurrentPos) #print(Actpos.x,Actpos.y,Actpos.z,Actpos.a,Actpos.b,Actpos.c) Actpos=NodeFromServer2.get_value() # CurrentPos=xyzrpw_2_pose([Actpos.x,Actpos.y,Actpos.z,Actpos.a,Actpos.b,Actpos.c]) xplanar2.setPoseAbs(CurrentPos) if not _busy and CanPick: value=robotprog.RunProgram() _busy=True if not robotprog.Busy() and _busy: SetNodeValue(NodePicked,True) _busy=False if not CanPick: SetNodeValue(NodePicked,False) print(_busy) print(‘CanPick=’,CanPick) #time.sleep(0.1) client.disconnect() |
TwinCAT3 Side
RoboDK Sideの準備が終わったところで、次はTwinCAT側ですね。
Confugaraton
2つのTrackがありますので、MC Project内でもう1つのPlanar Trackを追加します。

そしてGVLのObjectと紐つけてください。

Code
VAR
| PROGRAM MAIN_TrackExample2 VAR state : UDINT; pos1, pos2 : PositionXYC; MoveOnTrackOption:ST_MoveOnTrackOptions; MoveOnTrackOption2:ST_MoveOnTrackOptions; pos3:PositionXYC; postReset:BOOL; TON:TON; END_VAR VAR CONSTANT cStepInit :UDINT := 0; cStepCheckTrackerEnabled :UDINT := 10; cStepEnableMovers :UDINT := 20; cStepCheckMoversEnabled :UDINT := 30; cStepJoinTrack :UDINT := 40; cStepCheckOnTrack :UDINT := 50; cStepMoveOnTrack :UDINT := 60; cStepCheckPosition :UDINT := 70; cStepMover2JoinTrack2 :UDINT := 80; cStepCheckOnTrack2 :UDINT := 90; cStepMover2MoveOnTrack2 :UDINT := 100; cStepRobotCanPickMover2 :UDINT := 110; cStepWaitRobotDoneMover2 :UDINT := 120; cStepMover2MoveBack :UDINT := 130; cStepMover1JoinTrack2 :UDINT := 140; cStepMover1MoveOnTrack2 :UDINT := 150; cStepRobotCanPickMover1 :UDINT := 160; cStepWaitRobotDoneMover1 :UDINT := 170; cStepMover1MoveBack :UDINT := 180; cStepEnd :UDINT := 999; END_VAR |
PROGRAM
| //Sending Data to RoboDK by OPCUA GVL2RoboDK.xplanar1.pos.ActPos:=GVL.mover.MCTOPLC.ACT.ActPos; GVL2RoboDK.xplanar2.pos.ActPos:=GVL.mover2.MCTOPLC.ACT.ActPos; // MoveOnTrackOption.gap:=200.0; MoveOnTrackOption.direction:=1; CASE state OF cStepInit: pos1.SetValuesXY(x:=0,y:=0); pos2.SetValuesXY(x:=400,y:=0); GVL.tracks[1].AppendLine(commandFeedback:=GVL.commandFeedbacks[0],start:=pos1,end:=pos2); pos1.SetValuesXY(x:=450,y:=100); pos2.SetValuesXY(x:=450,y:=700); GVL.tracks[2].StartFromTrack(0,track:=GVL.tracks[1]); GVL.tracks[2].AppendLine(commandFeedback:=GVL.commandFeedbacks[2],start:=pos1,end:=pos2); GVL.tracks[2].EndAtTrack(0,track:=GVL.tracks[1]); pos3.x:=200; pos3.y:=0; GVL.mover2.SetPosition(0,pos3); state := cStepCheckTrackerEnabled; cStepCheckTrackerEnabled: GVL.tracks[1].Enable(commandFeedback:=GVL.commandFeedbacks[1]); GVL.tracks[2].Enable(commandFeedback:=GVL.commandFeedbacks[3]); IF GVL.tracks[1].MCTOPLC_STD.State = MC_PLANAR_STATE.Enabled AND GVL.tracks[2].MCTOPLC_STD.State = MC_PLANAR_STATE.Enabled THEN state := cStepEnableMovers; END_IF cStepEnableMovers: GVL.mover.Enable(commandFeedback:=GVL.commandFeedbacks[0]); GVL.mover2.Enable(commandFeedback:=GVL.commandFeedbacks[1]); state := cStepCheckMoversEnabled; cStepCheckMoversEnabled: IF GVL.mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled AND GVL.mover2.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled THEN state := cStepJoinTrack; END_IF cStepJoinTrack: GVL.mover.JoinTrack(0, GVL.tracks[1], 0, 0); GVL.mover2.JoinTrack(0, GVL.tracks[1], 0, 0); state := cStepCheckOnTrack; cStepCheckOnTrack: IF GVL.mover.MCTOPLC.STD.CommandMode = MC_PLANAR_MOVER_COMMAND_MODE.OnTrack AND GVL.mover2.MCTOPLC.STD.CommandMode=MC_PLANAR_MOVER_COMMAND_MODE.OnTrack THEN state := cStepMoveOnTrack; END_IF cStepMoveOnTrack: GVL.mover.MoveOnTrack( commandFeedback:=GVL.commandFeedbacks[0] ,targetTrack:=GVL.tracks[1] ,targetPositionOnTrack:=150.0,constraint:=0 ,options:=MoveOnTrackOption ); GVL.mover2.MoveOnTrack( commandFeedback:=GVL.commandFeedbacks[0] ,targetTrack:=GVL.tracks[1] ,targetPositionOnTrack:=350.0 ,constraint:=0 ,options:=MoveOnTrackOption ); state := cStepCheckPosition; cStepCheckPosition: IF GVL.mover.MCTOPLC.SETONTRACK.SetPos >= 149.9 AND GVL.mover2.MCTOPLC.SETONTRACK.SetPos >= 349.9 THEN state:=cStepMover2JoinTrack2; END_IF cStepMover2JoinTrack2: GVL.mover2.JoinTrack(0, GVL.tracks[2], 0, 0); state := cStepCheckOnTrack2; cStepCheckOnTrack2: IF GVL.mover2.MCTOPLC.STD.CommandMode=MC_PLANAR_MOVER_COMMAND_MODE.OnTrack THEN state := cStepMover2MOveOnTrack2; END_IF cStepMover2MOveOnTrack2: GVL.mover2.MoveOnTrack(commandFeedback:=GVL.commandFeedbacks[0],GVL.tracks[2],targetPositionOnTrack:=250,constraint:=0,options:=MoveOnTrackOption); //test—- GVL.mover.MoveOnTrack(commandFeedback:=GVL.commandFeedbacks[0],GVL.tracks[2],targetPositionOnTrack:=250,constraint:=0,options:=MoveOnTrackOption); TON(IN:=TRUE,PT:=T#1S); IF TON.Q THEN IF GVL.mover2.MCTOPLC.SETONTRACK.SetPos>=249.9 AND GVL2RoboDK.xplanar2.pos.ActPos.x>=450.0 AND GVL2RoboDK.xplanar2.pos.ActPos.y>=222.0 THEN TON(IN:=FALSE); state:=cStepRobotCanPickMover2; END_IF END_IF; cStepRobotCanPickMover2: GVL2RoboDK.canPick:=TRUE; TON(in:=TRUE,PT:=T#0.2S); IF TON.Q THEN TON(IN:=FALSE); state:=cStepWaitRobotDoneMover2; END_IF cStepWaitRobotDoneMover2: IF GVL2RoboDK.Picked THEN GVL2RoboDK.canPick:=FALSE; state:=cStepMover2MoveBack; END_IF; cStepMover2MoveBack: GVL.mover2.MoveOnTrack(commandFeedback:=GVL.commandFeedbacks[0],GVL.tracks[2],targetPositionOnTrack:=0,constraint:=0,options:=MoveOnTrackOption); IF GVL.mover2.MCTOPLC.SETONTRACK.SetPos>=599.9 THEN state:=cStepMover1JoinTrack2; END_IF cStepMover1JoinTrack2: GVL.mover.JoinTrack(0, GVL.tracks[2], 0, 0); IF GVL.mover.MCTOPLC.STD.CommandMode=MC_PLANAR_MOVER_COMMAND_MODE.OnTrack THEN state := cStepMover1MoveOnTrack2; END_IF cStepMover1MoveOnTrack2: GVL.mover.MoveOnTrack(commandFeedback:=GVL.commandFeedbacks[0],GVL.tracks[2],targetPositionOnTrack:=250,constraint:=0,options:=MoveOnTrackOption); IF GVL.mover.MCTOPLC.SETONTRACK.SetPos>=249.9 AND GVL2RoboDK.xplanar1.pos.ActPos.x>=450.0 AND GVL2RoboDK.xplanar1.pos.ActPos.y>=222.0 THEN state:=cStepRobotCanPickMover1; END_IF cStepRobotCanPickMover1: GVL2RoboDK.canPick:=TRUE; state:=cStepWaitRobotDoneMover1; cStepWaitRobotDoneMover1: IF GVL2RoboDK.Picked THEN GVL2RoboDK.canPick:=FALSE; state:=cStepMover1MoveBack; END_IF cStepMover1MoveBack: GVL.mover.MoveOnTrack(commandFeedback:=GVL.commandFeedbacks[0],GVL.tracks[2],targetPositionOnTrack:=0,constraint:=0,options:=MoveOnTrackOption); IF GVL.mover.MCTOPLC.SETONTRACK.SetPos>=599.9 THEN state:=cStepMover2MOveOnTrack2; END_IF END_CASE GVL.mover.Update(); GVL.mover2.Update(); GVL.tracks[1].Update(); GVL.tracks[2].Update(); |
Result
Soure Code
以下のLinkからプロジェクトをダウンロードしてください。
https://github.com/soup01Threes/TwinCAT3/blob/main/TwinCAT%20Project%20xplarn2.zip