このシリーズではWittensteinのcyber® simco® drive 2とcyber® dynamic lineを使用し試運転からPLCと繋がるまでを紹介します。第2話ではBeckhoff TwinCAT NCを利用し Wittensteinのcyber® simco®とPROFIdriveで通信してみます。
TwinCAT NCはFieldbus やHardwareに依存せず、End-Userは自分のアプリケーションに合わせてDriveとServo Motorを使用しながら同じプログラムを運用できます。
Beckhoff TwinCATのMotion Control Function blockではPLC OPEN標準(V1.0/V2.0)に準じて作られています。
よろしくお願いします。

About cyber simco drive 2 and profinet..
simco driveはSiemensのPLCと100% Compatibleですが、PROFIdriveのProfileさえSupportできればBeckoff TwinCATからでも制御できるのではないか?と思っています。
- RT/IRTも対応可能
- 最短Cycle Timeは1ms
- 以下のTelegramがSupportします
- Telegram1/2:速度制御
- Telegram3:速度制御、Position値がFeedback
- Telegram5:DSC(Dynamic Servo Control)
- Telegram9:MDIからのPositioning
- Telegram105:DSCなおかつトルク制御
Thanks!
この記事はBeckhoff JapanとWittenstein Japanが機材を貸してくださったおかけです。
ベッコフ日本法人ベッコフオートメーション株式会社
IPC6920-005・EL6910・EL1904はベッコフ日本法人ベッコフオートメーション株式会社さまが貸してくださったものです。Beckhoff Automationは1980 年会社設立、PCベースの制御技術をベースにしたオープンオートメーションシステム導入の先頭に立つドイツ企業です。
ベッコフ日本法人ベッコフオートメーション株式会社は、2011年に横浜に本社、2017年に名古屋オフィスを設立しました。

Address
横浜オフィス(本社)
ベッコフオートメーション株式会社
〒231-0062
神奈川県横浜市 中区桜木町1-1-8
日石横浜ビル18階
HP
こちらはベッコフ日本法人ベッコフオートメーション株式会社様のホームページです。
どうぞよろしくお願いします。
https://www.beckhoff.com/ja-jp/
Wittenstein
WITTENSTEIN cyber motor は、高度な技術が求められるサーボモータと駆動用電子部品に加えて、非常に大きな出力密度を発揮する完結型メカトロニクス駆動システムの開発および製造を行っています。 超高真空、高温環境、放射能環境に対応する特殊モータの専門技術も保有しています。

Address
ヴィッテンシュタイン・ターナリー株式会社
〒386-0005
長野県上田市古里99-5
HP
https://cyber-motor.wittenstein.jp/
Reference Link
こちらはWittensteinのDriveをSoftware MotionGUI2を使って試運転する記事です。
こちらはTwinCATとSiemensのS210 DriveとProfinetで連携する記事です。
立ち上げからCloud Connectまでの説明もあります。
TwinCAT NC?
TwinCAT NC(Numerial Control)はSoftwareだけのMotion Controlであり従来のMotion Controlの機能やモジュールは似ていますが、TwinCAT NCはPLCと同じのCPU上で稼働してるため、より直接・高速・簡単でMotion 制御を行うことができます。
それ以外にTwinCAT NCはHardwareに依存せず、End-Userは自分のアプリケーションに合わせてDriveとServo Motorを使用しながら同じプログラムを運用できます。
Beckhoff TwinCATのMotion Control Function blockではPLC OPEN標準(V1.0/V2.0)に準じて作られています。
制御クラスではTwinCAT NCはPTPとNC2つのクラスがあります。
PTP=Point to Pointで単軸制御・定速・2軸同期など簡単タスクで、そのほかDacner Control/Flying Saw/FIFOなど多彩な多軸制御も可能です。
もちろん、UserはPLC側でTarget値・速度・加速度などを計算しながらNCに更新することもできます。
NC1はPTPの機能をすべて実装した上、G CODEからプログラム作成でき、多軸の複雑な制御もできます。
TwinCAT NC PTPTはSoftwareのMotion Controlなので、理論上で最大255軸まで制御が可能です。もちろん、実際のアプリケーションではTwinCATが制御できる軸数はCPUの速度やNCの更新周期など、様々な要素に左右されることもあります。
TwinCATは多彩なServo TypeをSupportし、Fieldbus にはEtherCAT・SERCOS・CANOPEN(DS402)・LightBUS・ProfiDriveのような異なるメーカーのServoでもTwinCATの視点から見ても同じDriveです。他にModule KL2531/KL2541・EL7031/EL7041・EL7201のようなBeckoffのServoモジュールなどもTwinCAT NCに対応します。

Download the GSDML File
Profinet networkを構築するにはGSDML Fileが必要です。そしてGSDMLは場合によってIO DevicesのFirmwareと分けるときもあります。
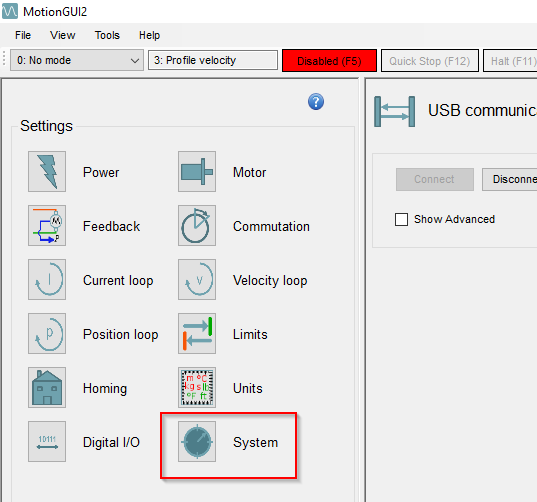
まずDriveのFirmwareをMotionGUI2ツールから確認します。
Settings>Systemをクリックします。
Software versionが02.06.01です。
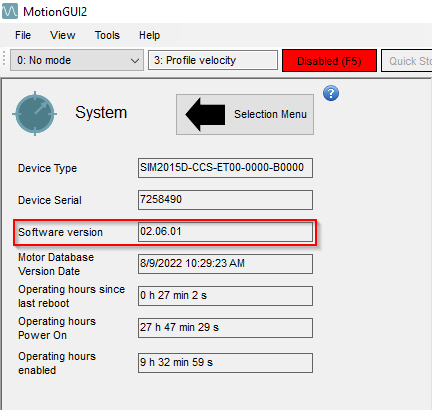
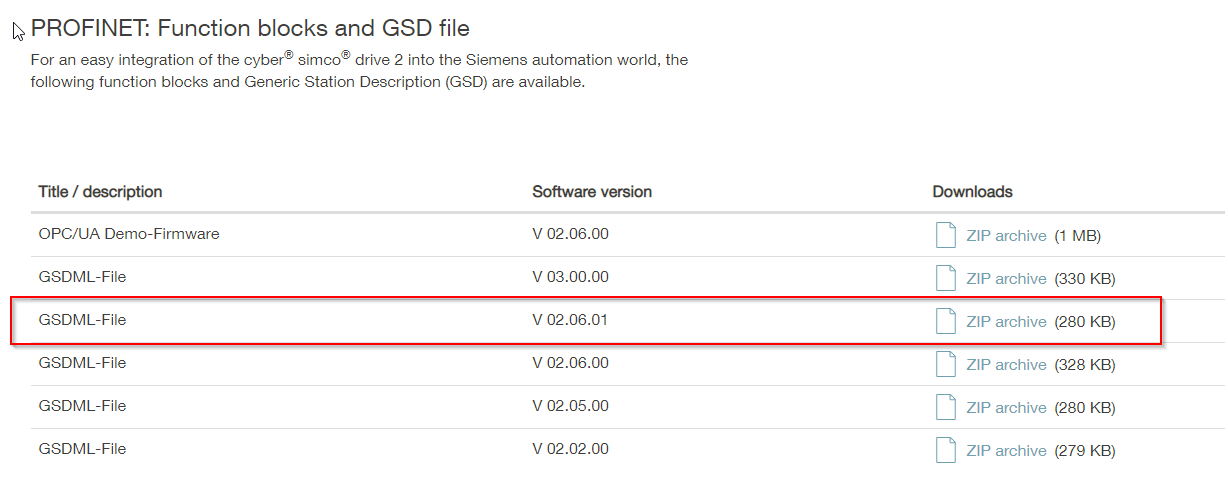
次はWittensteinのHPから02.06.01 FirmwareのGSDMLをDownloadしてください。
Impelemenation
Add Profinet IO Controller
まずはProfinet IO Controllerを追加します。I/O>Devices>Add New Itemします。

Profinet>Select Profinet IO Controller>Okします。

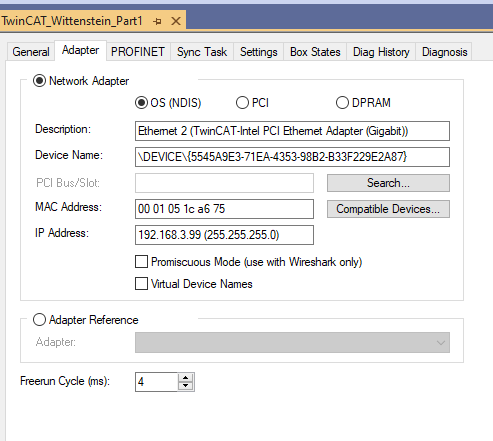
Adapter Configuration
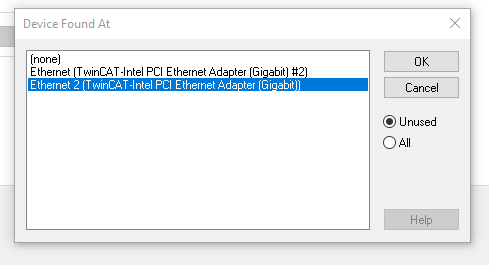
ProfinetのNetwork Adapterを設定します。AdapterのTabから”Search”ボタンをクリックします。

適切なNetwork Adapterを選びましょう。
Done!
Sync Task
次はProfinet IO用のTaskを作成します。
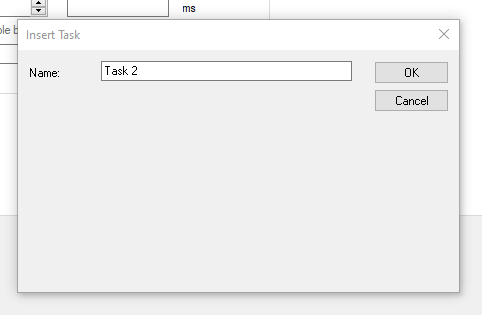
Sync Task>Special Sync Task>Create new I/O Taskします。
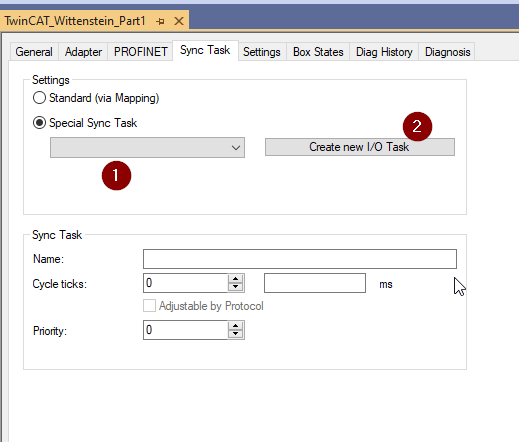
Task名を入力します。
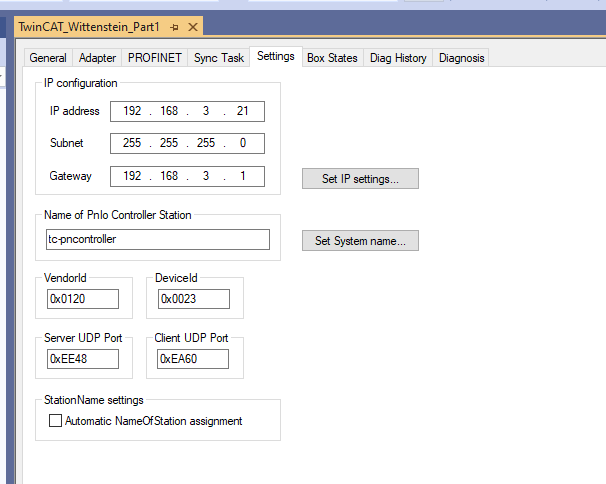
IP Configuration
TwinCAT Profinet IO ControllerのIP ConfigurationをSettings Tabから設定できます。Network 内で重複しないように。
Install the GSDML File
先程DownloadしたGSDML Fileを以下のDirectoryに入れてください。C:\TwinCAT\3.1\Config\Io\Profinet

Add the Drive
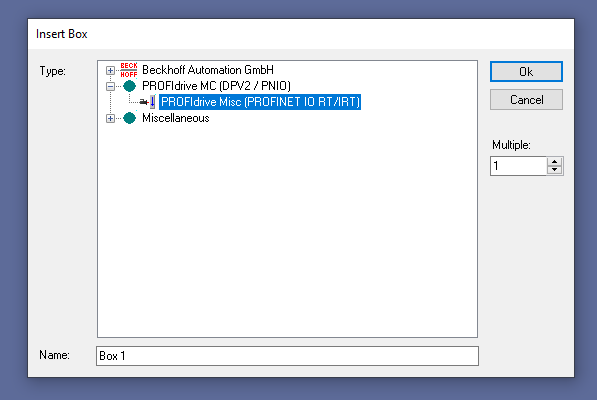
Device>Add New ItemでWittensteinのServo Driveを追加します。

PROFIdrive MC(DPV2 /PNIO)>PROFIdrive Misc(PROFINET IO RT/IRT)を選び>Okします。
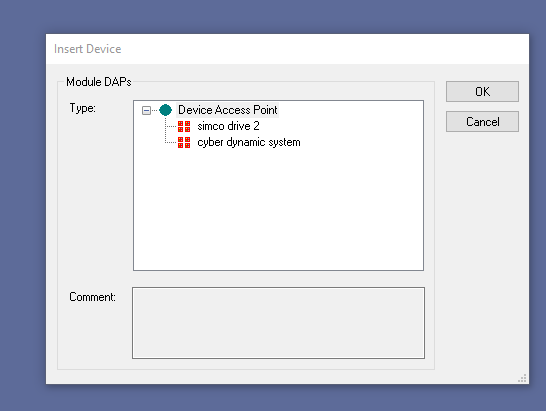
先程のGSDMLを選び>Openします。

Device Access Pointを設定します。今回はSimco drive2を選び>Okします。
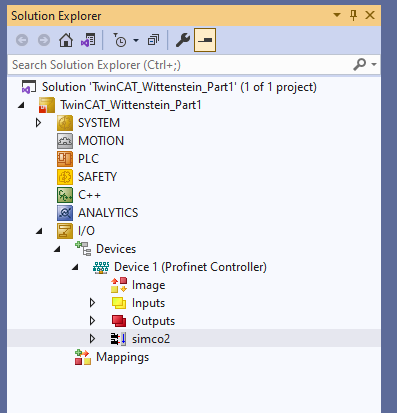
Done!Driveが追加されました。
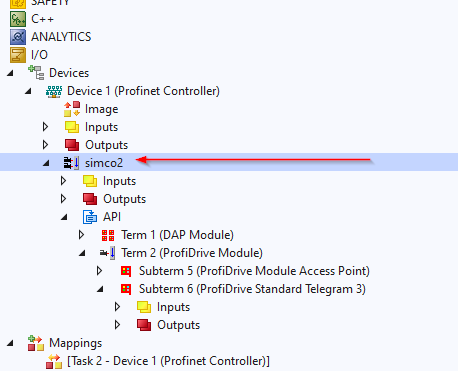
Configure the Telegram
次はPROFIdriveのTelegramを設定します。Default上でTelegram1になっています。

Term 2 (ProfiDrive Module)を右クリック>Add New Itemします。
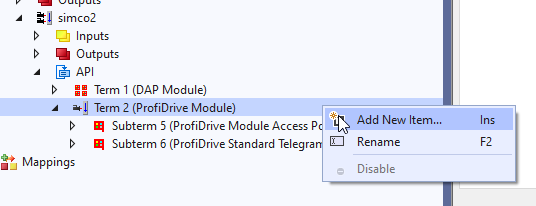
Device Configuration画面が表示され、各Subslotを構築できます。
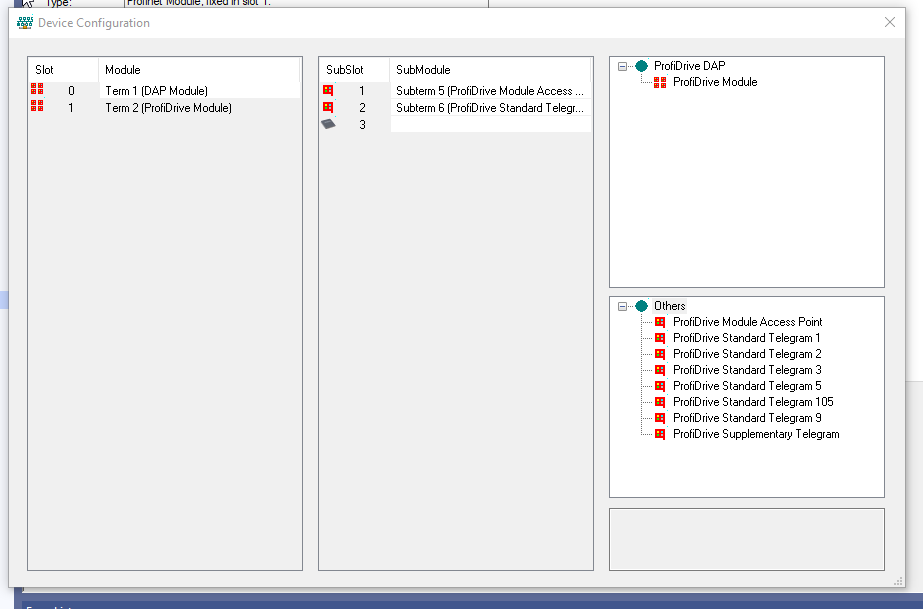
とりあえずDefaultのTelegram1を削除します。
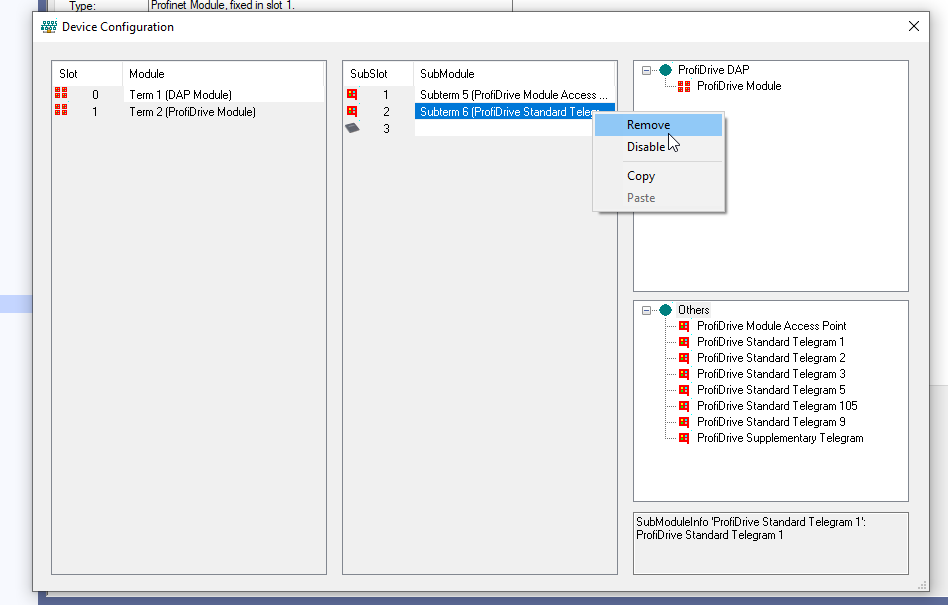
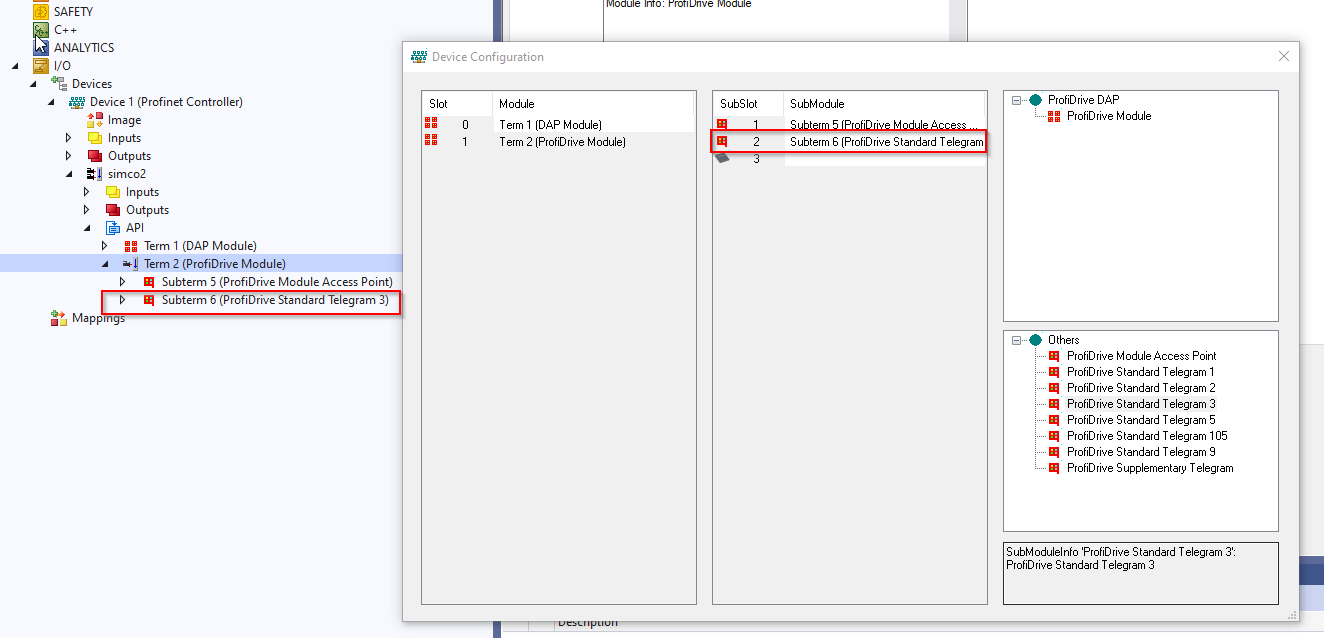
次はは右にあるOthersからProfiDrive 3をダブルクリックしてSubmodules に追加します。

Done!
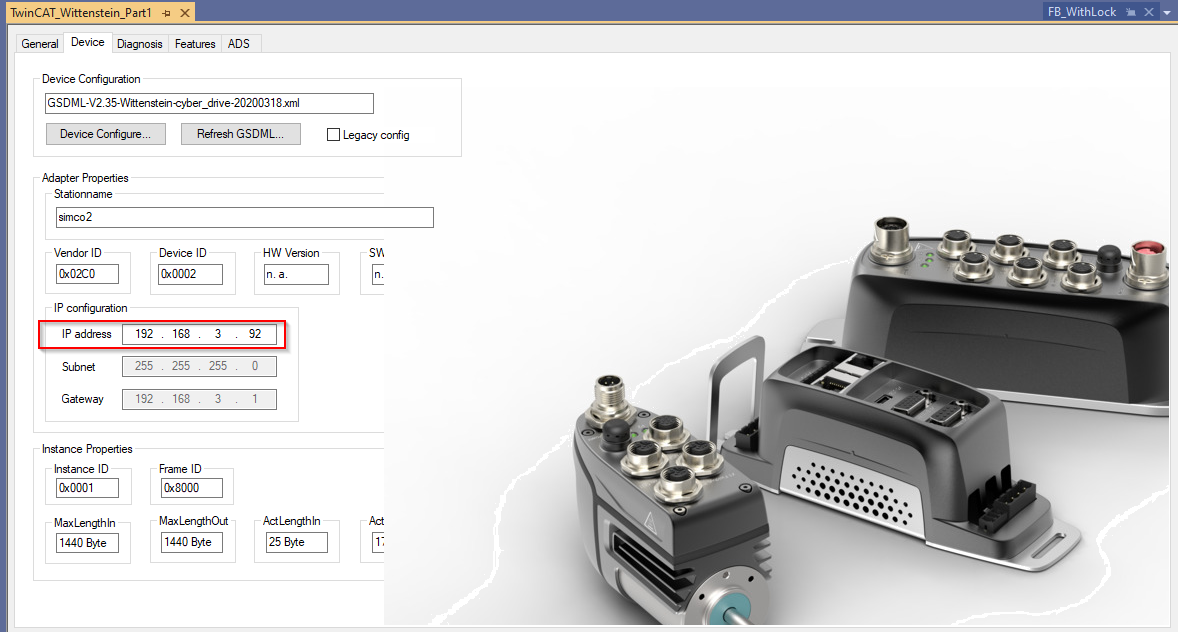
IP Configuration
次はDriveのIPアドレス設定ですね。
DeviceのTabからIPを設定してください。ProfinetではIO Controlelrが各Deviceの名前からDCP Protocol使用しIPを割り付けます。
Device Name
General TabからNameのFieldからHardware Configuration上のProfinet IO Device名を変更できます。

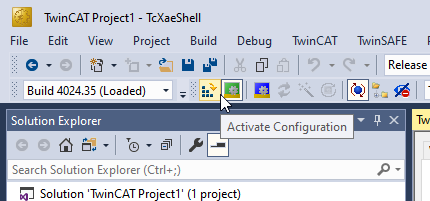
Download
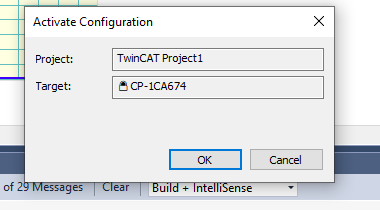
準備終わったら、Activate ConfigrationでHardware ConfigurationをRuntimeにDownloadしましょう。
OKで進みます。
TwinCAT Runtimeを再起動します。
Assign Device Name
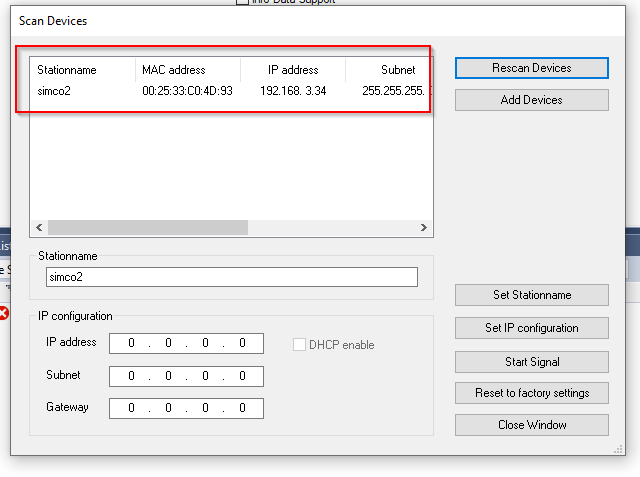
最後はTwinCAT3からDriveにDevice名を振ったら完成です。最初に追加したProfinet IO Controllerをクリックし、TabからPROFINETを展開し、”Scan PNIO Devices”します。
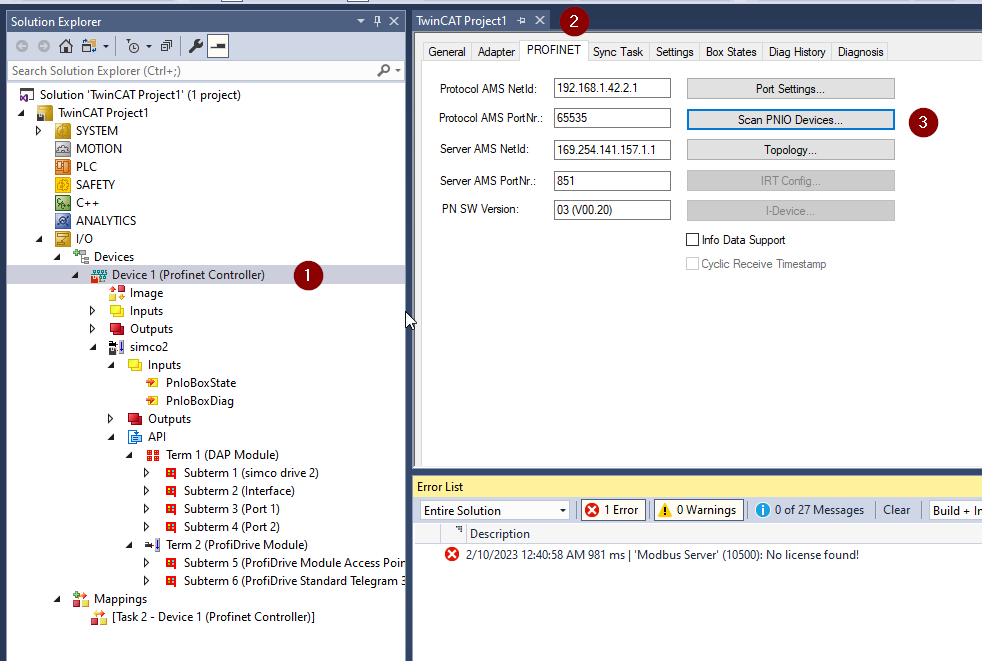
Driveが見つかりました。

ですが、Hardware ConfigurationではDriveの名前はsimco2だと設定しましたが、実物のDevice名はsimco なのでもちろんTwinCATからはこのProfinet IO Deviceのことを認識できませんね。

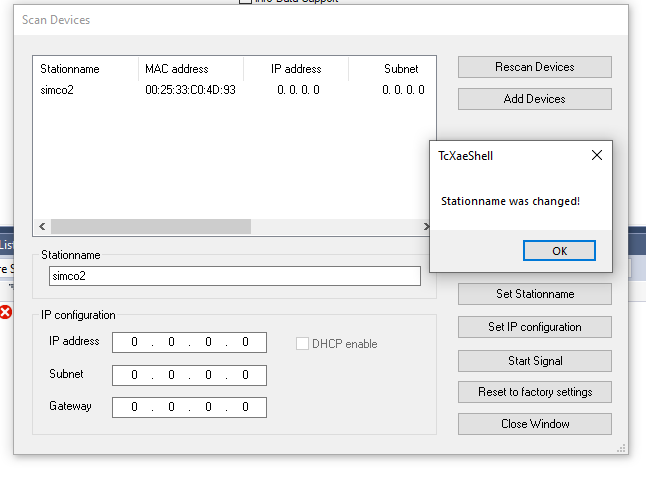
StationnameのFieldにプロジェクトに合わせてsimcoに設定し、”Set Stationname”でTwinCATからDeviceをふってあげます。

Done!
Rescan Devicesのボタンをクリックしもう一度IO Devicesを検索します。
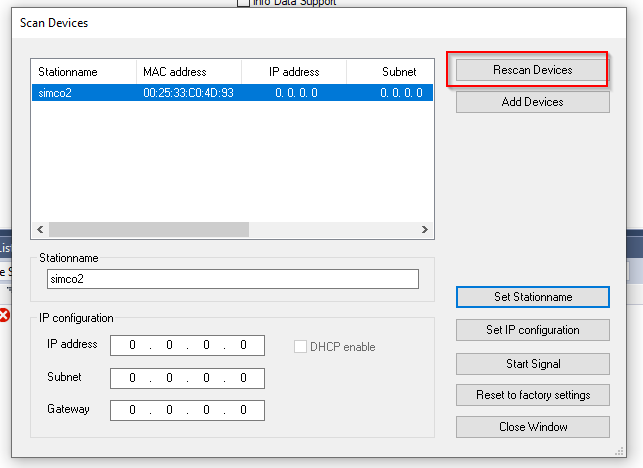
Done!IPアドレスが自動的TwinCATからDriveに振りました。
Result
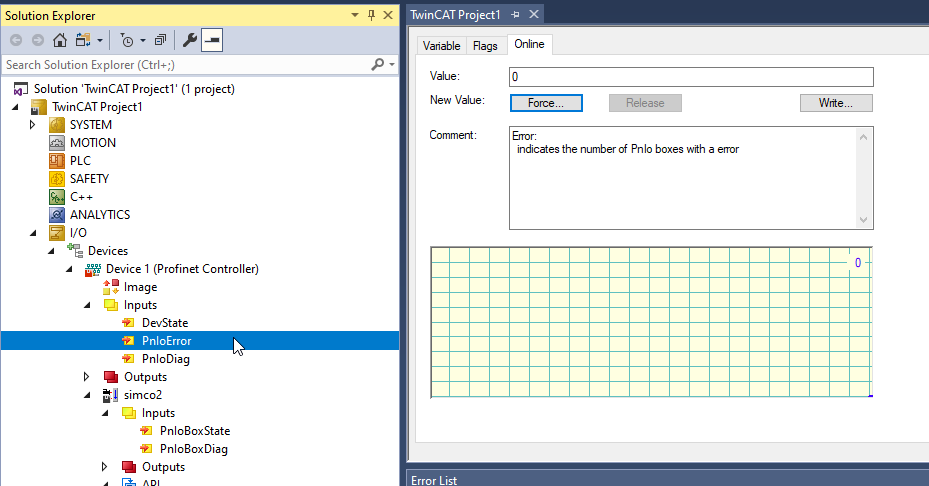
では結果を確認してみましょう。まずProfinet IO Controller側です。DevState=0、つまりエラーなし。

PnIoError=0、つまりエラーなし。
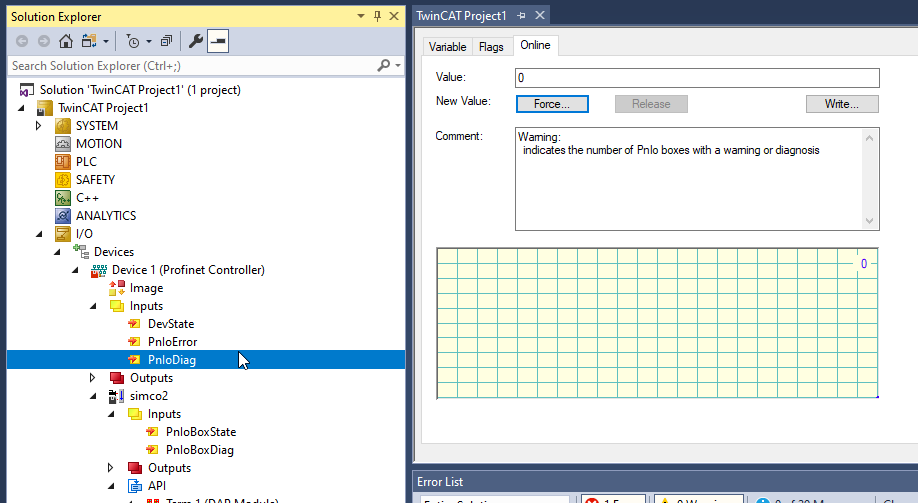
PnIoDiag=0、つまりエラーなしです。
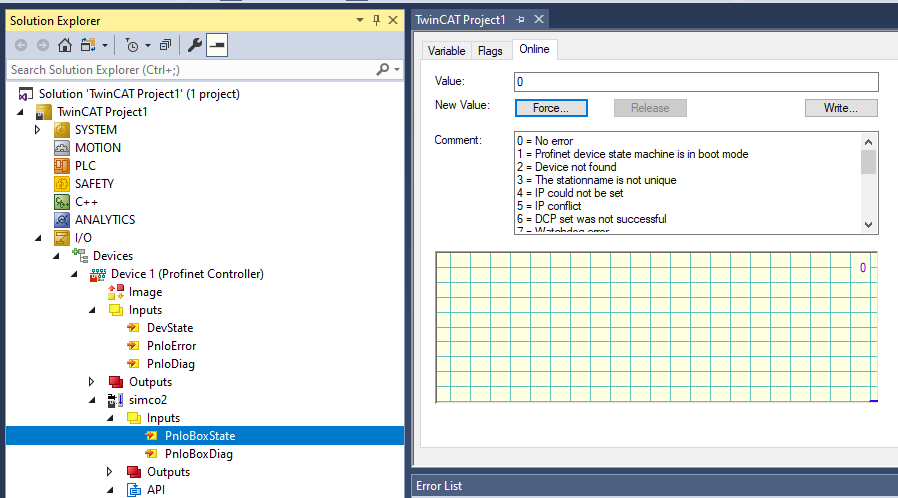
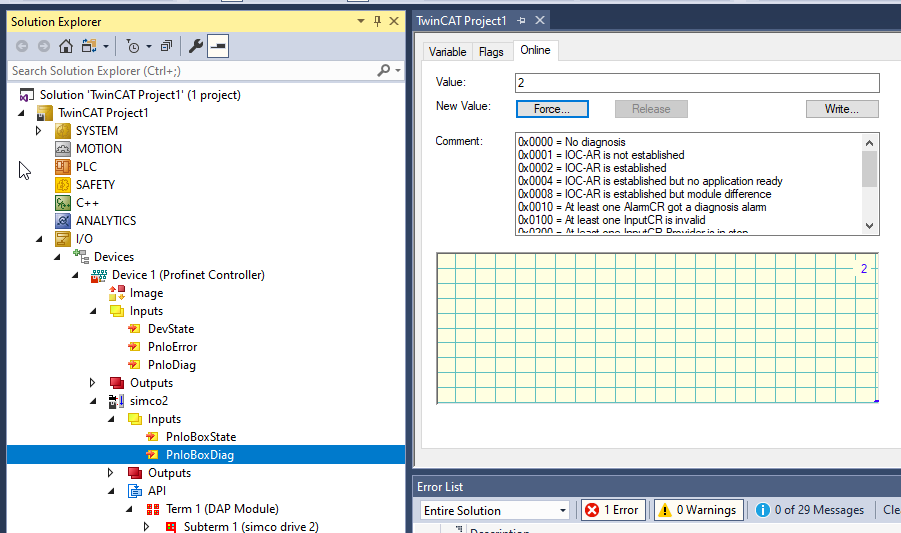
次はIO Devicesの変数を確認します。
PnIoBoxState=0、つまりIO Devices(WittensteinのDriveが認識されました)
そしてPnIoBoxDiag=2、つまり接続が確認されています。
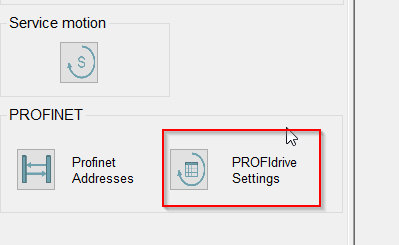
MotionGUI2のソフトからも接続状態を確認できます。
まずProfinet Addressをクリックします。

Name of StationはTwinCAT3から設定した名前と同じく、Ipも確認できました。

次はPROFIdriveをクリックします。
Telegram番号も、3になっています。
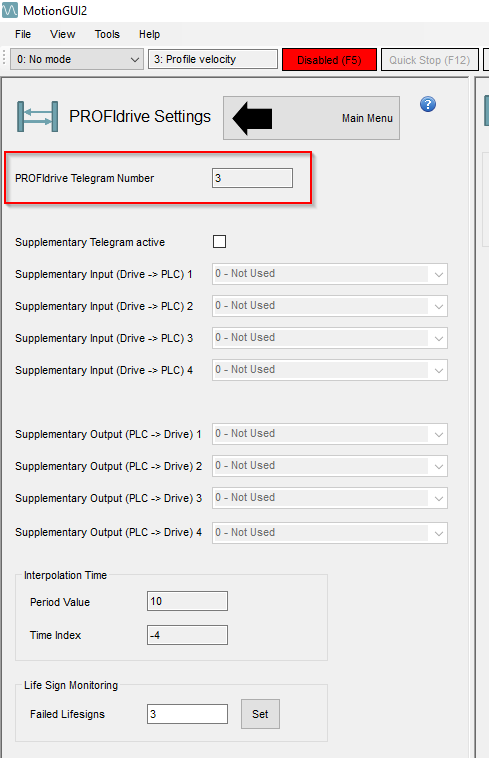
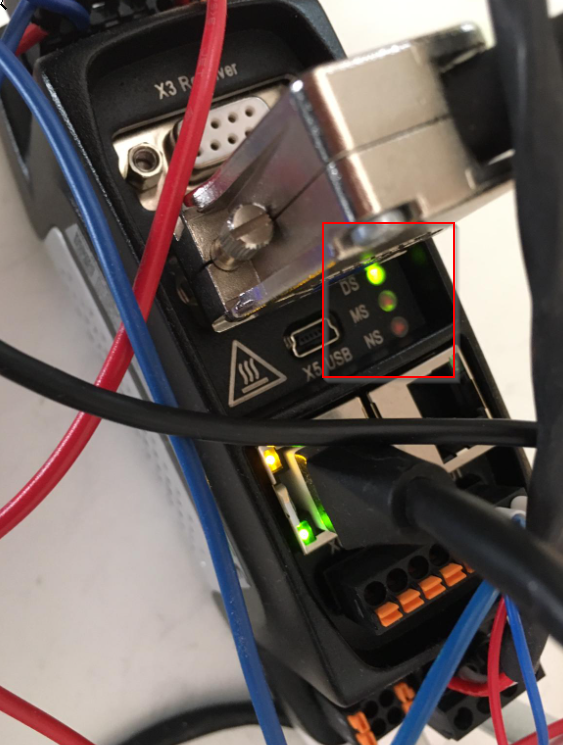
DS LEDも緑点滅しています。