今回はFANUCのROBOGUIDEをEthernet IP Adapterとして立ち上げ、Codesys Runtimeが入ってるRaspberryと通信します。よろしくおねがいします。設定箇所が多いだけで、難しいことはありません。
Options
Cellを作成するときはR784 Optionsを入れてください。

FANUC のIN/OUT
主にあるIN/OUTを紹介します。
Analog(AI/AO)
つまりアナログの入出力です。
Digital(DI/DO)
ON/OFFのみのバイナリデータです。
Robot I/O(RI/RO)
ControllerとRobot間の通信エリア。それらのシグナルの数はロボットの軸数によります。
Group I/O(GI/GO)
1つ以上のDI/DOシグナルを整数としてGroupできます。
UOP(UI/UO)
PLCと通信するときに使われているエリアになります。
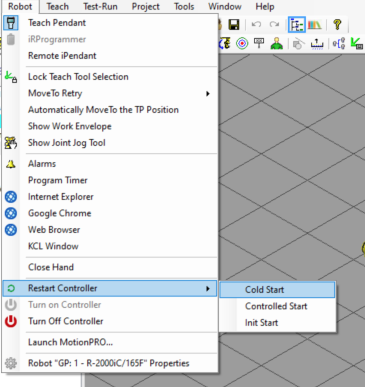
Robot Controllerリセット
設定途中で何回も電源再起動といわれるときがありますので、ROBOGUIDEではRobot>Restart Controller>Cold Startでリセットできます。
EDS Export
FILE>FILEをクリックします。

Backupを押します。
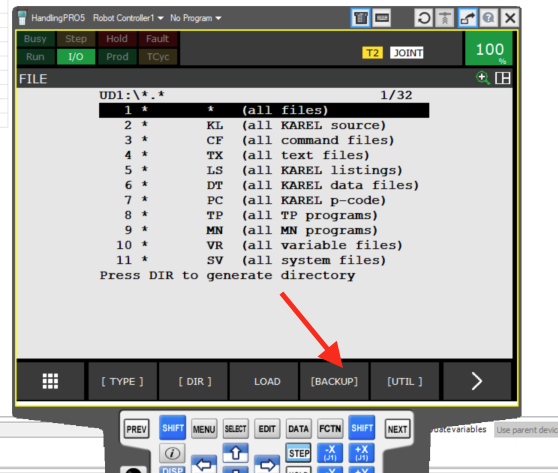
2 Com.Conf.を選択します。

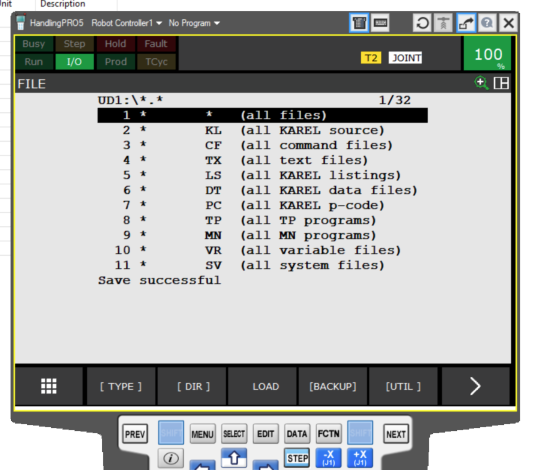
下に”Save successful”のメッセージ出たらOKです。
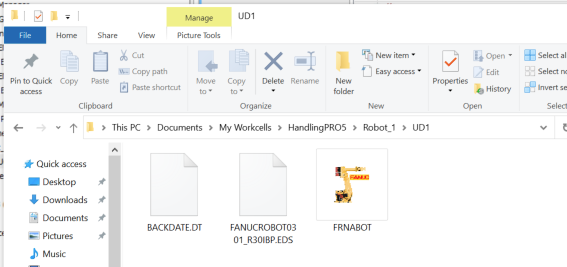
Documents>MyWorkcells>YourProjectName>Robot_1>UD1にEDSが出てきます。
そこからScannerにImportしてください。
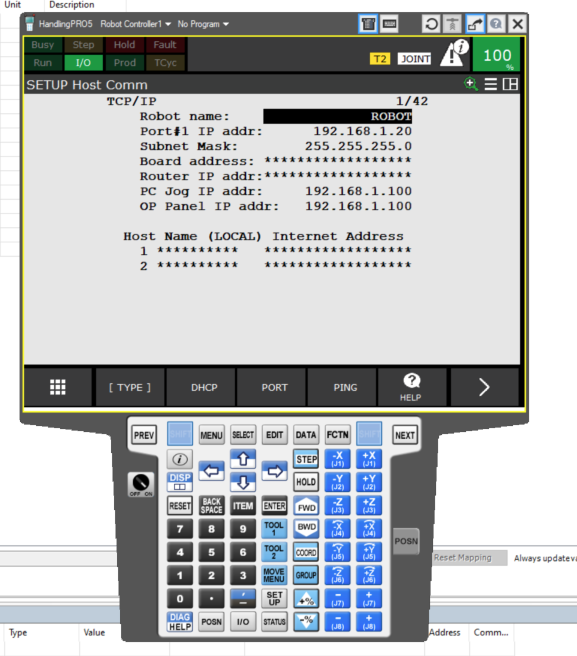
Host Comm SETUP
SETUP>SETUP2>8 Host Commのメニューを開きます。

1 TCP/IPを選択します。

Port#1 IP AddrなどでIP、Subnetを設定します。
Ethernet/IP Setup
I/O>EtherNET/IPを開きます。
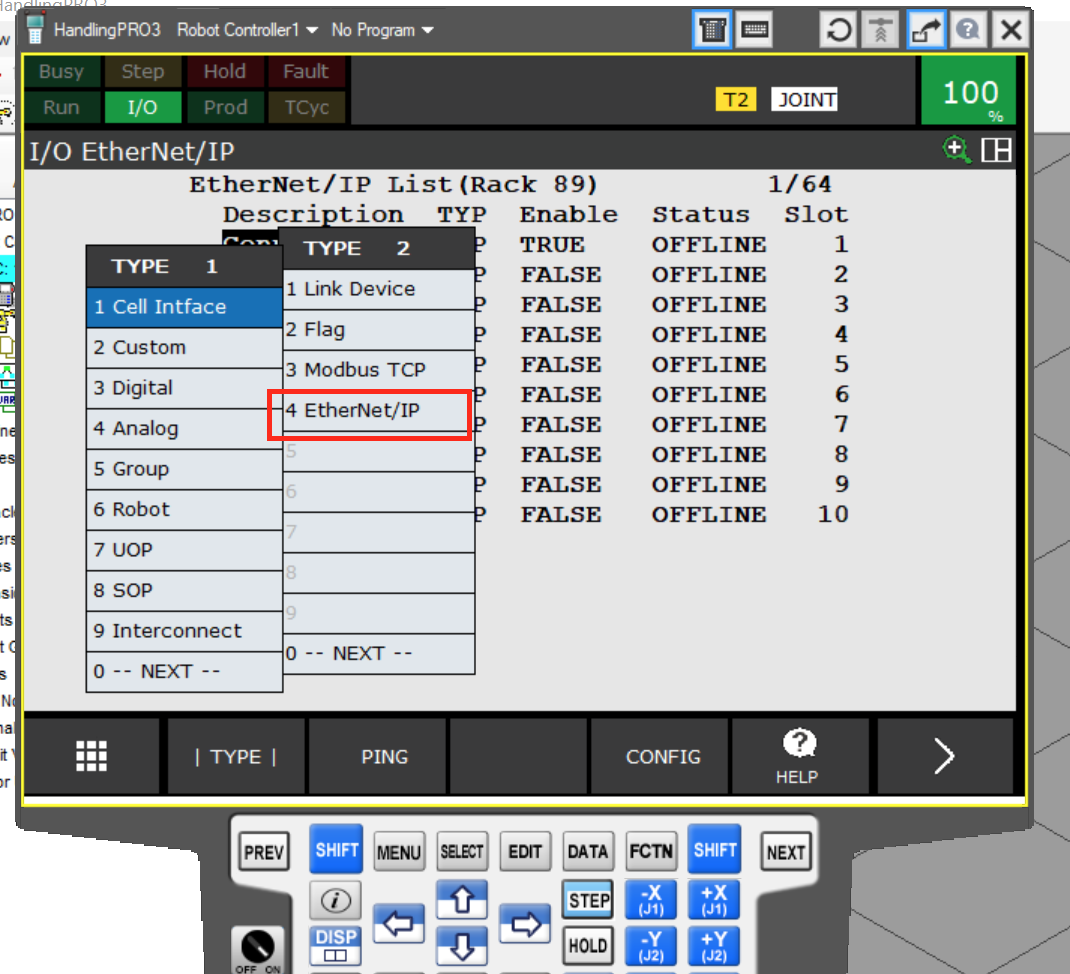
各Connectionの設定がありますが、今回使うの1番だけです。
ADP=Adapterになります。
EnableをTrueになると設定が変えないので一旦Falseしてください。

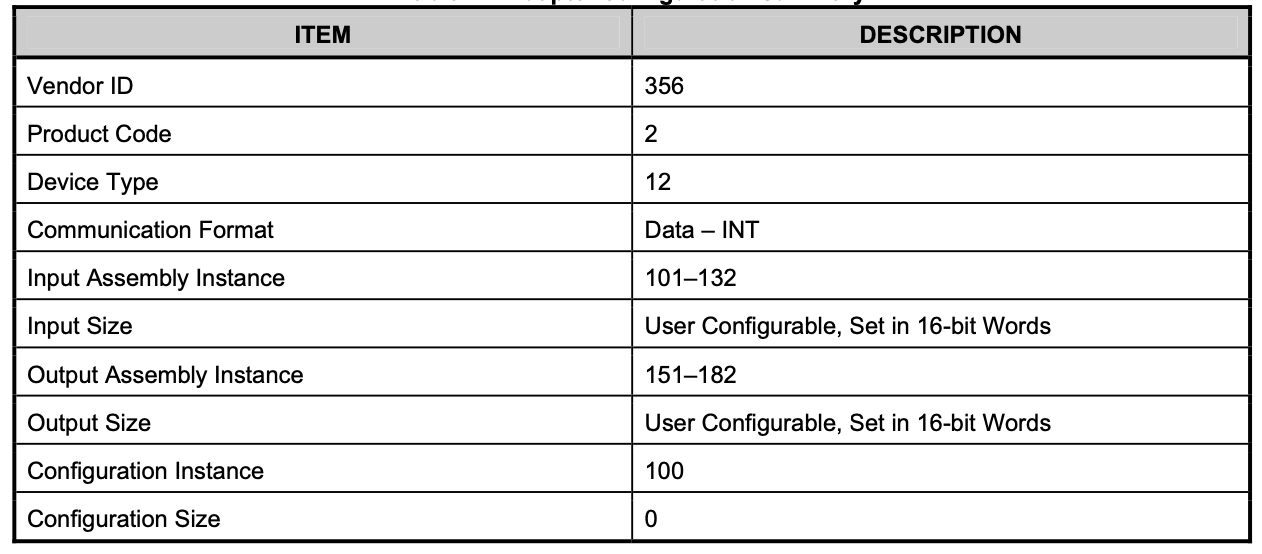
Adpater構成
STATUS
OFFLINE
Connectionは無効されています。
ONLINE
Connection有効されたがActivateしてない。
RUNNING
Connection有効されなおかつI/O Exchangeしてる。
<RUNNING>
Connection有効され、I/O Exchangeされてる、なおかつ自動再接続するように。
PENDING
構成が変更されました。Robot Controllerリセット必要。
Slot
DI/DOなどのシグナルをMappingするときに使用します。
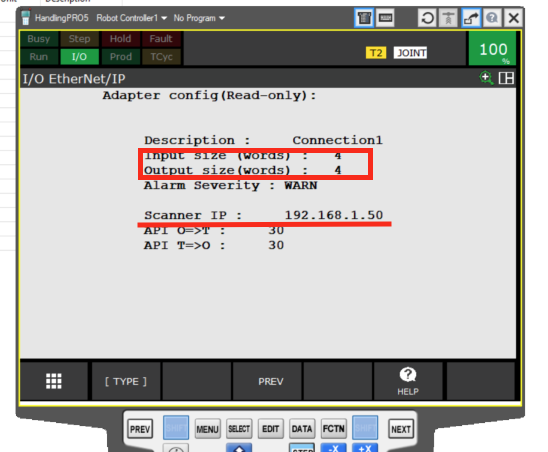
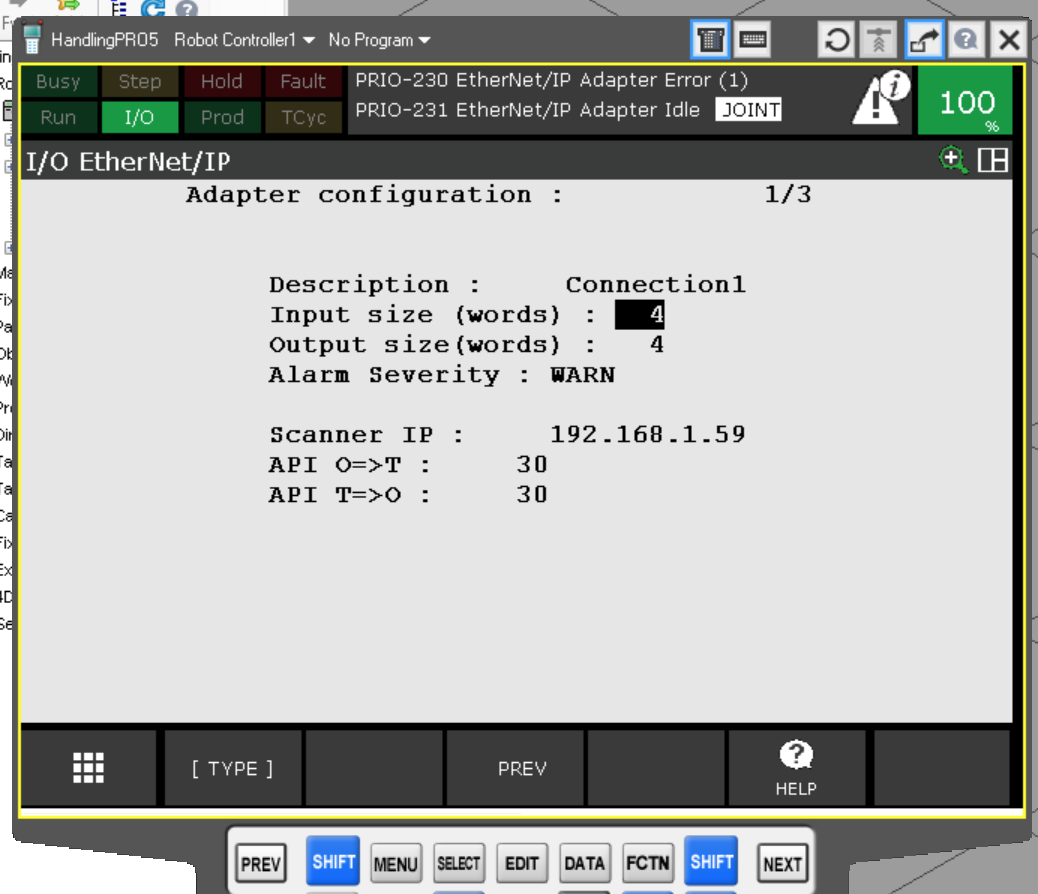
CONFIGボタンでConnection設定画面に入ります。

Input sizeとOutput sizeは4つのWordつづですね。
Scanner側にもそれに合わせて置きましょう。
Scanner IPはScannerのIPと一致してください。
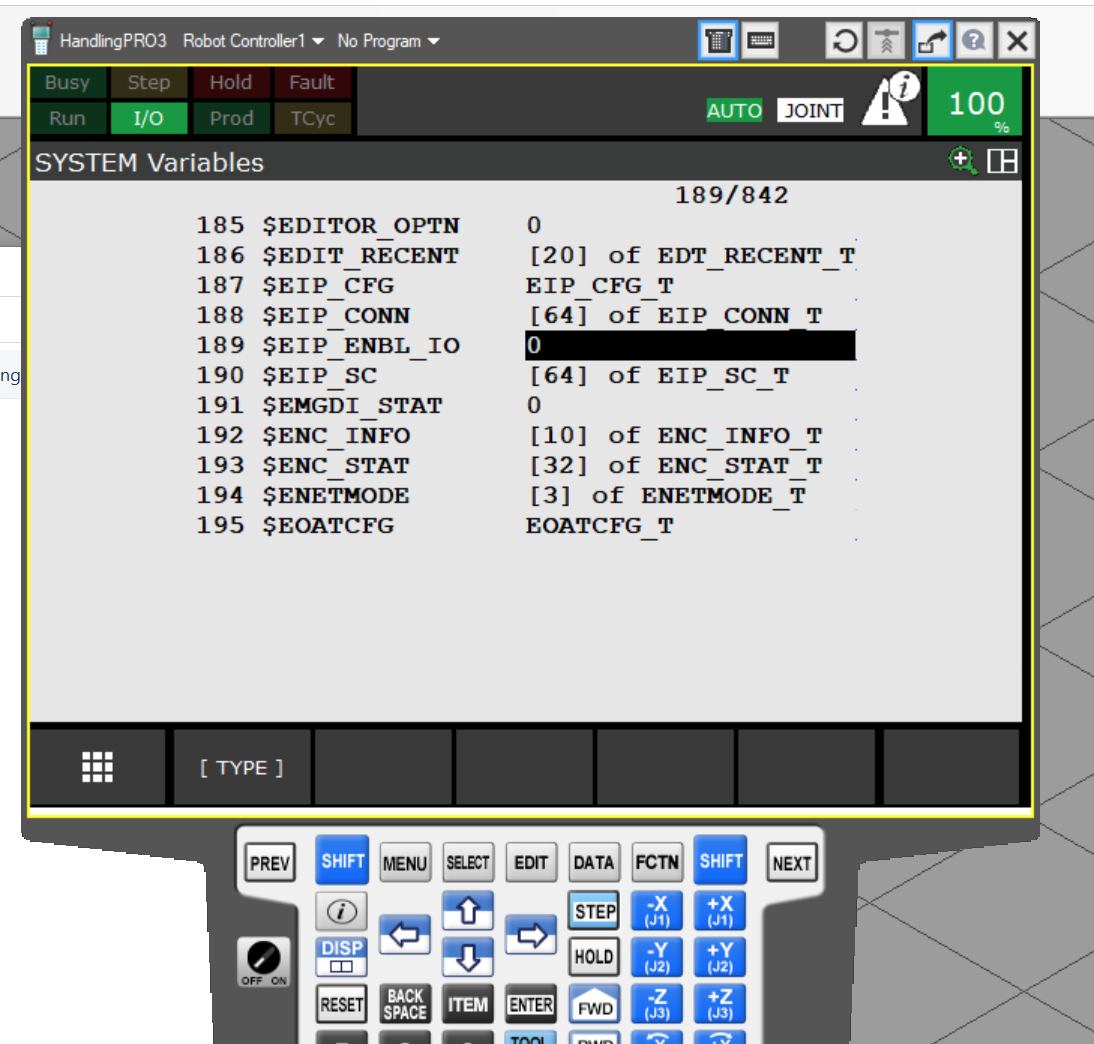
Variables189 EIP_ENBL_IO
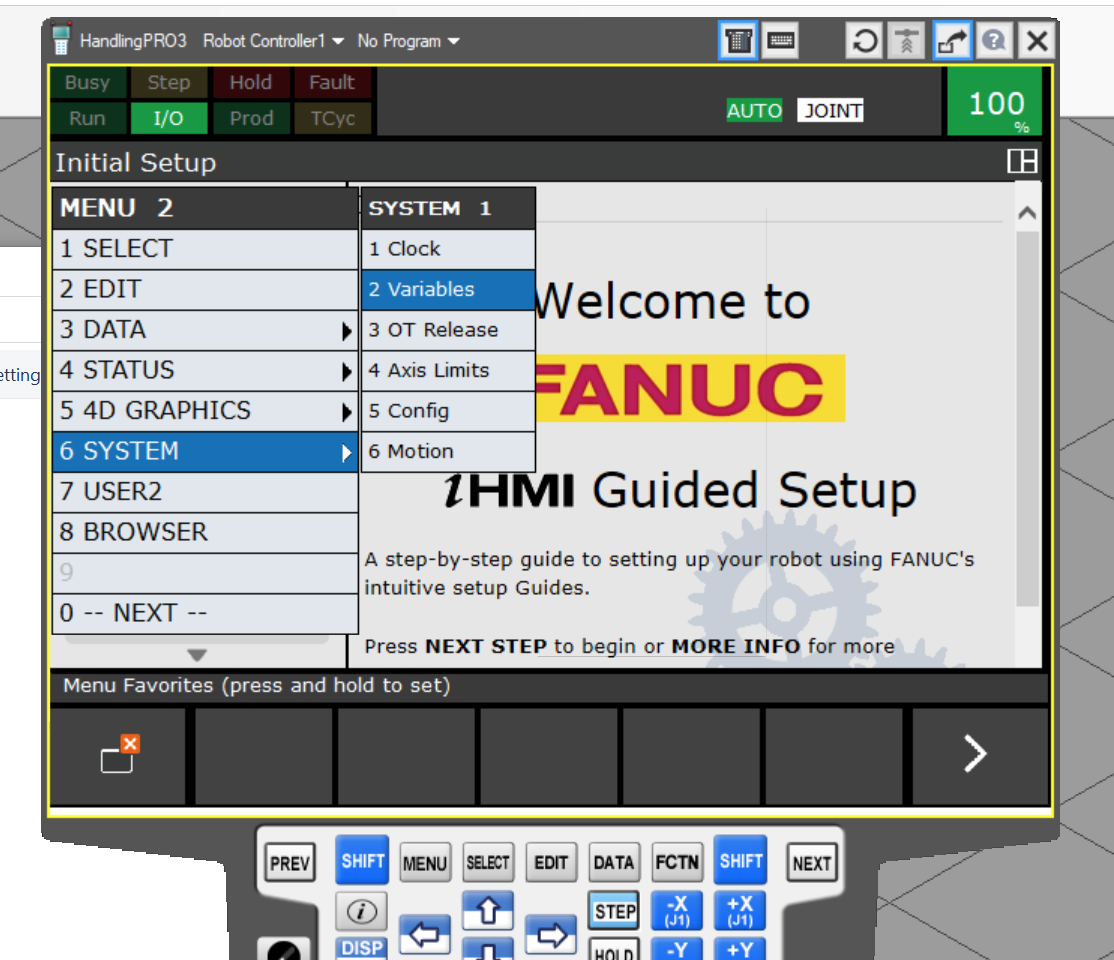
6 SYSTEM>2 Variablesを開きます。
パラメタ189番$EIP_ENBL_IOを1にしてください。
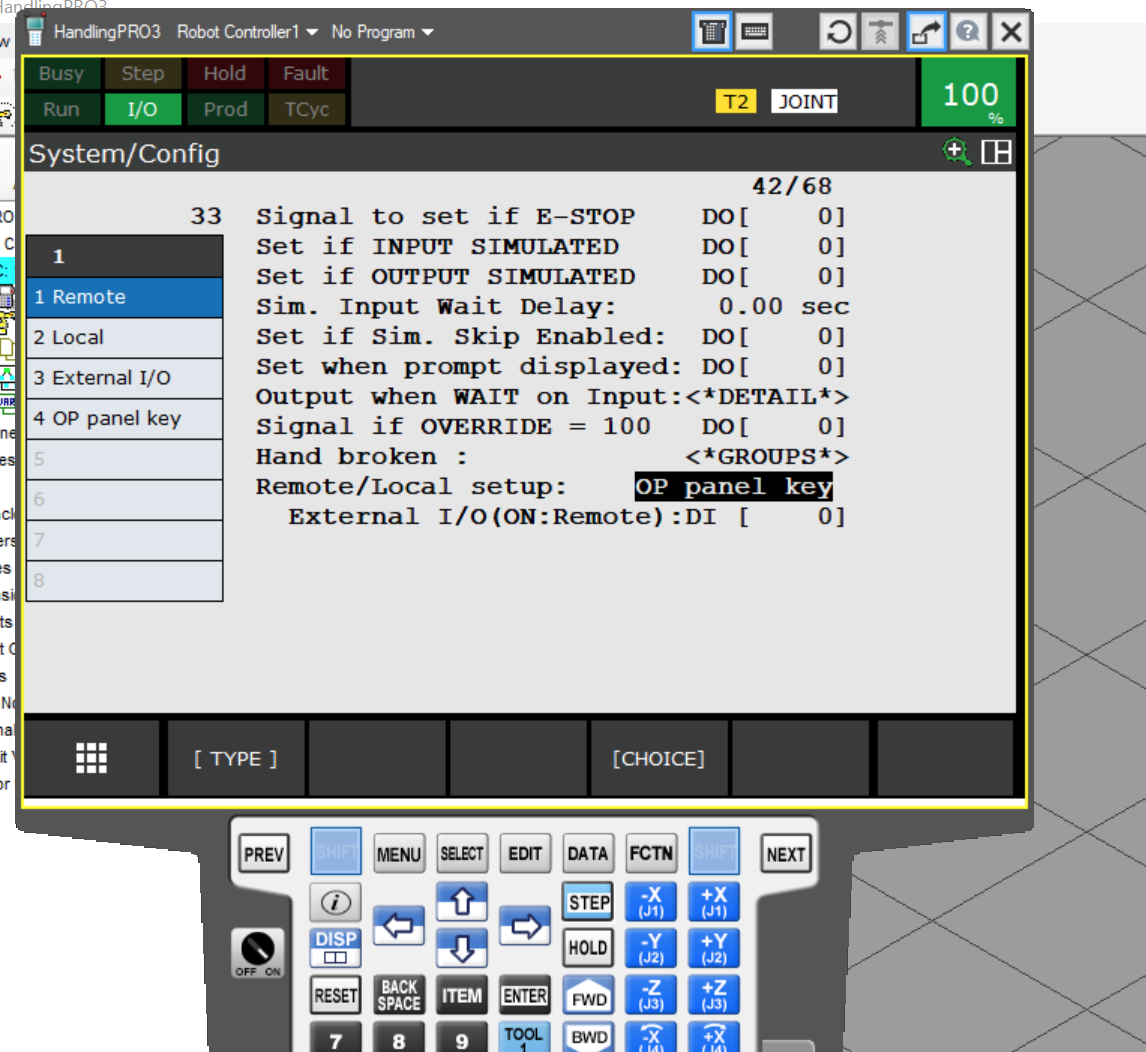
System Config
Remote/Local setup
System>Configで42番 Remote/Local setupをRemoteしてください。
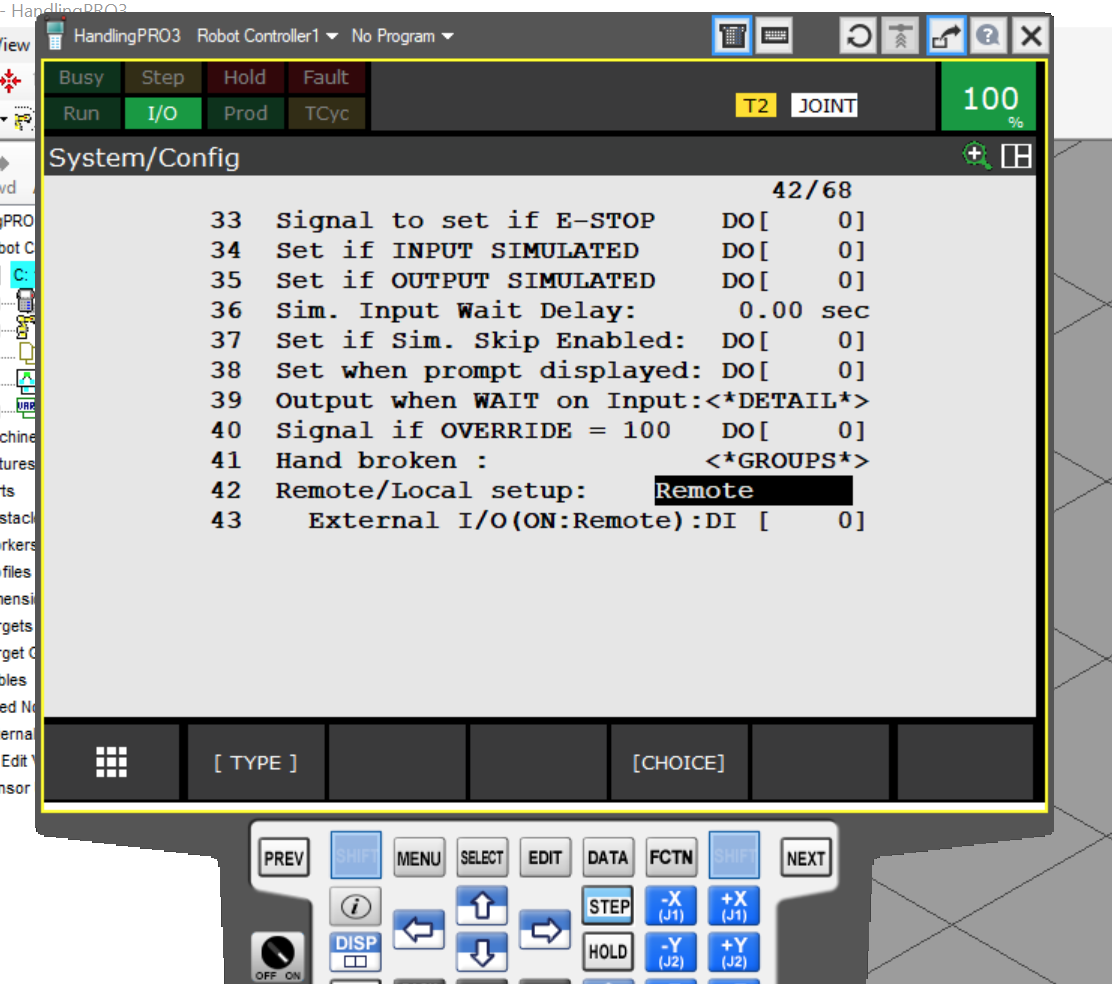
RemoteはPLCから制御するの意味で、Localは自分のControllerからの信号を監視するのことです。
Enable UI Signal
System>Configで7 Enable UI SignalsがTrueになったかを確認してください。

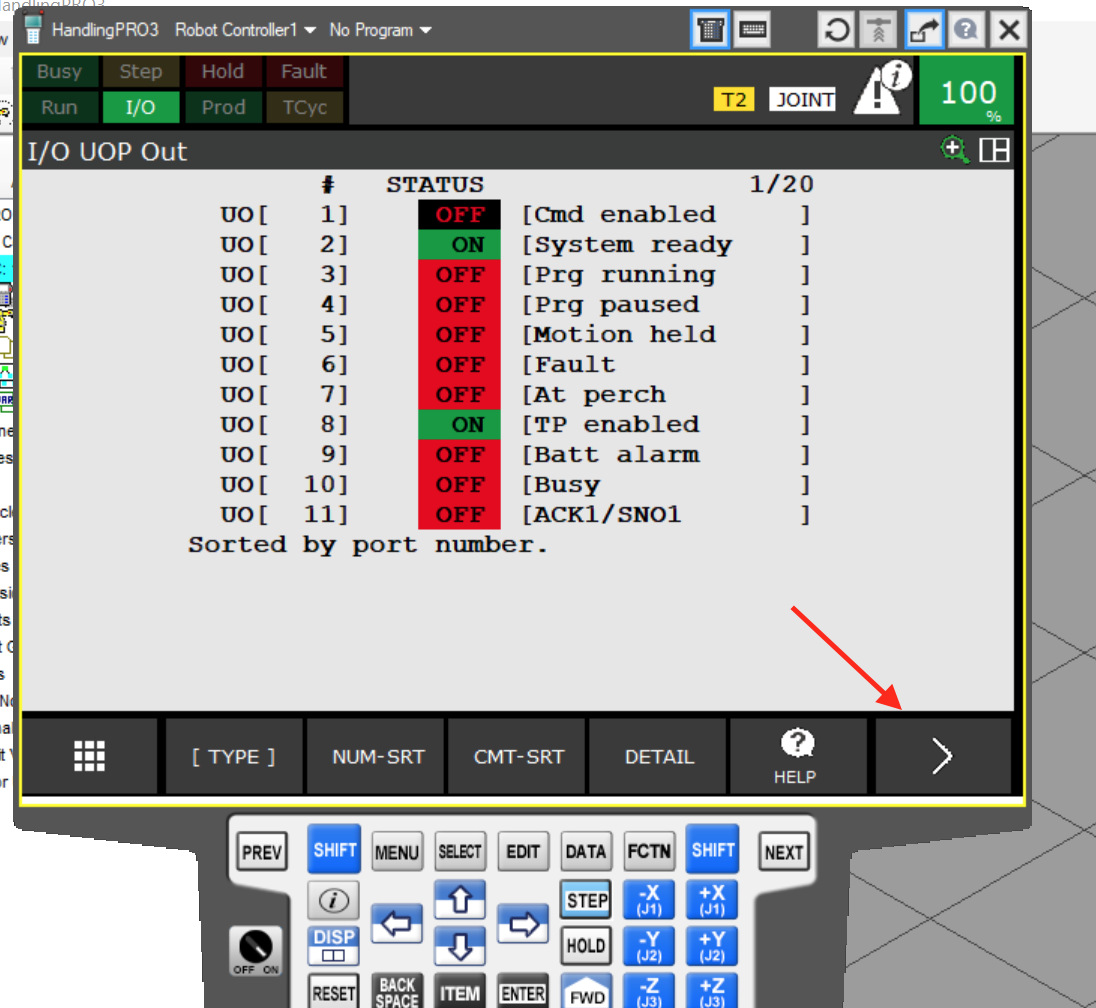
UOP設定
最後はUOP設定です。
I/O>UOPのメニューをら開きます。

IN/OUTでいま表示してるをIN>OUTやOUT>INに切り替えることが可能です。

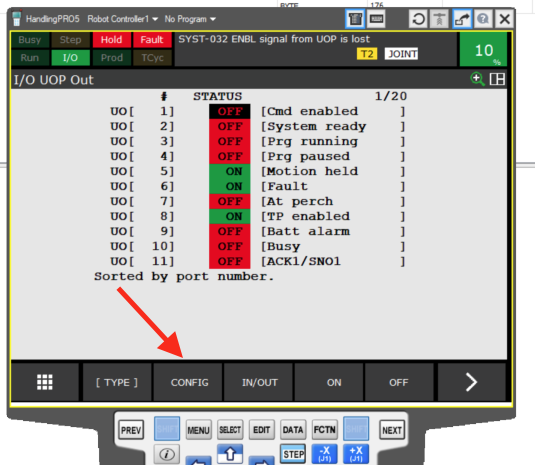
INPUT・OUTPUTの設定も同じなので、OUTPUTの設定例にします。
CONIFGをクリックします。
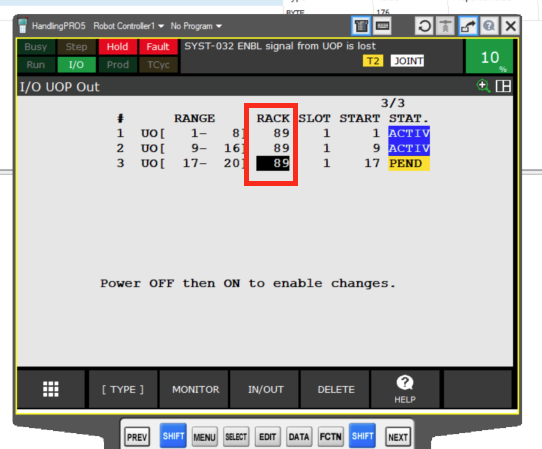
RACKのところに89をいれてください。これはEthernet/IPのMagic番号です。なぜ89なのか聞かないでください。
Codesys側
まず下記の記事からEIP Scannerを追加してください。
ROBOGUIBEからExportしたEDS FileをCodesysにインストールします。
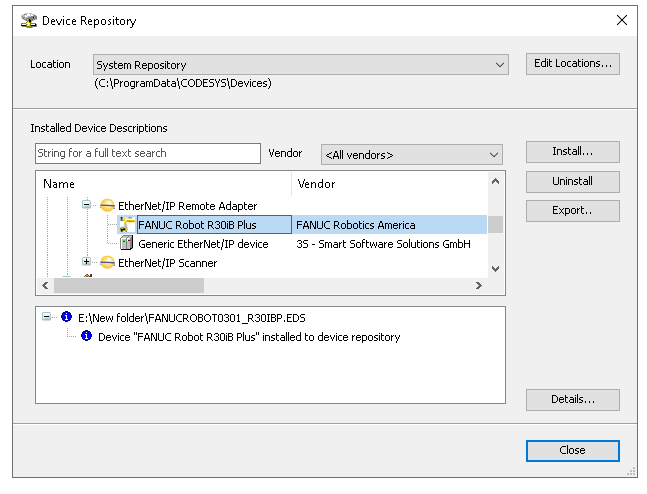
次はScan for Devices..でデバイスを検索。

お、ロボットが見つかりました。
Copy to Projectでデバイスを追加します。
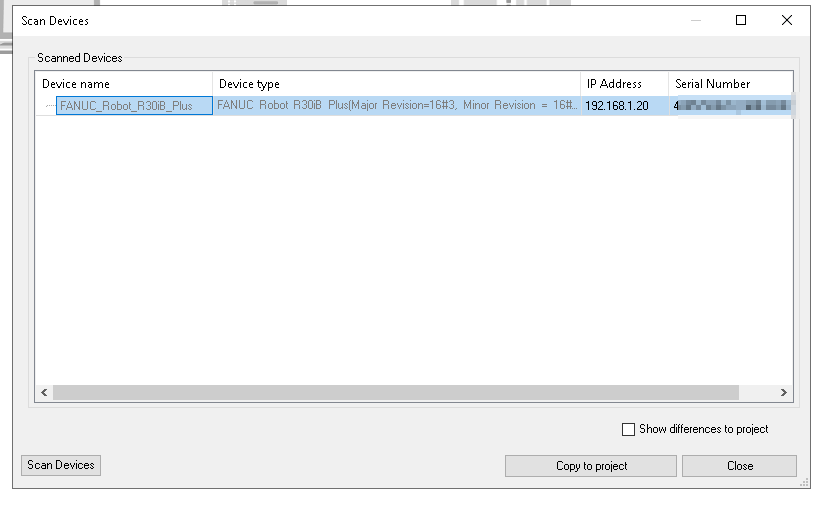
これで追加されましたね。
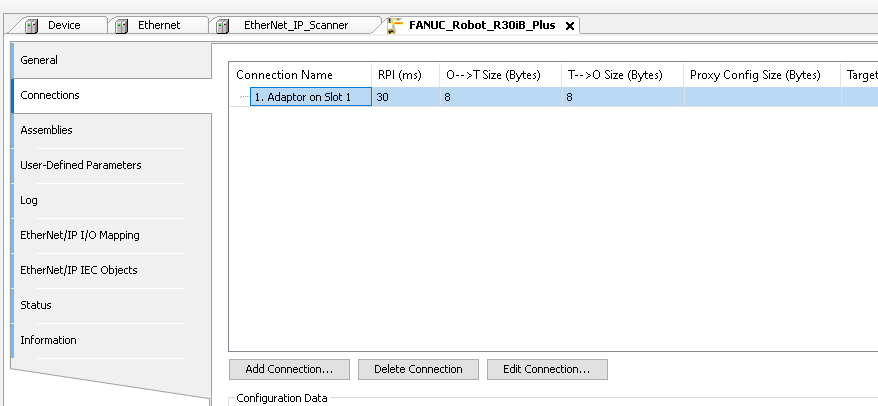
ConnectionsのところにいまSlot1をDefault使用しています。
もしTimeoutなどの発生がひどい場合
Edit Connectionします。

Timeout multiplerを調整したり、あと別のSlotを試したりしてみてくださいね。

ちなみに、繋がってるとこんな画面になります:
Codesys側にもちゃんと信号もらっています。

最後
はーい、お疲れ様です。
このシリーズではFANUCのロボットとROBOGUIDEを使用について勉強用のメモになります。あくまでも個人的書いてたものなので、実際使うときには安全を注意し、経験あるエンジニアと一緒に作業してくださいね。
もしなにか質問あれば、メール・コメント・Twitterなどでもどうぞ!
Twitterのご相談:@3threes2
メールのご相談:soup01threes*gmail.com (*を@に)