今回はDobotのReal-time feedback Portを利用しDobot CR5の現在状態を受信します。Client側はBeckhoff TwinCAT3とTF6310 TCP/IP Functionを使用します。よろしくお願いします。
Thanks!
この記事が出来上がるのはベッコフ日本法人ベッコフオートメーション株式会社さま・さまから機材を貸してくださったおかけです。誠にありがとうございます。
ベッコフ日本法人ベッコフオートメーション株式会社
IPC6920-005はベッコフ日本法人ベッコフオートメーション株式会社さまが貸してくださったものです。Beckhoff Automationは1980 年会社設立、PCベースの制御技術をベースにしたオープンオートメーションシステム導入の先頭に立つドイツ企業です。
ベッコフ日本法人ベッコフオートメーション株式会社は、2011年に横浜に本社、2017年に名古屋オフィスを設立しました。

こちらはベッコフ日本法人ベッコフオートメーション株式会社様のホームページです。
どうぞよろしくお願いします。
Address
横浜オフィス(本社)
ベッコフオートメーション株式会社
〒231-0062
神奈川県横浜市 中区桜木町1-1-8
日石横浜ビル18階
HP
https://www.beckhoff.com/ja-jp/
株式会社フレアオリジナル
この記事ができあがったのは株式会社フレアオリジナルがDOBOT貸してくださったおかけです。本当にありがとうございます。フレアオリジナルは長野県にあるエンジニアリング会社で、協働ロボットDOBOTとDH-ROBOTICSの正規代理店です。
株式会社フレアオリジナルさまは様々な分野で事業を展開しております。
- 産業用・協働ロボットシステムの設計・製造・構想、設計、制作・導入・運用保守
- ロボット特別教育
- ROBOTICS LAB(XR開発)
- VRのご提案
フレアオリジナルさまが自社の高い技術力を使って仮想空間と現実空間を繋がり、私達人間の限界を突破し、ロボティクス活動を続けていくでしょう。

Address
〒389-0601
長野県埴科郡坂城町坂城9439-5
株式会社フレアオリジナル
HP
Reference Link
Dobot Side
Real-time Feedback Port
DobotのControllerではReal Time Feedback Portがありまして、他のデバイスからDobotの状態を周期で受け取ることができます。
使用できるPortは以下です:
- 30004=8ms周期で接続先にデータを送信する(1440Bytes)
- 30005=200ms周期で接続先にデータを送信する(1440Bytes)
- 30006=Defaultが50msで接続先にデータを送信する(1440Bytes)
Check the Connections
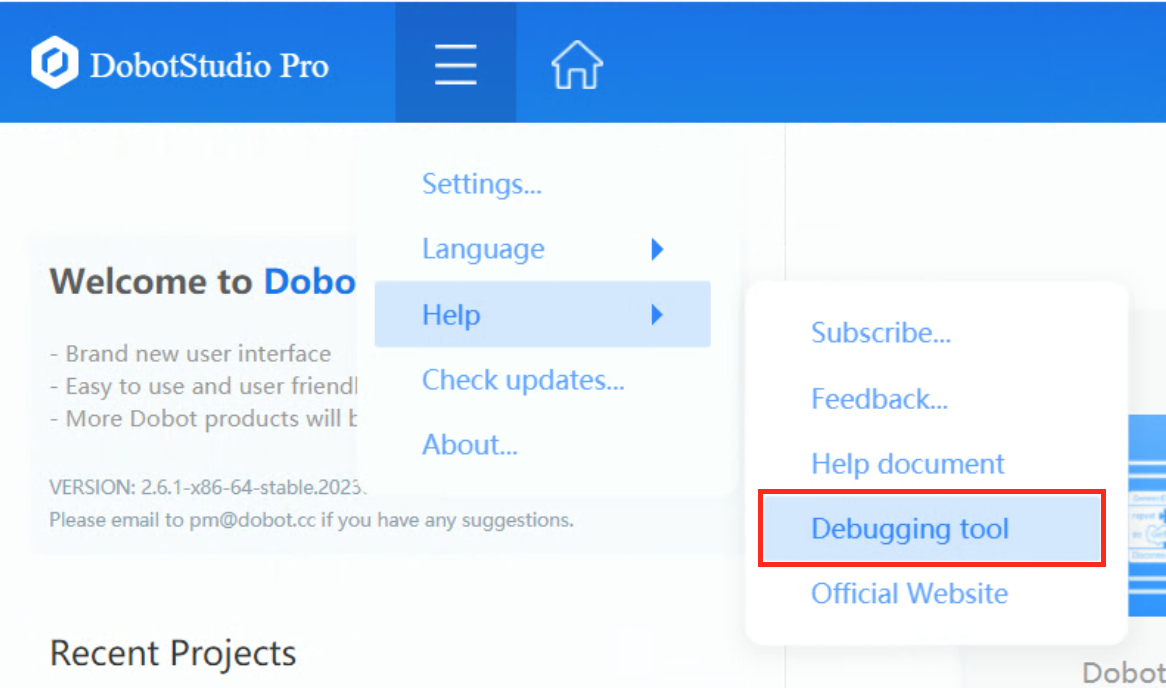
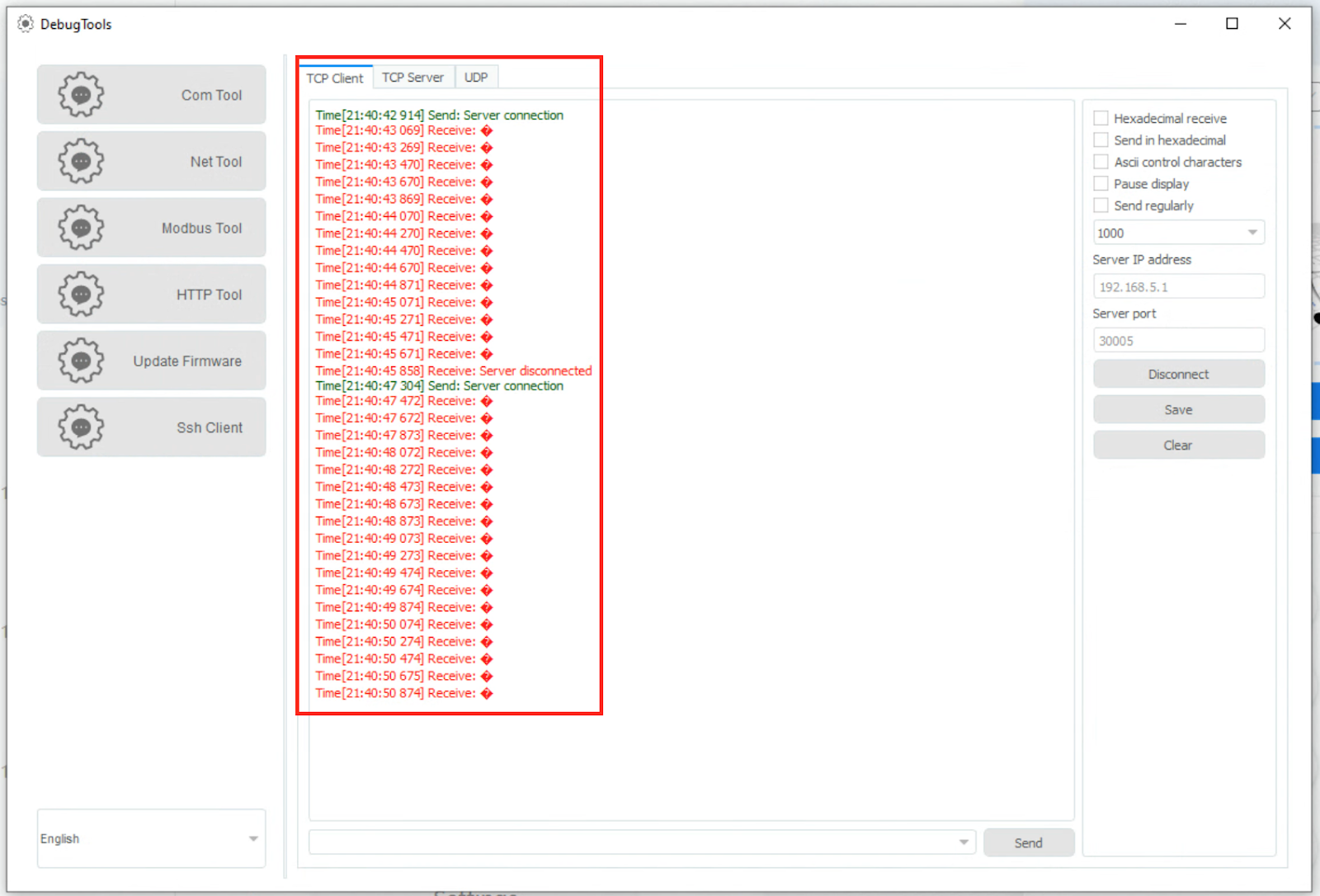
実際TwinCATをDobot ControllerのReal-Time feedback Portと接続する前に、まずDootStudio Proを立ち上げ>Help>Debugging Toolを起動します。
Net Toolというツールがあり、Dobot Controllerから直接送受信できます。
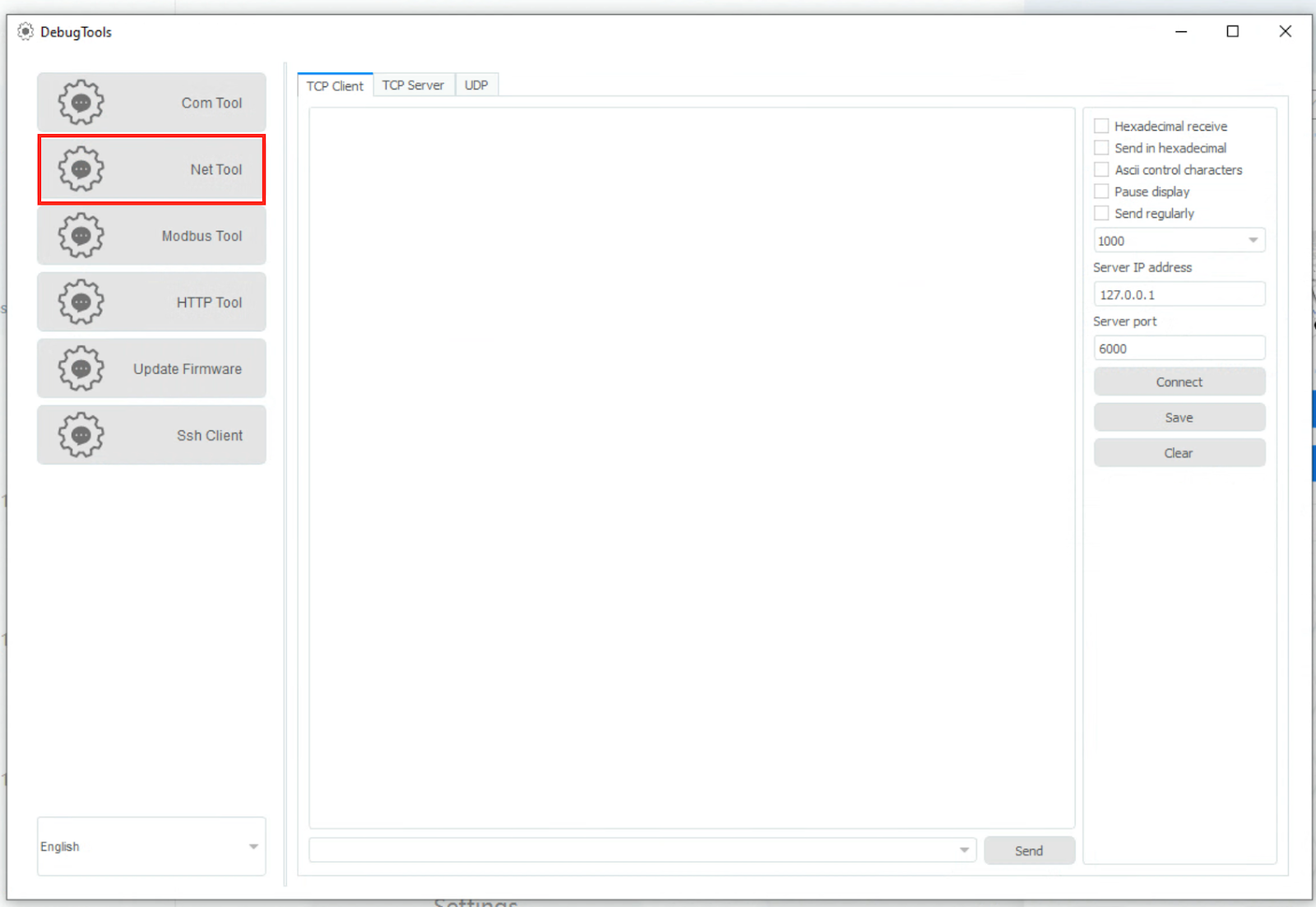
TCP Client Tabを選び、Server IP AddressとServer Portを入力します。
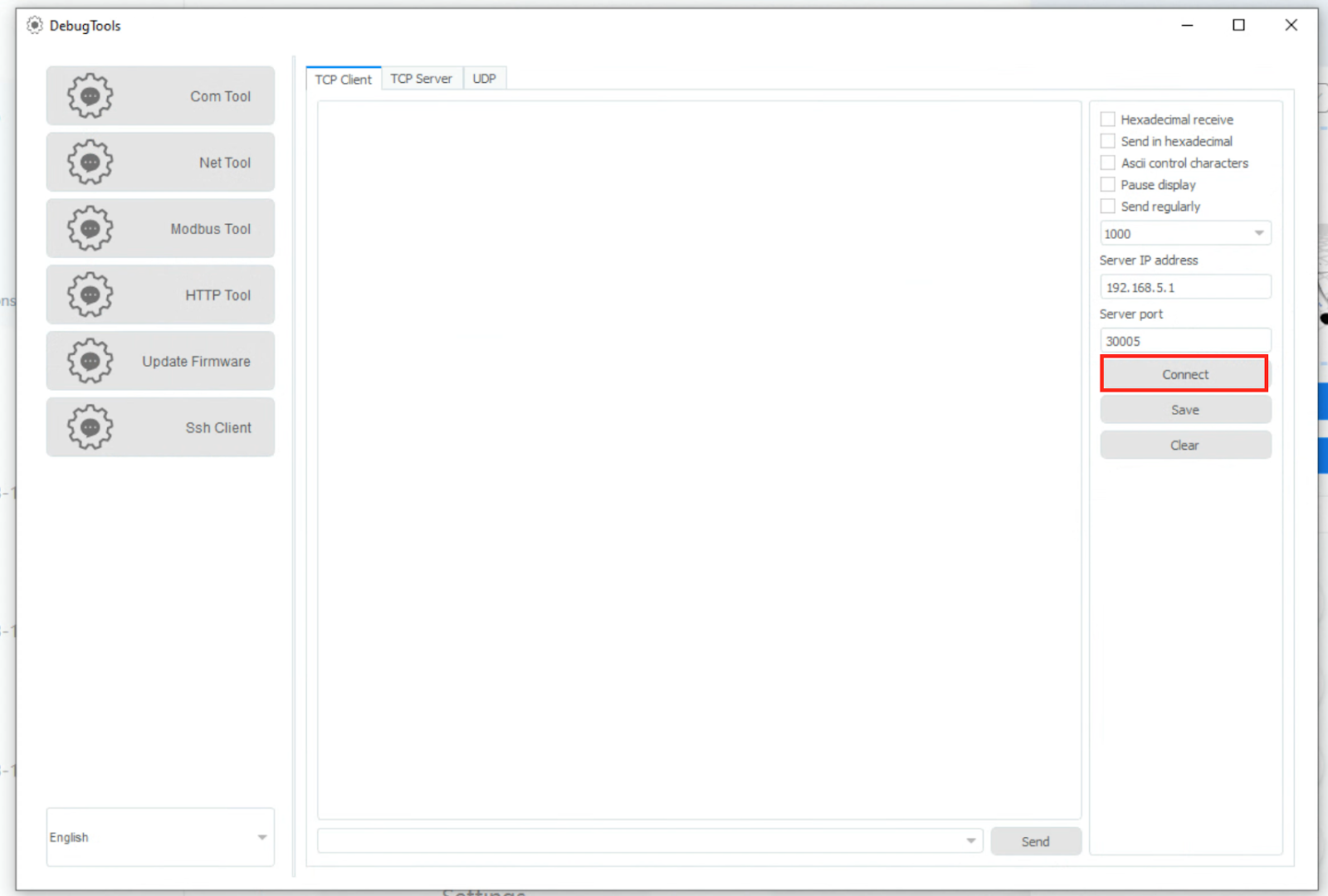
今回はLANで接続しているので、IPは192.168.5.1で、Portは30005を使用します。

ConnectをクリックしDobot Controllerと接続します。
Dobot Controllerから返答が来ましたが、データがみえませんね。
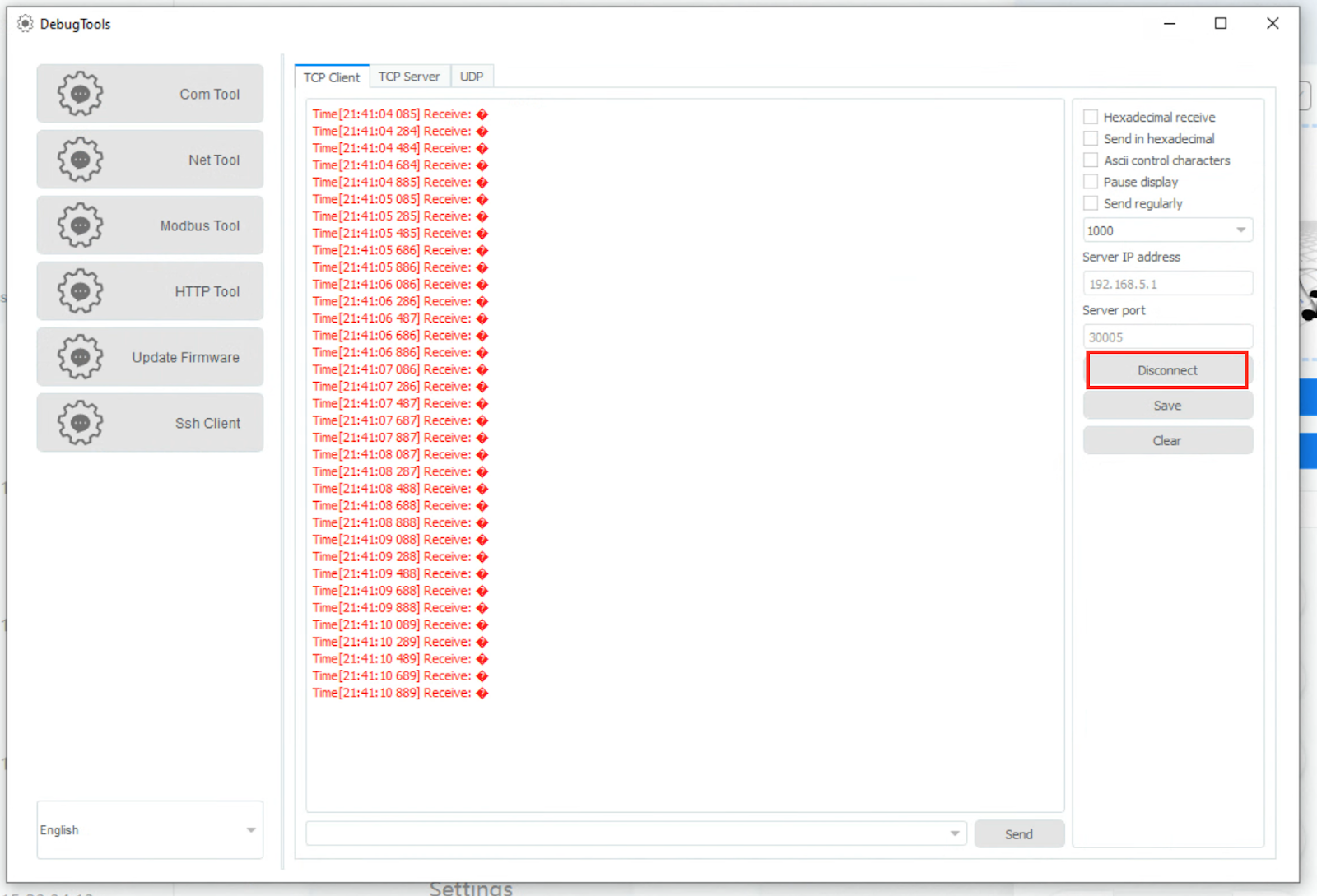
一回DisconnectボタンをクリックしDobot ControllerのConnectionと切断します。
hexadecimal ReceiveのCheckboxをいれます。
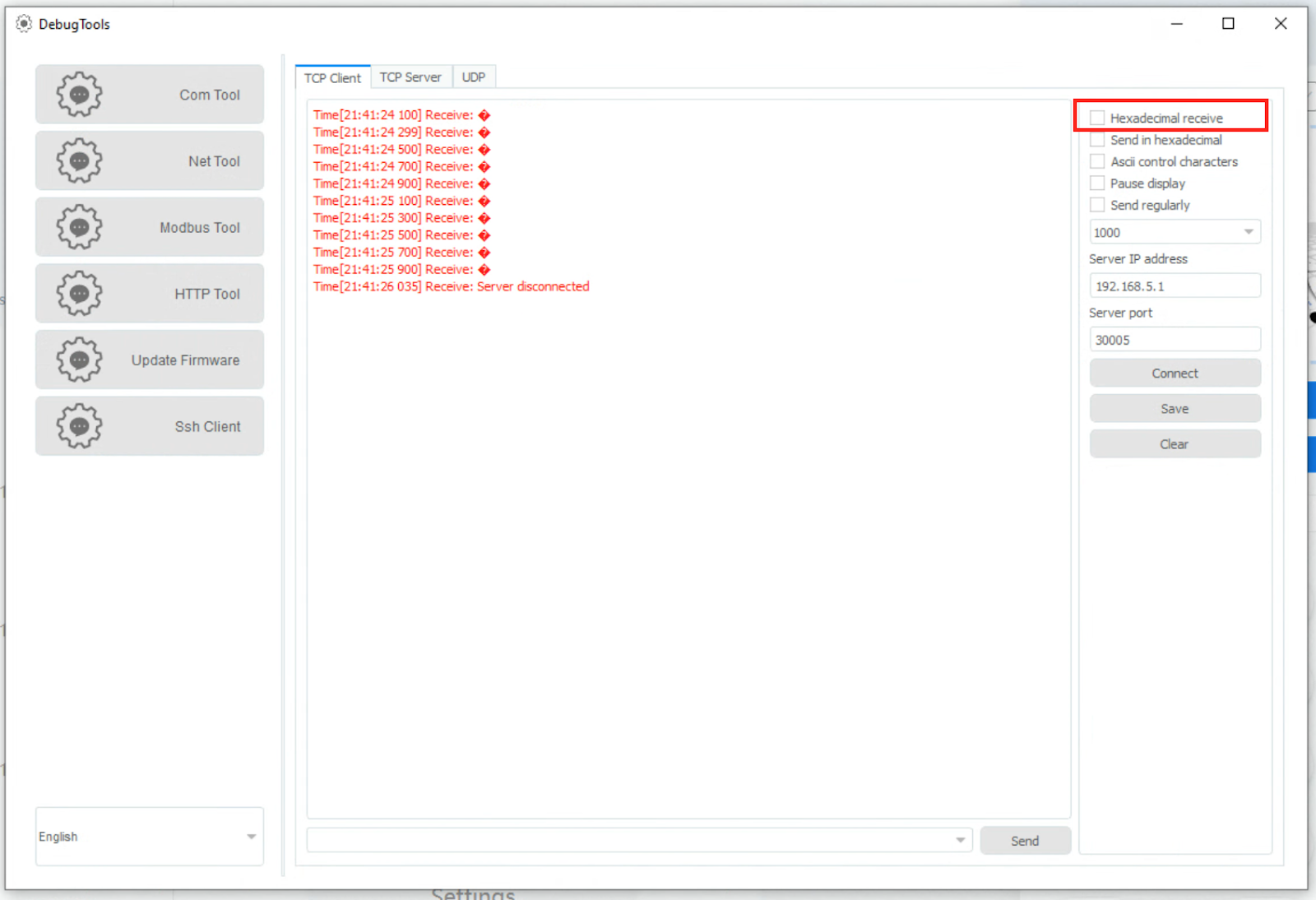
もう一回接続すると、名前データが帰ってきました。これで接続OKって確認できました。

Robot Mode
Real-time feedback Portから返したデータの中にRobotの現在の状態を示す変数があります。
| Mode | Description |
| 1 | ROBOT_MODE_INIT |
| 2 | ROBOT_MODE_BRAKE_OPEN |
| 3 | |
| 4 | ROBOT_MODE_DISABLED |
| 5 | ROBOT_MODE_ENABLE |
| 6 | ROBOT_MODE_BACKDRIVE |
| 7 | ROBOT_MODE_RUNNING |
| 8 | ROBOT_MODE_RECORDING |
| 9 | ROBOT_MODE_ERROR |
| 10 | ROBOT_MODE_PAUSE |
| 11 | ROBOT_MODE_JOG |
Brake Status
Real-time feedback Portから返したデータの中にBrakeの現在の状態を示す変数があります。
- 0x01=6軸目のBrakeがリリースされた
- 0x02=5軸目のBrakeがリリースされた
- 0x03=6軸目と5軸目のBrakeがリリースされた
のようなイメージで、6軸のBrake状態をBit単位で表現します。なので、
- Bit0=Joint6
- Bit1=Joint5
- Bit2=Joint4
- Bit3=Joint3
- Bit4=Joint2
- Bit5=Joint1
Joint Mode
Real-time feedback Portから返したデータの中にJoint Modeの現在の状態を示す変数があります。
- 8=Position Mode
- 10=Torque Mode
Robot Type
Real-time feedback Portから返したデータの中に現在のロボット種類を示す変数があります。
| Mode | Description |
| 1 | MG400 |
| 2 | M1Pro |
| 3 | CR3 |
| 31 | CR3L |
| 5 | CR5 |
| 7 | CR7 |
| 10 | CR10 |
| 12 | CR12 |
| 16 | CR16 |
Beckhoff Side
Add Reference
今回使用するのはTF6310のTc2_TcpIpライブラリです。プロジェクトにそのライブラリを追加してください。
DUT
DUT_Dobot_CR_RealtimeFeedback
こちらはDobot TCP/IP通信仕様書に提供されたデータ構造に合わせて構造体を作り、合計1440Bytesです。
| TYPE DUT_Dobot_CR_RealtimeFeedback : STRUCT MessageSize :UINT; //0-1,Total message length in bytes Rev1 :ARRAY[1..3]OF UINT; //2-7 DigitalInputs :ULINT; //8-15,Current state of the digital inputs. DigitalOutputs :ULINT; //16-23 RobotMode :ULINT; //24-31 TimeStamp :ULINT; //32-39,TimeStamp in ms Rev2 :ULINT; //40-47 TestValue :ULINT; //48-55 Rev3 :LREAL; //56-63 SpeedSacling :LREAL; //64-71,Speed scaling of the trajectory CR\MG 0071 limiter LinearMomentumNorm :LREAL; //72-79,Norm of Cartesian linear momentum(specific hardware version) VMain :LREAL; //80-87,Masterboard: Main voltage VRobot :LREAL; //88-95,Masterboard: Robot voltage (48V) IRobot :LREAL; //96-103,Masterboard: Robot current Rev4 :ARRAY[1..2]OF LREAL; //104-119 ToolAcceleroMeter :ARRAY[1..3]OF LREAL; //120-143,Tool x,y and z accelerometer values(specific hardware version) ElbowPosition :ARRAY[1..3]OF LREAL; //144-167,Elbow position(specific CR 0167 hardware version) ElbowVelocity :ARRAY[1..3]OF LREAL; //167-191,Elbow velocity(specific hardware version) QTarget :ARRAY[1..6]OF LREAL; //192-239,Target joint positions QDTarget :ARRAY[1..6]OF LREAL; //240-287,Target joint velocities QDDTarget :ARRAY[1..6]OF LREAL; //288-335,Target joint accelerations ITarget :ARRAY[1..6]OF LREAL; //336-383,Target joint currents MTarget :ARRAY[1..6]OF LREAL; //384-431,Target joint moments (torques) QActual :ARRAY[1..6]OF LREAL; //432-479,Actual joint positions QDActual :ARRAY[1..6]OF LREAL; //480-527,Actual joint velocities IActual :ARRAY[1..6]OF LREAL; //528-575,Actual joint currents ActualTCPForce :ARRAY[1..6]OF LREAL; //576-623,CP sensor value (calculated by CR\MG 0623 six-axis force) ToolVectorActual :ARRAY[1..6]OF LREAL; //624-671,Actual Cartesian coordinates of the tool TCPSpeedActual :ARRAY[1..6]OF LREAL; //672-719,Actual speed of the tool given in CR\MG 0719 Cartesian coordinates TCPForce :ARRAY[1..6]OF LREAL; //720-767,TCP force value (calculated by CR\MG joint current) ToolVectorTarget :ARRAY[1..6]OF LREAL; //768-815,Target Cartesian coordinates of the tool: (x,y,z,rx,ry,rz), TCPSpeedTarget :ARRAY[1..6]OF LREAL; //816-863,Target speed of the tool given in CR\MG Cartesian coordinates MotorTemperatures :ARRAY[1..6]OF LREAL; //864-911,Temperature of each joint in CR 0911 degrees celsius JointModes :ARRAY[1..6]OF LREAL; //912-959,Joint control modes VActual :ARRAY[1..6]OF LREAL; //960-1007,Actual joint voltages HandType :ARRAY[1..4]OF BYTE; //1008-1011,Hand Type User :BYTE; //1012, Tool :BYTE; //1013, RunQueuedCmd :BYTE; //1014, PauseCmdFlag :BYTE; //1015, VelocityRatio :BYTE; //1016, AccelerationRatio :BYTE; //1017, JerkRatio :BYTE; //1018, XYZVelocityRatio :BYTE; //1019, RVeolcityRatio :BYTE; //1020, XYZAccelerationRatio :BYTE; //1021, RAccelerationRatio :BYTE; //1022, XYZJerkRatio :BYTE; //1023, RJerkRatio :BYTE; //1024, BrakeStatus :BYTE; //1025, EnableStatus :BYTE; //1026, DragStatus :BYTE; //1027, RunningStatus :BYTE; //1028, ErrorStatus :BYTE; //1029, JogStatusCR :BYTE; //1030, CRRobotType :BYTE; //1031, DragButtonSignal :BYTE; //1032, EnableButtonSignal :BYTE; //1033, RecordButtonSignal :BYTE; //1034, ReappearButtonSignal :BYTE; //1035, JawButtonSignal :BYTE; //1036, SixForceOnline :BYTE; //1037, Rev5 :ARRAY[1..82]OF BYTE; //1038-1119, MActual :ARRAY[1..6]OF LREAL; //1120-1167,Actual torque Load :LREAL; //1168-1175,Payload weight CenterX :LREAL; //1176-1183,Eccentric distance in X direction CenterY :LREAL; //1184-1191,Eccentric distance in Y direction CenterZ :LREAL; //1192-1199,Eccentric distance in Z direction UserCoordinate :ARRAY[1..6]OF LREAL; //1120-1247,User coordinate ToolCoordinate :ARRAY[1..6]OF LREAL; //1248-1295,Tool coordinate TraceIndex :LREAL; //1296-1303,Track playback running index SixForceValue :ARRAY[1..6]OF LREAL; //1304-1351,Six – axis force original value TargetQuaternion :ARRAY[1..4]OF LREAL; //1352-1383,Target quaternion [qw,qx,qy,qz] ActualQuaternion :ARRAY[1..4]OF LREAL; //1384-1415,Actual quaternion[qw,qx,qy,qz] CR Rev6 :ARRAY[1..24]OF BYTE; //1416-1440 END_STRUCT END_TYPE |
uDUT_Dobot_CR_RealtimeFeedback
次はUNIONを使用し、1440長さのByte配列と先ほど定義したDUT_Dobot_CR_RealtimeFeedbackを同じメモリOFFESTするように定義します。
| TYPE uDUT_Dobot_CR_RealtimeFeedback : UNION _raw :ARRAY[0..1439]OF BYTE; data :DUT_Dobot_CR_RealtimeFeedback; END_UNION END_TYPE |
e_Dobot_CR_RealtimeFeedback_RobotMode
こちらはDobotのオペレーションモードです。
| {attribute ‘qualified_only’} {attribute ‘strict’} TYPE e_Dobot_CR_RealtimeFeedback_RobotMode : ( NOP := 0 ,Init:=1 ,BrakeOpen:=2 ,Disable:=4 ,Enable:=5 ,Drag:=6 ,Run:=7 ,DragRecord:=8 ,Alarm:=9 ,Pause:=10 ,Jogging:=11 ); END_TYPE |
e_Dobot_CR_RealtimeFeedback_RobotType
次は接続しているロボットの型式です。
| {attribute ‘qualified_only’} {attribute ‘strict’} TYPE e_Dobot_CR_RealtimeFeedback_RobotType : ( Nop := 0 ,CR3:=3 ,CR3L:=31 ,CR5:=5 ,CR7:=7 ,CR10:=10 ,CR12:=12 ,CR16:=16 ,MG400:=1 ,M1Pro:=2 ); END_TYPE |
Functions
FC_Dobot_Get_RobotType
こちらのFunctionはリアルタイムデータからもらったロボットタイプ変数に該当するロボット型式を戻しします。
| FUNCTION FC_Dobot_Get_RobotType : STRING VAR_INPUT RobotType :BYTE; END_VAR VAR END_VAR FC_Dobot_Get_RobotType:=”; CASE BYTE_TO_INT(RobotType) OF e_Dobot_CR_RealtimeFeedback_RobotType.CR10: FC_Dobot_Get_RobotType:=’CR10′; e_Dobot_CR_RealtimeFeedback_RobotType.CR12: FC_Dobot_Get_RobotType:=’CR12′; e_Dobot_CR_RealtimeFeedback_RobotType.CR16: FC_Dobot_Get_RobotType:=’CR16′; e_Dobot_CR_RealtimeFeedback_RobotType.CR3: FC_Dobot_Get_RobotType:=’CR3′; e_Dobot_CR_RealtimeFeedback_RobotType.CR3L: FC_Dobot_Get_RobotType:=’CR3L’; e_Dobot_CR_RealtimeFeedback_RobotType.CR5: FC_Dobot_Get_RobotType:=’CR5′; e_Dobot_CR_RealtimeFeedback_RobotType.CR7: FC_Dobot_Get_RobotType:=’CR7′; e_Dobot_CR_RealtimeFeedback_RobotType.M1Pro: FC_Dobot_Get_RobotType:=’M1Pro’; e_Dobot_CR_RealtimeFeedback_RobotType.MG400: FC_Dobot_Get_RobotType:=’MG400′; END_CASE |
MAIN
DUTとテスト用のFunctionを用意したあとメインプログラムを作成します。
VAR
Socket通信用のFunction Block・受信データBuffer・受信CounterとエラーCounterなど、プログラムで使用される変数を定義します。
| PROGRAM MAIN VAR SocketConnect :FB_SocketConnect; SocketClose :FB_SocketClose; SocketReceive :FB_SocketReceive; hSocket :T_HSOCKET; bConnect :BOOL; bClose :BOOL; RefleshingTimer :TON; tRefleshTime :TIME:=T#200MS; tTimeoutTimer,TRetryTimer:TON; ReceiveByte :ARRAY[0..1439]OF BYTE; receCounter:UINT:=0; ErrorCounter:UINT:=0; DobotCR5:uDUT_Dobot_CR_RealtimeFeedback; iStep:UINT:=0; RobotType :STRING; Disabled :BOOL; END_VAR |
Program
Robot Controller に接続する>受信待ち>もし受信データサイズが1440Bytesなら受信Counterを加算する>もし時間内に1440Bytesのデータ受信できないなら>接続を切断>待ち>再接続のような流れです。
| CASE iStep OF 0: SocketConnect( sRemoteHost:=’192.168.5.1′ ,nRemotePort:=30005 ,bExecute:=bConnect ,hSocket=>hSocket ); IF bConnect AND (NOT SocketConnect.bBusy OR SocketConnect.bError)THEN bConnect:=FALSE; SocketConnect(bExecute:=FALSE); iStep:=10; END_IF 10: RefleshingTimer( IN:=NOT RefleshingTimer.Q ,PT:=tRefleshTime ); SocketReceive( hSocket:=hSocket ,cbLen:=1440 ,pDest:=ADR(ReceiveByte) ,bExecute:=NOT RefleshingTimer.Q AND NOT SocketReceive.bBusy ); IF SocketReceive.nRecBytes=1440 THEN DobotCR5._raw:=ReceiveByte; receCounter:=receCounter+1; RobotType:= FC_Dobot_Get_RobotType( RobotType:=DobotCR5.data.CRRobotType); Disabled:=DobotCR5.data.RobotMode = e_Dobot_CR_RealtimeFeedback_RobotMode.Disable; END_IF tTimeoutTimer(IN:=SocketReceive.nRecBytes<>1440,PT:=T#400MS); IF tTimeoutTimer.Q THEN ErrorCounter:=ErrorCounter+1; SocketReceive(bExecute:=FALSE); RefleshingTimer(in:=FALSE); tTimeoutTimer(IN:=FALSE); iStep:=20; END_IF 20: TRetryTimer(IN:=TRUE,PT:=T#0.3S); IF TRetryTimer.Q THEN TRetryTimer(IN:=FALSE); iStep:=25; END_IF 25: SocketClose( hSocket:=hSocket ,bExecute:=bClose ); IF bClose AND NOT SocketClose.bBusy THEN bClose:=FALSE; SocketClose(bExecute:=FALSE); iStep:=0; bConnect:=TRUE; END_IF END_CASE |
Result
こちらが結果になります。receCounterは加算されてるので、つまりBeckhoffとTwinCATが通信しています。

QTargetにJ1からJ6までの現在値が受信されます。
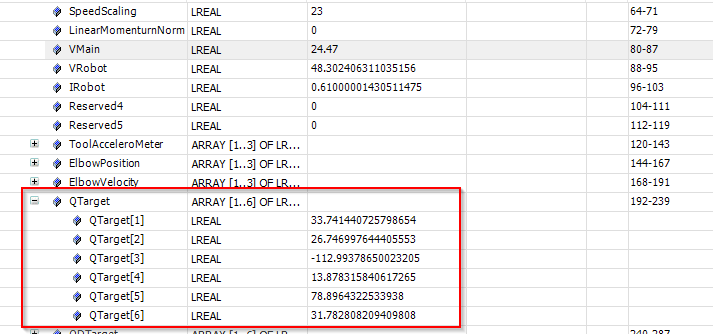
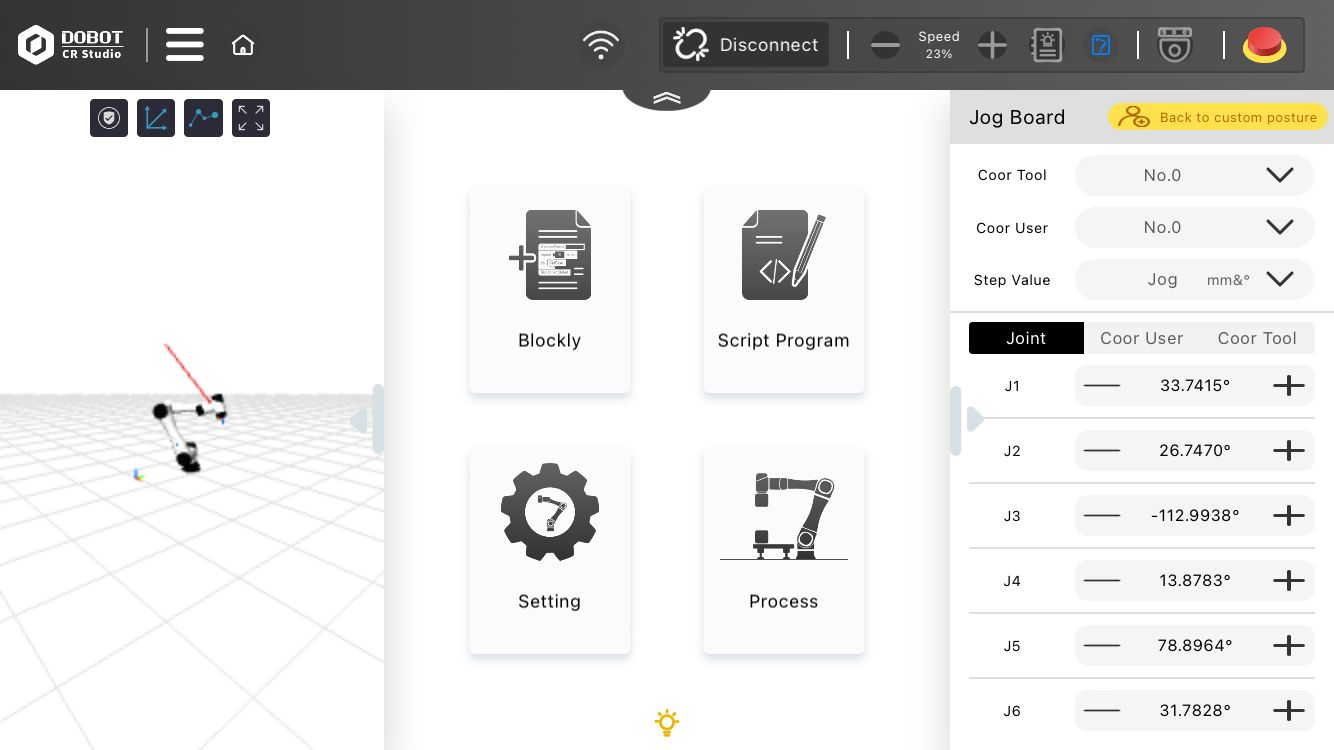
SpeedScalingは23%ですね。


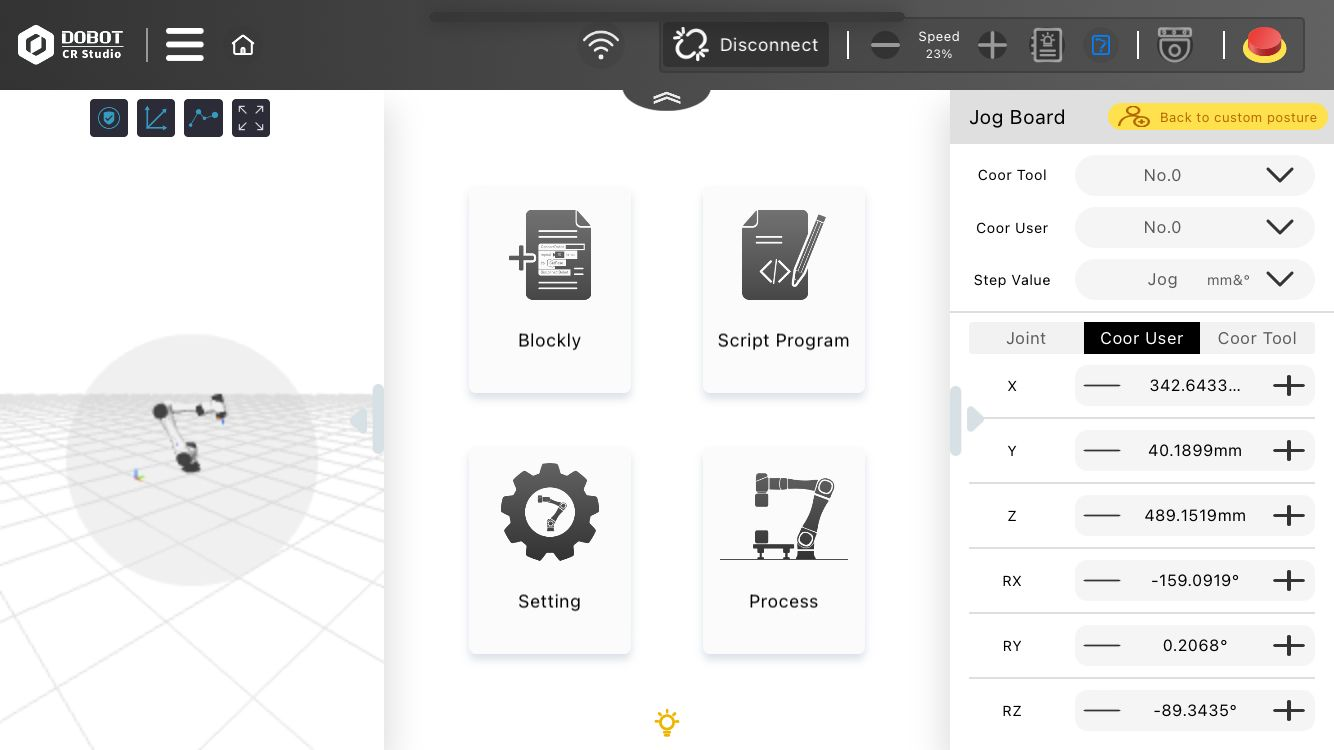
現在の座標X/Y/Z/RX/RY/RZも受け取りましたね。

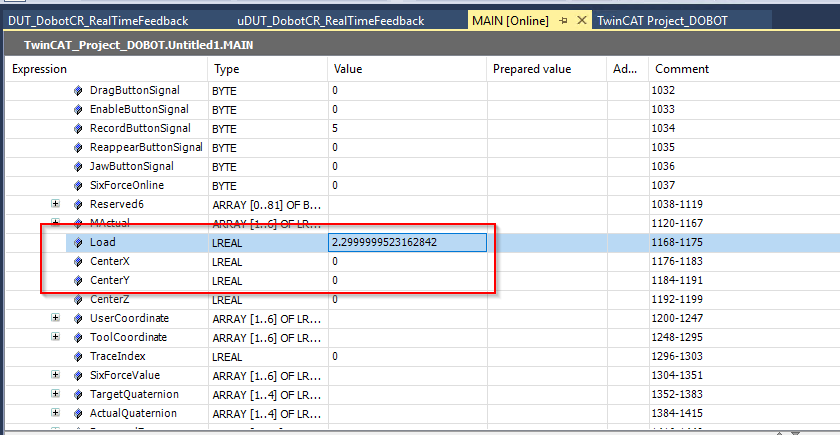
現在Dobotに設定されたPayload値もみえました。
Download
こちらのLinkからサンプルプロジェクトをDownloadしてください。
https://github.com/soup01Threes/TwinCAT3/blob/main/TwinCAT%20Project_DOBOT_RealTime_Port.tnzip