今回はDobot CR5の関節座標・直角座標・User Frameについて説明します。よろしくおねがいします。
Thanks!
株式会社フレアオリジナル
この記事ができあがったのは株式会社フレアオリジナルがDOBOT貸してくださったおかけです。本当にありがとうございます。フレアオリジナルは長野県にあるエンジニアリング会社で、協働ロボットDOBOTとDH-ROBOTICSの正規代理店です。
株式会社フレアオリジナルさまは様々な分野で事業を展開しております。
- 産業用・協働ロボットシステムの設計・製造・構想、設計、制作・導入・運用保守
- ロボット特別教育
- ROBOTICS LAB(XR開発)
- VRのご提案
フレアオリジナルさまが自社の高い技術力を使って仮想空間と現実空間を繋がり、私達人間の限界を突破し、ロボティクス活動を続けていくでしょう。

Address
〒389-0601
長野県埴科郡坂城町坂城9439-5
株式会社フレアオリジナル
HP
https://www.flareoriginal.com/
Reference Link
関節座標?
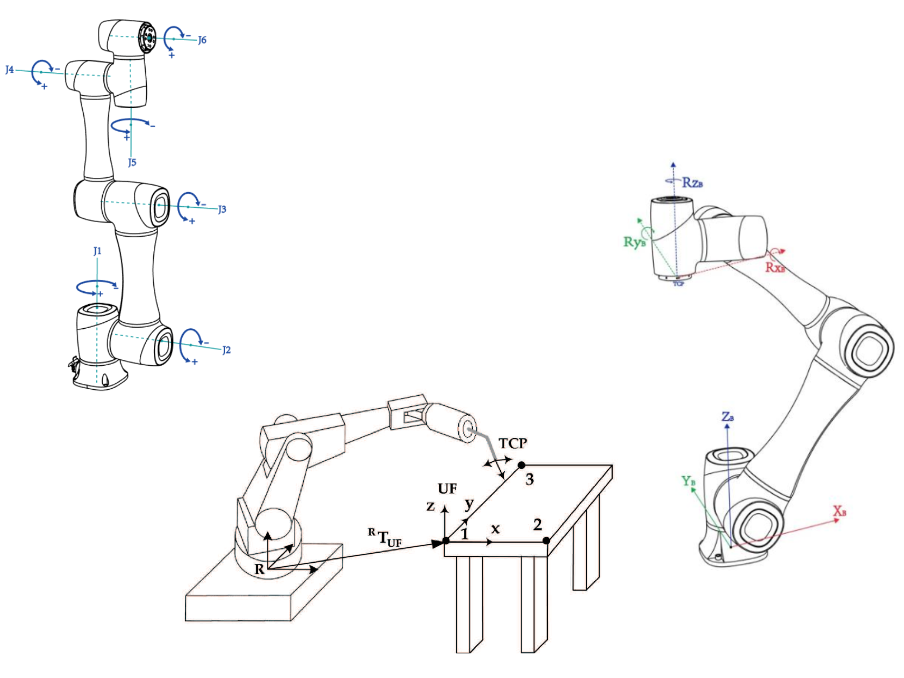
産業ロボットの関節座標系は、各関節の角度によって定義されます。関節座標系は、各関節が回転することによってロボットの位置と姿勢を変化させる方法を表現します。
産業ロボットは、多くの場合、6軸の関節を持ちます。各関節は、回転軸を中心にして、一定の角度の範囲内で回転することができます。これにより、ロボットは6つの自由度を持ち、広い範囲で物体をつかんだり、複雑な作業を行ったりすることができます。
関節座標系では、各関節の角度を制御することで、ロボットの位置と姿勢を変更します。各関節の角度は、エンコーダーやモーター制御器を使用して測定され、制御されます。ロボットが実際に行う作業は、各関節の角度を制御することで実現されます。

直角座標?
産業ロボットの直角座標系は、x、y、z軸によって定義されます。これにより、ロボットの位置と姿勢を3つの数値で表現することができます。x軸はロボットの先端が左右に移動する軸、y軸は前後に移動する軸、z軸は上下に移動する軸です。
直角座標系を使用すると、ロボットの位置と姿勢をより直感的に表現することができます。例えば、ロボットが工場内を移動している場合、直角座標系を使用すると、移動する方向をx軸とy軸で表現することができます。また、ロボットが物体を持ち上げる場合、z軸を使用して高さを表現することができます。
直角座標系を使用することにより、ロボットがより直感的に制御できるようになります。ただし、直角座標系は、ロボットが複雑な運動を実行する場合には、計算が複雑になり、制御が困難になることがあります。この場合、関節座標系を使用することが適切な場合があります。

直角座標と関節座標の違い?
直角座標と関節座標は、ロボット工学において使用される2つの異なる方法で、位置と姿勢を表現するための座標系です。
直角座標系は、3つの直交する軸によって定義されます。この座標系では、ロボットの位置と姿勢は、x、y、z座標と回転角度によって表されます。直角座標系は、ロボットが操作する空間の中での位置と姿勢を表現するために使用されます。
一方、関節座標系は、各関節の角度によって定義されます。この座標系では、ロボットの位置と姿勢は、各関節の角度によって表されます。関節座標系は、各関節の角度を制御するために使用されます。
直角座標系は、ロボットの位置や姿勢を簡単に表現できるため、多くのアプリケーションで使用されます。関節座標系は、各関節の角度を直接制御できるため、精密な動作や柔軟な運動の制御に使用されます。
直角座標と関節座標の使い分け?
産業ロボットの現場では、直角座標系と関節座標系の使い分けが重要になります。
一般的に、直角座標系は、ロボットが広い範囲を動き回る場合に適しています。例えば、ロボットが複数の作業ステーションを移動する場合や、大きな物体を移動する場合には、直角座標系を使用することが多いです。また、直角座標系は、ロボットが複数の座標点を通過する場合にも便利です。
一方、関節座標系は、ロボットが複雑な動きをする場合に適しています。例えば、ロボットが曲線を描く場合や、複雑な形状の物体を取り扱う場合には、関節座標系を使用することが多いです。関節座標系は、ロボットの各関節の角度を指定することで、より正確な位置や姿勢を指定できます。
使い分けは、どちらが効率的かによって変わる、かな。
直角座標と関節座標使い間違うと、どうなりますか?
直角座標と関節座標を使い間違うと、ロボットが想定外の動作をする可能性があります。例えば、ロボットが壁にぶつかって機械や部品を壊してしまうことや、作業者に危害を加えることが考えられます。また、目的とする位置や動作が正確でなくなり、作業品質が低下する可能性もあります。
予防策?
これを防ぐためには、作業前にロボットの座標系を確認し、正しい座標系を使用することが重要です。また、プログラムを作成する際には、座標系の設定が適切であることを確認し、正確な動作ができるようにテストを行うことが重要です。さらに、作業者には適切なロボット操作のトレーニングを行い、誤った座標系の使用を防ぐことも必要です。
User Frame?
6軸ロボットのUser Frameは、ユーザーが定義した作業座標系を表す機能です。この機能により、ロボットの基準座標系を変更することができます。具体的には、ユーザーが作業に必要な座標系を定義し、ロボットにその座標系を指示することで、ロボットがその座標系に沿って動作するようになります。

どこで使う?
例えば、製造ラインで使用されるロボットが、複数の製品を組み立てる場合を考えてみましょう。製品ごとに異なる座標系が必要な場合、それぞれの座標系をユーザーが定義し、ロボットに指示することで、ロボットが正確な位置に部品を取り付けることができます。
直角座標の違い?
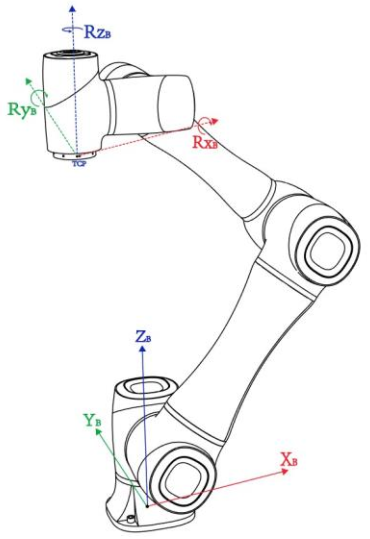
User Frameは、ロボットが操作対象となる物体の座標系を表す座標系です。一方、直角座標系は、ロボット自身の座標系を表します。
直角座標系では、ロボットの基準点を原点として、x軸、y軸、z軸に沿って位置を表現します。これに対して、User Frameでは、物体自体の座標系を基準に、x軸、y軸、z軸に沿って位置を表現します。つまり、User Frameは、ロボットが操作する物体に対して、物体の座標系に基づいて位置を表現することができます。
例えば、ロボットが自動車の塗装を行う場合、User Frameは自動車の座標系に合わせて定義されます。これにより、ロボットが自動車の各部位に正確に塗装を施すことができます。
記号
産業ロボットにおける座標の記号はメーカーによって変わる場合ありますが、一般的に以下の通りです。
- X: ロボットアームが水平方向に動く軸の座標
- Y: ロボットアームが垂直方向に動く軸の座標
- Z: ロボットアームが前後方向に動く軸の座標
- A: ロボットアームの第1回転軸の角度
- B: ロボットアームの第2回転軸の角度
- C: ロボットアームの第3回転軸の角度
これら記号は、ロボットアームがどのような動きをするかによって変わる場合があります。
Dobot CR5はX/Y/Z/RX/RY/RZの記号です。
Joint Move
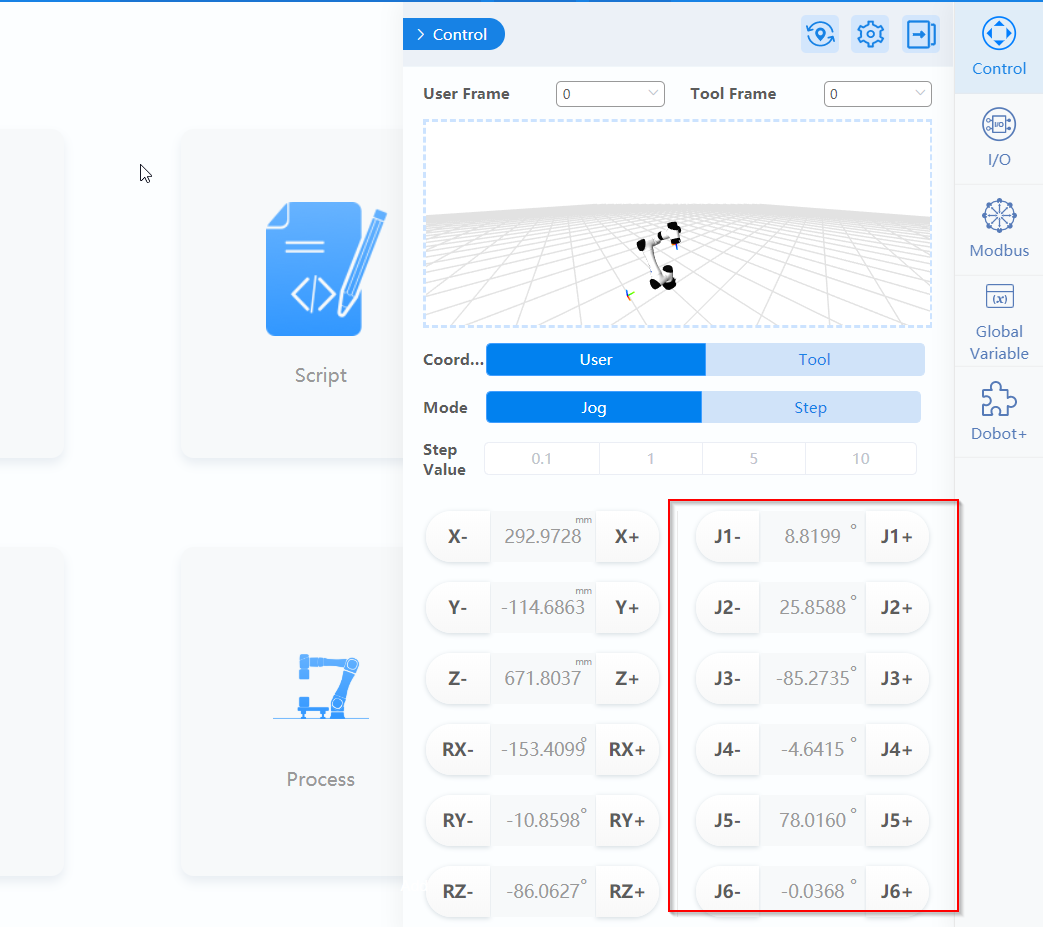
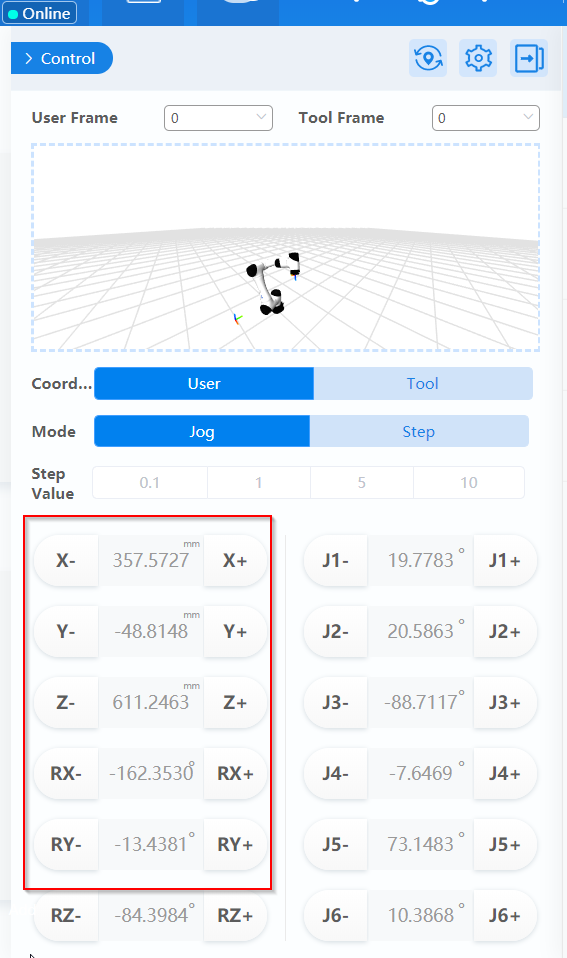
DobotStuido Proを起動し、Controlをクリックすると各Jointの現在値が表示されます。
例えばJ1-をクリックするとJ1がマイナス方向に移動し、J1+ならJ1がプラス方向に移動します。
Mode Jog
Jog Modeを使用する場合Step Valueが選択できなくなり、+/-が押してる間はロボットがずっと移動します。
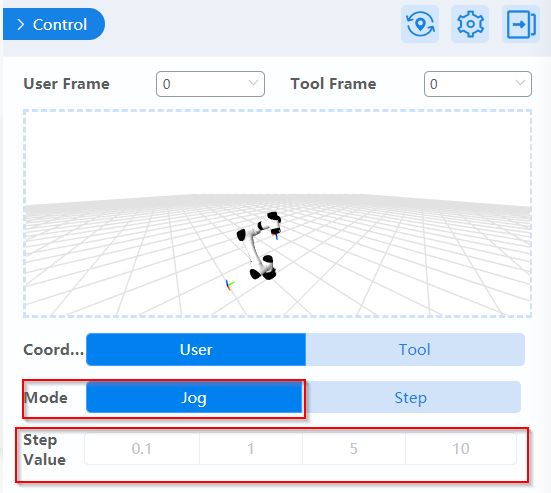
Mode Step
ModeがStepに切り替えると、Step Valueは選択できるようになります。

Operation Video
こちらの動画では各軸の関節座標から動かしています。
Move J1
Dobot.CR5 Moving J1 in DobotStudioPro
Move J2
Dobot.CR5 Moving J2 in DobotStudioPro
Move J3
Dobot.CR5 Moving J3 in DobotStudioPro
Move J4
Dobot.CR5 Moving J4 in DobotStudioPro
Move J5
Dobot.CR5 Moving J5 in DobotStudioPro
Move J6
Dobot.CR5 Moving J6 in DobotStudioPro
先ほどの動画はすべてJog Modeですが、こちらはStep Modeの動作です。
User Frame
次はX/Y/Z/RX/RY/RZのUser Frameを操作してみます。
Setting
Dobotだけではなく、すべてのロボットメーカーも複数の座標を設定できます。
DobotStudioProからSettingsを開きます。

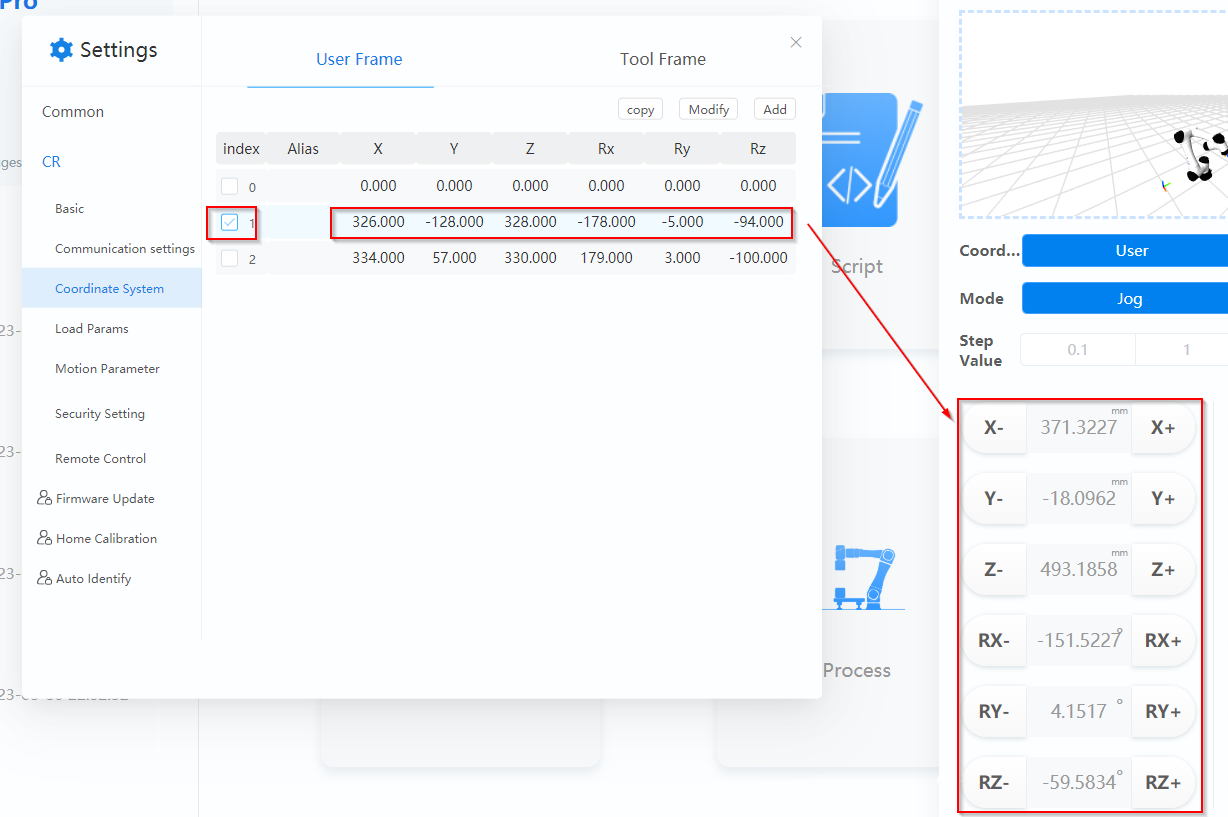
Coordinate System>User Frameを開くとIndex0,1,2などがあり、Checkが入れた座標はいま使用してるFrameになります。

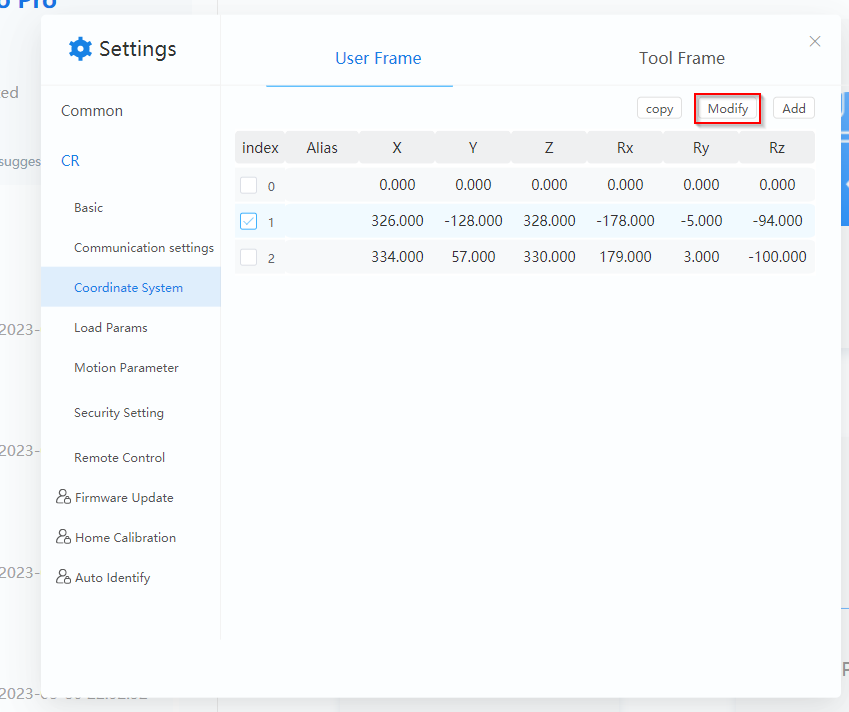
Modify
例えばいまIndex1のFrameを変更したい場合は、そのまま現在のロボットの座標を入力していただければOkです。
Modifyボタンをクリックします。
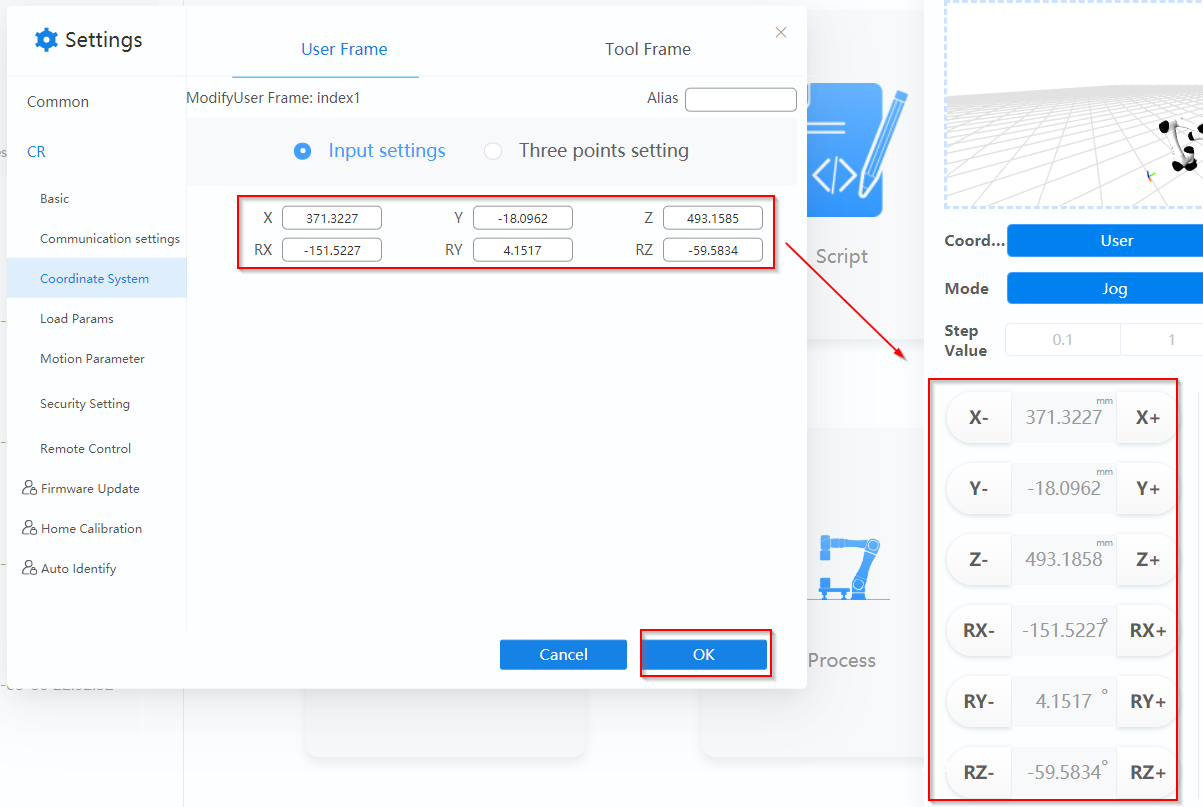
現在表示されている座標をそのまま入力し、Okすれば完成です。
Select Frame
Frameが設定した User Frameを変更してみます。Control TabにはUser FrameのDrop-listがあります。

Let’s Move it!
X 方向
Dobot.CR5 Moving X Direction in DobotStudioPro
Y 方向
Dobot.CR5 Moving Y Direction in DobotStudioPro
Z 方向
Dobot.CR5 Moving Z Direction in DobotStudioPro
RX 方向
Dobot.CR5 Moving RX Direction in DobotStudioPro
RY 方向
Dobot.CR5 Moving RY Direction in DobotStudioPro
RZ 方向
Dobot.CR5 Moving RZ Direction in DobotStudioPro
Moving Your Dobot in other Frame
Index0,1,2…のように選択できます。
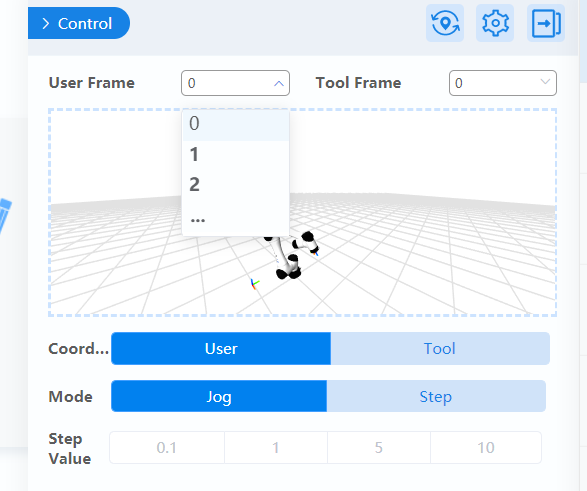
User Frame1を選択してみます。X/Y/Z/RX/RY/RZはいま0,0,0,0,0,0に変わります。つまりいまの座標はUser Frame1が基準として適用されます。

こちらの動画ではDobot CR5 がUser Frame1でX/Y/Z/RX/RY/RZを動かす動画です。
動画からはX/Y/Z/RX/RY/RZの座標は0/0/0/0/0/0から計算してる変わります。
Dobot.CR5 Moving Frame in all direction
直角座標+User Frametと関節座標で動かすの違いはこちらの動画から確認できます。
Dobot.CR5 Difference between Frame Moving and Joing Moving
こちらの動画をみると関節座標を動かすとFrame座標も変わることがわかります。
Dobot.CR5 Joint Move, Frame value also change
こちらの動画ではUser Frameが変更しても、関節座標もそのまま変わりません。