みんなさんこんにちわ。RoboDK第3話です。前回はRoboDKの簡単操作について簡単に説明しました。今回は実際ロボットプログラムを作成してみましょう。今回はABBのロボットをImportして説明します。
前回LINK
Target追加
まずTarget追加します。ここでつまりみんなさんよくやるTeachingですね。RobotにどんなPoint行きたいのかを示すのPointのことです。
では下図の赤枠ついてるボタンは現在Pointを記憶するためです。

そしてRobotを移動したいPointまで持っていててAdd TargetボタンでTarget追加(Point)。

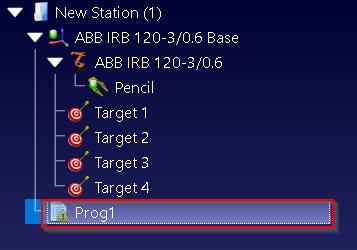
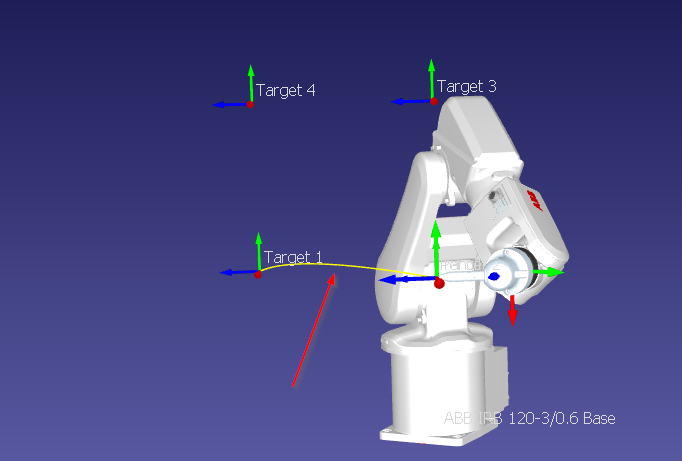
では仮に4つのTargetを設定しました。
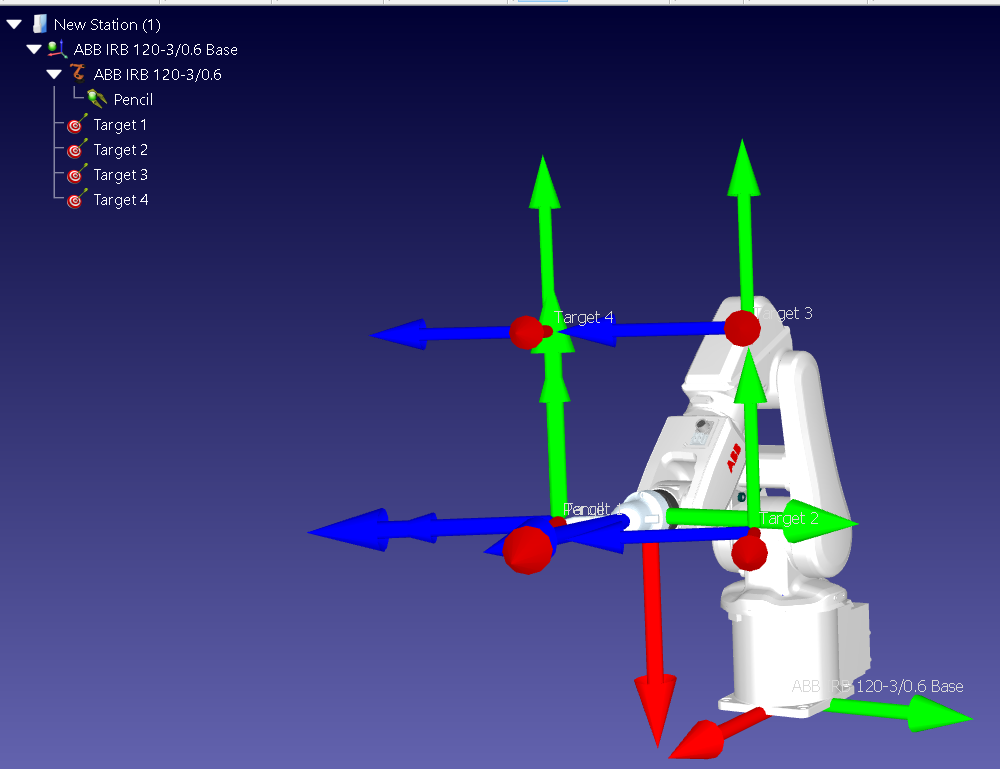
このようにTargetをクリックするだけでRobotは自動であのPointまで移動します。
Program 追加
Pointが追加されたら、次はプログラム作成のStepに入りますね!
Add a new program linked to the selected robotのボタンをクリックします。

そうすると左のMenuにロボットプログラムが追加されました。
Move Instruction追加
次はRobot Program追加ボタンのとなりに3つのボタンがあります。
それは指定のPointにJoint Moveか・Linear Moveなどを設定するものです。
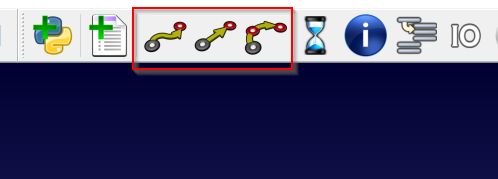
では一番簡単なJoint movementを追加しましょう。

このようにTargetを選んでる状態で先のAdd a joint movementボタンをクリックしたら、自動的プログラム内に”そのTargetまでJoint Movementする”の命令が追加されます。
Target5?
でも私が4つのTargetしか追加してないのに、なんでTarget5が出てきたんですか?
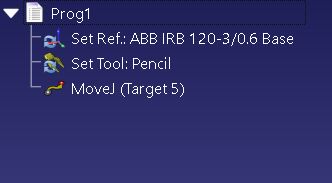
実際もTarget5も追加されましたね。
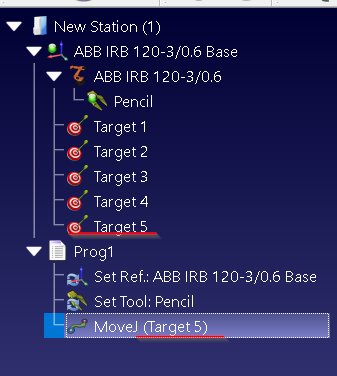
でも実際Target5見ますと、そのPointの場所はTarget1と同じですね。つまり、Targetを選んない状態でAdd a joint movementのような命令追加すると、RoboDKは”いまロボットの居場所”をMove命令の移動先として追加し、Targetも新規作成しますの意味です。

プログラムのMove命令を右クリックしTarget Linked>別のTargetに変更します。

でもTarget5はいりませんので、右クリックしでDeleteします。

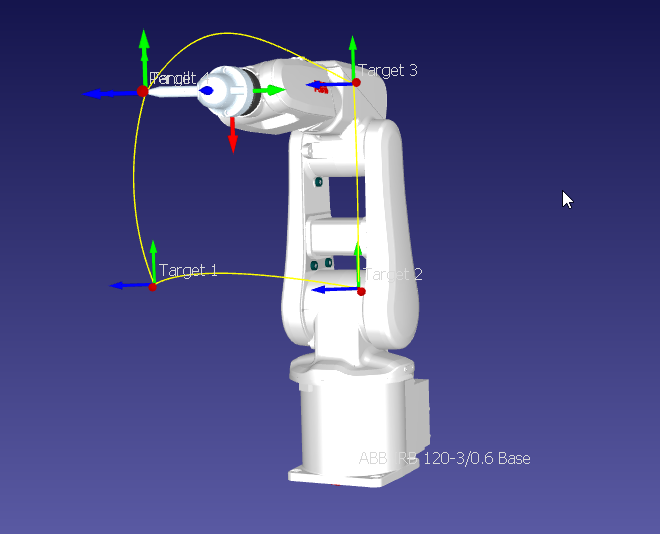
同じくProgramをクリックしますと、RobotがTargetまで移動します。
そして黄色の線は移動軌跡ですね。
よし、これ一応OKっぽいですね。
つまりこのような操作ですね。

Run
ではプログラムにRunをかけます。ロボットプログラムに右クリックしRunします。
Hot KeyからCtrl+RでもOKです。
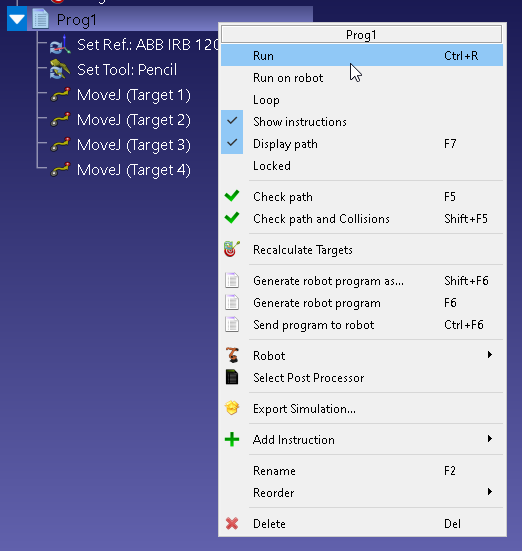
RobotDKはRobotどのように動くのかSimulationしてくれますね。

Move命令変更
Move命令のところに右クリックし>Linear Move・Joint Moveで選択すればOKです。

Loop
RobotプログラムをLoopで実行したいなら、Programで右クリックし>Loopを設定します。そしてもう一度RunかければOKです。

このように無限に走りますね。
Speed adjust
最後はSimulationのSpeedを設定します。
そのSet default Normal Simlation Speed(5)のSlide Barを調整すればよです。

つまりこのようなイメージの操作です。