みんなさん、おはよう御座います。今回はFANUCの第9話になりました。ToolsFrameについて紹介しますのでよろしくおねがいしますね。
いままでのFANUC記事は下記のLinkで参考してください:
http://soup01.com/ja/category/work_jp/%e3%83%ad%e3%83%9c%e3%83%83%e3%83%88/fanuc/
Frameとは?
まずTool Frameを説明する前に、Frameってなんでしょうか。
Frameを使うことによって、ロボットプログラムなどに様々なメリットが与えてくれます。
Fixtures・PartsにとってUser Frameが使うことになるでしょう。User Frameを使うことによってあなたがいくつのPointをだけ定義し、プログラム上ではそれらの”Point”だけベースに作成することが可能です。もしPartsの場所が変えたり、あなたが必要なのはUser FrameだけをRe-Teachになります。相対位置のようなイメージですね。
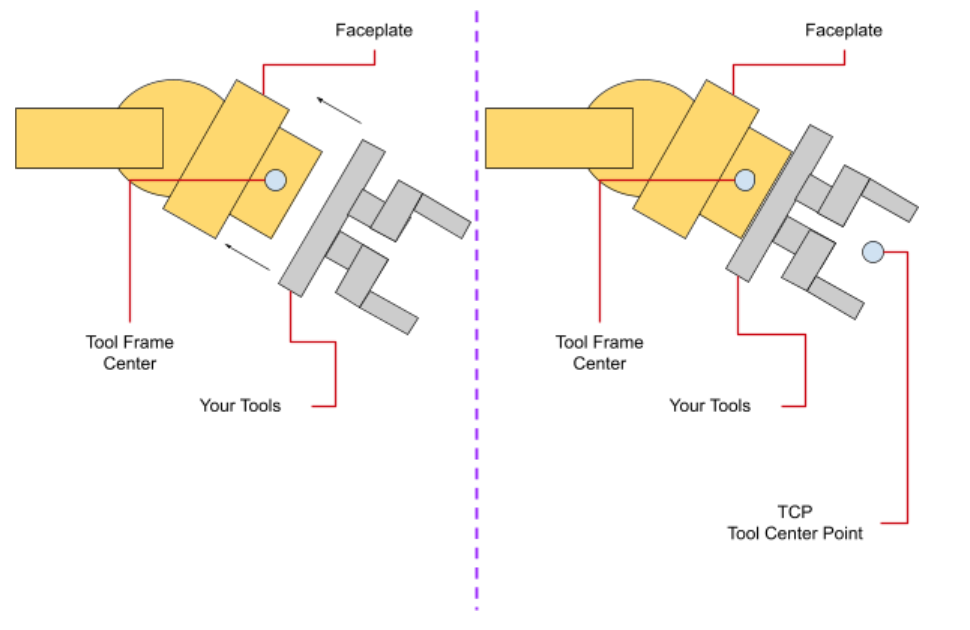
ツールのPointsにっては上の図みたいにPointerが取り付けされて、あなたが集中したいのはあのツールの先だけになります。(TCP,Tool Center Point)
Processにとっては工程は変更になるとあなたが必要なのはUser FrameやTool Frameを再指定すればOKです。
Joggingにとっては…まぁ。私が理解するまでまだ経験必要かもしれません。
Frameの種類?
World Frame
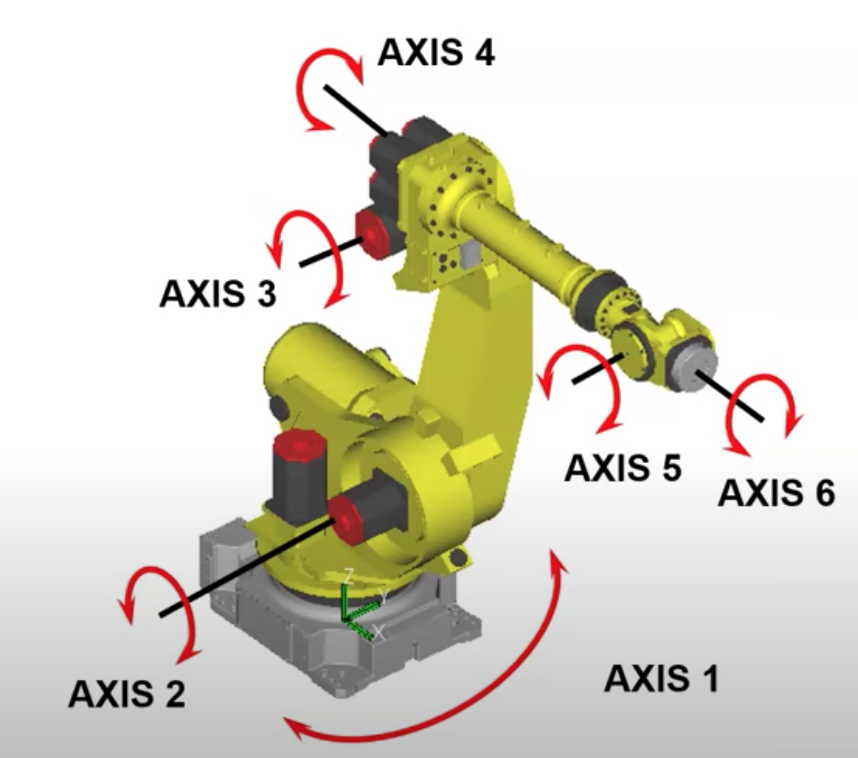
これはRobotのMain Frameになります。すべてのUser Frame・Tool FrameなどもそのWorld Frameに参照しています。普通はAxis1・Axis2の間のことです。
Tool Frame
TCPのこと、Default上ではFaceplateだと設定されています。例えば下図のようにロボットがPointerに取り付けされて、作業するときは一番集中してほしいのはそのPointerの先ですね。あの緑のボールのことです。
つまりこのようなイメージですね。
実験A:Tool FrameのZは0
Tools・Fixture・Partsの追加や設定方法はここで説明しません。
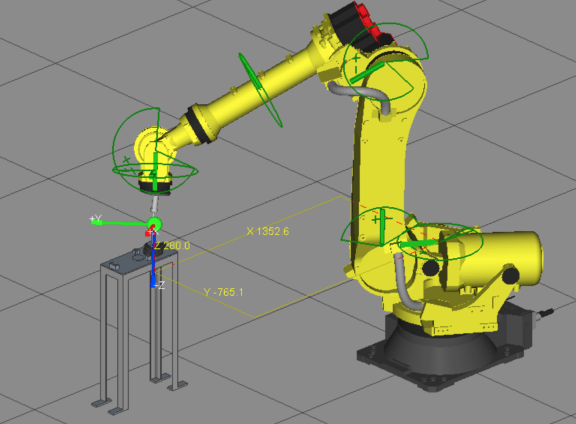
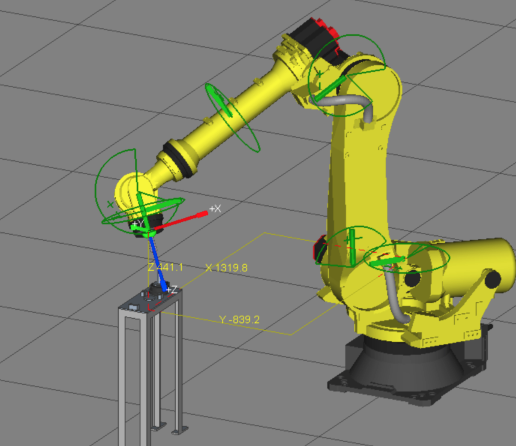
簡単にいいますと、Robotがあって、Tableがあって、そしてロボットにPointerというToolを装着しています。
MENU>SETUP>FRAMESでFrame設定画面入ります。
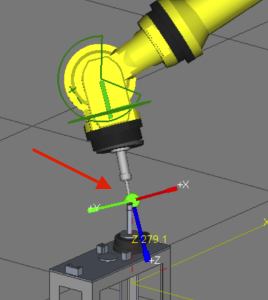
私はそのPointerツールがFANUCライブラリから追加したので、DefaultもZ=180が入っています。ここで一旦0にします。

実際Axis4とAxis5をJogで動かしてみようと思いますが、どうにもPointerがTable上のPinにぐるぐる回っていますね。
実験B:Tool FrameのZは180
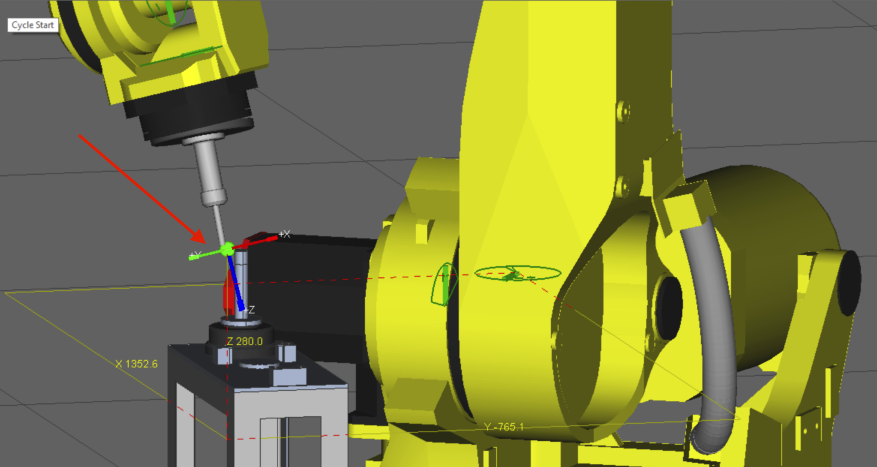
今度はTool Frameを180にします。

同じくAxis4,5を動かしてみますと、ロボットがToolの先を中心に動くにはわかります。

最後に
はーい、お疲れ様ーです。
このシリーズではFANUCのロボットとROBOGUIDEを使用について勉強用のメモになります。あくまでも個人的書いてたものなので、実際使うときには安全を注意し、経験あるエンジニアと一緒に作業してくださいね。