こちらの記事ではFANUC CNC 32i Model BでEtherent/IP Scannerを立ち上げる手順を説明し、AdapterはFANUC LR Mate 200iD になります。CNCの操作は初めてなので写真の説明が多かったです。
さ、始めよう!

前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
現在、私達の活動はほぼ無償で続けており、より多くのコンテンツを提供するためには、皆様の温かいご支援が大変重要です。もし可能であれば、以下のリンクから応援していただけると大変嬉しく思います。
高橋クリスのメンバーシップ
こちらはFullさん(full@桜 八重 (@fulhause) / X)と共にやっているラジオにメンバーシップを登録いただけます。
https://note.com/fulhause/membership/join
AMAZON ギフトリスト
こちらは自分のブログのコンテンツ制作や設備の充実に大いに役立てさせていただきます。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon
こちらは自分のブログのコンテンツ制作や設備の充実に対する小さな応援の気持ちのPatreonです。
https://www.patreon.com/user?u=84249391
皆様のサポートが、私たちの活動をより充実させる力となります。
どうぞよろしくお願いします。
メールアドレス(*=@)
X
Implementation
Robot Side
Reference Link
FANUC Robot ControllerのEtherent/IP関連設定は下記の記事Linkで参考にしてください。
Configure the Connection
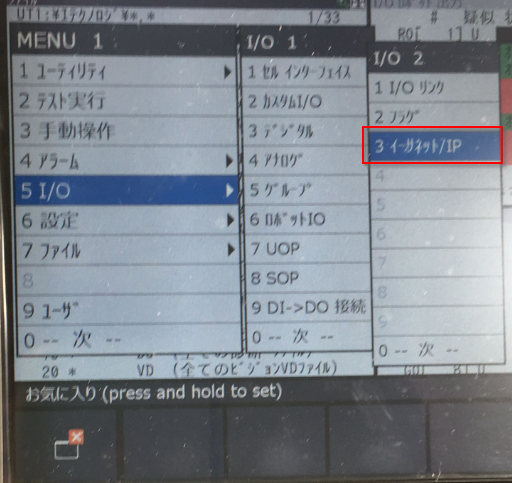
FANUC ロボットControllerのEtherent/IP設定は昔も書きましたので、ここで詳しく説明しません。MENU1>I/O 2>イーサネット/IPをクリックします。
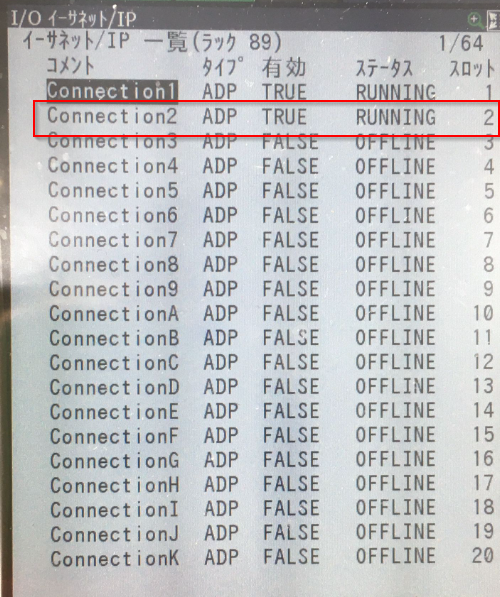
今回使用するのはConnection2です。
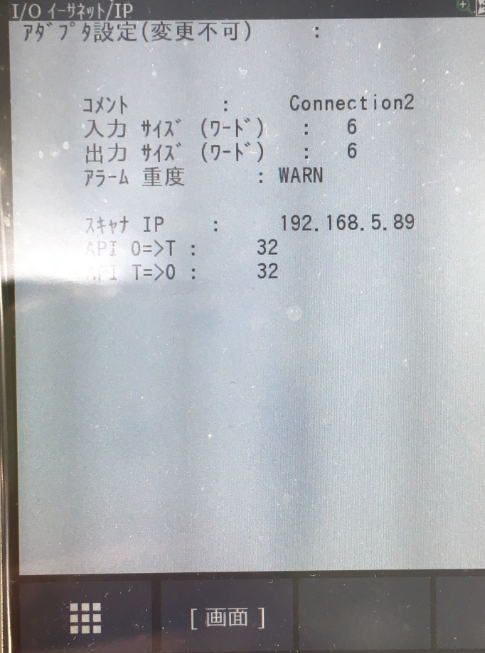
入力サイズ・出力サイズをアプリケーションに合わせて設定しましょう。
CNC Side
Ethernet Setup
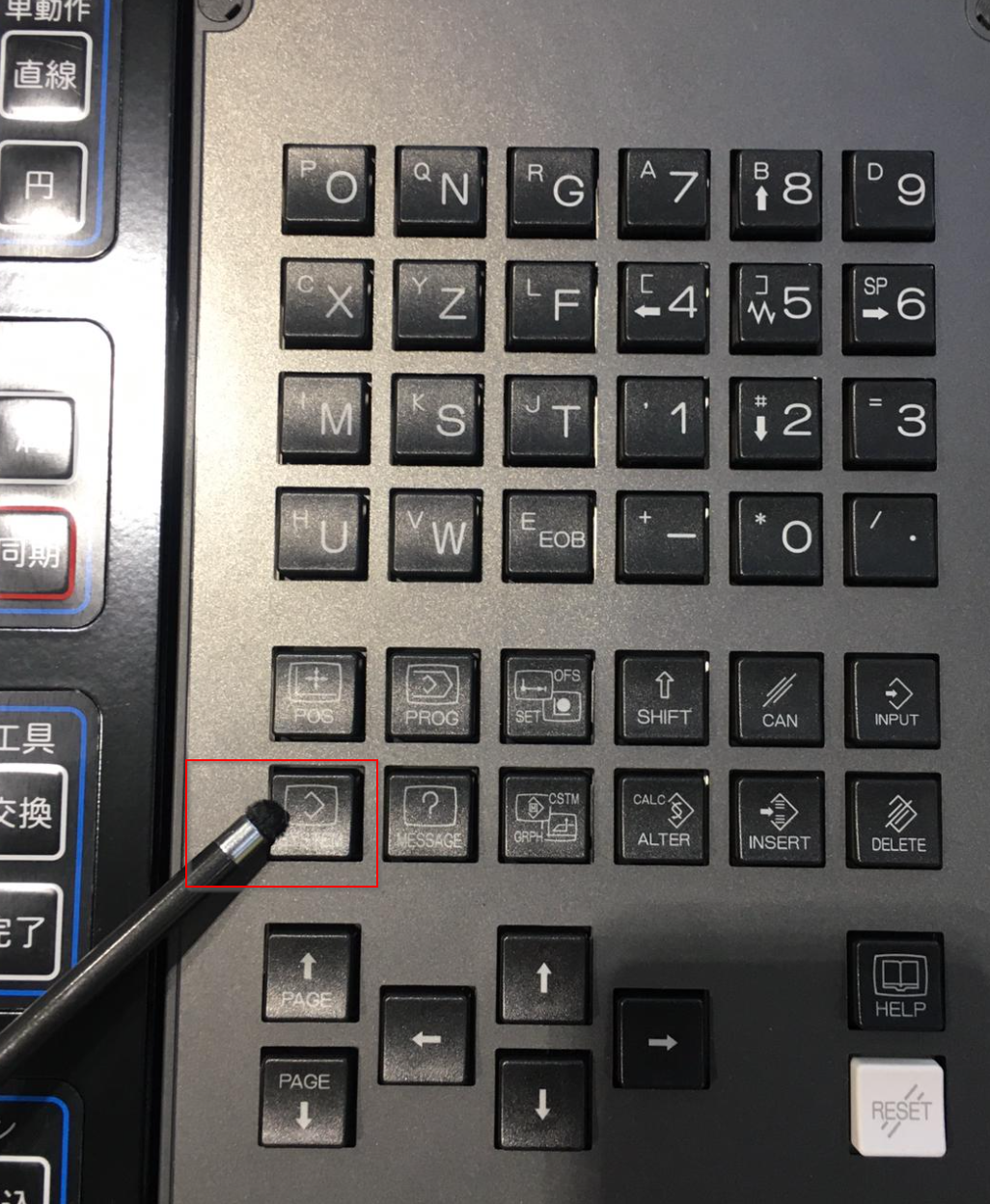
CNCのEthernet設定をするため、KeypadにあるSYSTEMボタンを押します。
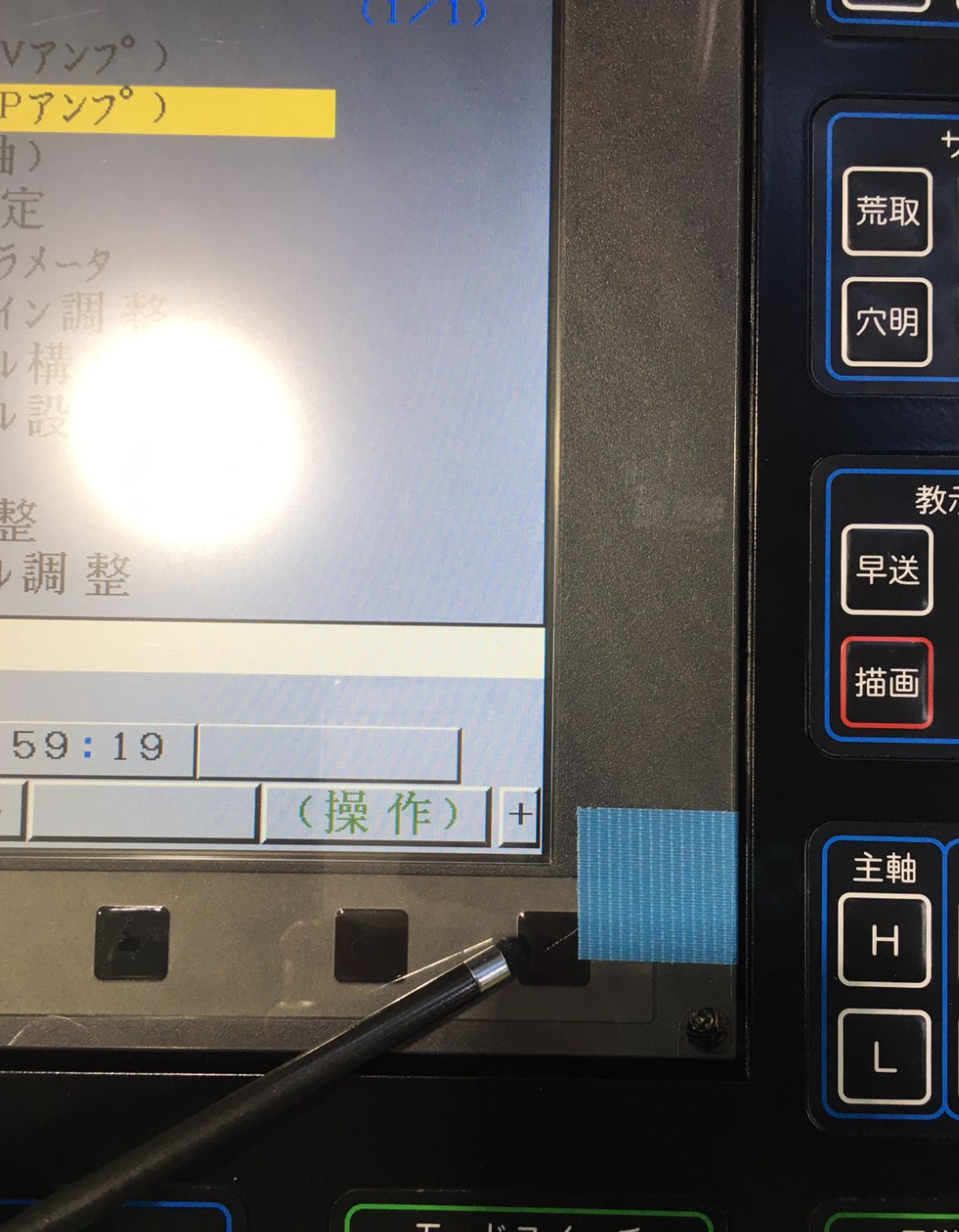
+ボタンを押します。
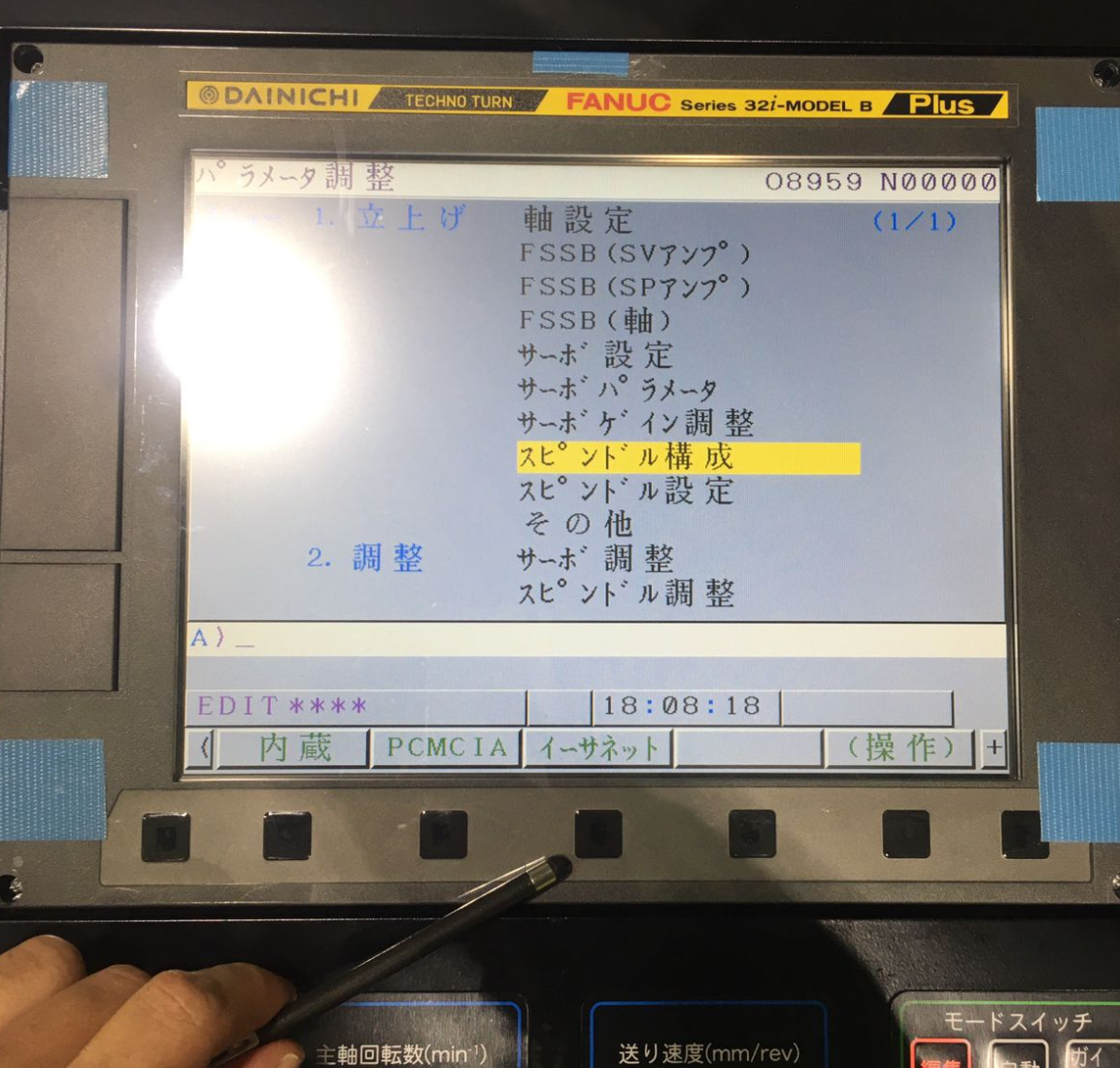
パラメータ設定画面に変わり>イーサネットをクリックします。
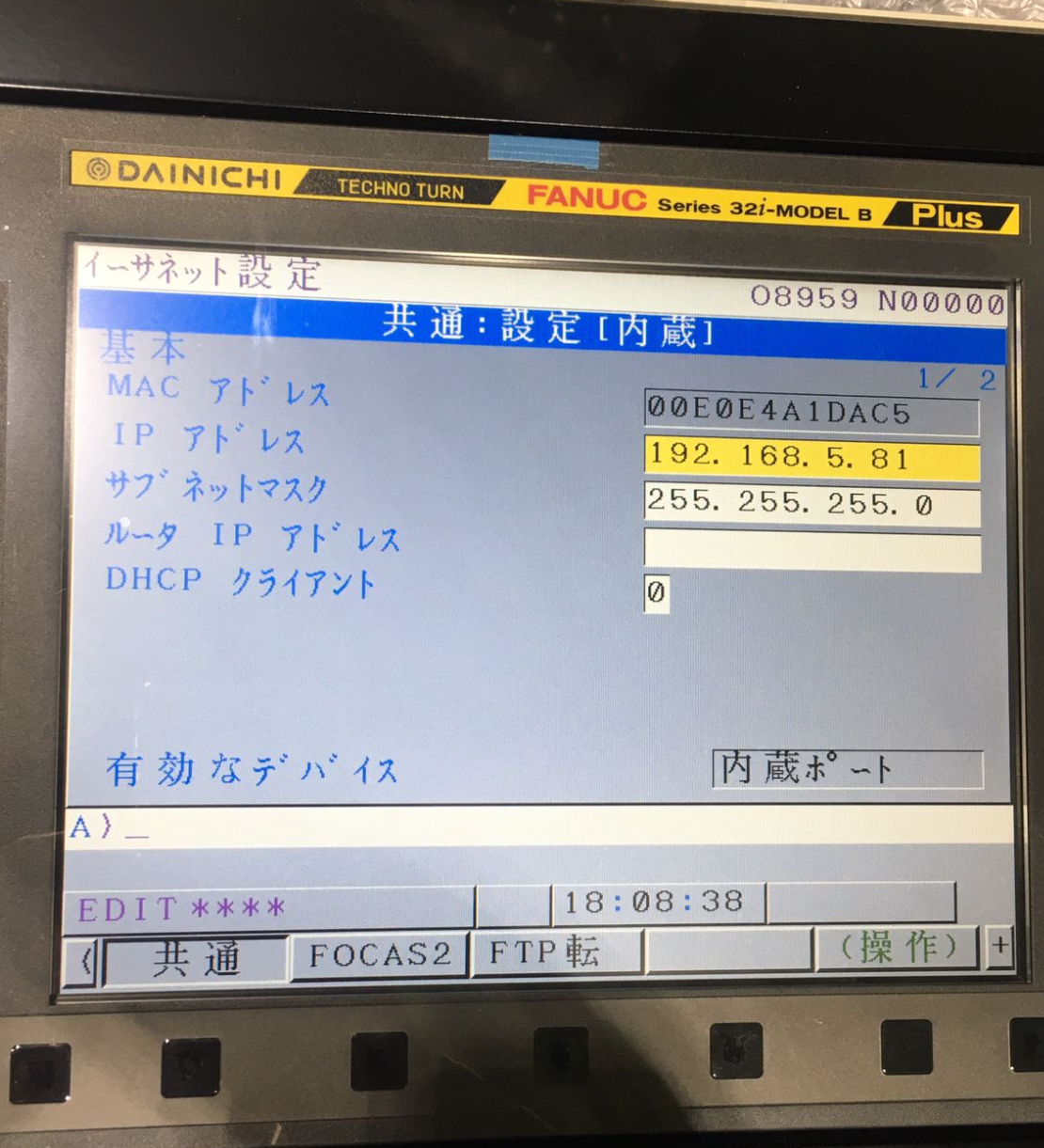
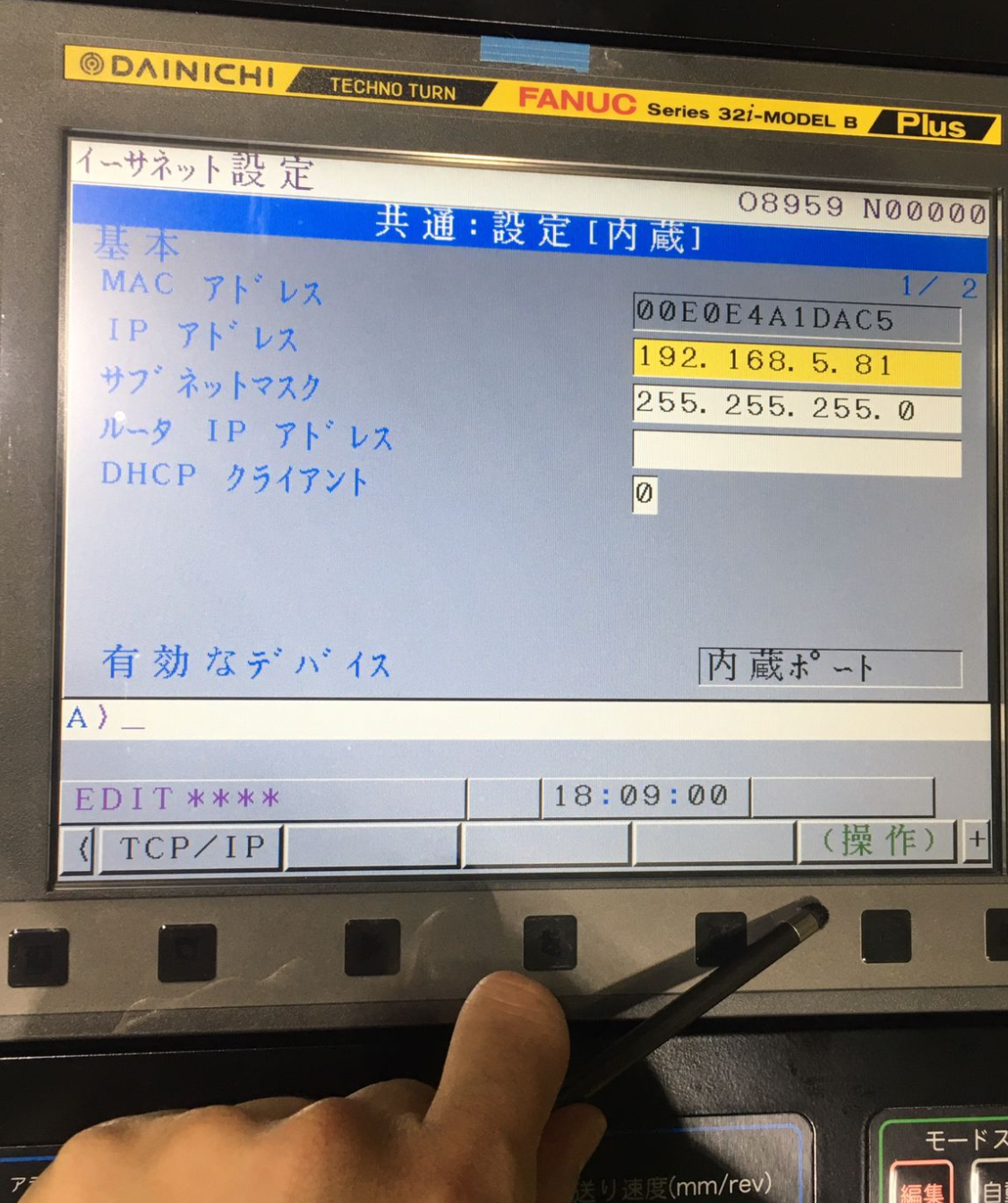
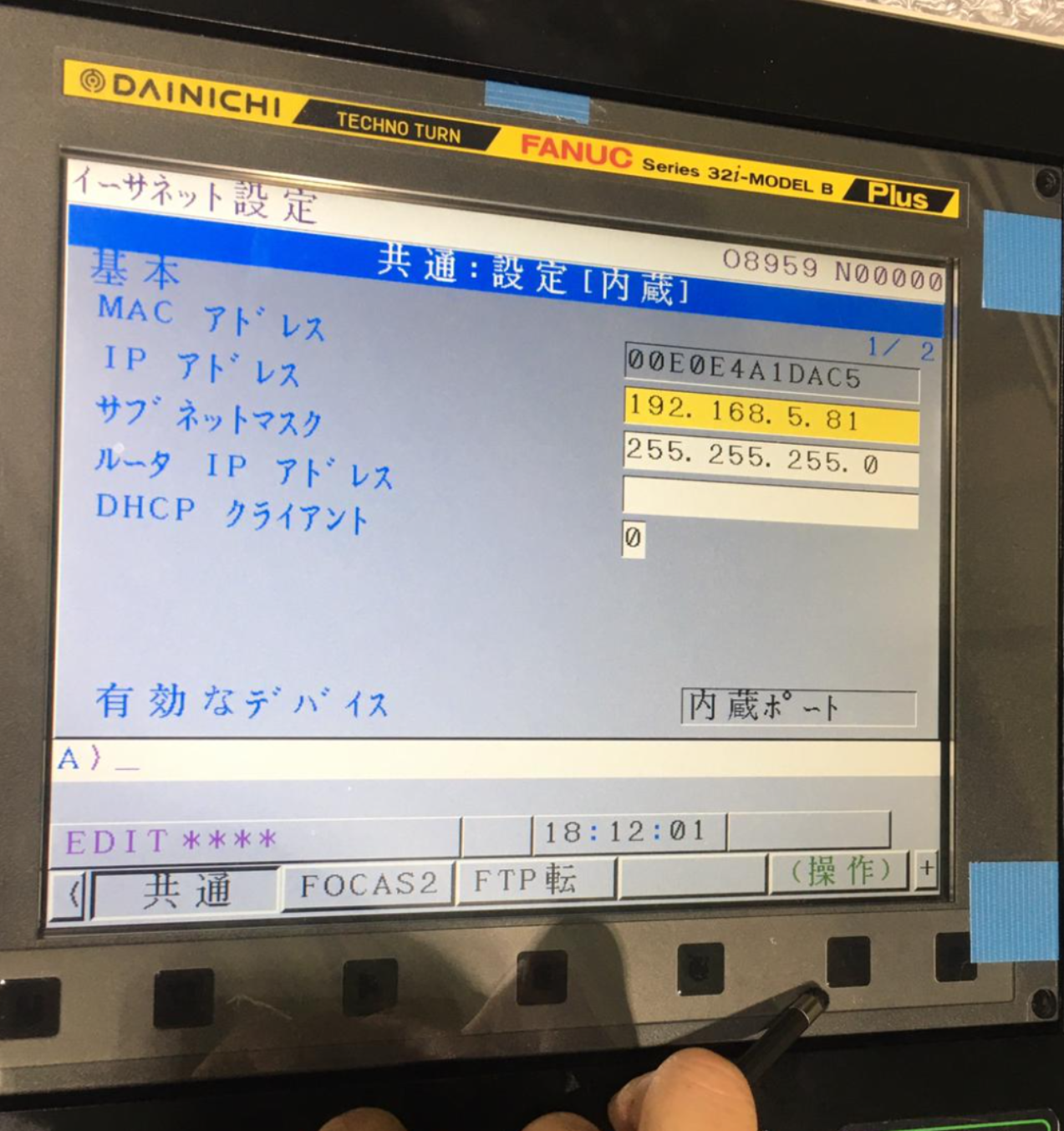
こちらはFANUC CNCのIPアドレスなどに関連するEthernet設定画面になります。
IPアドレスなどをネットワーク構成に合わせて設定しましょう。
Ethernet/IP Setup
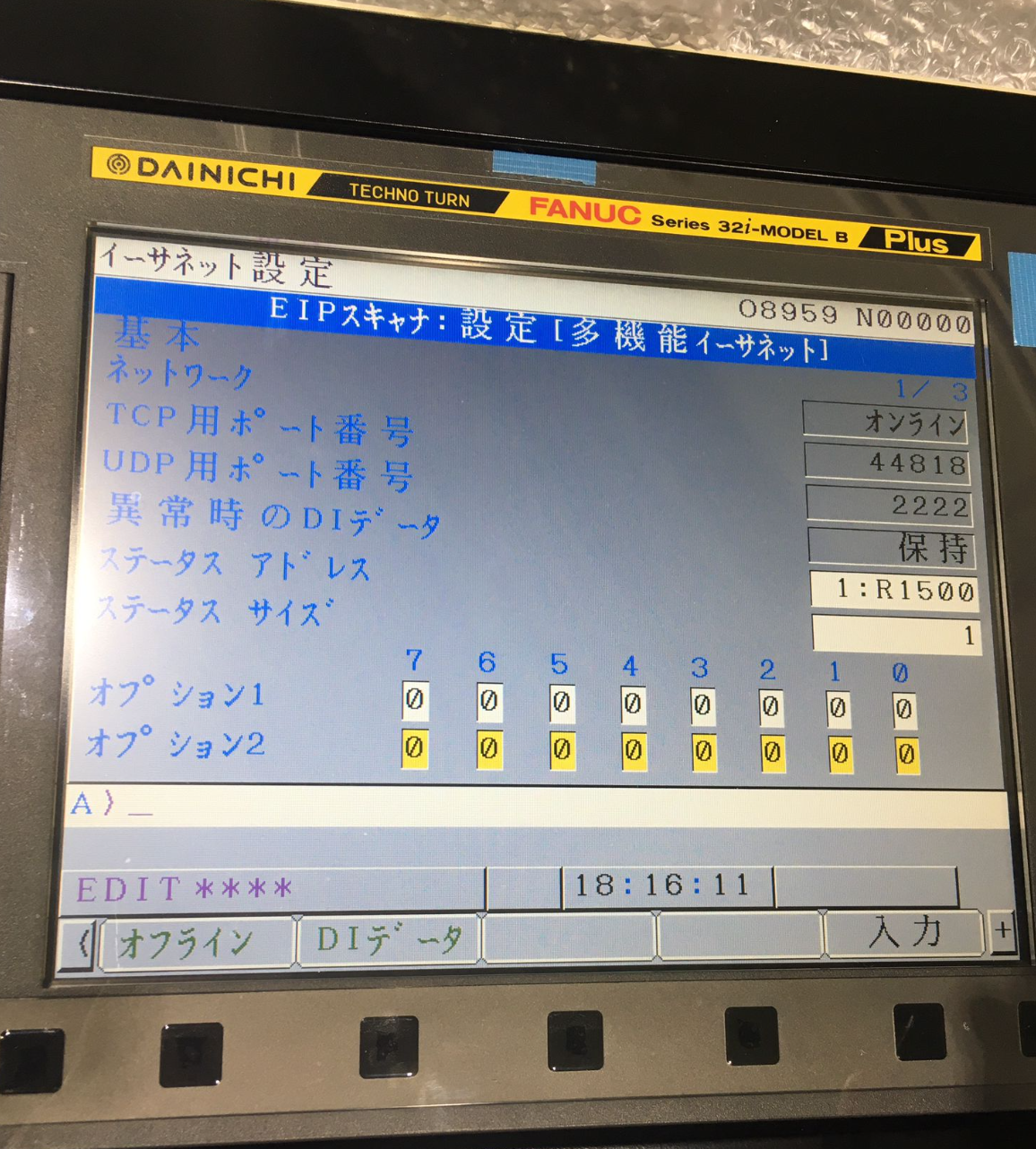
次はCNCのEthernet/IPの設定を行うため、操作をクリックします。
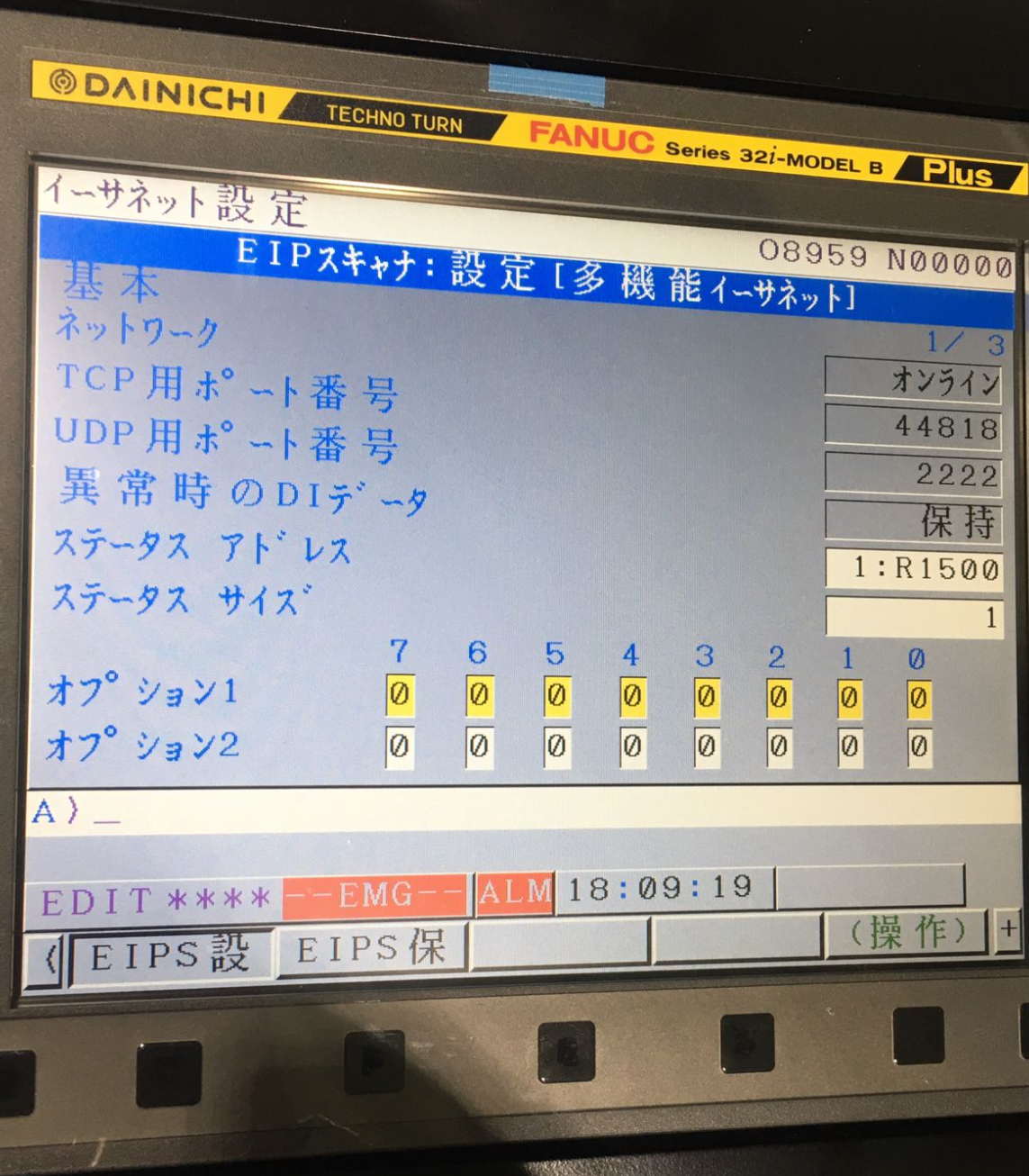
EIPスキャナ:設定画面に変わります。
Connection設定
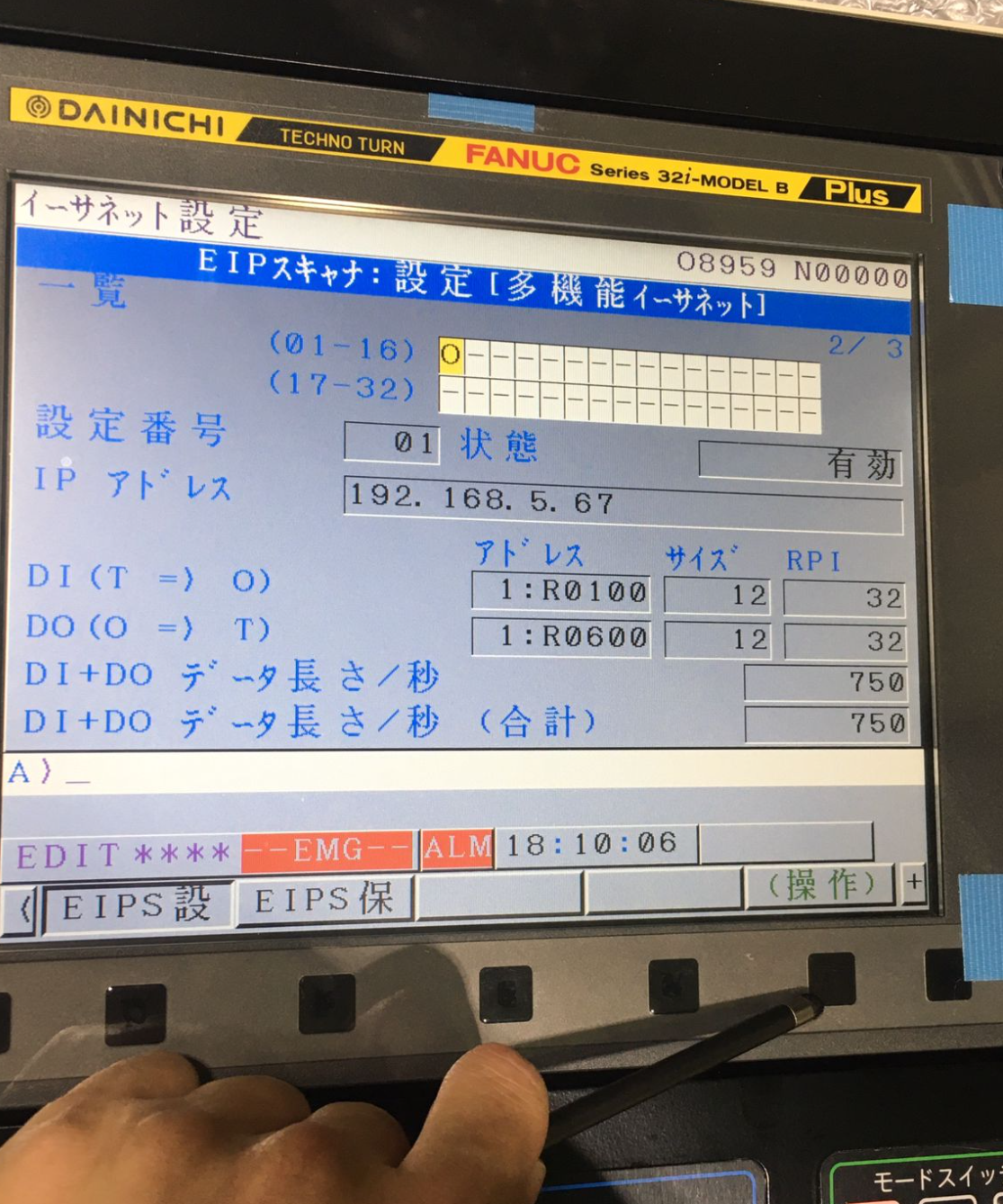
Keypadにある下矢印キーを押し、2ページ目のEIPスキャナ画面に行きます。

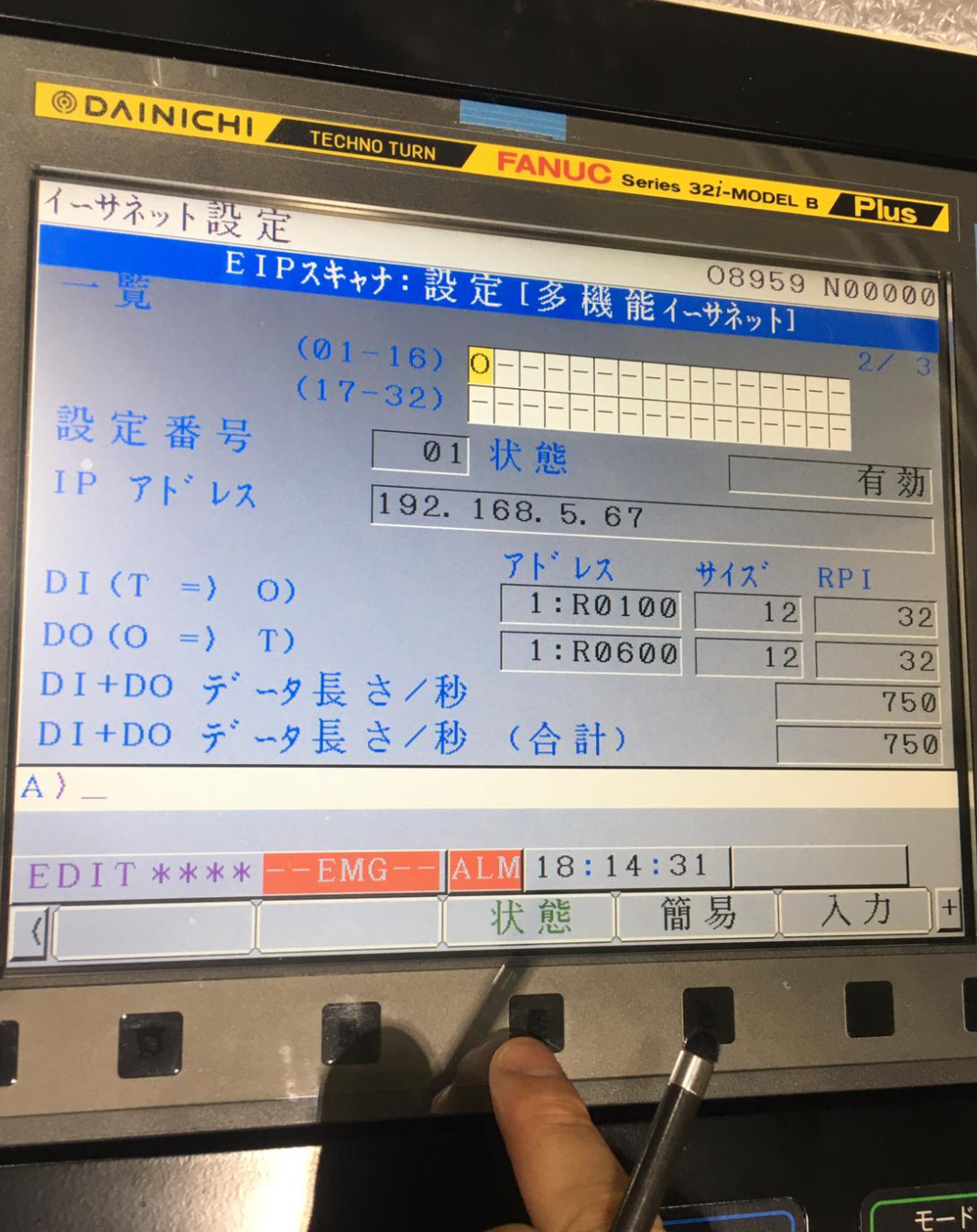
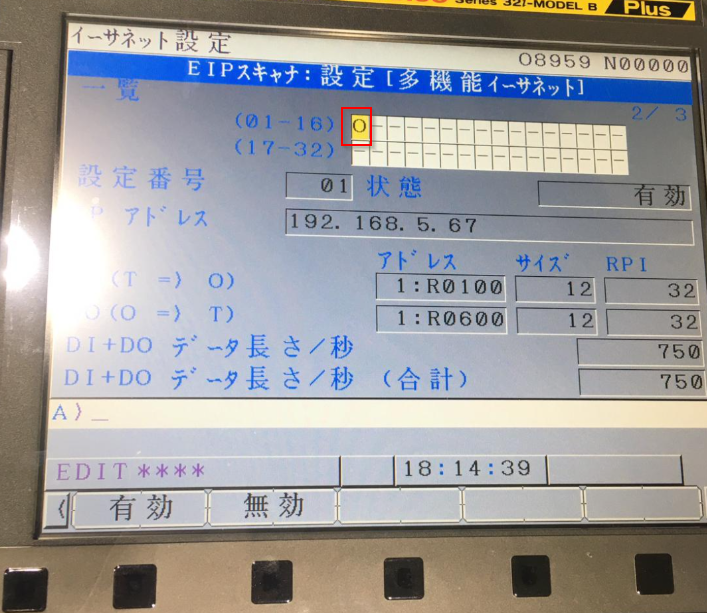
一覧
一覧のところに現在使用中のConnectionを表示します。
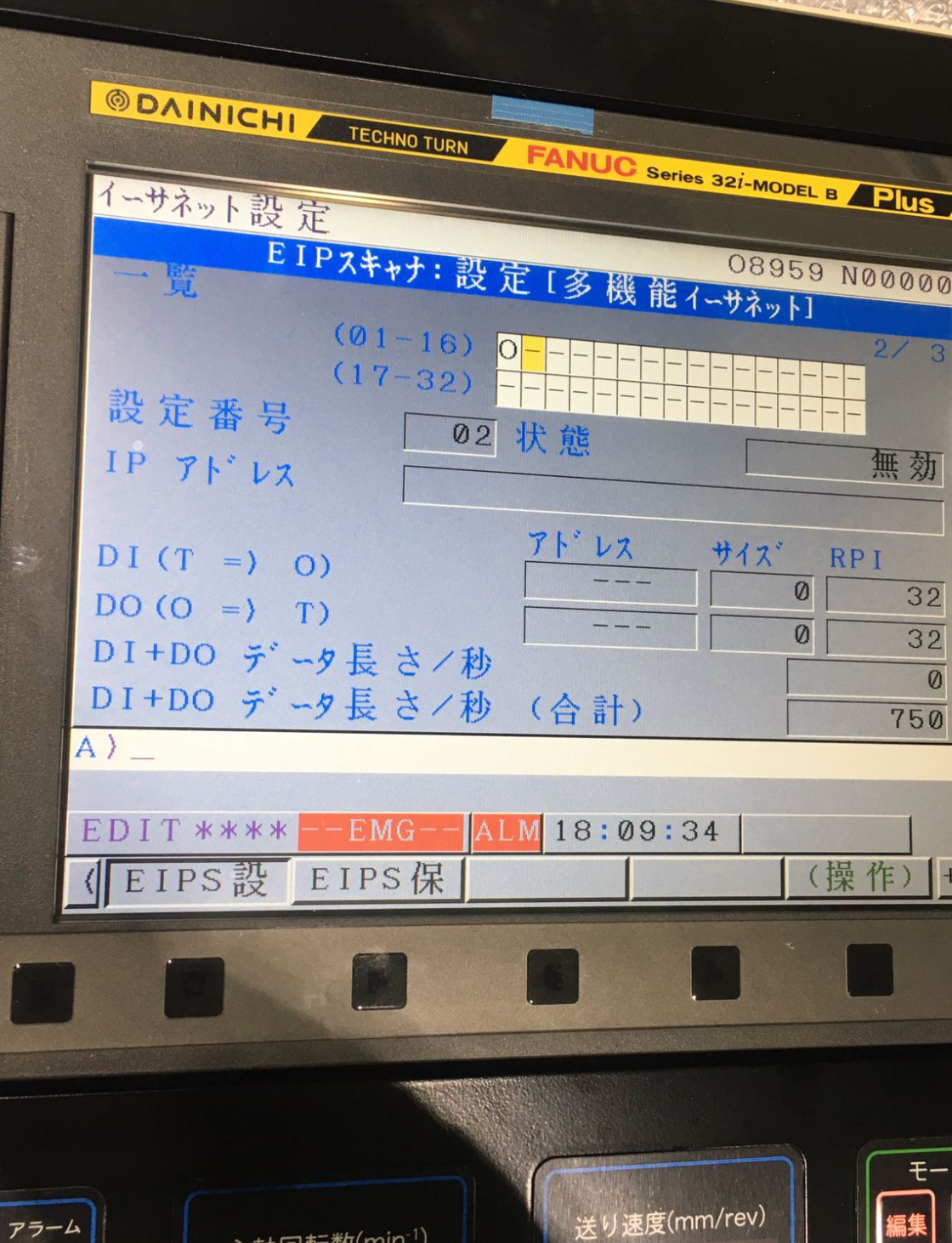
上はConnection1から16、下は17-32、合計32個のAdapterと接続できます。
そして”O”がついているのは使用中のConnection番号、なおかつ通信エラーなしです。
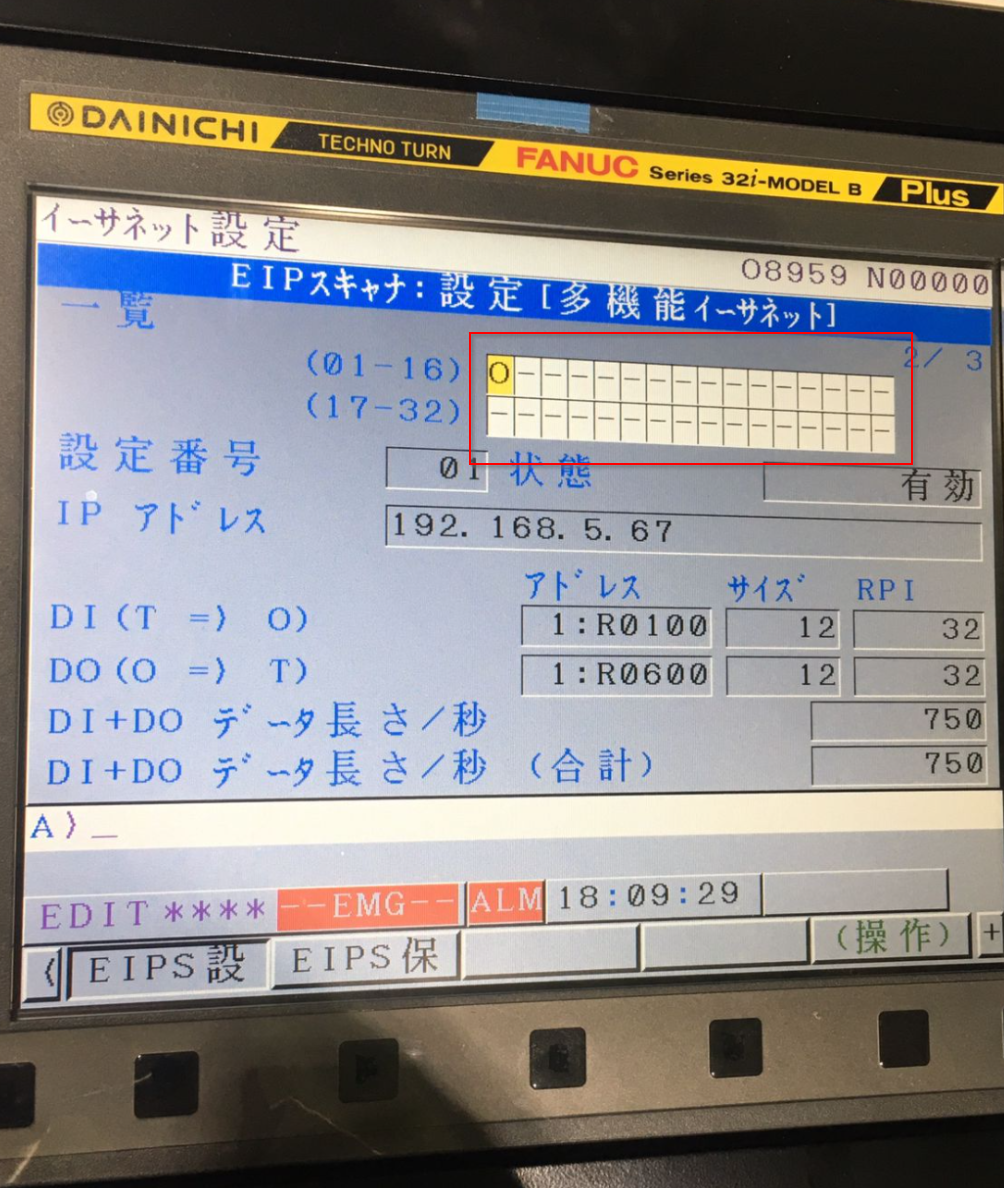
下図ではConnection1のみ使用されています。
Connection有効
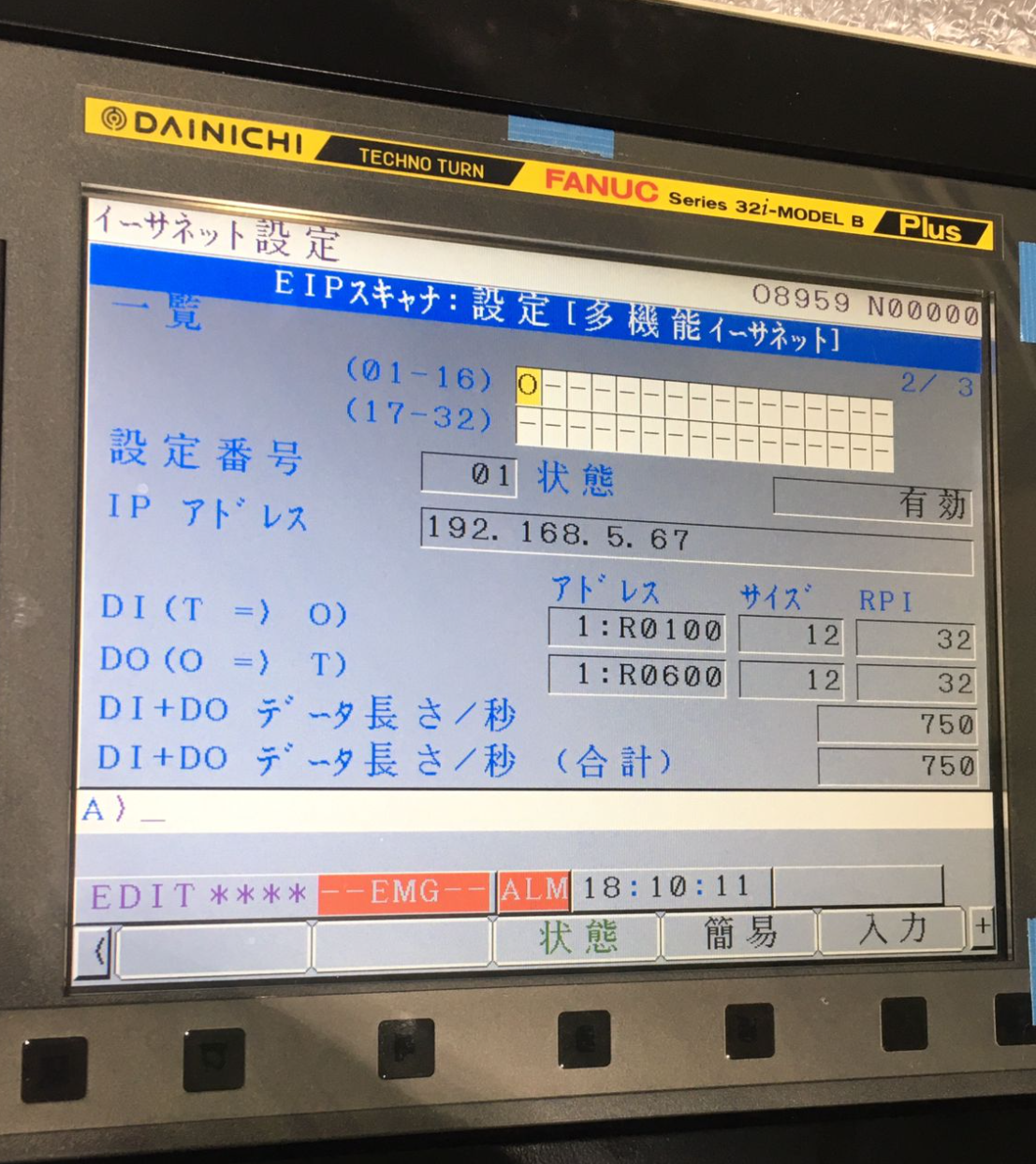
今回はConnection01を使用しますので、01を有効にするため、操作ボタンをクリックします。
入力ボタンでConnectionを有効しましょう。
簡易設定
次はEIPスキャナと接続Adapterの通信設定を設定するため、”簡易”をクリックします。
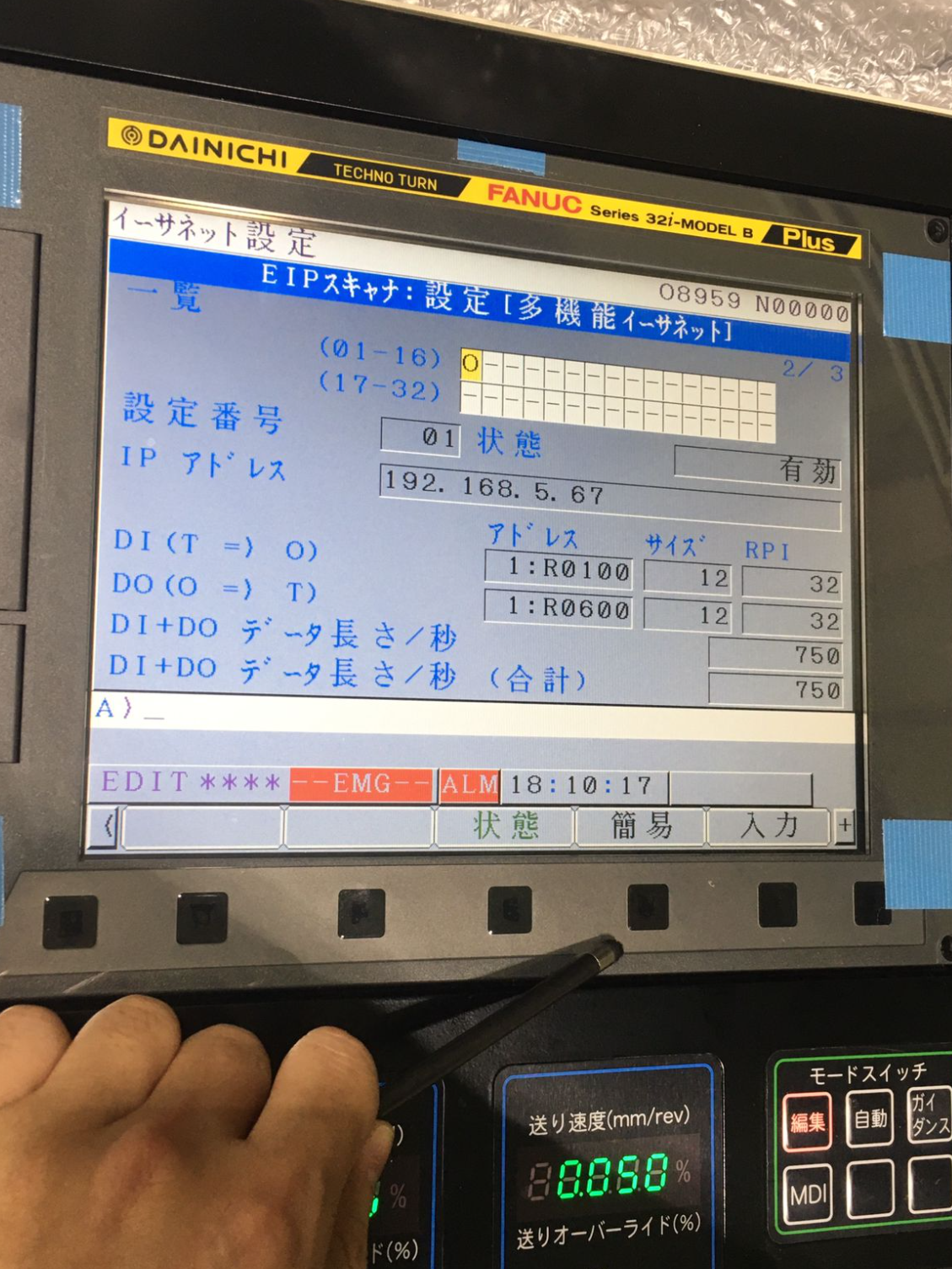
EIPスキャナの簡易設定画面に変わりました。
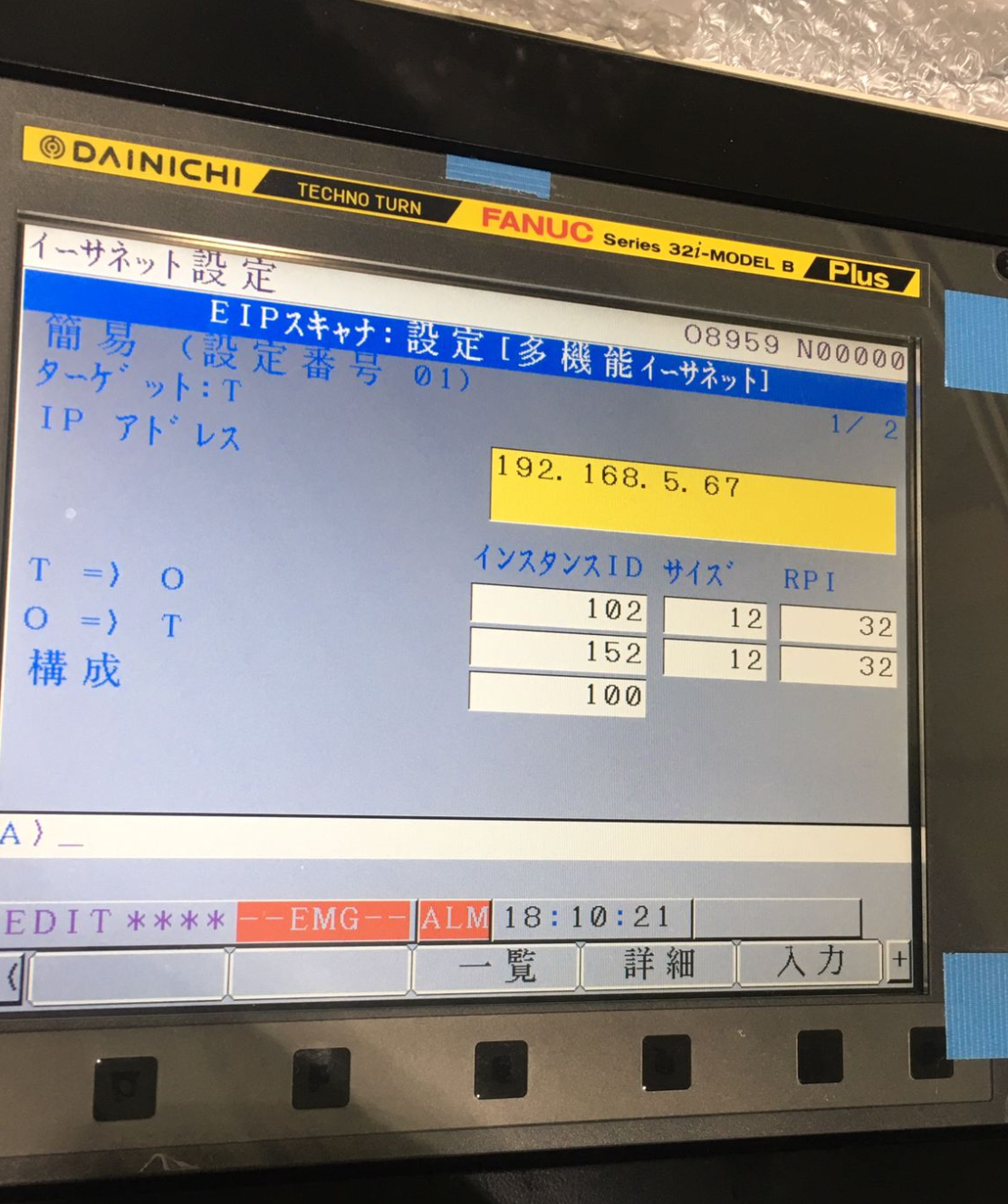
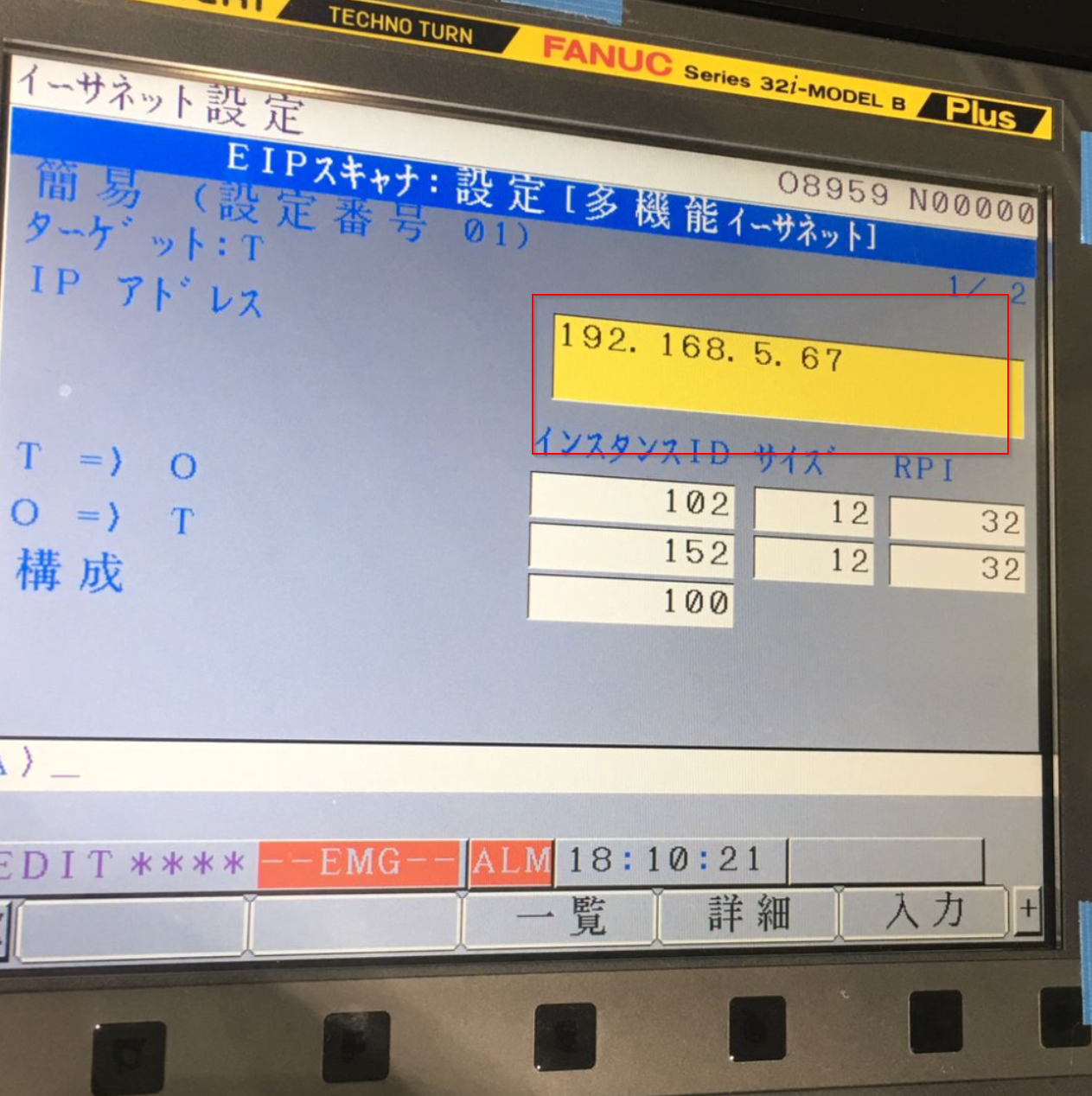
IPアドレス
まずIPアドレスをロボットControllerに合わせて設定します。
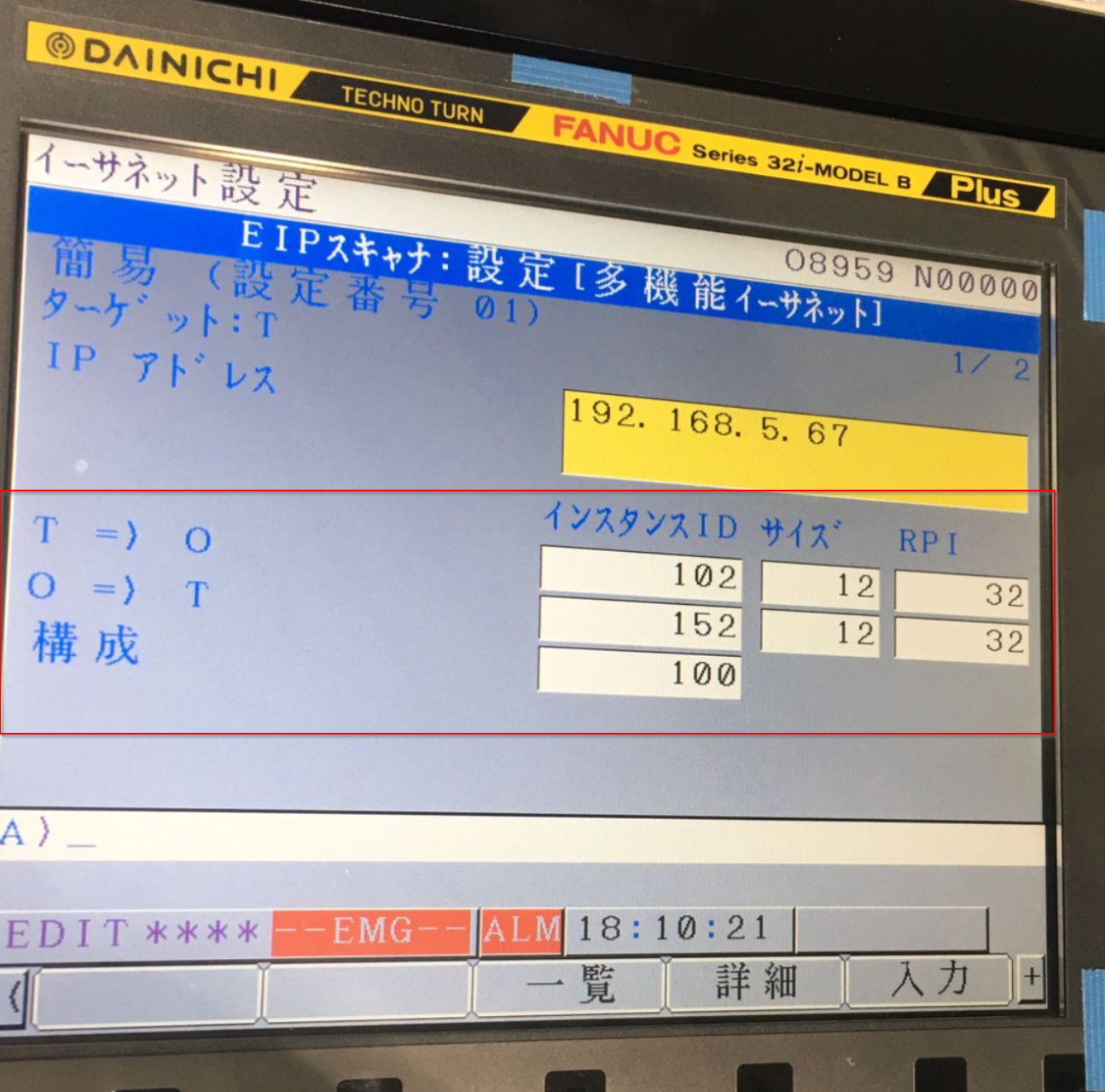
通信設定
通信設定はインスタンスIDや交換データサイズ(Byte)などを設定します。ちなみにFANUC ロボットがAdapterの場合、設定は以下になります。
- Connection1なら、T=>OのInstance IDは101、O=>のInstanceは151
- Connection2なら、T=>OのInstance IDは102、O=>のInstanceは152
のようになります。構成インスタンスIDは常に100で、サイズはRobot Controllerで設定した交換サイズに合わせましょう。RPIは更新周期で実際のアプリケーションに合わせてください。
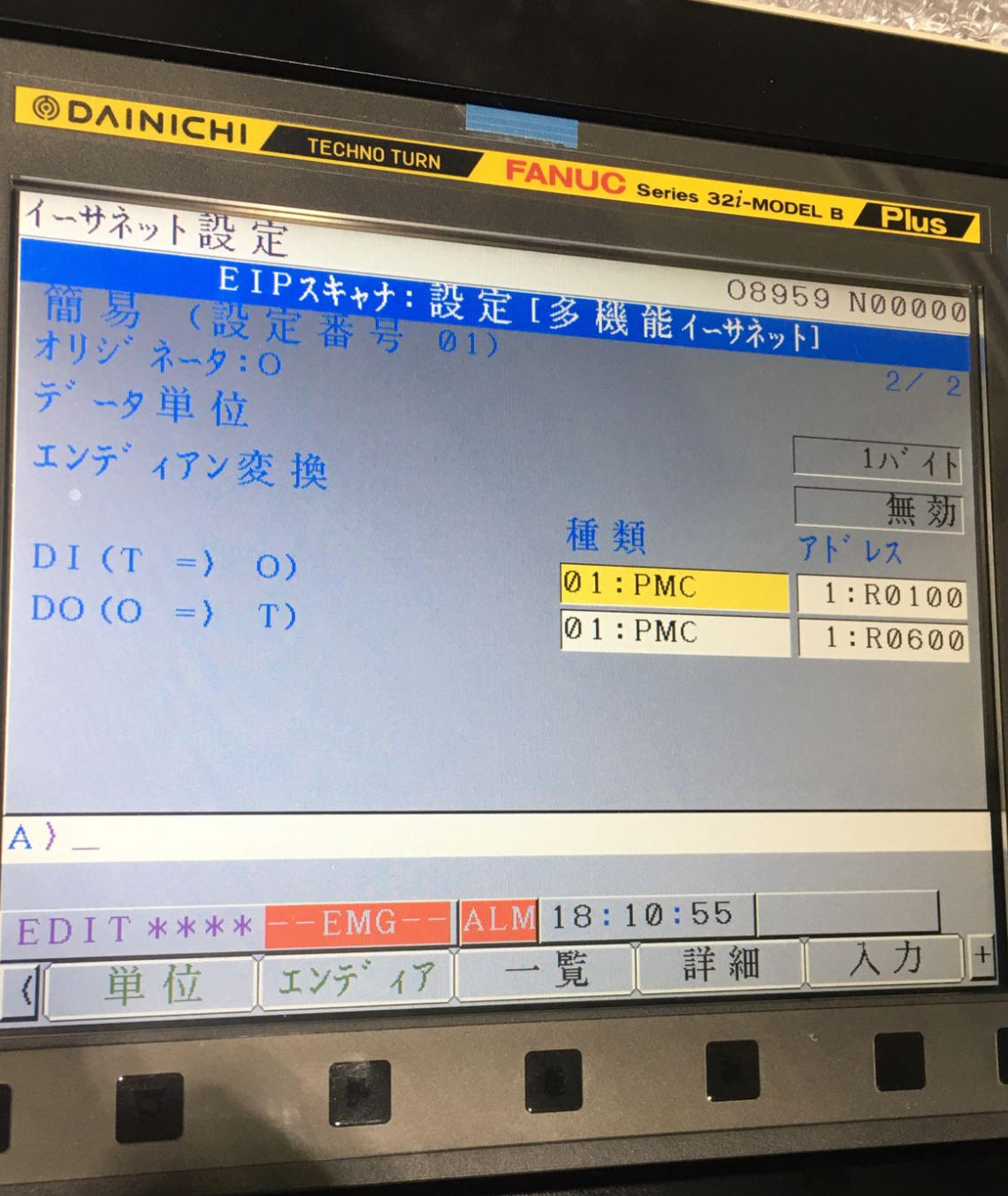
PMC設定
Ethernet/IP経由で交換したDI(入力)とDO(出力)はFANUC CNCの内部転送設定になります。
種類は01:PMCに設定し、アドレスはプログラムにかぶらないように設定しましょう。
今回の例ではDIはR100から、DOはR600からになります。
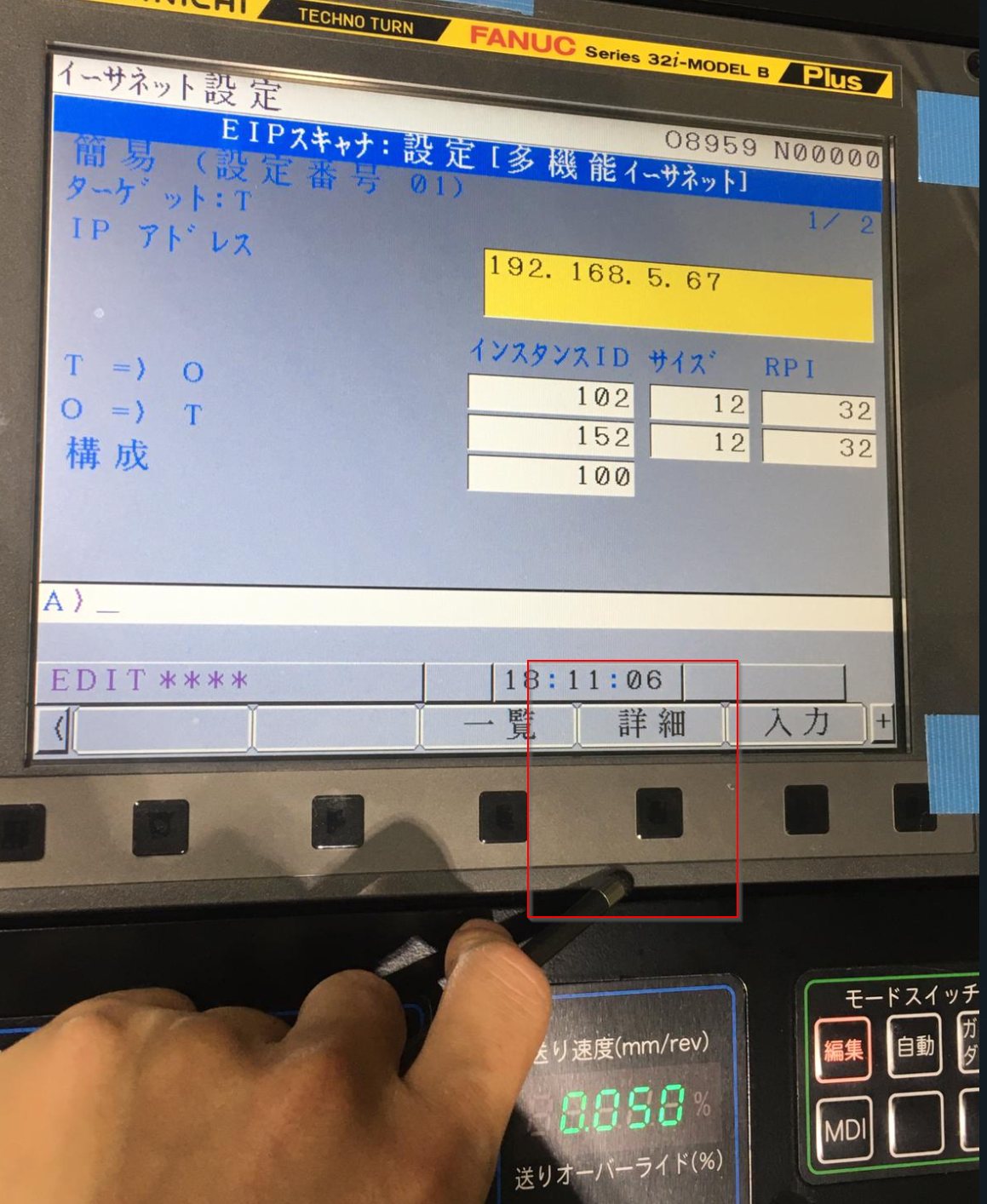
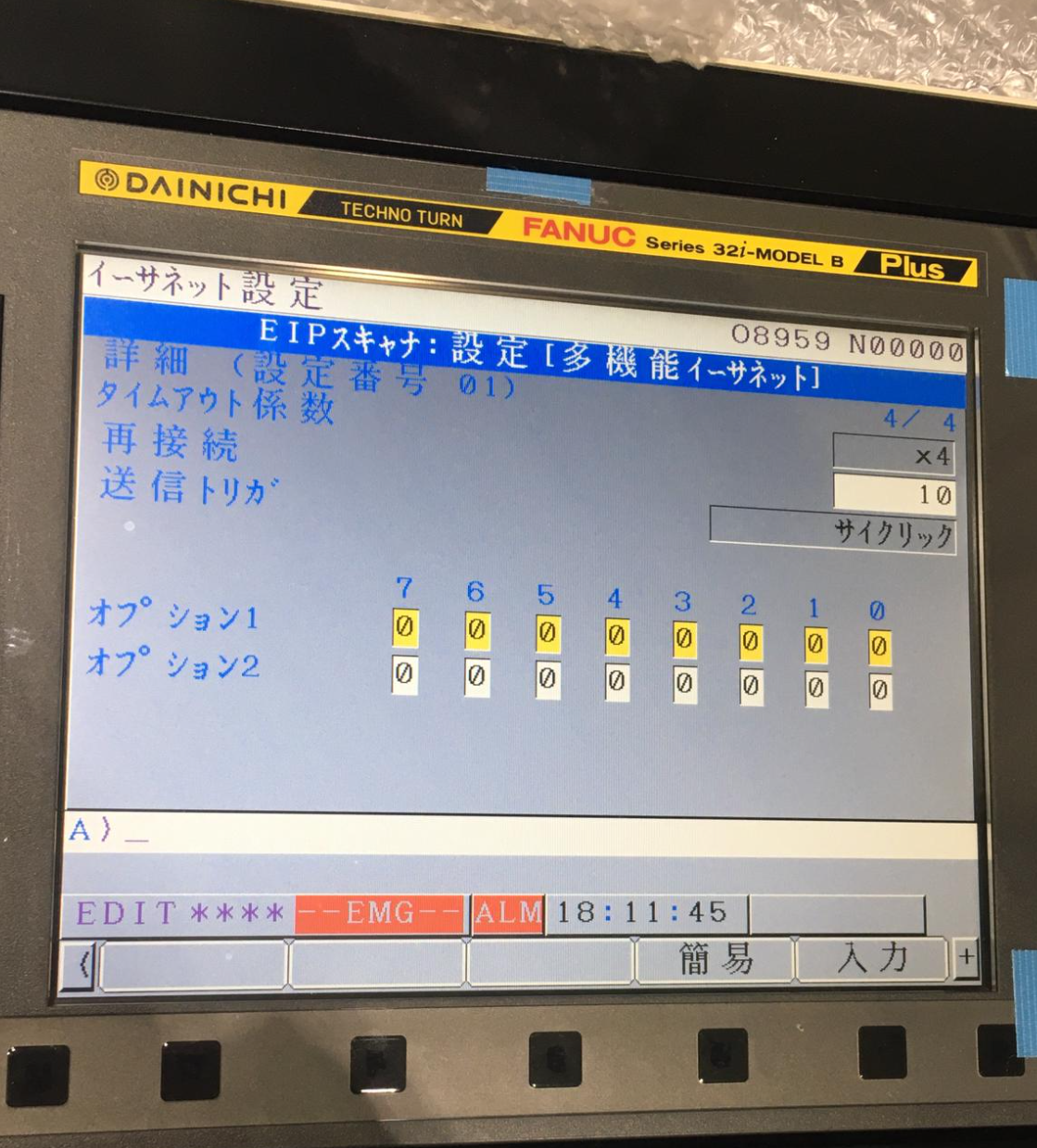
詳細設定
次はEthernet/IPの詳細設定を見ていきましょう。
こちらはEIPスキャナの詳細設定画面です。
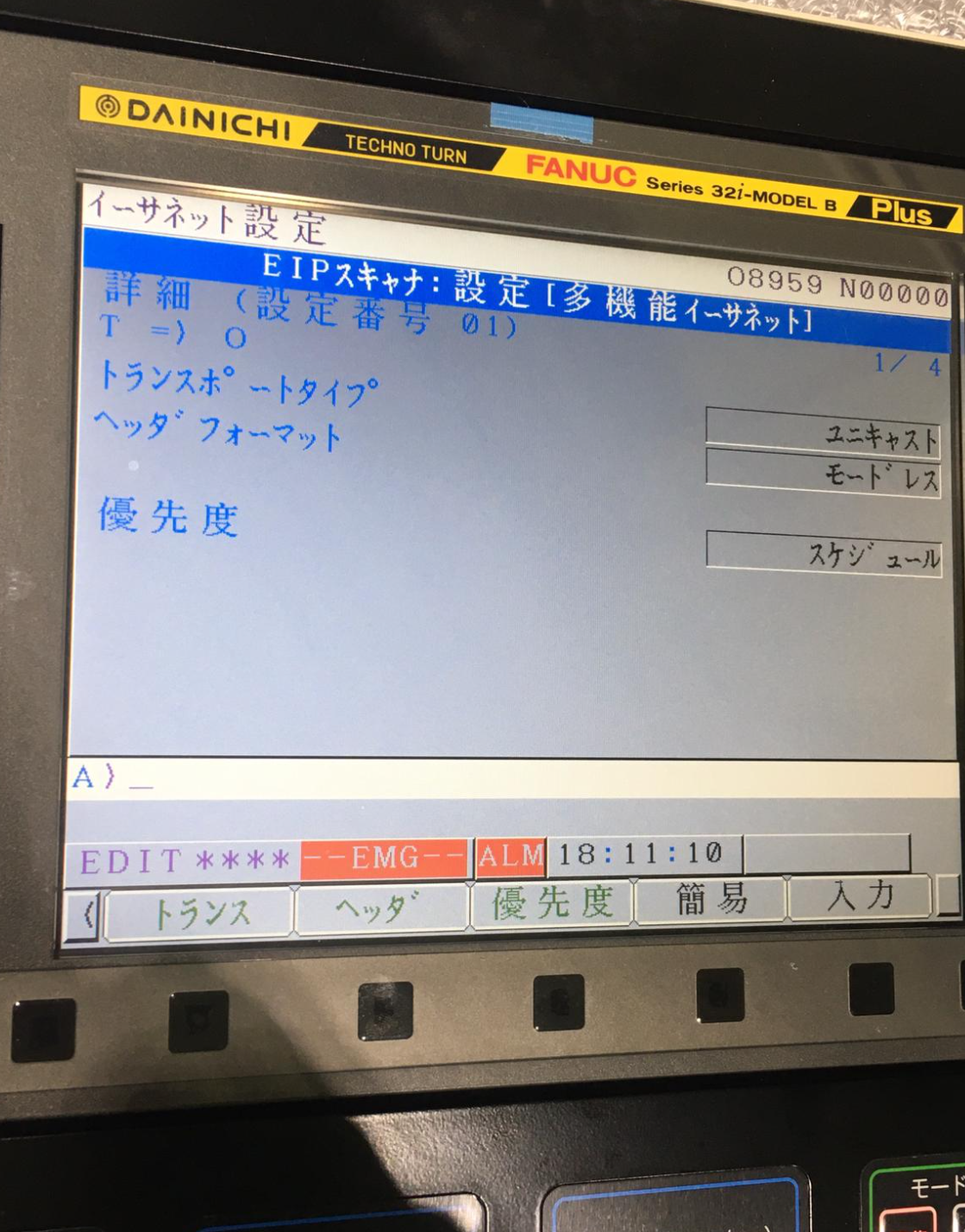
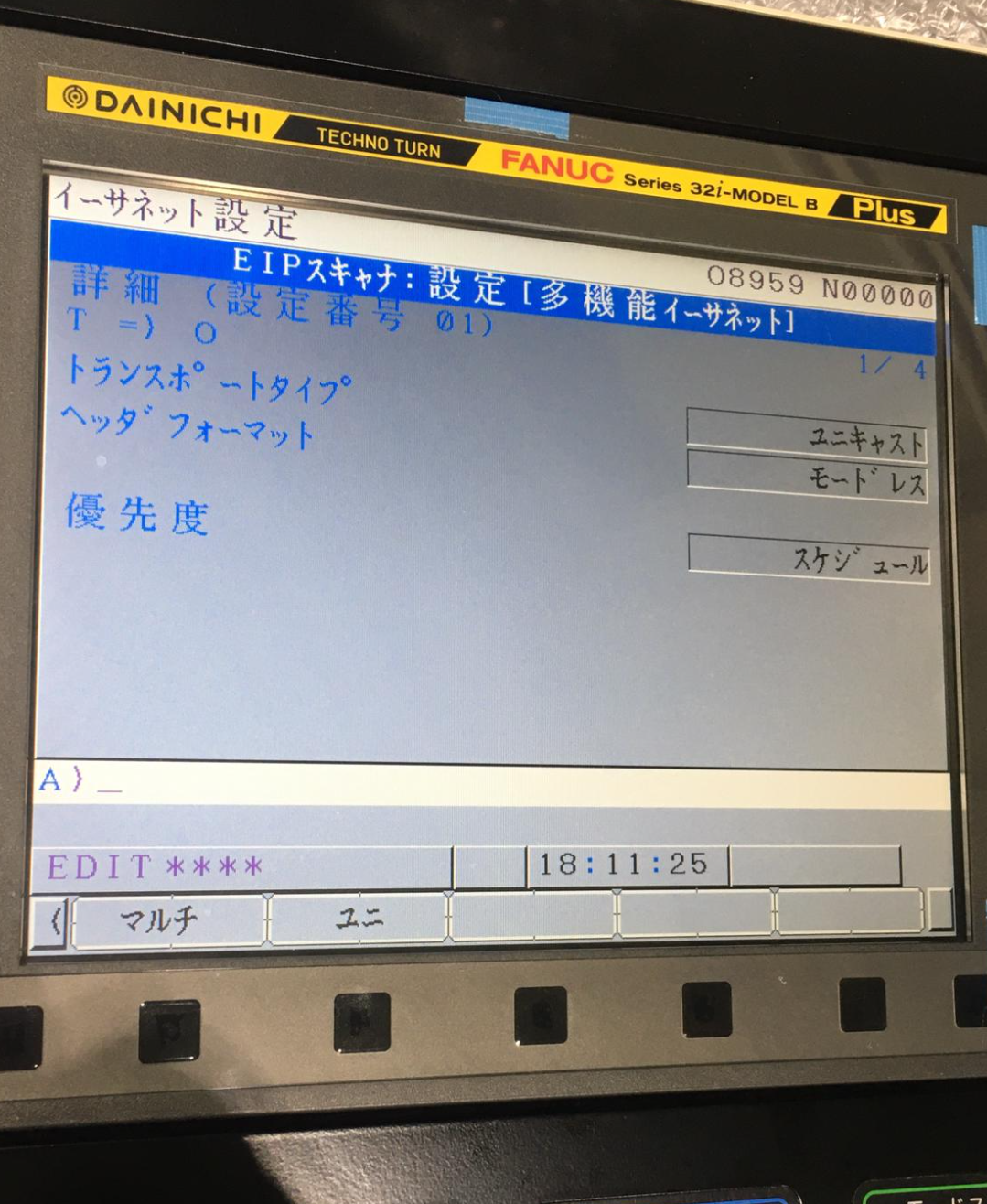
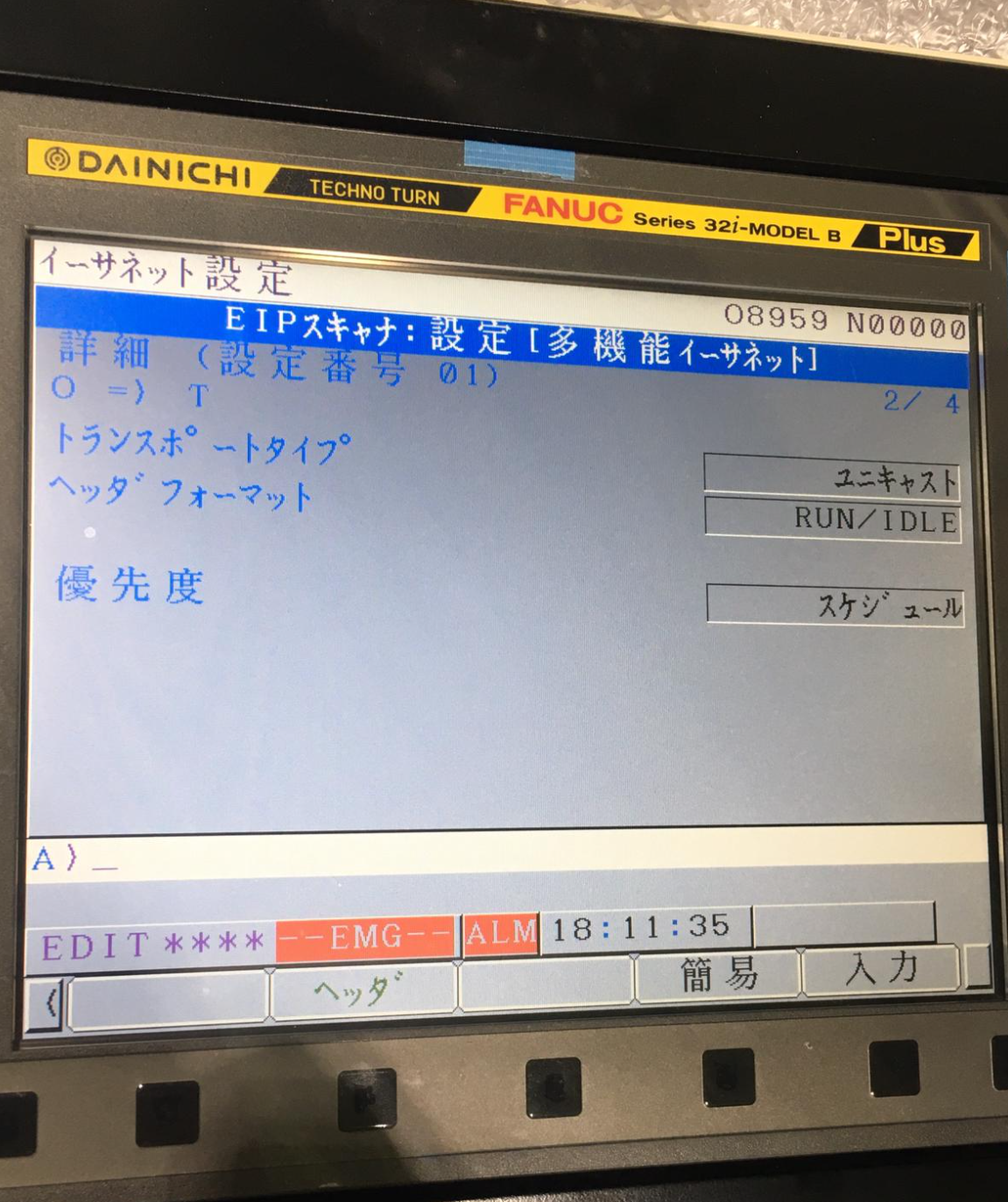
トランスポートタイプ
アプリケーションに合わせてユニキャストやマルチキャストを設定します。
ヘッダFormatも可能です。
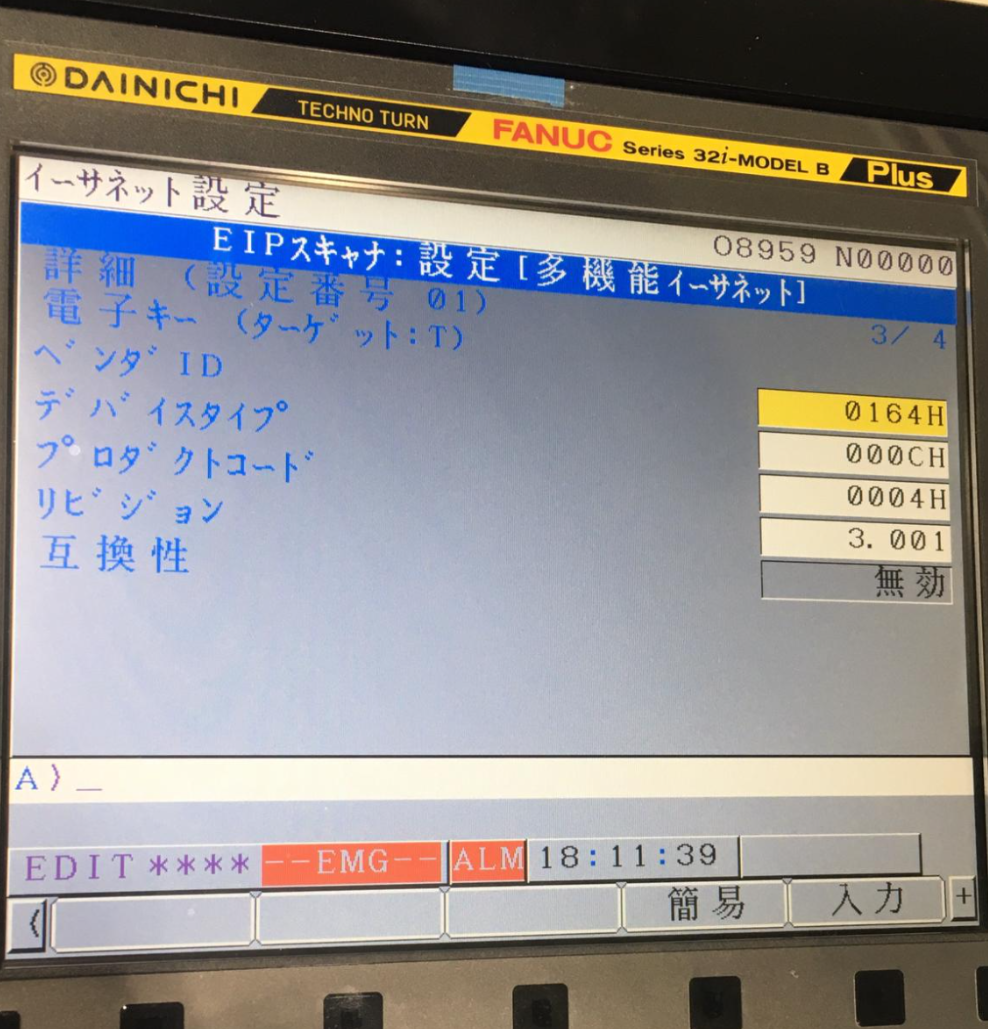
電子キー設定
EDS Fileに沿って設定しましょう。
タイムアウト設定
タイムアウト設定もネットワークの状態に合わせて設定しましょう。
Ethernet/IP 無効
Ethernet/IPのAdapterを一時的に使わない場合、そのConnectionを無効にするもできます。
操作をクリックします。
”状態”ボタンをクリックします。
そこで該当する接続を無効・有効することできます。
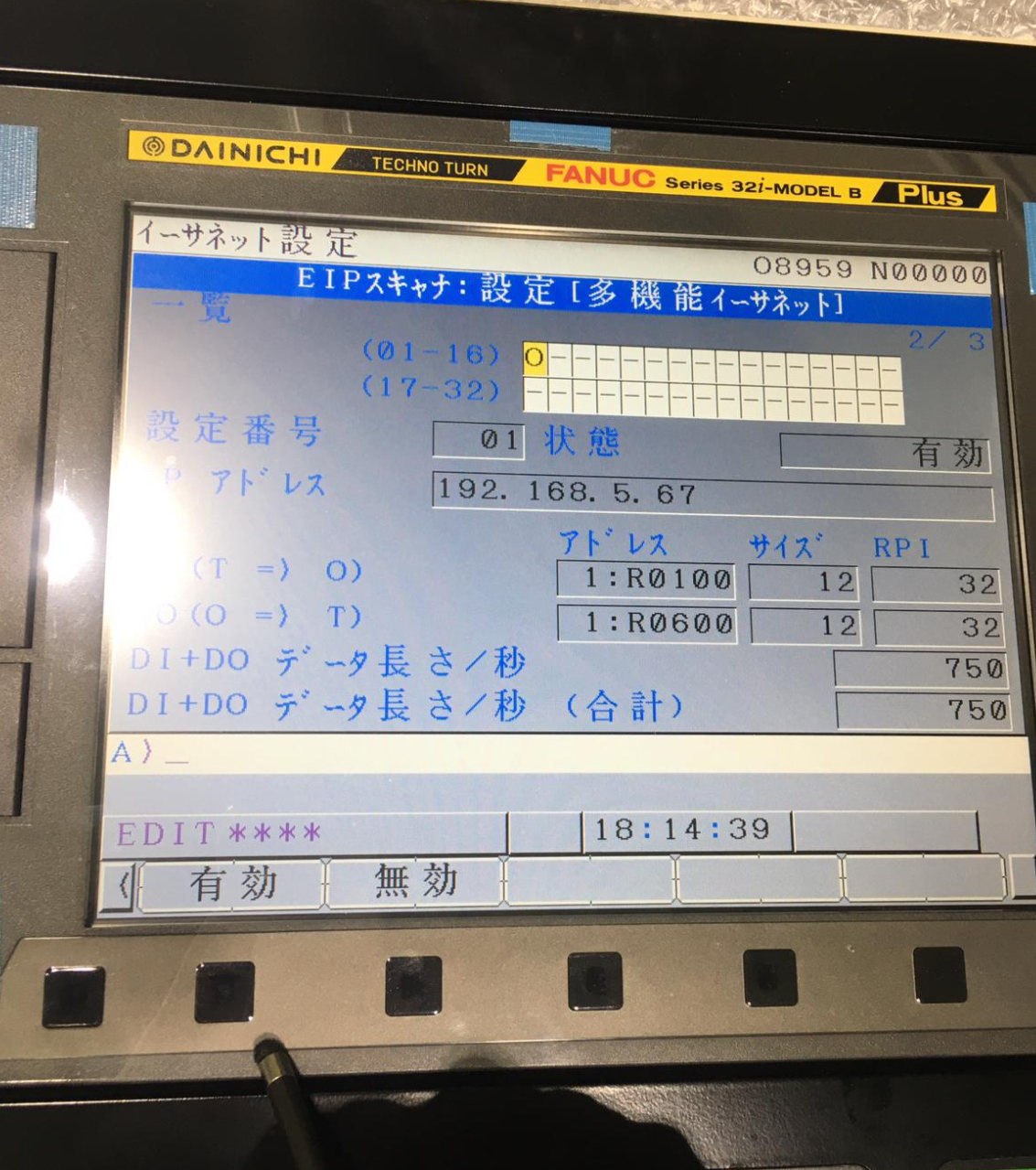
有効・無効
また、CNCのScanner自体の機能を無効・有効も可能です。
Result
もし設定されているConnectionに”O”が表示されている場合、その接続は正常(O=ok)です。
もしエラーが発生した場合、その接続は”E”(ERROR)に表示します。
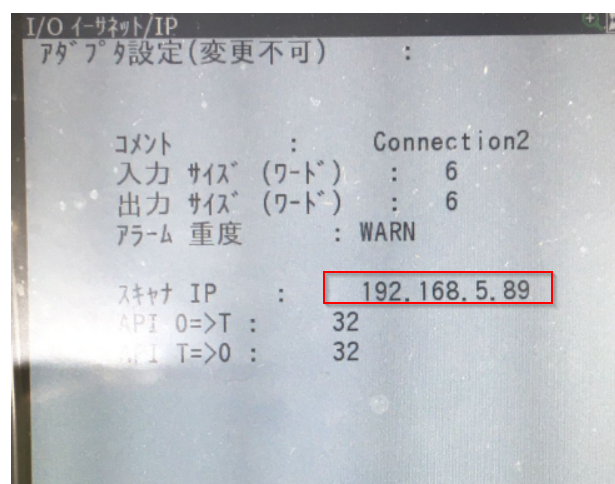
そしてRobot ControllerからもCNCのIP アドレスがアダプター設定で確認できます。