今回の記事では、Beckhoff TwinCAT3 と Delta 社のサーボシステムをEtherCAT で動かします。記事の中にInterface・Properties・Methods・Function Block・Extendsなどを組み合わせてライブプログラムします。また、TwinCATから簡単なScopeプロジェクトの作成方法も紹介します。
さ、FAを楽しもう。

Reference Video
Beckhoff.Delta ASDA-A3 サーボを動かしてみよう
Reference Link
Servo ASDA-A3?
今回使用するのはDelta社のASDA-A3シリーズのServoになります。

Layout
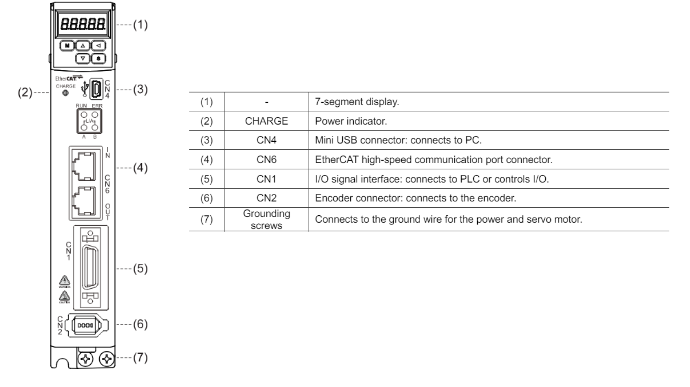
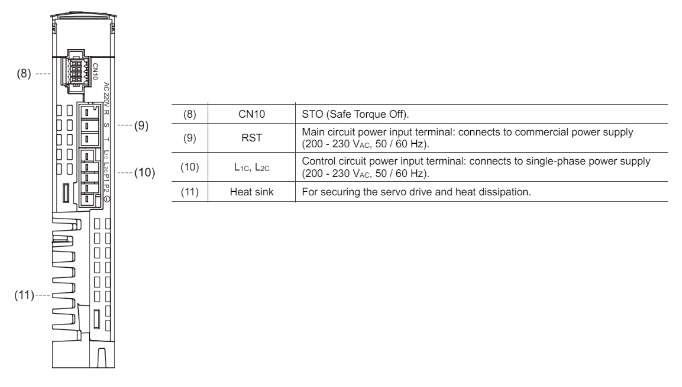
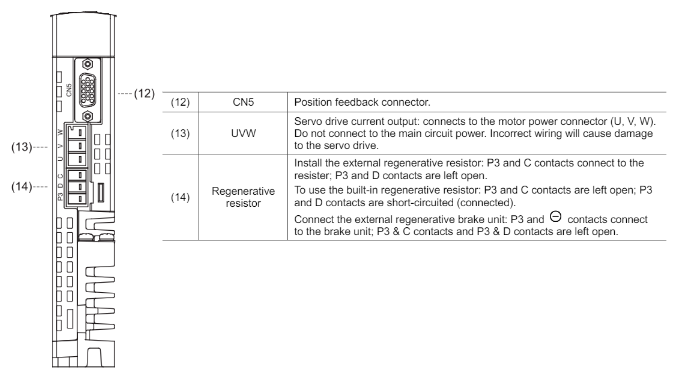
EtherCAT Mode
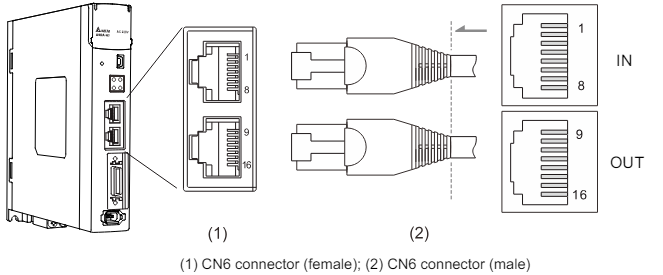
ASDA-A3サーボシステムではEtherCATモードを使用でき、2つのEtherCATコネクタ (CN6) のピン配置は同じです。
注意するのはIN コネクタは受信用としてコントローラ(マスタ)または前のサーボドライブに接続でき、 OUT コネクタは出力用として次のサーボドライブにのみ接続できます。また、接続を誤ると通信ができなくなります。
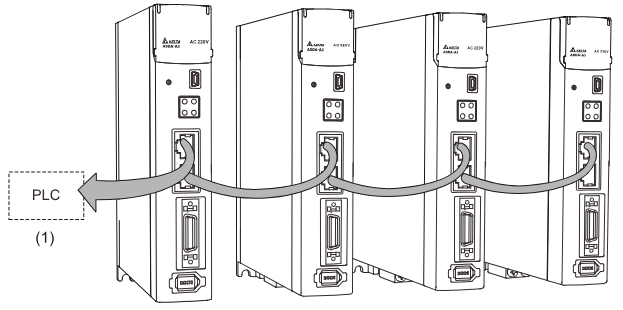
Connection Example
下図では複数のASDA-A3 サーボシステムをEtherCAT ネットワークの接続例です、
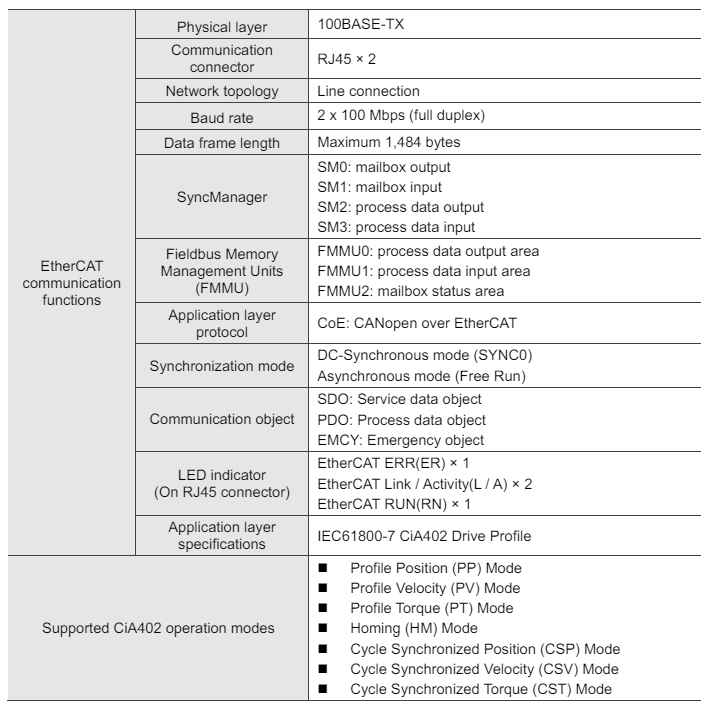
Specification
こちらはASDA-A3サーボシステムのEtherCAT仕様になります。
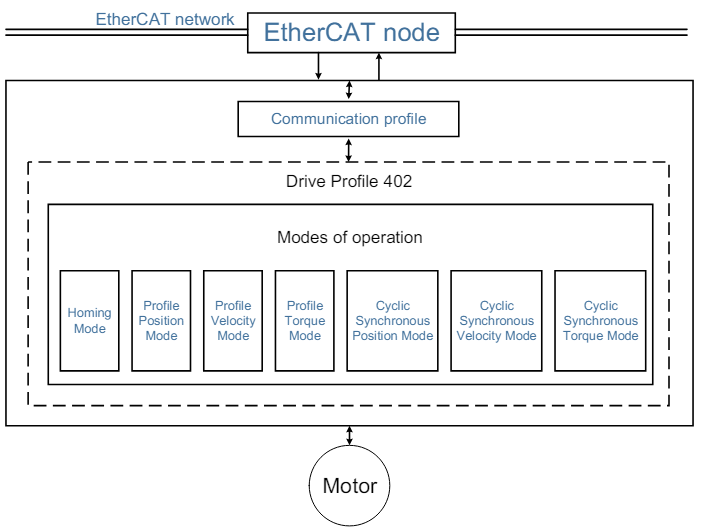
Architecture
サーボドライブのEtherCATアーキテクチャは以下の通りです:
- Communication profile: このプロトコルには、通信オブジェクト(PDO、SDO、SYNC、緊急オブジェクト)と関連するcommunication object dictionaryが含まれる。
- DS402:ドライブとモーションコントロール用のデバイスプロファイルで、各モーションモードの動作と、実行に必要なオブジェクトパラメータ設定を定義します。
Synchronous mode
Delta社サーボドライブは2つの同期モードをサポートしています: それはFree ModeとDC-Synchronous modeです。
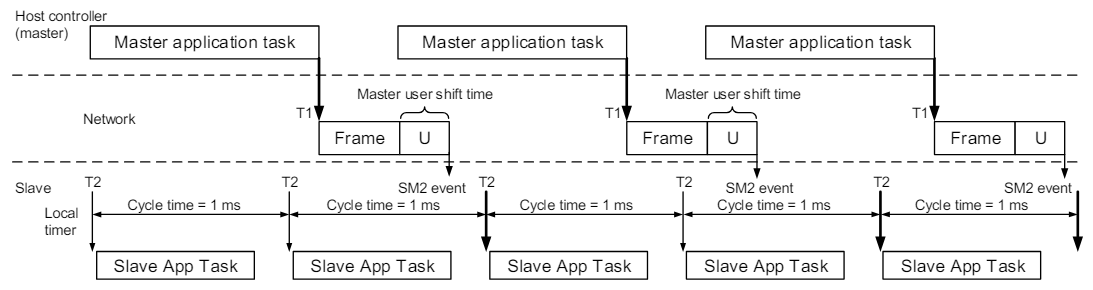
Free Run mode (Asynchronous)
Free Run modeでは、マスター局とスレーブ局は非同期で動作します。各ステーションは時間を計算する個別のクロックを持っており、マスターとスレーブのクロックは同期していません。マスターとスレーブ間のコマンドとフィードバックの送信は、正確な時間同期ではなく、シーケンシャルな順序に基づいている。例えば、マスターは時刻T1にPDOを送信し、スレーブはSM2イベント後のT2にPDOを受信する。
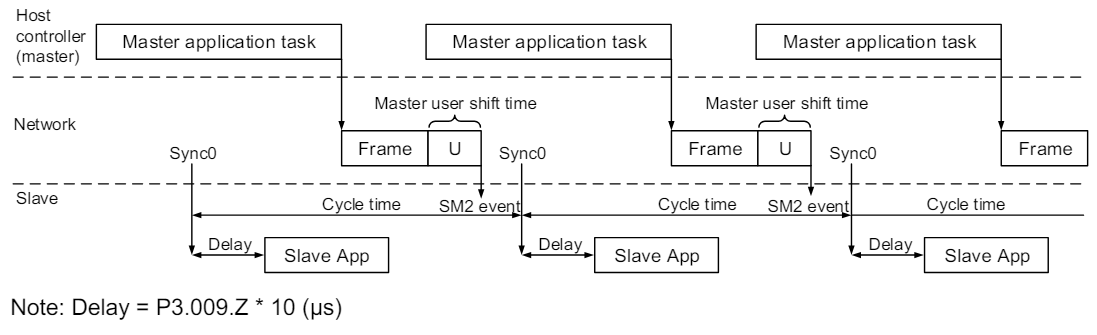
DC-Synchronous mode (SYNC0 synchronization)
マスタ局とスレーブ局の間には正確な時刻同期があり、マスターは制御プログラムを定期的に実行し、同期クロックに従って決まった時間にPDOパケットを送信するようになります。マスターはスレーブにコマンドを送信し、スレーブからのフィードバックを受信し、スレーブは同期クロックに従って一定時間ごとにPDOデータを受信し、更新するようになります。
PDO mapping configuration
PDOマッピング・オブジェクトは、object dictionaryの中にRxPDOはインデックスOD 1600からOD 1603まで、TxPDOはインデックスOD 1A00からOD 1A03まで割り当てられます。
RxPDOとTxPDOの各グループは、最大8セットの32ビットオブジェクトのPDOデータ更新をサポートできます。
Default PDO mapping configuration
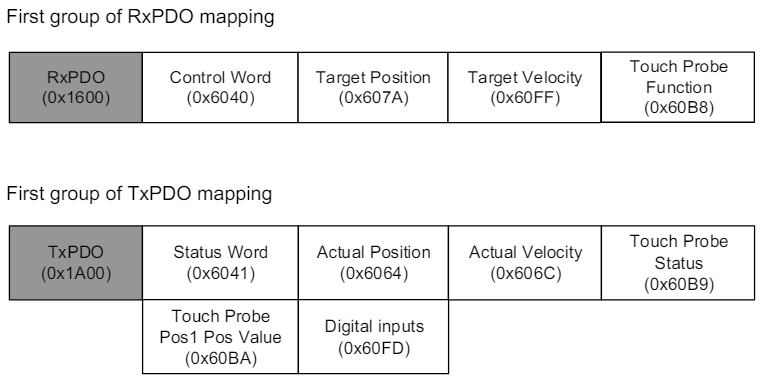
下表はデータ交換のためのEtherCATサーボドライブのデフォルトPDOマッピング設定です。これはEtherCATスレーブのXMLファイルでも定義され、要求に応じてPDOマッピング設定を変更することができます。
Delta ASDA-x3-E rev0.03.xmlでは、PDOコンフィギュレーションの第1グループから第4グループは以下のようになっています:
ASDA-Software Tools
Delta社のServoとCommissioningするために、下記のLinkでASDA-SoftをDownloadしましょう。
インストールEXEを起動し、Next>で進みます。
ツールのインストール場所を設定し、Installで進みます。
しばらく待ちます…
USB Driverのインストール画面が表示され、InstallをクリックしてServo Driveと通信するDriverをインストールしましょう。
Done!
Implementation1-Commissioning
ASDA-Softwareツールを起動しましょう。
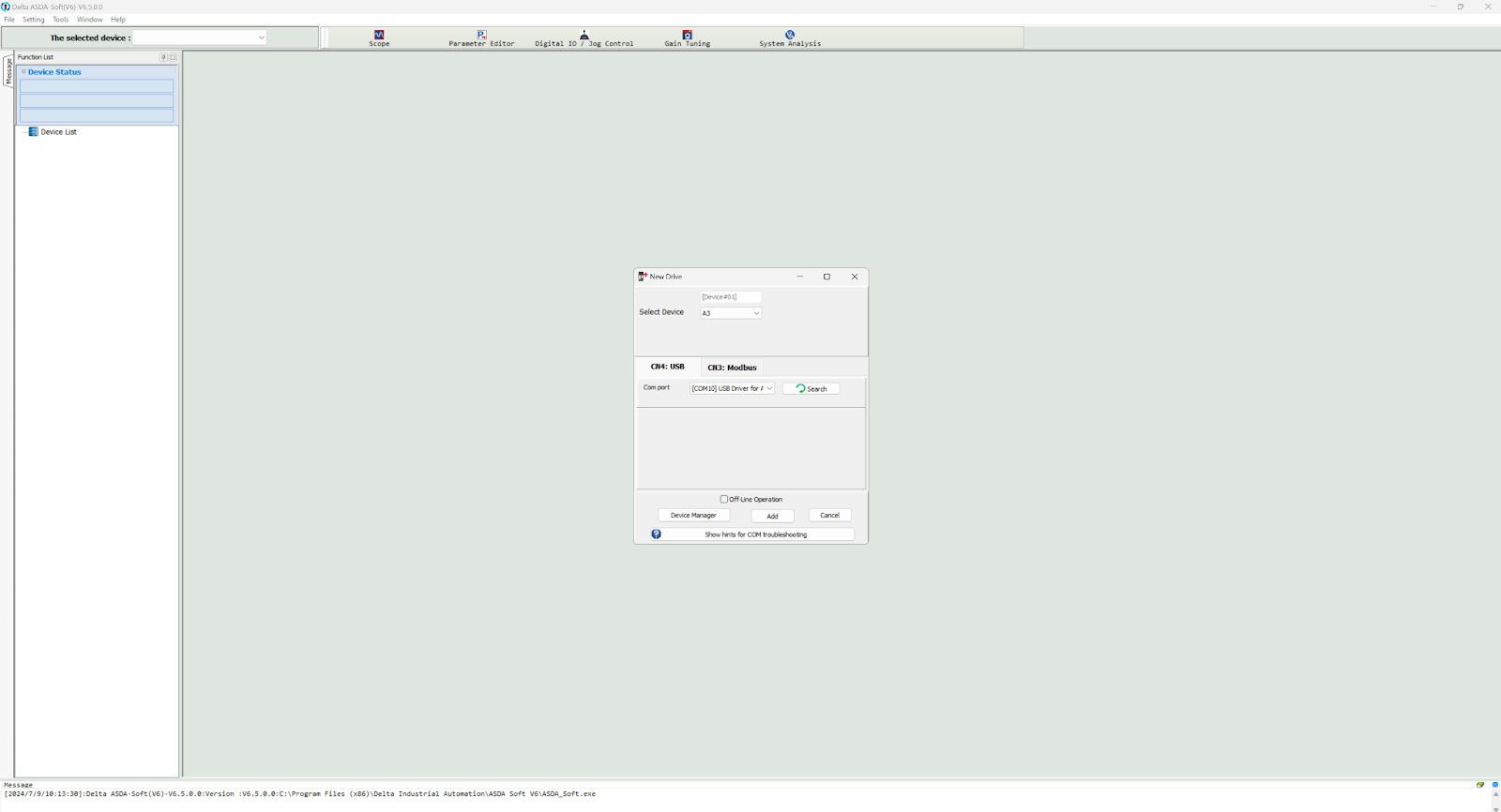
Connect to the Drive
Com portでPCとServoを接続するUSB Portを設定し、AddでServo Driveと繋がりましょう。
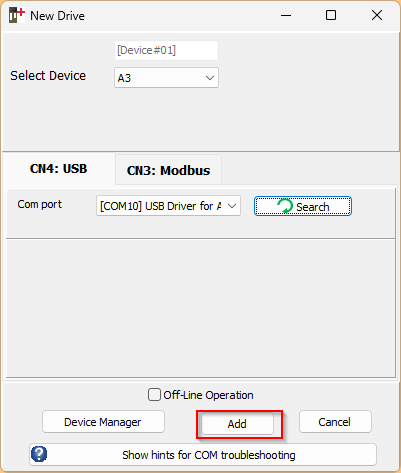
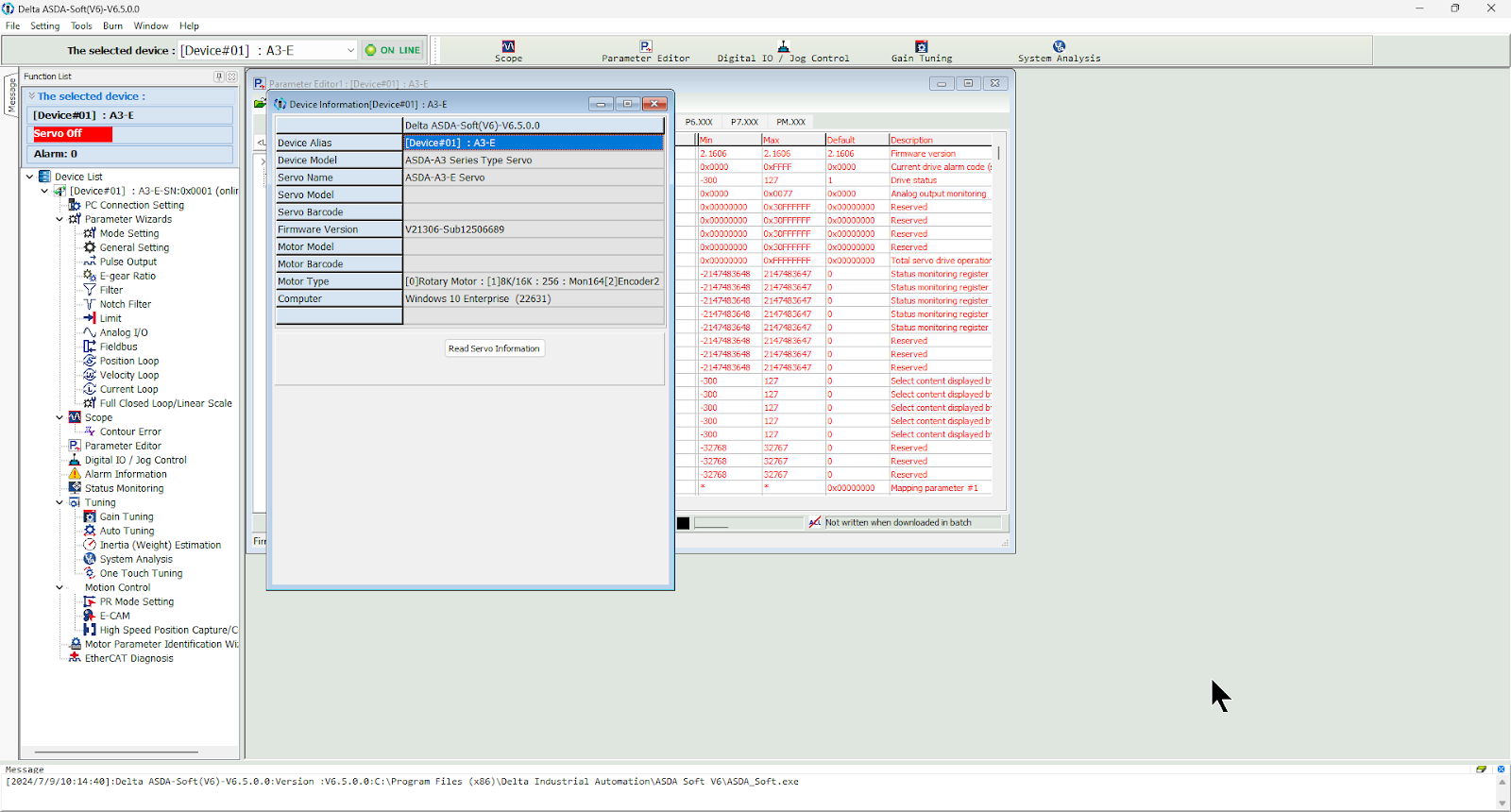
Done!
Panel Operation
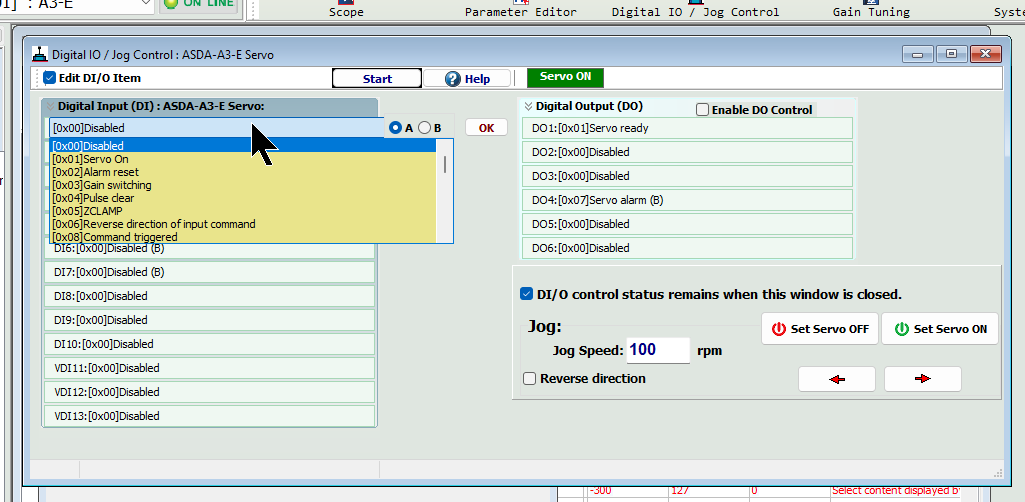
Digital IO/ Jog Controlをクリックします。
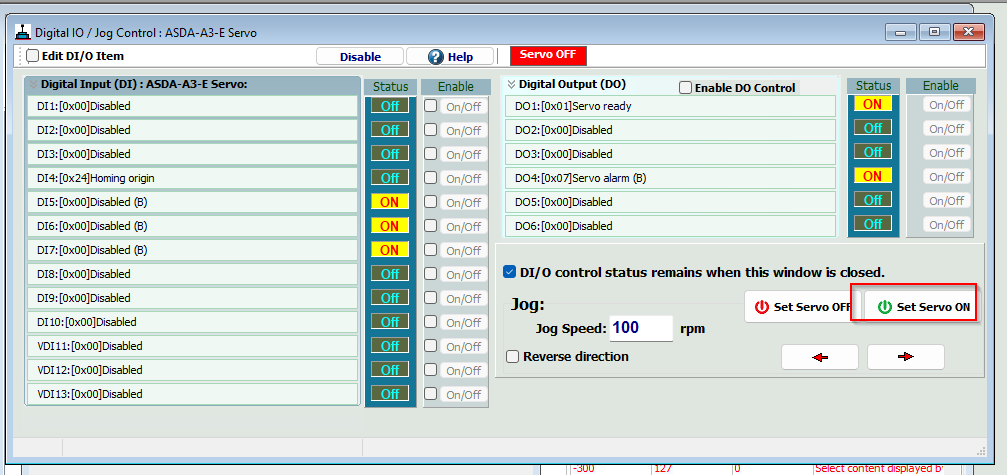
こちらはServoのDIO画面になります。
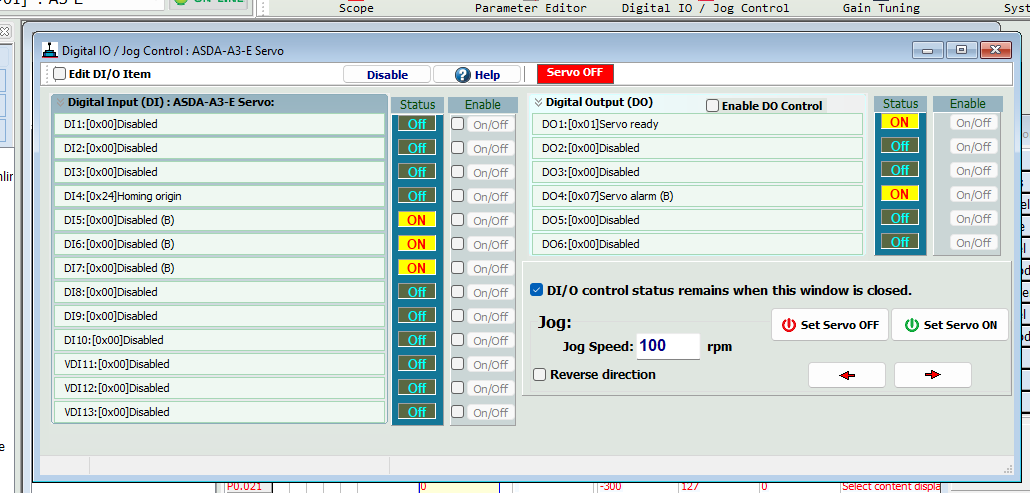
Set Servo ONをクリックしServo ONコマンドを発行できます。
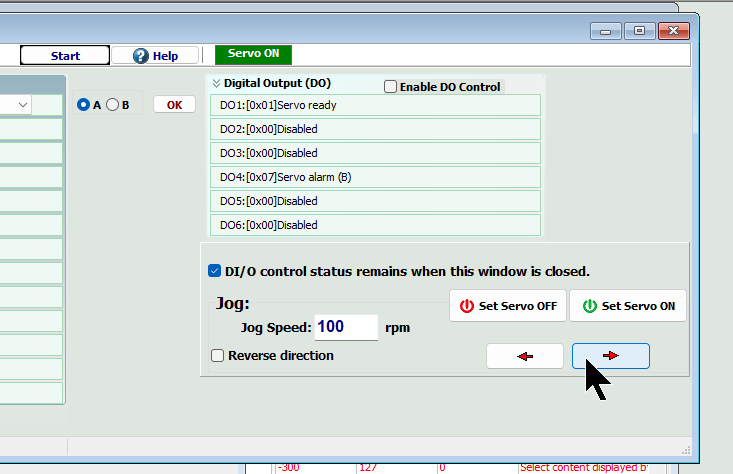
次は矢印を押したらServoのJOG操作が可能になります。
DIOの意味を変更したい場合は、Edit DI/O ItemのCheckBoxを入れてください。
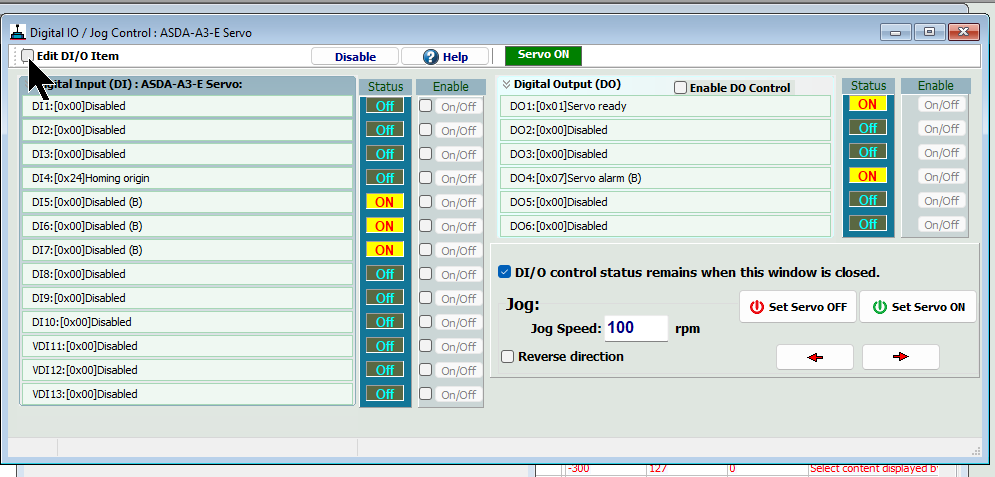
そうすると、各DIOにDrop-listから割り付けを変更できます。
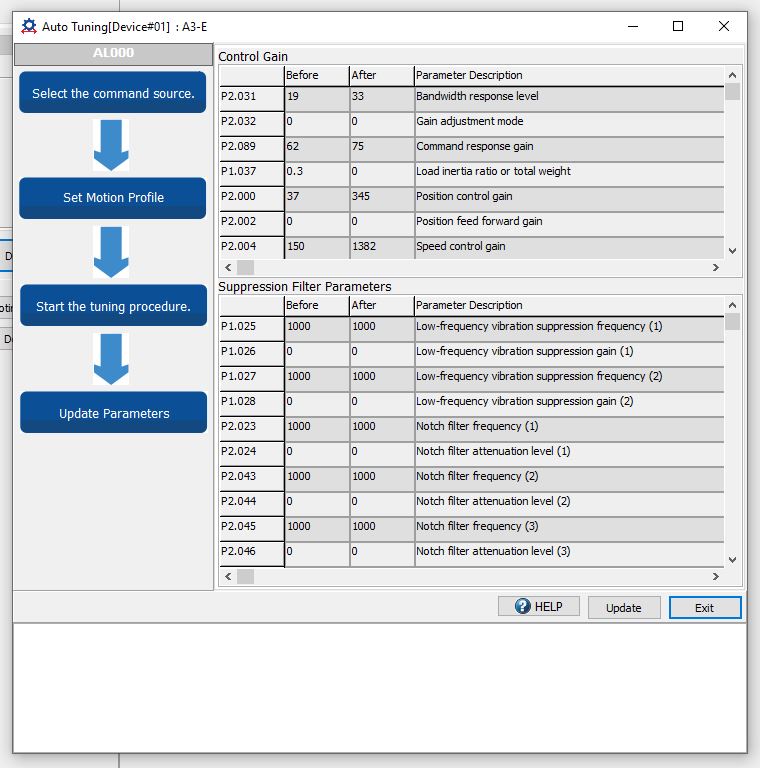
Auto Tuning
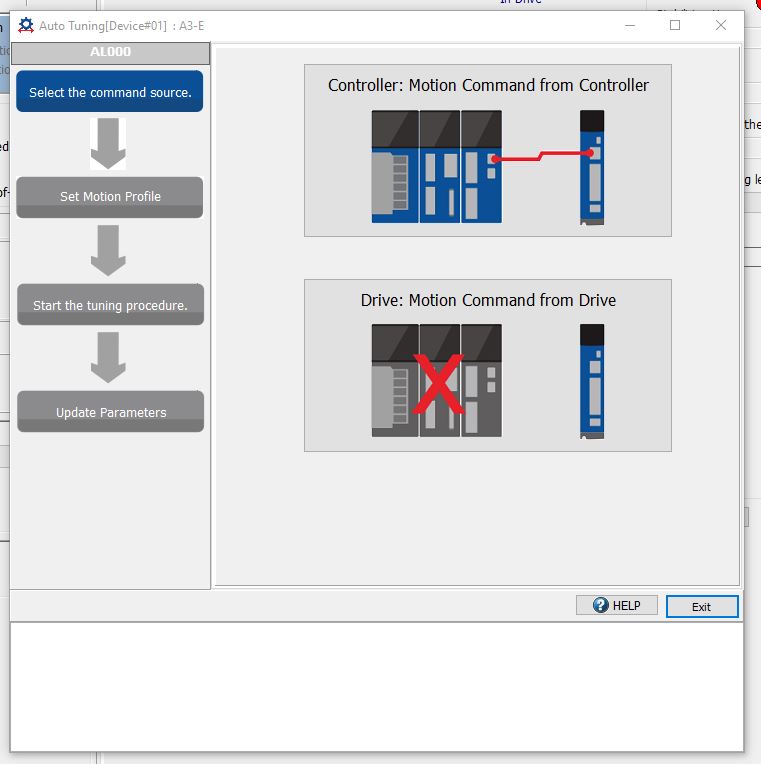
次はAuto Tuningをするため、Tuning>Auto Tuningをクリックします。
今回は単体でやりますので、Motion Command from Driveをクリックしましょう。
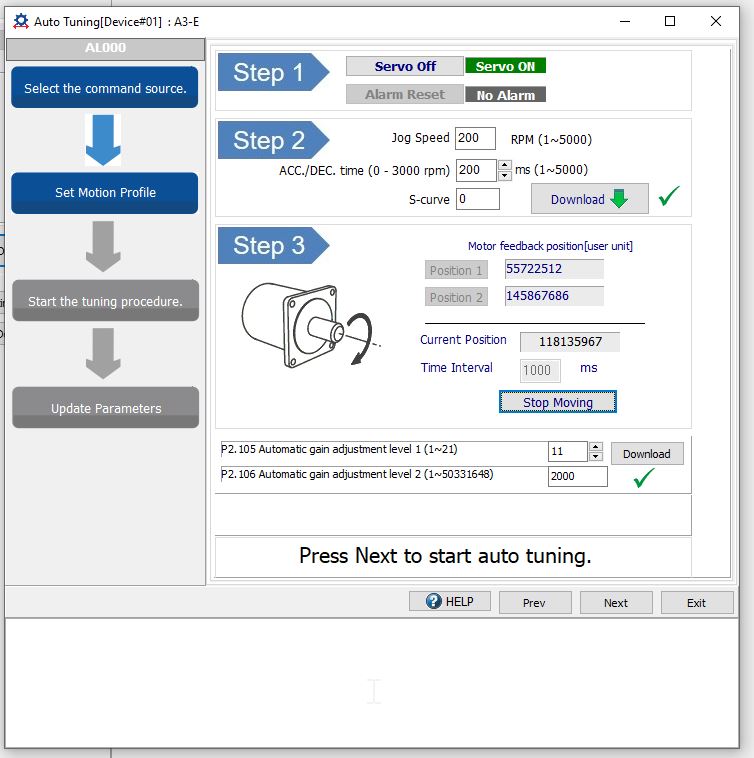
次はMotion Profile画面が表示されます。
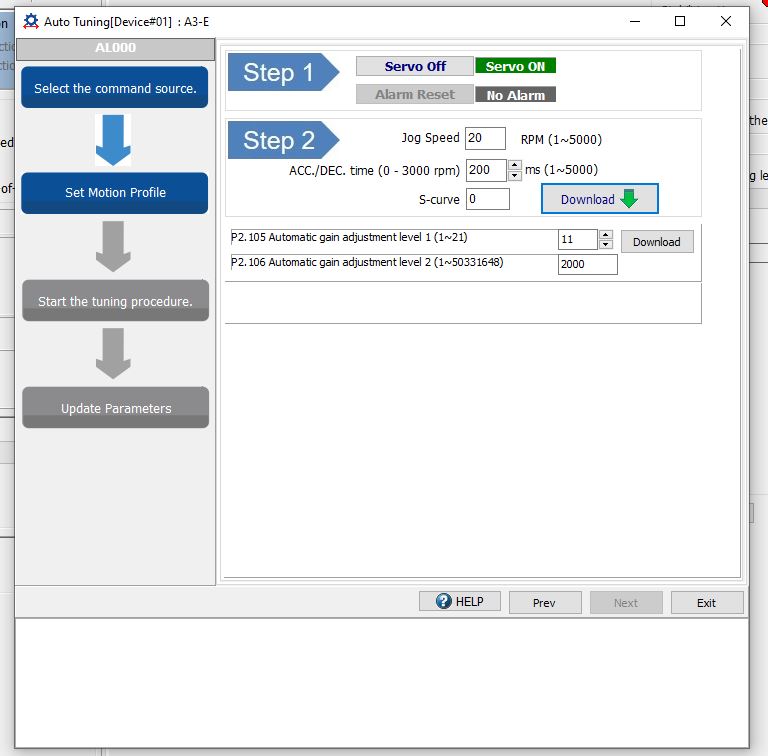
Servo ONし、Jog Speed・加減速度・そしてMotorを回しPosition1/Position2をクリックし、記録してください。最後はNextをクリックします。
Okで進みます。
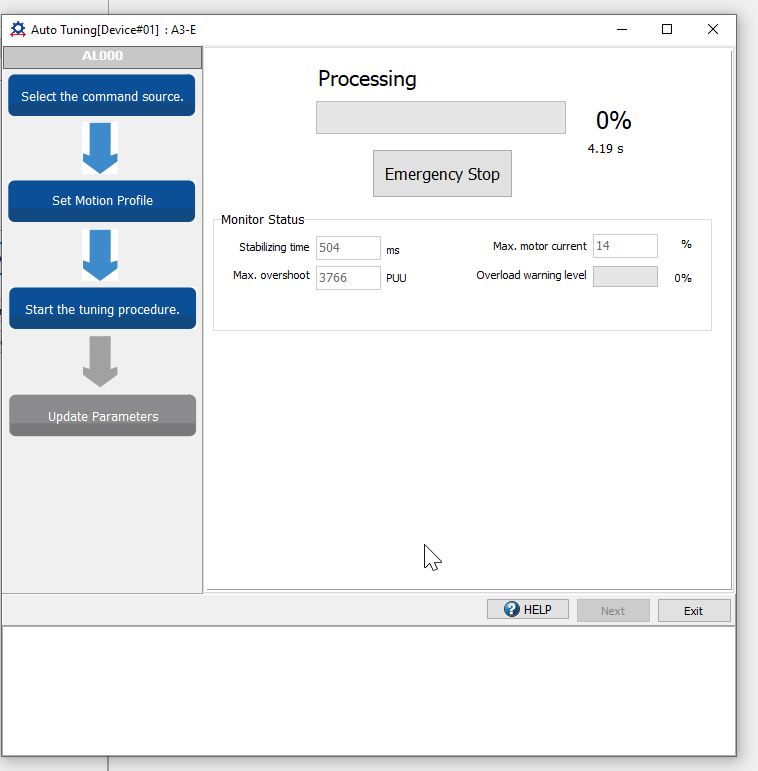
しばらく待ちます…
Done!
最後はUpdateボタンをクリックしパラメータを更新しましょう。
Implementation2
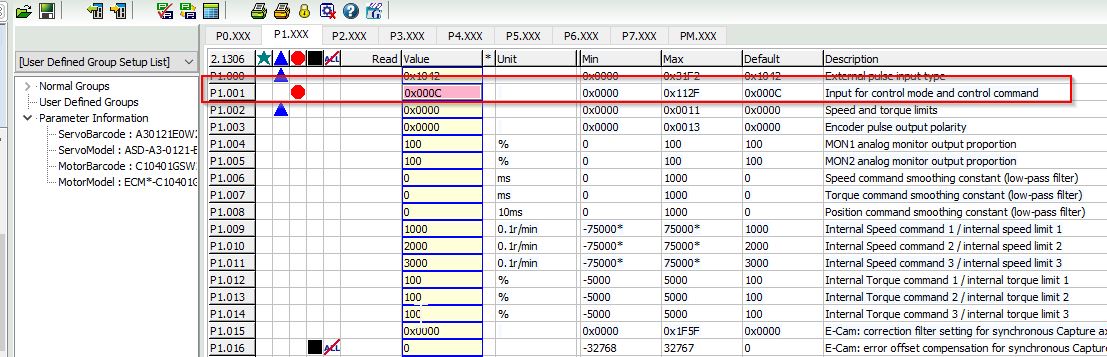
Delta Drive Side
パラメータでP1.001を0x000Cに設定してください。こちらはEtherCAT通信する設定になります。
TwinCAT Side
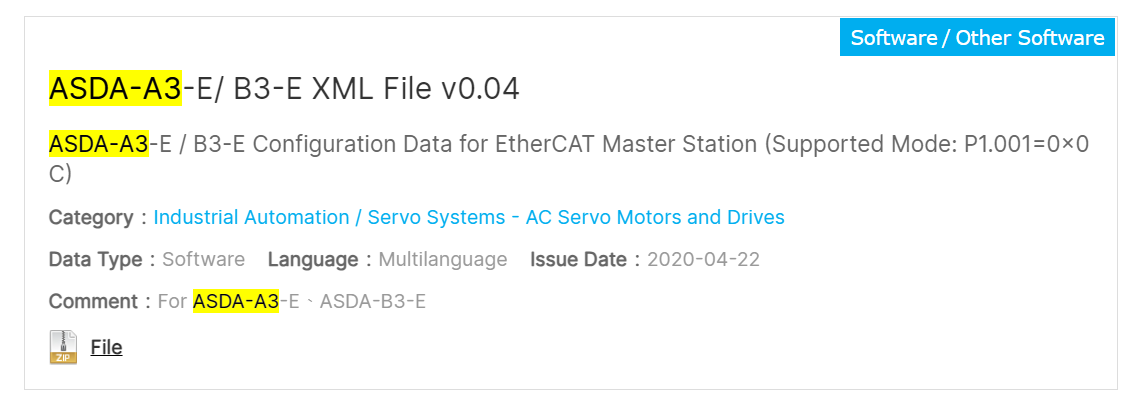
Download ESI File
下記のLinkからDelta者のESI FileをDownloadしてください。
Install the ESI File
先ほどDownloadしたESI File TwinCAT/3.1/Config/io/EtherCAT に格納しましょう。
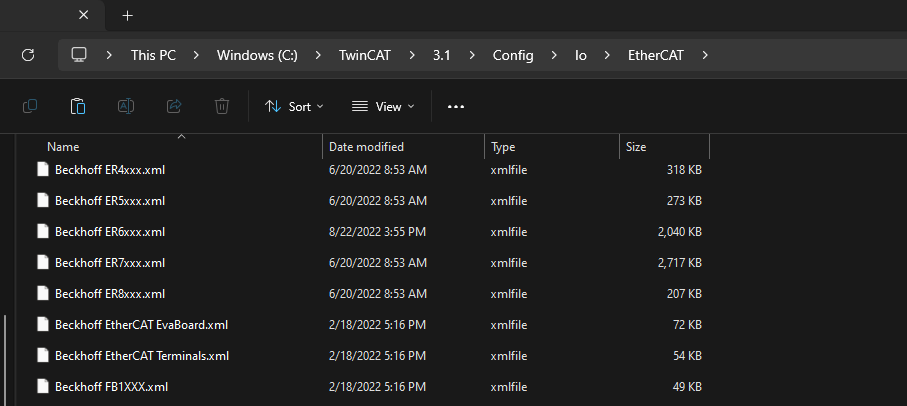
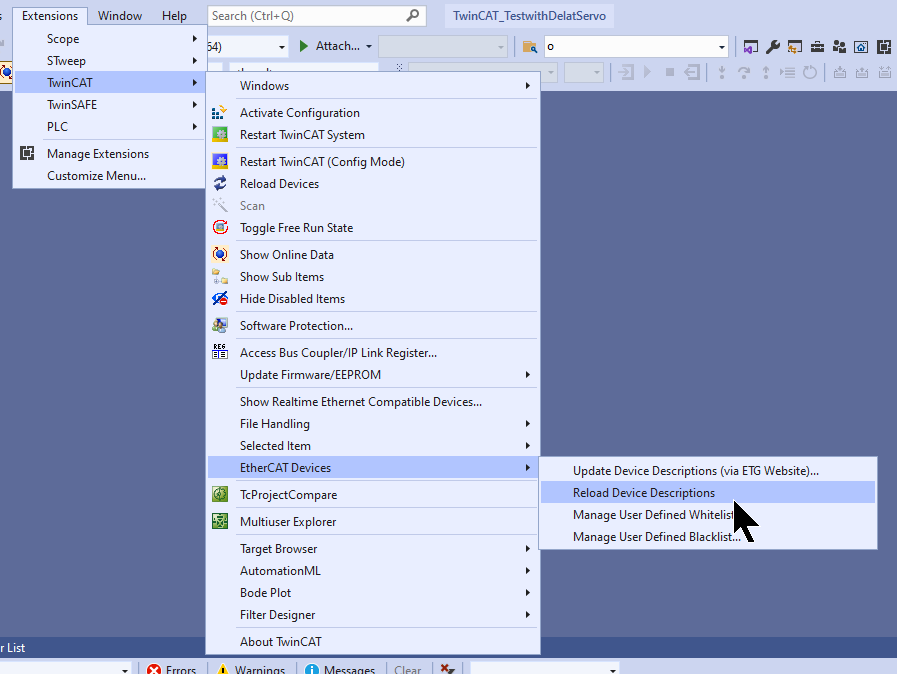
次はTwinCATを再起動するか、もしくはExtensions>TwinCAT Device>Reload Device Descriptionをクリックし、ESI Fileを再ロードしましょう。
Connect to TwinCAT Runtime
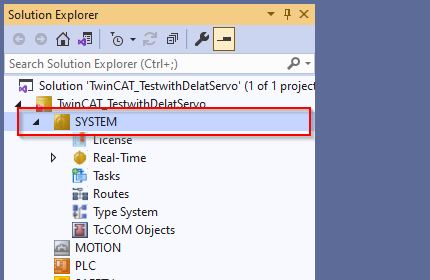
もしTwinCAT Runtimeがローカルではない場合、接続先を設定する必要があり、SYSTEMを開きます。
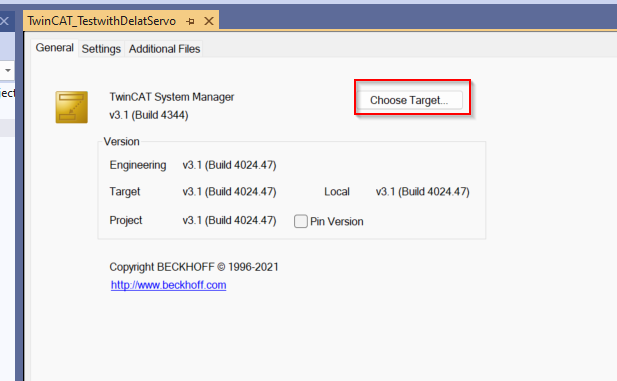
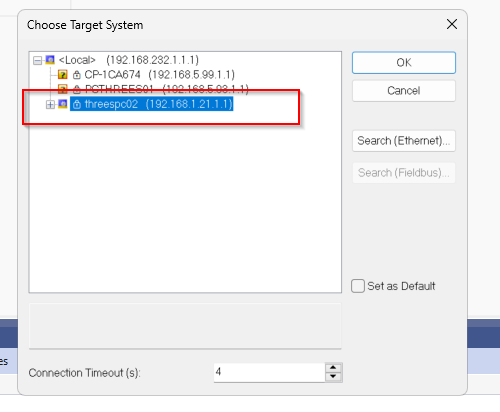
Choose Targetをクリックします。
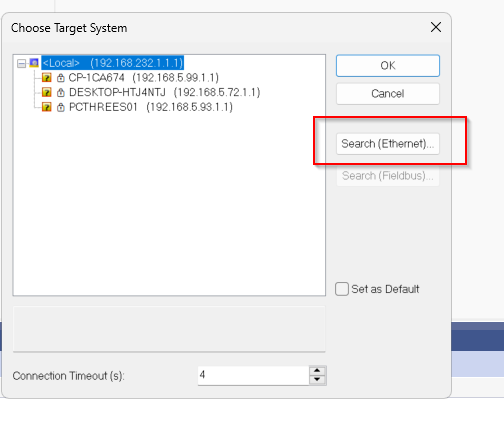
Search(Ethernet)をクリックします。
Route Dialog画面が表示され、TwinCAT RuntimeがインストールされているPCのIPを入力しましょう。そしてPCと接続したいRuntimeを選択します。
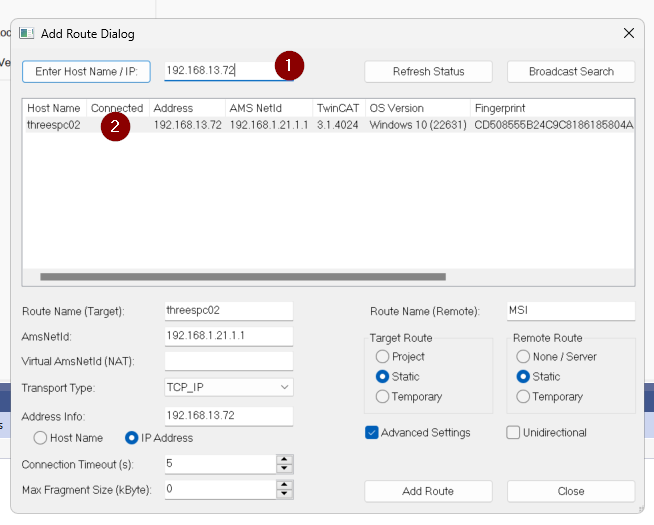
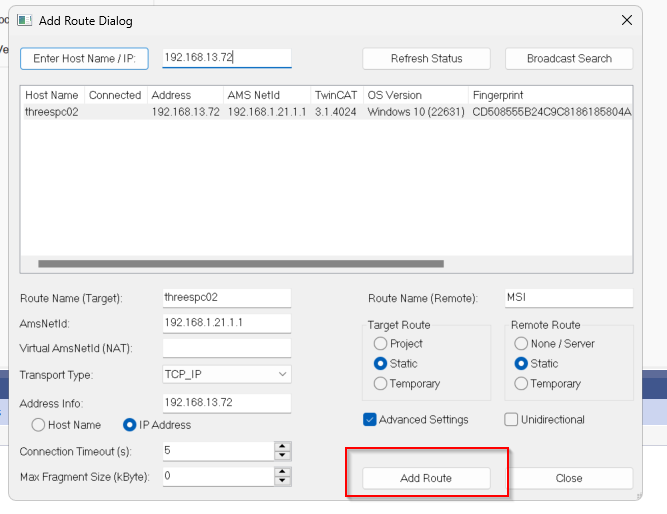
Add Routeをクリックします。
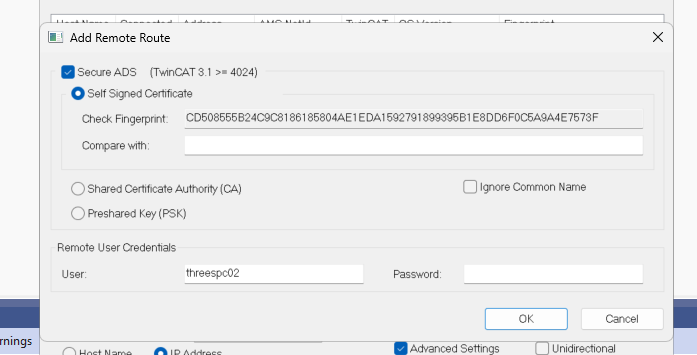
PCのUser NameとPasswowrdを入力し、OKで進みます。
Done!
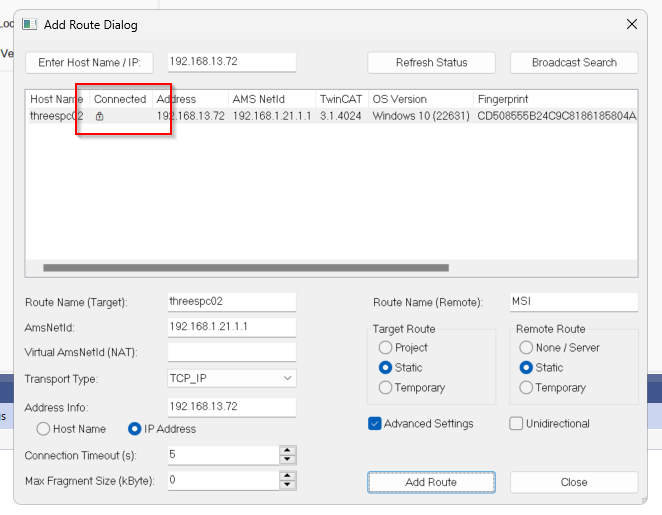
現在別のPCのTwinCATの状態も確認できるようになりました。
Configure EtherCAT Master
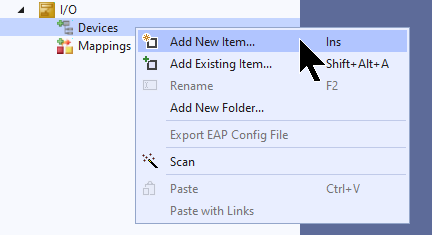
EtherCAT Masterを追加するた、I/O>Devices>Add New Itemします。
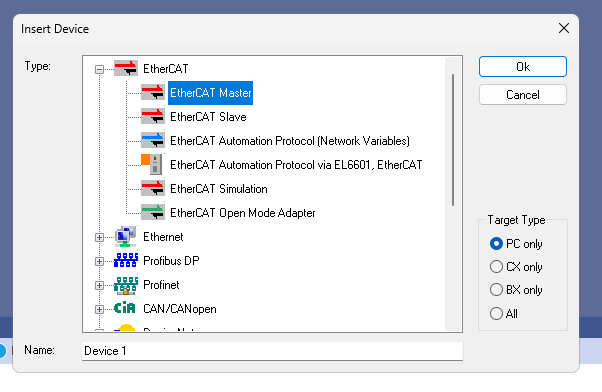
EtherCAT>EtherCAT Masterを選び、Okで進みます。
こちらはEtherCAT Maseterとして使用したいEthernet Adapterを設定する画面ですが、一旦Noneを選択し、Okで進みます。
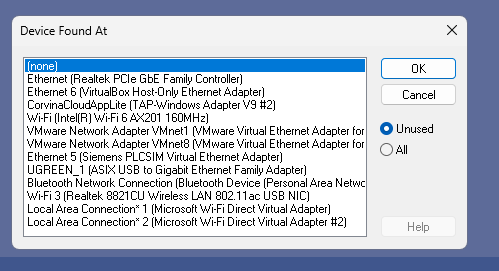
Done!EtherCAT Masterが追加されました。
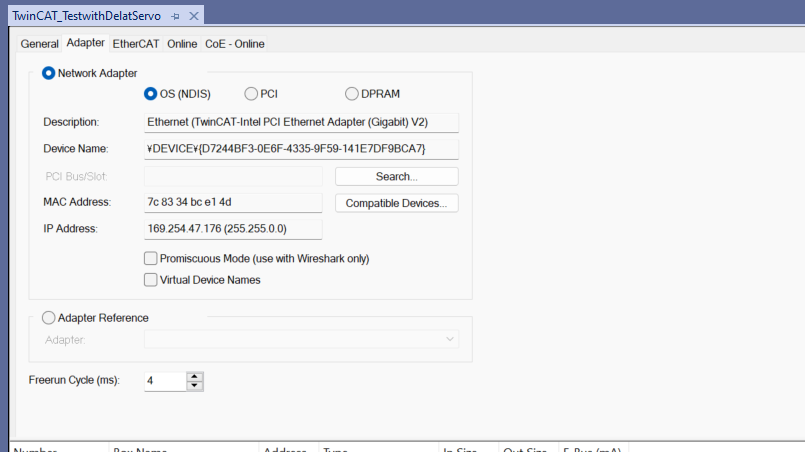
Configure the PCI Bus/Slot
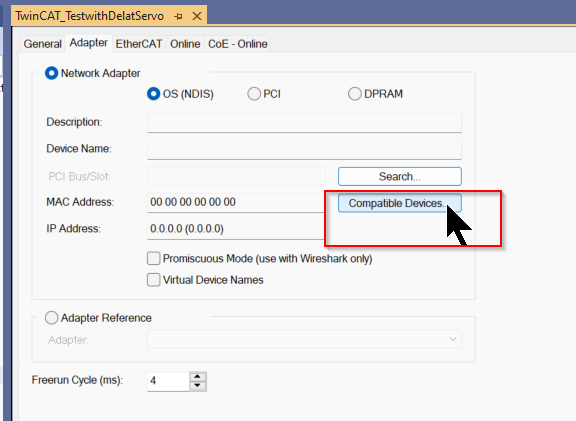
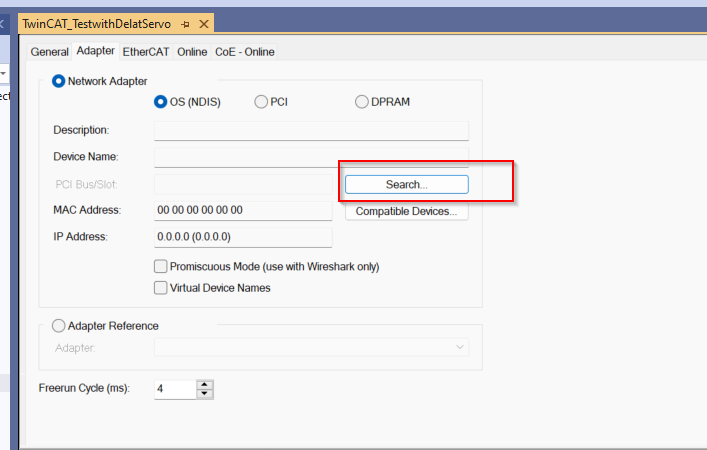
次はEthernet Adapterを設定するため、Compatible Devicesをクリックします。
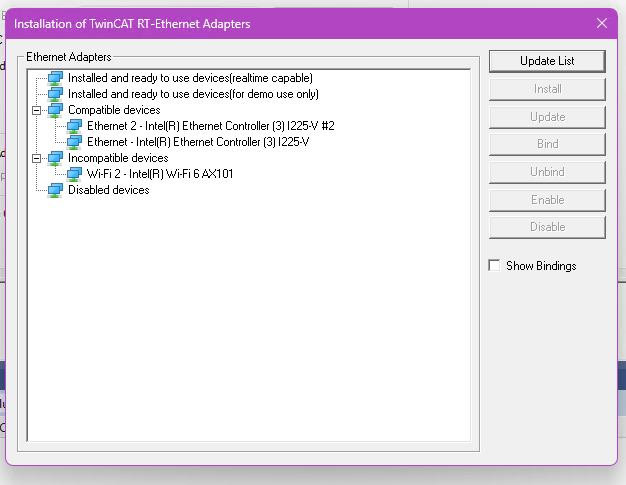
もし該当するTwinCAT XAEに下図のような画面が表示されれば、TwinCAT RT-ET Ethernet Adaptersをインストールする必要があります。
EtherCAT Masterとして使用したいEthernet Adapterを選び>Installをクリックします。
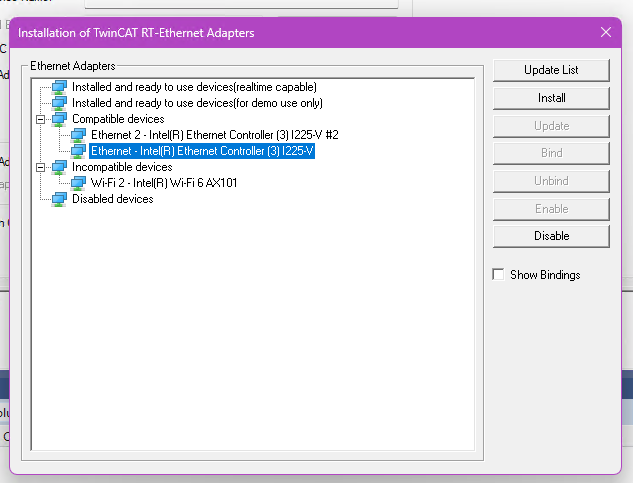
Installで進みます。
Done!
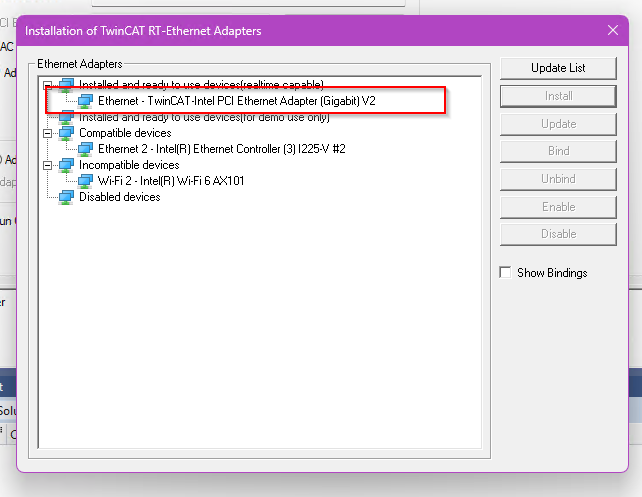
次はSearchボタンをクリックします。
先程インストールしたEthernet RT Driverを使えるようになりました!
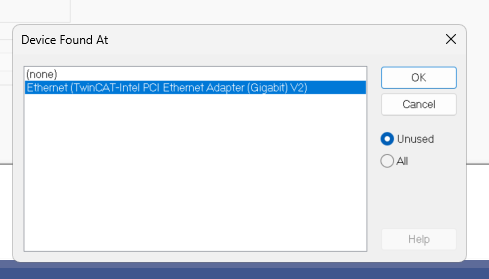
Done!
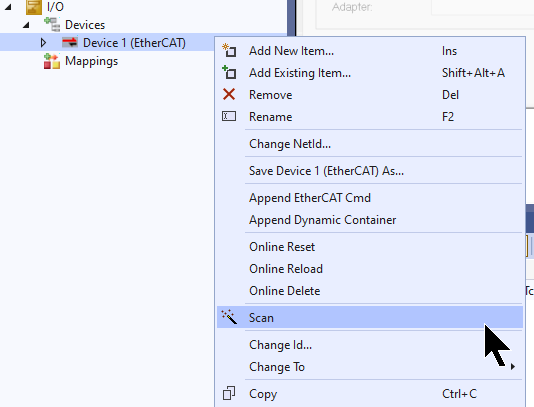
Scan Network
TwinCATのAuto Scan機能を使用し、ネットワーク内のEtherCAT Slaveを検索します。
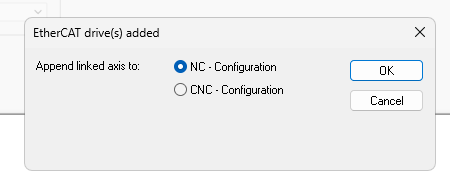
DeltaのServoが検出され、該当する軸をNC軸にするかCNC軸にするかを選択できます。
今回はNC-Configurationを選択し、Okで進みます。
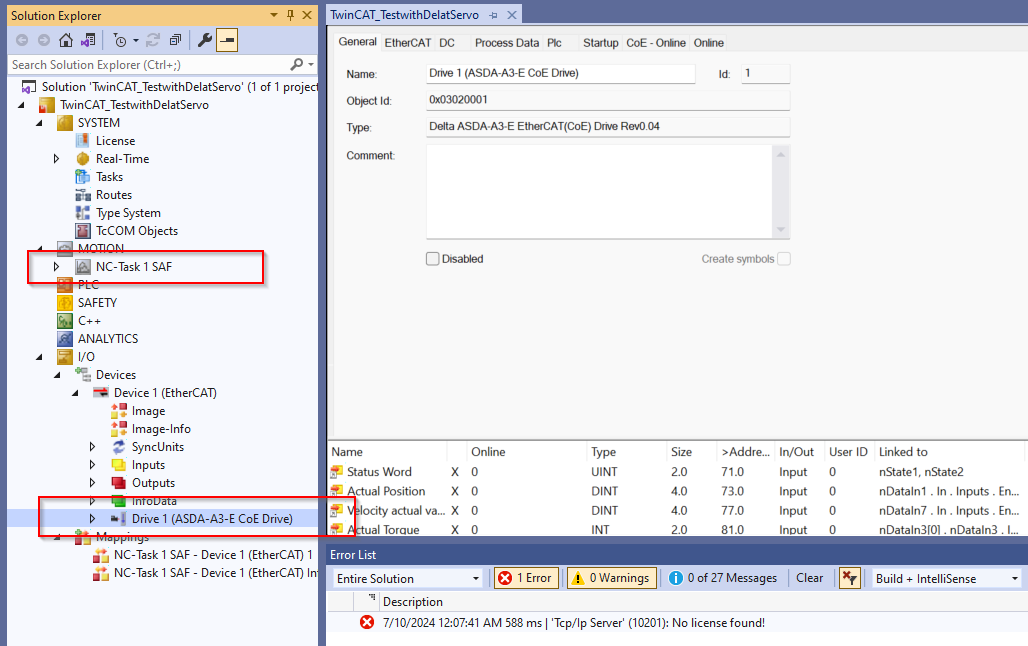
Done!Delta者のServo DriveとNC 軸にも追加されました。
Activate Configuration
次はActive Configurationをクリックし、一回プロジェクトをRuntimeにDownloadします。
OKで進みます。
Enc Setting
次はEnc 設定画面でScaling Factorを設定します。
- Numerator:100
- Denominator: 16777216
Delta社の取説にも書きましたが、ASDA-A3の分解能は24ビットで、モーター1回転あたり16,777,216パルスを生成します。エンコーダの分解能(17ビット、20ビット、22ビット)に関係なく、Eギア比はASDA-A3サーボドライブの24ビット分解能に従って設定されます。また、E-Gearの比率というパラメーターがあり、その設定が1の場合、モーター1回転につき16,777,216パルスを発生させます。
つまり、現在16777216パルスあたりに(1回転)で、BeckhoffのNC Driveが100mmとして認識します。

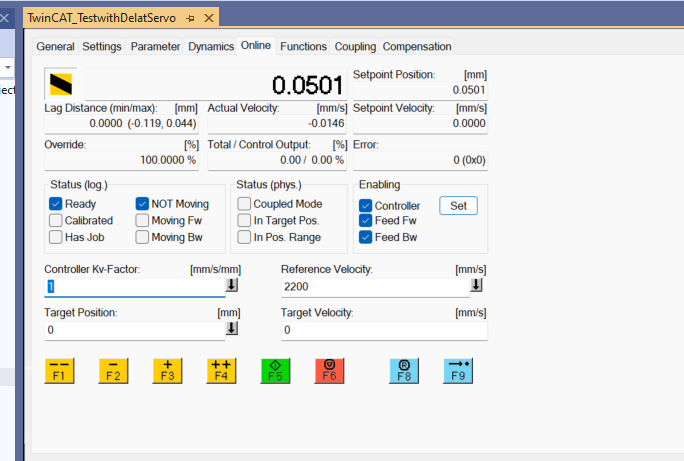
Commissioning with Panel
最後はAxis>Axis 1 >Onlineで直接Servo Driveを操作してみます。
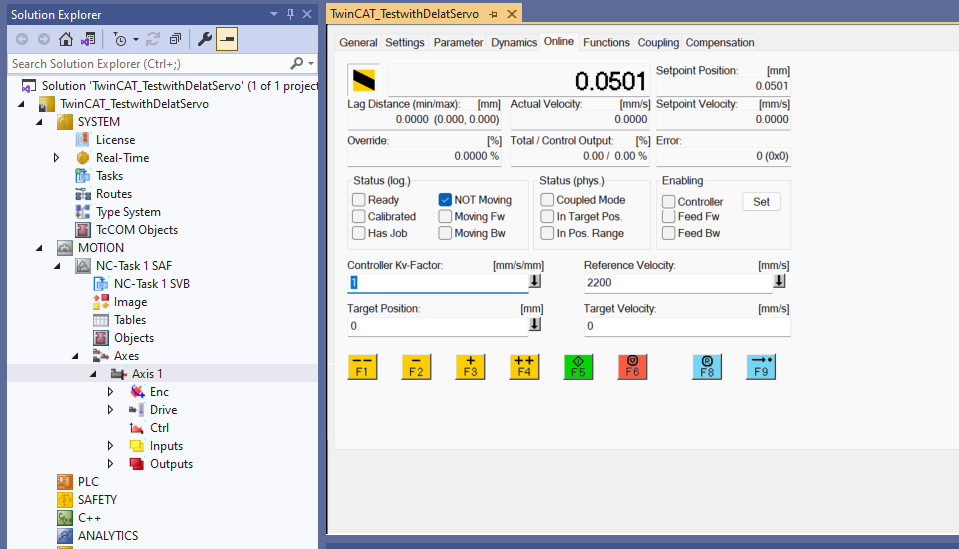
Set をクリックします。
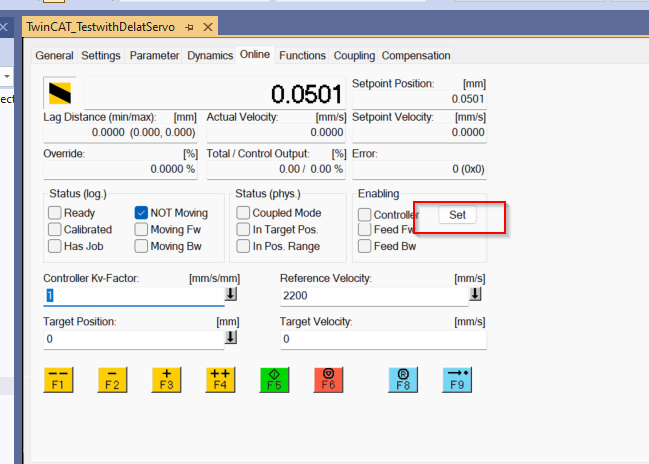
Allを選択し>Okで確認します。
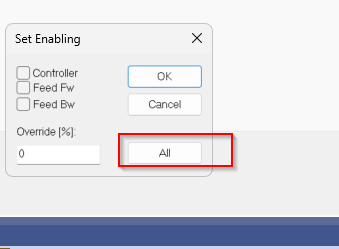
Done!現在はServoONになりました。F1/F2/F3/F4などでJog操作やFunction Tabから位置決め操作を試してください!
Implementation3
今度はTwinCATのPLCプログラムからServoを制御します。
Beckhoff Side
Add PLC Project
PLC>右クリック>Add New ItemでPLCプロジェクトを追加します。
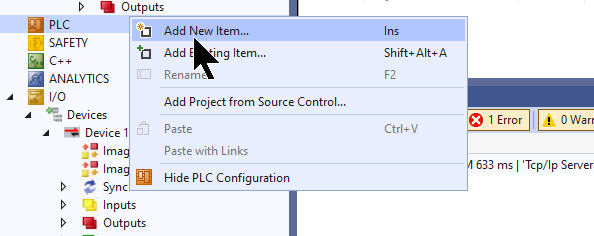
Standard PLC Projectを選び>Addでプロジェクトを追加しましょう。
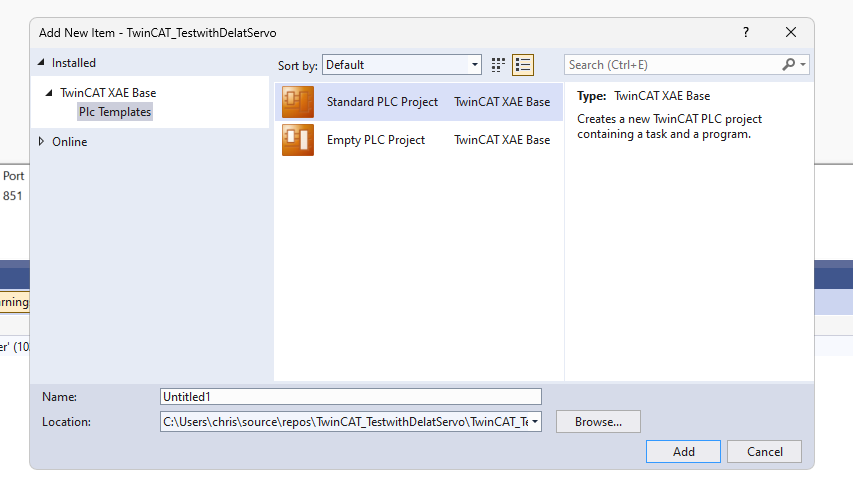
Done!PLCプロジェクトが追加されました。
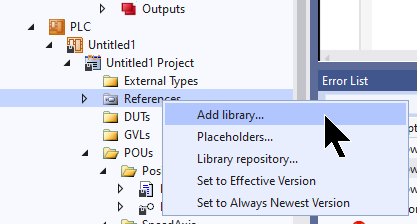
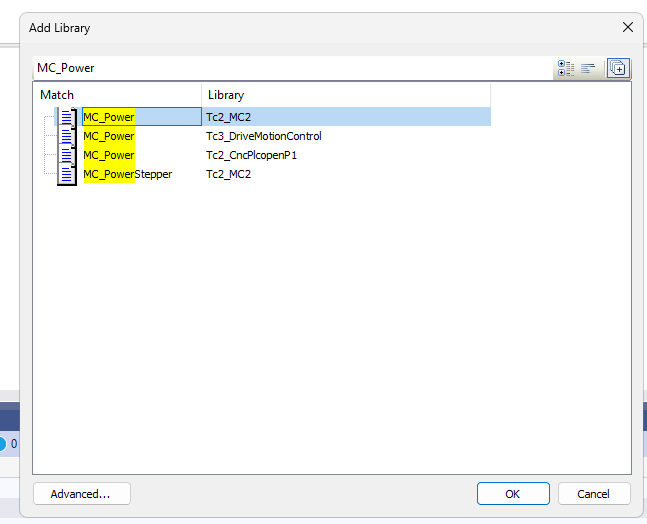
Add Library
次はMotion制御のライブラリTc2_MC2を追加するため、References>Add libraryします。
Configure Home Method
Delta Servo Driveを選択>Startup>右クリック>Add New Itemで初期パラメーターを設定します。
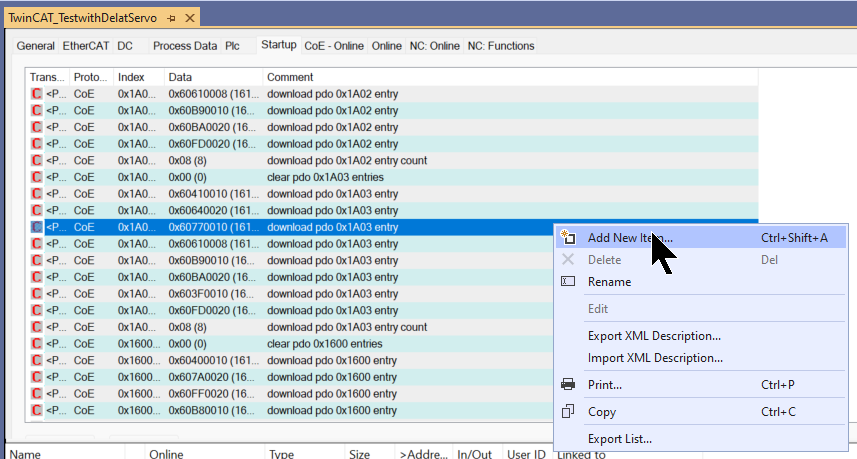
Startup パラメーターの設定画面が表示されます。
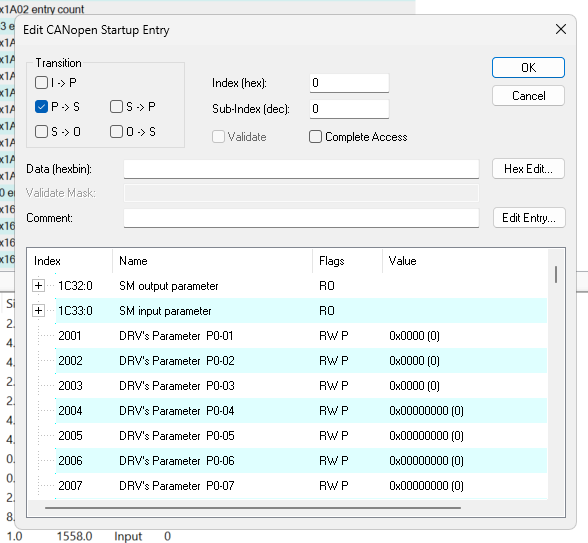
6098はHoming Methodのパラメーターで、そのパラメーターをダブルクリックしてください。
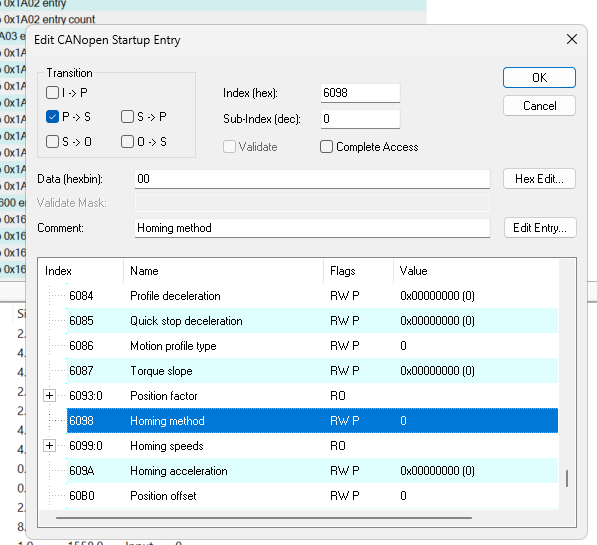
Valueを35にします。35=Direct Homingであり、本来はServoが後退して原点センサーを検知したりなど、様々な手法がありますが、Servoのみしかない環境なので、Direct Homingを使用します。
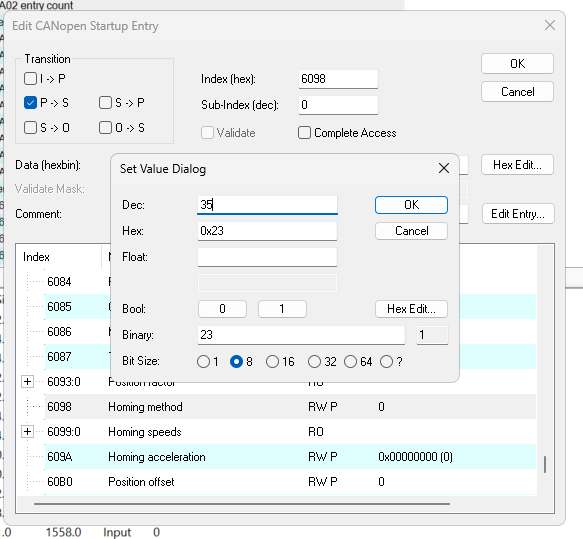
Done!
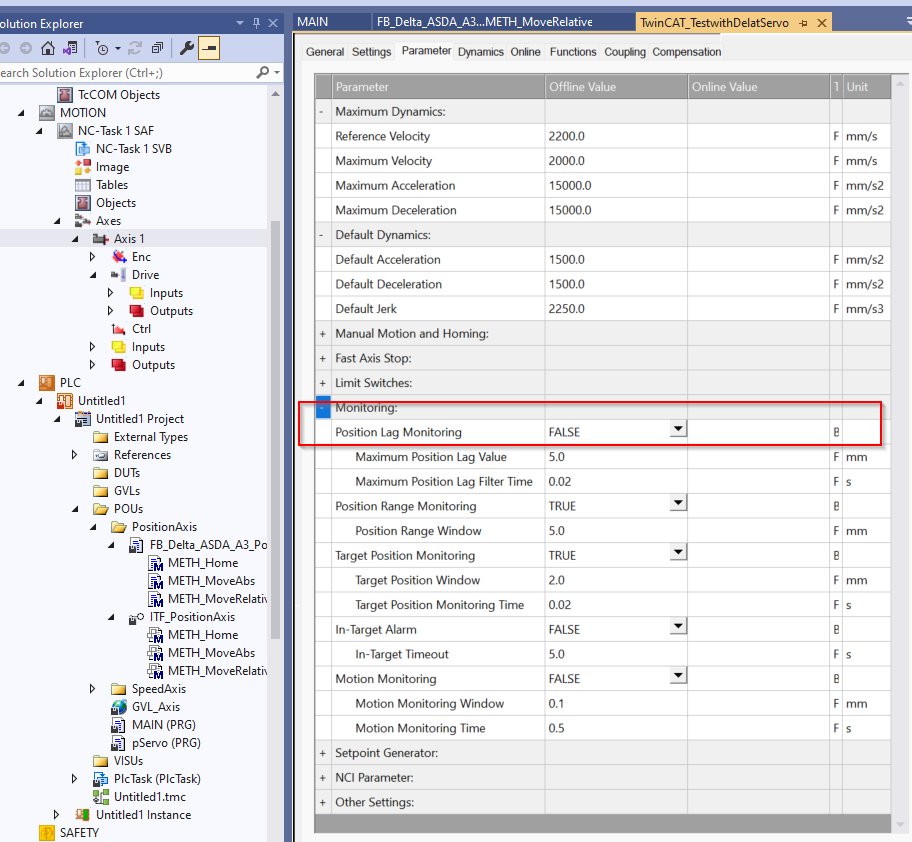
Lag Mode
また、最初にTuningしてないとき、Lag Monitorエラーのアラームが頻繁に出ますので、必要に合わせてPosition Lag Monitoring機能を一時的にFalseにしましょう。
Program
次はプログラムを作成します。今回はInterface・Function Block・Extendなど少しOOPのコンセプトを踏みながらプログラムを作成していきます。
Interface
まずはIntefaceの作成から始めます。Intefaceを使用すると、該当するFunction Blockが”なに”をすることだけに集中でき、”どう”やるかのプログラムと分割することができます。また、複数の異なるFunction BlockにもIntefaceだけ共通し、より統一的なプログラムを作成することが可能です。
INTERFACE ITF_SpeedAxis
こちらはServoを速度制御するときの”やること”を定義します。
METHOD METH_Half
こちらのMethodはServoが実行中のJOBを停止できます。
| METHOD METH_Half : INT VAR_INPUT iCmd: BOOL; END_VAR |
METHOD METH_JogFWBW
こちらのMethodはServoのJOG操作になります。
| METHOD METH_JogFWBW : INT VAR_INPUT iFw: BOOL; iBw: BOOL; iVelSetpoint: LREAL; iVelAcc: LREAL; iVelDec: LREAL; END_VAR |
METHOD METH_PowerON
こちらのMethodはServo ON操作になります。
| METHOD METH_PowerON : INT VAR_INPUT iCmd: BOOL; END_VAR |
METHOD METH_Reset
こちらのMethodはServoのリセット操作になります。
| METHOD METH_Reset : INT VAR_INPUT iCmd: BOOL; END_VAR |
METHOD METH_VelocityCmd
こちらのMethodはServoの定速運転操作になります。
| METHOD METH_VelocityCmd : INT VAR_INPUT iCmd: BOOL; iVelSetpoint: LREAL; iVelAcc: LREAL; iVelDec: LREAL; END_VAR |
PROPERTY Prop_CommunicationOK : BOOL
こちらのPROPERTYからServoの通信状態を取得できます。
PROPERTY Prop_Error : BOOL
こちらのPROPERTYからServoのエラー状態を取得できます。
PROPERTY Prop_MCState : ST_Axisstatus
こちらのPROPERTYからServo軸状態を取得できます。
PROPERTY Prop_ReadActualPosition : lReal
こちらのPROPERTYからServoの現在位置を取得できます。
PROPERTY Prop_ReadActualSpeed : lReal
こちらのPROPERTYからServoの現在速度を取得できます。
PROPERTY Prop_Ready : BOOL
こちらのPROPERTYからServoの準備OK信号を取得できます。
PROPERTY Prop_Running : BOOL
こちらのPROPERTYからServoの移動中信号を取得できます。
PROPERTY Prop_Stopped : BOOL
こちらのPROPERTYからServoの停止中信号を取得できます。
DUT
次は構造体を定義します。
eAxisBasicReturnValue
こちらの列挙からMethodの戻り値になりあす。
| {attribute ‘qualified_only’ := ”} {attribute ‘strict’ := ”} TYPE eAxisBasicReturnValue : ( init, ERROR, Done, Busy, nop, InVelocity ); END_TYPE |
Function Block
FB_Delta_ASDA_A3_SpeedAxis
こちらのFunction Blockでは先ほど定義したITF_SpeedAxis Interfaceを実装し、BeckhoffのMotion ライブラリに必要な関数をInstance定義します。
| FUNCTION_BLOCK FB_Delta_ASDA_A3_SpeedAxis IMPLEMENTS ITF_SpeedAxis VAR_INPUT ioAxis: REFERENCE TO AXIS_REF; END_VAR VAR _MC_Power: MC_Power; _MC_Reset: MC_Reset; _MC_Half: MC_Halt; _MC_Jog: MC_Jog; _MC_MoveVelocity: MC_MoveVelocity; _MC_ReadActualPosition:MC_ReadActualPosition; _MC_ReadActualVelocity:MC_ReadActualVelocity; _MC_ReadStatus:MC_ReadStatus; END_VAR |
METHOD METH_Half
METHOD METH_Half : INT
こちらは実行中のJOBを停止するためのMethodの実装になります。
| VAR_INPUT iCmd: BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Halfを使用しServo軸が実行中のJobを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_Half( Axis:=ioAxis ,Execute:=iCmd ,Deceleration:=100.0 ); IF R_TRIG.Q THEN METH_Half:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Half.Error THEN METH_Half:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Half.Busy THEN METH_Half:=eAxisBasicReturnValue.Busy; ELSIF _MC_Half.Done THEN METH_Half:=eAxisBasicReturnValue.Done; END_IF |
METH_JogFWBW
こちらはSERVOのJOB操作するMethodの実装になります。
| METHOD METH_JogFWBW : INT VAR_INPUT iFw: BOOL; iBw: BOOL; iVelSetpoint: LREAL; iVelAcc: LREAL; iVelDec: LREAL; END_VAR VAR fw: BOOL; bw: BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Jogを使用しServo軸のJOG操作を実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| fw:=iFw AND NOT iBw; bw:=iBw AND NOT iFw; R_TRIG( CLK:=(iFw AND NOT iBw) OR (iBw AND NOT iFw) ); _MC_Jog( Axis:=ioAxis ,JogForward:=fw ,JogBackwards:=bw ,Velocity:=iVelSetpoint ,Acceleration:=iVelAcc ,Deceleration:=iVelDec ,Mode:=E_JogMode.MC_JOGMODE_CONTINOUS ); IF R_TRIG.Q THEN METH_JogFWBW:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Jog.Error THEN METH_JogFWBW:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Jog.Busy THEN METH_JogFWBW:=eAxisBasicReturnValue.Busy; END_IF |
METH_PowerON
こちらはSERVO ON操作の実装になります。
| METHOD METH_PowerON : INT VAR_INPUT iCmd: BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Powerを使用しServo軸のServo ON/OFFを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_Power( Axis:=ioAxis ,Enable:=iCmd ,Enable_Positive:=TRUE ,Enable_Negative:=TRUE ); IF R_TRIG.Q THEN METH_PowerON:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Power.Error THEN METH_PowerON:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Power.Busy THEN METH_PowerON:=eAxisBasicReturnValue.Busy; ELSIF _MC_Power.Enable THEN METH_PowerON:=eAxisBasicReturnValue.Done; END_IF |
METH_Reset
こちらはSERVOのリセット操作の実装になります。
| METHOD METH_Reset : INT VAR_INPUT iCmd: BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Resetを使用しServo軸のServo ON/OFFを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_Reset( Axis:=ioAxis ,Execute:=iCmd ); IF R_TRIG.Q THEN METH_Reset:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Reset.Error THEN METH_Reset:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Reset.Busy THEN METH_Reset:=eAxisBasicReturnValue.Busy; ELSIF _MC_Reset.Done THEN METH_Reset:=eAxisBasicReturnValue.Done; END_IF |
METH_VelocityCmd
こちらはSERVOの定速運転の実装になります。
| METHOD METH_VelocityCmd : INT VAR_INPUT iCmd: BOOL; iVelSetpoint: LREAL; iVelAcc: LREAL; iVelDec: LREAL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_MoveVelocityを使用しServo軸のServo ON/OFFを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_MoveVelocity( Axis:=ioAxis ,Execute:=iCmd ,Velocity:=iVelSetpoint ,Acceleration:=iVelAcc ,Deceleration:=iVelDec ); IF R_TRIG.Q THEN METH_VelocityCmd:=eAxisBasicReturnValue.nop; END_IF; IF _MC_MoveVelocity.Error THEN METH_VelocityCmd:=eAxisBasicReturnValue.ERROR; ELSIF _MC_MoveVelocity.Busy THEN METH_VelocityCmd:=eAxisBasicReturnValue.Busy; ELSIF _MC_MoveVelocity.InVelocity THEN METH_VelocityCmd:=eAxisBasicReturnValue.InVelocity; END_IF |
PROPERTY Prop_CommunicationOK : BOOL
こちらのPropertyはIodataInvalidの変数から通信OKかを判定します。
| Prop_CommunicationOK:=not ioAxis.Status.IoDataInvalid; |
PROPERTY Prop_Error : BOOL
こちらのPropertyはErrorの変数から通信OKかを判定します。
| Prop_Error:=ioAxis.Status.Error; |
PROPERTY Prop_MCState : Tc2_MC2.ST_AxisStatus
こちらのPropertyはMC_ReadStatusを使用し、軸の状態を取得します。
| _MC_ReadStatus( Axis:=ioAxis ,Enable:=TRUE ); Prop_MCState:=_MC_ReadStatus.Status; |
PROPERTY Prop_ReadActualPosition : LREAL
こちらのPropertyはMC_ReadActualPositionを使用し、軸の現在位置を取得します。
| _MC_ReadActualPosition( Axis:=ioAxis ,Enable:=True ); Prop_ReadActualPosition:=_MC_ReadActualPosition.Position; |
PROPERTY Prop_ReadActualSpeed : LREAL
こちらのPropertyはMC_ReadActualVelocityを使用し、軸の現在速度を取得します。
| _MC_ReadAutualVelocity( Axis:=ioAxis ,Enable:=TRUE); Prop_ReadActualSpeed:=_MC_ReadAutualVelocity.ActualVelocity; |
PROPERTY Prop_Ready : BOOL
こちらのPropertyはReadyの変数からServoの準備OK状態を判定します。
| Prop_Ready:=ioAxis.Status.Operational; |
PROPERTY Prop_Running : BOOL
こちらのPropertyはReadyの変数からServoが移動してるかを判定します。
| Prop_Running:=ioAxis.Status.Moving; |
PROPERTY Prop_Stoppped : BOOL
こちらのPropertyはReadyの変数からServoが停止してるかを判定します。
| Prop_Stoppped:=ioAxis.Status.NotMoving; |
Program-Position Axis
先ほどSpeedAxisのFunction Blockを定義しましたが、今回の記事では簡単な位置決めにもやりたいので、新たなFunction Block、Interfaceも作成しますし、元にあるInterfaceやFBから拡張していきましょう。
Interface‐ITF_PositionAxis
新しいInterfaceを定義し、INTERFACE ITF_SpeedAxisから拡張しましょう。
METHOD METH_Home
こちらのMethodはServoをHomeすることができます。
| METHOD METH_Home : INT VAR_INPUT iCmd: BOOL; END_VAR |
METHOD METH_MoveAbs
こちらのMethodはServoに絶対位置決め操作を実装します。
| METHOD METH_MoveAbs : INT VAR_INPUT iCmd: BOOL; iVelSetpoint: LREAL; iVelAcc: LREAL; iVelDec: LREAL; iPosition: LREAL; END_VAR |
METHOD METH_MoveRelative
こちらのMethodはServoに相対位置決め操作を実装します。
| METHOD METH_MoveRelative : INT VAR_INPUT iCmd: BOOL; iVelSetpoint: LREAL; iVelAcc: LREAL; iVelDec: LREAL; iDistance: LREAL; END_VAR |
Function Block
次は位置決め用のFBを作成しましょう。
FB_Delta_ASDA_A3_PositionAxis
こちらのFB先ほど作ったFB_Delta_ASDA_A3_SpeedAxisを拡張し、またITF_PositionAxisを実装する形になります。また、BeckhoffのMotion ライブラリに必要な関数をInstance定義します。
| FUNCTION_BLOCK FB_Delta_ASDA_A3_PositionAxis EXTENDS FB_Delta_ASDA_A3_SpeedAxis IMPLEMENTS ITF_SpeedAxis, ITF_PositionAxis VAR _MC_MoveAbsolute: MC_MoveAbsolute; _MC_MoveRelative: MC_MoveRelative; _MC_Home: MC_Home; END_VAR |
METH_Home
こちらはSERVOのHOME操作するMethodの実装になります。
| METHOD METH_Home : INT VAR_INPUT iCmd: BOOL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
MC_Homeを使用しServo軸のHome操作を実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| R_TRIG(CLK:=iCmd); _MC_Home( Axis:=ioAxis ,Execute:=iCmd ,Position:=0.0 ,HomingMode:=MC_HomingMode.MC_Direct ); IF R_TRIG.Q THEN METH_Home:=eAxisBasicReturnValue.nop; END_IF; IF _MC_Home.Error THEN METH_Home:=eAxisBasicReturnValue.ERROR; ELSIF _MC_Home.Busy THEN METH_Home:=eAxisBasicReturnValue.Busy; ELSIF _MC_Home.Done THEN METH_Home:=eAxisBasicReturnValue.Done; END_IF |
METH_MoveAbs
MC_MoveAbsoluteを使用しServo軸の絶対位置決めを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| METHOD METH_MoveAbs : INT VAR_INPUT iCmd: BOOL; iVelSetpoint: LREAL; iVelAcc: LREAL; iVelDec: LREAL; iPosition: LREAL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
| R_TRIG(CLK:=iCmd); _MC_MoveAbsolute( Axis:=ioAxis ,Execute:=iCmd ,Position:=iPosition ,Velocity:=iVelSetpoint ,Acceleration:=iVelAcc ,Deceleration:=iVelDec ); IF R_TRIG.Q THEN METH_MoveAbs:=eAxisBasicReturnValue.nop; END_IF; IF _MC_MoveAbsolute.Error THEN METH_MoveAbs:=eAxisBasicReturnValue.ERROR; ELSIF _MC_MoveAbsolute.Busy THEN METH_MoveAbs:=eAxisBasicReturnValue.Busy; ELSIF _MC_MoveAbsolute.Done THEN METH_MoveAbs:=eAxisBasicReturnValue.Done; END_IF |
METH_MoveRelative
MC_MoveRelativeを使用しServo軸の相対位置決めを実行させ、またFunction Blockの実行状態・結果に沿って適切な戻り値を返します。
| METHOD METH_MoveRelative : INT VAR_INPUT iCmd: BOOL; iVelSetpoint: LREAL; iVelAcc: LREAL; iVelDec: LREAL; iDistance: LREAL; END_VAR VAR_INST R_TRIG:R_TRIG; END_VAR |
| R_TRIG(CLK:=iCmd); _MC_MoveRelative( Axis:=ioAxis ,Execute:=iCmd ,Distance:=iDistance ,Velocity:=iVelSetpoint ,Acceleration:=iVelAcc ,Deceleration:=iVelDec ); IF R_TRIG.Q THEN METH_MoveRelative:=eAxisBasicReturnValue.nop; END_IF; IF _MC_MoveRelative.Error THEN METH_MoveRelative:=eAxisBasicReturnValue.ERROR; ELSIF _MC_MoveRelative.Busy THEN METH_MoveRelative:=eAxisBasicReturnValue.Busy; ELSIF _MC_MoveRelative.Done THEN METH_MoveRelative:=eAxisBasicReturnValue.Done; END_IF |
GVL_Axis
Global Variables Listを追加し、AXIS_REF変数を定義します。
| {attribute ‘qualified_only’} VAR_GLOBAL axies:ARRAY[0..9]OF AXIS_REF; END_VAR |
Program-pServo
こちらはメインプログラムになり、先程作成したFunction Blockを呼び出し、CASE文を使用し絶対位置決めと相対位置決めの繰り返しをします。
| PROGRAM pServo VAR Axis1: FB_Delta_ASDA_A3_PositionAxis; Status:ST_AxisStatus; ActVelocity,ActPosition:LREAL; bFw: BOOL; bBw: BOOL; bHome: BOOL; bMoveAbs: BOOL; bMoveRelative: BOOL; bCommunicationOK: BOOL; bError: BOOL; bRunning: BOOL; bStopped: BOOL; bPowerON: BOOL; bReset: BOOL; RetValue: INT; RetValueAbs: INT; RetValueRet:INT; bReady: BOOL; bRun: BOOL; bStop: BOOL; fSetValue: REAL; f32AbsPos: REAL; f32AbsVel: REAL:=100.0; f32AbsAcc: REAL:=100.0; f32AbsDec: REAL:=100.0; f32RelativePos: REAL; f32RelativeVel: REAL:=100.0; f32RelativeAcc: REAL:=100.0; f32RelativeDec: REAL:=100.0; // iStep:INT; TON:TON; iStart:BOOL; iStop:BOOL; myCounter:INT; END_VAR |
| //Axis of Delta Servo Axis1(ioAxis:=GVL_Axis.axies[0]); //Power ON the Axis RetValue:= Axis1.METH_PowerON( iCmd:=bPowerON ); //Get the Status //Ready bReady:=Axis1.Prop_Ready; //Running bRunning:=Axis1.Prop_Running; //Error bError:=Axis1.Prop_Error; //Stopped bStopped:=Axis1.Prop_Stopped; //CommunicationOK bCommunicationOK:=Axis1.Prop_CommunicationOK; //Status Status:=Axis1.Prop_MCState; //ActSpeed ActVelocity:=Axis1.Prop_ReadActualSpeed; //ActPostion ActPosition:=Axis1.Prop_ReadActualPosition; //Reset RetValue:=Axis1.METH_Reset( iCmd:=bReset ); IF RetValue = eAxisBasicReturnValue.Busy THEN bReset:=FALSE; END_IF //Halt RetValue:=Axis1.METH_Half( iCmd:=bStop ); IF Status.Stopping OR bError THEN bStop:=FALSE; END_IF //Home RetValue:=Axis1.METH_Home( iCmd:=bHome ); //MoveVelocity RetValue:=Axis1.METH_VelocityCmd( iCmd:=bRun ,iVelSetpoint:=fSetValue ,iVelAcc:=100.0 ,iVelDec:=100.0 ); //Jog RetValue:=Axis1.METH_JogFWBW( iFw:=bFw AND NOT bBw ,iBw:=bBw AND NOT bFw ,iVelSetpoint:=fSetValue ,iVelAcc:=100.0 ,iVelDec:=100.0 ); //MoveAbsolute RetValueAbs:=Axis1.METH_MoveAbs( iCmd:=bMoveAbs ,iVelSetpoint:=f32AbsVel ,iVelAcc:=f32AbsAcc ,iVelDec:=f32AbsDec ,iPosition:=f32AbsPos ); //MoveRelative RetValueRet:=Axis1.METH_MoveRelative( iCmd:=bMoveRelative ,iVelSetpoint:=f32RelativeVel ,iVelAcc:=f32RelativeAcc ,iVelDec:=f32RelativeDec ,iDistance:=f32RelativePos ); // IF Status.Moving OR bError THEN bRun:=FALSE; bMoveAbs:=FALSE; bMoveRelative:=FALSE; END_IF CASE iStep OF 0: iStop:=FALSE; IF iStart AND iStep =0 THEN iStep:=10; iStart:=FALSE; myCounter:=0; END_IF 10: bMoveAbs:=TRUE; f32AbsPos:=1000.0; IF GVL_Axis.axies[0].Status.Moving THEN iStep:=20; bMoveAbs:=FALSE; END_IF 20: IF RetValueAbs = eAxisBasicReturnValue.Done THEN iStep:=30; END_IF 30: bMoveRelative:=TRUE; f32RelativePos:=-200.0; IF GVL_Axis.axies[0].Status.Moving THEN iStep:=40; bMoveRelative:=FALSE; END_IF 40: IF RetValueRet = eAxisBasicReturnValue.Done THEN IF NOT iStop THEN IF myCounter >3 THEN iStep:=10; myCounter:=0; ELSE myCounter:=myCounter+1; iStep:=30; END_IF; ELSE iStep:=0; END_IF; END_IF END_CASE |
Program-Main
最後はMAINプログラムで先程作ったpServo POUを呼び出します。
| PROGRAM MAIN VAR END_VAR |
| pServo(); |
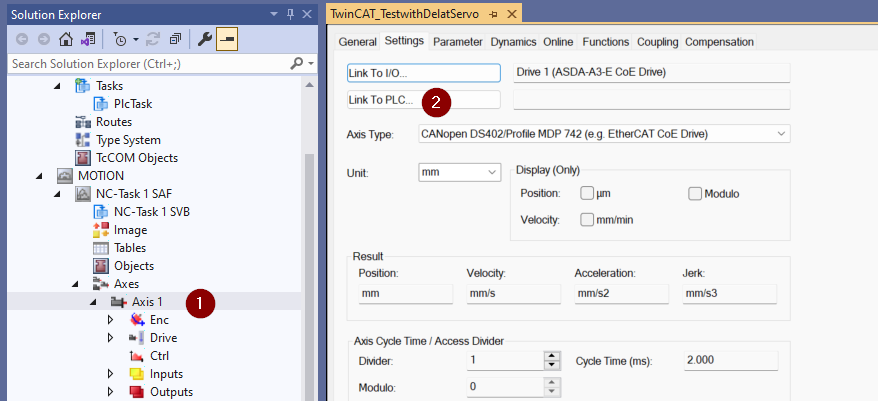
Link to PLC
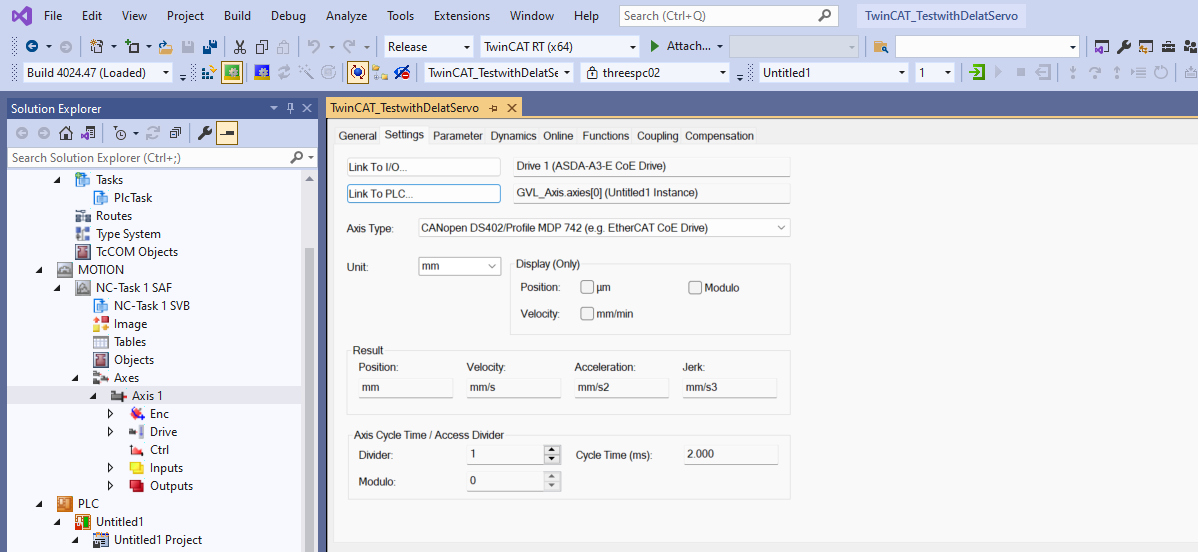
Global Variables Listで定義したAXIS_REFとAXISを接続するため、Axis>Settings>Link to PLCをクリックします。
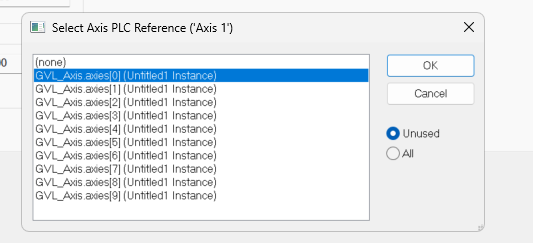
Done!
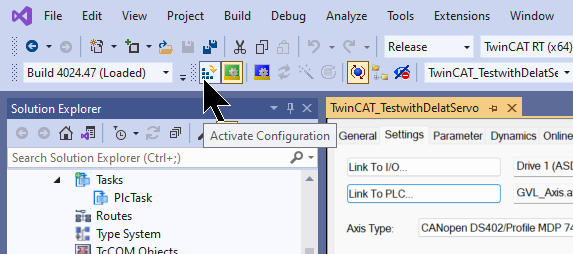
Active Configuration
Active Configurationをクリックし、一回プロジェクトをRuntimeにDownloadします。
OKで進みます。
OKでTwinCAT RuntimeをRun Modeにソフトします。
Login
LoginでプログラムをDownloadします。
Yesで進みましょう。
Start
最後はStartボタンでRuntimeのプログラムを実行します。
Add Scope Project
最後はScopeプロジェクトを追加し、TwinCAT Runtimeの変数をリアルタイムでMonitorしましょう。Solution>右クリック>Add>New Projectをクリックします。
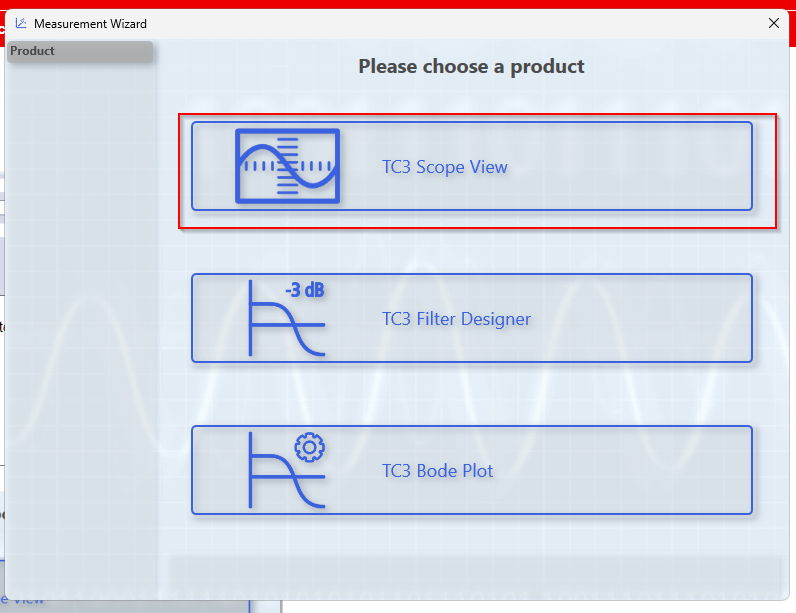
Measurement Wizardを選び>Nextで進みます。
Measurementのプロジェクト名を入力し、Createで進みます。
今回はTC3 Scope Viewを使用します。
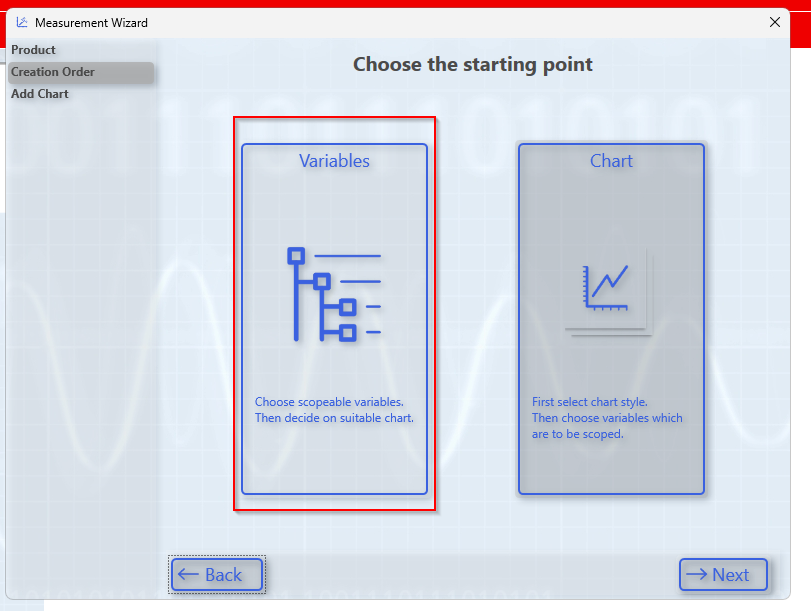
Monitorしたい変数を設定するため、Variablesをクリックします。
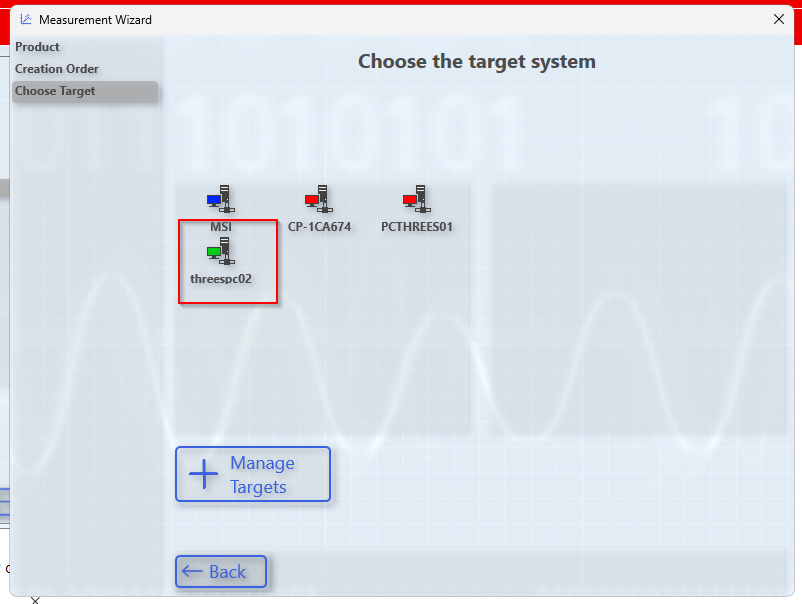
Monitorしたい変数があるTarget システムを選択しましょう。
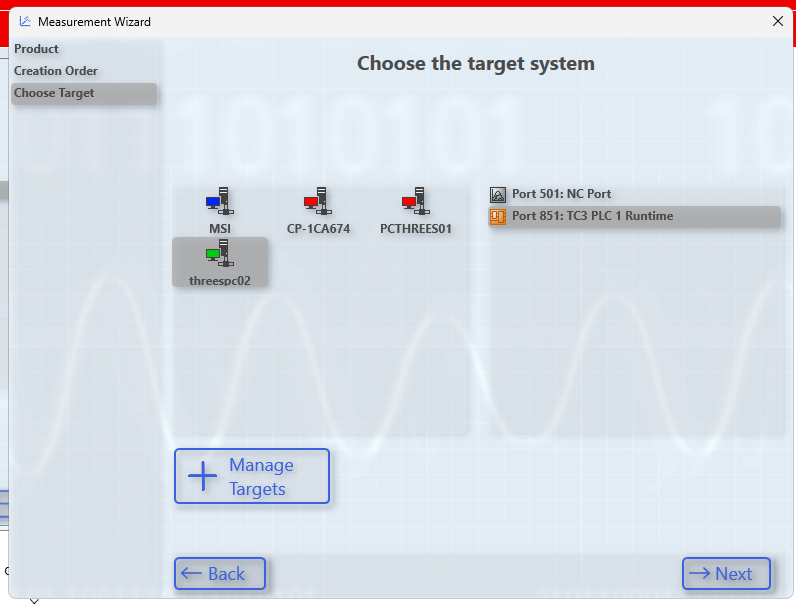
今回はPLC Runtimeの変数をMonitorしたいので、Port 851を選び、Nextで進みます。
PLC runtimeにある変数を一覧できます。
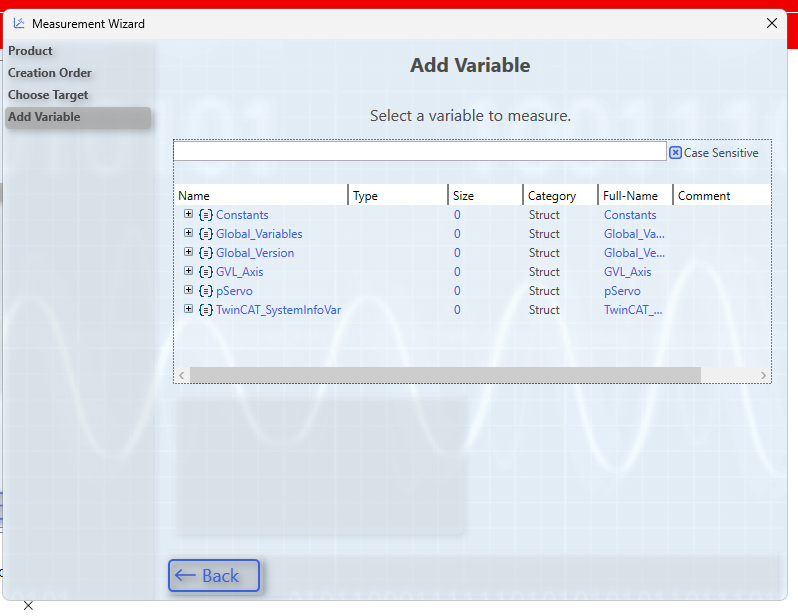
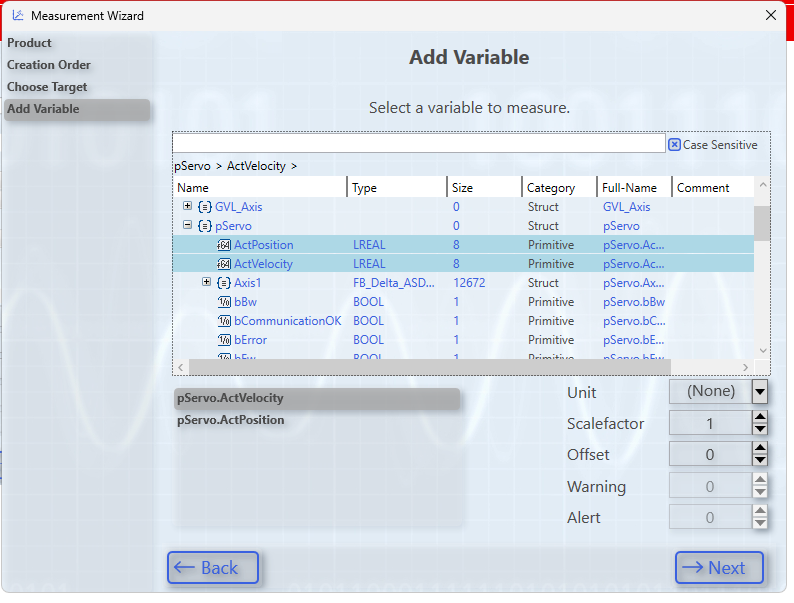
次は監視する変数を選び、Nextで進みます。
Time-based Chartを使用します。
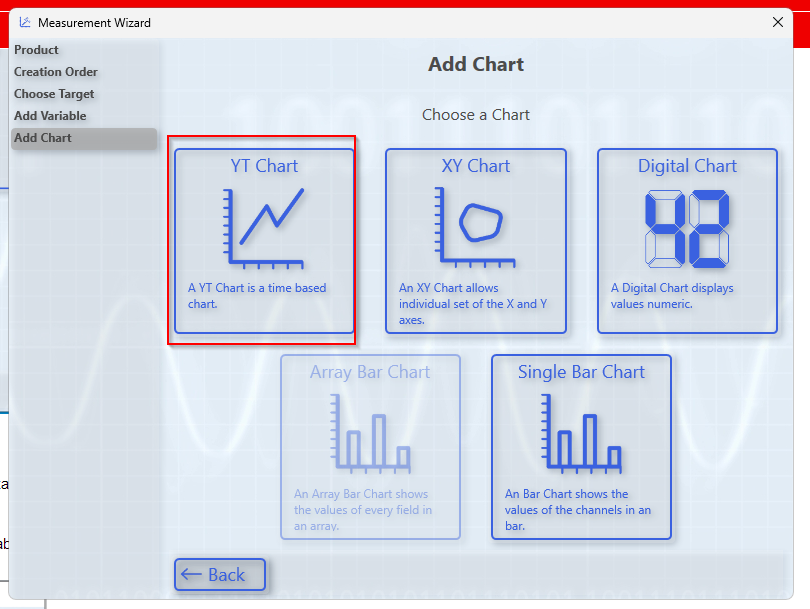
CreateでChartを作成しましょう。
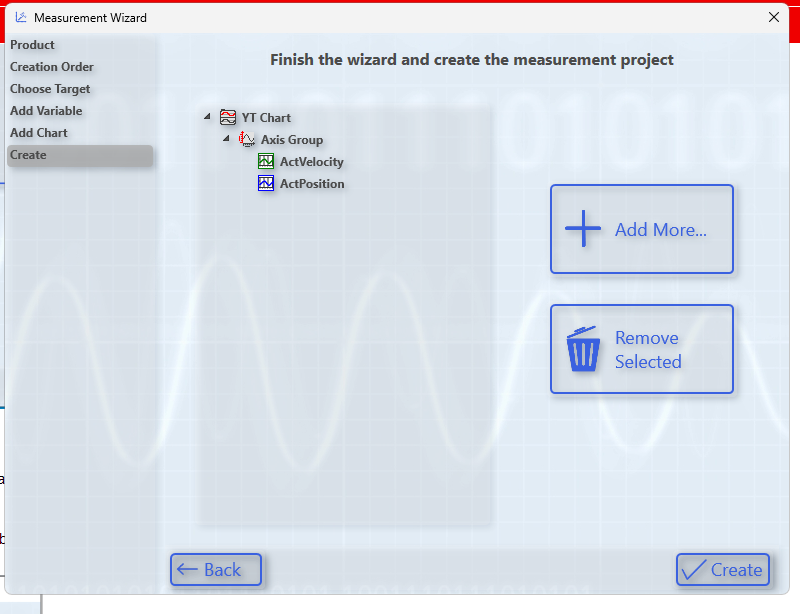
Done!
変数をレコードしたい場合、Start Recordボタンをクリックしてください。
Done!!
レコードを中止したい場合、Stop Recordをクリックしましょう。
OKでレコードを停止していきましょう。
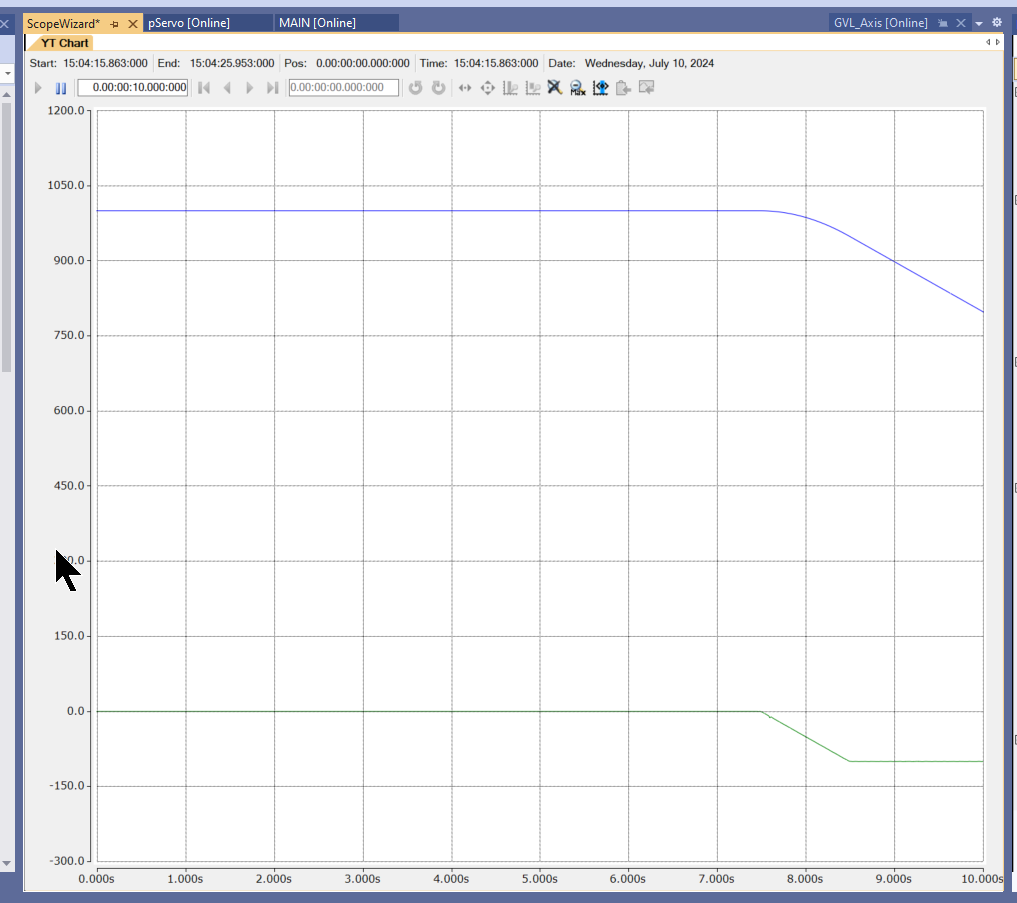
Result
こちらの動画から動作確認できます。
こちらのLinkから記事のプロジェクトをDownloadしてください。
https://github.com/soup01Threes/TwinCAT3/blob/main/TwinCAT_TestwithDelatServo.tnzip