この記事は安川のSGDXSシリーズのEtherCAT DriveをDefault 2nd PDO Mapping以外のMappingを使用する場合の手順をメモします。
前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
現在、私達の活動はほぼ無償で続けており、より多くのコンテンツを提供するためには、皆様の温かいご支援が大変重要です。もし可能であれば、以下のリンクから応援していただけると大変嬉しく思います。
高橋クリスのメンバーシップ
こちらはFullさん(full@桜 八重 (@fulhause) / X)と共にやっているラジオにメンバーシップを登録いただけます。
https://note.com/fulhause/membership/join
AMAZON ギフトリスト
こちらは自分のブログのコンテンツ制作や設備の充実に大いに役立てさせていただきます。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon
こちらは自分のブログのコンテンツ制作や設備の充実に対する小さな応援の気持ちのPatreonです。
https://www.patreon.com/user?u=84249391
皆様のサポートが、私たちの活動をより充実させる力となります。
どうぞよろしくお願いします。
メールアドレス(*=@)
X
Start
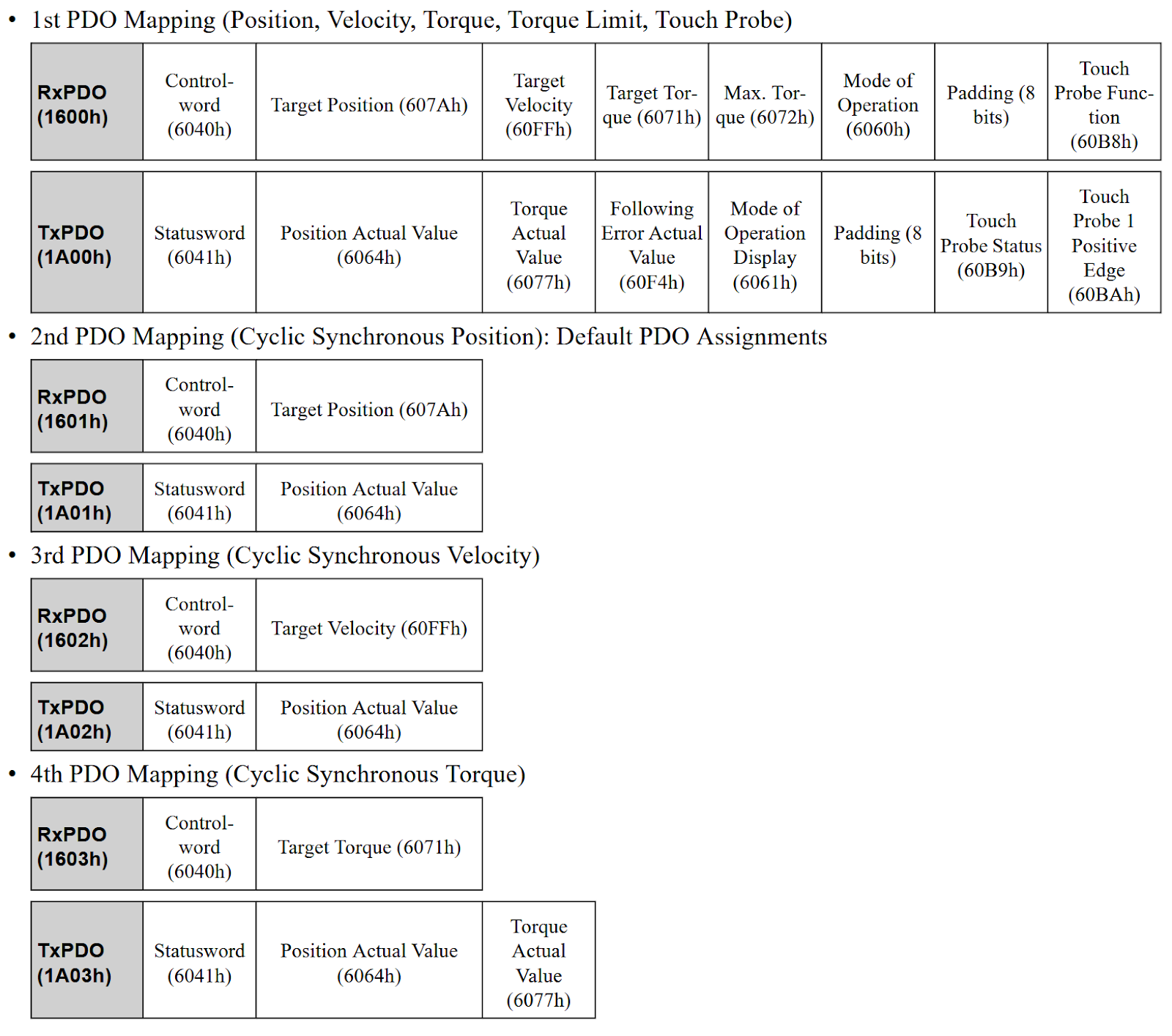
次の表に、サーボパックのデフォルトPDOマッピングを示し、Defaultの2nd PDO MappingはEtherCATスレーブ情報ファイル(XML)で定義されています。
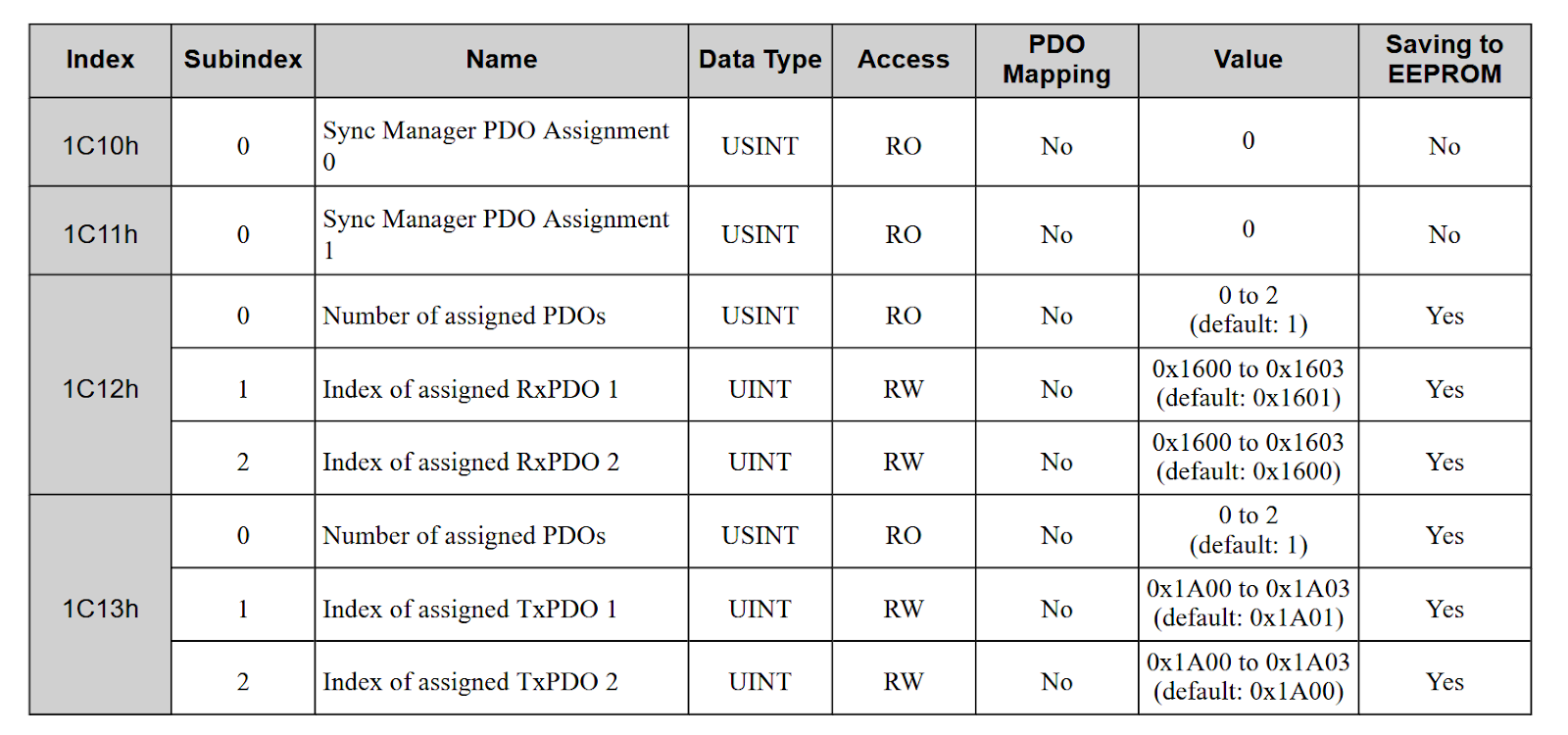
Sync Manager PDO割り当て(1C10h~1C13h)はデータ通信の過程でどのPDOを転送するかを定義します。
安川電機のServo Drive設定ツールSigmaWin+ を開き、Servo Driveと接続します。Basic Function >Edit Parametersをクリックします。
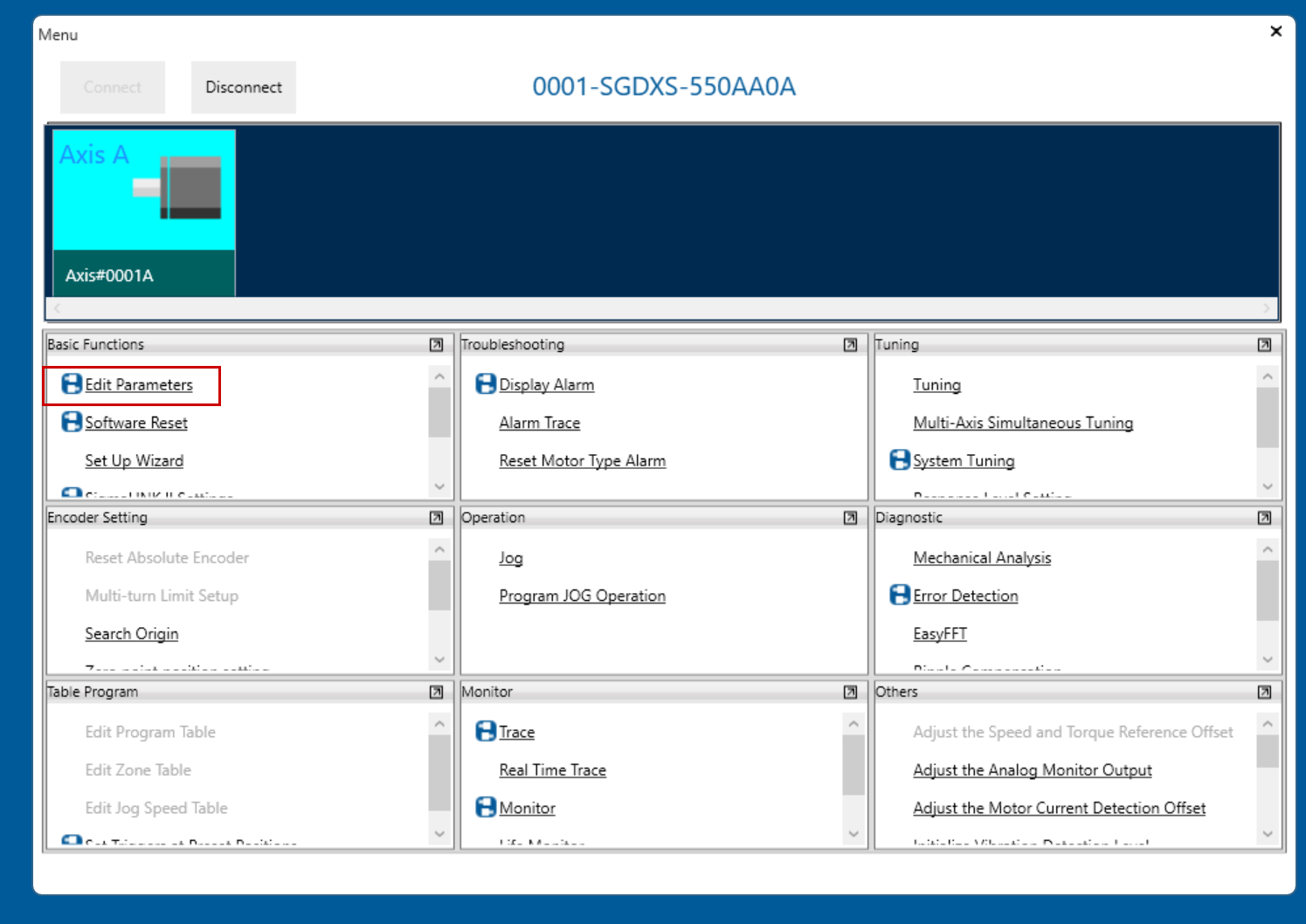
次はEtherCATパラメータ画面を開きます。
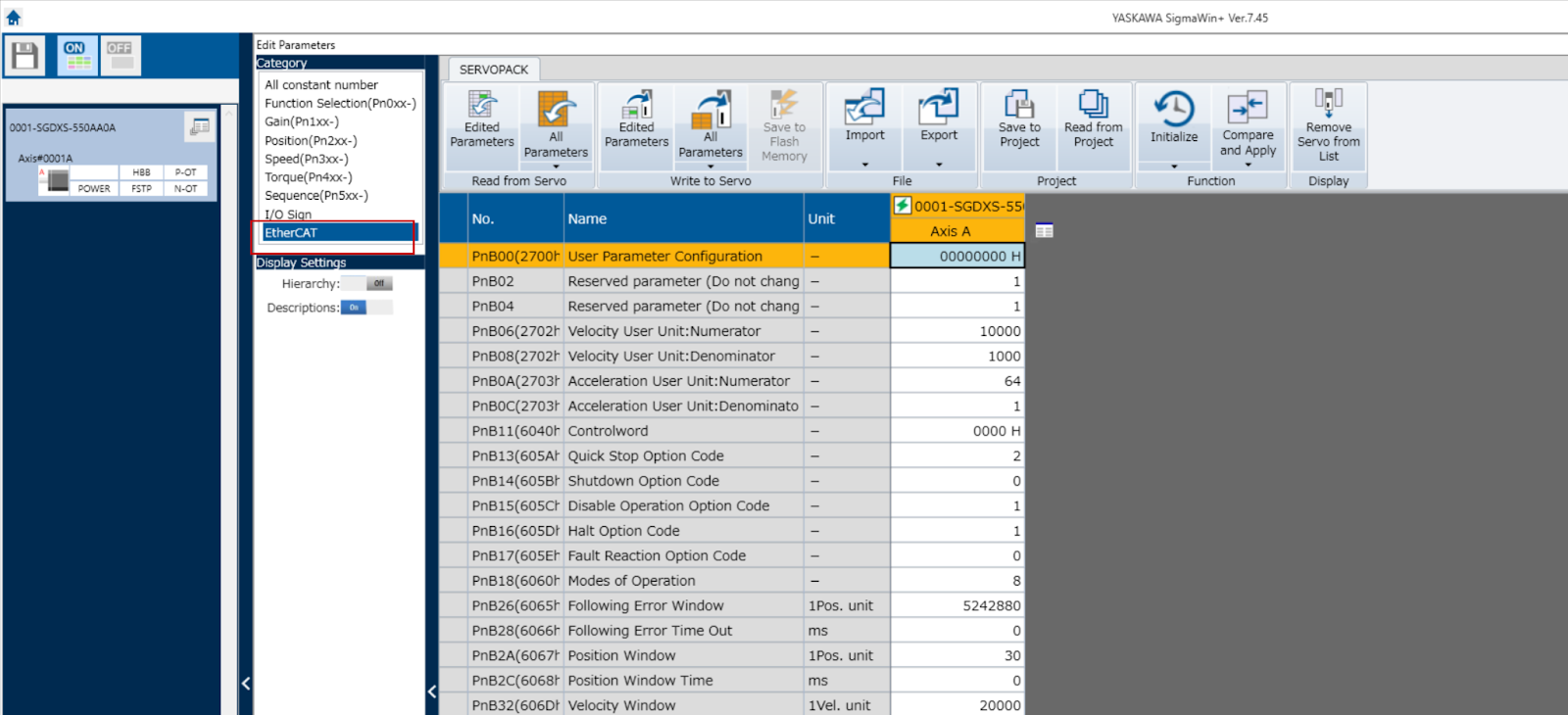
Sync ManagerとPDO間の割り当てを無効にするため、オブジェクト1C12h〜1C13hのサブインデックス0を0に設定します。
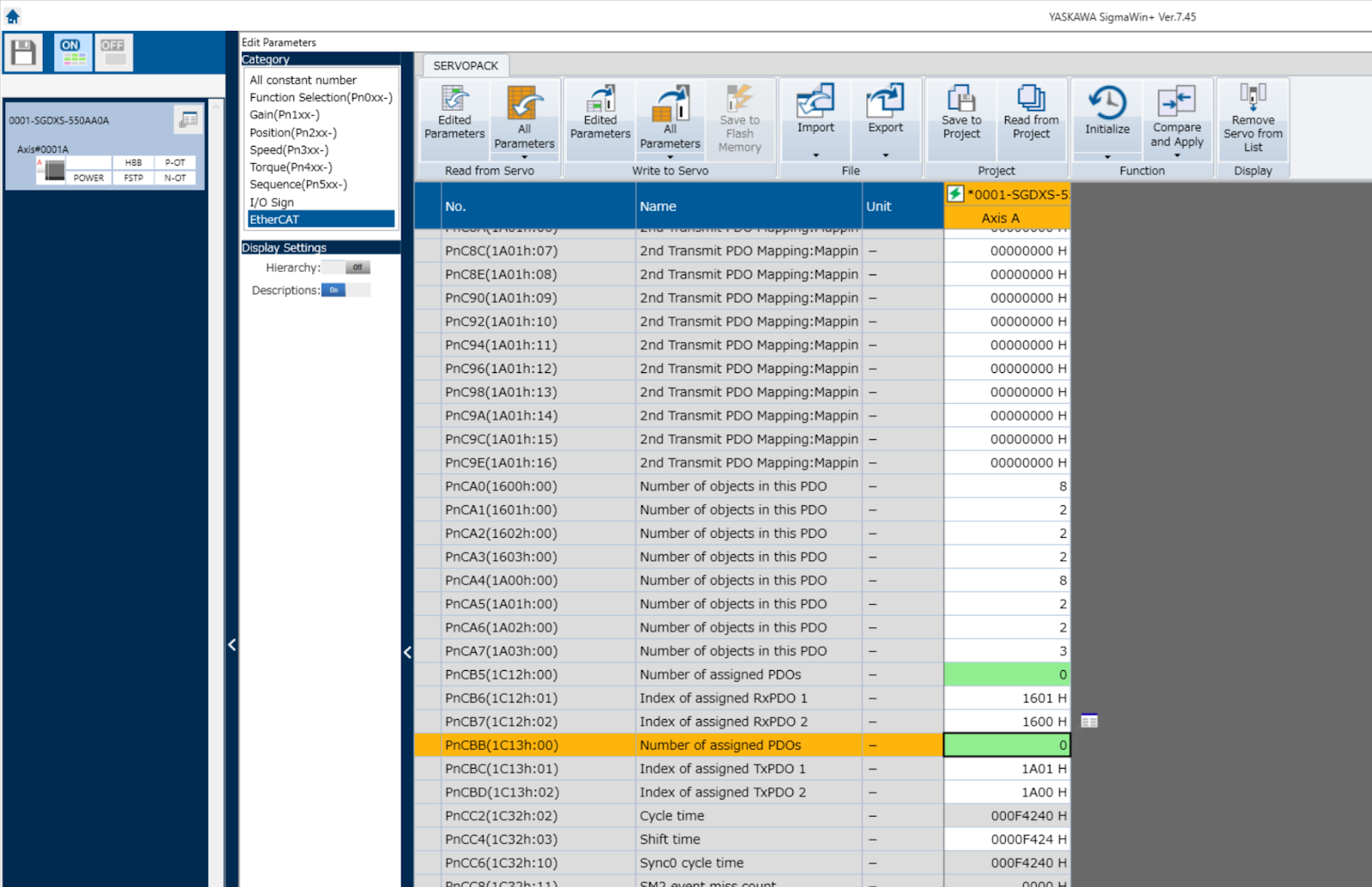
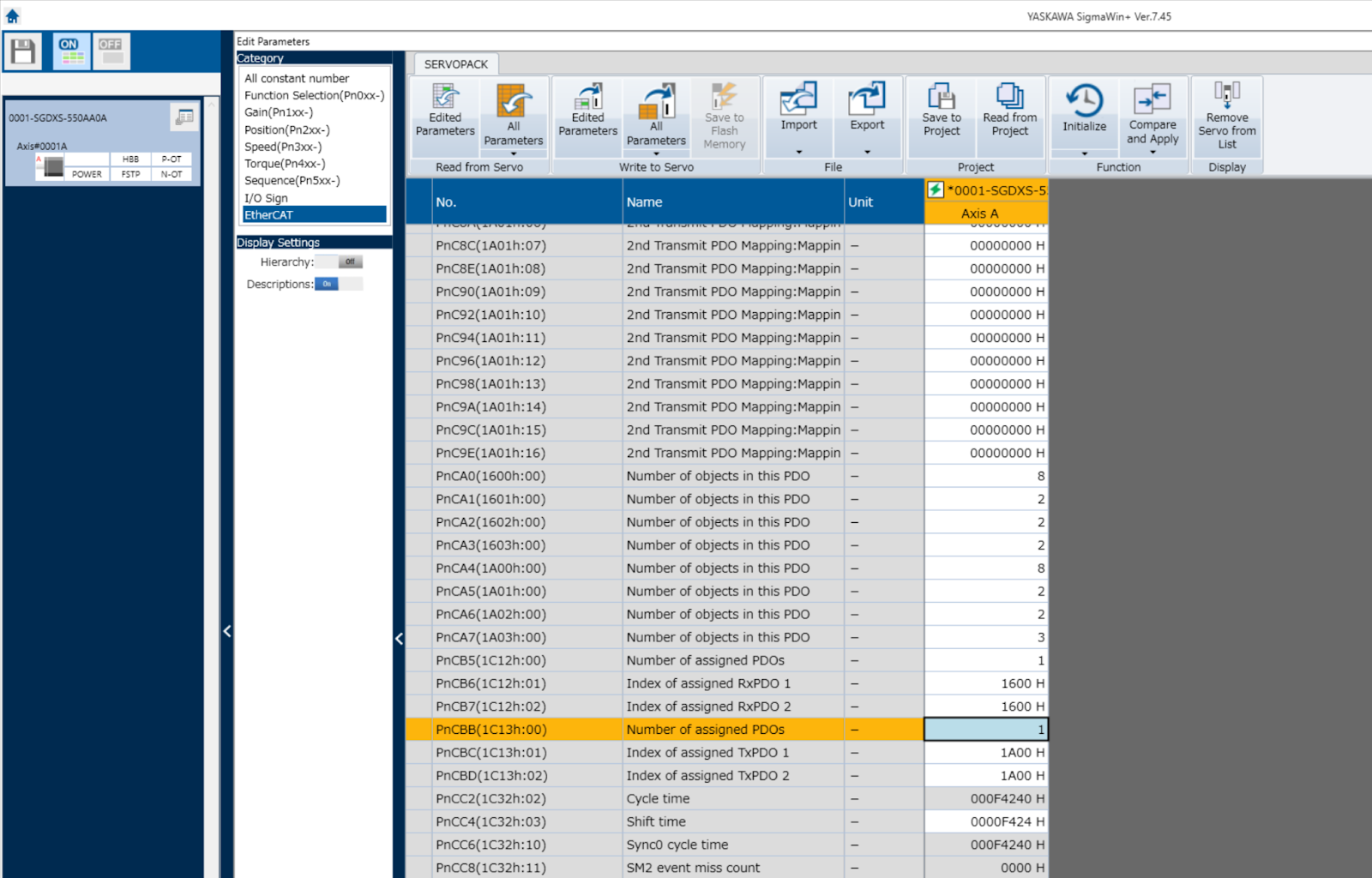
PDO マッピングオブジェクトのマッピングエントリをすべて設定します。(1600h~1603h、1A00h~1A03h)
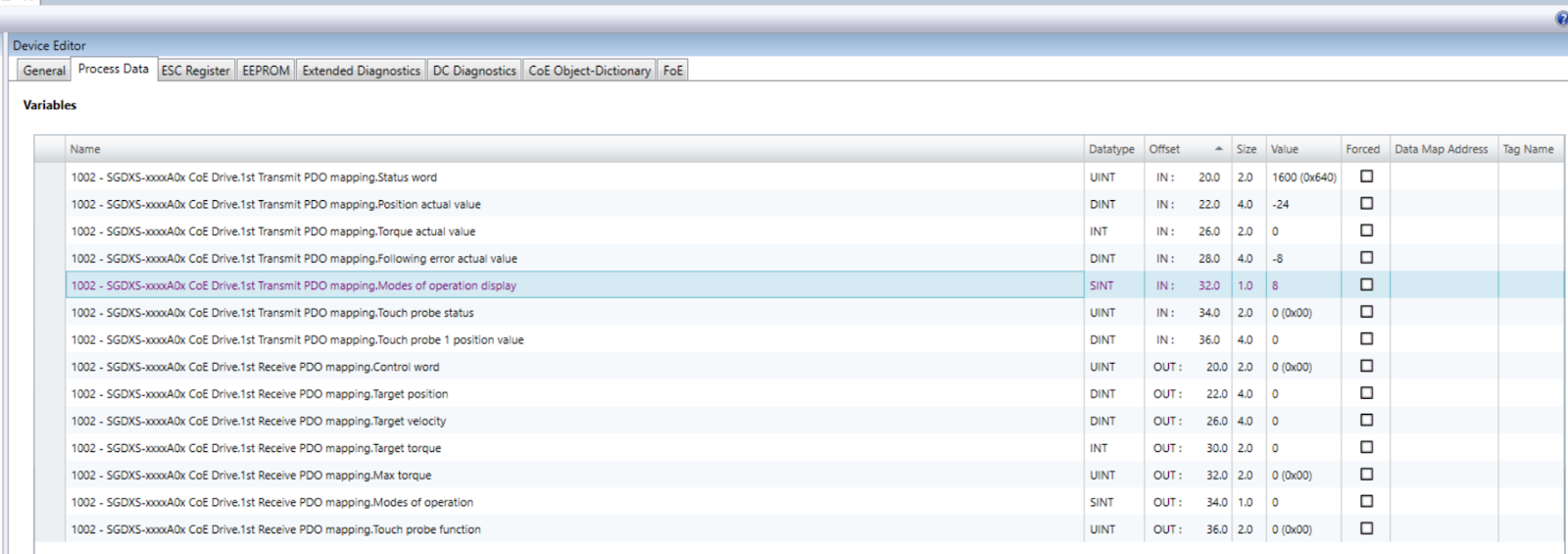
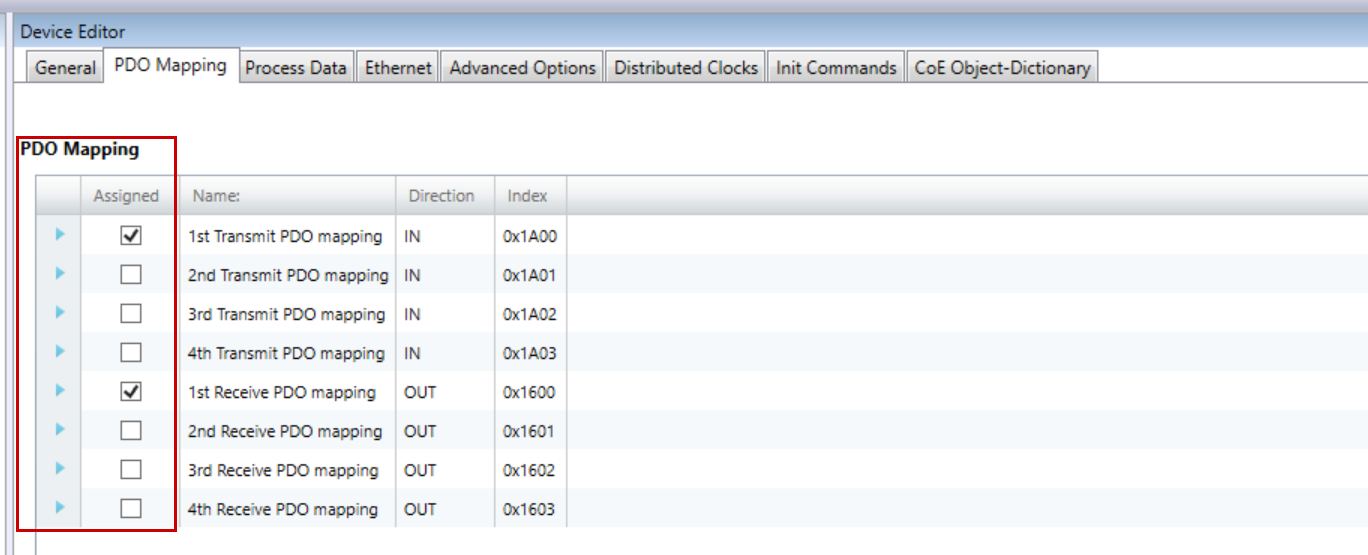
今回記事で使用したのはDelta Motion のEtherCAT モジュールなので、PDO MappingにAssignedのCheckboxに1st Transmit PDO Mappingと1st Receive PDO MappingをCheckbox入れましょう。
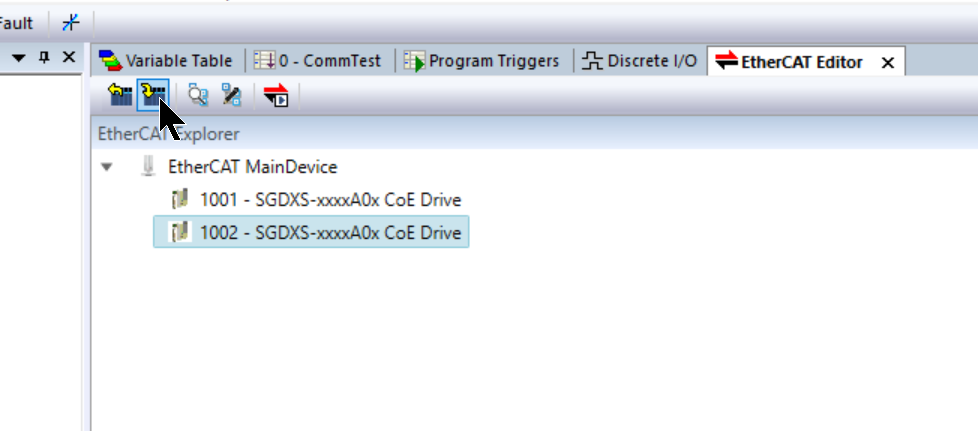
次はEtherCAT ConfigurationをCPUにDownloadします。
Done!安川電機のSGDXSシリーズとEtherCAT通信できました。
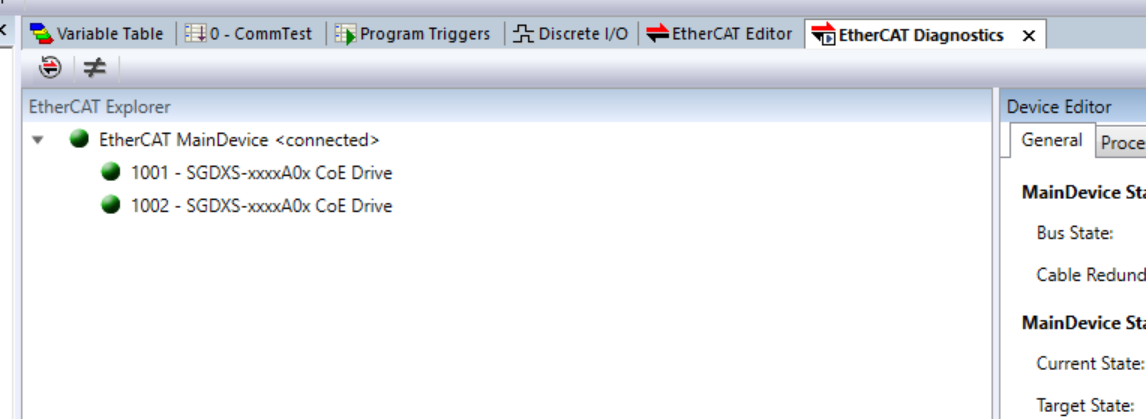
Mode of displayなどのデータを取得できました。