
BERGHOF#NTP Serverと時間同期しましょう
こちらでNTP Serverをセットアップし、BERGHOF社のRaspberry Piベースのモジュール型CODESYS PLCの時間と...
こちらでNTP Serverをセットアップし、BERGHOF社のRaspberry Piベースのモジュール型CODESYS PLCの時間と...
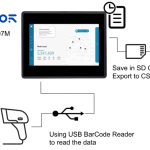
今回の記事ではEXORのex707Mを使用し、汎用のUSB Barcode Readerと接続し、QR CodeやBar Codeを読み取...

こちらはIndusol社のProscanActiveソフトウェアを使用し、ProfinetやEthernet/IPネットワーク内の機器の診...

こちらの記事で非Root UserでDockerを実行する手順をメモします。 前書き いつも私の技術ブログとYouTu...
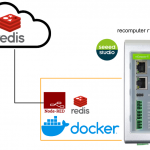
今回の記事ではNod-redを使用し、様々なコマンドをLocal/Cloud redis Serverと接続する手順を1から説明します。ま...
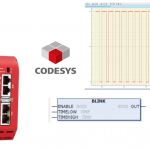
今回の記事ではCodesysのUtilライブラリにあるBLINK Function Blockを使用し点滅信号を特定の時間だけ点灯・消灯す...

こちらは新しい記事シリーズで、EPSONのRC+でEPSON社のロボットを自分のPCからSimulationし、ロボットの操作やプログラム...

こちらはDockerでRedis Stack を使用する方法をメモします。また記事の中に使うハードウェアはSeeed Studioのrec...

こちらはIndusol社のネットワーク機器記事の第6話を展開していきます。今回はWAGOの750-8215とRSTPネットワークを組み上げ...
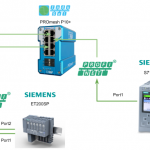
こちらはIndusol社のネットワーク機器記事の第5話を展開していきます。PROmesh P10+にはMRP(Media Redundan...