Project#Start up your ATV320_Part6_CANOPENxBeckhoff EL6751 Get STO,DI Status
今回はBeckhoffのEL6751を使用し続け、Schneider社のATV320から基本的な制御はもちろん、入力端子台やSTO状態も取...
今回はBeckhoffのEL6751を使用し続け、Schneider社のATV320から基本的な制御はもちろん、入力端子台やSTO状態も取...
Web browserなどのMedia部品をEXOR JSMARTパネルに使用するときはPluginが必要です。例えば、下記のようにWid...
Fuzzy Studio? Fuzzy Studioとは、誰でもロボットのワークセルをレイアウト、テスト、再構成することができ、わず...

WSL(Windows Subsystem for Linux)とはWindows上でLinuxを動かすための機能です。 でもVir...
この記事ではPLCNEXT AXCF 2152(Firmware2023.0)を電源入れるときに自動的にmosquittoのMQTT Br...
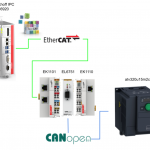
今回の記事ではBeckhoffのEL6751を使用しCANOPEN Masterを立ち上げ、Schneider社のATV320とCAN通信...

今回の記事ではpfc-kbus-apiを使用しPLC RUNTIMEなしでPFC200 ControllerにインストールされてるIOモジ...
Wago PFC CPUのWeb serverにアクセスし、Configuration>Ports>Network Servi...
PiでScriptを自動起動のセットアップ方法を紹介します。 下記のFileにアクセスします。 sudo nano /home...
今回はDobot CR5の関節座標・直角座標・User Frameについて説明します。よろしくおねがいします。 Thanks...