今回の記事ではFANUC RoboGuideで簡単なPick and Placeアプリケーションを作成します。
さ、はじめよう。
Reference Link
http://soup01.com/ja/category/%e3%83%ad%e3%83%9c%e3%83%83%e3%83%88/fanuc/
Implementation
Use Navigator
今回はFANUCのRoboGuideにあるNavigator機能を使用し、より簡単にロボットのシミュレーションプロジェクトを作成します。
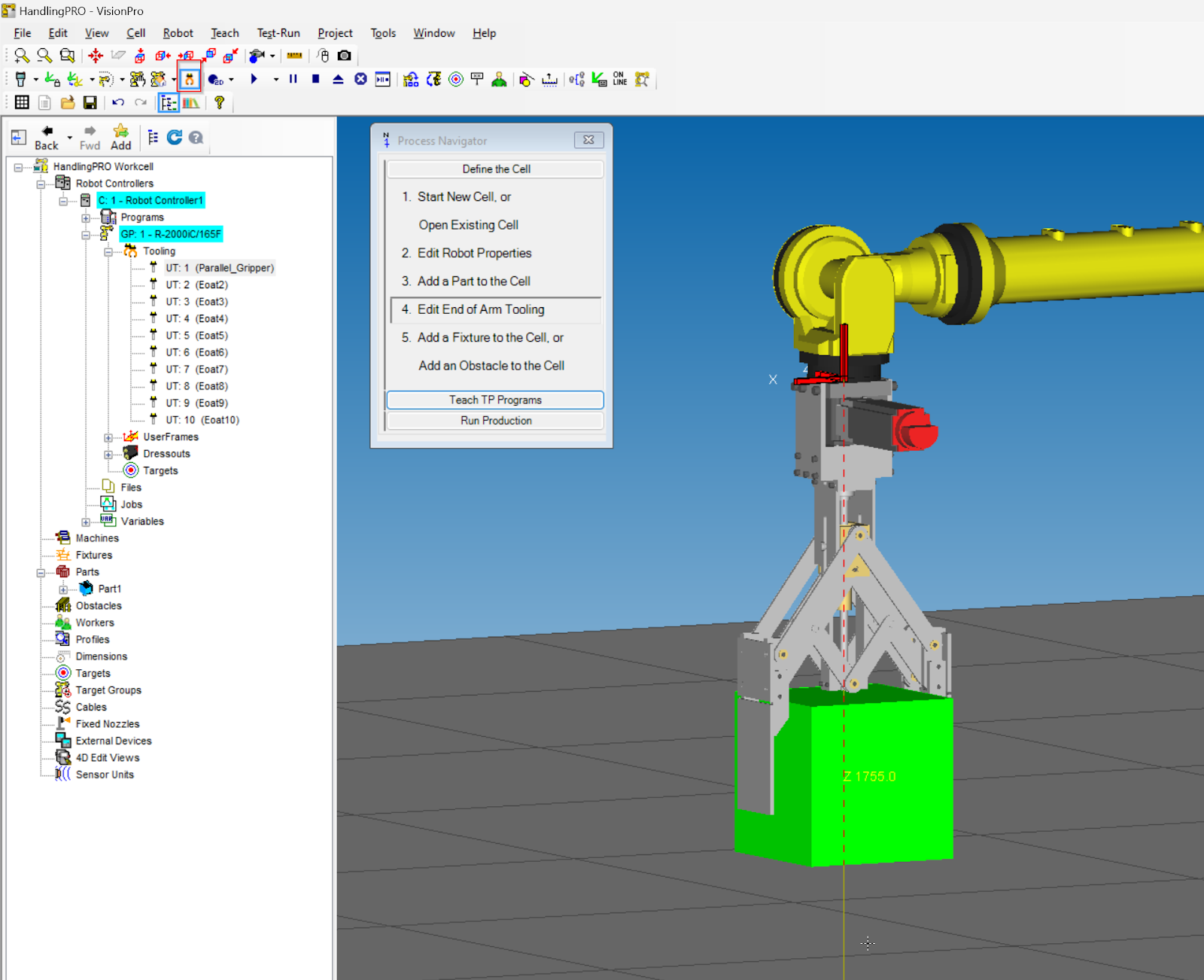
View>Navigatorをクリックします。
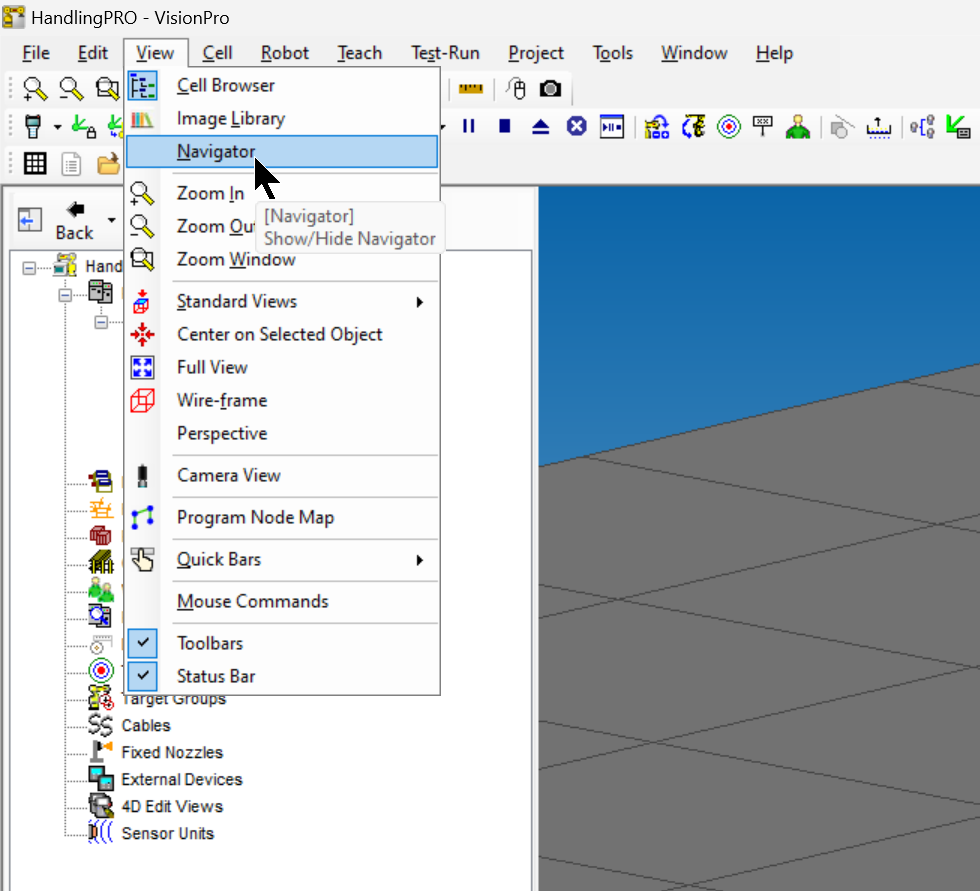
Porcess Navigtorが表示され、実際ロボットアプリケーション作成を終わるまでに必要なステップが表示されます。
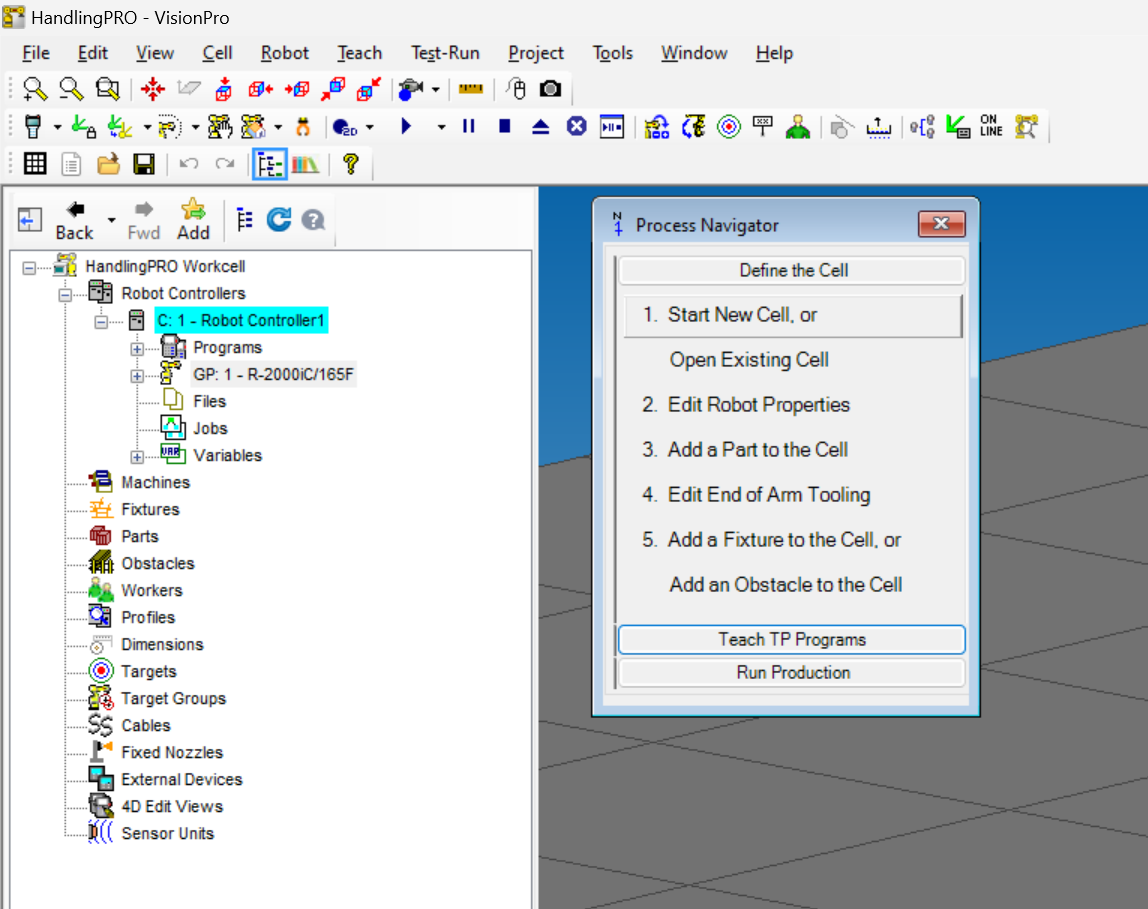
Edit Robot Properties
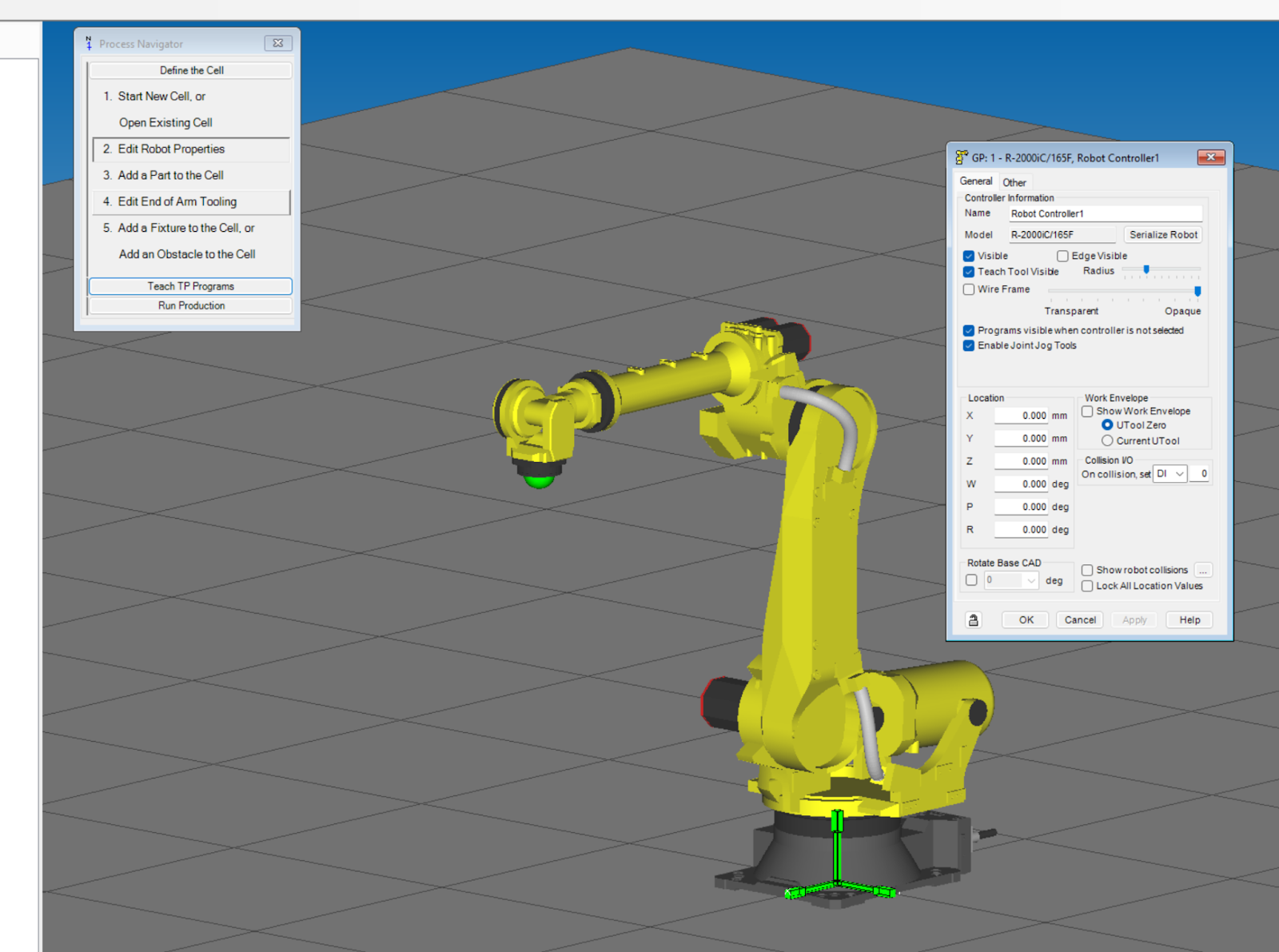
はじめてロボットのプロパティーを設定するため、”Edit Robot Properties”をクリックします。
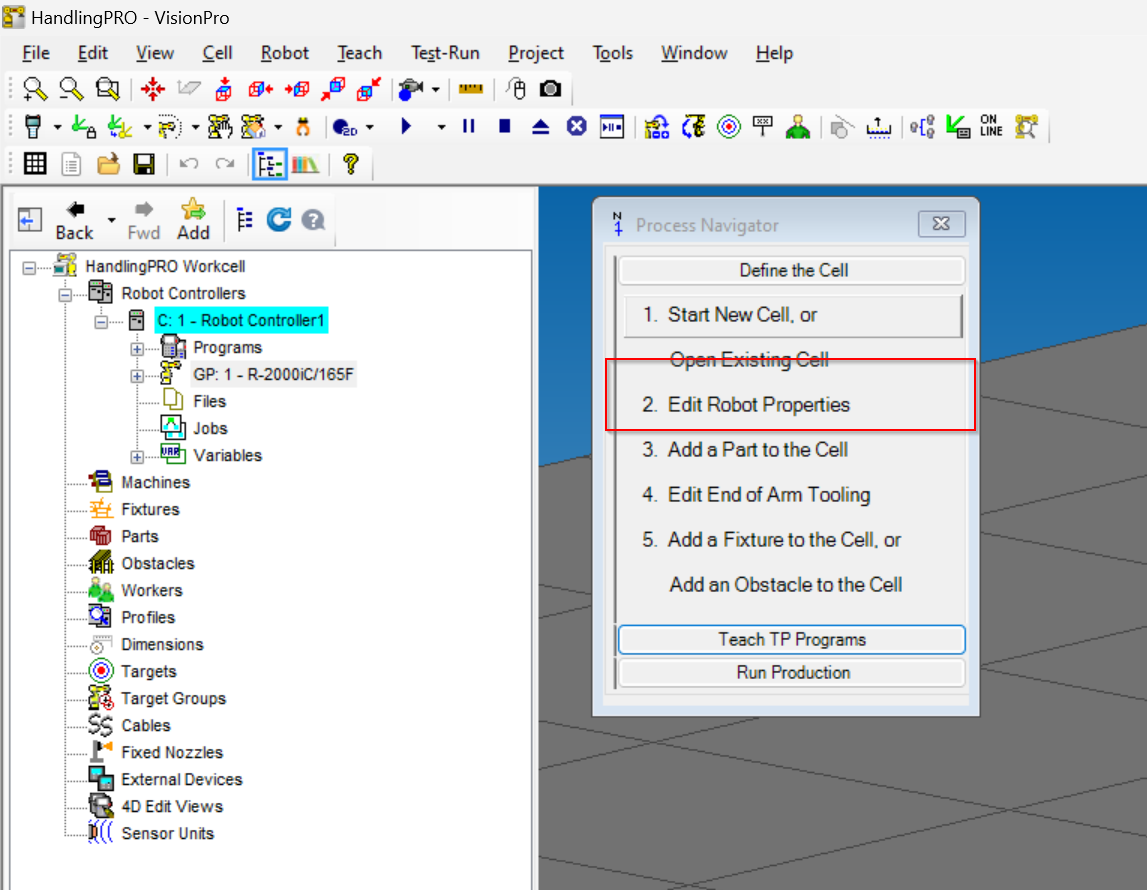
ロボットのプロパティ設定画面が表示されます。
Add Part into Cell
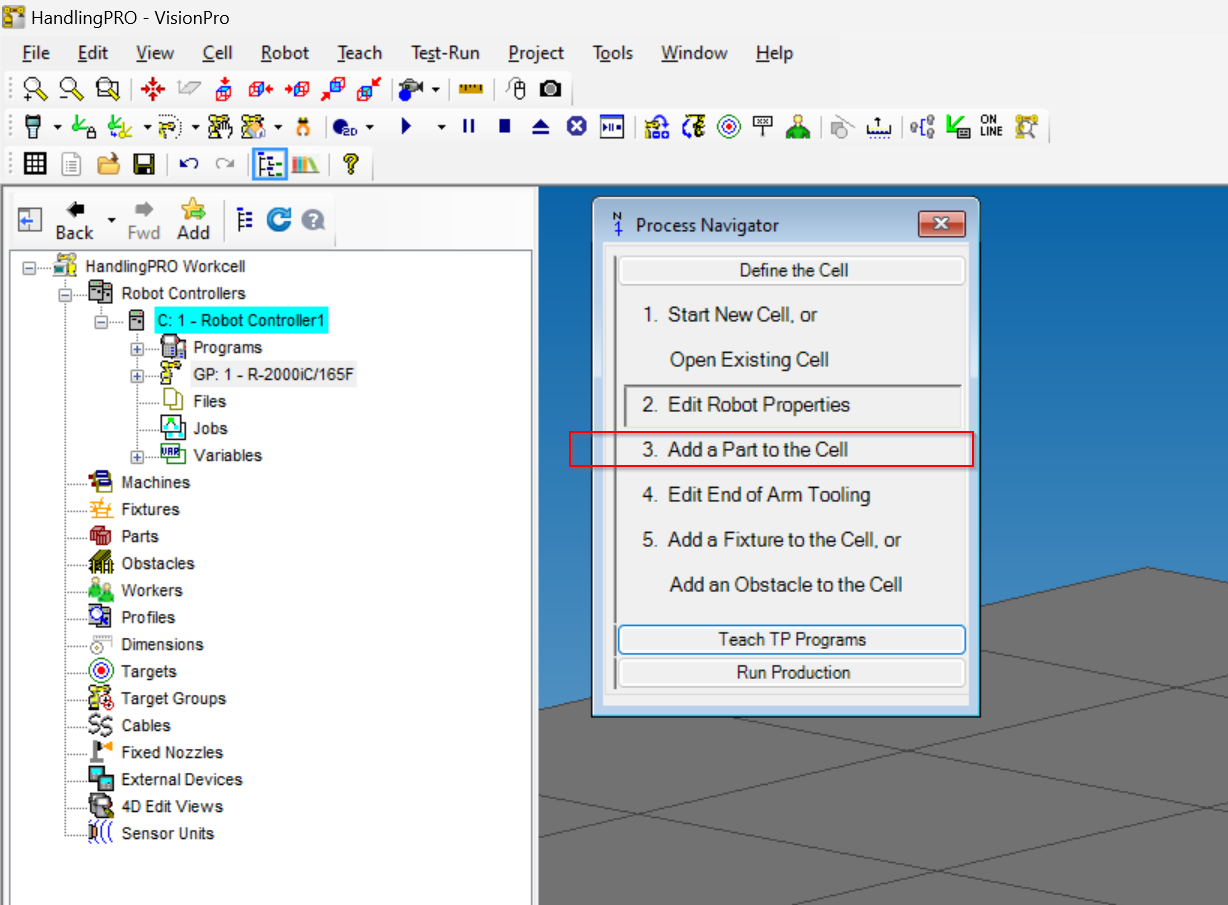
今回の記事ではPick and Placeのアプリケーションを作るので、Partsを生成するために、”Add a Part to Cell”をクリックします。
また、RoboGuide上でPartsの作成方法やコンセプトを詳しく知りたい方はこの記事を参考にしてください。
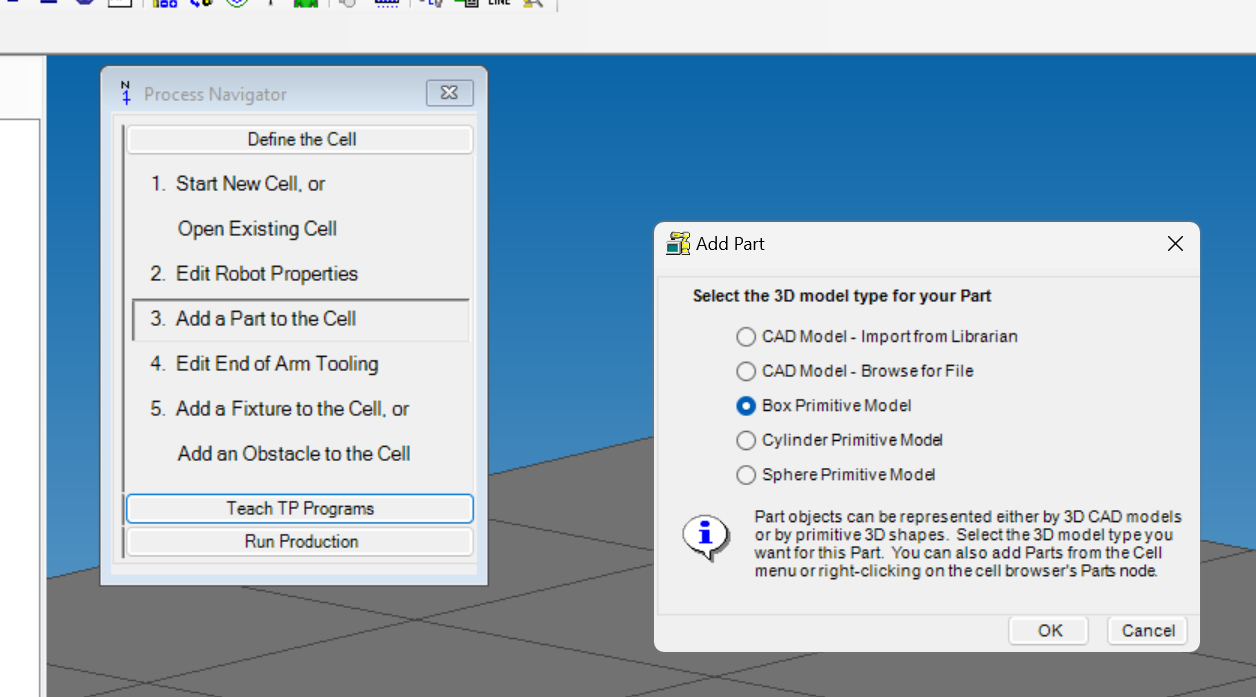
RoboGuideではCAD FileからPartsをImportできますが、今回の記事では簡単なBoxだけにします。なので、”Box Primitive Model”を選び>OKですすみましょう。
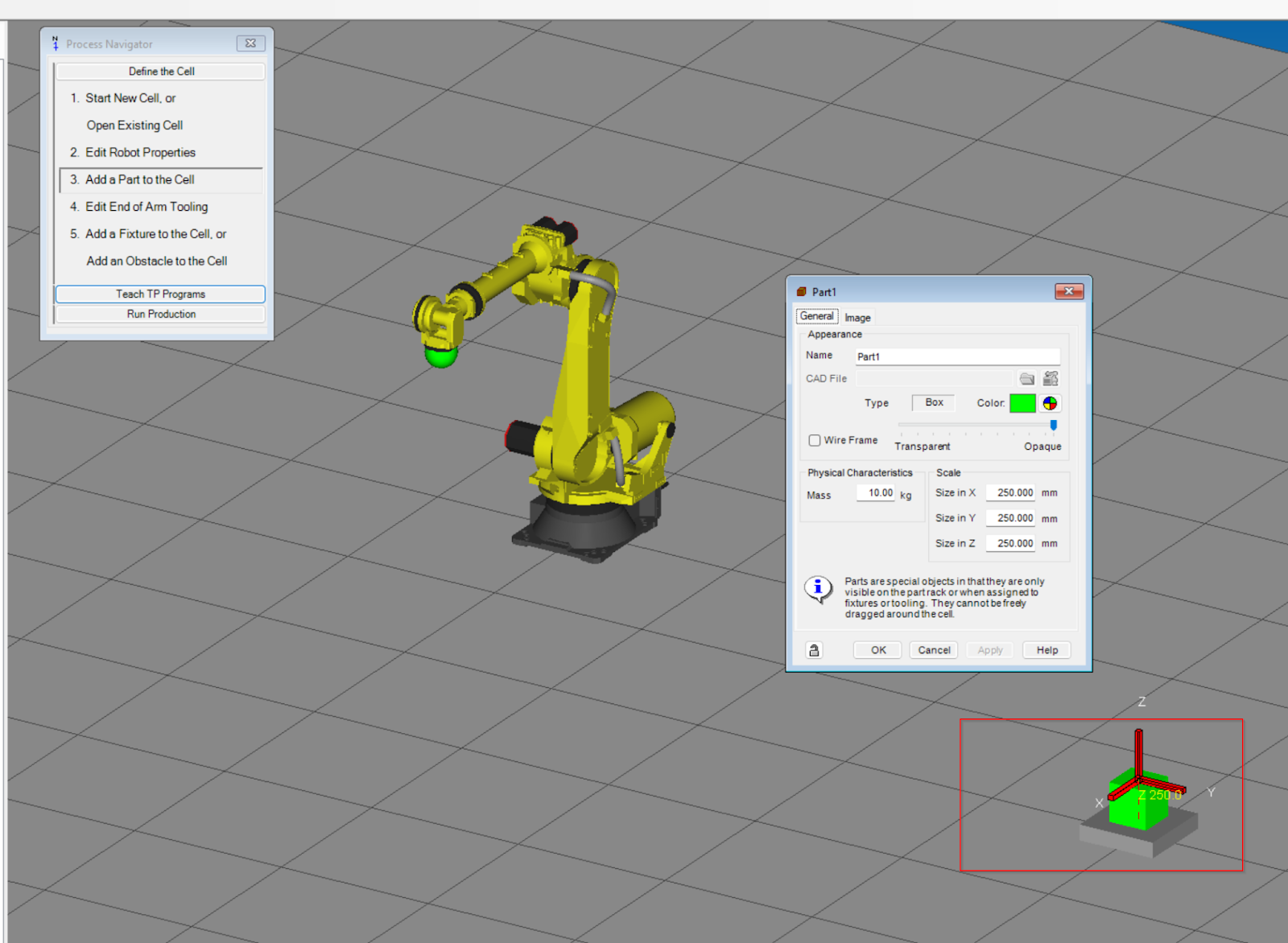
Done!RoboGuideプロジェクトに小さなBoが追加されました。
Tools
次はロボットにツールを追加するため、”Edit End of Arm Tooling”をクリックします。
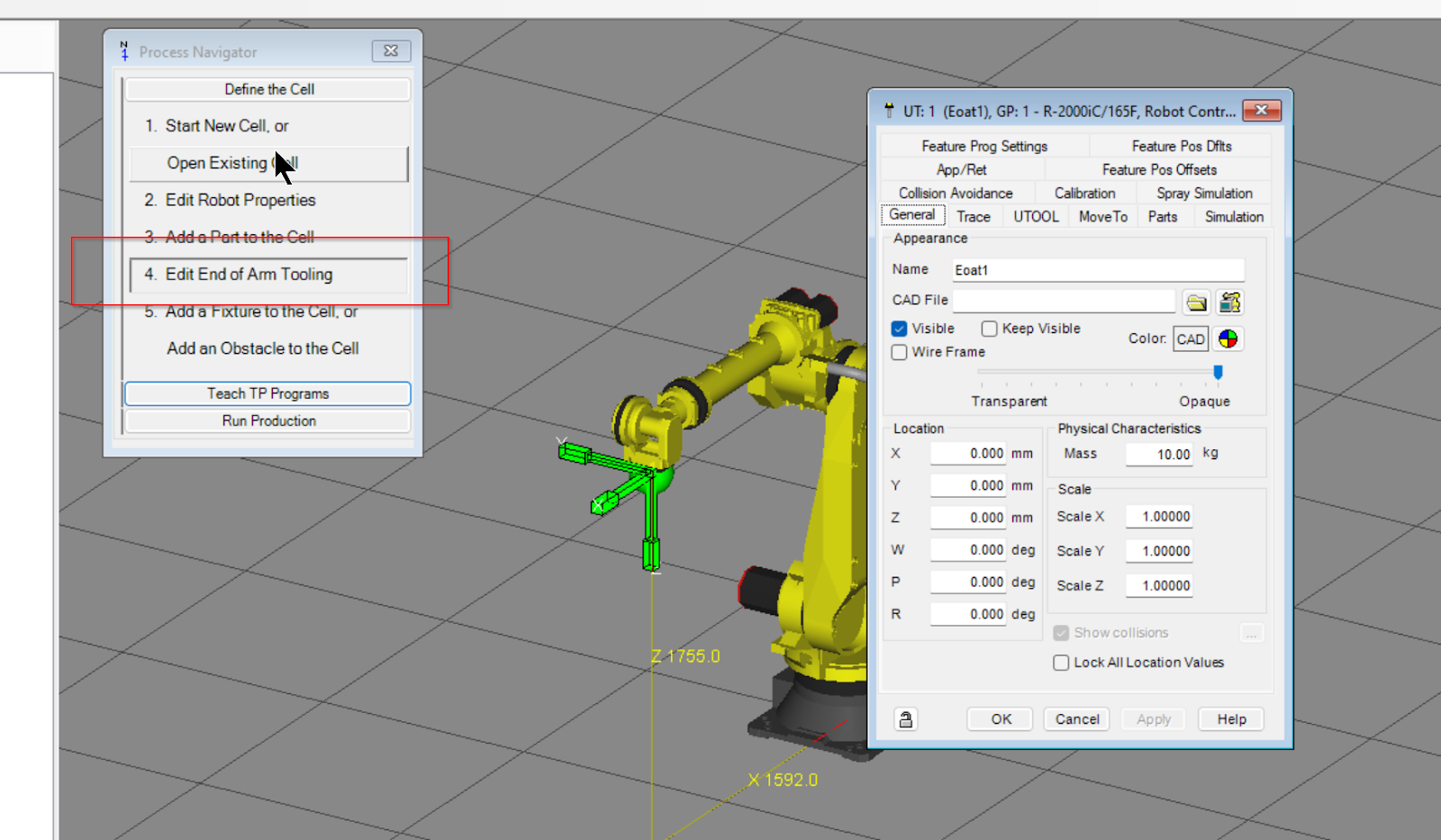
また、RoboGuide上でツールの追加方法やコンセプトを詳しく知りたい方はこの記事を参考にしてください。
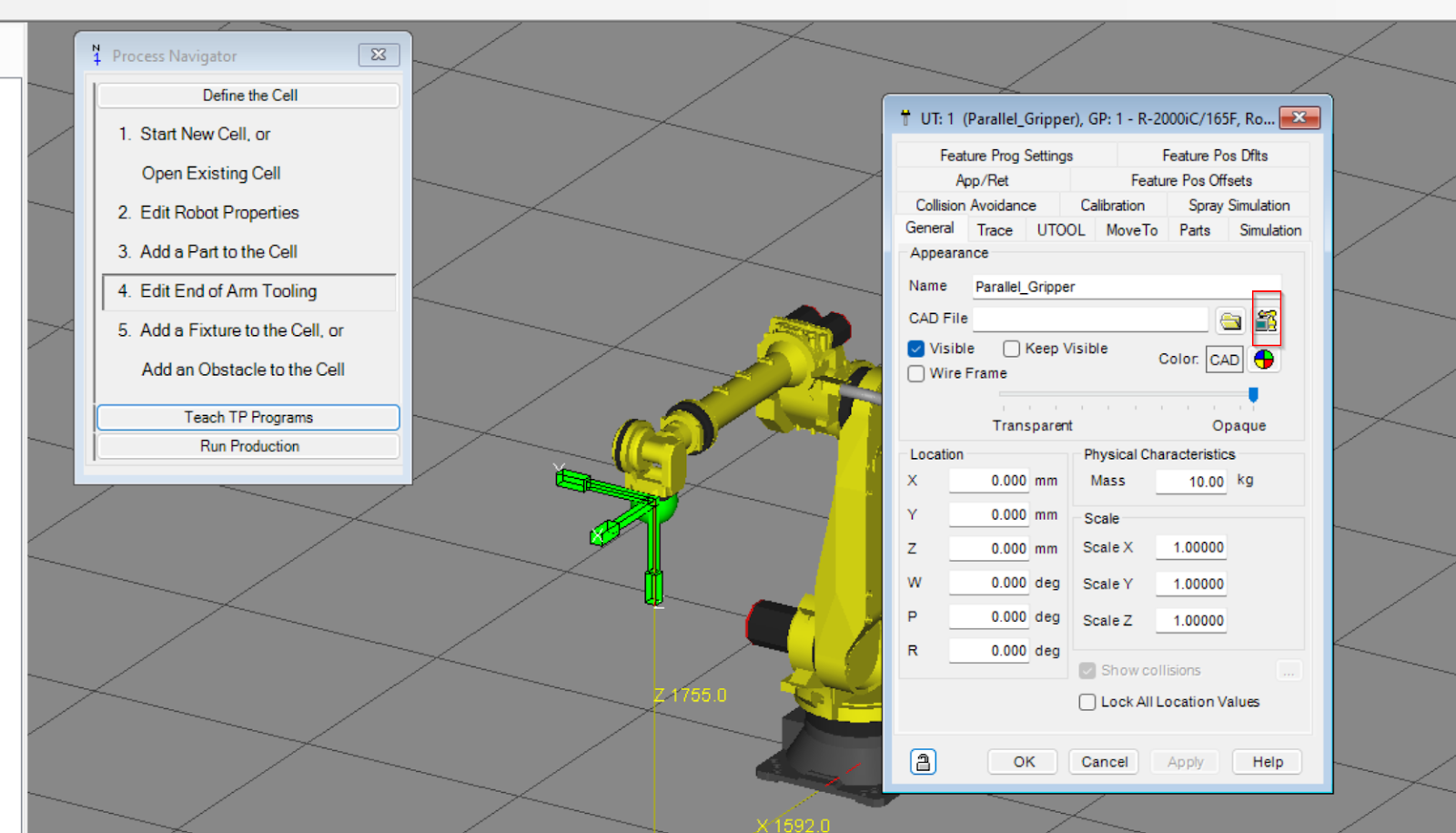
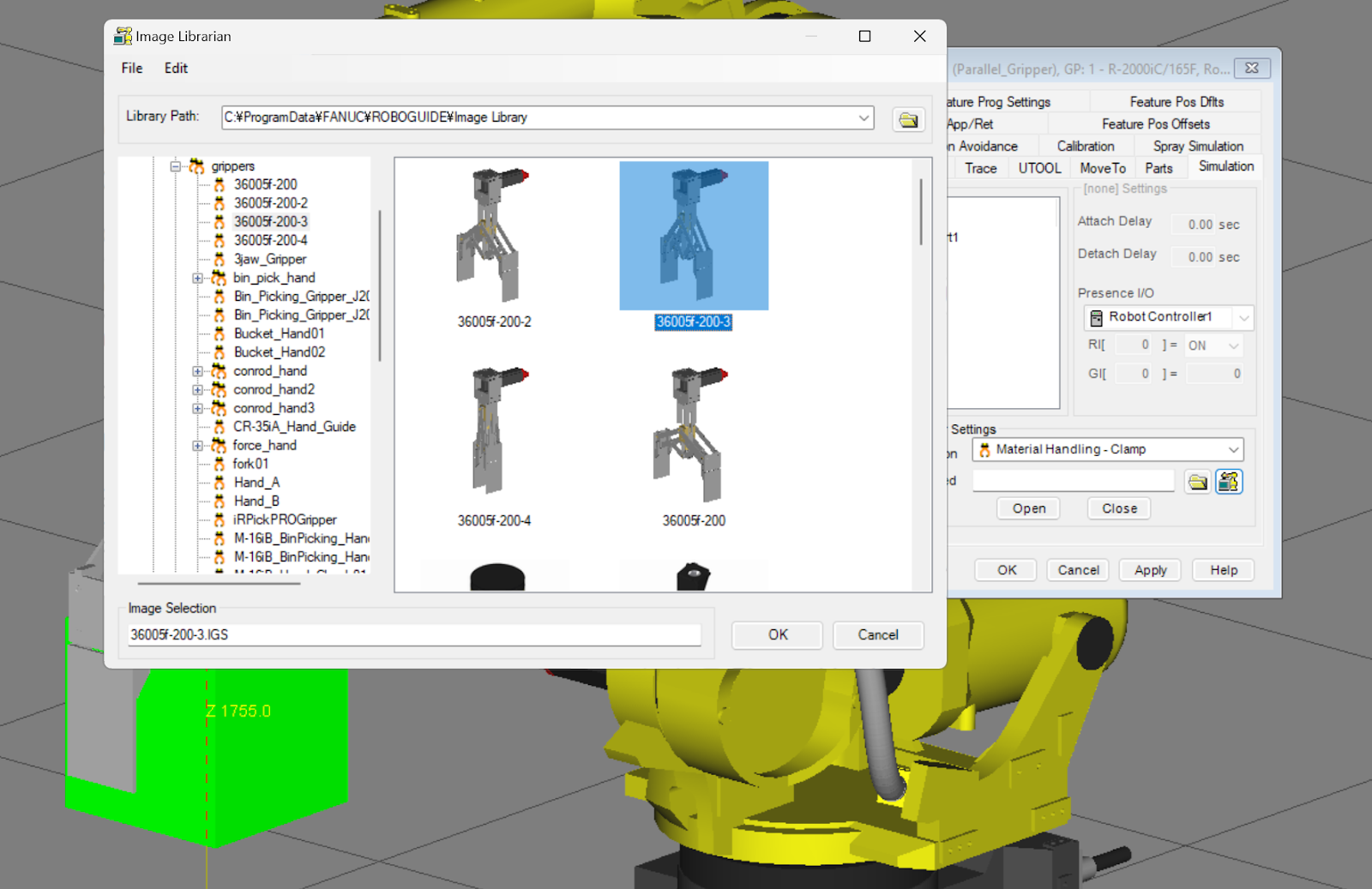
CAD Files
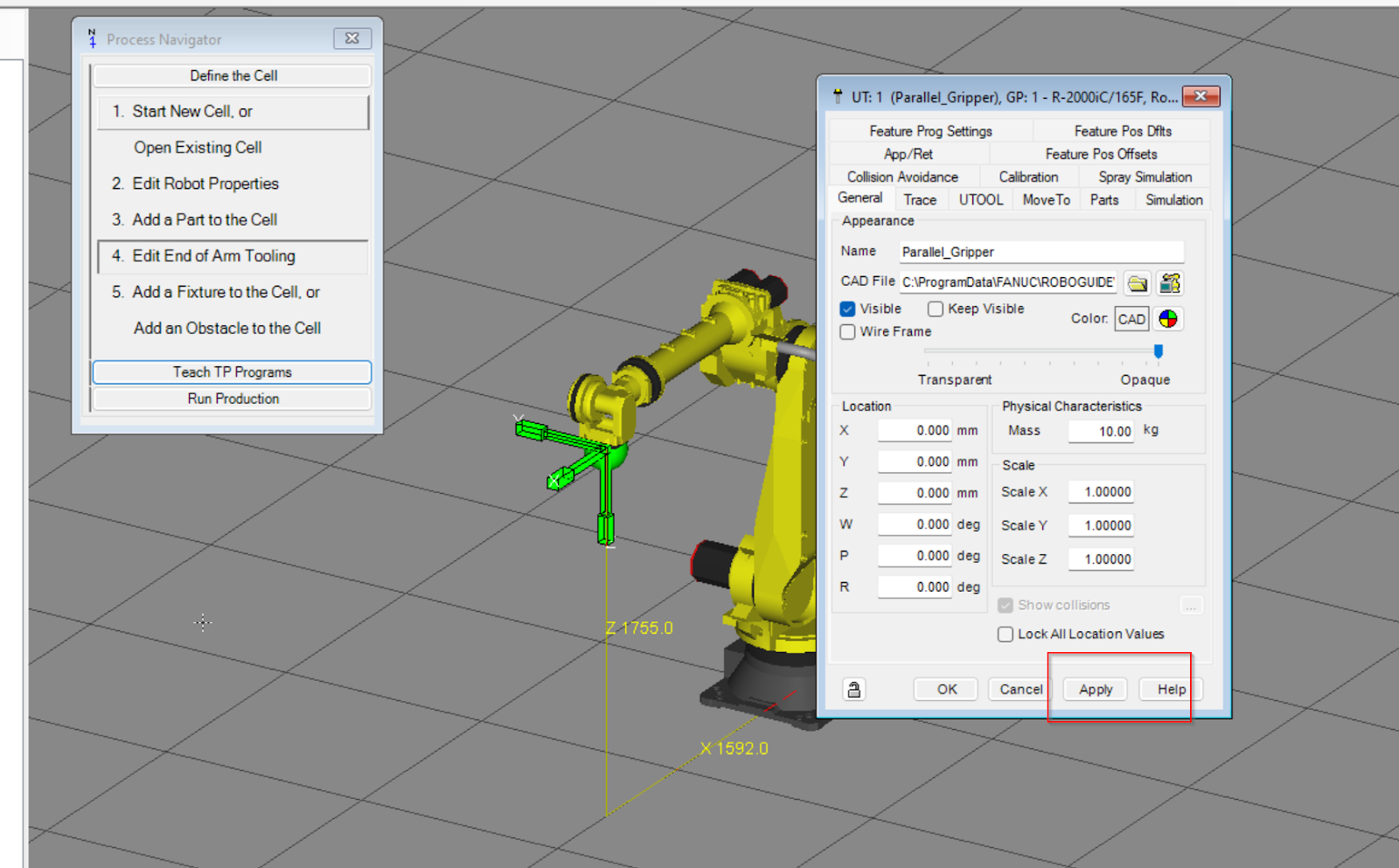
赤枠のアイコンでCAD Fileを利用しツールを追加します。
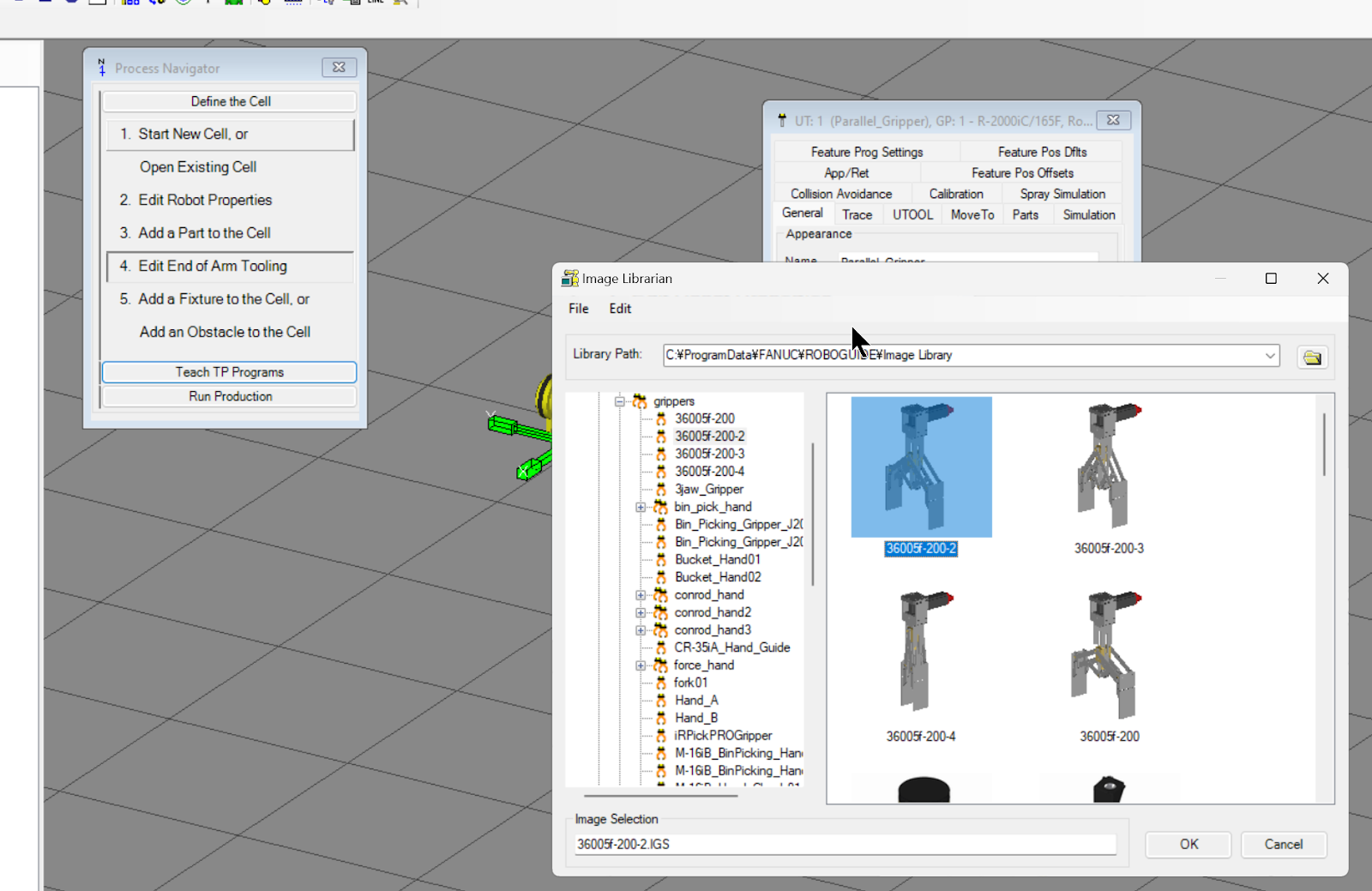
RoboGuideには様々なCAD Fileをすでに用意されています。
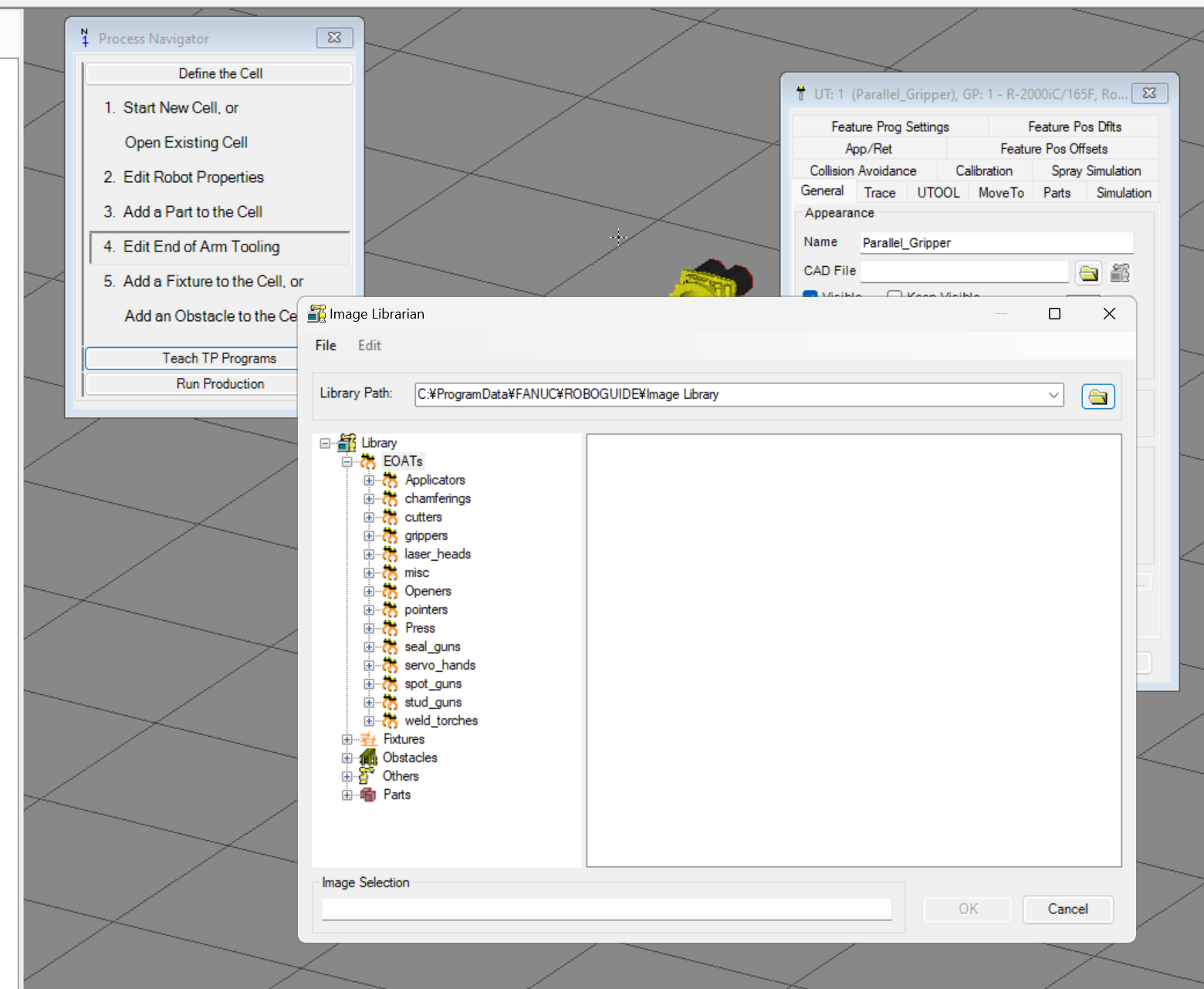
今回の記事ではそのGripperを使用します。
Applyボタンをクリックし設定を適用しましょう。
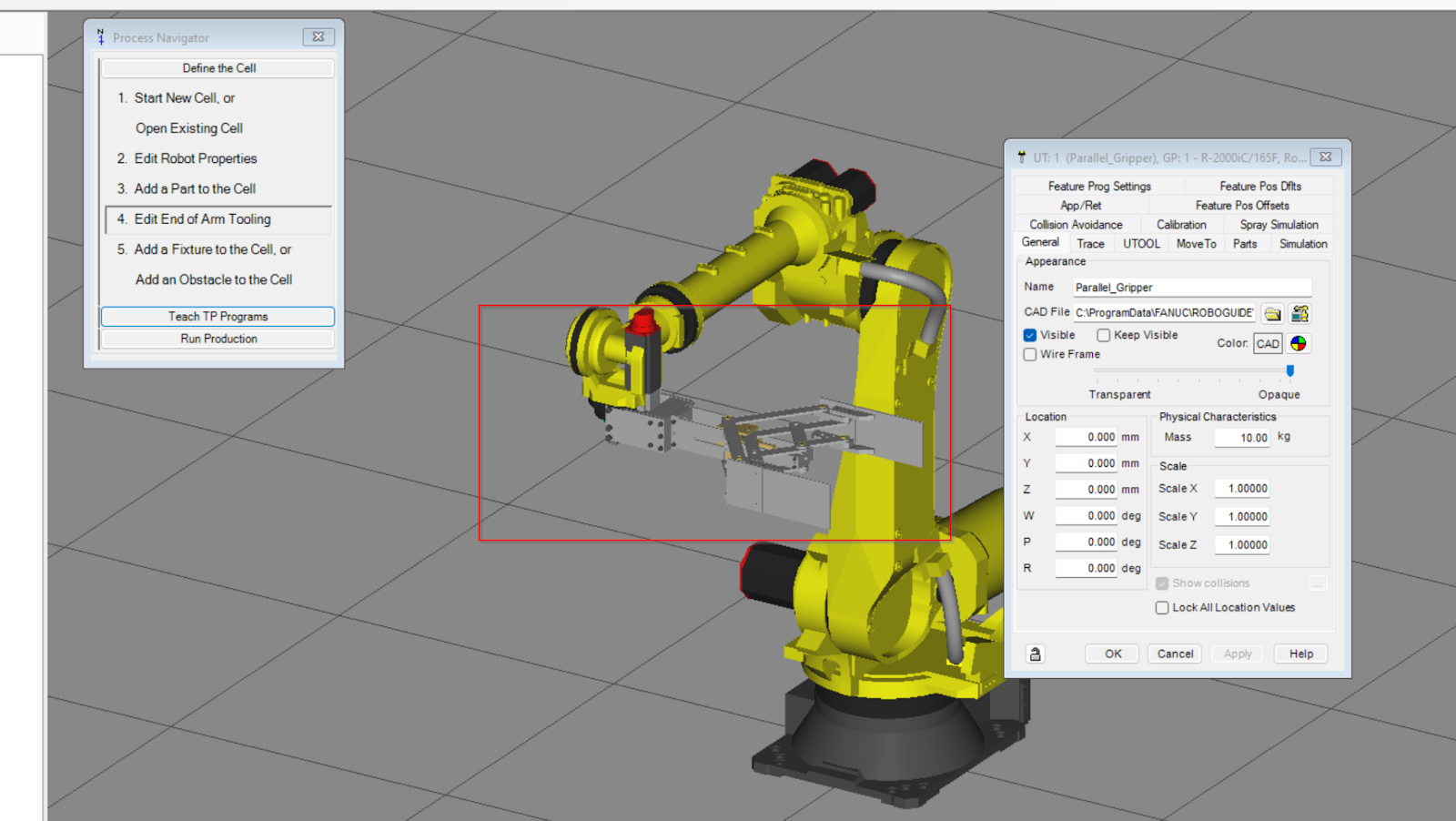
Done!ツールがロボットに取り付けられました。
Lock the Location
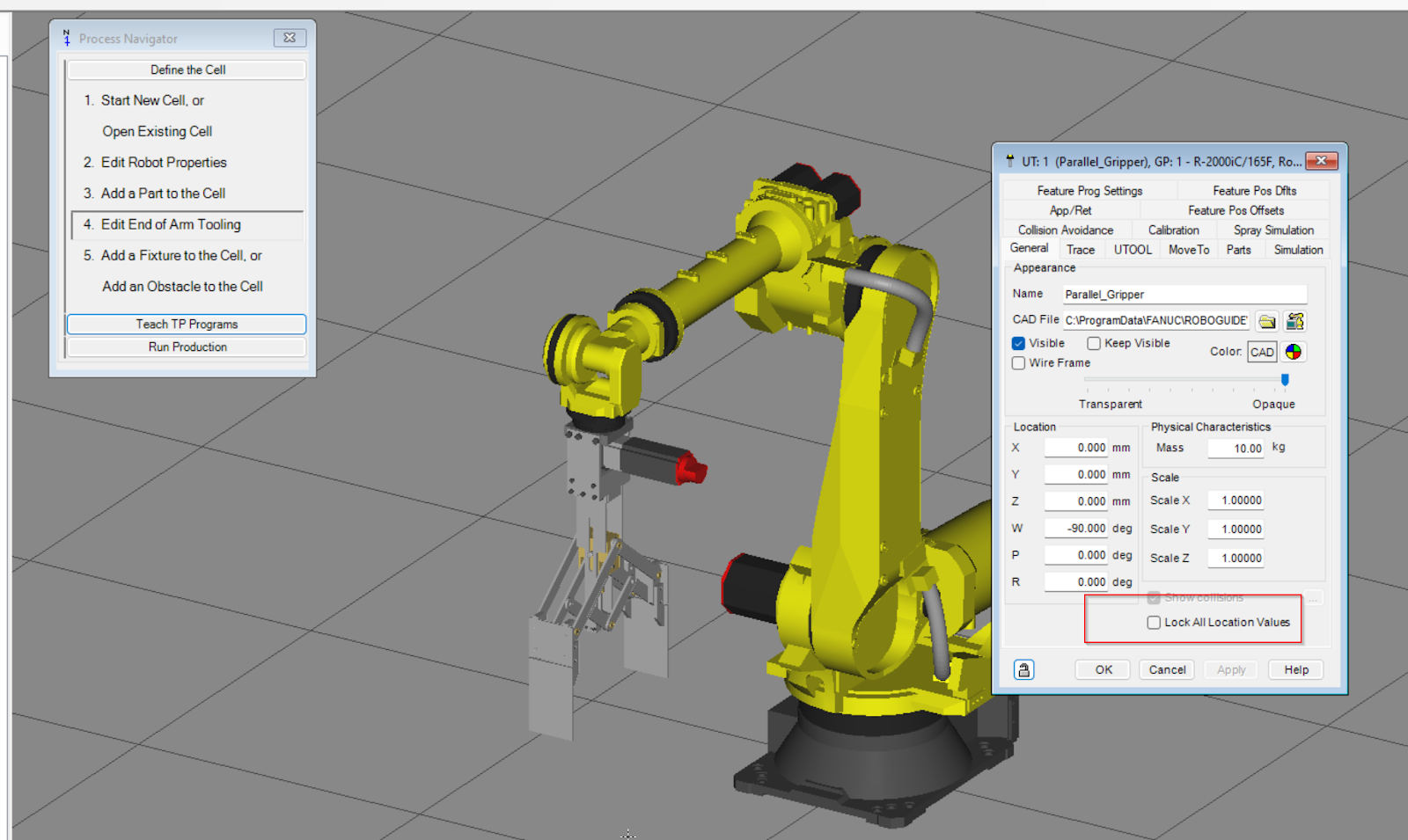
ツールの取り付け方向をLocation項目で調整し、”Lock All Location Value”のCheck入れてツール位置を変更できないようにしましょう。
TCP
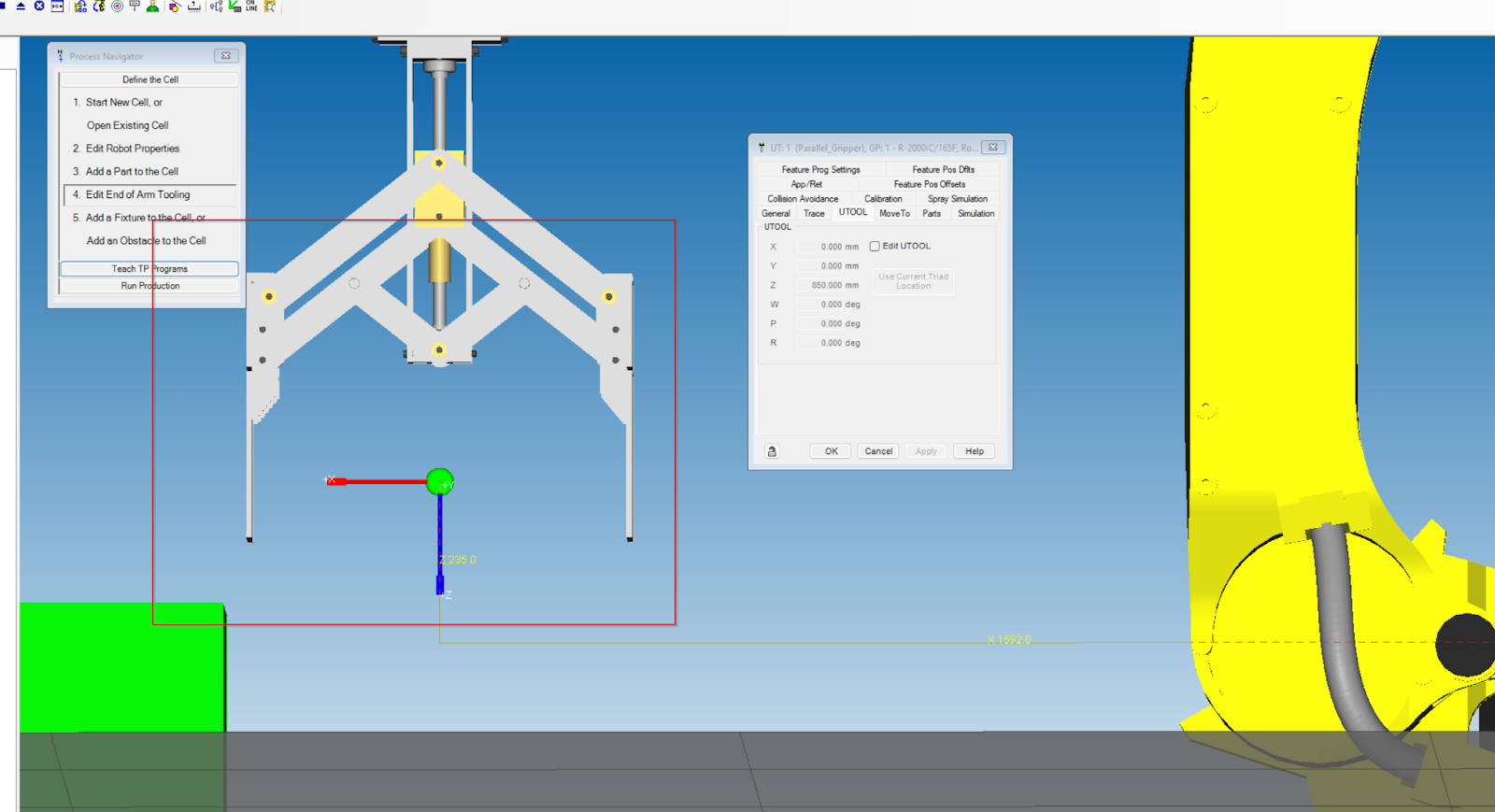
ツール座標を調整するためにUTOOL Tabをクリックします。
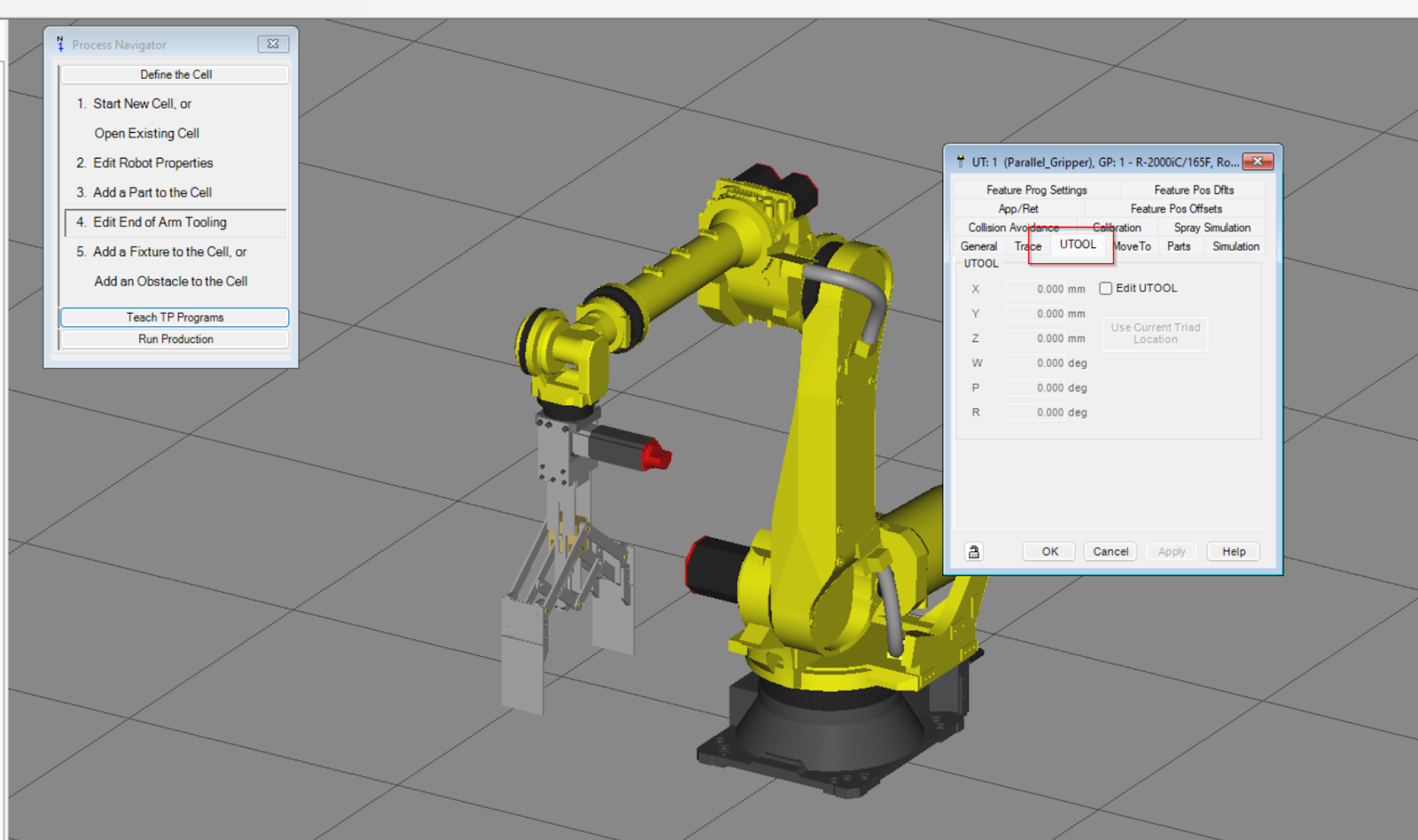
TCPをツールの中心点に設定しましょう。
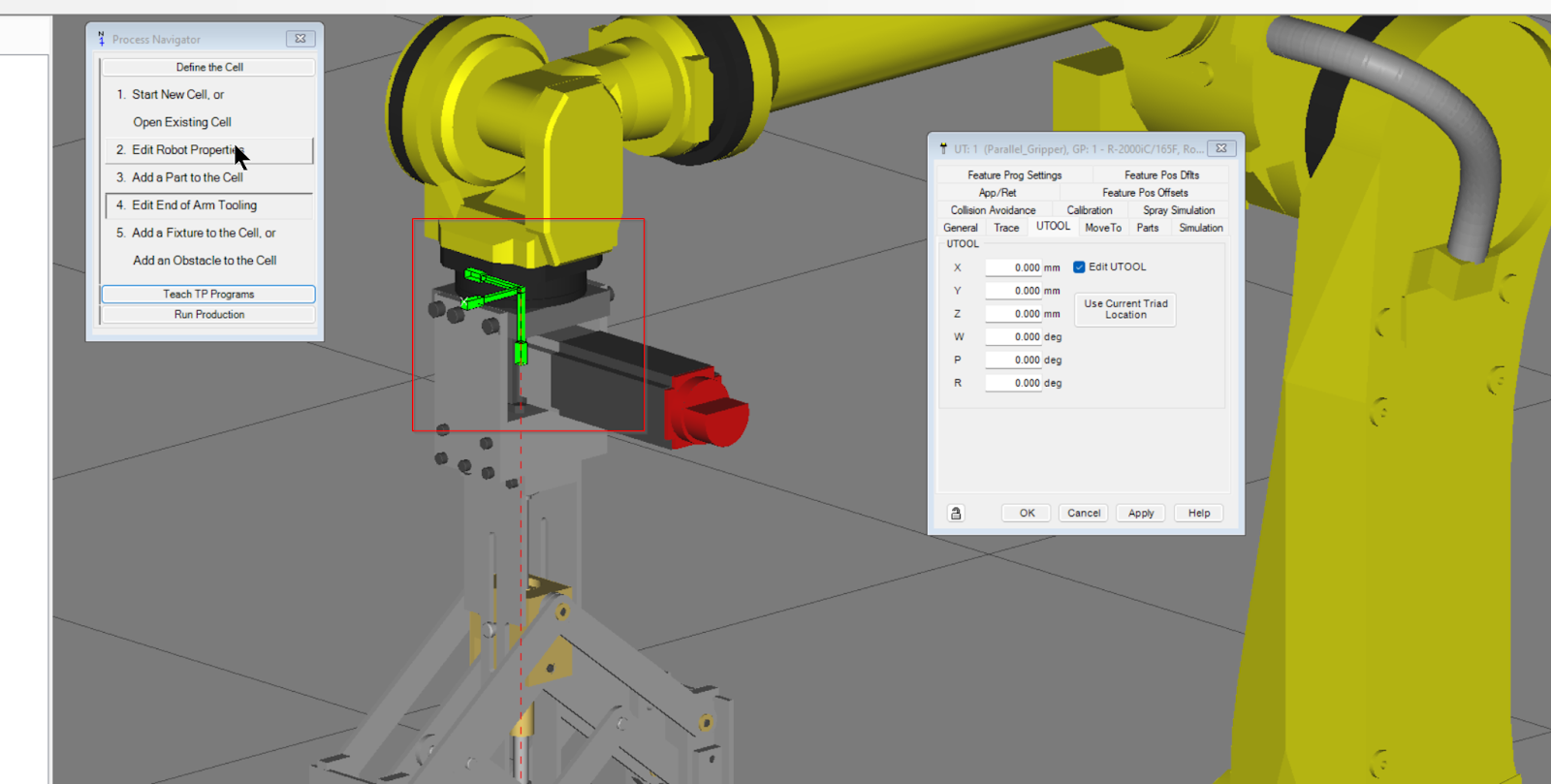
Done!
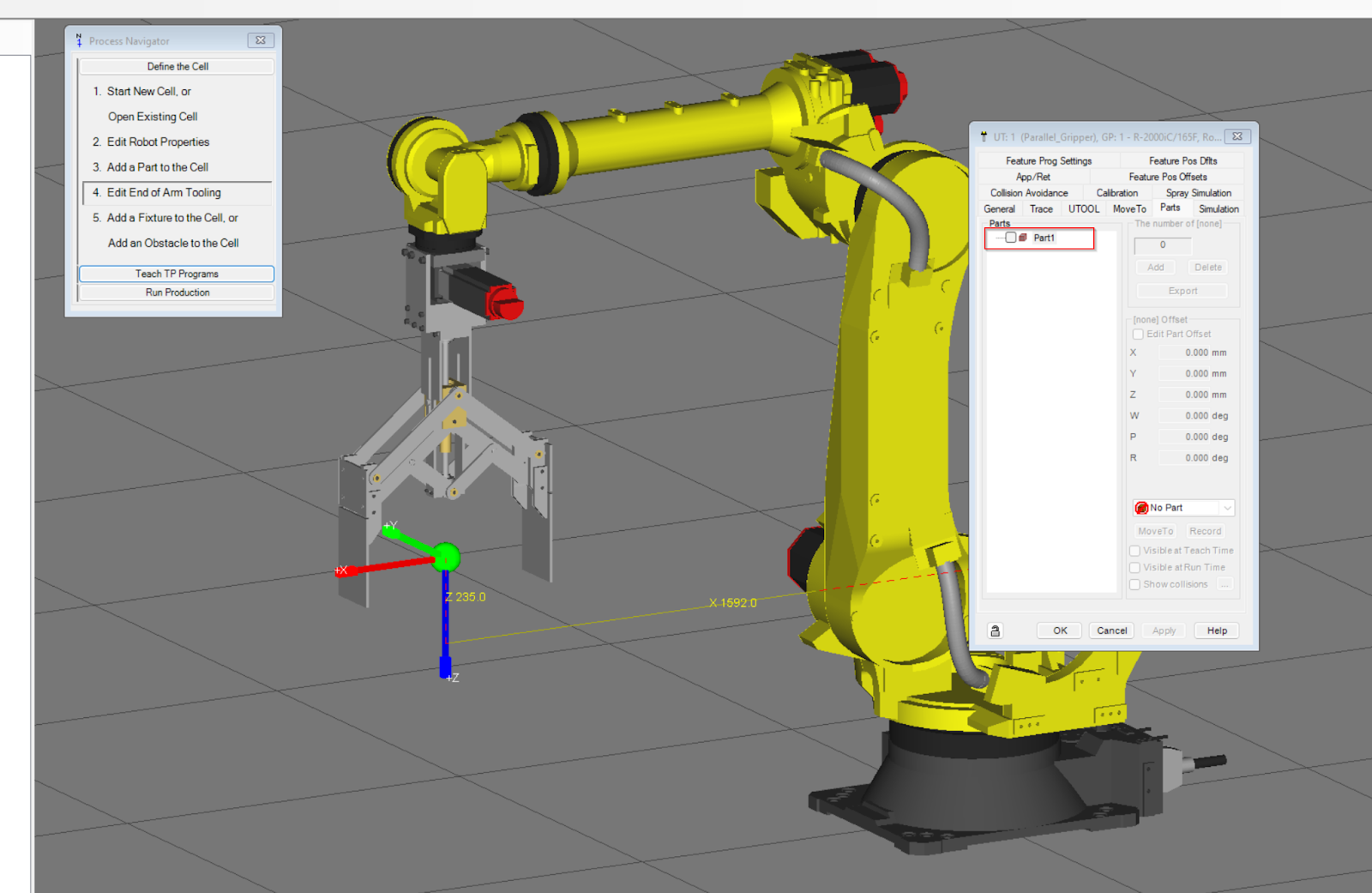
Parts
GripperをParts(今回の記事ではただのBoxで)の掴む動作を設定するため、PartsにあるParts部品をCheck入れます。
Done!GripperにBoxが表示されました。
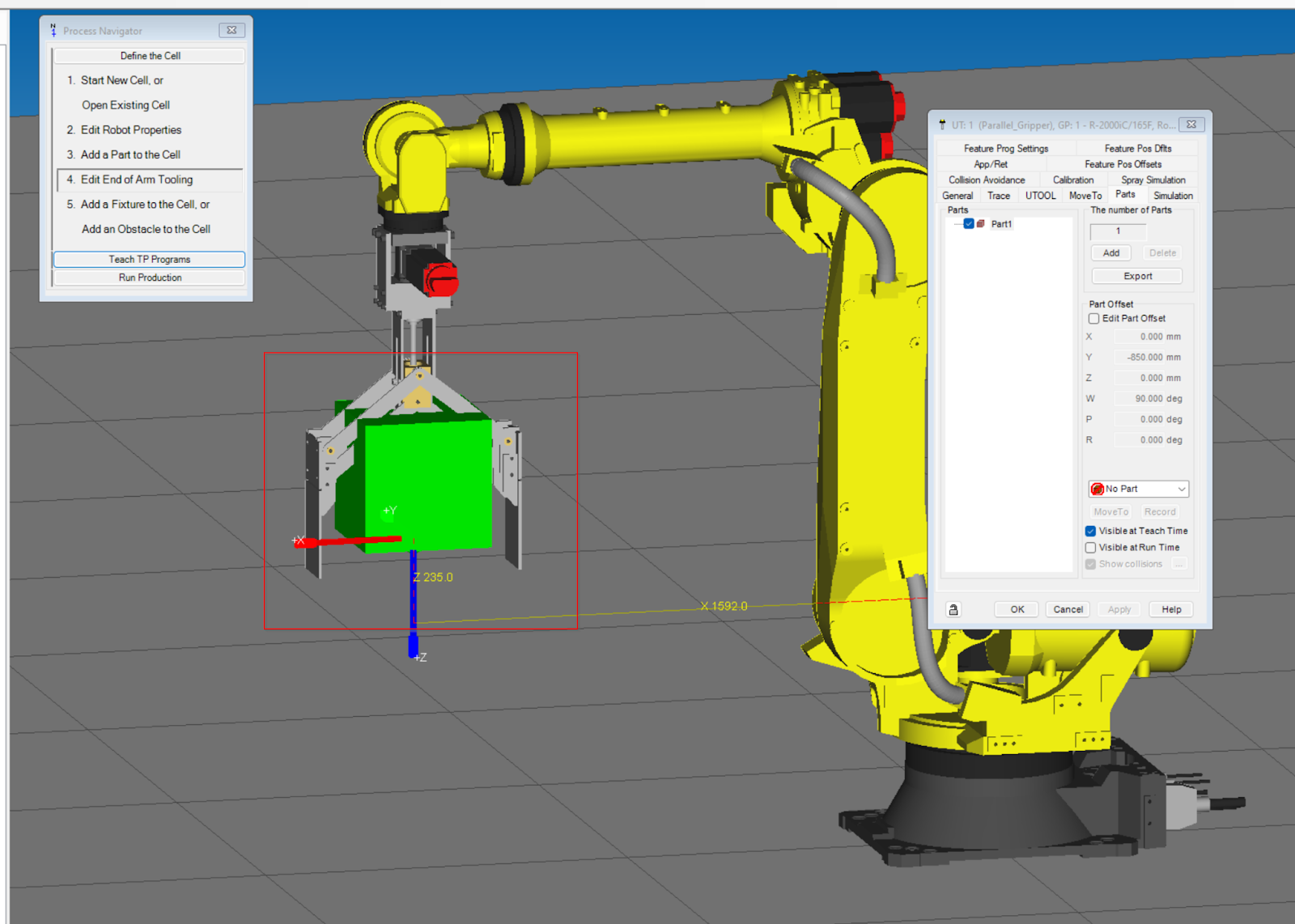
Boxの場所を調整してください。
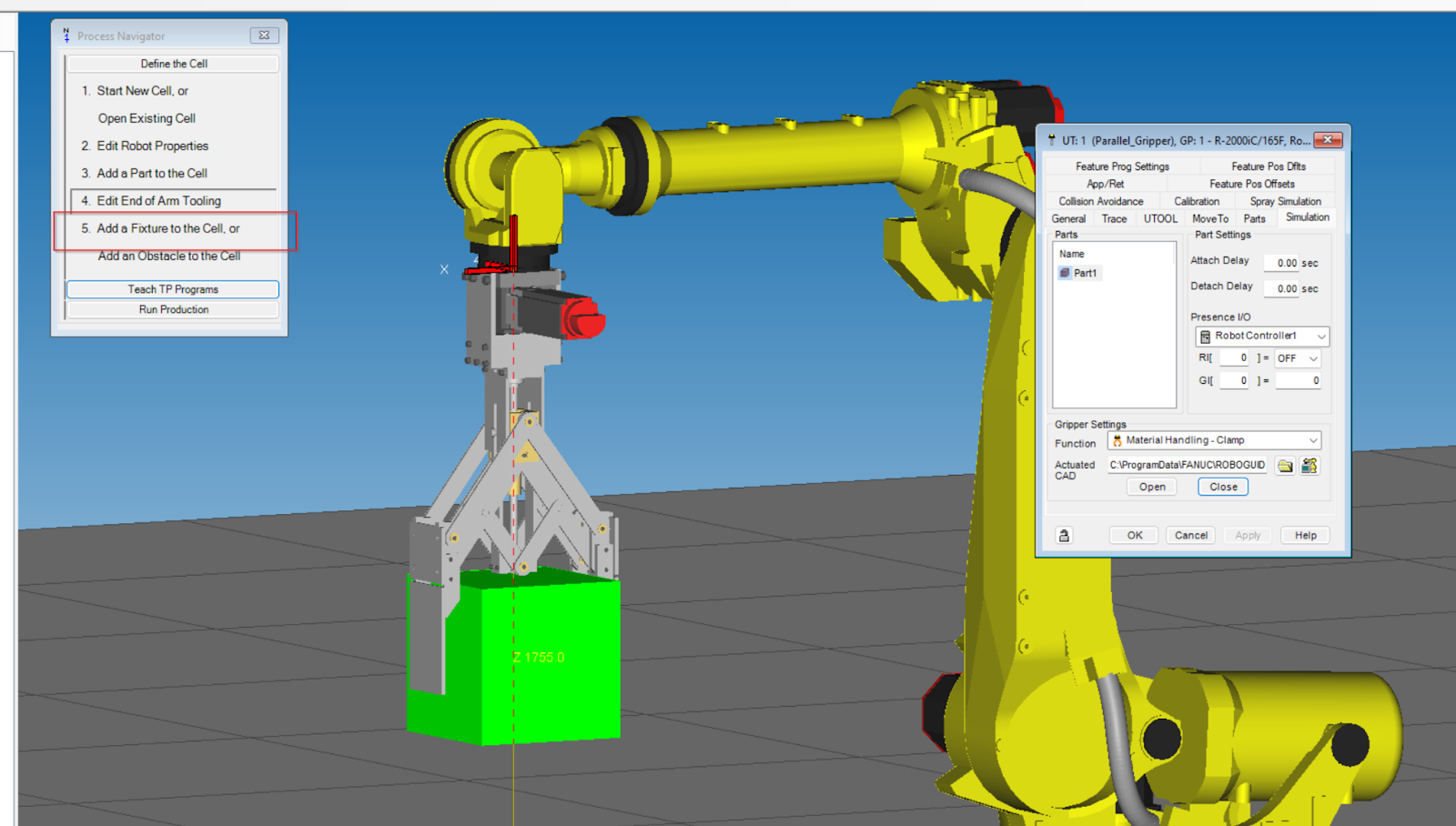
Simulation
最後はSimulation TabでCellのシミュレーション設定を行います。
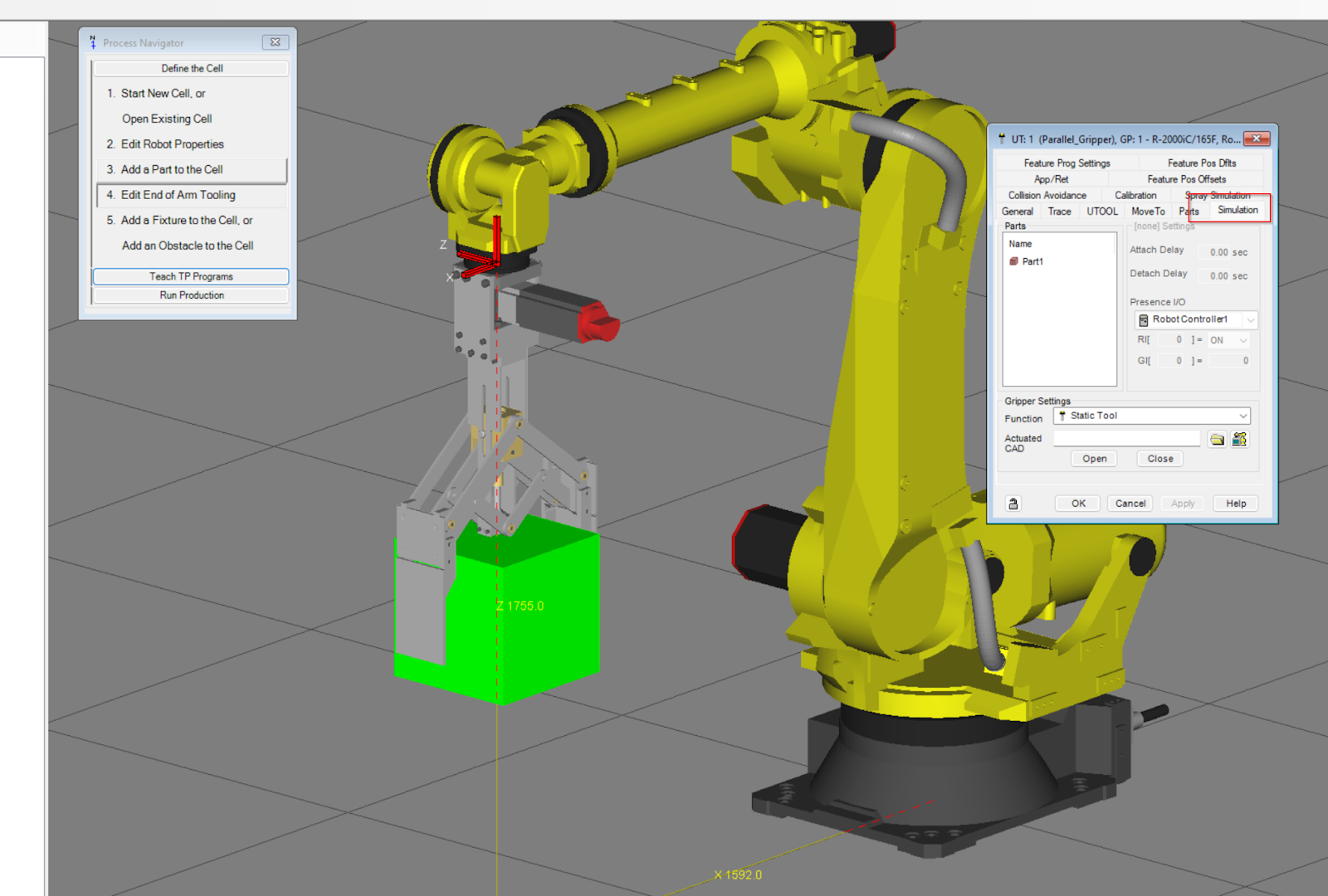
Gripper Setting
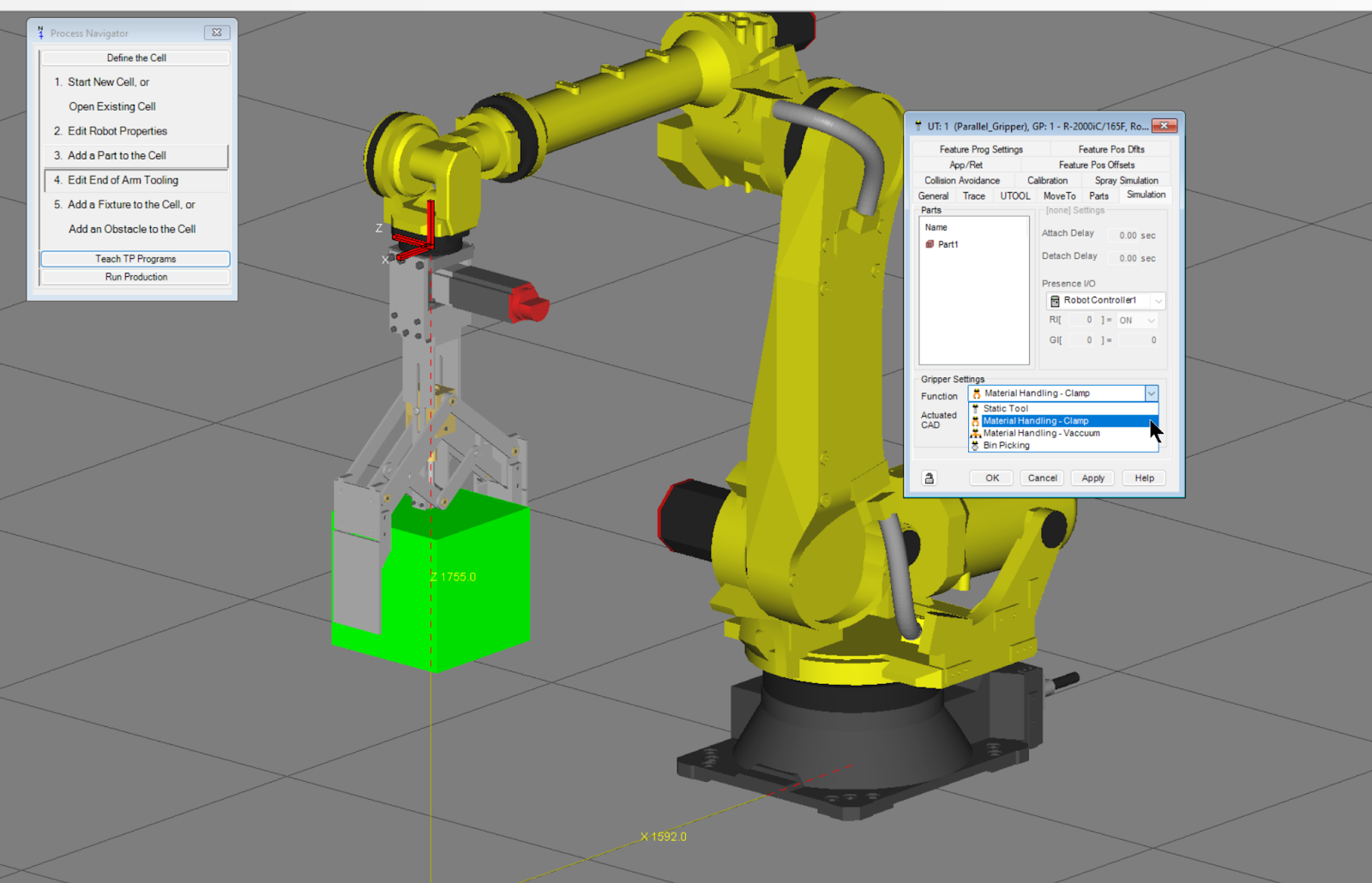
Function項目にMaterial Handling-Clampを設定します。
Actuated CADにGripperをクロスするときのCAD Fileを設定します。
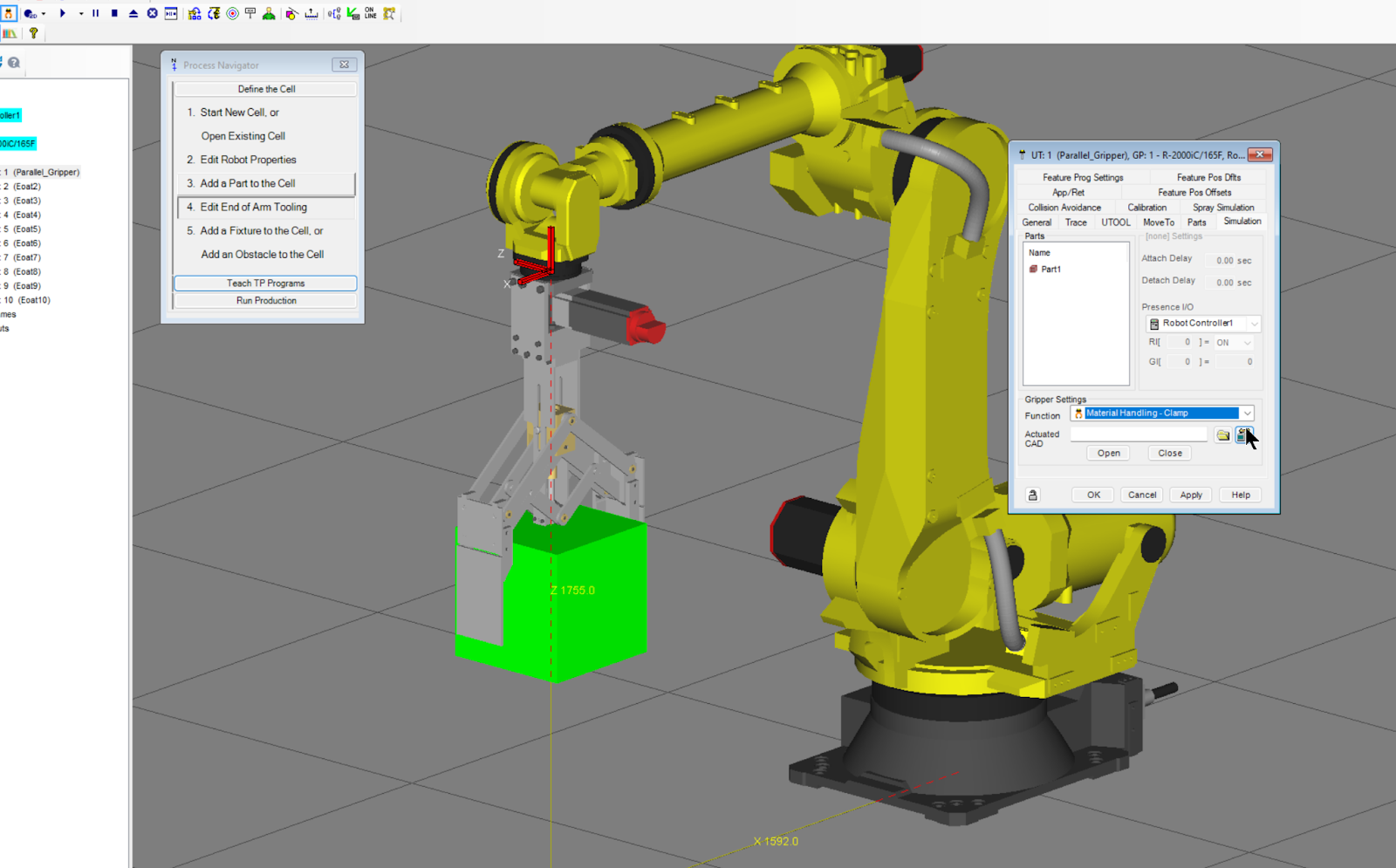
ライブラリからクロスしたGripperのCAD Fileを設定しましょう。
Done!次は赤枠のボタンでGripperの開閉動作を確認できます。
Test it!
Done!UTOOLにあるOpen Closeボタンを使用しGripperの開閉ができました。そしてGripperが開くときBoxも消えます。
先ほど言ってたの赤枠ボタンにも同じの開閉操作できます。
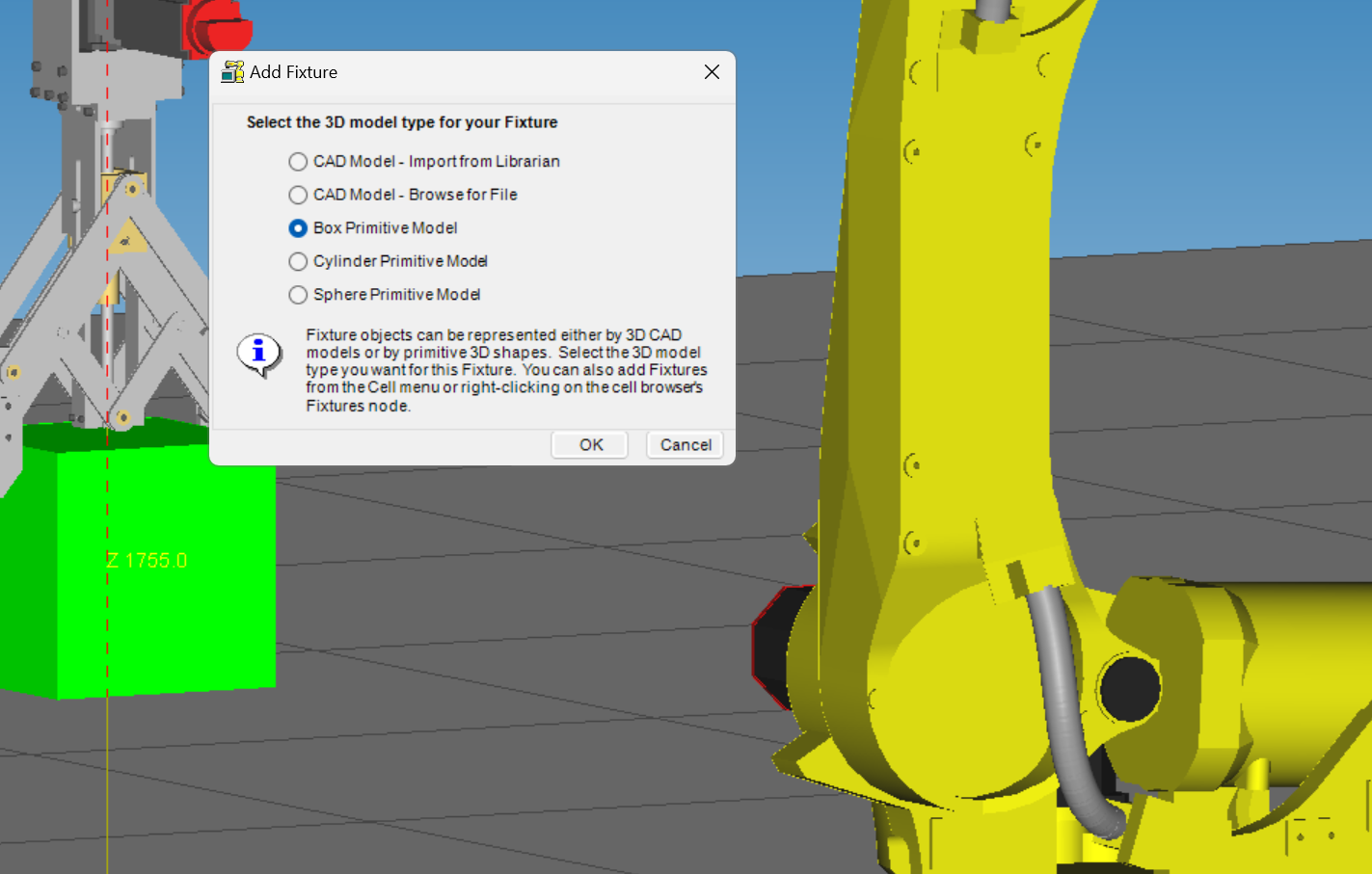
Adding Fixture
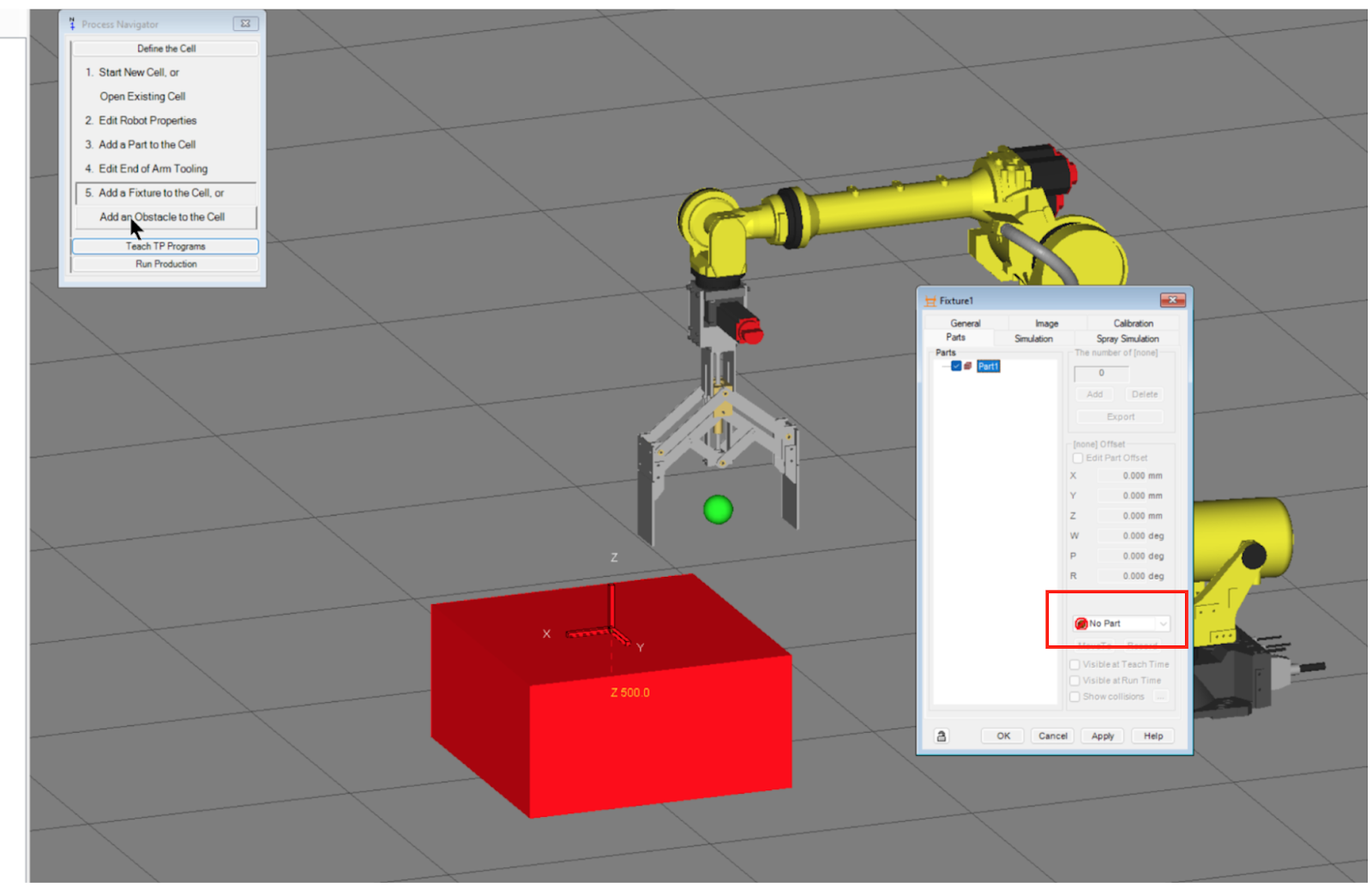
次はプロジェクトにFixtureを追加するため、”Add a Fixture to the Cell”をクリックします。
また、RoboGuide上でFixtureの作成方法やコンセプトを詳しく知りたい方はこの記事を参考にしてください。
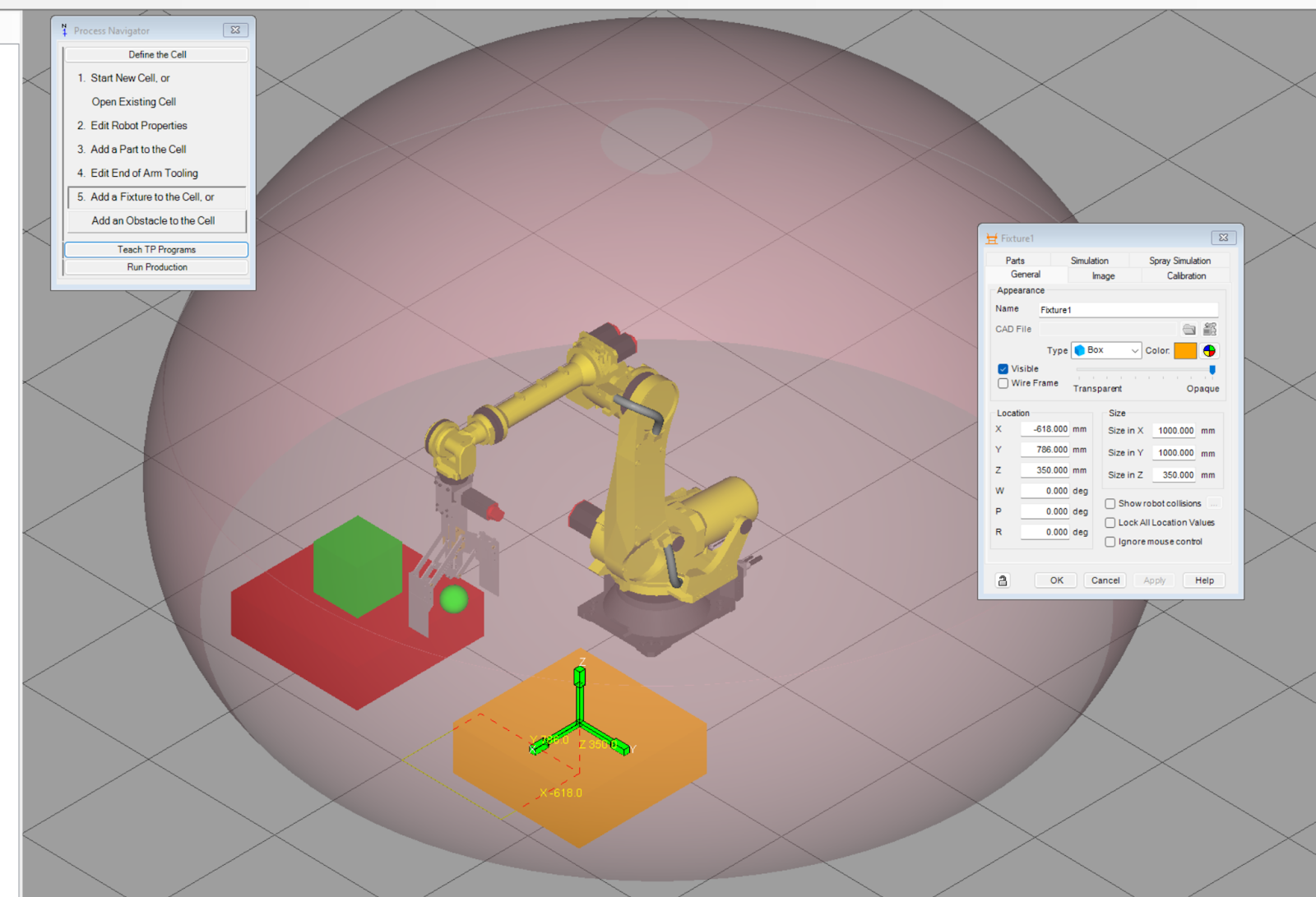
Box Primitive Modelを選び>Okで進みます。
Done!Fixtureが追加されました。
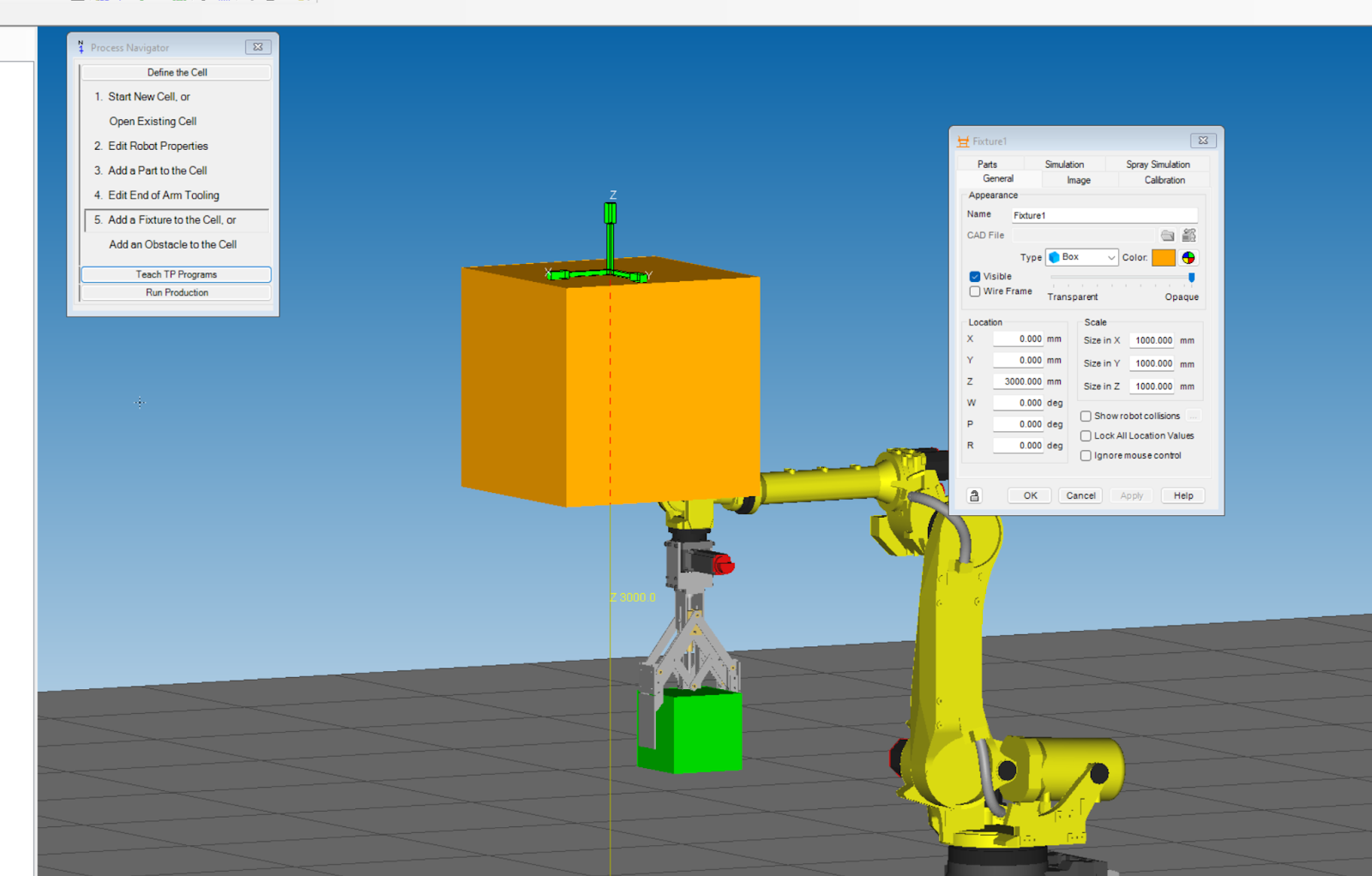
Fixtureの位置を調整します。
Add Parts on the Fixture
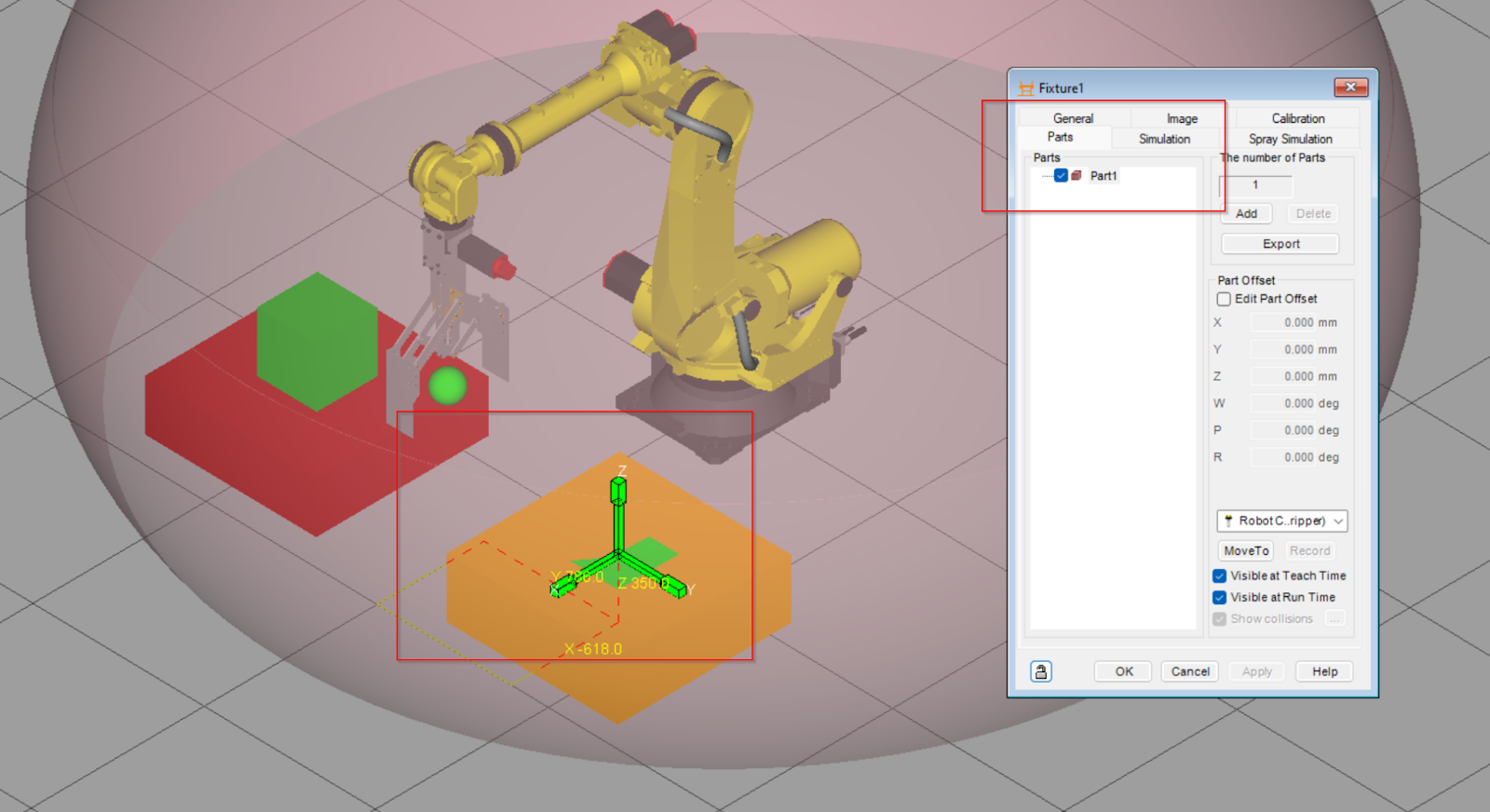
次はPartsを先程追加したFixtureの上に乗せたいので、PartのDrop-Listから必要なPartsを設定しましょう。
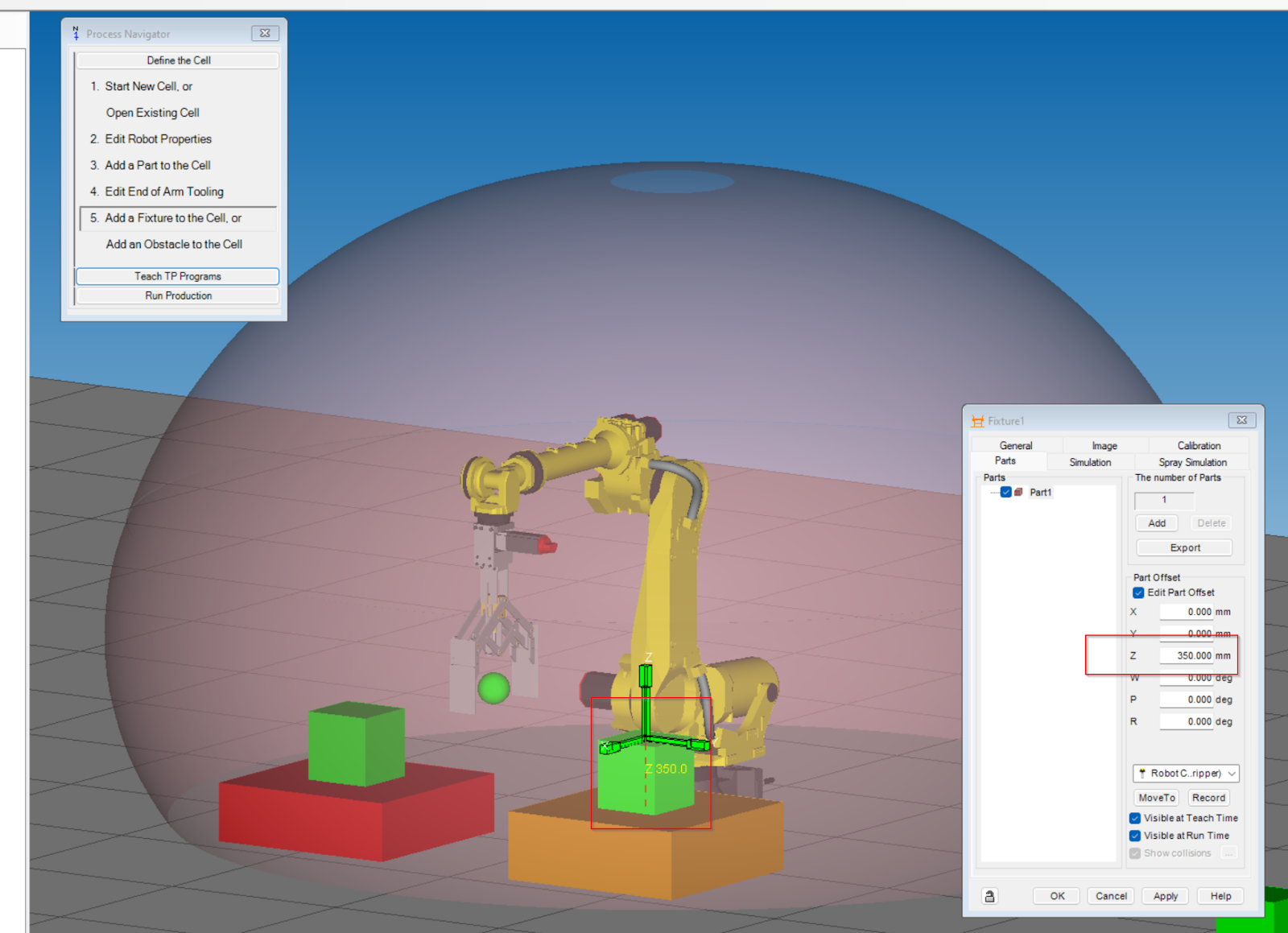
Done!BoxがFixtureの上に乗せました。
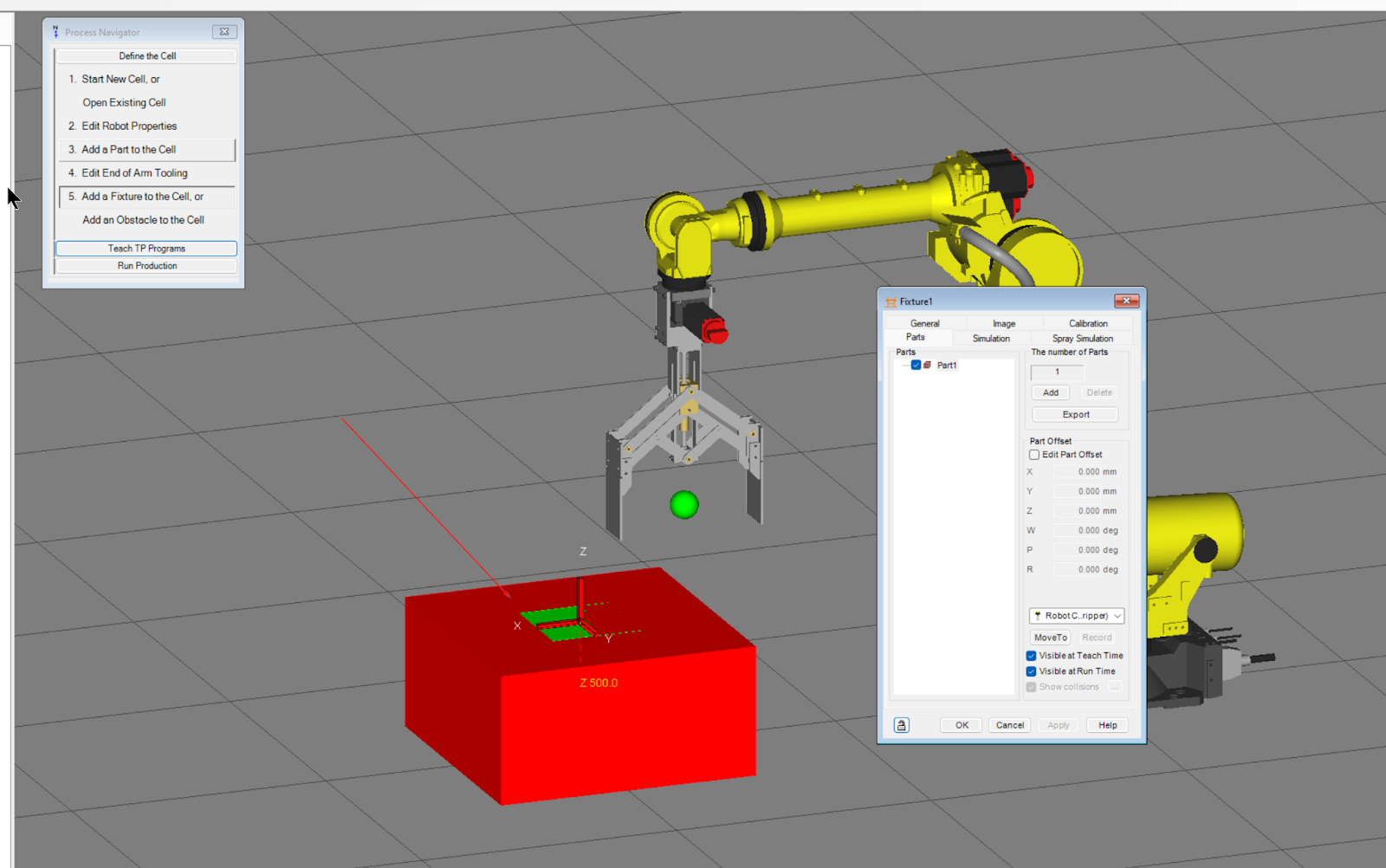
Boxの位置を調整してください。
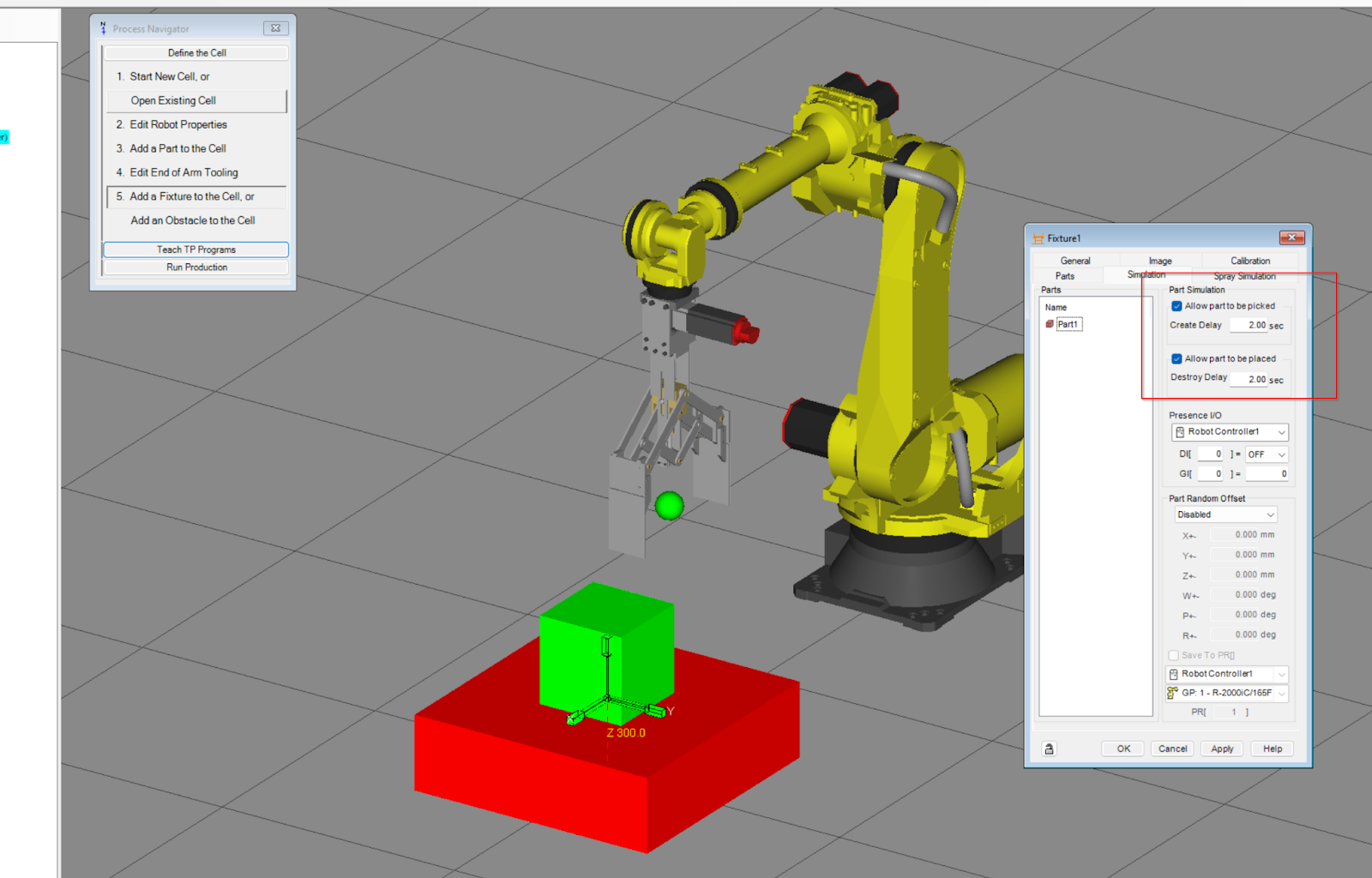
Configure as Picked
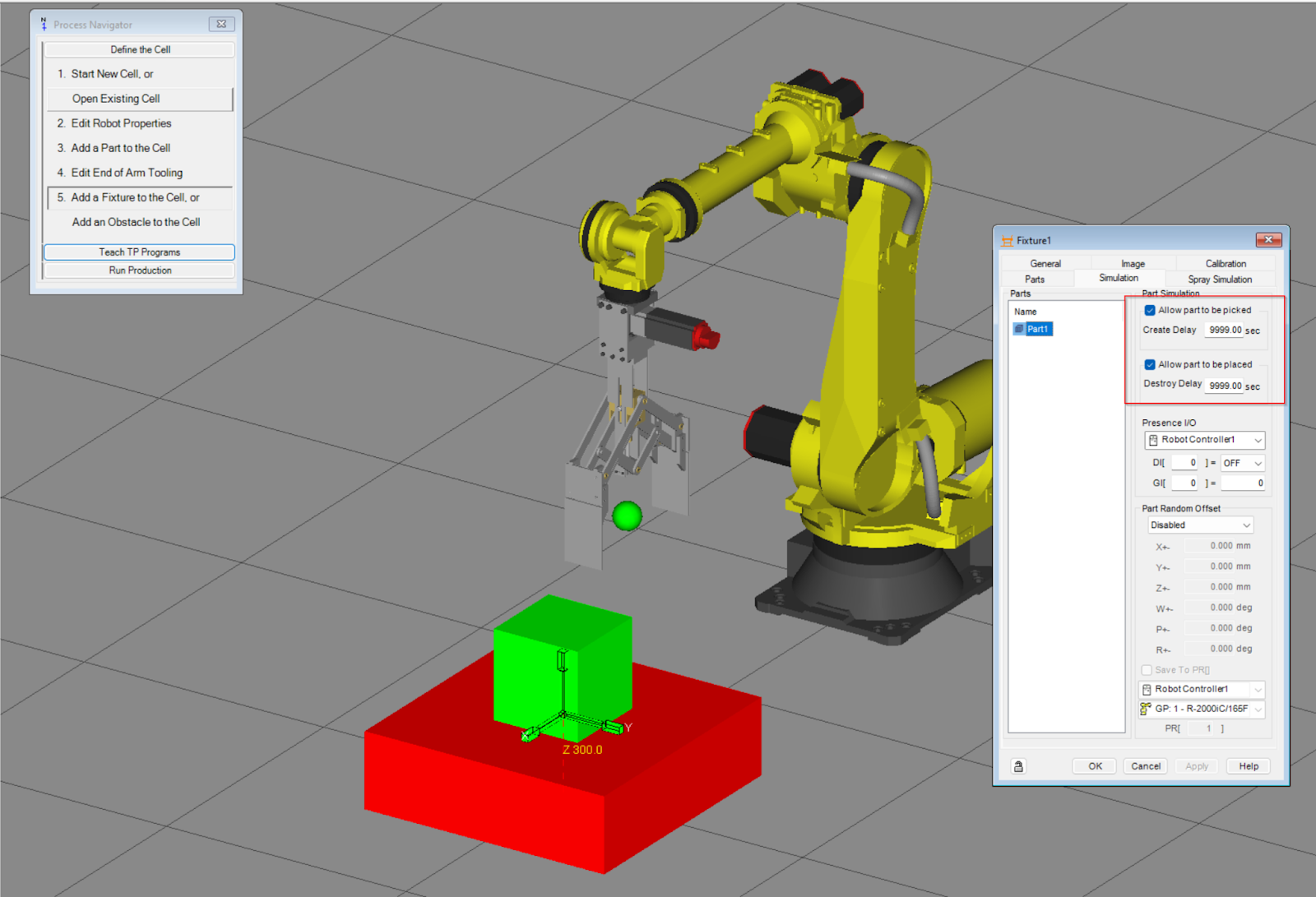
次はこのPartsに乗せてたFixtureをPick and Placeに使用できるように、赤枠にあるOptionsをCheck入れましょう。
Pick Delay Time
Create Delayの項目に2秒と設定します。
Add Other Fixture
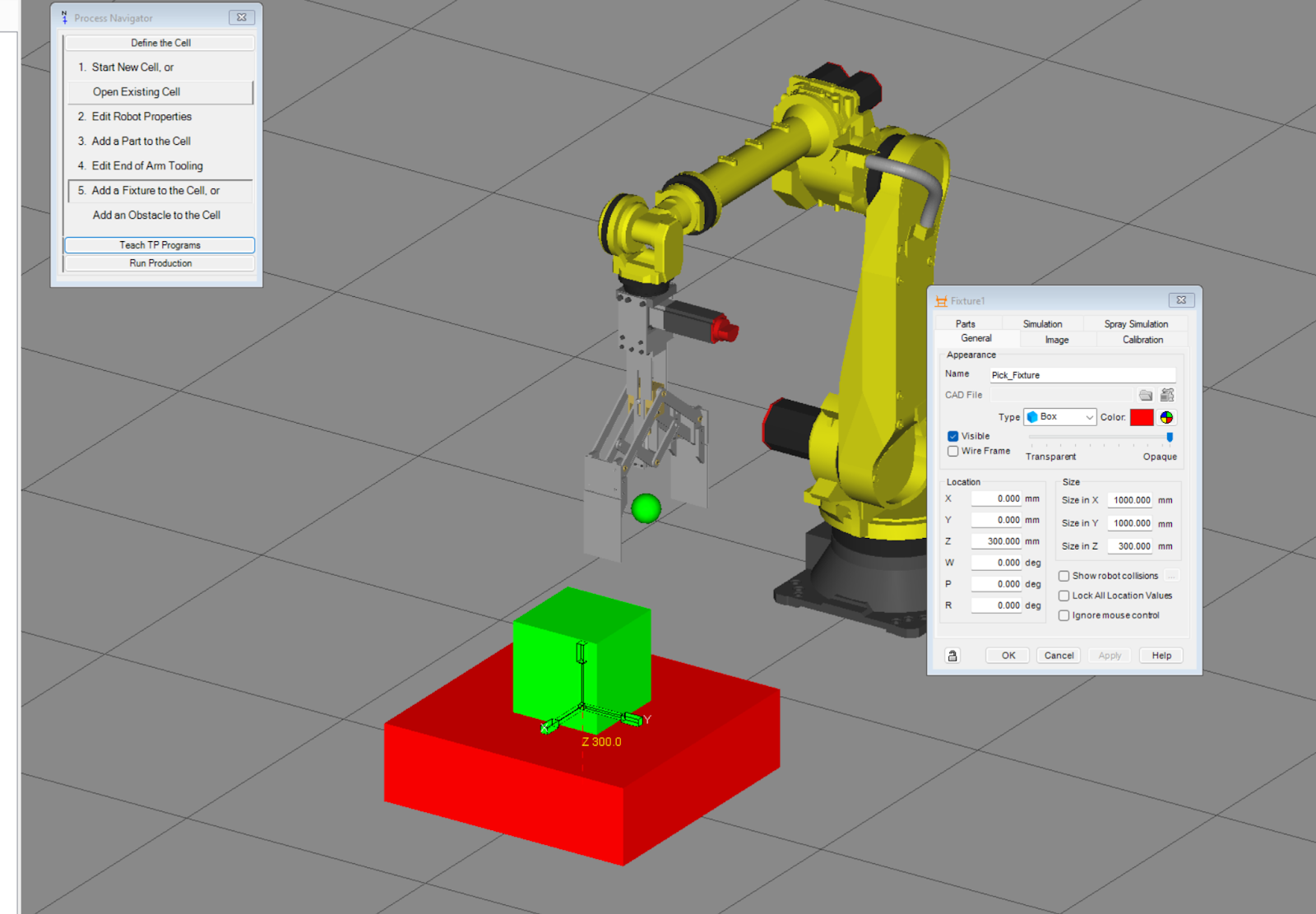
先程と同じ操作でPlace用のFixtureを追加します。
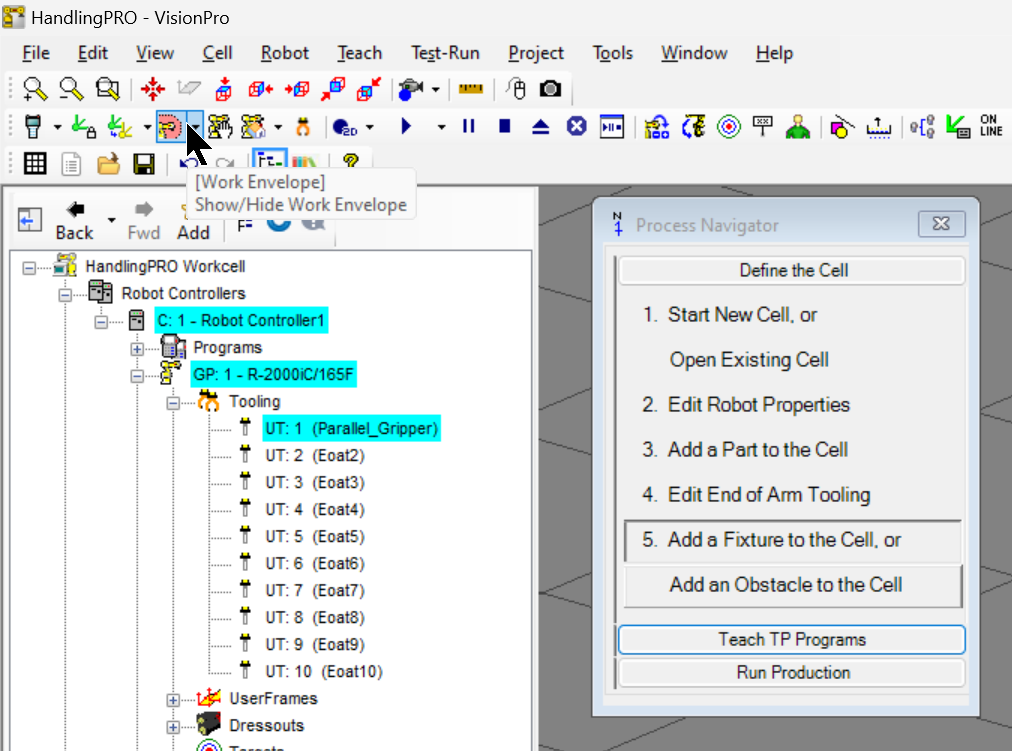
Check the Working Area
こちらのFixtureにもロボットが届く範囲に置く必要がありますので、まずロボットの稼働範囲を確認しましょう。
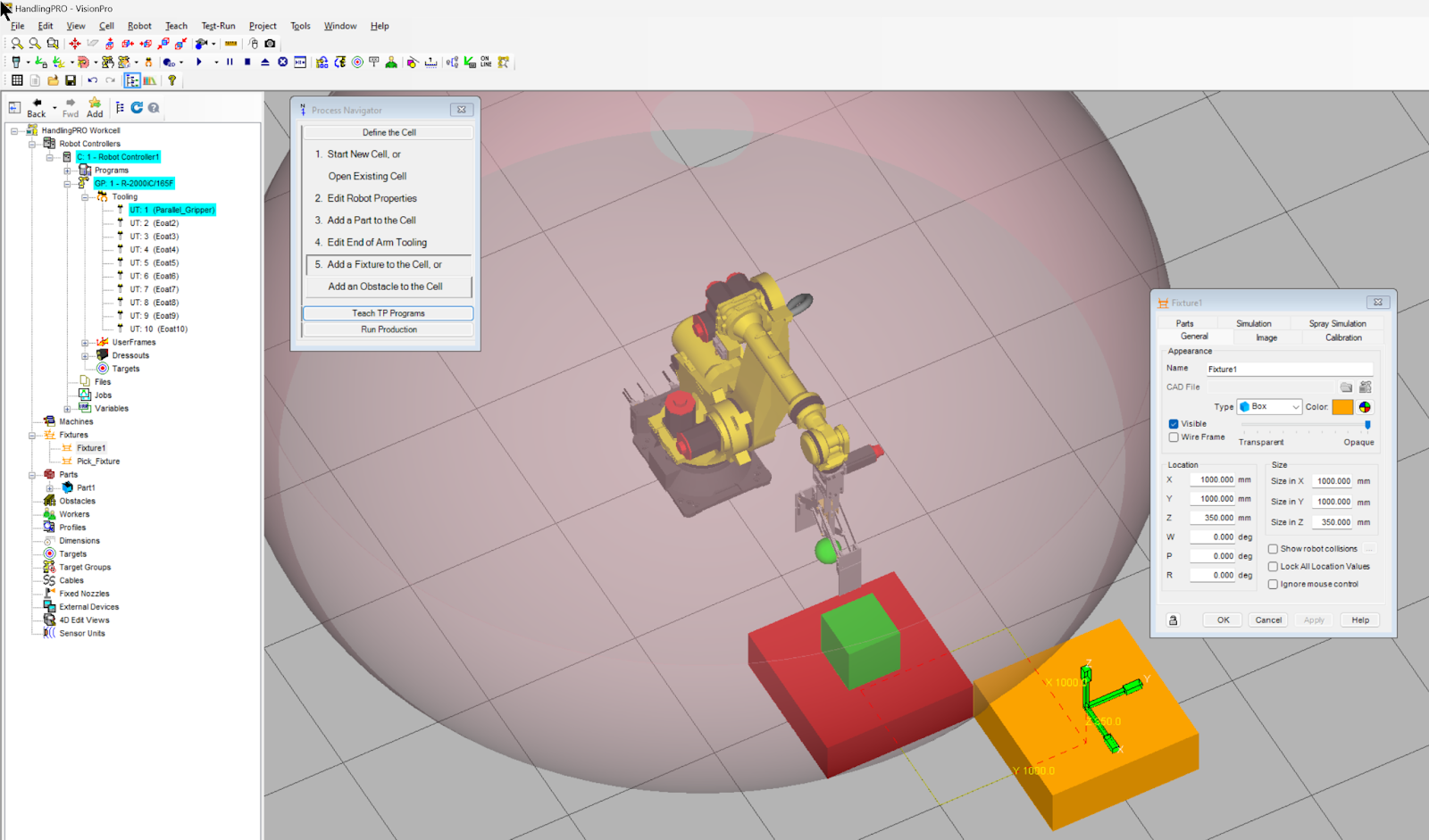
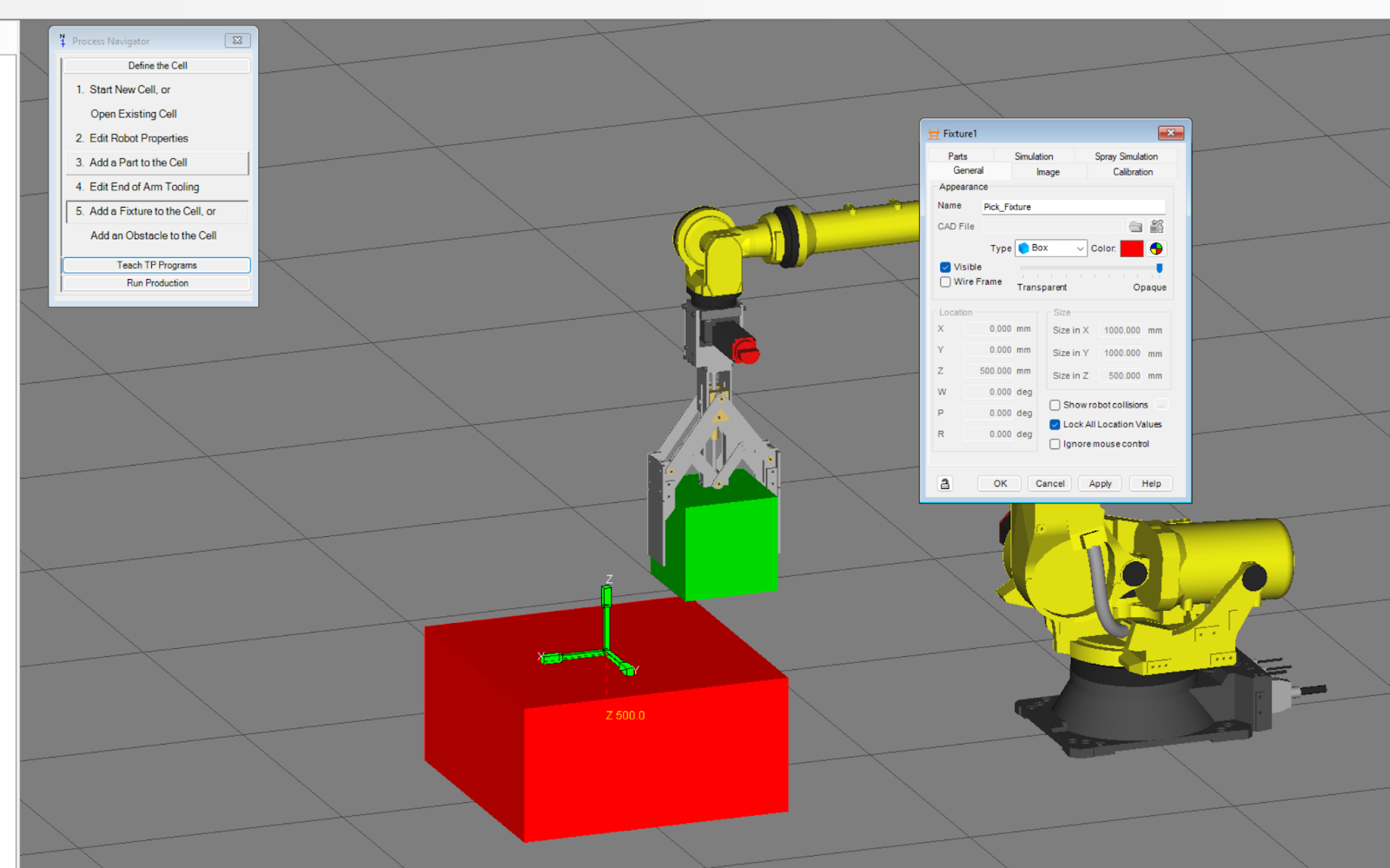
Adjust the position
ロボットの稼働範囲がわかれば、Fixtureを適切な場所に移動しましょう。
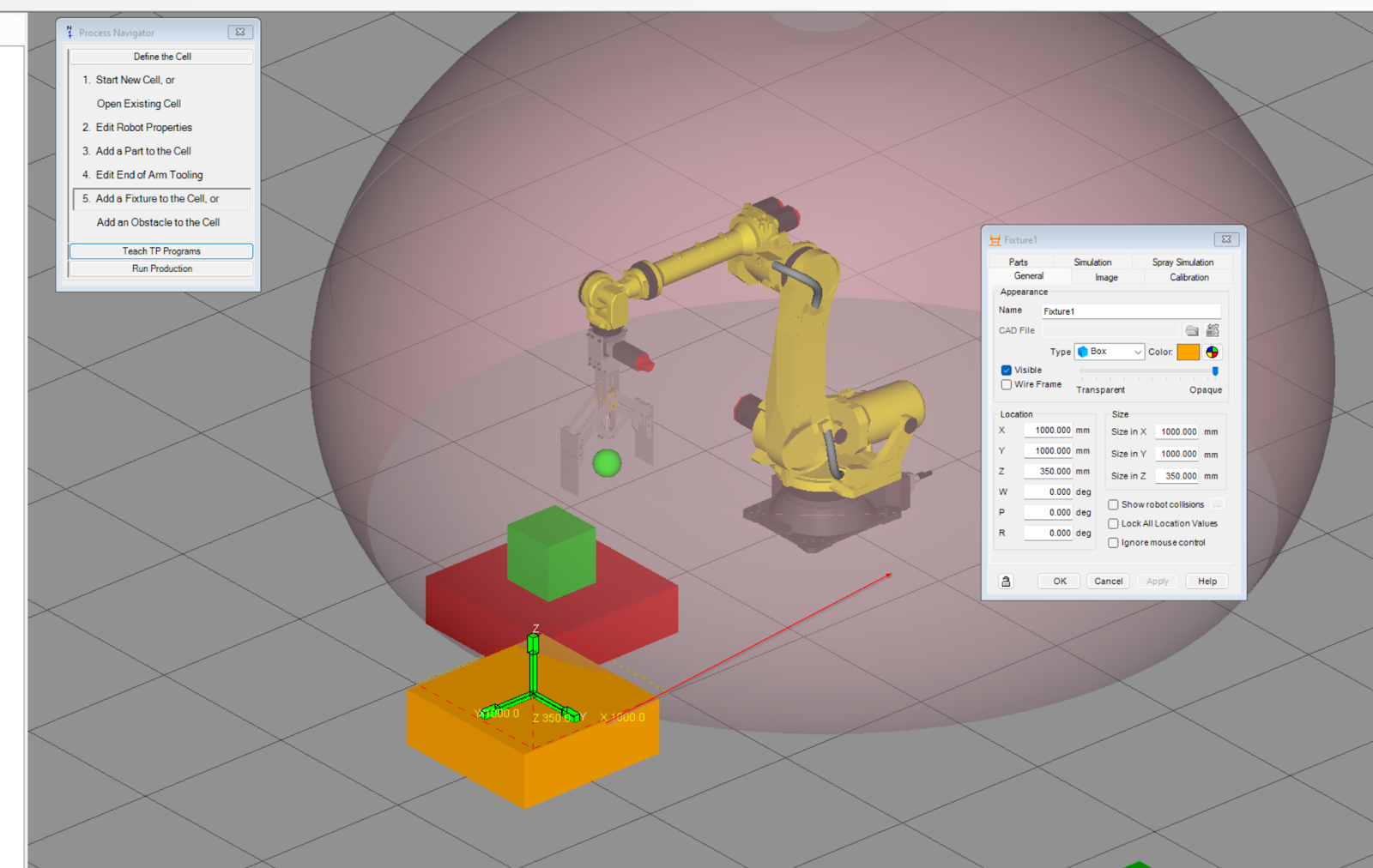
Done!
Adjust the parts
先ほどと同じ操作でPartsをFixtureの上に乗せましょう。
Adjust the postion
Boxの位置調整も忘れずに。
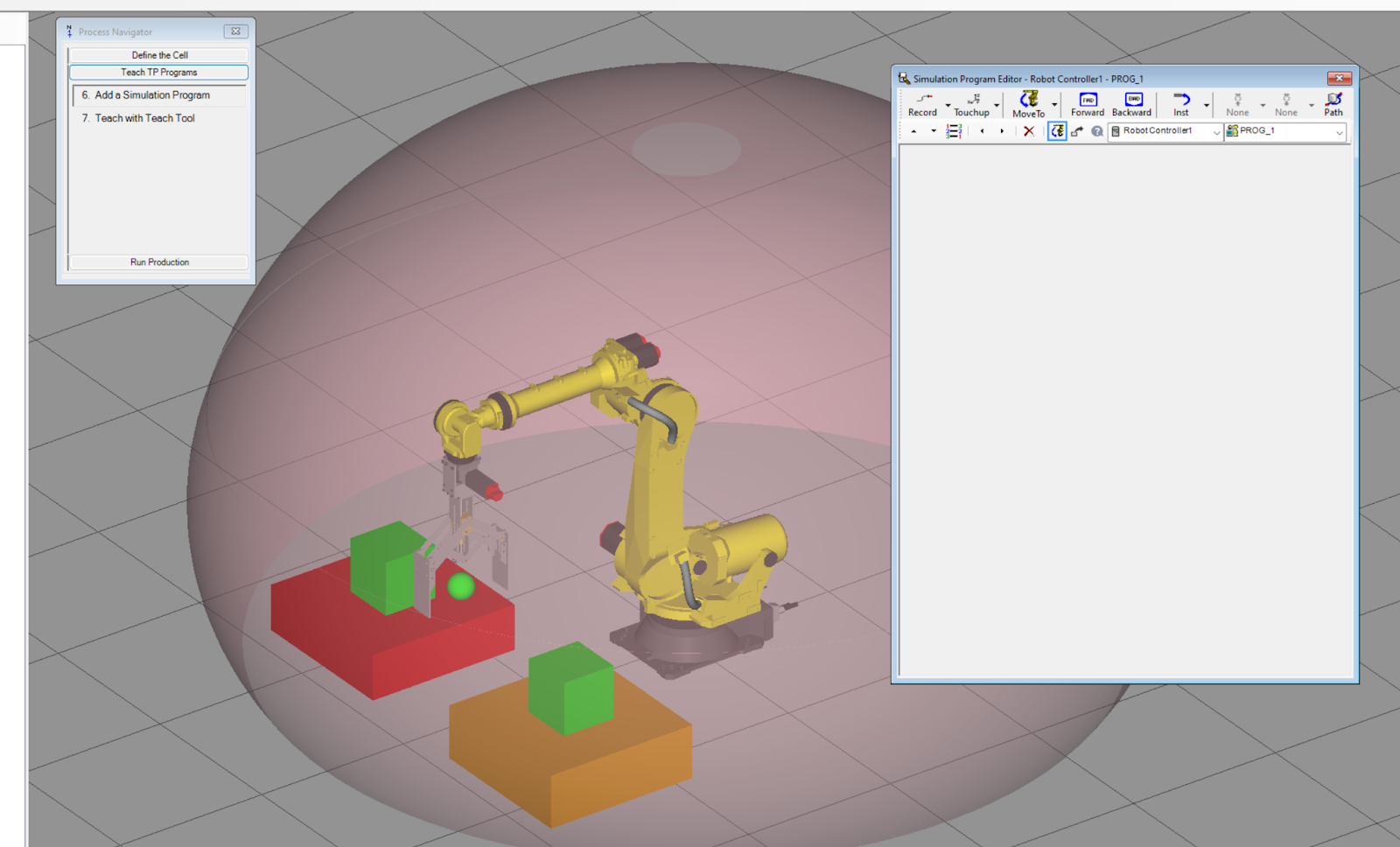
Add Simulation Program
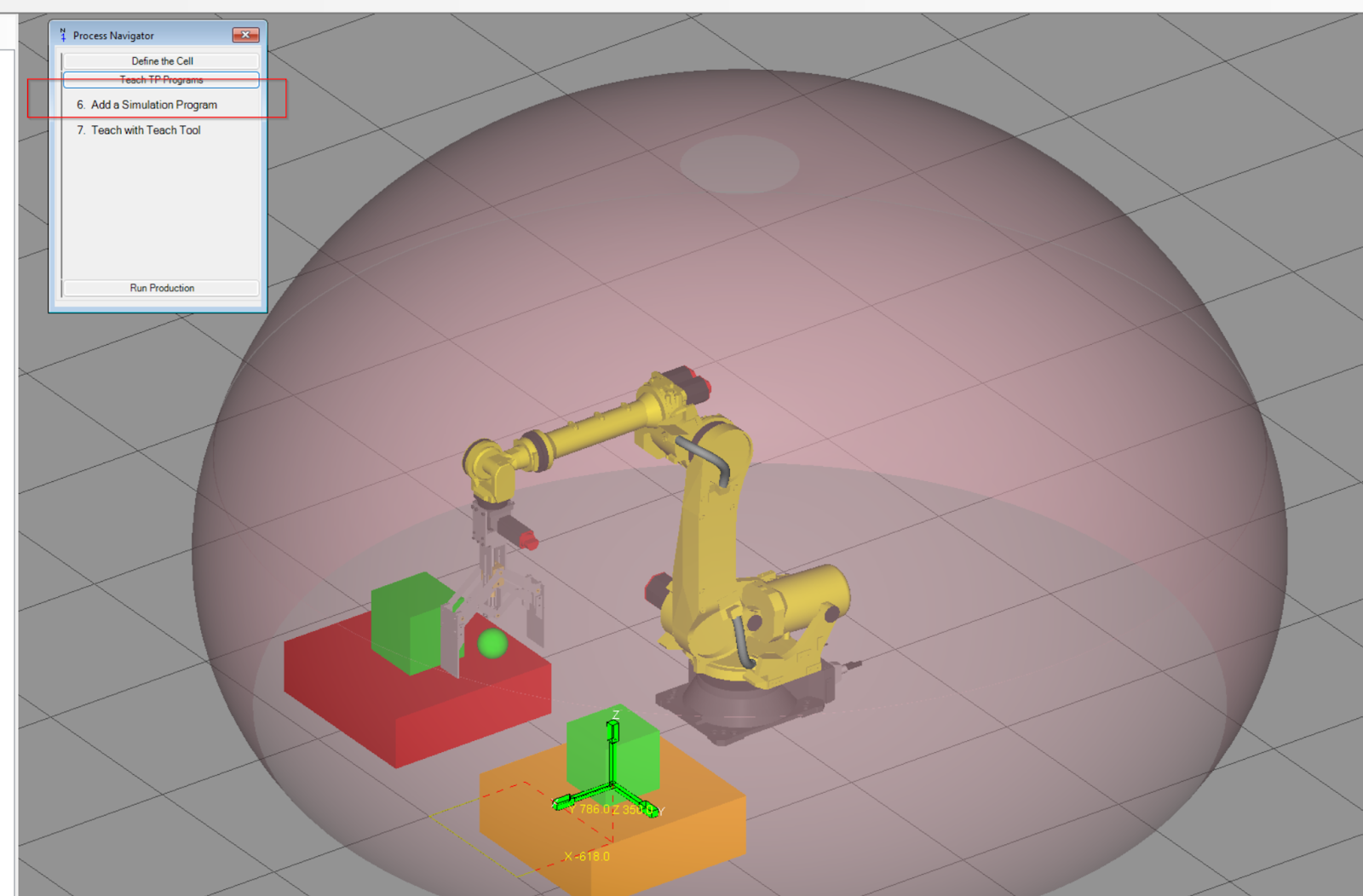
ここまで来たら、最後はシミュレーションプログラムを作成します。
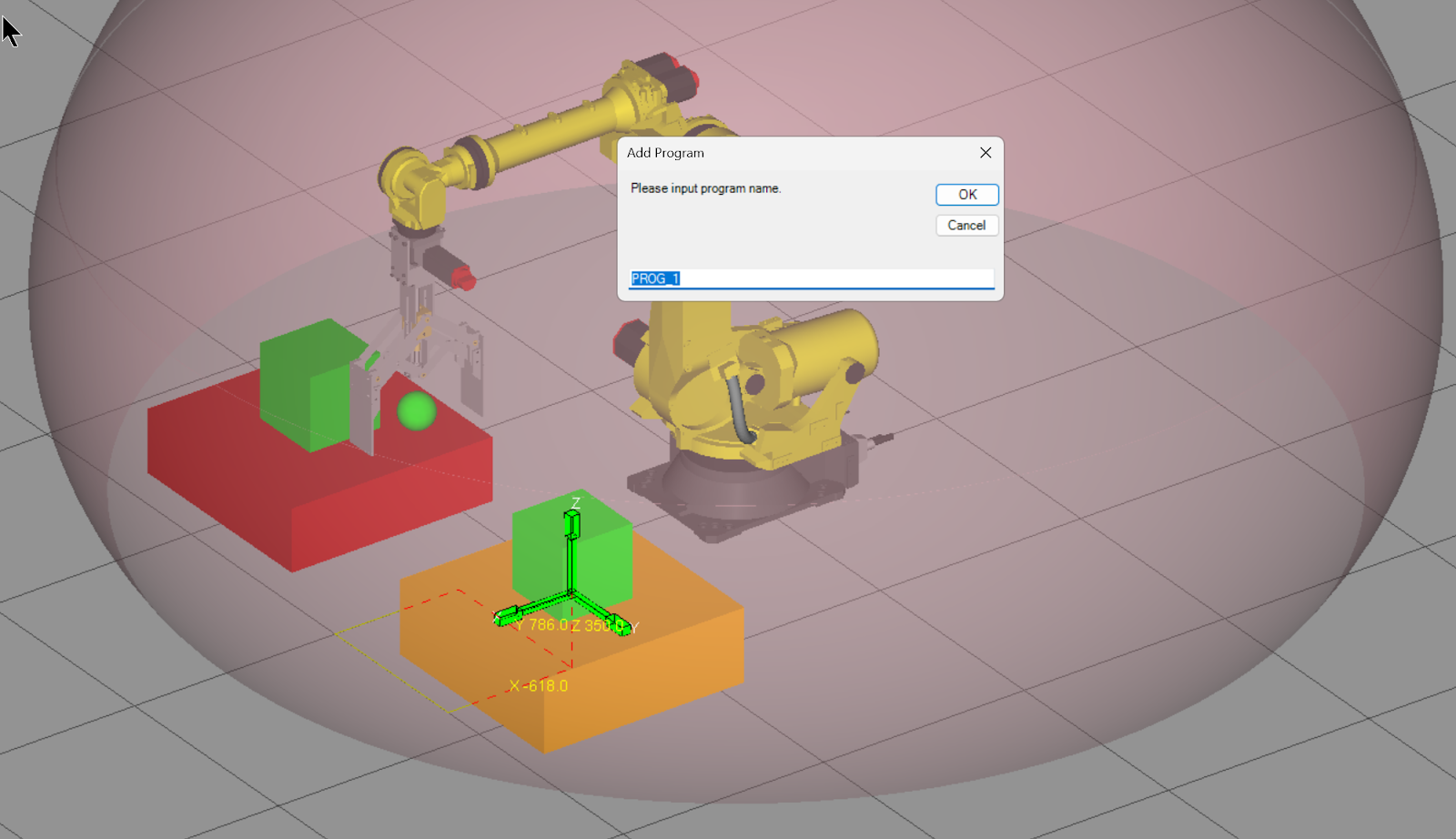
Navigatorにある”Add a Simulation Program”をクリックします。
プログラム名を入力しましょう。
Done!
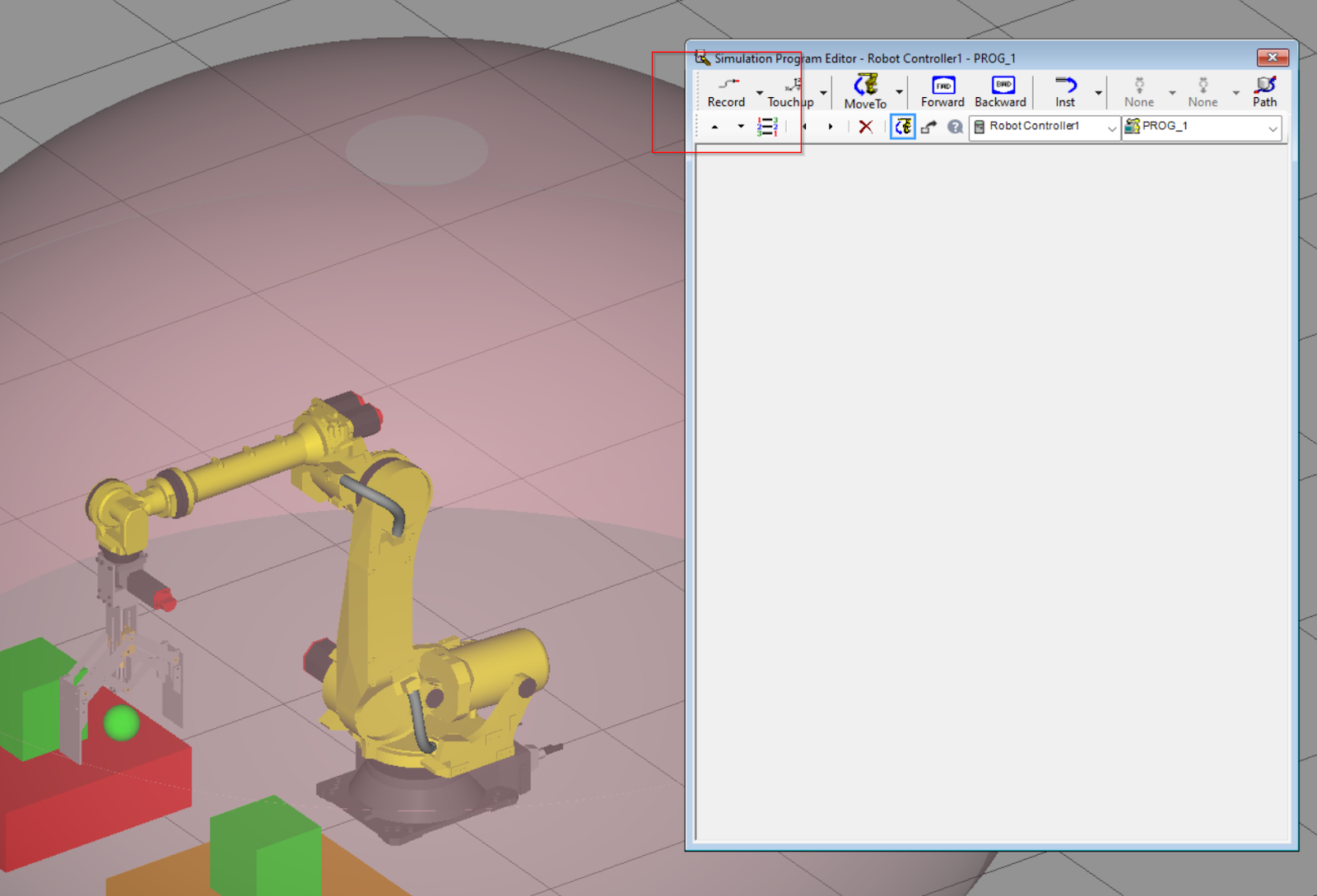
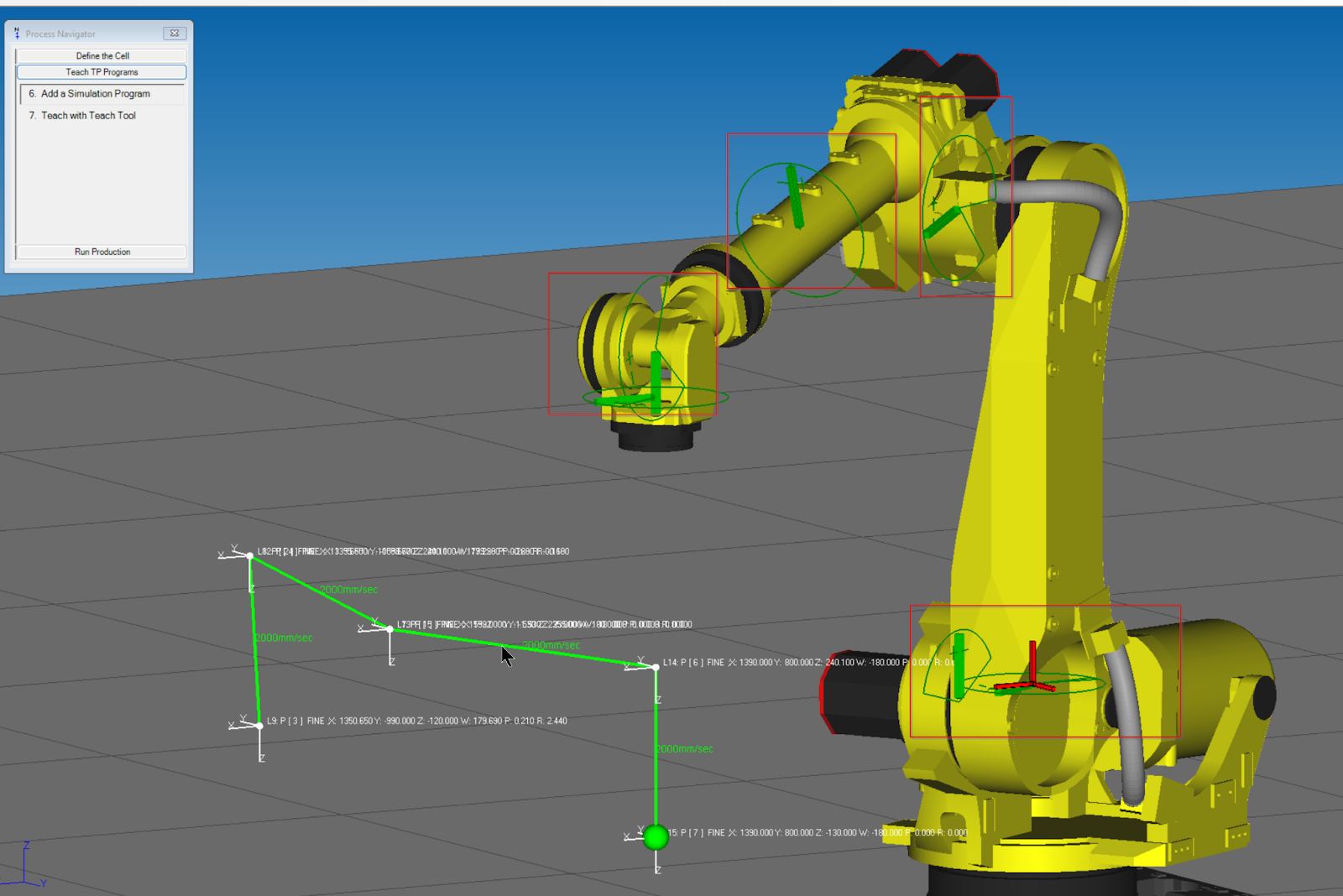
Record the Point
Recordボタンをクリックすれば、現在のロボットの位置を記憶できます。
Done!
Update the Point
また、現在の移動Pointを別のPointに変更したい場合、Touchupボタンをクリックしてください。
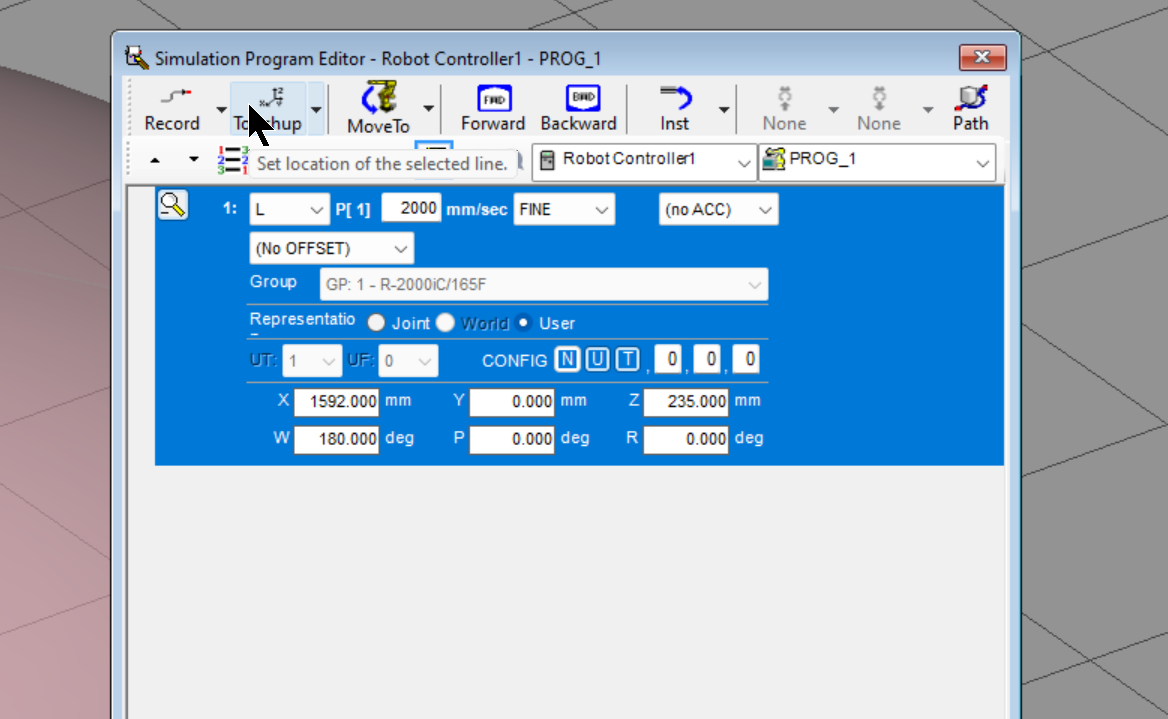
OKで進みます。
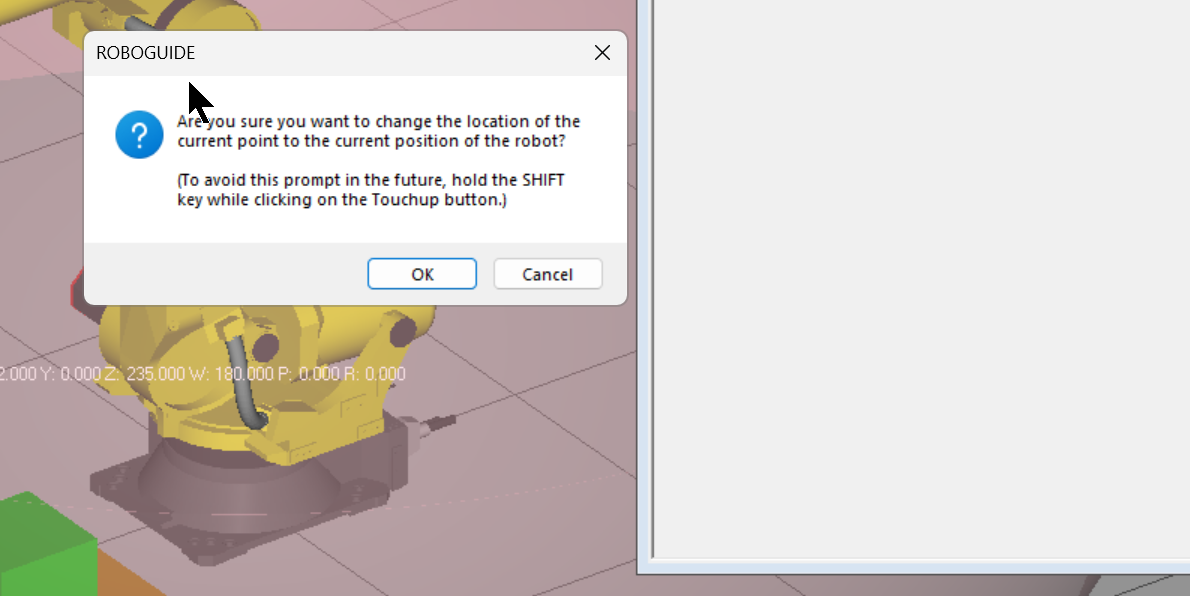
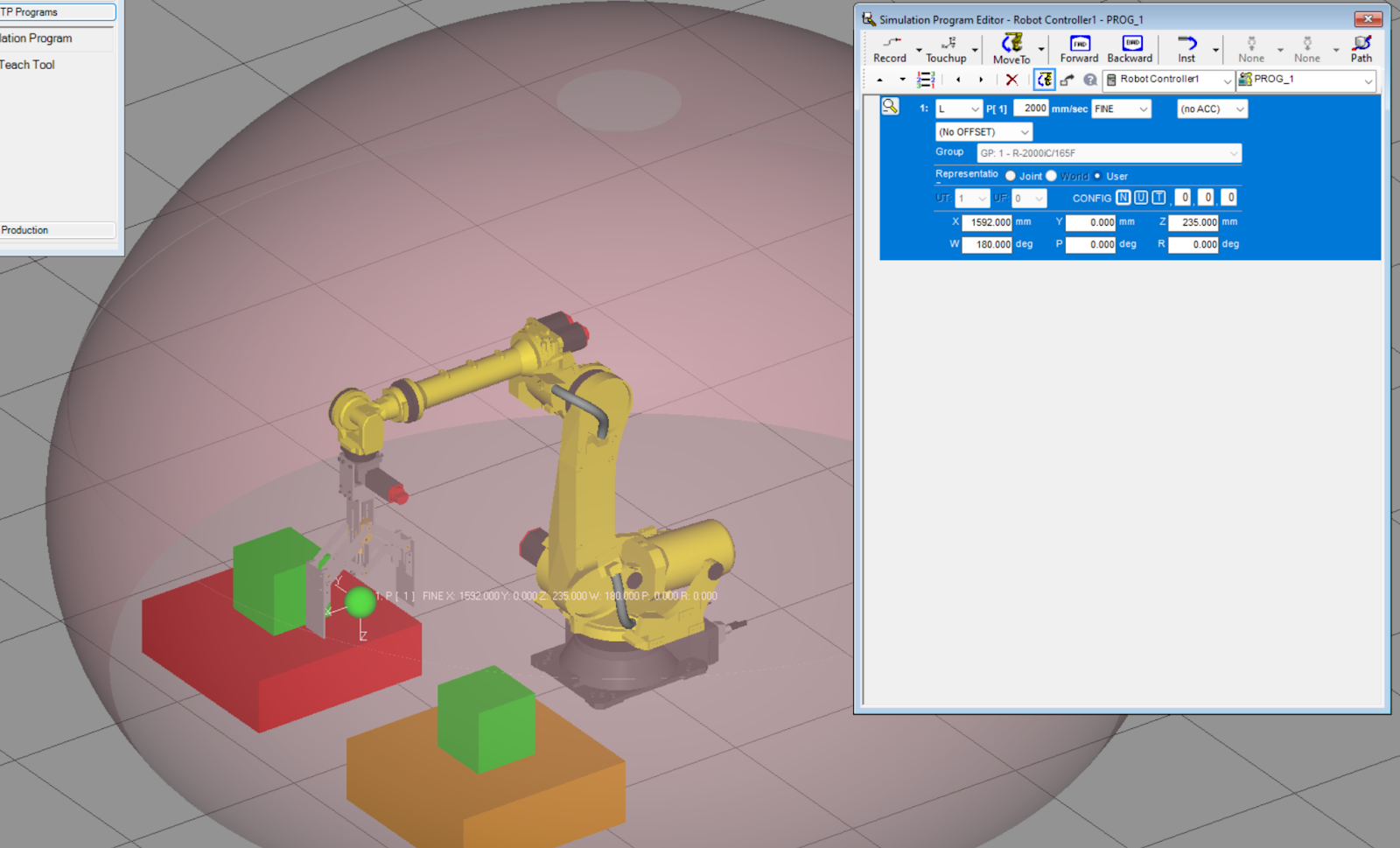
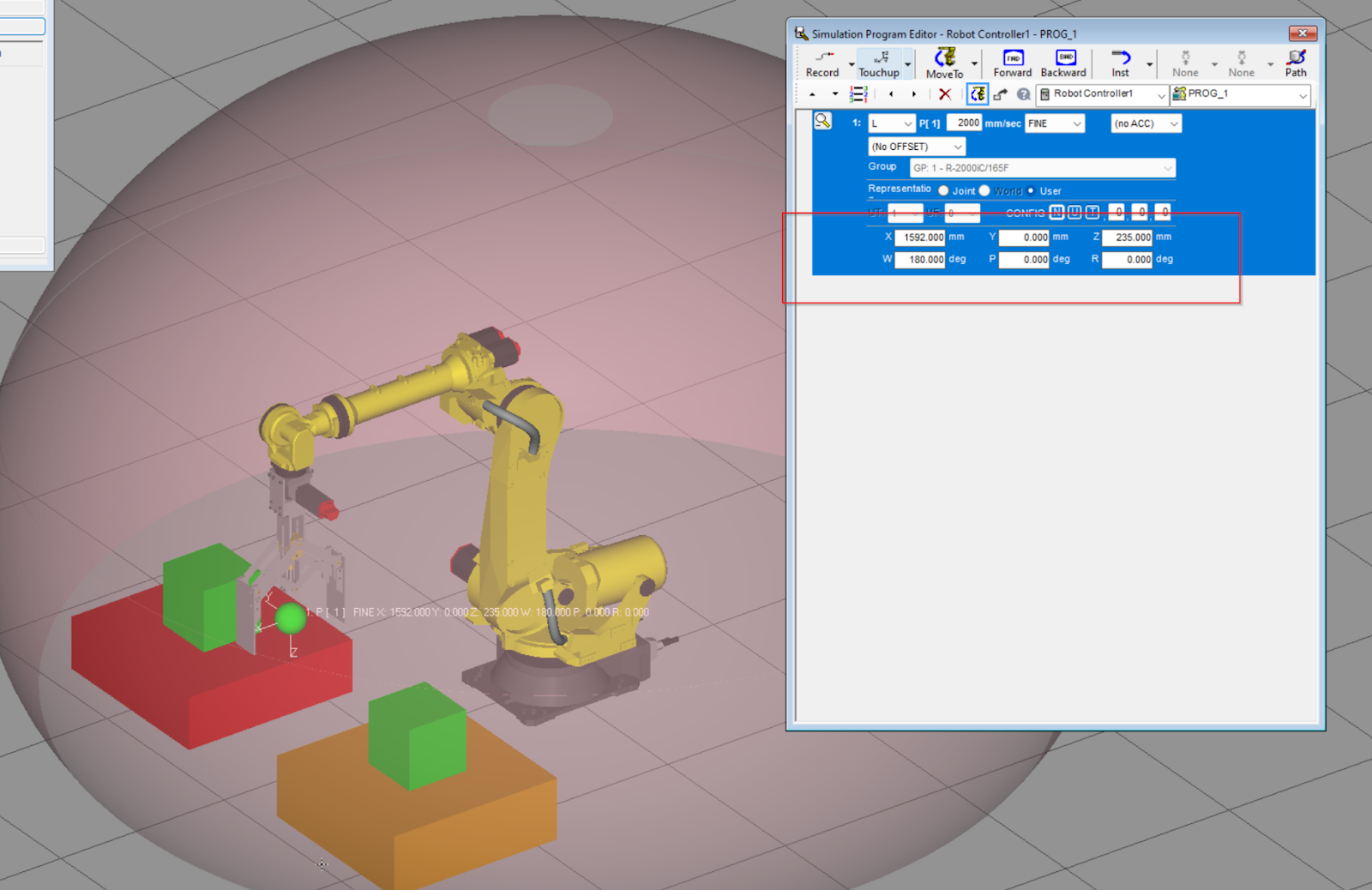
Done!現在ロボットの座標が記憶されました。
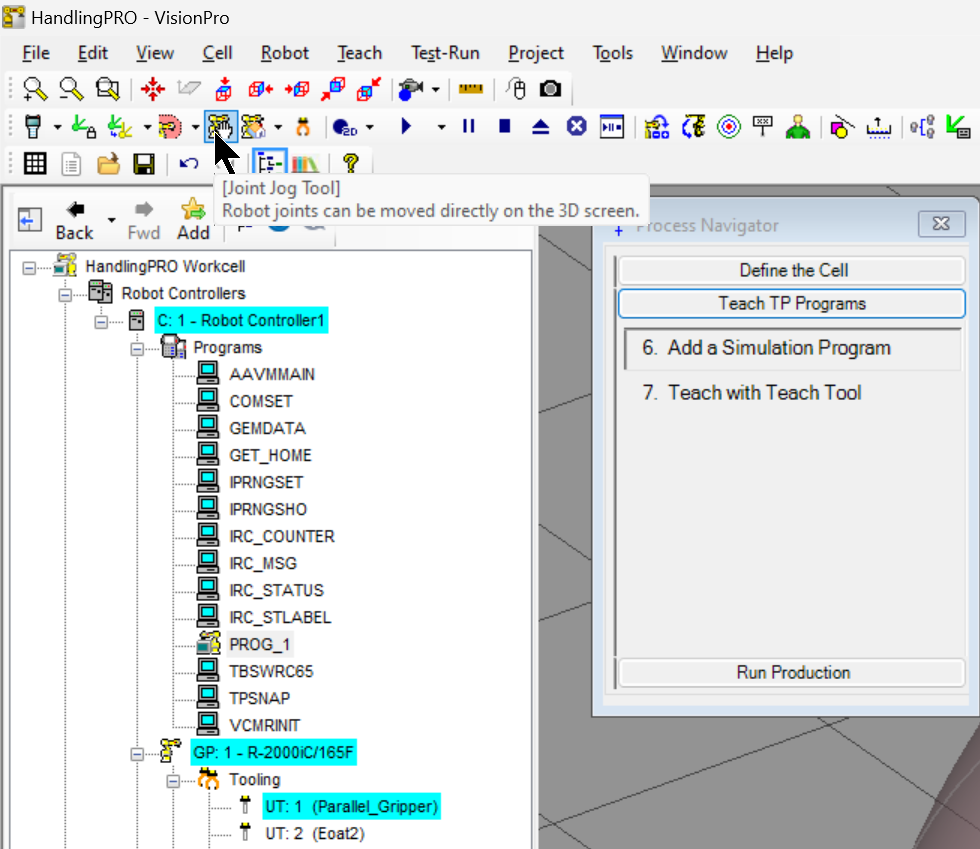
Activate Jog Tool
ロボットを移動したい場合、Joint Jog Toolを使用しましょう。
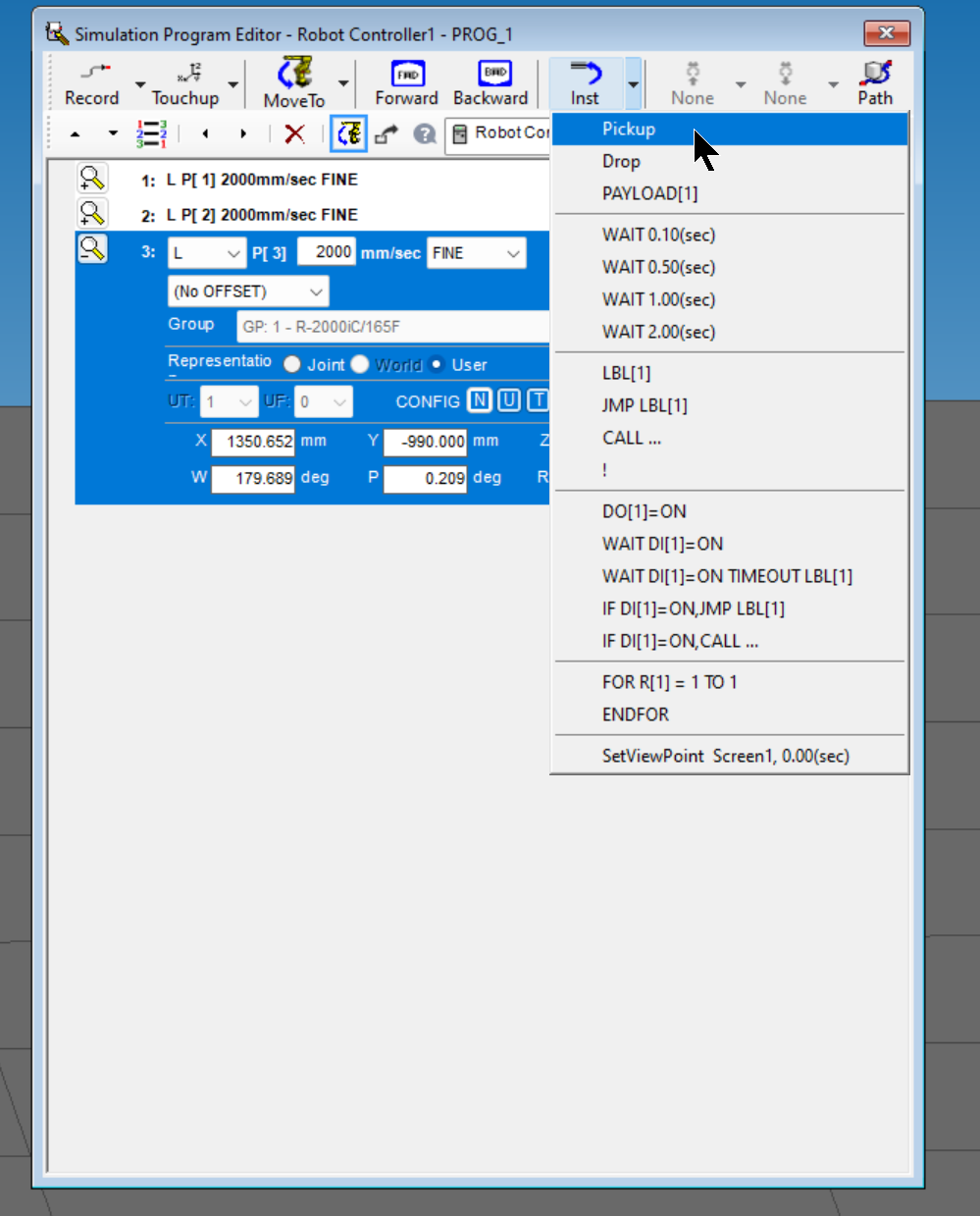
Inst Pickup Action
Inst>Pickup コマンドを追加するとBoxをPickupする動作をトリガーできます。
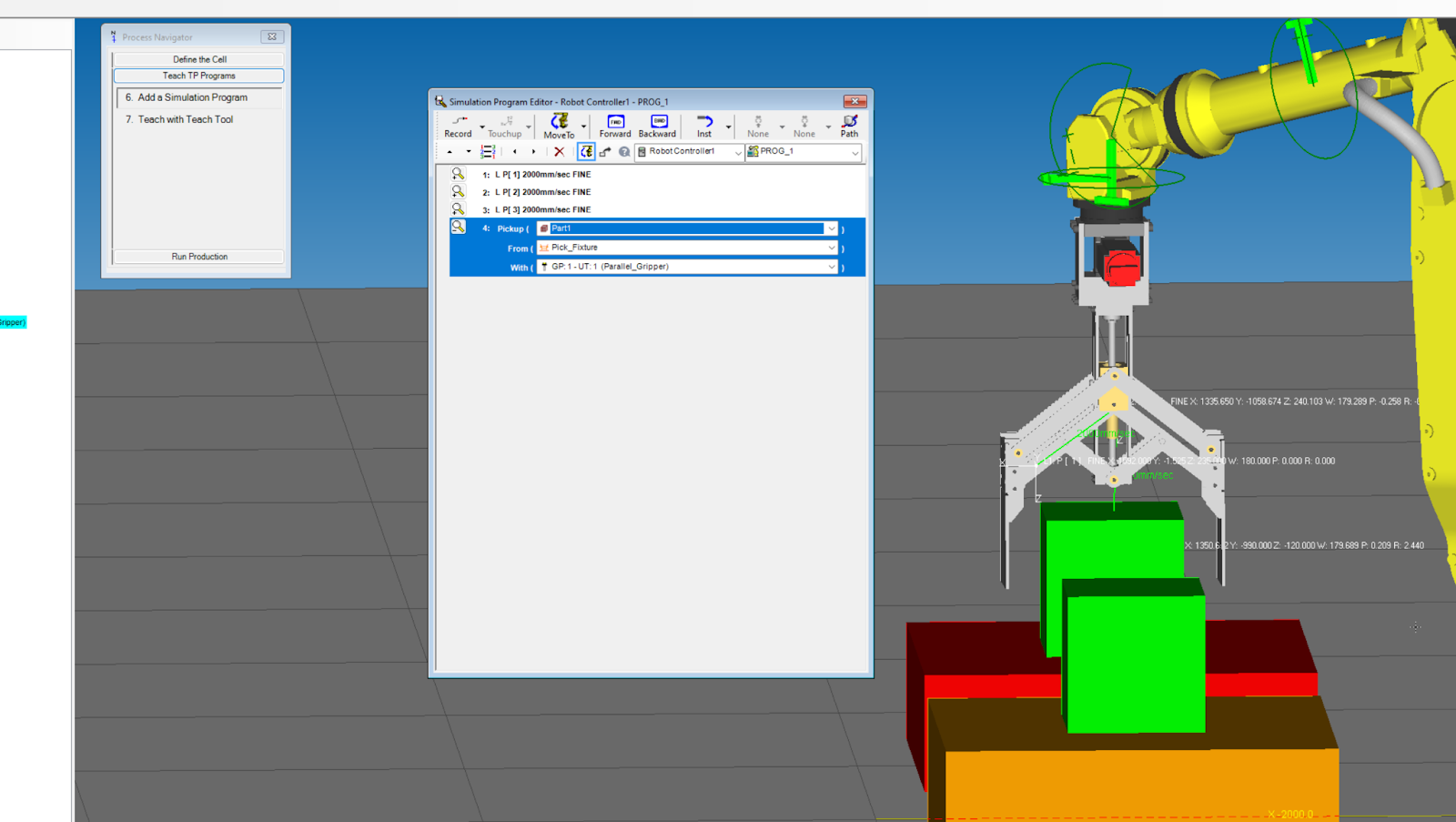
Pickupコマンドが追加され、PickupしたいObjectを設定できます。
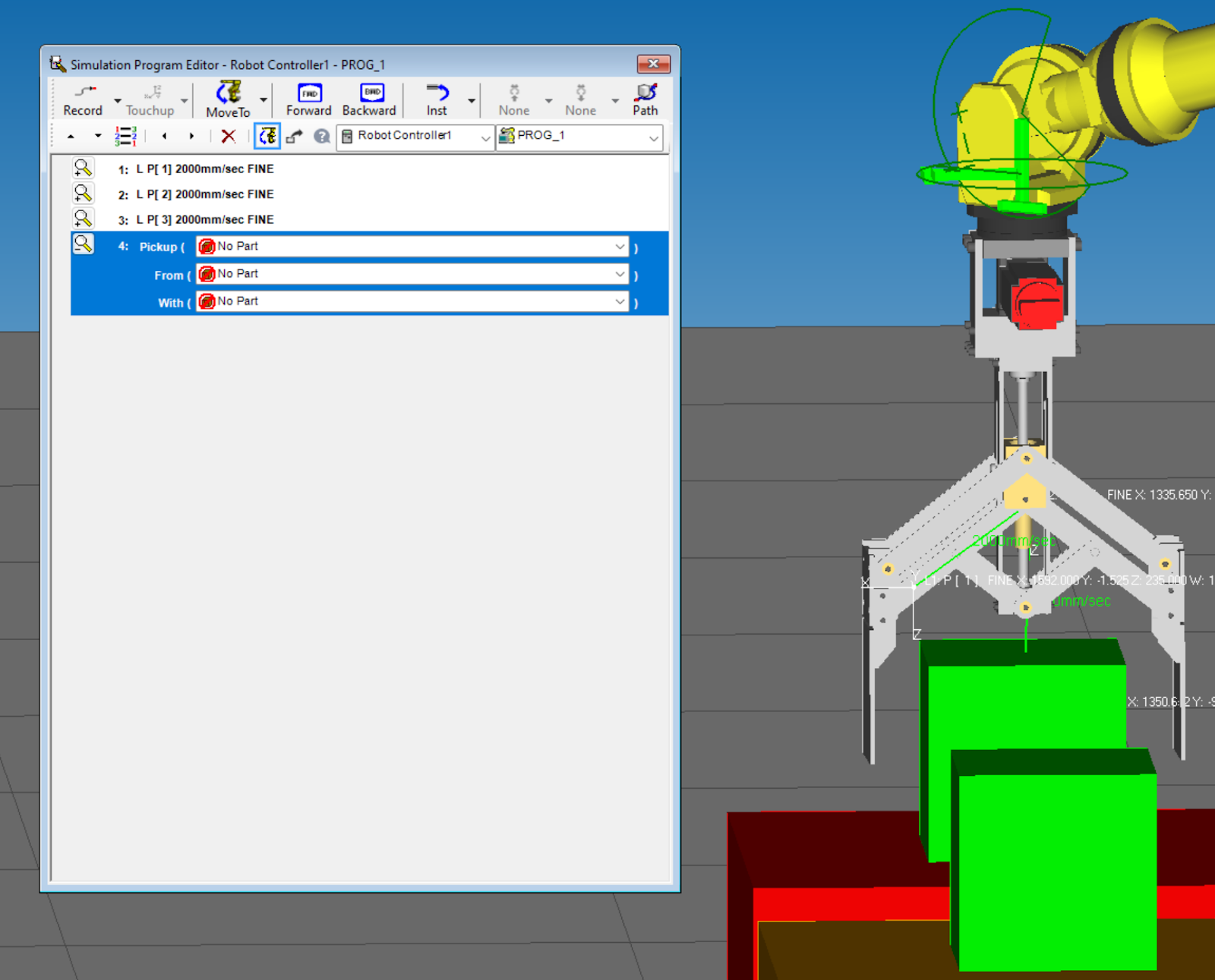
先ほど追加したPartsに設定しましょう。
Inst Drop Action
同じく、Dropコマンドを追加すればPartsをGripperから離すことも可能です。
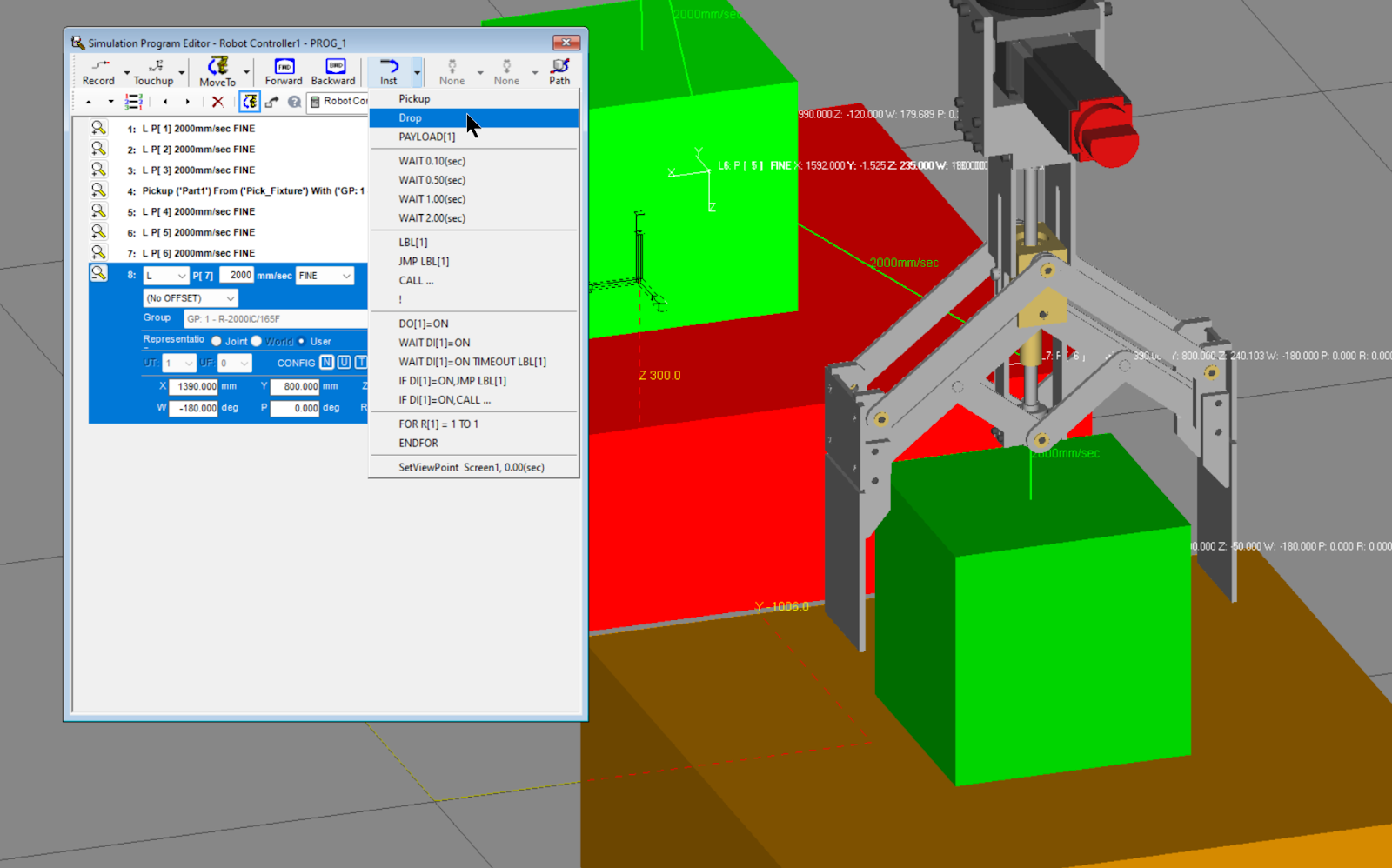
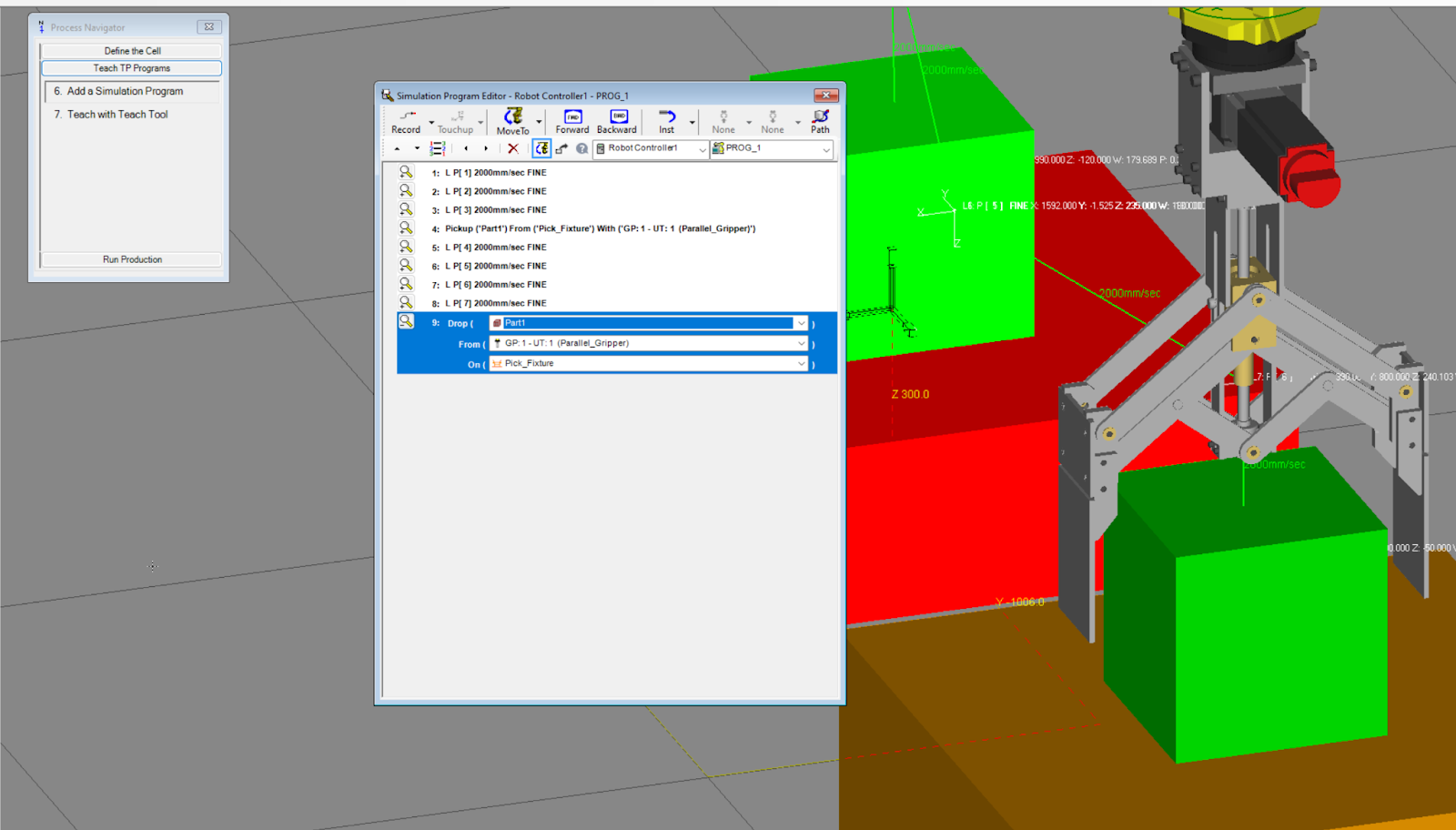
Dropコマンドが追加され、PickupしたいObjectを設定できます。
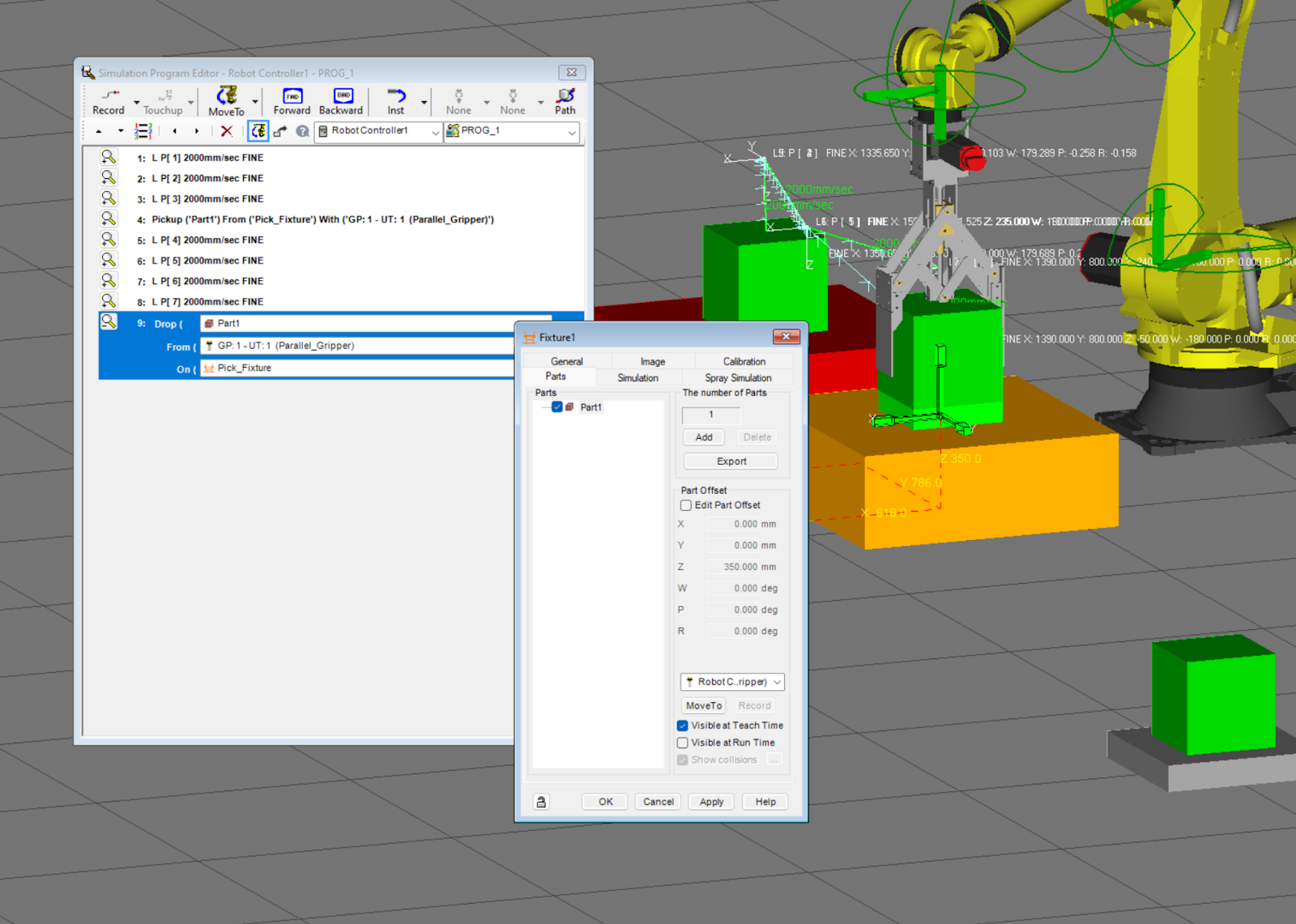
Cancel the Visible in runtime
最後は、Simulation中にPlacedされるPartsを見せないように、Visible at Run TimeのCheckboxを外してください。
Result
こちらの動画で動作確認できます。