本記事では、Easy PLCを使ってOMRON製R88DサーボをEtherCAT経由で接続・操作する方法を解説。AutoShop上からの手動制御や、トレース機能による動作波形の可視化に説明します。
さ、FAを楽しもう!
Reference Link



前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
技術は独り占めせず、届けるもの
私たちは工場の生産技術や制御に関する技術情報を、ブログや動画などで無料公開しています。「知識は誰でもアクセスできるべき」という信念のもと、現場で役立つ具体的なノウハウやトラブル事例などを発信してきました。すべて無料で続けているのは、「知らなかったせいで困る人」を少しでも減らしたいからです。
また、もしあなたの現場で…
- 「このPLCとデバイスの組み合わせ、ちゃんと動くのかな?」
- 「EtherCAT通信でうまくいかない部分を検証してほしい」
- 「新しいリモートI/Oを試したいけど社内に検証環境がない」
など、困っている構成や試してみたいアイデアがあれば、ぜひお知らせください。機器の貸出や構成の共有が可能であれば、検証し、記事や動画で発信します(ご希望に応じて匿名対応も可能です)。
支援のかたち
現在、私達の活動はほぼ無償で続けており、記事や動画の制作には、時間と検証環境の整備が必要です。この活動を継続的にコンテンツを提供するためには、皆様の温かいご支援が大変重要です。
メンバーシップ(ラジオの応援)
Fullさんとのラジオをより充実させるための支援プランです。
https://note.com/fulhause/membership/join
Amazonギフトリスト
コンテンツ制作に必要な機材・書籍をリストにしています。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon(ブログ・動画活動への応援)
月額での小さなご支援が、記事の執筆・検証環境の充実につながります。
https://www.patreon.com/user?u=84249391
Paypal
小さな支援が大きな力になります。
https://paypal.me/soup01threes?country.x=JP&locale.x=ja_JP
知ってたら助かること、届けたいだけです
あなたの応援が、知識の共有をもっと自由で持続可能なものにしてくれます。これからもどうぞよろしくお願いします。
soup01threes*gmail.com
技術はひとりじゃもったいない。
Implementation
ESIファイルのダウンロード
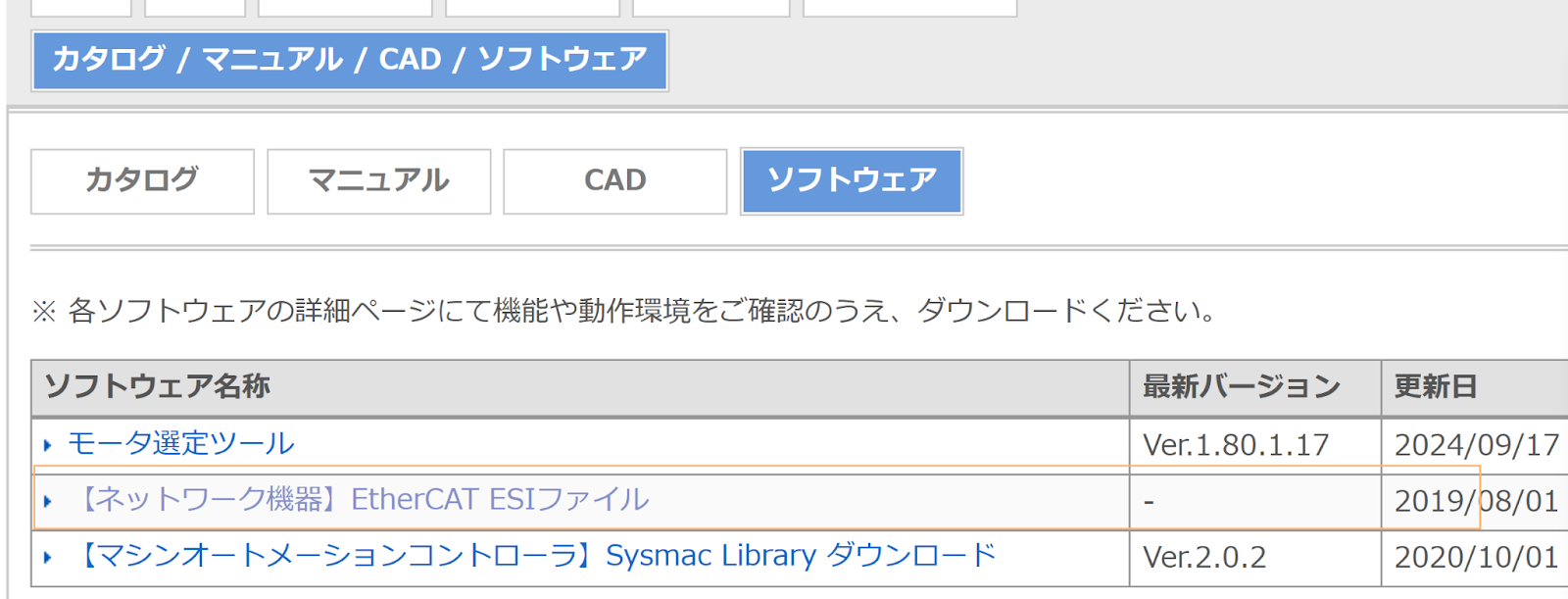
Omron製のEtherCAT対応機器(例:R88D-1SNシリーズなど)を使用する際、ESIファイルをPLCや設定ツールに登録することで、正しく通信やパラメータ設定ができるようになります。以下のリンクを開き、ESI FILEをDownloadしてください。
https://www.fa.omron.co.jp/products/family/3549/download/software.html
EtherCATコンフィギュレーション
ESIファイルのインストール
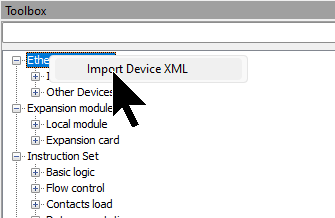
ESIファイルをダウンロードしただけでは、まだデバイスは使えません。AutoShopに手動でデバイスXMLをインポートする必要があります。プロジェクトを開いた状態で、左側の「Toolbox(ツールボックス)」を展開します。「EtherCAT」カテゴリを右クリックし、「Import Device XML」を選択します。
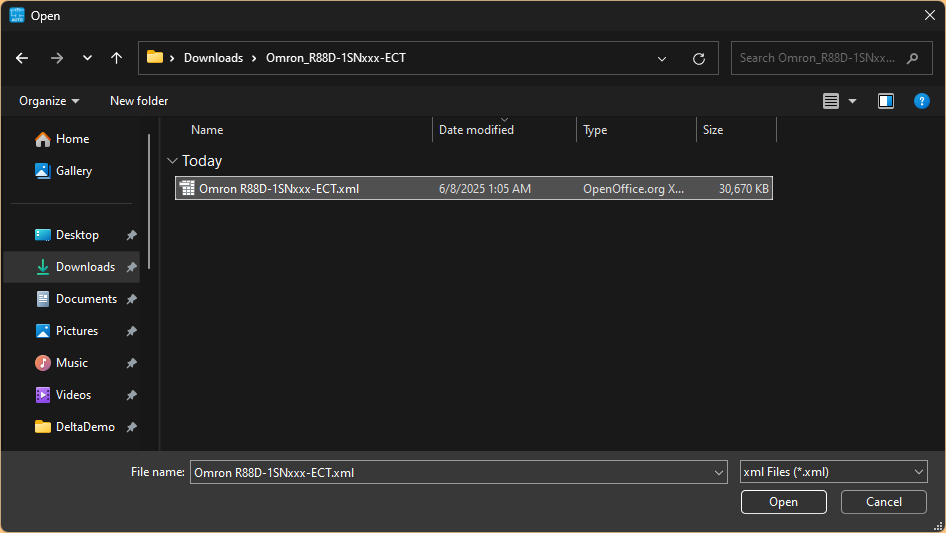
表示されたファイル選択ウィンドウで、先ほどダウンロード・解凍した .xml ファイル(例:Omron_R88D-1SNxxx-ECT.xml)を選びます。
このダイアログが表示されたら、XMLファイルの取り込み自体はOKです。でも反映させるにはAutoShopの再起動が必要になります。
オートスキャン
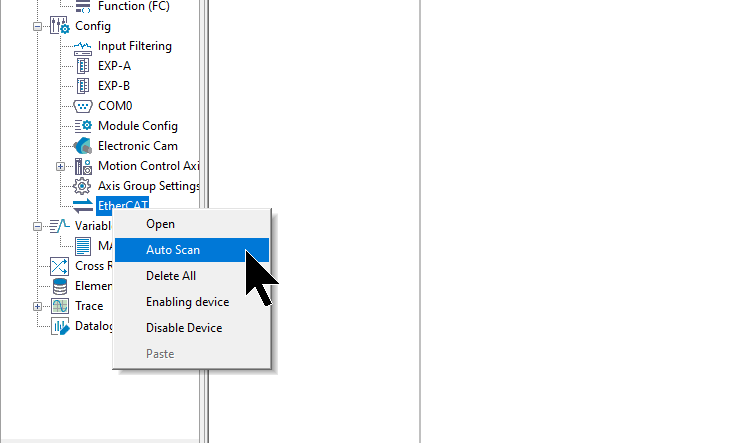
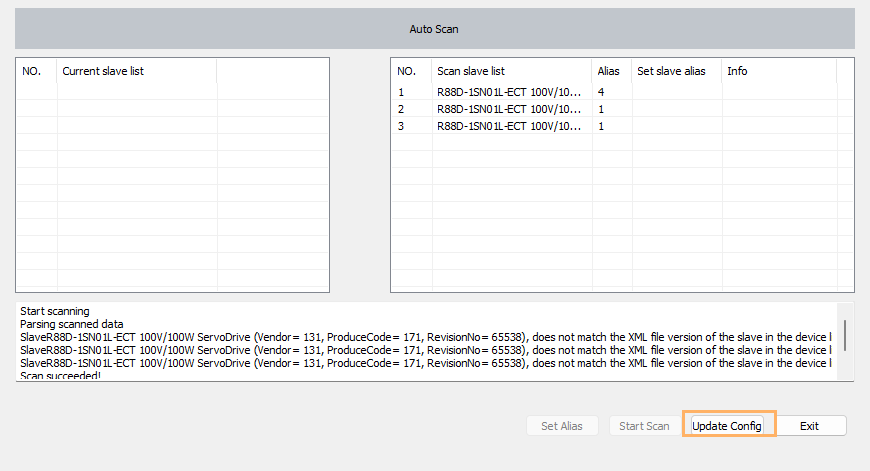
AutoShopにもEtherCAT 自動Scan機能があり、Config>EtherCAT>Auto Scanをクリックしまうs。
EtherCATのAutoScanが自動的に行い、ネットワーク上のすべてのEtherCATを検知します。
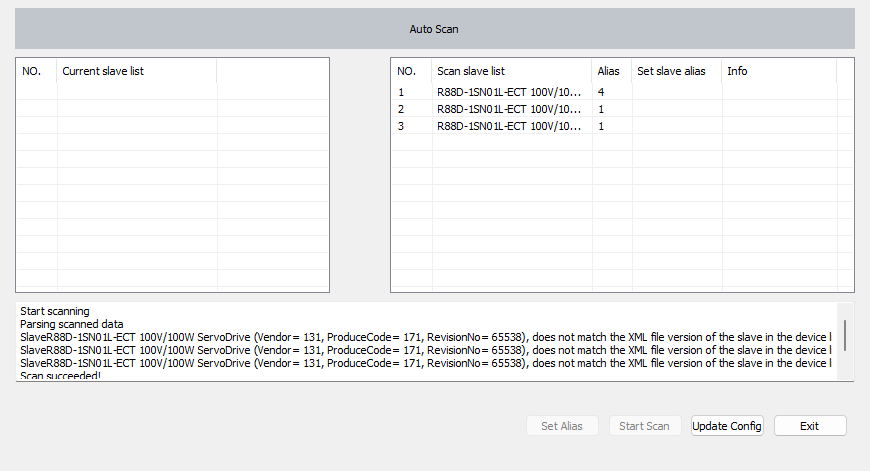
Update Configをクリックし、検索結果をEtherCAT Configurationに反映します。
OKで進みます。
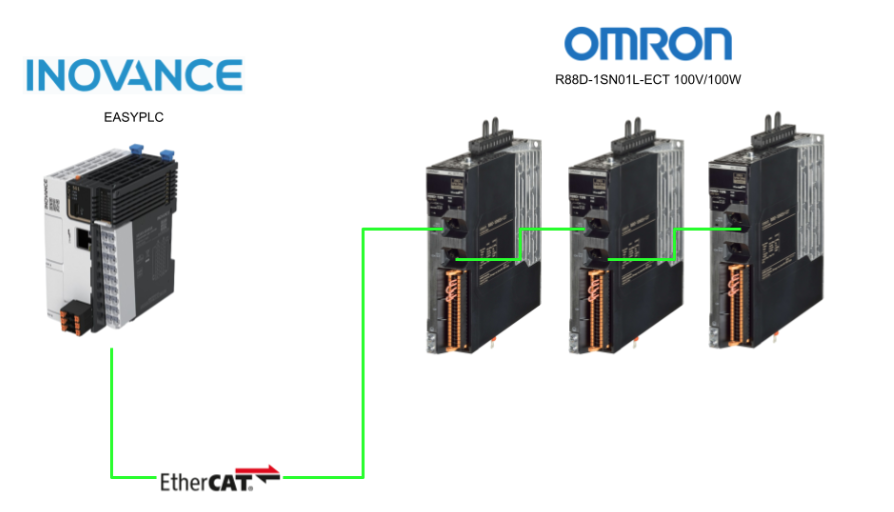
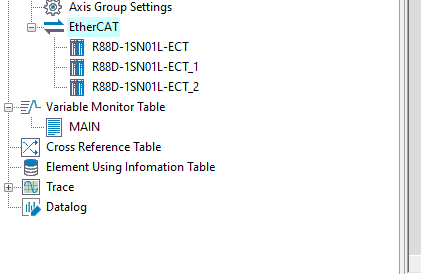
Done!今回記事で接続している3台分のオムロンR88DシリーズServo がEtherCAT Configurationに反映されました。
軸の追加
ESIファイルでデバイスを認識させたあとは、実際に動かすための「軸定義(Axis)」を行います。
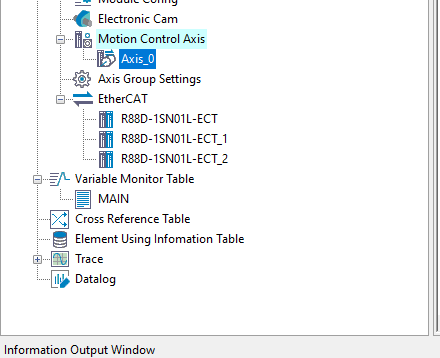
- 「Motion Control Axis」フォルダを右クリックプロジェクトツリー内のMotion Control Axis を右クリックします。
- 「Add Axis(軸の追加)」をクリックし表示されたメニューから Add Axis を選択。
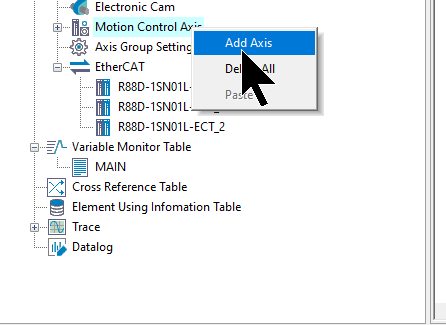
Axis_0 という項目が表示されていれば、軸の追加が正常に完了した証拠です。
構成
先ほど追加した軸をクリックします。これは軸パラメータ(Axis Configuration)の設定画面で、AutoShopは追加した軸にどのEtherCATスレーブ(サーボ)とどのプロセスデータを対応させるかを決める重要な画面になります。
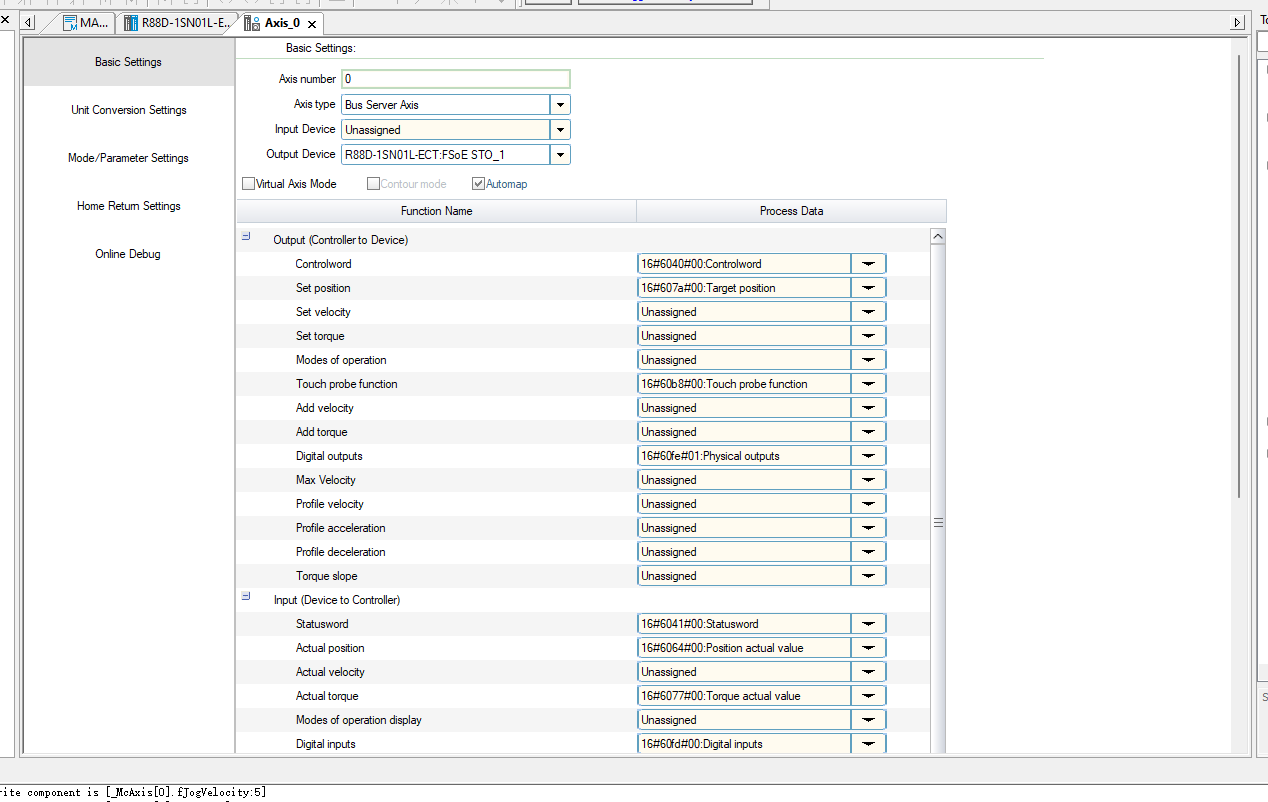
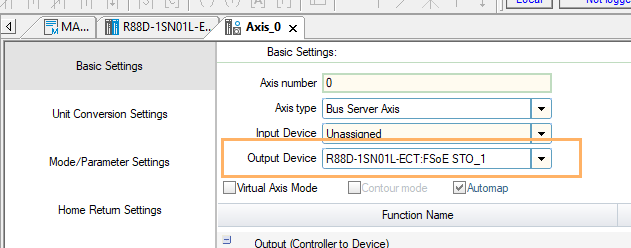
Output Device
Output Deviceは、「この軸(Axis_0)が、どのEtherCATスレーブ(=サーボドライブ)に指令を送るか」を指定する項目になります。ここで指定されたデバイスが、MC_MoveAbsolute などのFBからの指令を受け取る物理的なサーボになります。
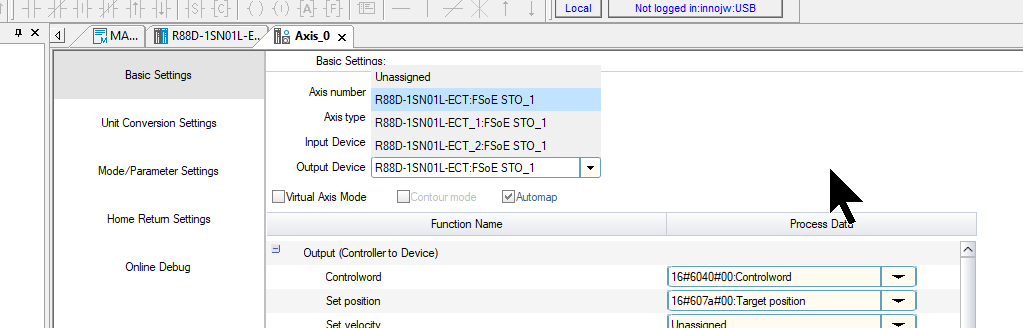
このリストには、EtherCATスキャンで検出された複数のOMRONサーボドライバが表示されていています。アプリケーションに合わせて設定してください。
どこのサーボがどの軸に割り当たるかを、物理構成(配線順やノードアドレス)と対応させて確認することが大事です。たとえば、1軸目のX軸として使いたいサーボが ECT_1 なら、それをAxis_0の「Output Device」に選択します。
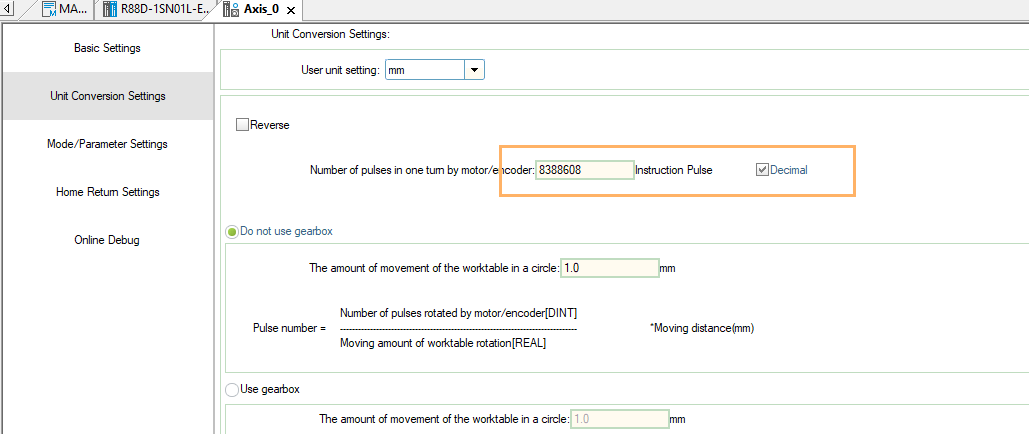
ユニット設定
この画面は「Unit Conversion Settings(単位変換設定)」で、モーション制御で「どの単位で位置や速度を扱うか」を定義します。
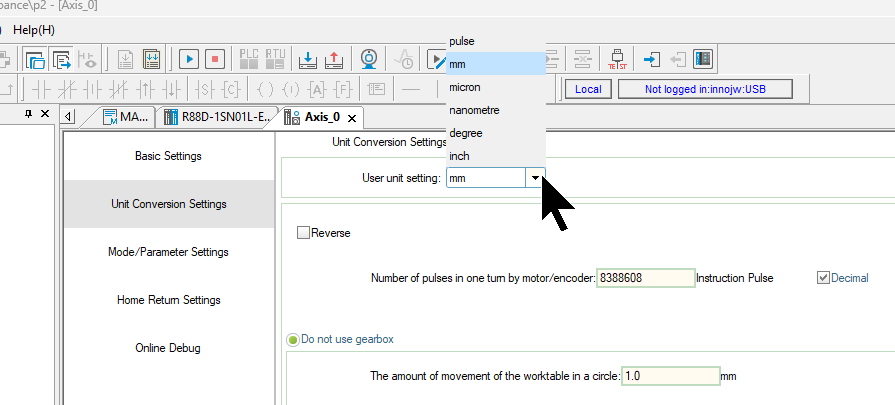
次はパルス数と移動量の関係を決めます。ここはエンコーダ1回転あたりに出力されるパルス数(指令単位)を設定する項目になり、例では 8388608 に設定します。
エンコーダモード
エンコーダのタイプを設定します。
- Incremental Mode(インクリメンタル):電源OFFで位置がリセットされる
- Absolute Mode(アブソリュート):電源OFF後も位置情報を保持
今回の記事で使用したオムロンのR88 Servo モーターはAbsoluteエンコーダを使用しています。

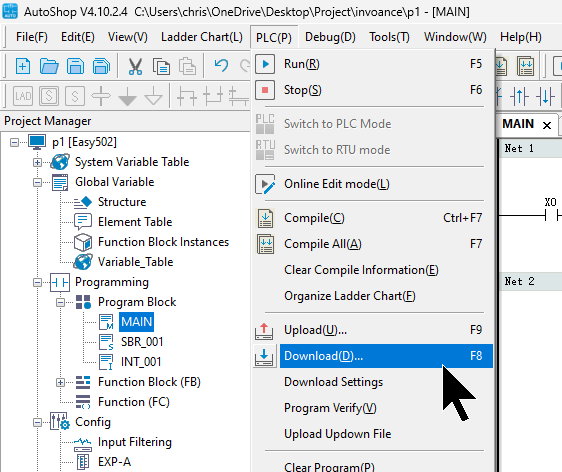
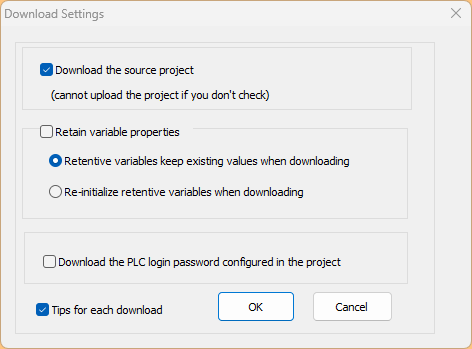
ダウンロード
最後はPLC>DownloadでプロジェクトをCPUにDownloadしましょう。
OKで進みます。
OKでCPUをストップします。
そしてDownloadが終わったら、またOKをクリックしCPUをRUNにしましょう。
Trace
トレース(Trace)機能を使用し、モーションの動きをリアルタイムで可視化します。
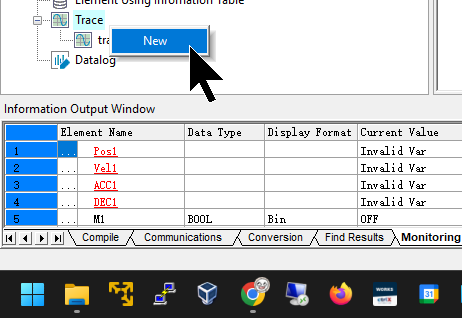
Traceツリーで右クリック →「New」を選んで、新しいトレース設定を作成します。
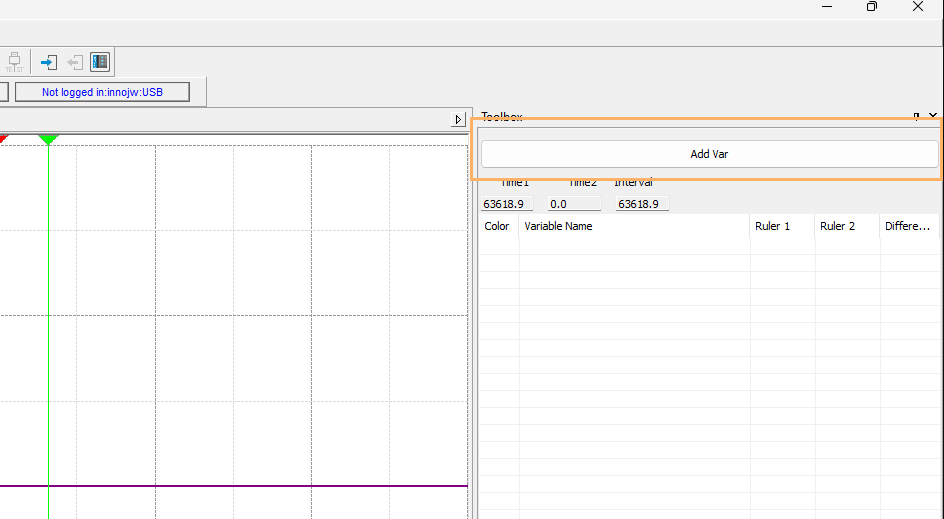
こちらはAutoshopのトレース画面になります。
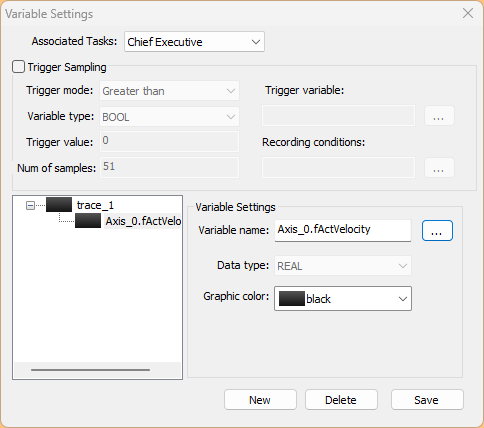
「Add Var」にモニタしたい変数を追加します。
こちらは変数の追加画面になります。
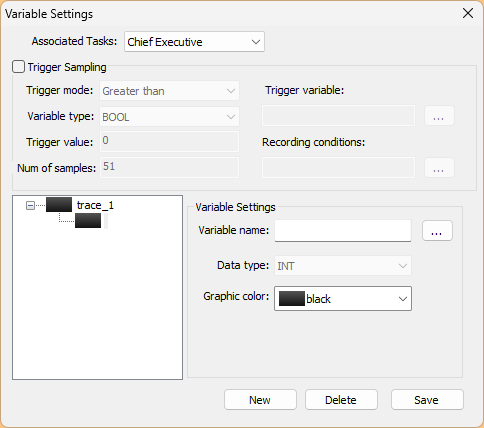
変数選択ボタン(…)を押し、AutoShop上で使用可能な変数一覧から選択式で変数を追加できる画面が開きます。
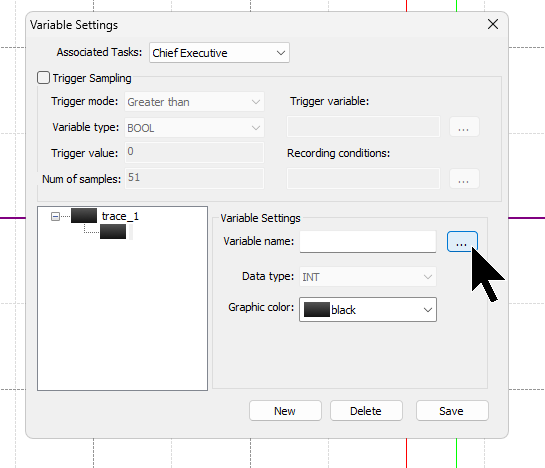
変数の選択画面が表示されます。
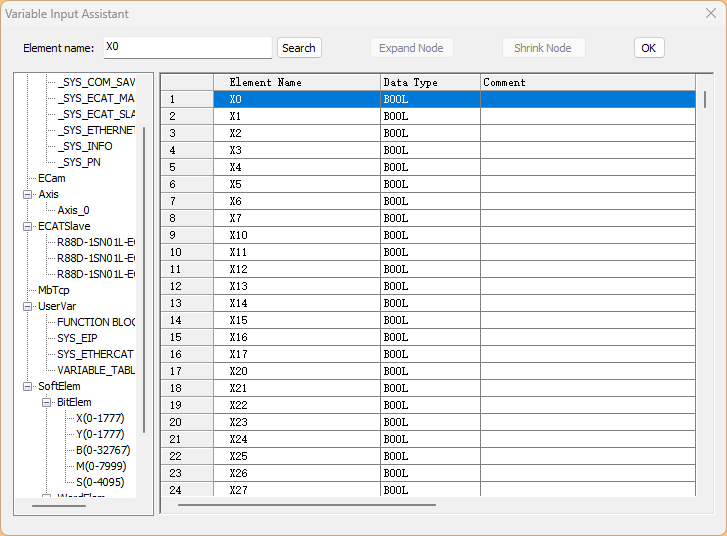
AutoShopの「Variable Input Assistant」が表示され、ここから直接Axis0の変数を選択できます。
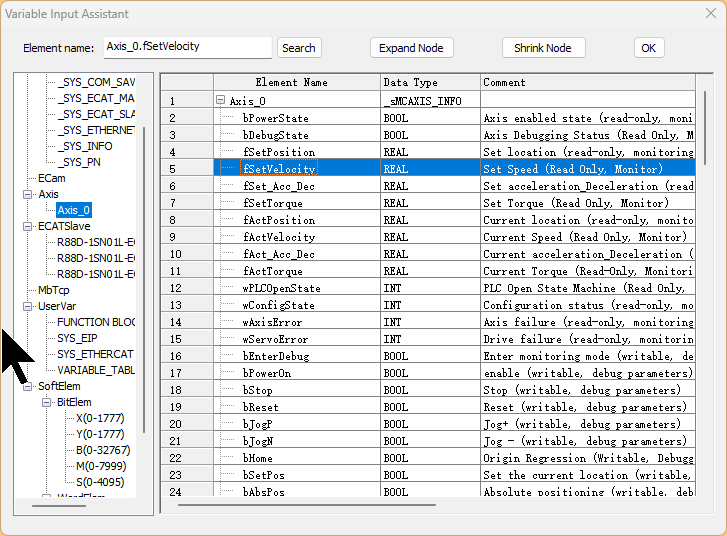
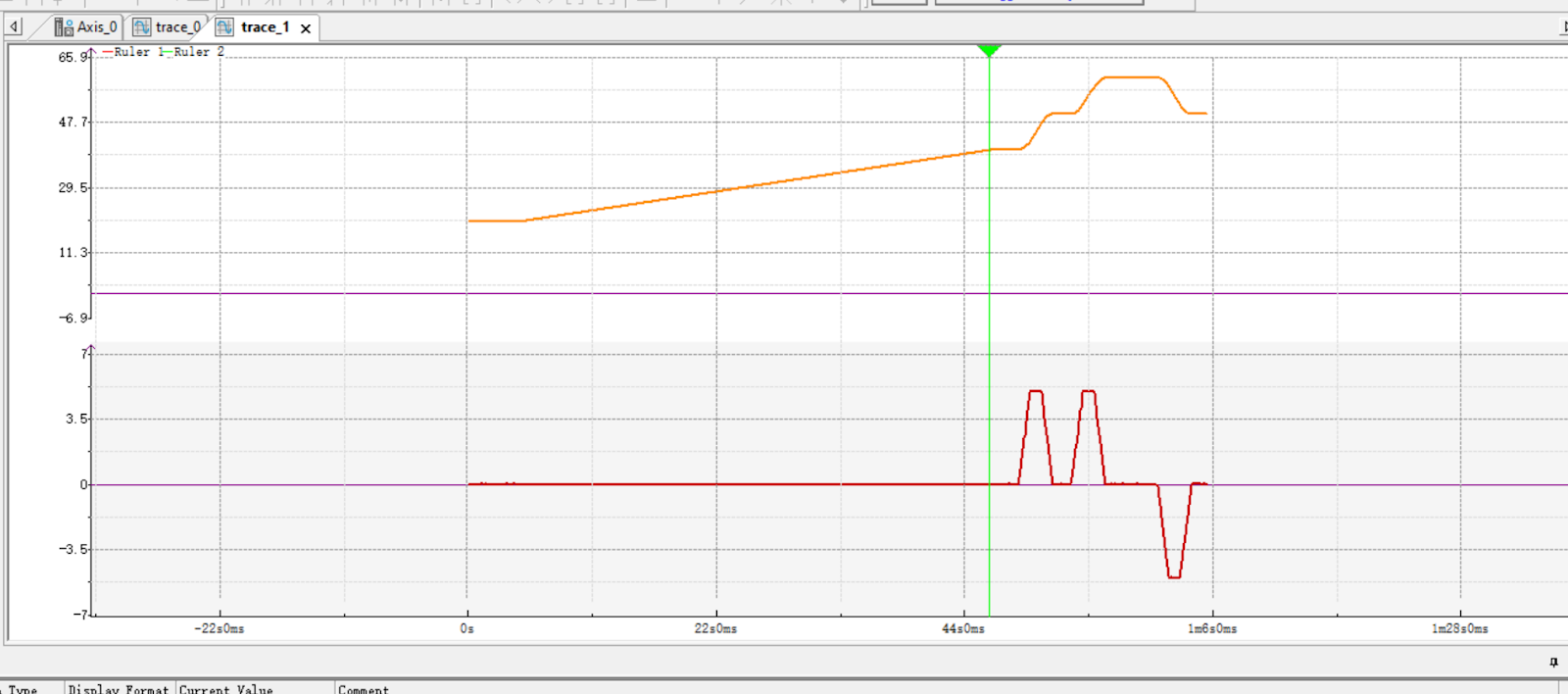
下図ではAxis0の現在速度を設定しました。
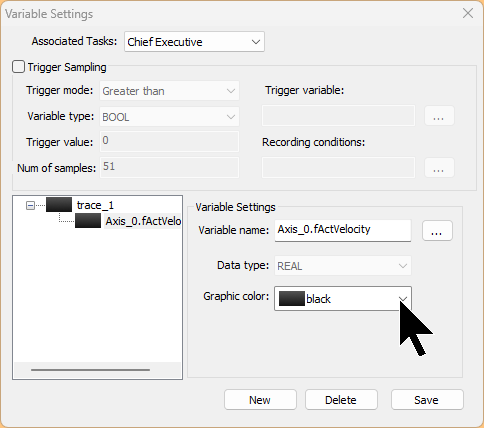
Traceの色も自由に変更できます。
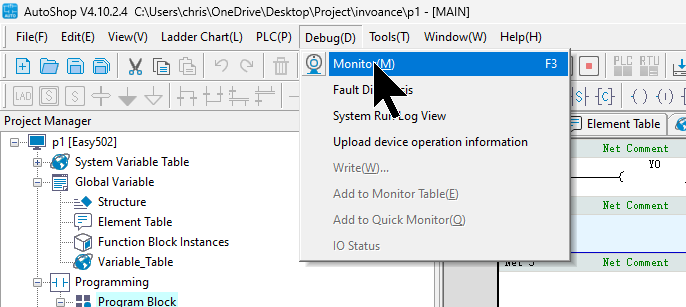
モニター
現在プログラムの実行状態を確認したい場合は、Debug>Monitorをクリックします。
結果
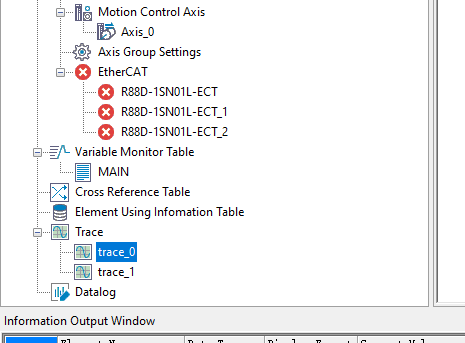
もしEasy PLCとEtherCAT間の通信が成立してない場合、下図のような赤バツマークがついています。
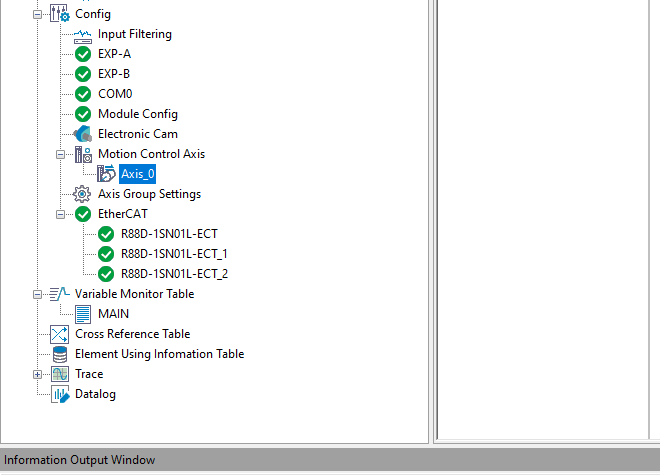
下図はマスター(Easy PLC)とスレーブ(OMRONサーボ)の通信が確立して、デバイスの状態が取得できている状態です。
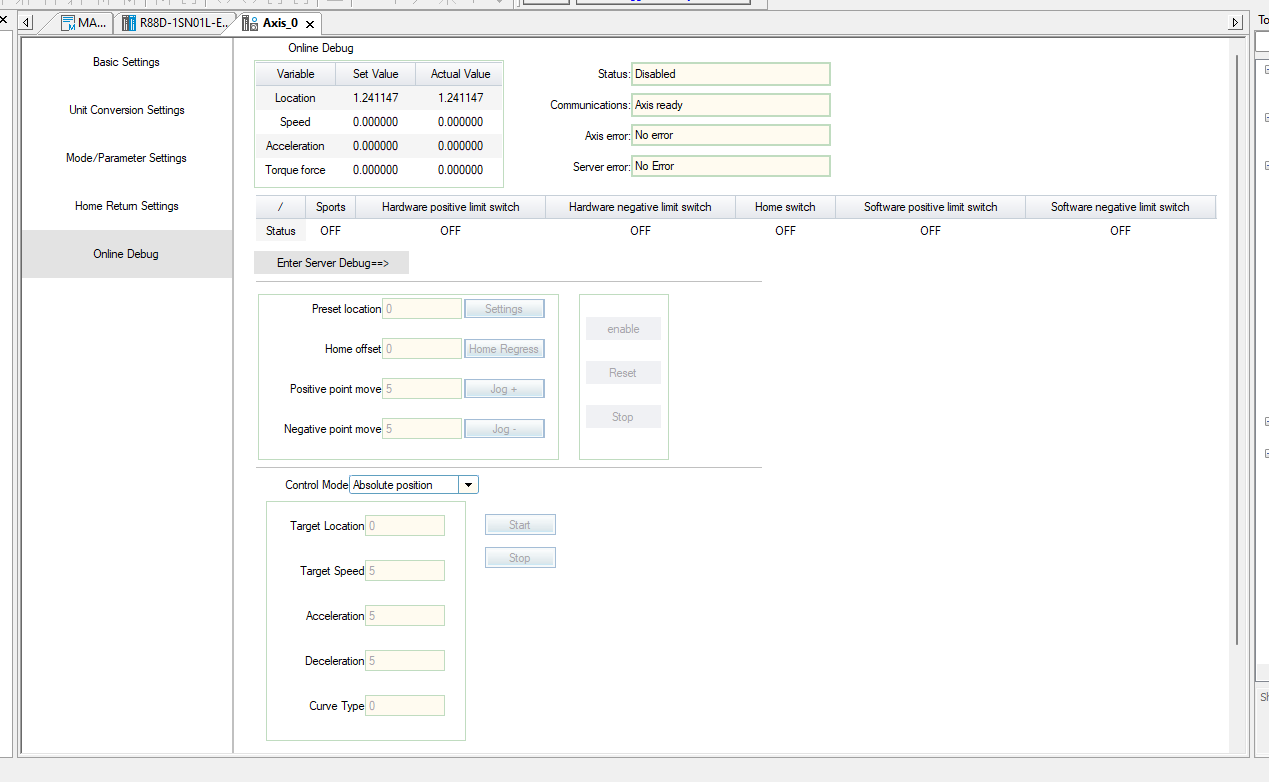
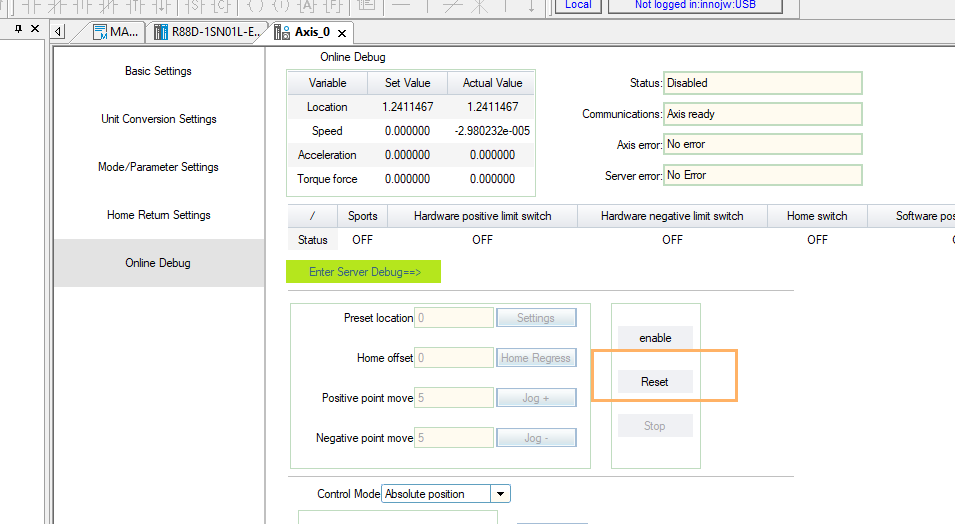
次はAxis0をクリックし>AutoShopの「Online Debug」画面での軸動作テスト画面に移動します。ここから直接、軸をJog(手動移動)したり、位置指令で動作させたりすることができます。
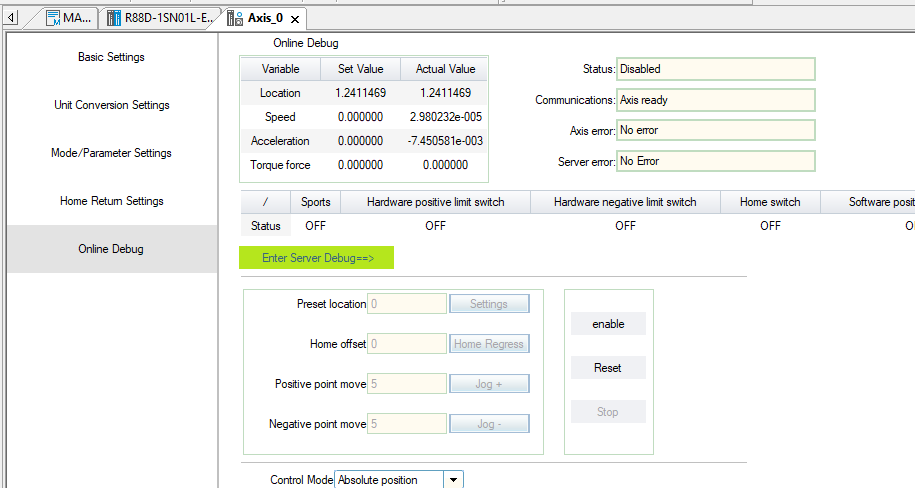
Enter Server Debugをクリックし、ツールから直接Servoを操作します。

Done!
Resetボタンをクリックし、Servoをリセットします。
Enableボタンをクリックし、Servo ONします。
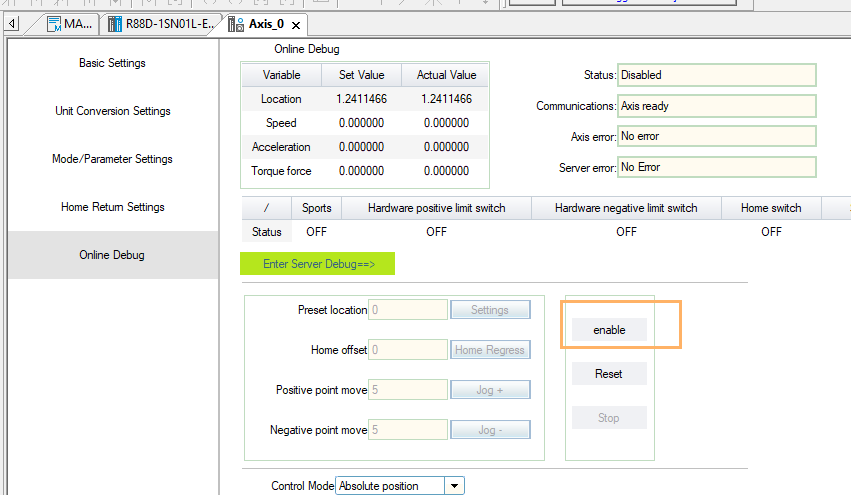
実機の動作確認は、YouTube上にアップロードしたデモ動画にてご確認いただけます。
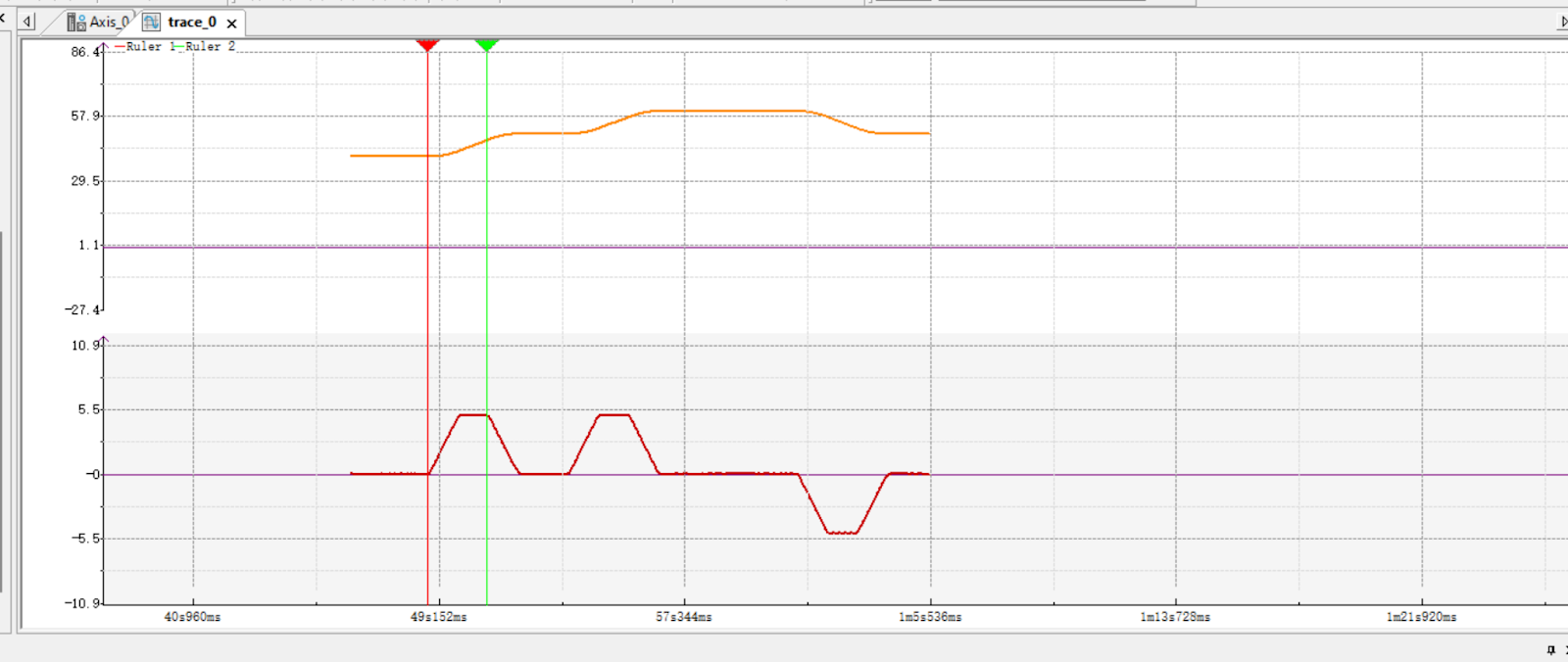
Trace機能を使用し、現在Servoの状態をリアルタイムでMonitorしたい場合、Trace画面に右クリック>Download Trackingをクリックします。
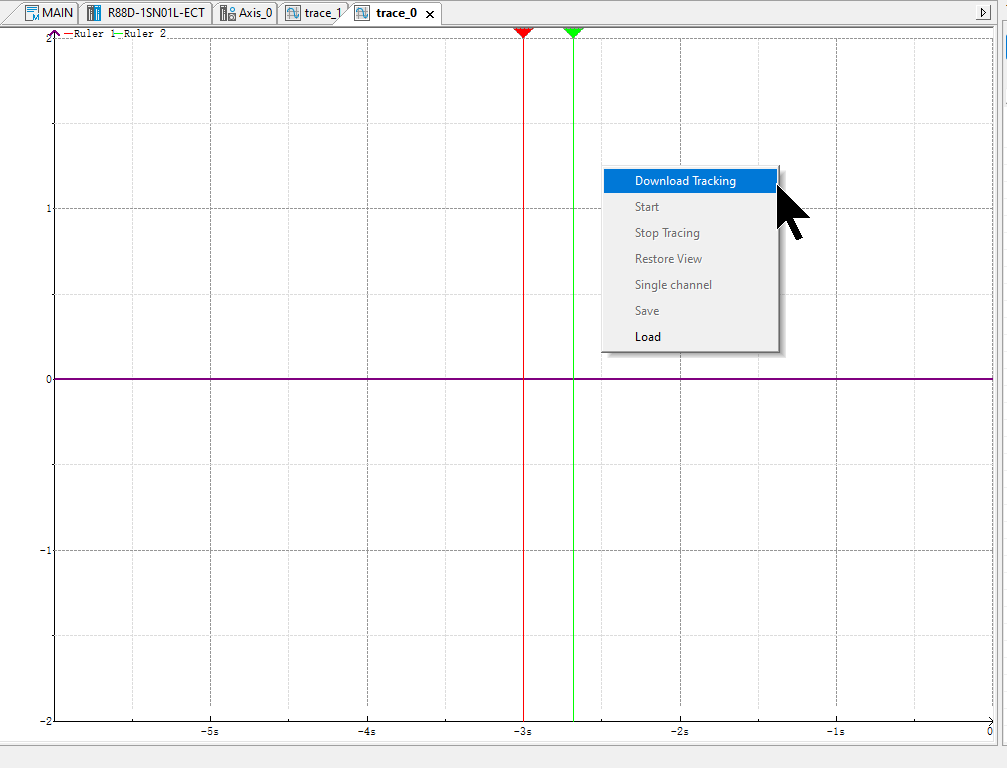
Done!それだけで変数のリアルタイム監視できます。
LoggingしたTraceを保存したい場合は右クリック>Saveします。
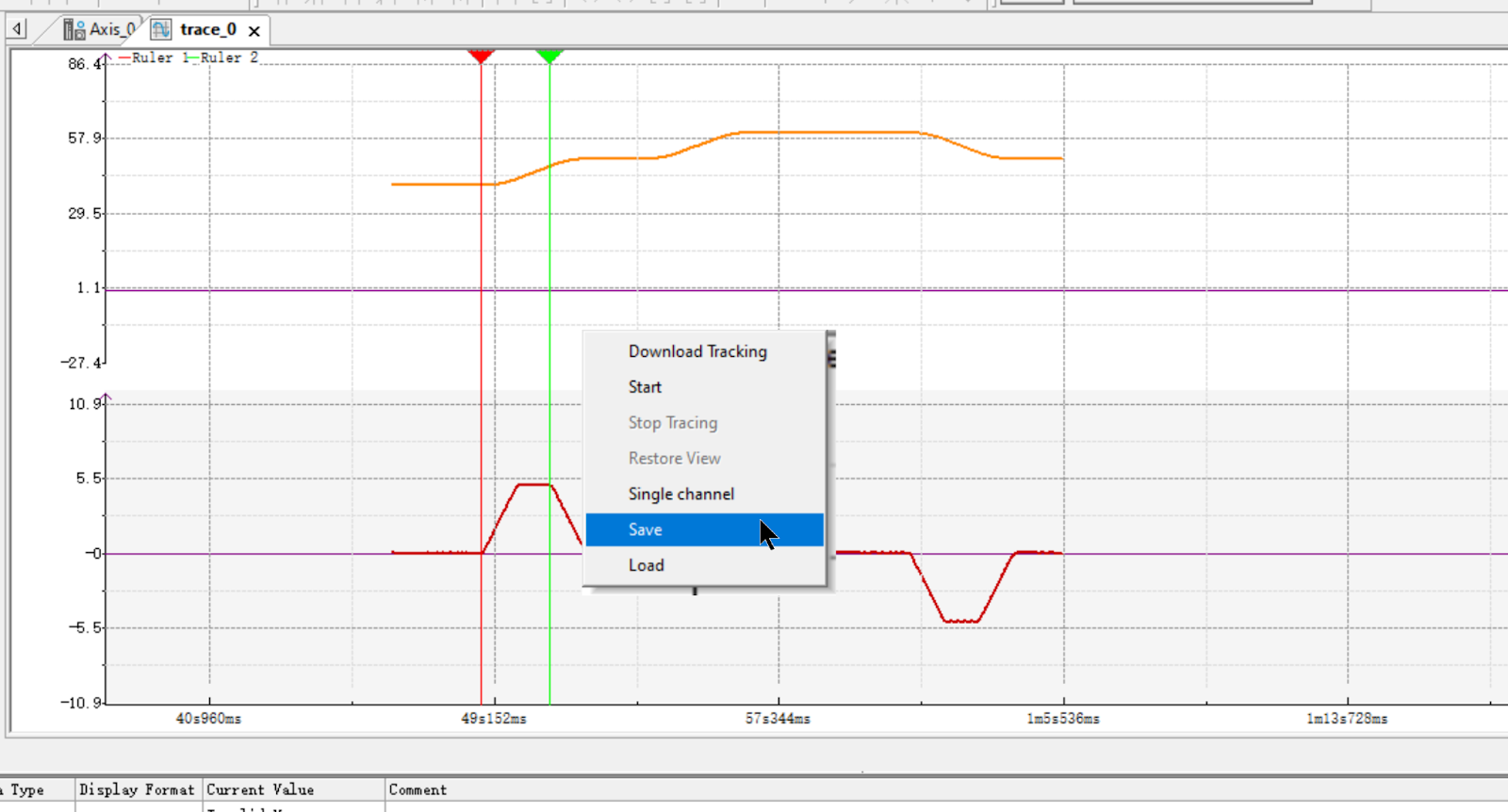
XML Formatとして保存可能です。
ツールから保存したTrace Fileを開きたい場合は右クリック>Loadします。
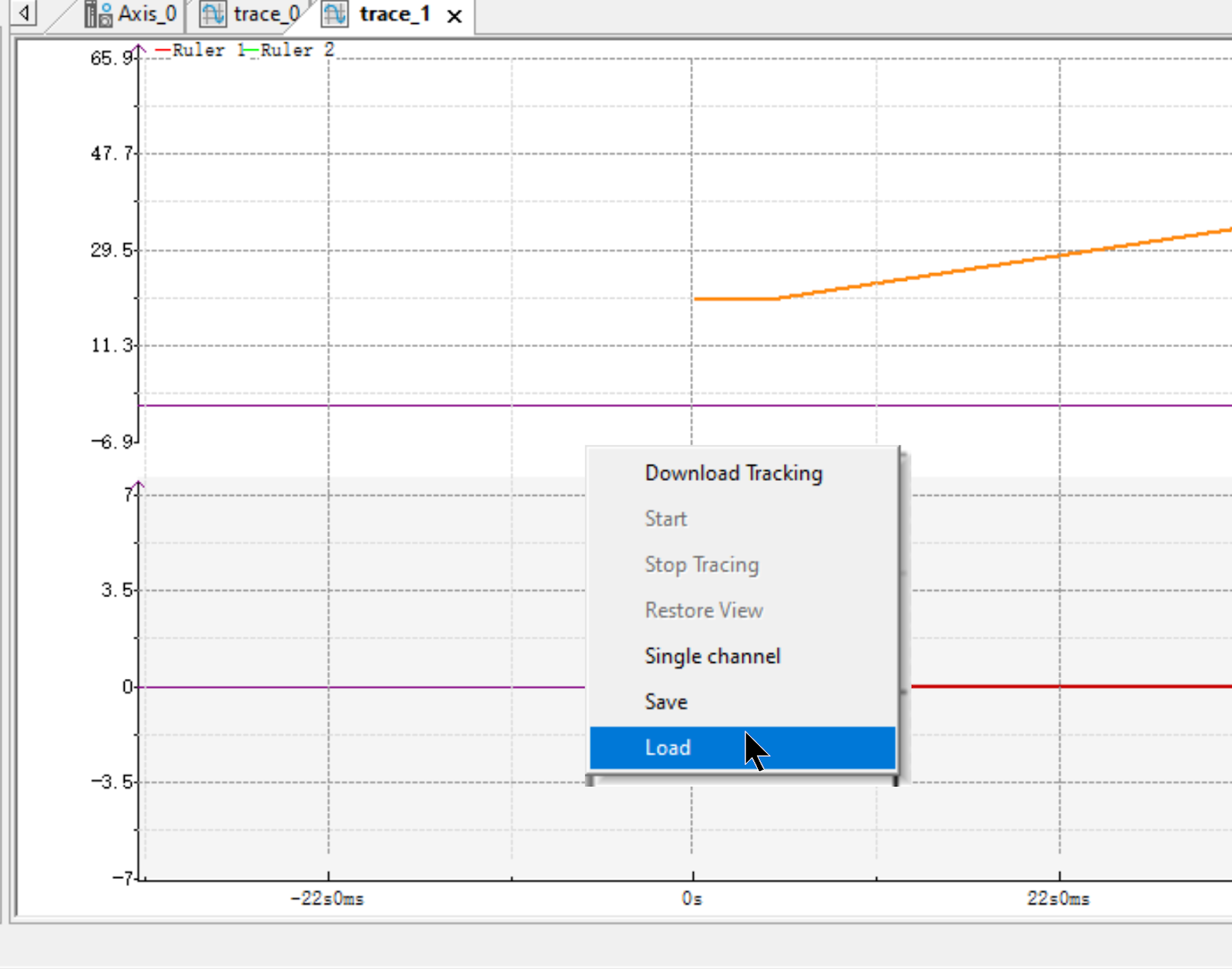
Done!