前回は2D のTransformation Matixについて話しますが、次は3D Object Transformation Matrixですね。難しいそうですけど、できるだけ簡単でメモしようと思います。
3D空間でObjectを定義するにはいくつの変数が必要になるでしょうか。
正解は6つです。
[x,y,z]はObjectのPositionです。
[α,β,૪]はObjectのOrientation(向き)です。
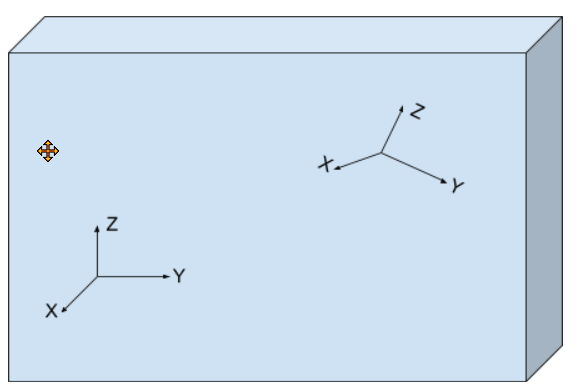
ここにはx,y,zがあります。3D Objectではそのモデルで表現されます。
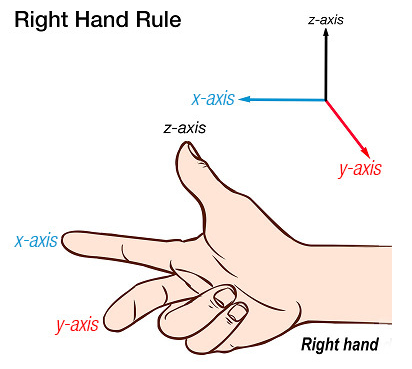
Right-Hand-Rules
次はそのルールについて話しいます。
https://www.pasco.com/products/guides/right-hand-rule
三本の指で3つのAxisが表現されています。
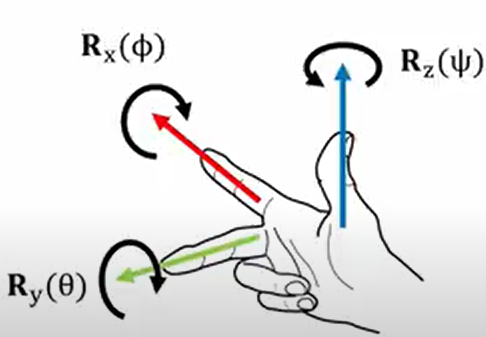
そしてRx(Φ),Ry(θ),Rz(ψ)と3つの数値で回すの角度を示しています。
Rx(Φ)はRollです。
Ry(θ)はPitchです。
Rz(ψ)はYawです。
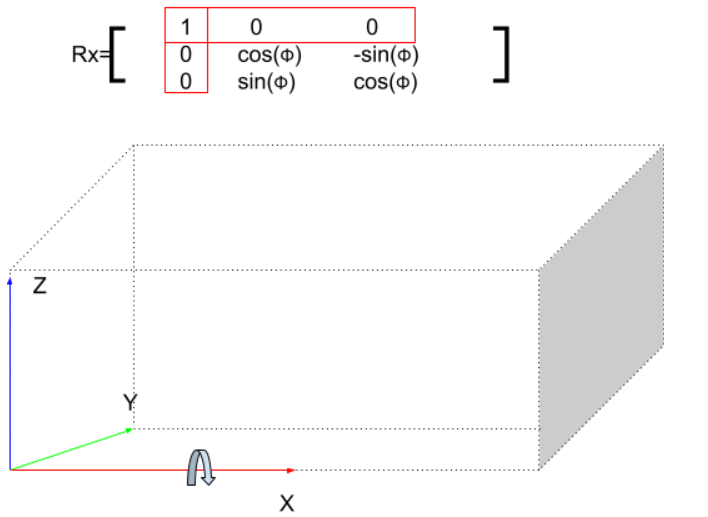
X Axis(Roll)
では、x軸が回転すると想像しましょう。
Xが回転してるってことはXが不変でYとZが変わってしまうのです。
その変わってしまうの計算は2D Object Transformation Matrixですね。
なので、3×3のMatrixはこうになります:
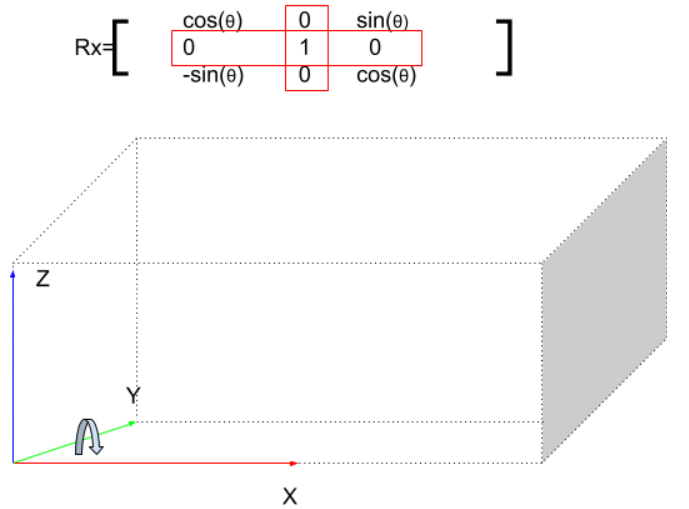
Y Axis(Pitch)
次はY軸です。X軸の回転と同じ不変になったのはYだけですね。
なので、3×3のMatrixはこうになります:
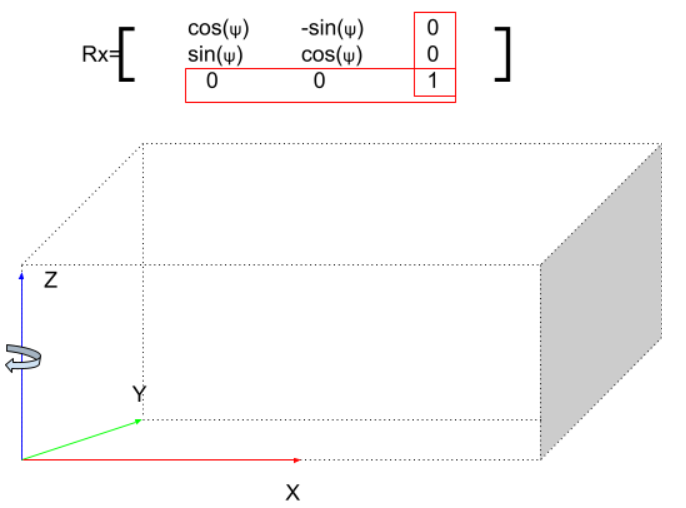
Z Axis(Yaw)
最後はZ Axisですね。
Rotationの表現
1つのRotationは最大3つのPatternがあります。
R(Φ,θ,ψ)
これらのRotationはどんな順番でもOKですが、一回目と二回目は同じ軸回転はNGです。
なぜかというと、R(Φ)R(Φ)=R(2Φ)です。
Total Pattern:3x2x2=12です。
xyz yxz zxy
xzy yzx zyx
xyx yxy zxz
xzx yzy zyz
ですね。
Euler Angles
すこく簡単にいいますと、最初と最後を回転したのは同じの軸のことです。
なので、
xyz yxz zxy
xzy yzx zyx
xyx yxy zxz
xzx yzy zyz
3x2x1=6組になります。
Cardan Angels
こっちらは回転する軸全部違うのことです。
xyz yxz zxy
xzy yzx zyx
xyx yxy zxz
xzx yzy zyz
計算
最後に、R(AB)=Rx(Φ)Ry(θ)Rz(ψ)だとします。
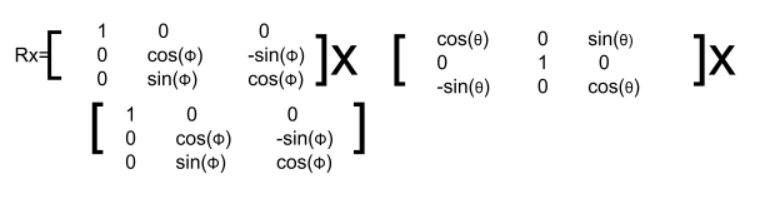
すべての式の結果はWikiに乗っています。
https://en.wikipedia.org/wiki/Euler_angles

では、T(source-Target)=(x,y,z,α,β,૪)となっており、式はこうになります。
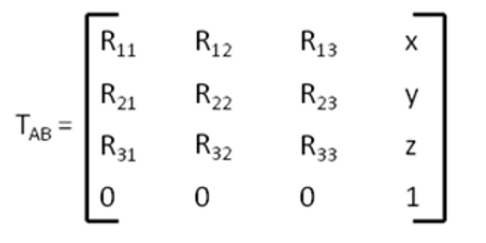
はーい、お疲れ様です。
Reference
https://www.mathsisfun.com/algebra/matrix-inverse.html
https://www.rosroboticslearning.com/rigid-body-transformations
https://math.stackexchange.com/questions/1090451/why-is-ab-1-a-1b-1