みんなさんこんにちわ。今回はPRの登録などもう少し見に行きたいです。
PR=Position Registerのことは英語通り位置を記録する場所になります。前の記事と同じようにJogで移動してもよいし、PartsのMoveToで様々な方法もあります。説明するなら一番簡単な方法にしますー。
PR登録
Teach Pendantを起動します。

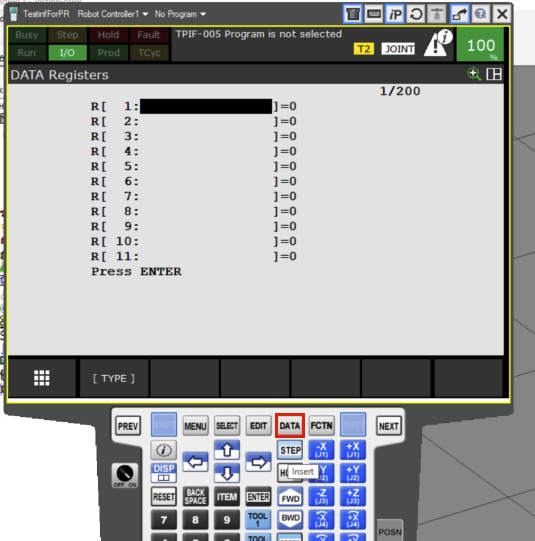
Dataボタンをクリックし、Data Registers画面に移動します。
[TYPE]ボタンをクリック設定のRegister種類を変更します。
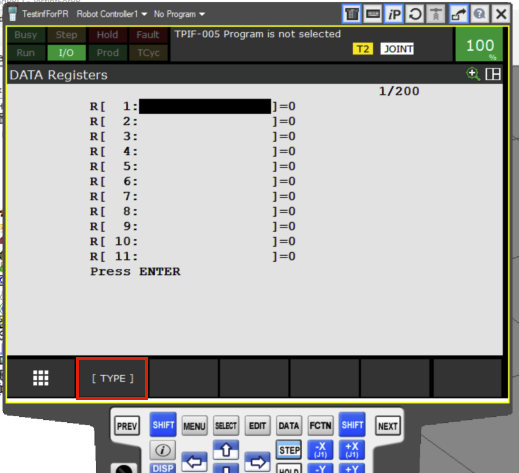
2番めのPosition Registerを選びます。

Jogでロボットを好きな場所に移動し、SHIFT+RECORDで記録します。

前の記事にも書きましたが、それでPR1が先の位置を記録しました。

Positionの名前を入れます。
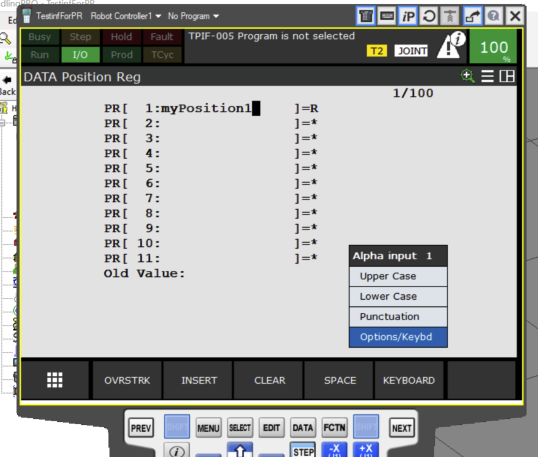
RecordされたところはRがついています。
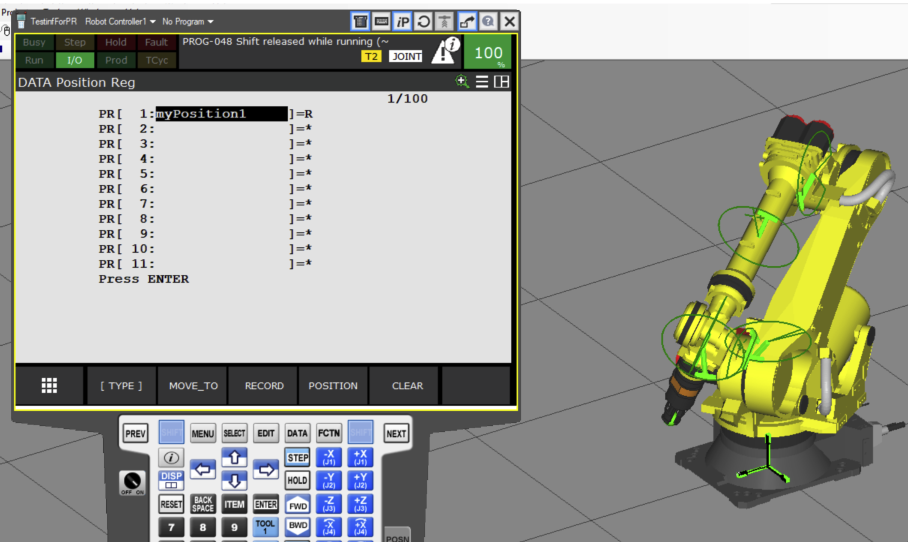
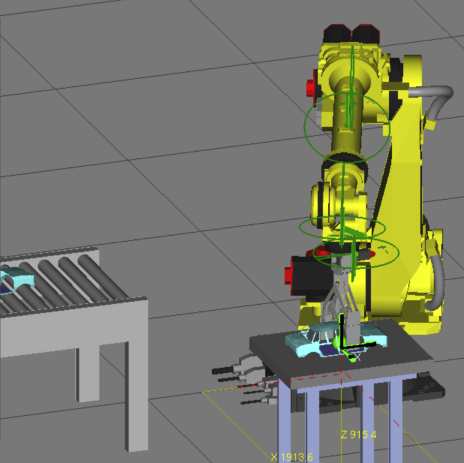
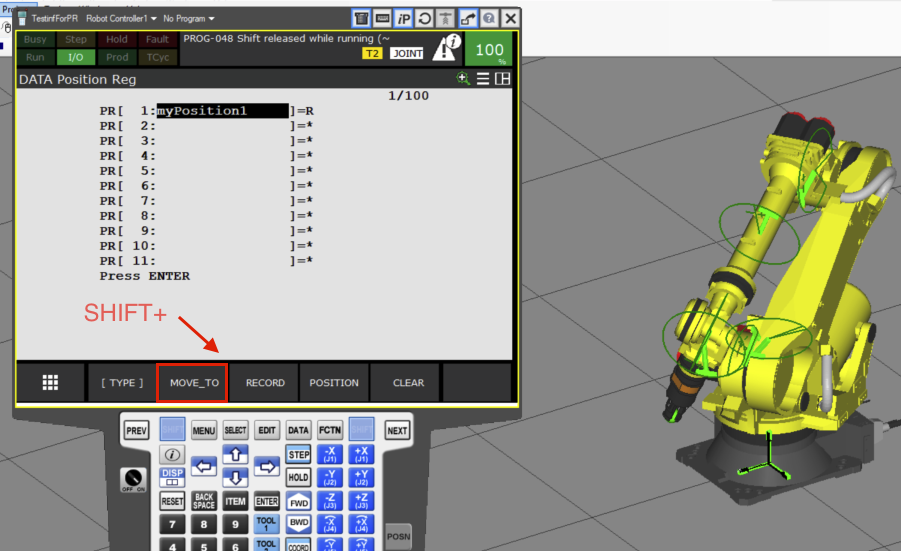
MOVE_TOで確認
ロボットを別の場所に移動し、
ModeをT2に切り替え、SHIFT+MOVE_TOを押します。
そうすると、ロボットが先Teachingされた座標に戻ります。

POSITION値確認
Position Register画面に戻り、POSITIONをクリックします。

CONFボタンをクリックするとXYZWPRが表示されます。

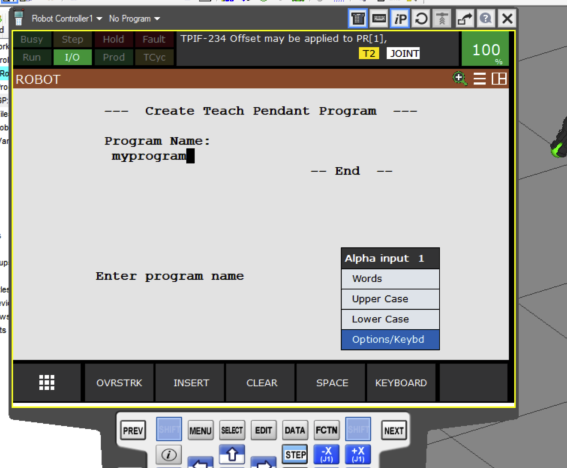
プログラム作ってみよう
SelectボタンをクリックしROBOT Select画面に戻ります。CREATEボタンを押します。

プログラムの名前を入れます。
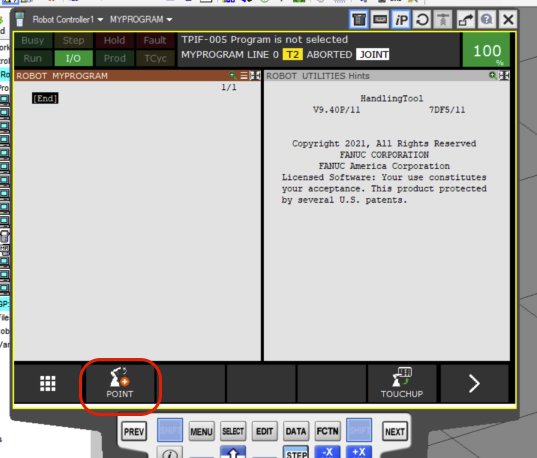
右矢印をクリックします。

Point+のボタンを押します。
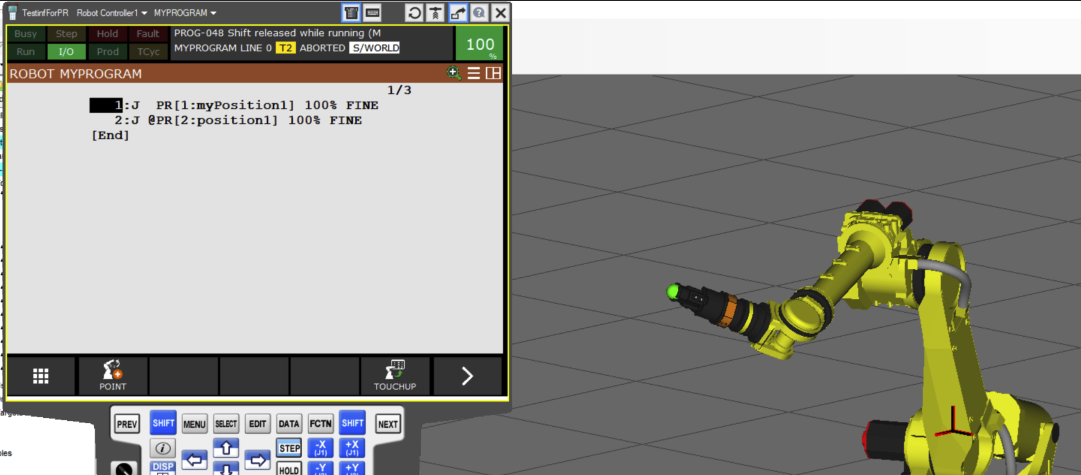
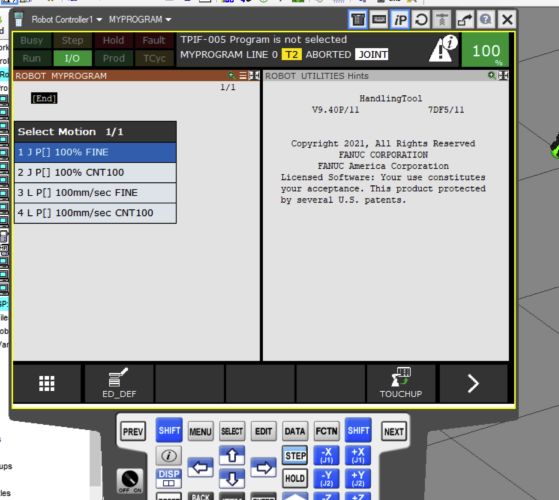
そうするとSelect MotionのSub-画面出てきます。今回はとりあえず1番の 1J P[] 100% FINEでOKです。
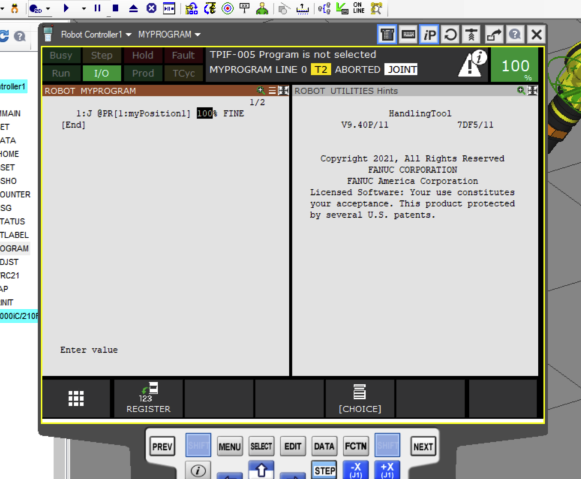
CHOICEボタンをクリックします。

2番目のPR[]を選びます。

次はPR[…]はPR番号になりますね。先追加したPosition1を入れましょう。ここで数字1入れるだけでOkです。

画面で自動的に1:myPosition1に変更します。
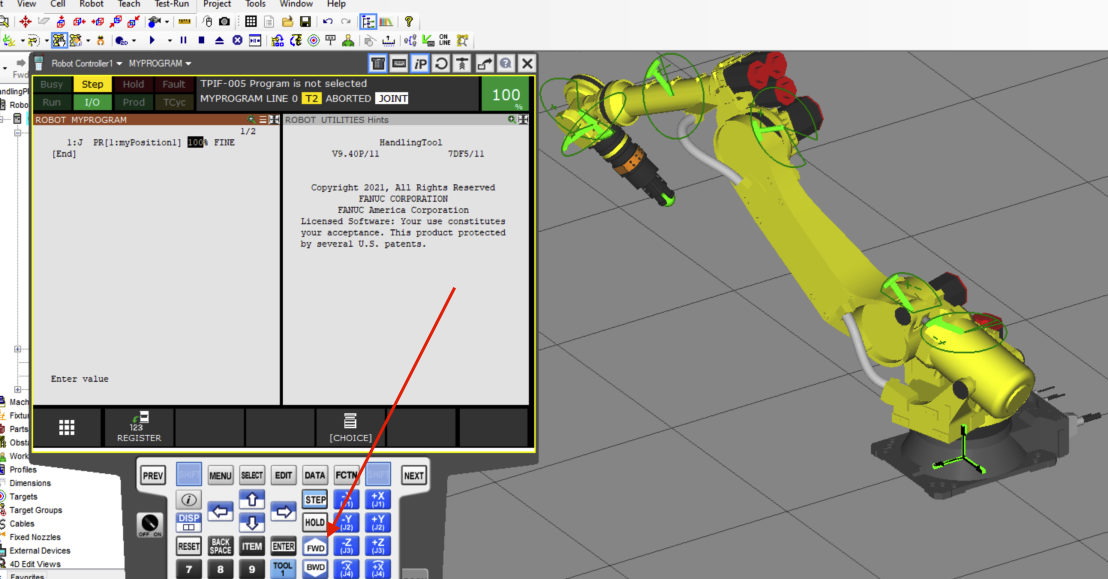
プログラム実行
Jogでロボットを他の位置に移動し、Teach PendantでSHIFT+FWDボタンをクリックしてみましょう。ロボットはあなたの言う通りPosition1に戻るはずです。
Speed
もし速度遅いと思うなら、+%と-%で調整しましょう。

最後に
はーい、お疲れ様ーです。
みんなさんがPosition Registerをたくさん追加し自分だけの動きを作るのはどんどんチャレンジしましょう。
このシリーズではFANUCのロボットとROBOGUIDEを使用について勉強用のメモになります。あくまでも個人的書いてたものなので、実際使うときには安全を注意し、経験あるエンジニアと一緒に作業してくださいね。