Visual Components のTutorial第3話です。今回はロボットのPath生成について紹介します。さ、はじめよう!
Your Target
このTutorialの最後に、あなたのロボットもこのようなPathを生成することができます。
Reference Link
Start your Application!
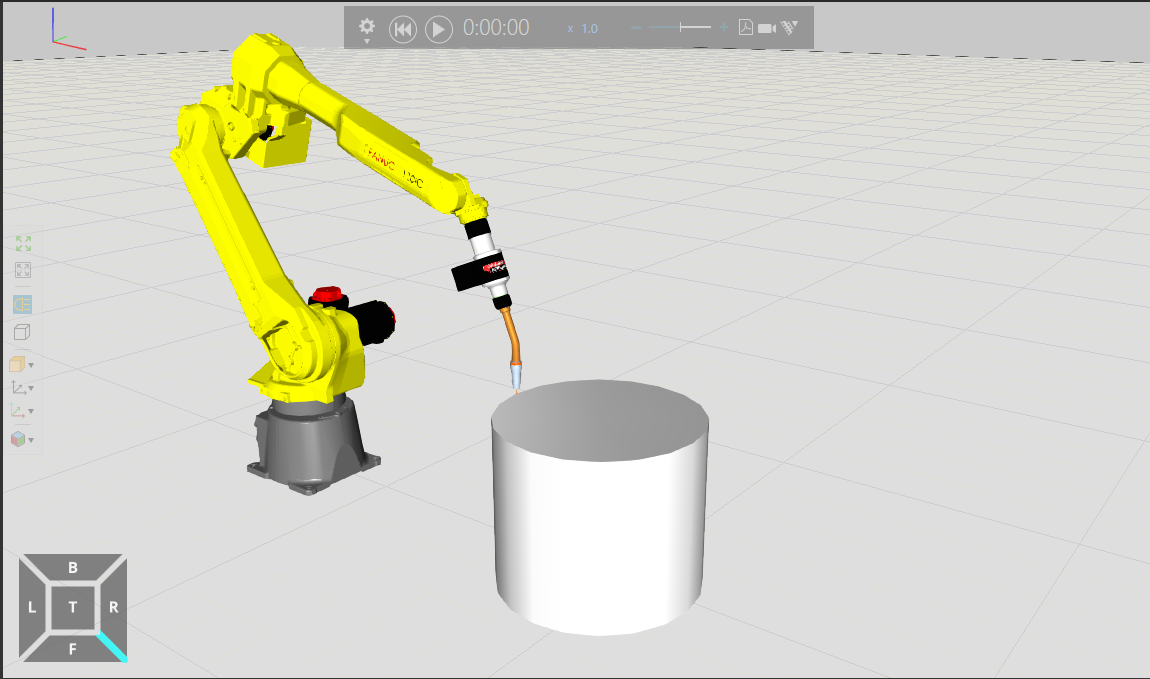
こちらは今回のLayoutになります。
Add Tools
eCatalogからModels by TypeでModelを分類します。
Robot ToolsからWelding Torchの溶接ツールを追加します。

Add Cylinder
今回はCylinderを追加します。
Visual Components>Basic Shapes>Cylinder Geoを追加し大きさを調整しましょう。

Add Program-1
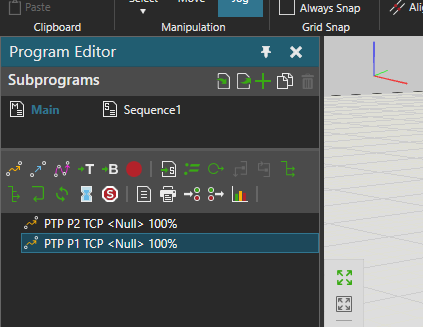
次はロボットプログラムを追加します。下図にはPTP P2とPTP P1しかありません。
- PTP P2は作業前の待機位置
- PTP P1は作業後の待機位置
になります。
Add Path Statement
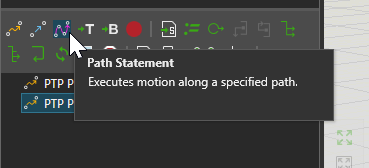
ロボットにCylinder Geoに沿って移動するPath Motionを作成します。
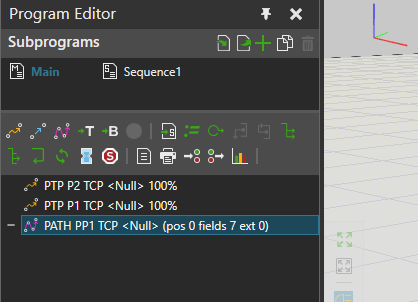
”Path Statement”をクリックしプログラムにPath Statementを追加しましょう。
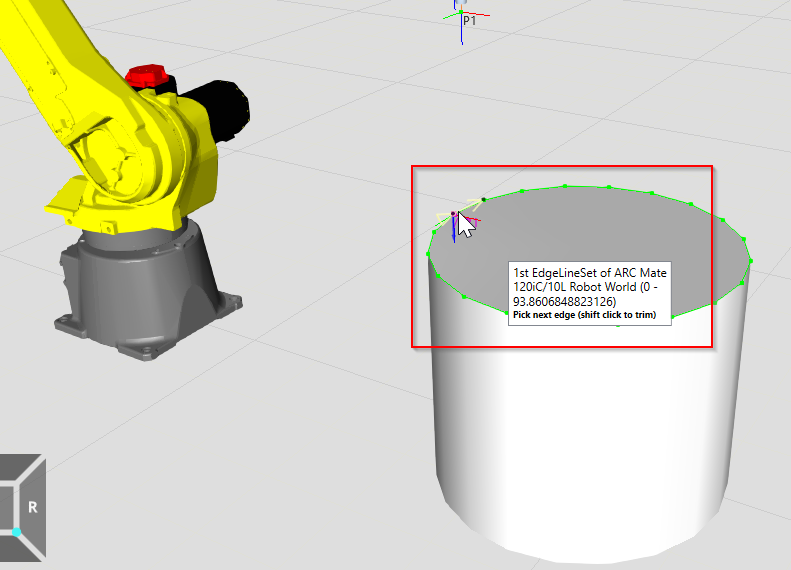
Done!ですが、それだけではまだ足りないないので、Pathの移動Pointを指定する必要があります。
いまCylinder Geoの縁ではいくつの点があるかわかりますか?

Mouseにその点をクリックすればPath内の移動Pointを指定できます。
次はPink色の矢印が見えますか?つまりPoint1とPoint2は矢印の方向(下図では時計回り)で進むことになります。
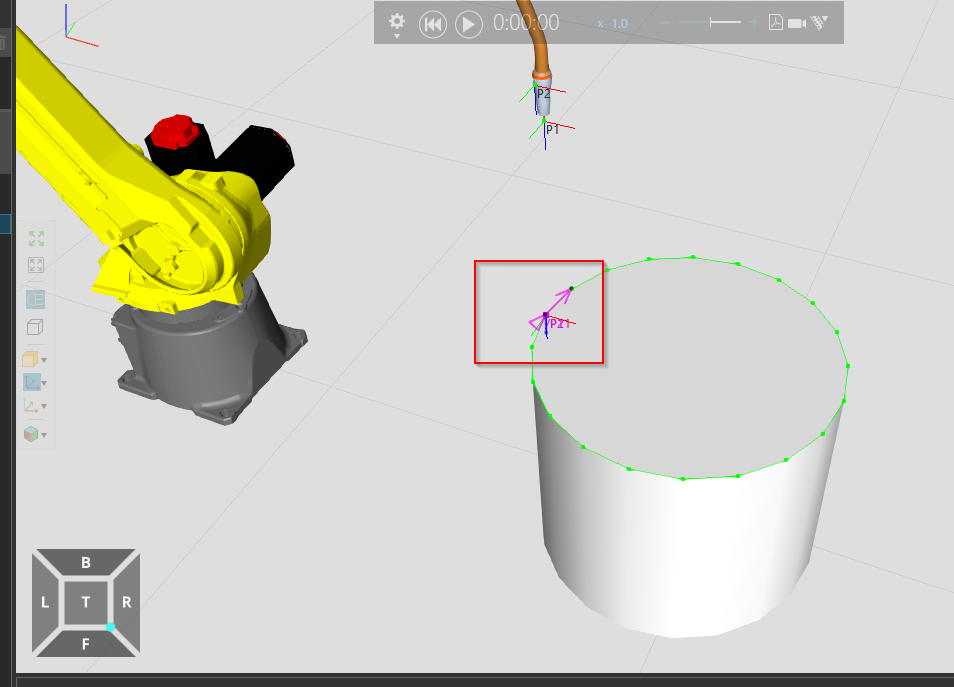
このように指定する方向とPointを指定していきましょう。
Visual ComponentsではPath内の点を指定するにはMouse Clickするだけで完結できます!

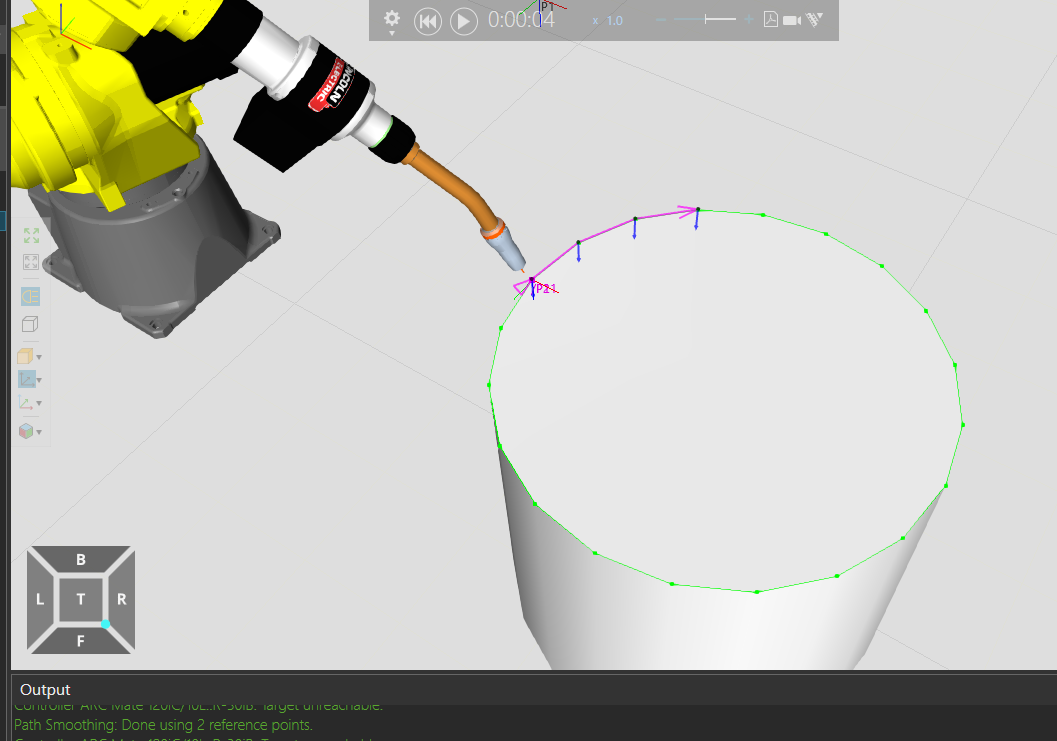
よし、これでCylinder Geoの縁一周を周りました。
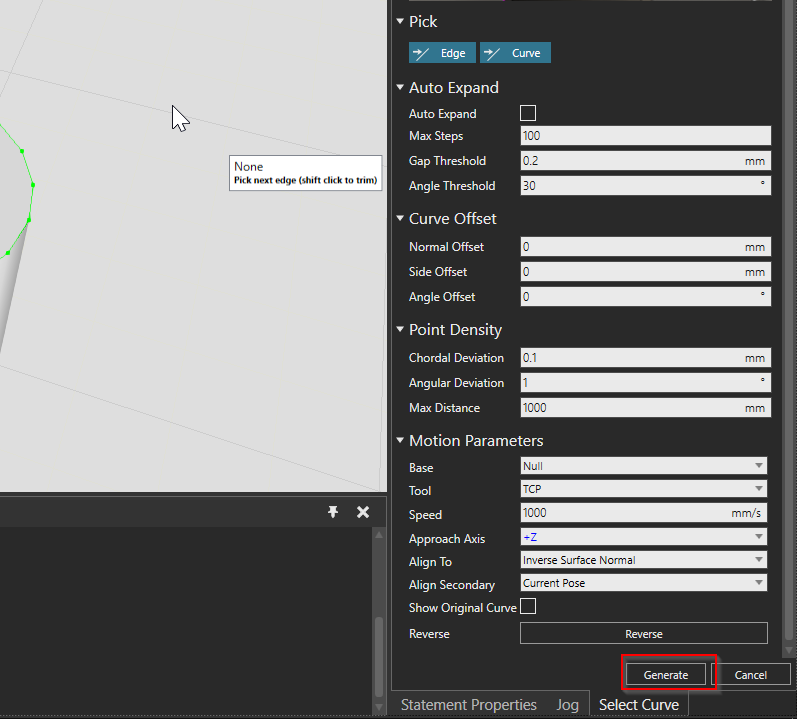
実際アプリケーションによってPointsの数、角度、速度、間隔を細かく設定できるのはVisual Componentsの優秀なところです。

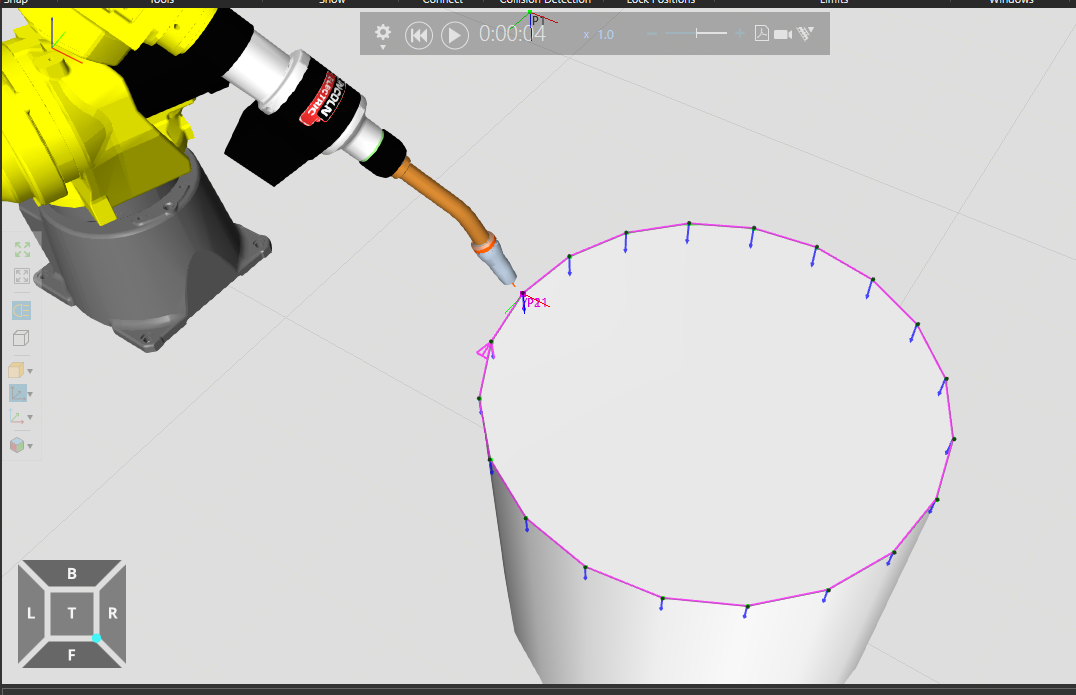
パラメータが問題なければGenerateボタンでPathを生成しましょう。
Done!

Arrange the Program
生成されたPATH StatementをPTP P2とPTP P1の間に移動します。
つまり、待機>Path 移動>待機の動きになります。

複雑な操作がなく、MouseでDrag and Dropだけでコマンドの移動が可能です。

Test it!
一回テストしてみましょう!
Bonus:Configuration
せっかくなのでVisual Componentsの設定についてもう少しお話ししましょう。ロボットプログラムを作成するときに以下のGIFのような変な動きがあったかもしれませんね。それはロボットの無駄な姿勢変更。
原因はロボットがTCP1つあるだけですが、姿勢が複数で同じようなTCPになることがあります。そして姿勢では各Statementにも設定でき、もしStatement1とStatement2の設定が異なると、無駄な動きになる可能性があります。
PTP P2をクリックしてみます。

右にはStatement Propertiesという設定画面が表示されます。ConfigurationにはいまNDBだと設定していますね。
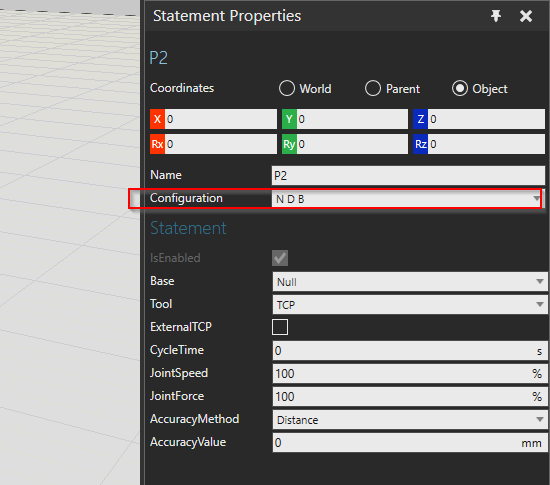
Configurationを変えるだけでロボットの姿勢は100%違いますが、TCPだけは同じPointになっています。
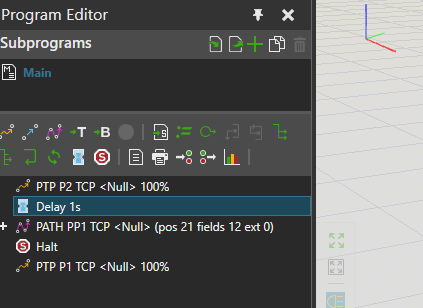
Add Halt
Halt命令を追加します。Halt Statmentを使用すればロボットのSimulationを一時停止することができます。
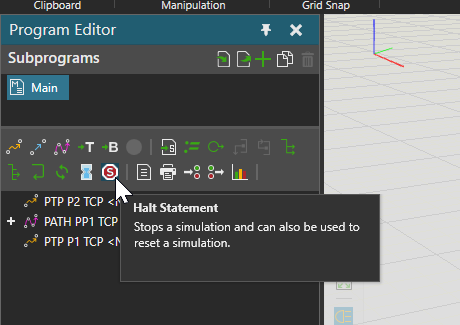
ではPath Statementの次にStatementを追加してみます。

Test it!
下図のように、ロボットのPath Statementが完了したらSimulationが一時停止になり、Play ButtonをクリックすればSimulationまた再開になります。
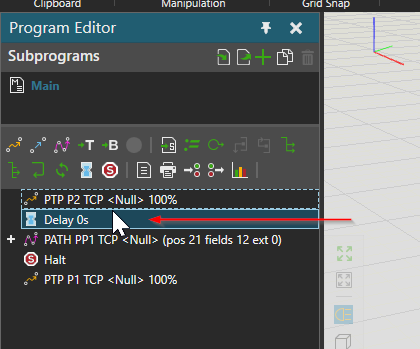
Add Delay
次はDelay Statementです。Delayは単純にStatementとStatementの間に遅延を発生させるだけです。

PTP P2 Statementの次にDelay Statementを入れ、ダブルクリックします。
Statement Properties画面からDelay時間を設定できます。
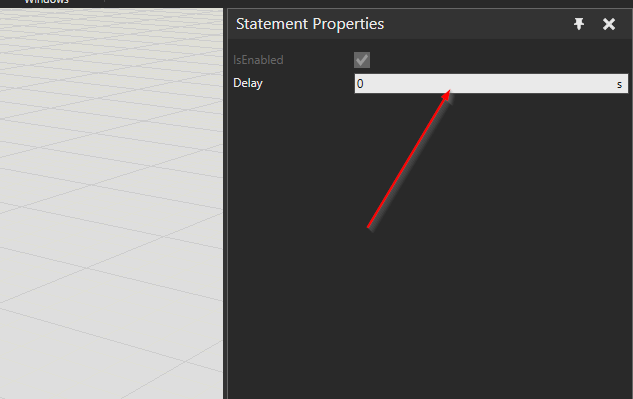
いまは仮に1sを設定していきましょう。
Test it!
少しわかりにくいかもしれませんが、ロボットが1s遅延してからPath Statementを実行するようになりました。
Disable Statement
Visual ComponentsにもStatementを無効にする機能があります。無効したいStatmentを右クリック>Toggle Statementを押します。
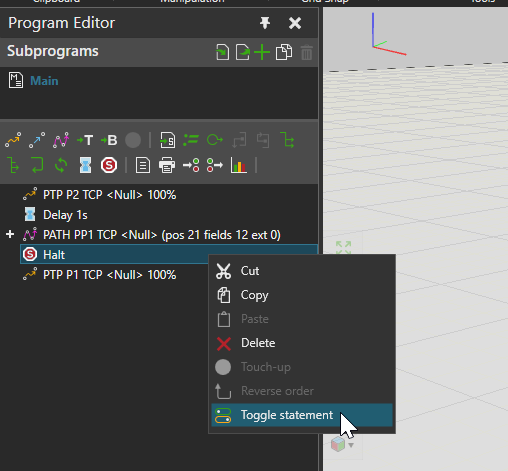
Statementの隣に小さな禁止ICONがついています。つまりHalt Statementがいま無効にされたことを示しています。

Test it!
Done!Halt StatementがSKIPされました。

Print Message
最後はPrint Statementですね。Print Statementを使用すればVisual ComponentsのTerminalに文字出力できます。
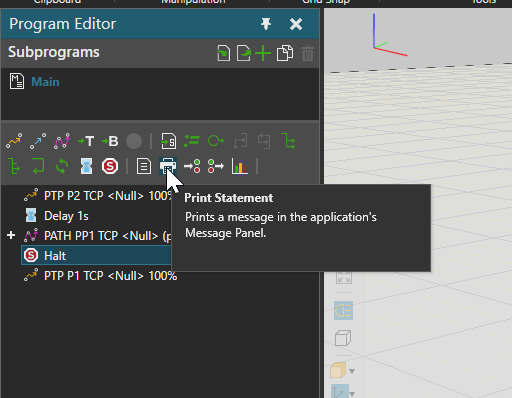
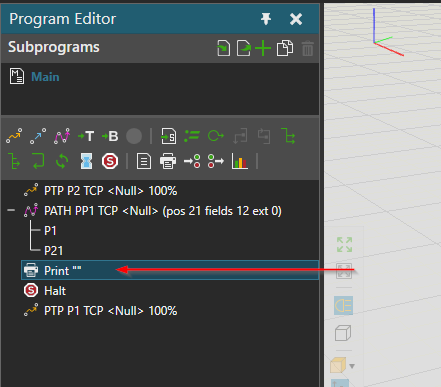
テストするためHalt Statementの前にPrint Statementを追加しダブルクリックします。
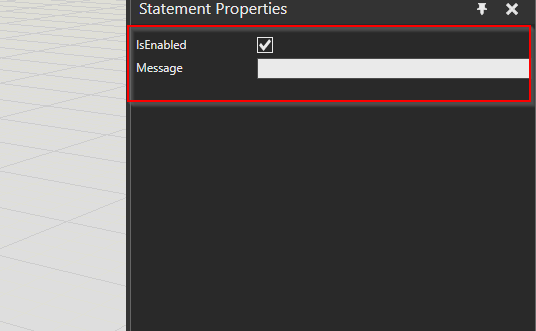
右にStatement Properties画面が表示され、PrintしたいMessageを設定できます。
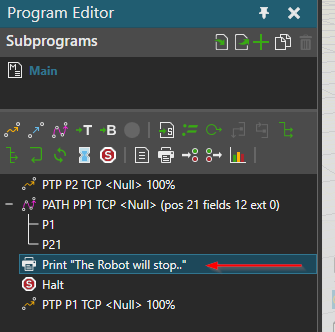
Printする文字を設定すると、Statementにも表示する文字が見えるようになります。
Test it
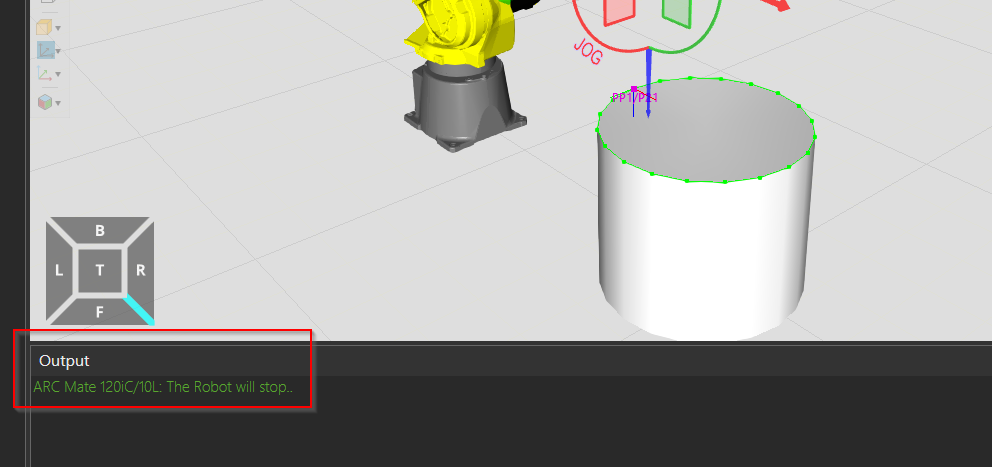
Simulationを実行すると、OutputにMessageが表示されました!
こちらの文字は先程設定した文字になります!