こちらはJTEKTの KSDのServo Drive Tutorialで、第1話はKSD Softのセットアップ・ツールのインストール・試運転までご紹介します。
さ、はじめよう!

Installation
今回使用するJTEKT KSD-A3-0121-L Servo DriveのAuto Tuning・パラメータ設定など試運転に対する必要な操作はKSD Softという無料のツールからできます。
下記のLinkからツールをDownloadしてください。
https://www.electronics.jtekt.co.jp/jp/product/ac-servo/ac-servo-system/

Zipを解凍し、中にあるEXE Fileを実行しましょう。

Next>で進みます。

インストールPathを設定し、Installで進みます。
しばらくまちます…
途中でDriverのインストール確認画面が表示され、InstallボタンをクリックしDriverをインストールしてください。

Done!
Start UP!
KSD Softを起動しましょう。
はじめの起動ではライセンスの同意が必要ですが、Okで進みます。
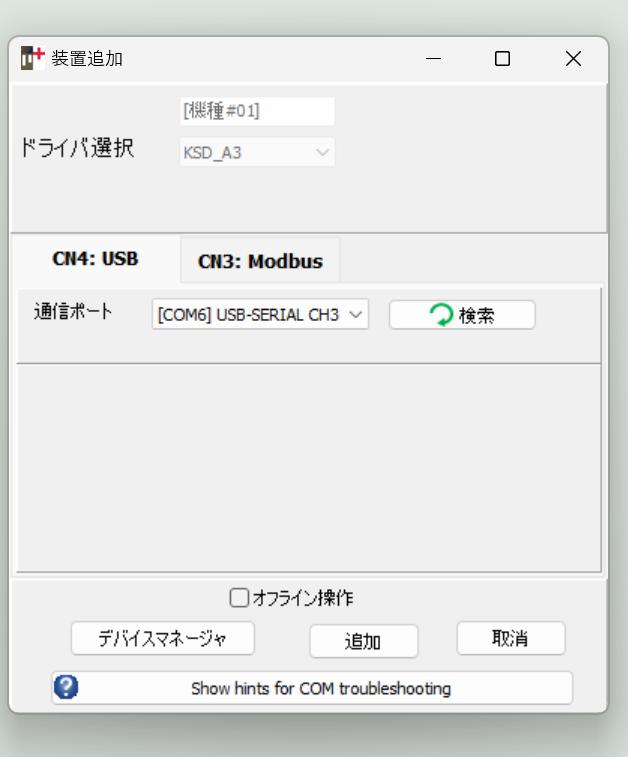
装置追加の画面が表示されます。
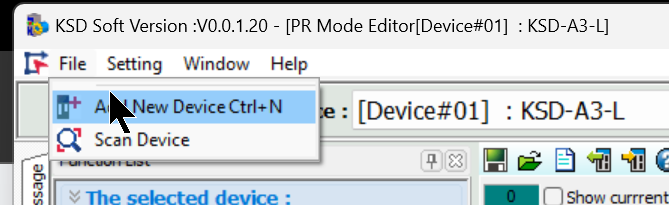
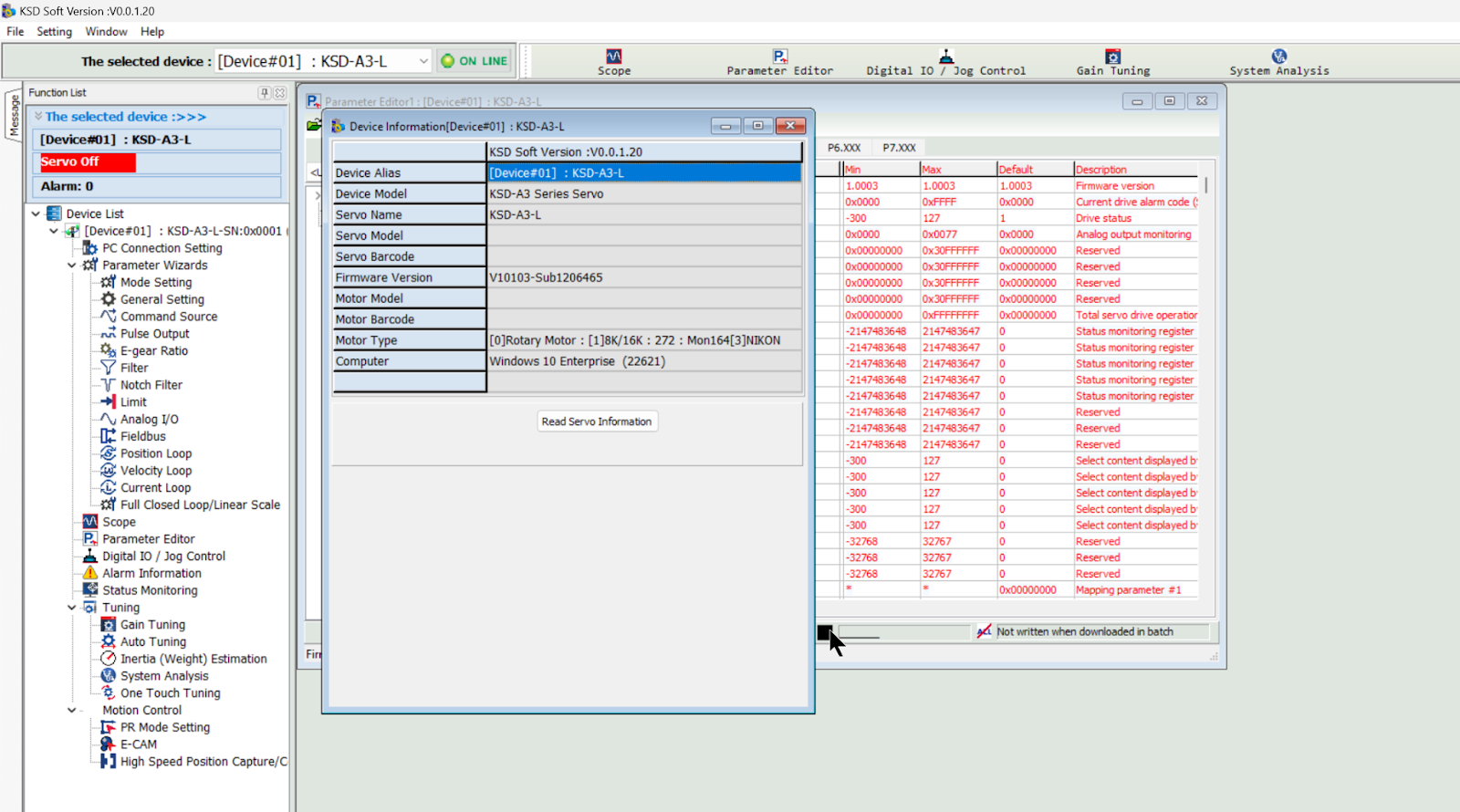
ですが、日本語Interfaceは私にとってどうして慣れないので、設定>言語選択>Englishで英語を切り替えます。

Done!

File>Add New Deviceで新しいDriveを追加します。
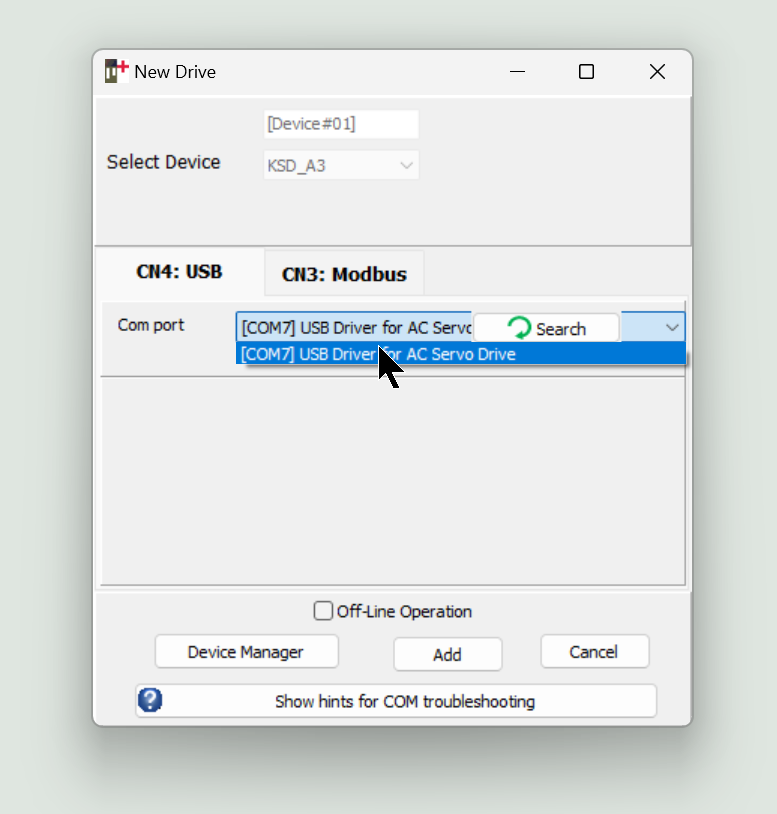
Com portを設定し、AddボタンをクリックしDriveを追加しましょう。

Com portを確認したい場合、Com portのDrop-Listから使用可能のPortの一覧確認できます。
場合によってDevice managerからCom Portを確認しましょう。
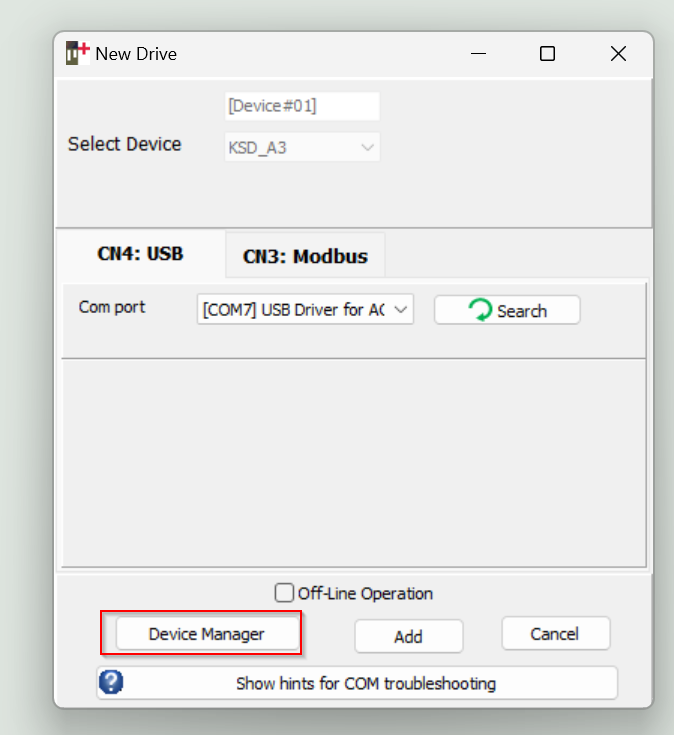
もしCom Portが正確にインストールされた場合、PortsにUSB Driver for AC Servo Drive(COM)があります。

Addボタンをクリックすると、Connecting…のMessageが表示され、しばらく待ってください。
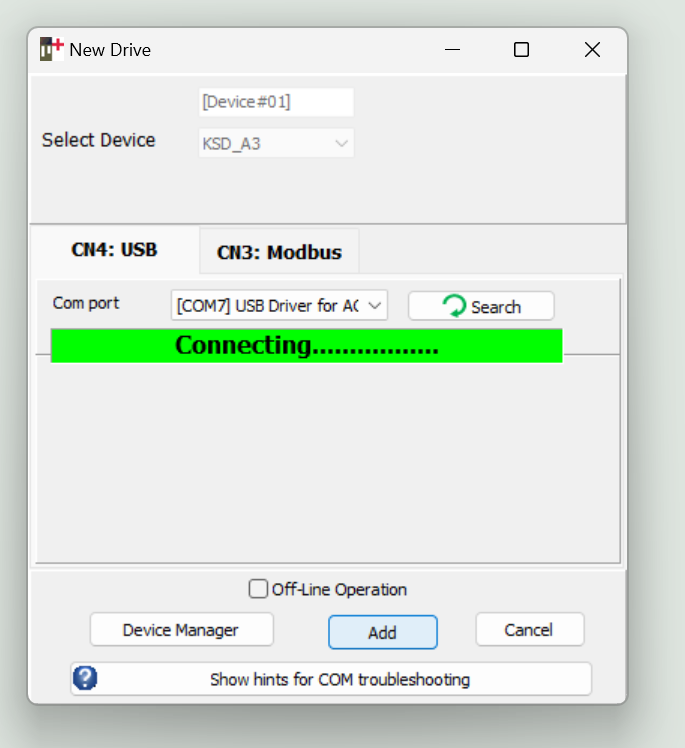
Done!いまKSD SoftがDriveと繋がりました。
Auto Tuning
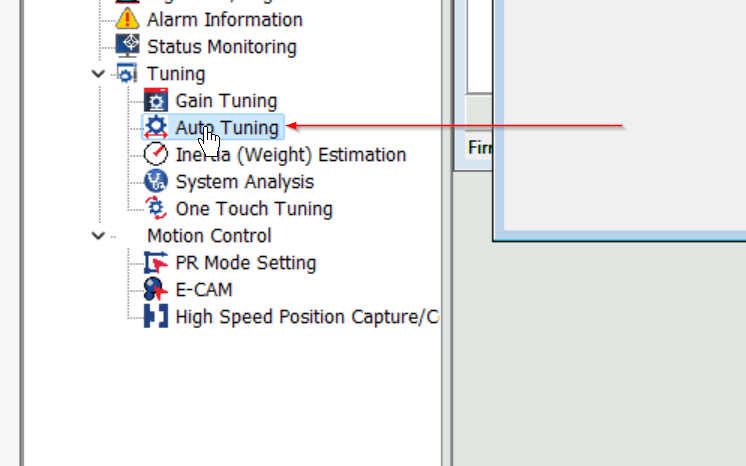
試運転の最初にAuto Tuningを行います。
Tuning>Auto Tuningをクリックしてください。
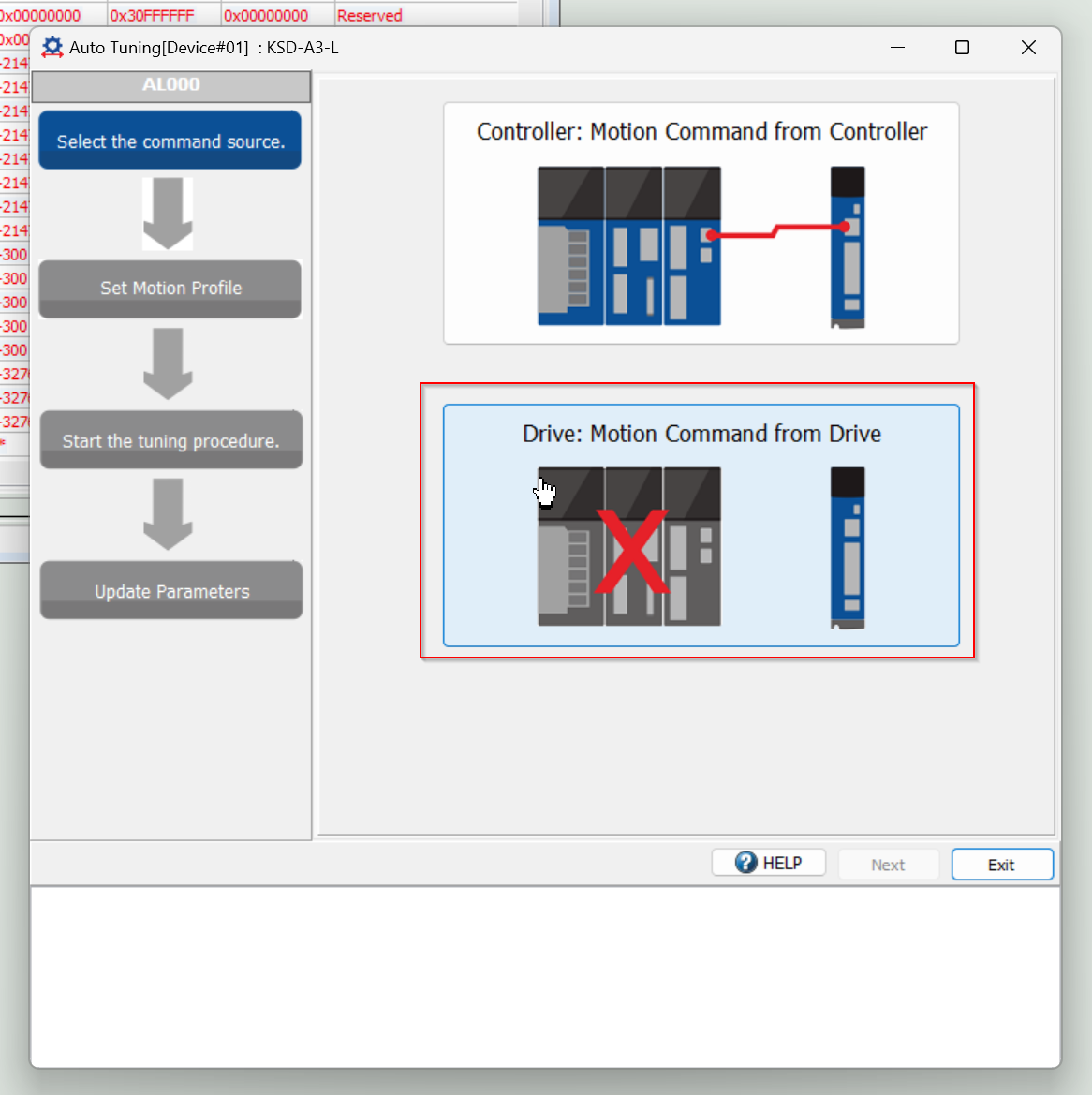
Select the Command source
最初はAuto Tuningコマンドを発行する上位システムを設定します。
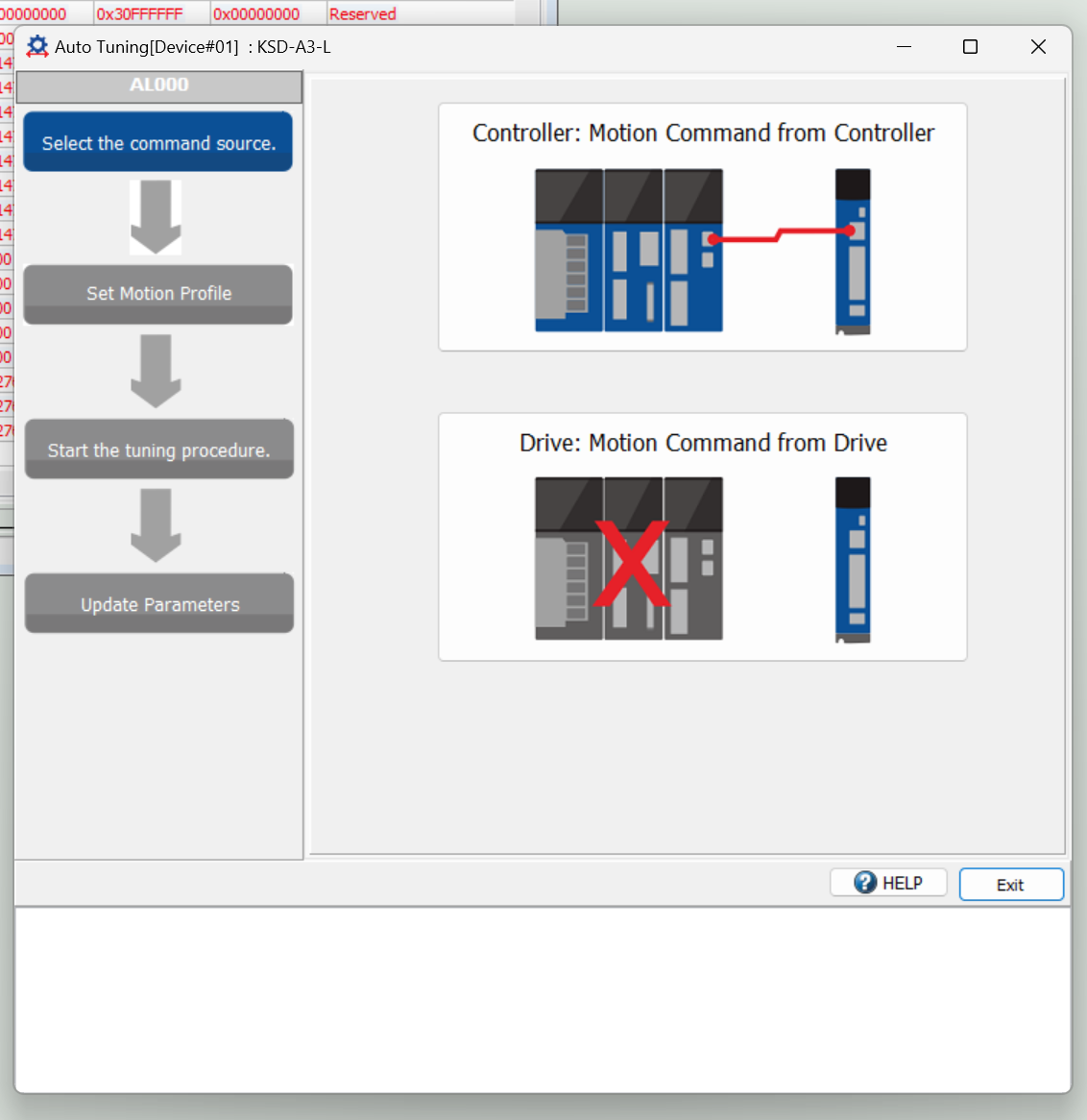
今回はKSD SoftからAuto Tuningを実行するので、Drive:Motion Command From Driveをクリックしてください。
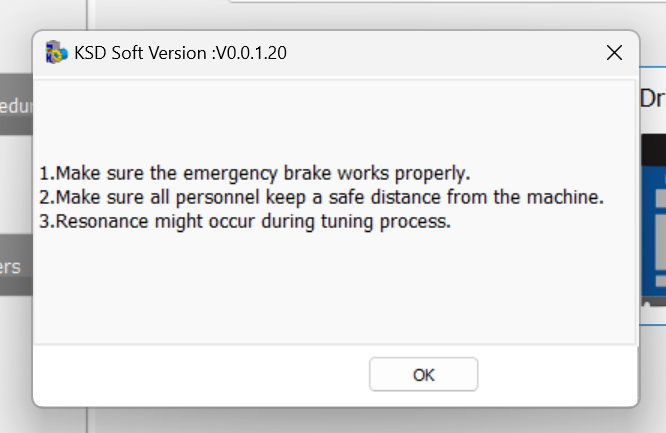
注意画面が表示され、Auto Tuningの間に緊急停止の準備・誰もモーターの近くにいないこと・そしてAuto Tuningが実行される間にはモーターに移動・エラーもあることに注意してください。
Set Motion Profile
次はAuto Tuningに必要なMotion設定を行います。

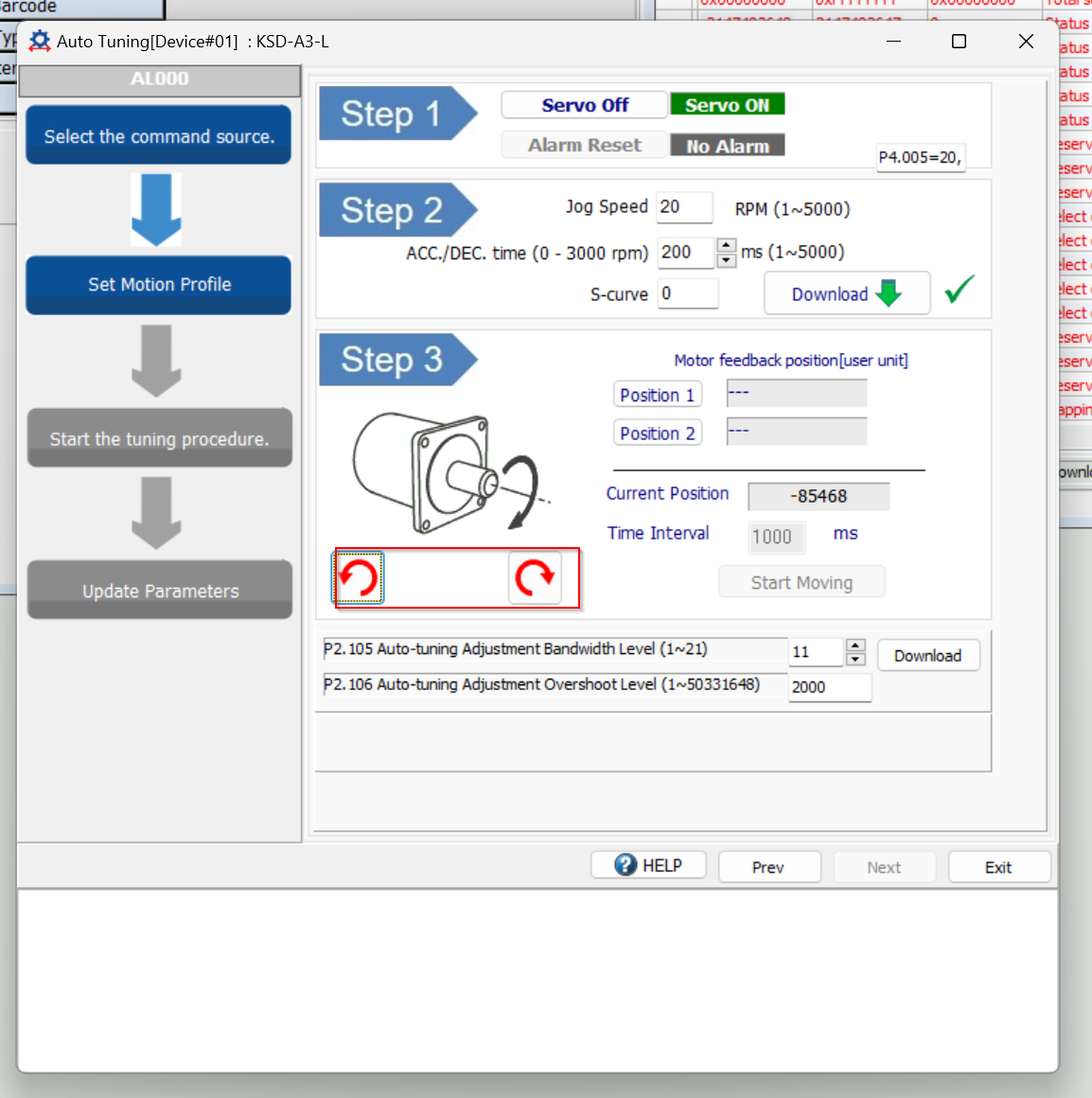
Servo ON
赤枠のServo ONボタンでDriveをOnします。
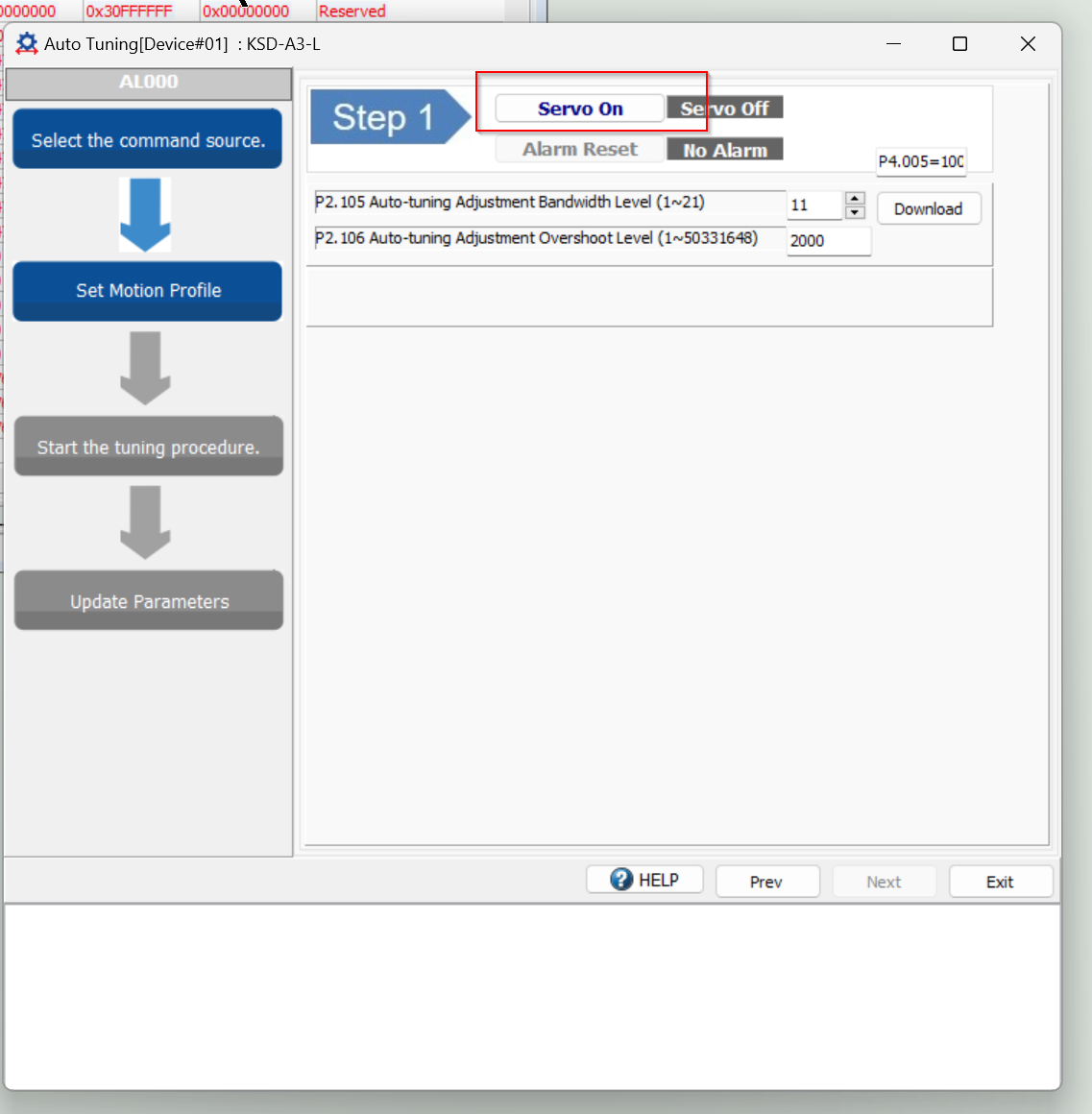
以下の動画から実際の操作を確認できます。
JTEKT.Power ON the servo drive from KSD Soft
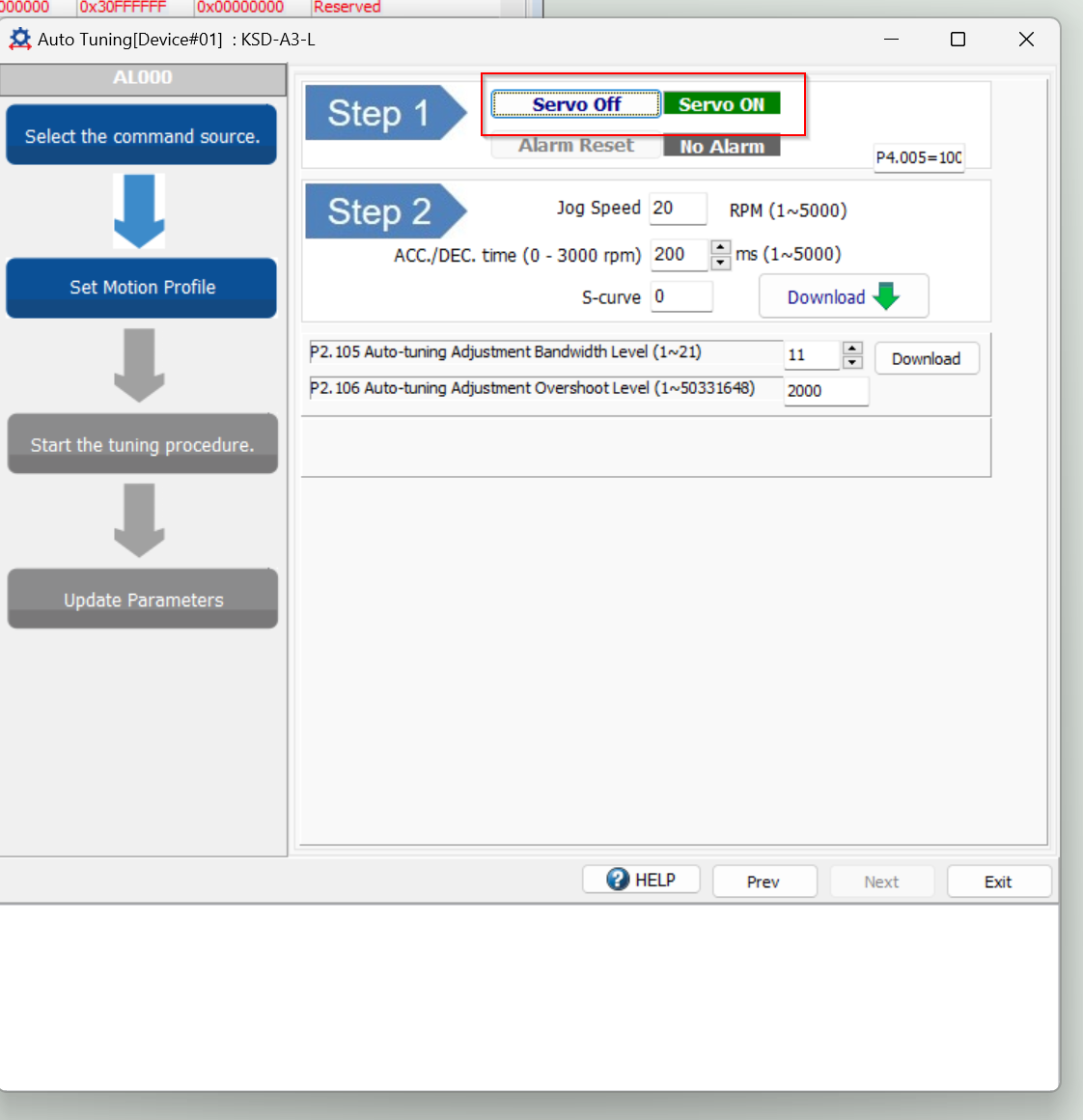
注意画面が表示され、周りの安全を改めて確認してからOKで進みます。

Servo Offが緑になり、つまりDriveがOnになっています。
Configure the Speed Parameters
Jog Speedと加速減速値を適切な値に設定し、”Download”ボタンでパラメータをDriveに書き込みます。
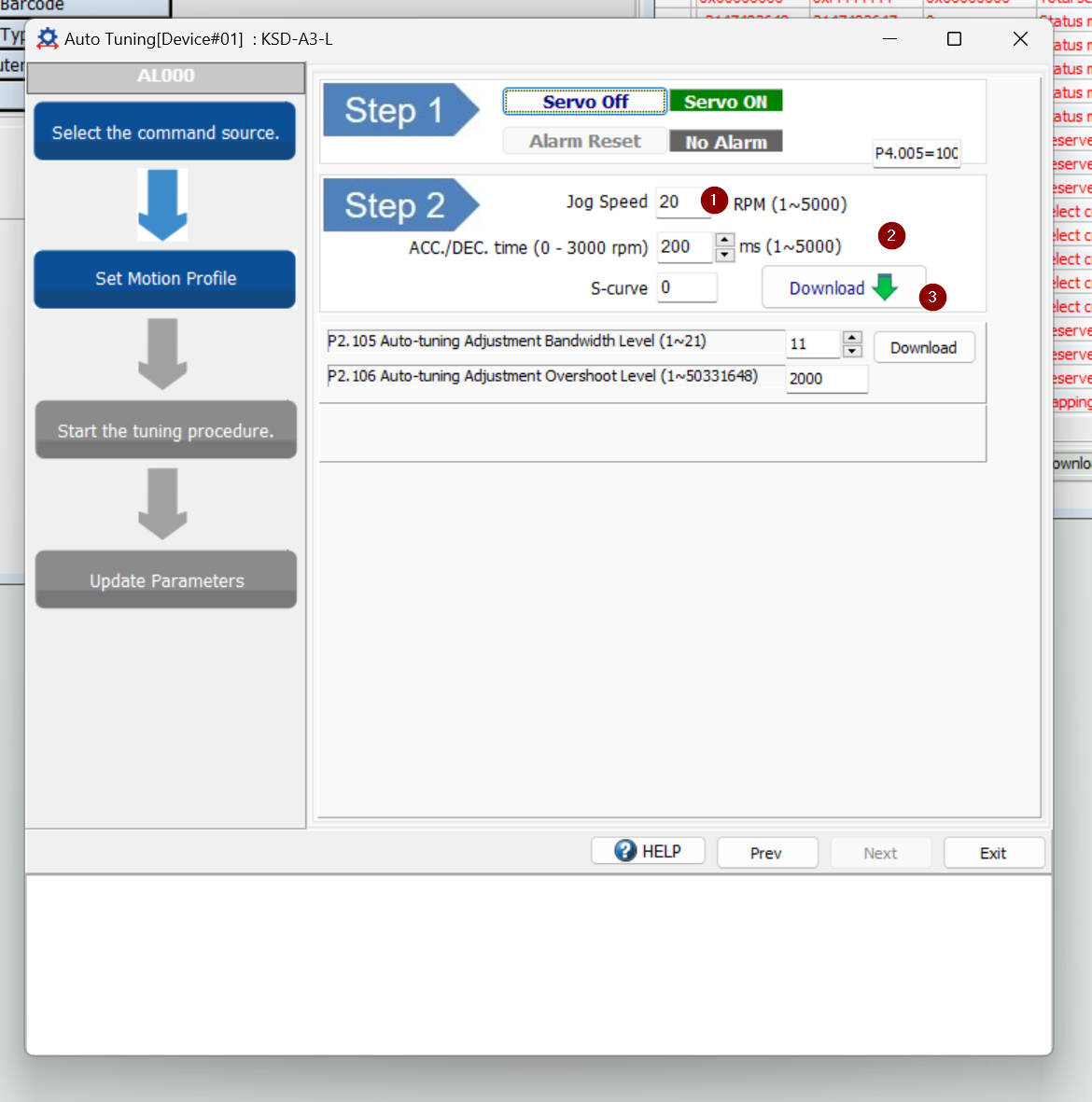
Downloadボタンの隣に緑のCheck Markが表示され、なおかつStep3が表示されたらOKです。
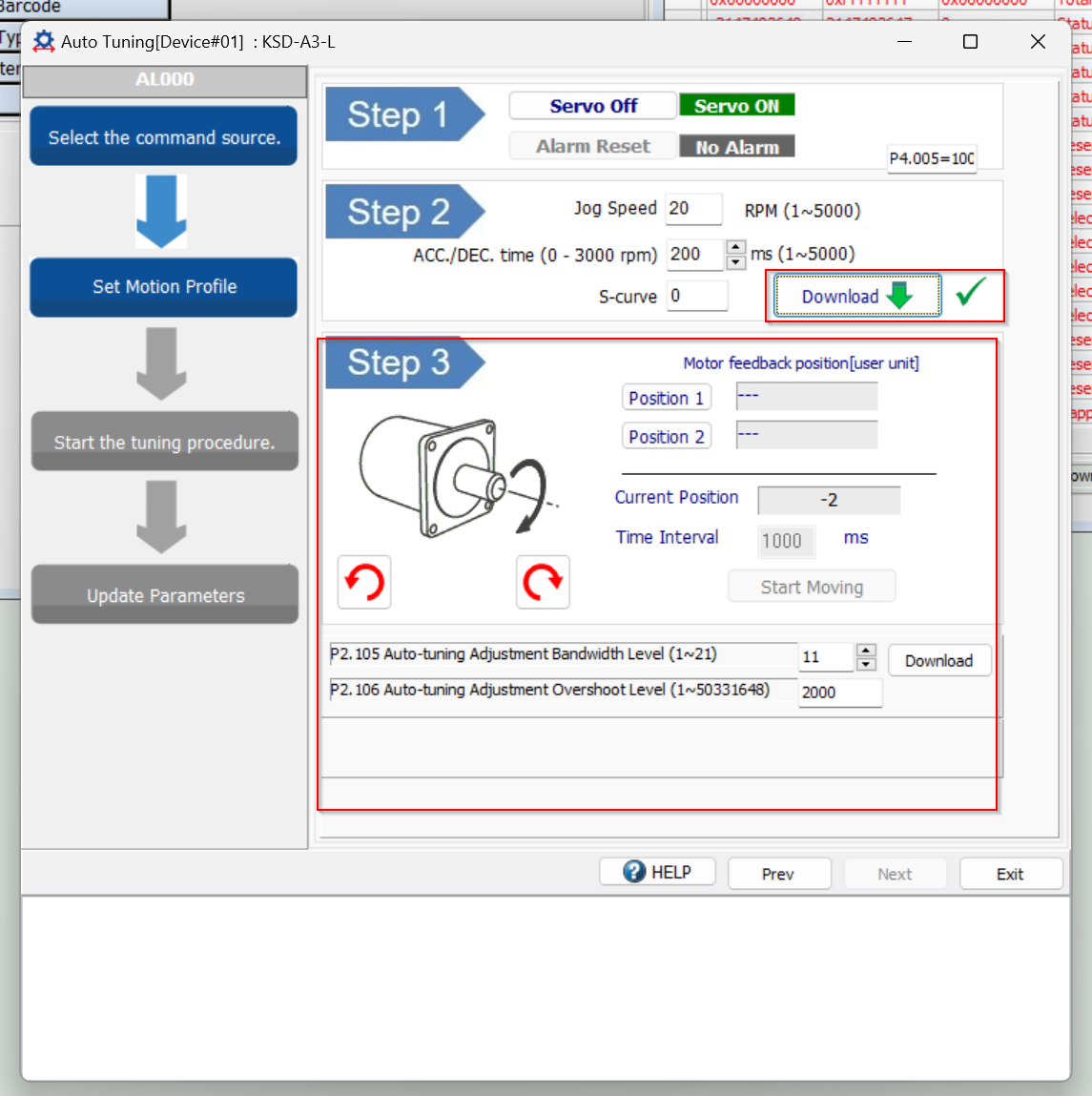
Set up Tuning Position
赤枠のボタンでMotorを回します。
以下の動画から実際の操作を確認できます。
JTEKT.Auto Tuning Jog Operate the servo drive from KSD Soft
移動機構が適切な場所に移動し、Position1をクリックします。

そうすると現在のPositionがPosition1に記録されます。
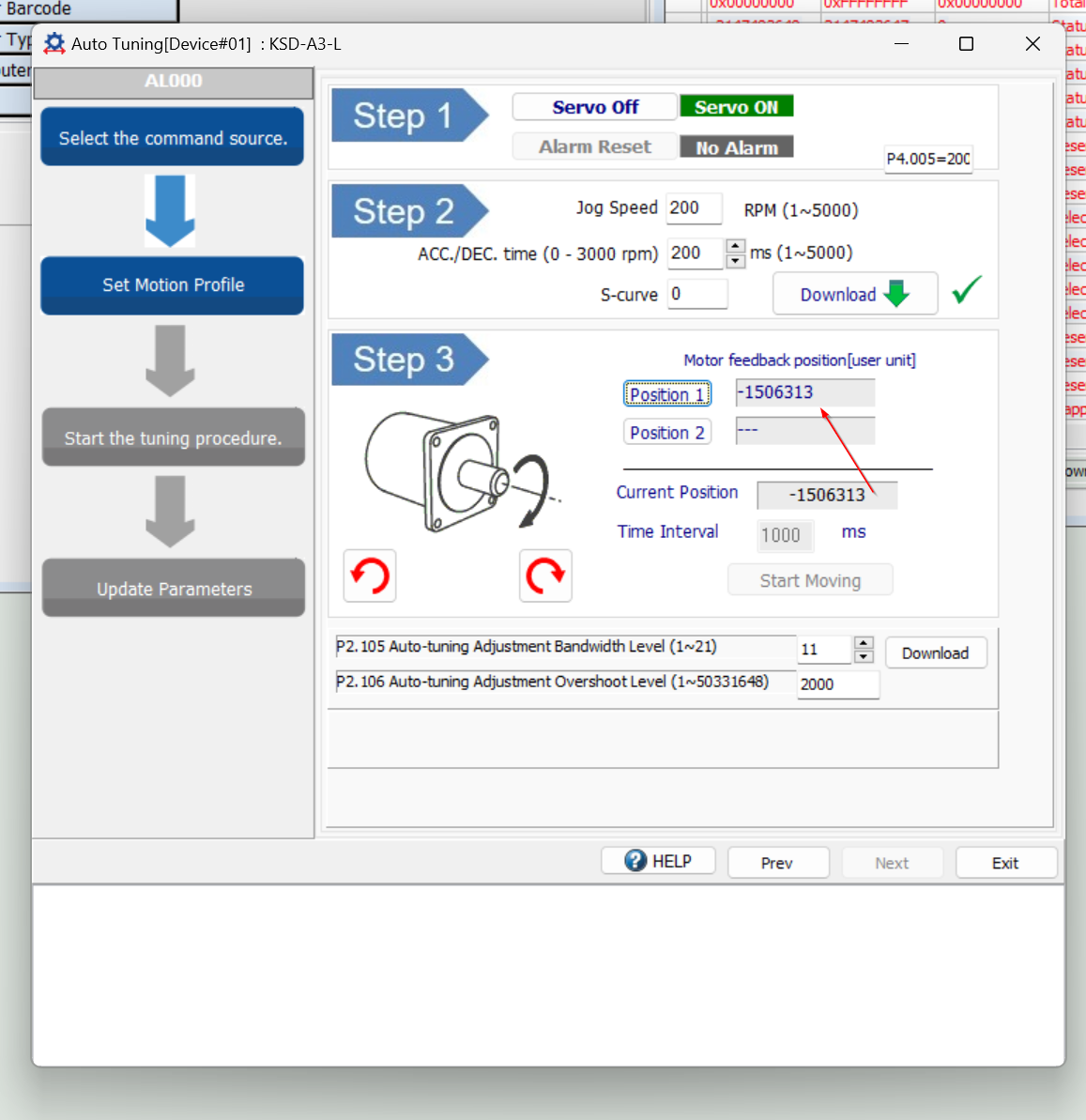
Position2も同じの操作で記録します。
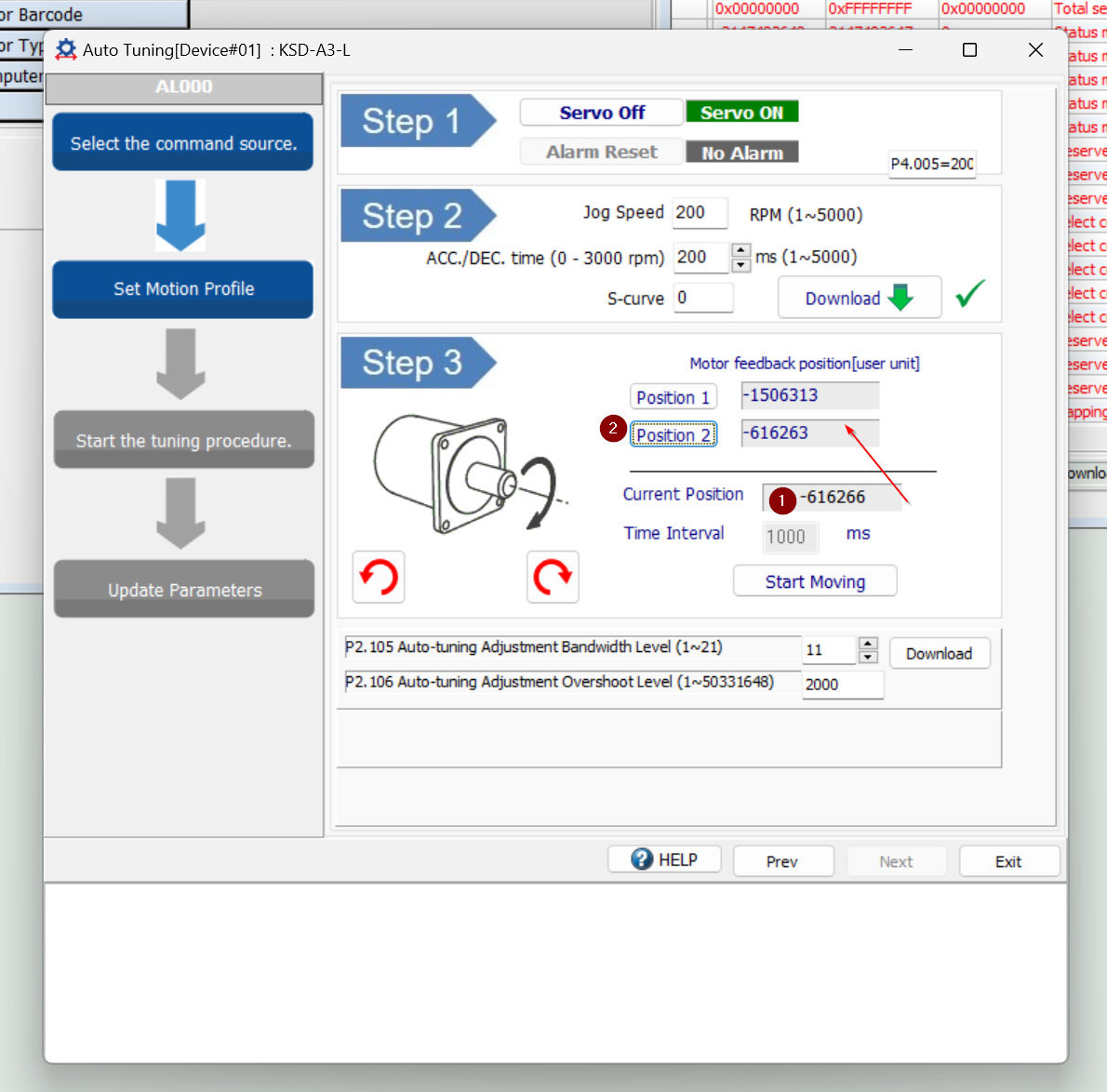
Start Moving
Positonが設定Okしたら、Start MovingボタンをクリックしMotorをPosition1とPosition2で繰り返し移動します。
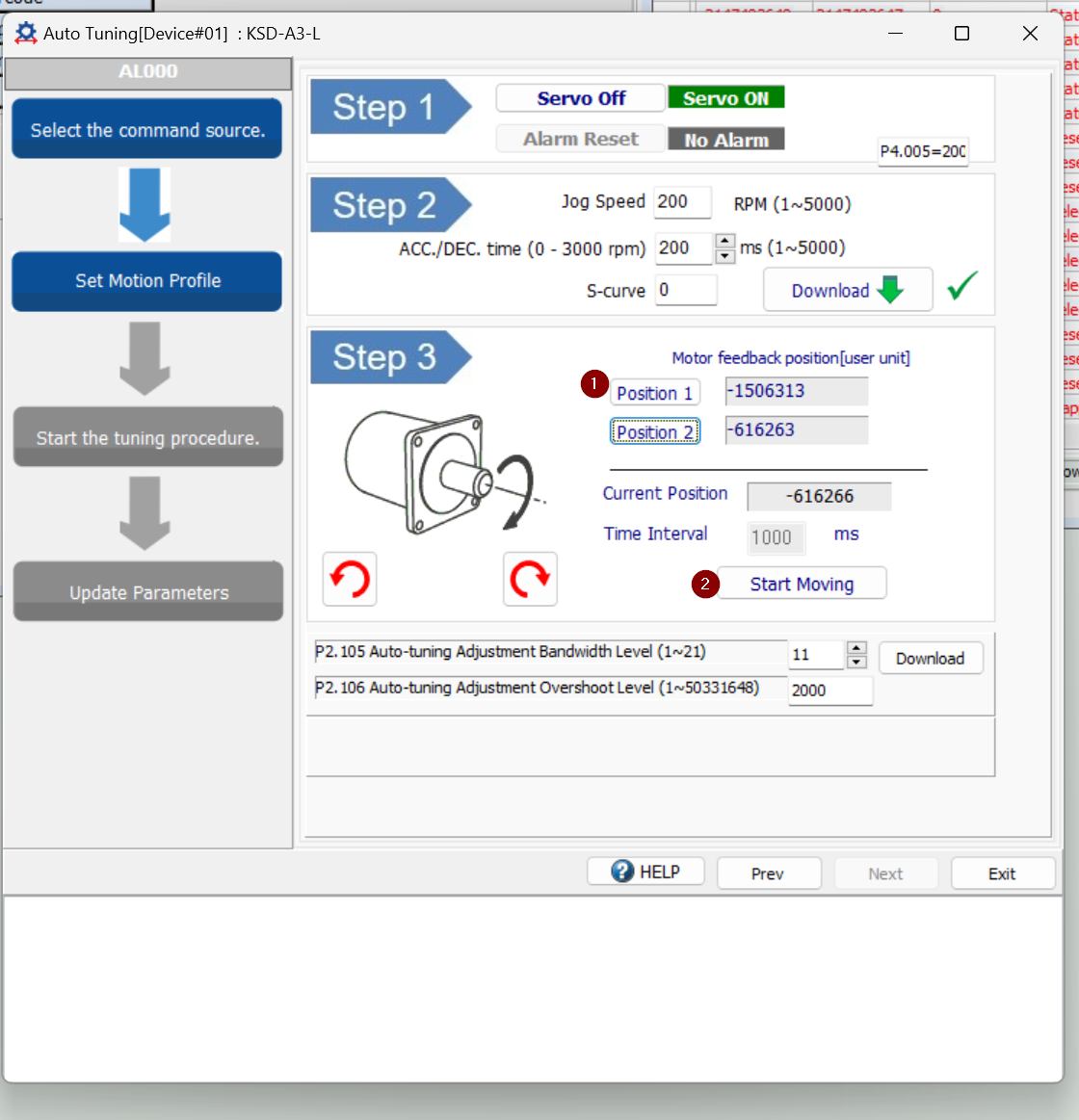
”Press Next to start auto tuning”のメッセージが表示され、Nextで進みます。

以下の動画から実際の操作を確認できます。
JTEKT.Auto Tuning Moving Operate the servo drive from KSD Soft
Okで進みます。

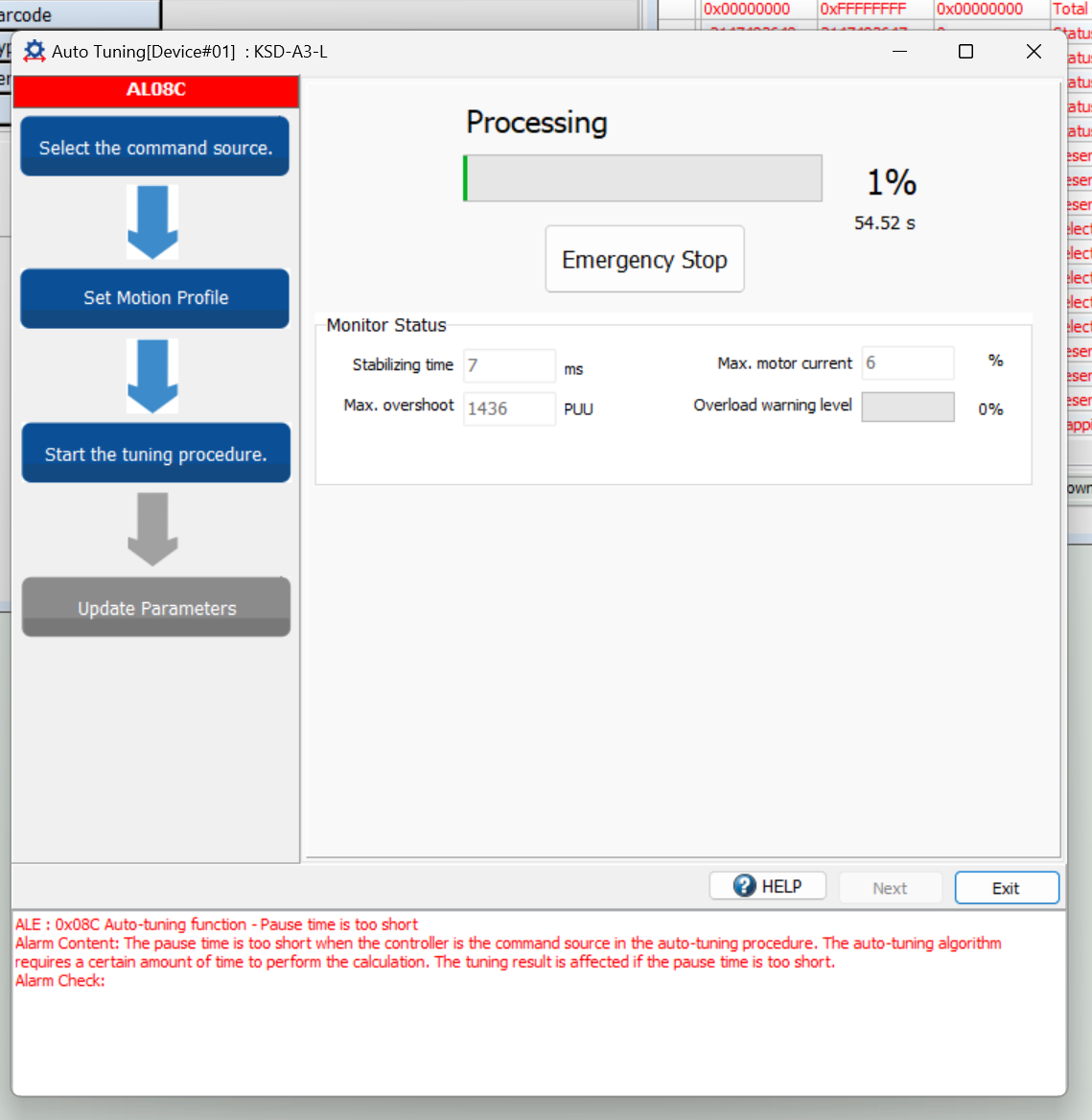
Tuning
Auto Tuningが始まり、危険がある場合はEmergency Stopのボタンをクリックしてください。
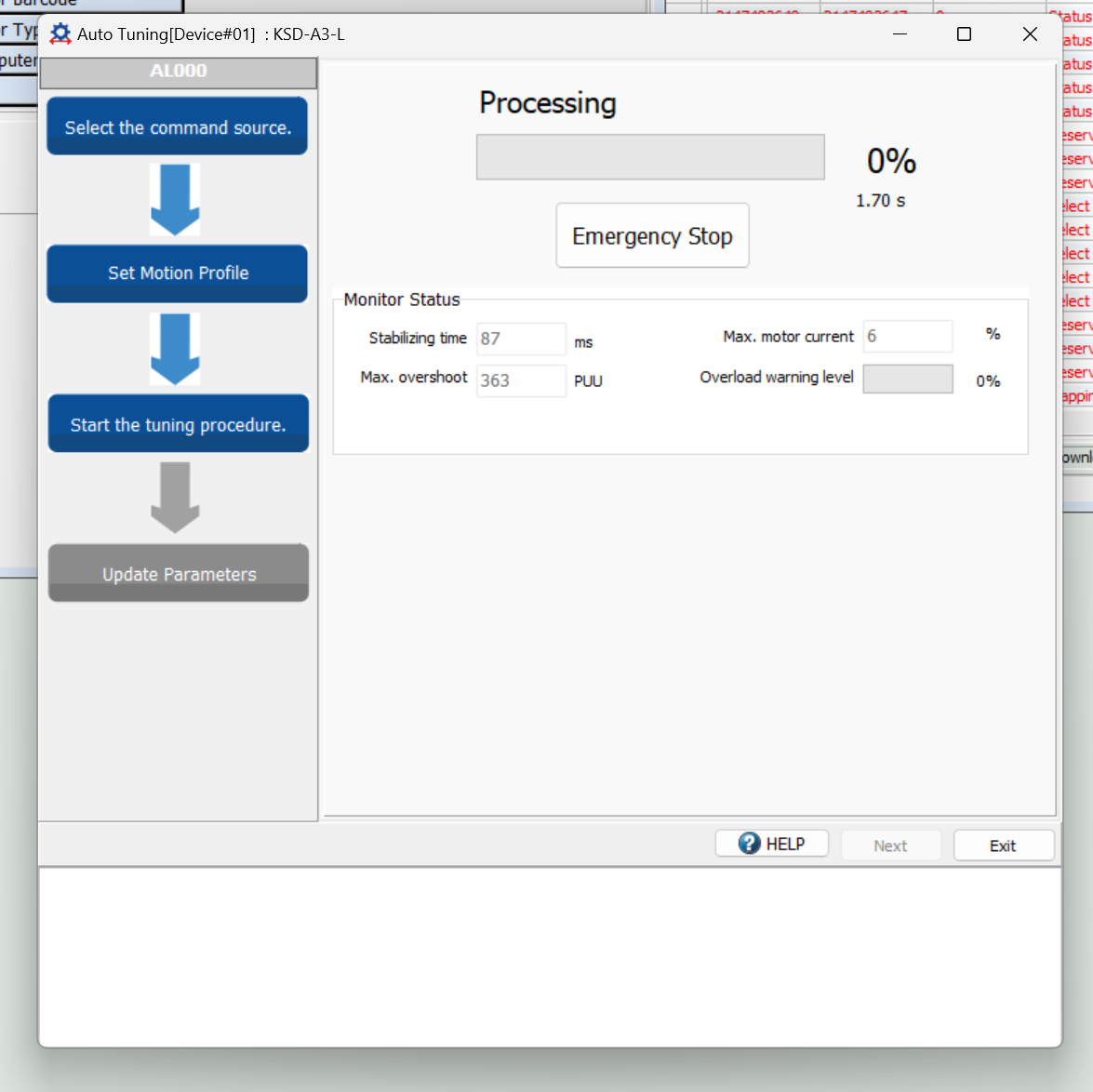
しばらくまちます…(大体5分かかります)
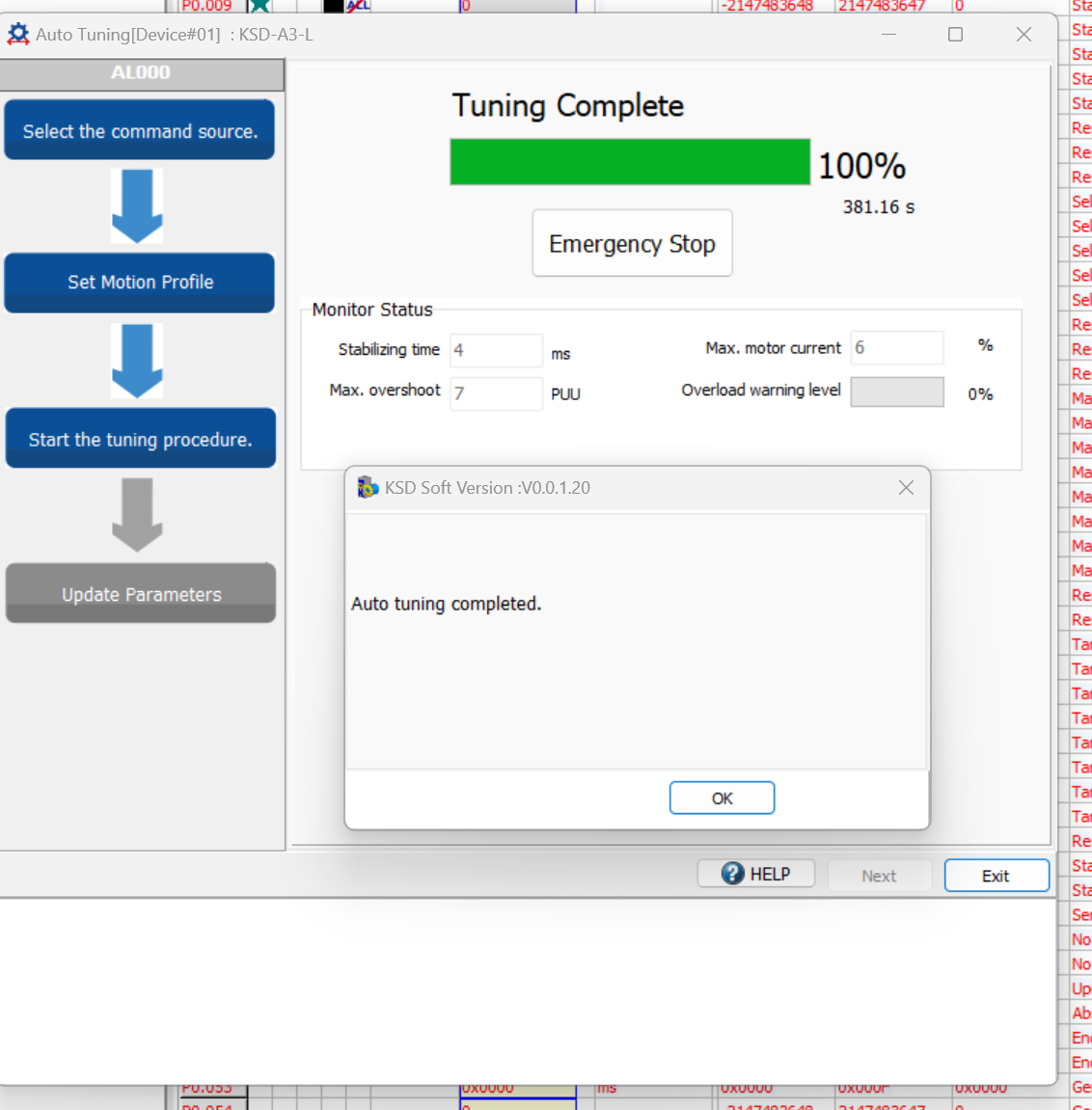
Auto Tuning Completedのメッセージが表示されたらAuto Tuning成功です!
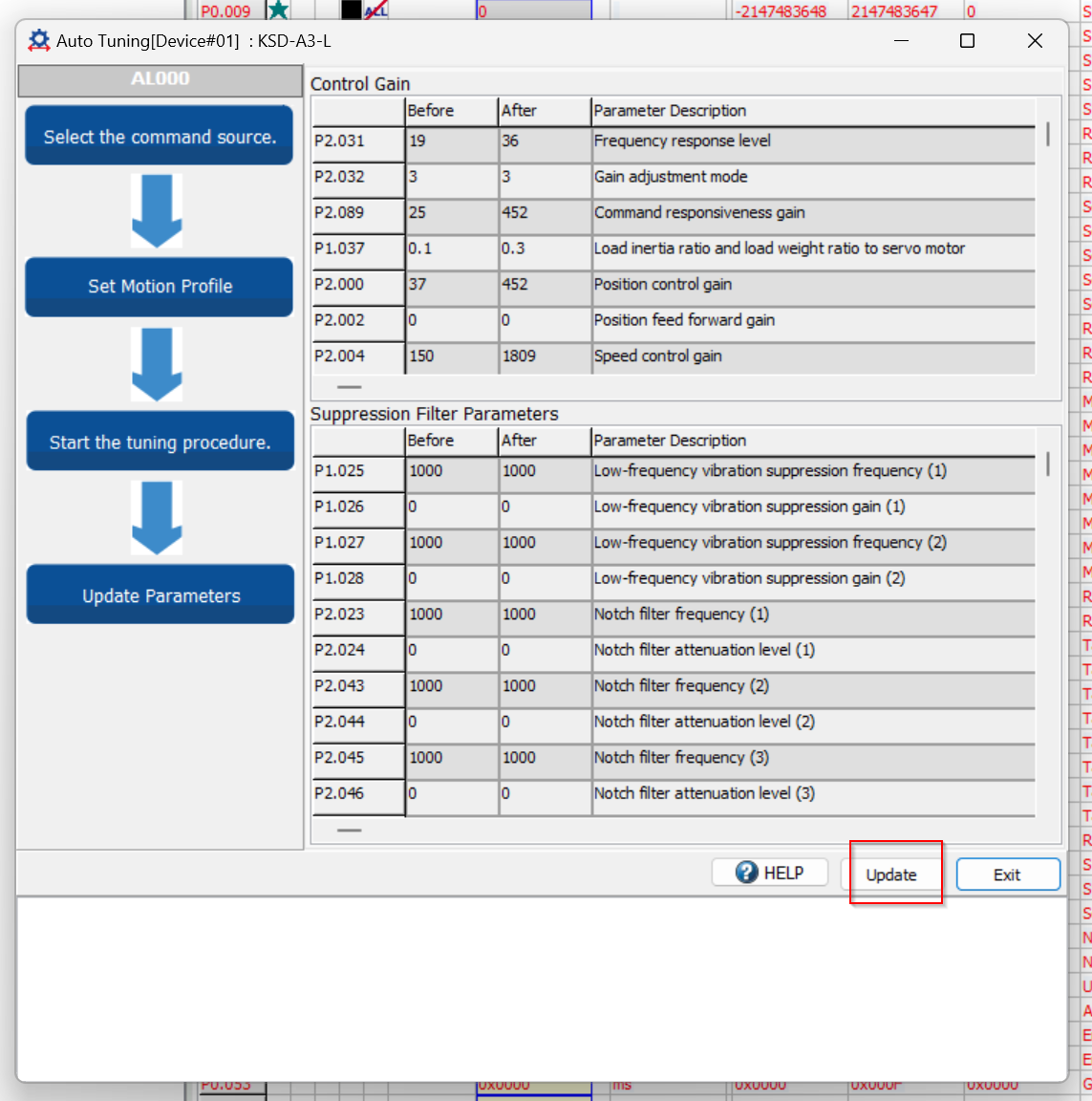
Update
最後はUpdateボタンでパラメータを更新しましょう。
Control Panel
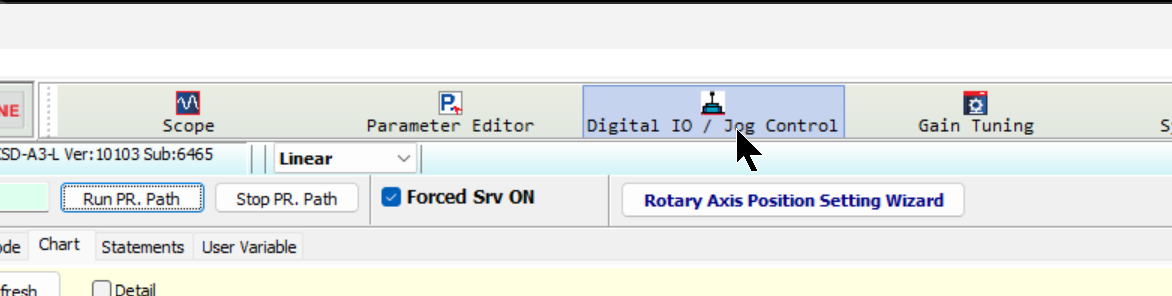
Auto Tuningが完了したら、今回の記事最後ではControl PanelでDriveの操作を紹介します。KSD SoftのDigital IO/Jog Controlをクリックします。
Driveのパネル操作画面が表示されました。
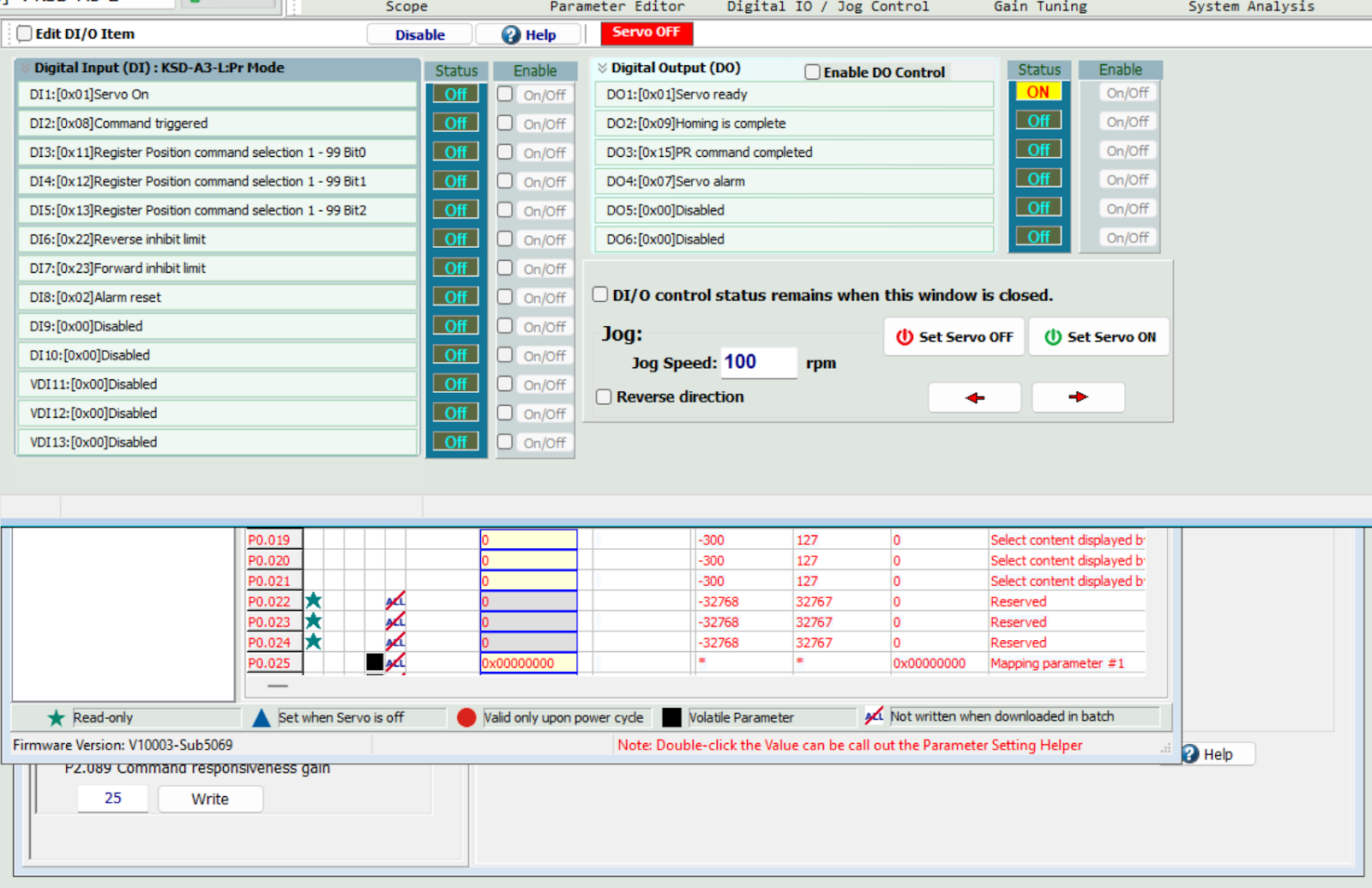
IO Control
赤枠のON/OFF ボタンで該当するデジタル入力・出力を操作できます。
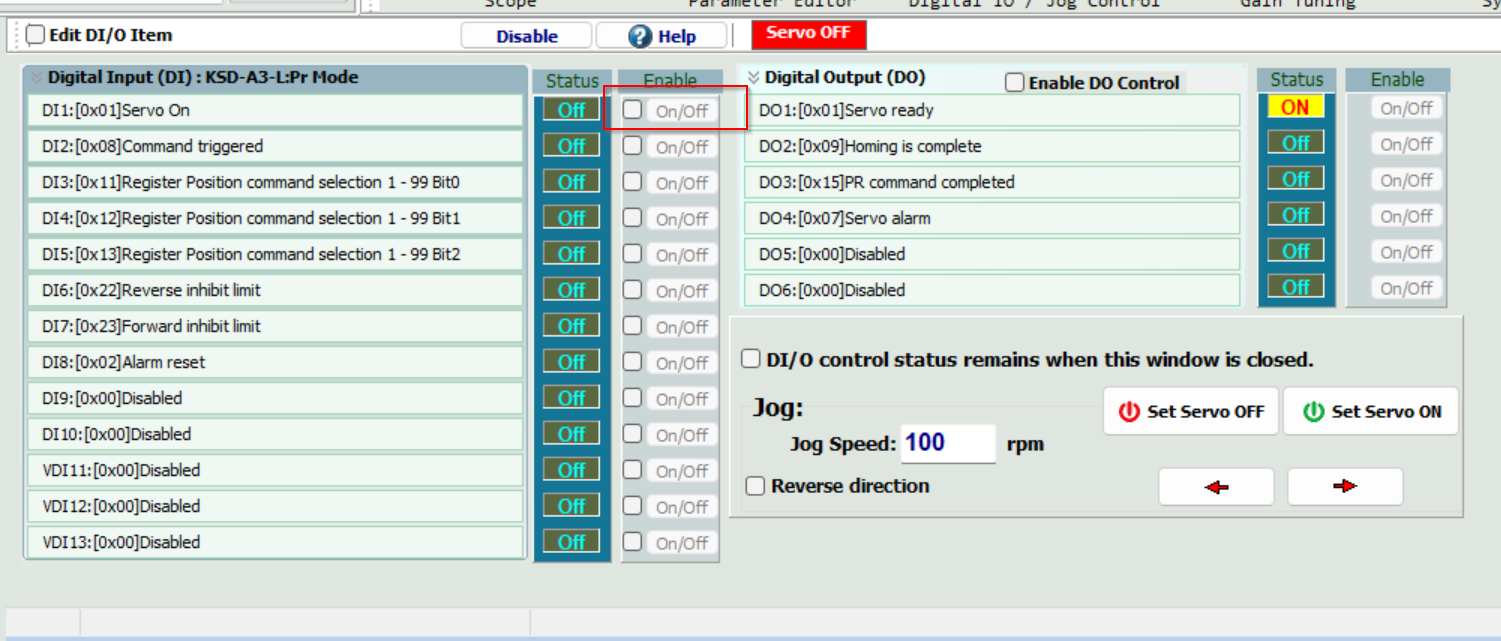
例えばデジタル入力DI1をONする場合、ON/OFFのCheckboxを入れると該当する墓ボタンがクリックできるようになります。
ON/OFFボタンをクリックすればデジタル入力をToggleできます!
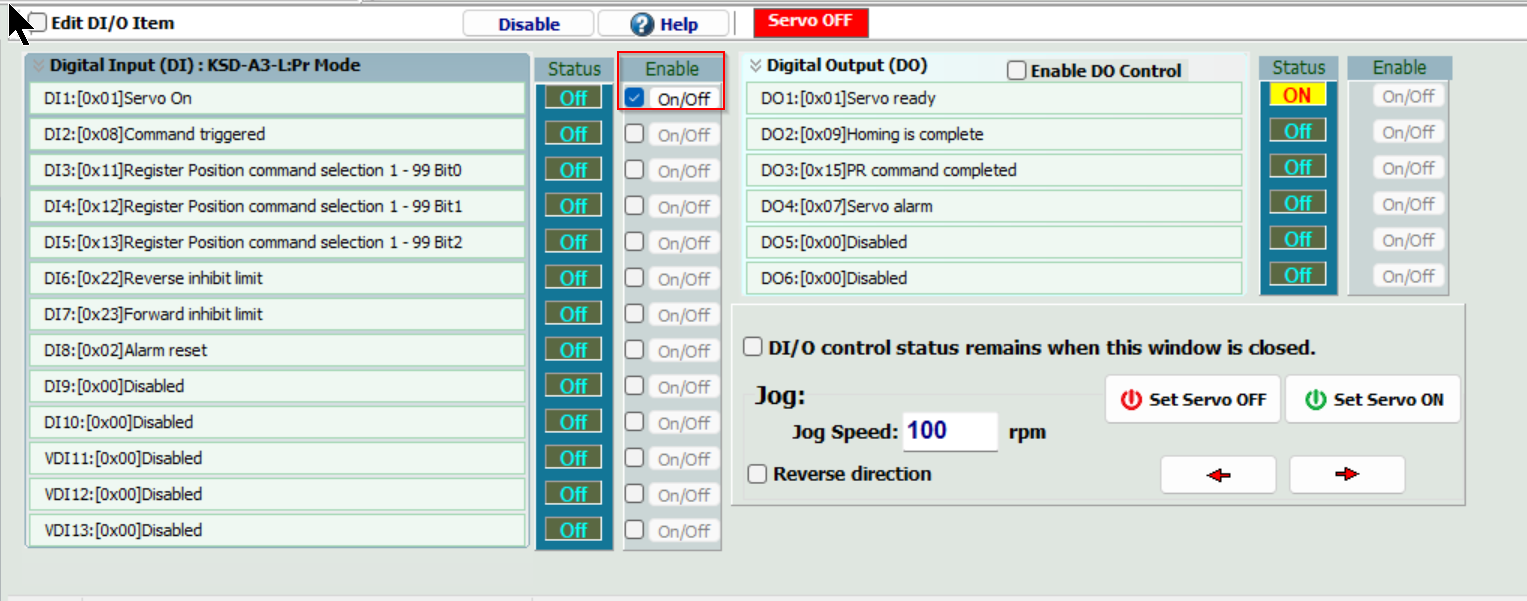
Jog Operation
もしくはControl PanelのStart Servo ONのボタンから直接Servo On/OFF操作できます。
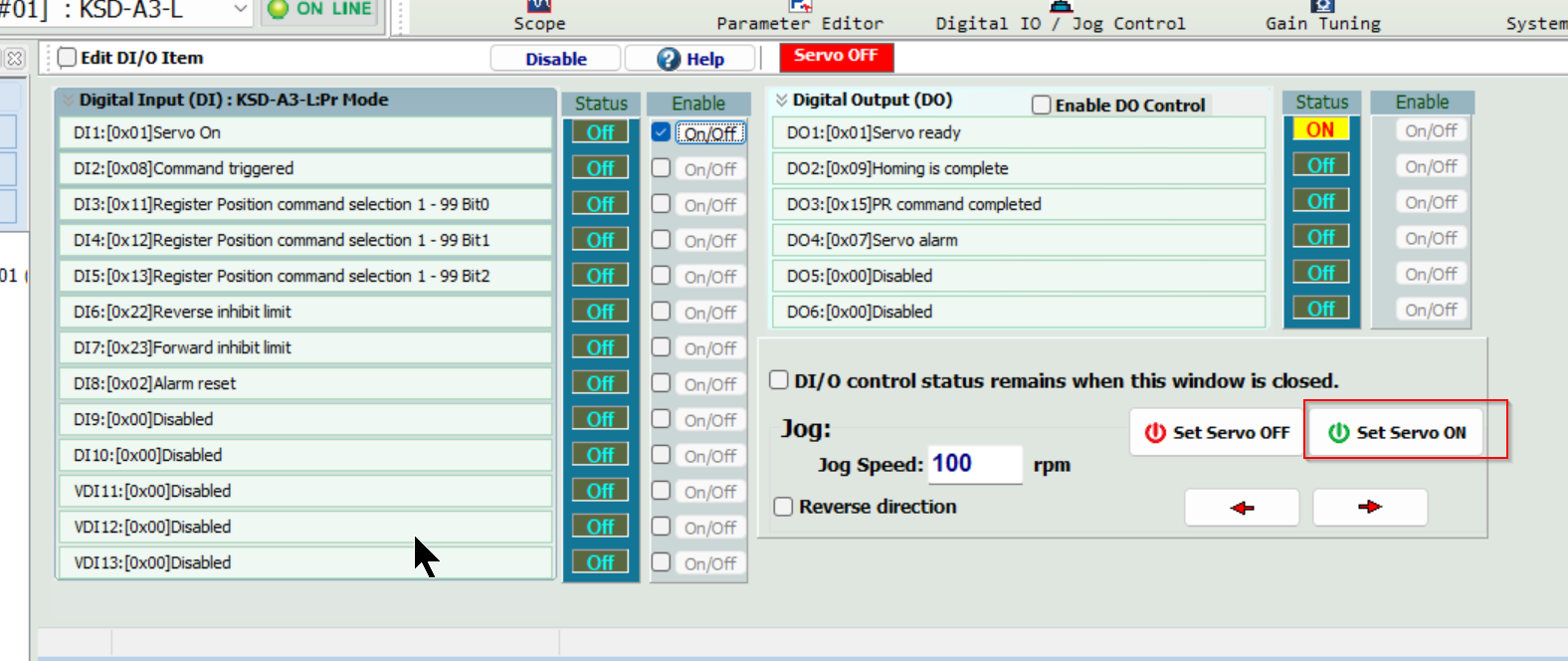
Done!ServoがOnになりました。

Jog SpeedにJog OperationのSpeedを設定し、矢印ボタンをクリックすればモータが動きます!

以下の動画から実際の操作を確認できます。