こちらはDELTA Motion ControlのRM200 Lite – CPU20LのTutorialシリーズ第2話です。今回はEthernetからのCPU接続・CPU各モード説明・Discrete Inputs・Outputsについて紹介します。
さ、はじめよう!

Connect with Ethernet
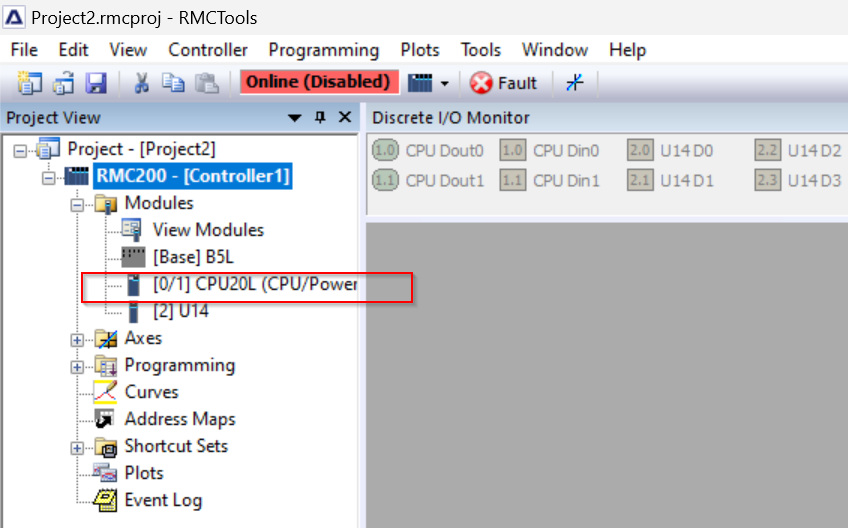
前回はUSB経由でRMC200と接続しましたが、今回はEthernetからRM200にアクセスしてみます。RMC200>Modules>[0/1]CPU20Lをクリックします。
Ethernet Tabを開いてください。
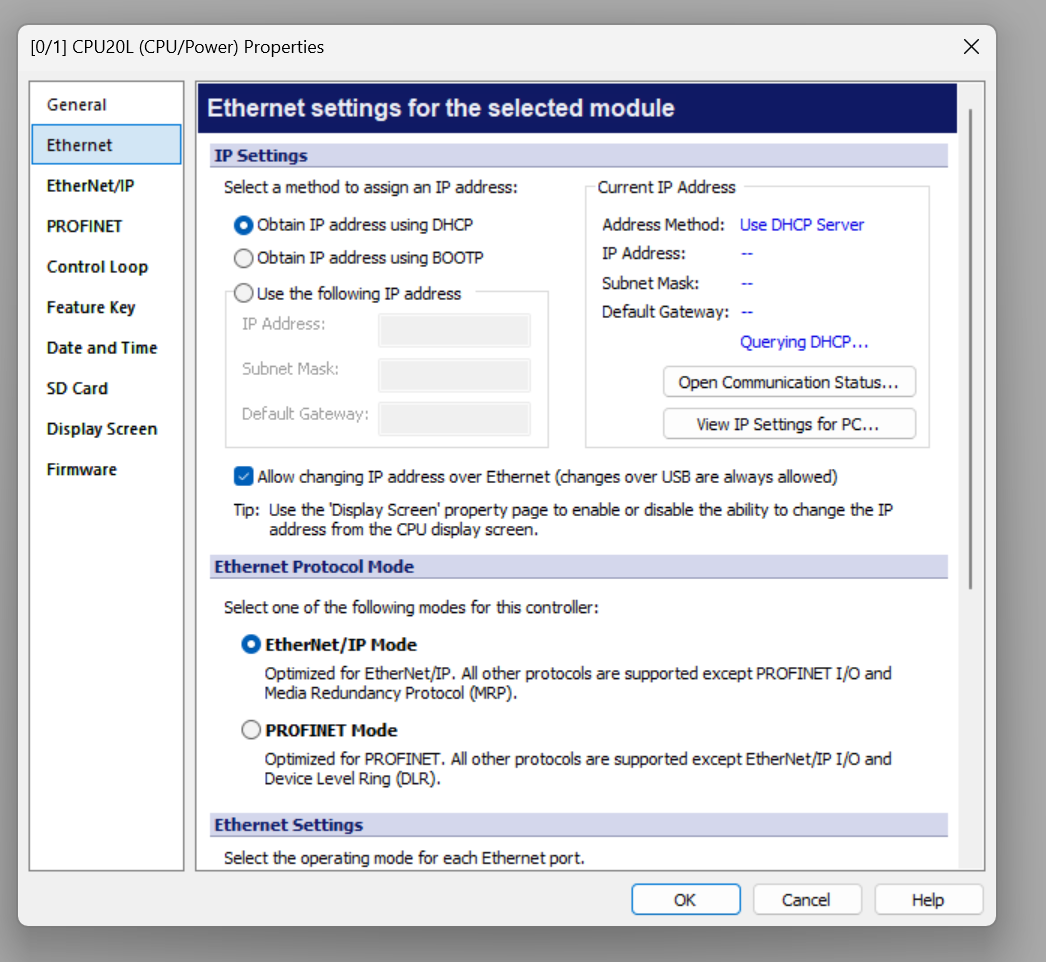
DefaultではDHCPサーバーからIPを設定しますが、”Use the following IP Address”を選び、固定IPアドレスを設定してあげてください。
Yesで設定を確定しましょう。

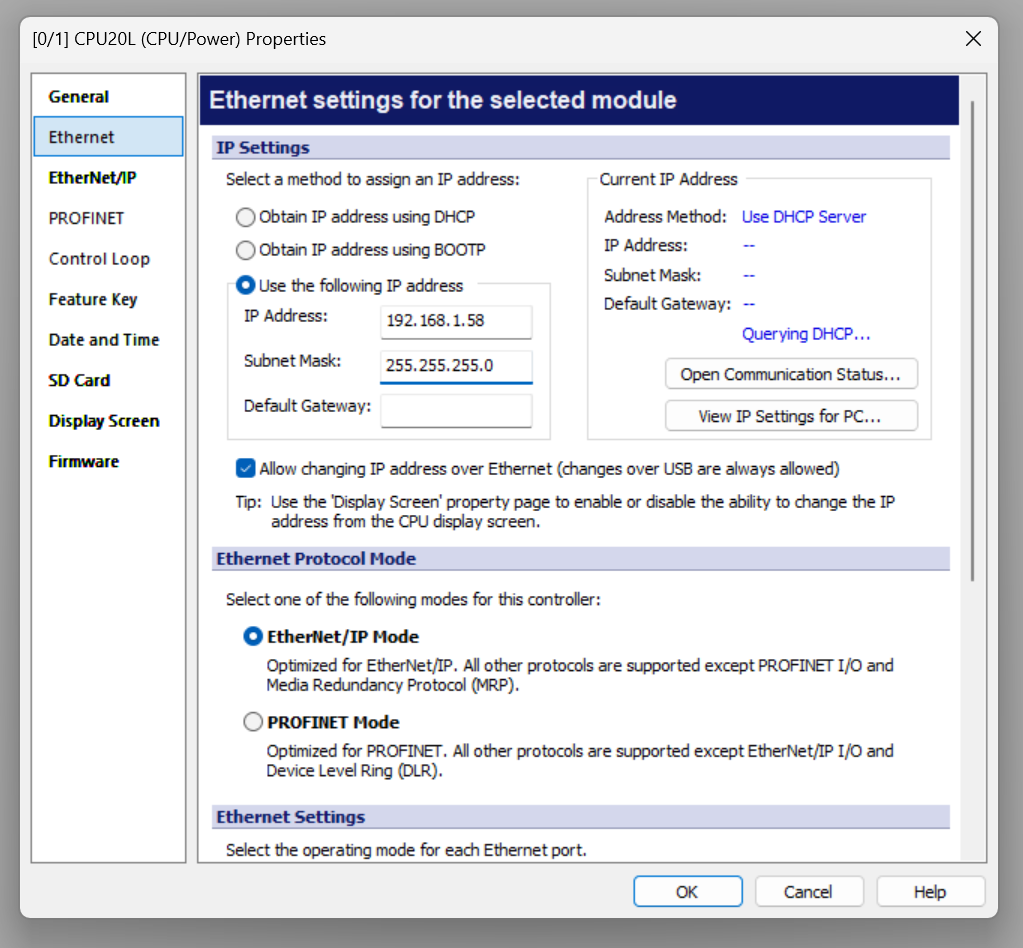
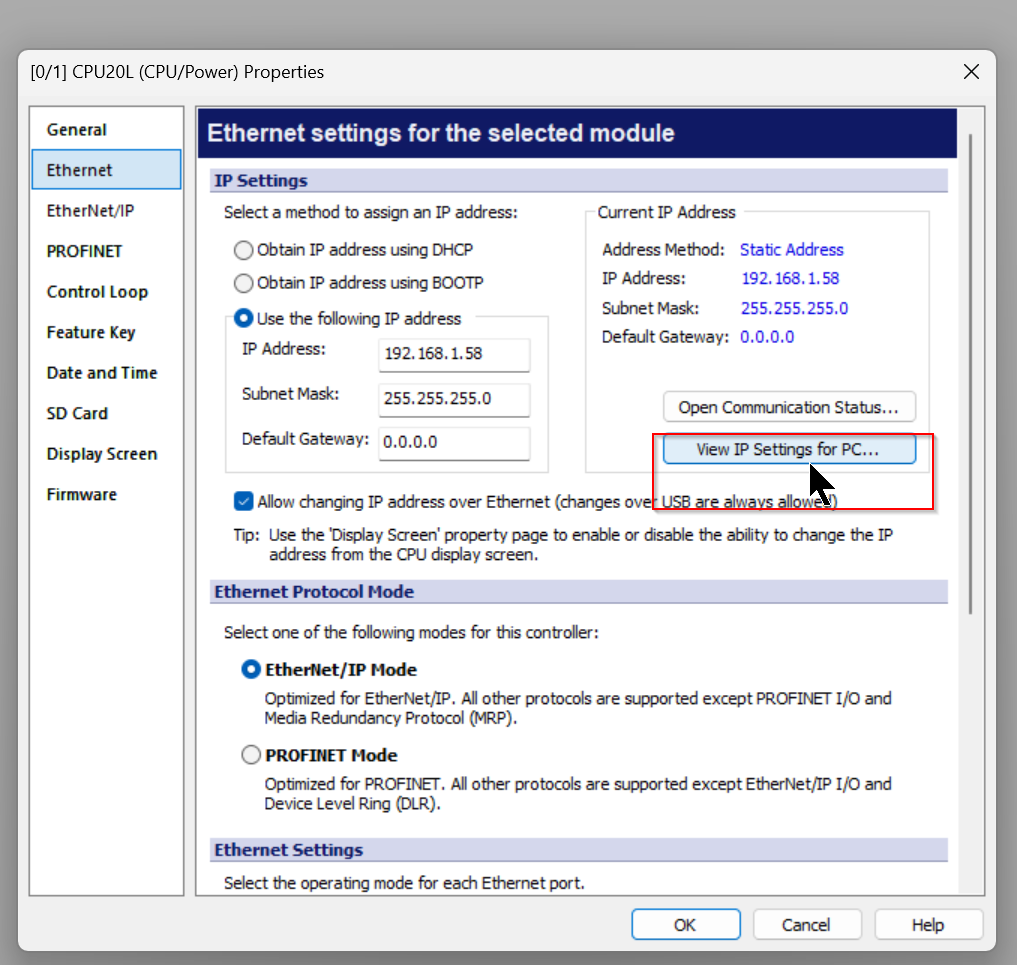
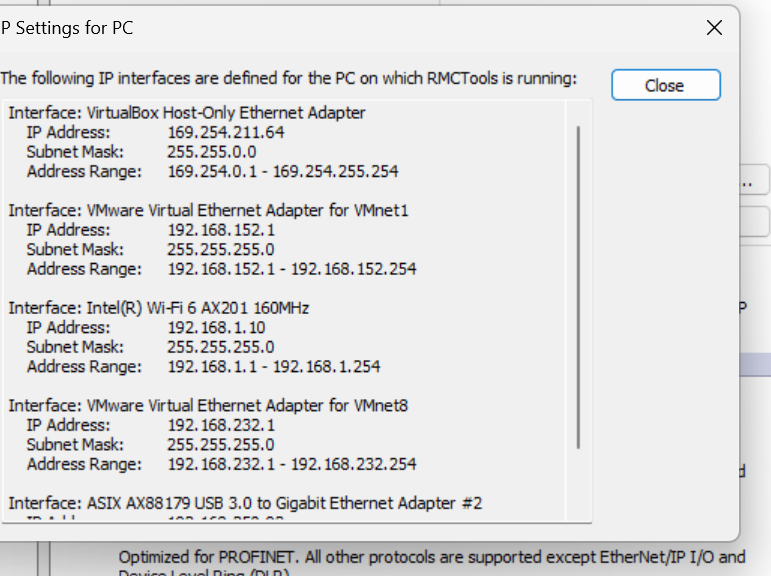
View IP Setting
Current IP AddressのFieldには現在RMC200のIPアドレスが表示され、View IP settign from PCをクリックするとパソコンのIP設定も確認できます。
Done!
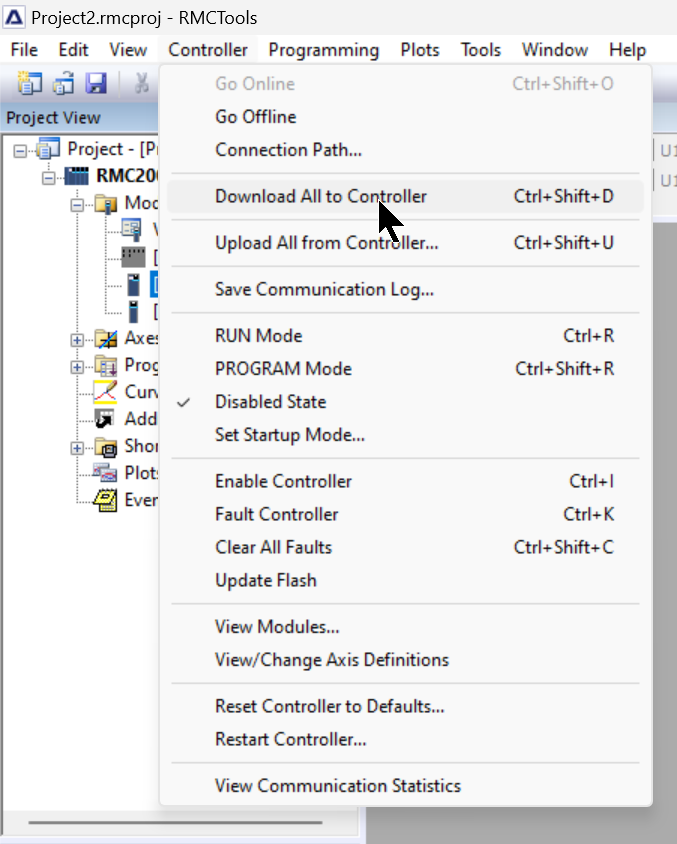
Download Configuration
IP設定など完了したらController>Download All to ControllerでプロジェクトをRMC200にDownloadしてください。
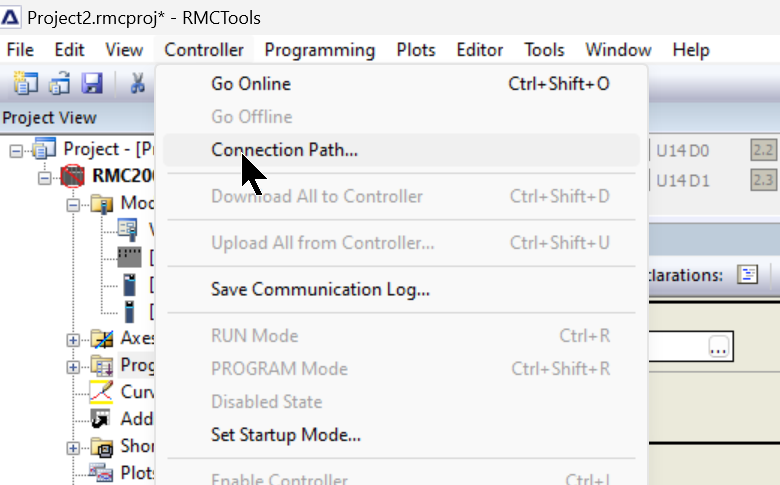
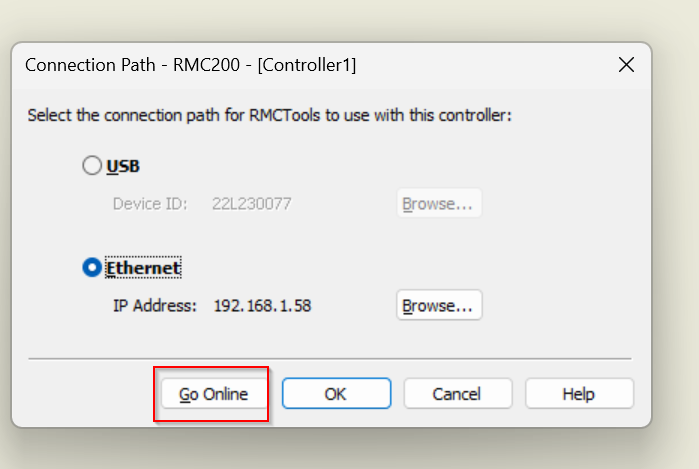
Connection Path
次はEtherent経由でRMC200にアクセスするため、Controller>Connection Pathをクリックします。
USBかEtherentかのConnection Pathを設定できます。
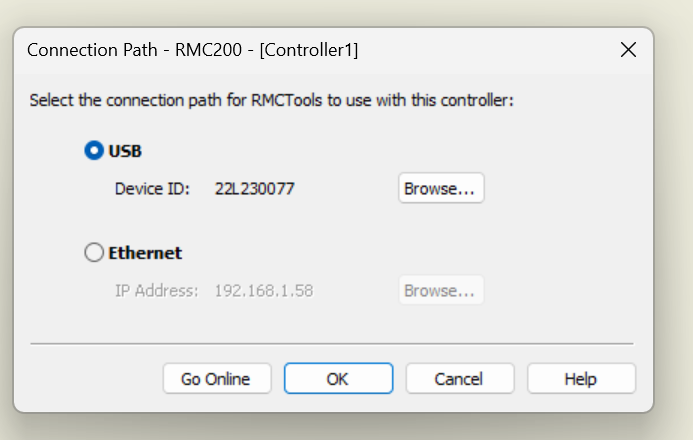
Ethernetを選び>Go Onlineをクリックしましょう。
Done!
View From LED Display
RMC200についてるLED DisplayにもIPアドレスの確認ができます。
Main Menu>ENTERボタンを押してください。

Ethernet画面に変わり、もう一回ENTERをクリックします。

Done!現在RMC200のIPアドレスなどの設定が見られます。

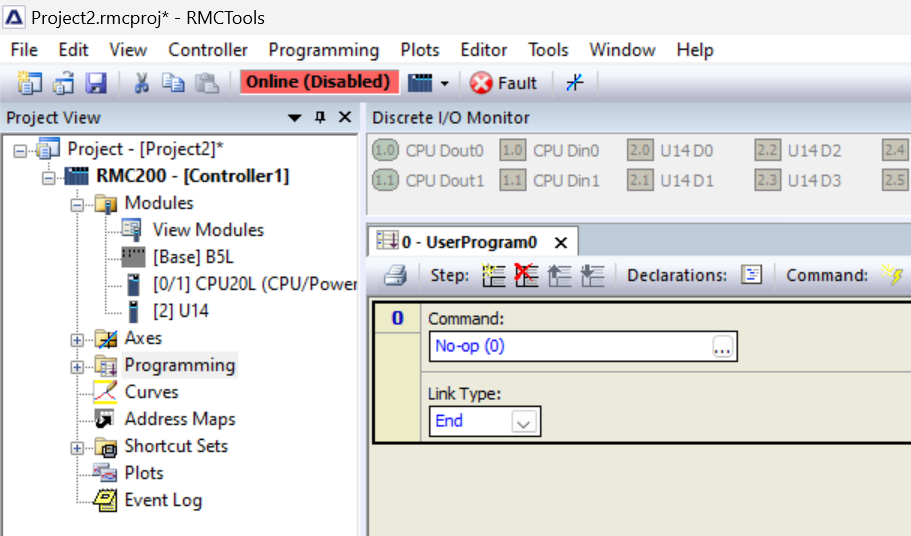
Mode
今回はRMC200のモードについて説明します。RMCToolsではOnline(Disabled)とい赤背景黒文字のところがありますね。実はRMC200の現在モードです。
Online(Disabled)をクリックするとMenuから直接各Modeに切り替えます。
RUN と PROGRAM モードは、ユーザプログラムとプログラムトリガを実行できるかどうかを指定します。RUN または PROGRAM モードは、必ずしも軸の動きに影響しません。
例えば、モーションコマンドは、RMCがRUNモードまたはPROGRAMモードには関係なく発行できます。
また、MC200にはモーションコマンドを受け付けず、すべての軸を無効にする無効モードもあります。
これらのモードをこれから簡単に紹介します。
Disabled mode
Disabled ModeはRMC200のみにある特殊モードです。
- すべての軸が無効になり、モーションコマンドを受け付けない。
- プログラムトリガーを停止します。
- ユーザープログラムは実行できない。
- CPU本体にあるRunおよびEn LEDが消灯する。
- すべての軸がDirect Output Haltで停止する。
- Controller Enabled BitがOFFになる。
- PROGRAMモードに入ったときにオンまたはオフになるように出力する
注意するのは無効モードに入ると、ダイレクト出力停止によって動作が停止する。無効モー
モードでは軸は動きません。
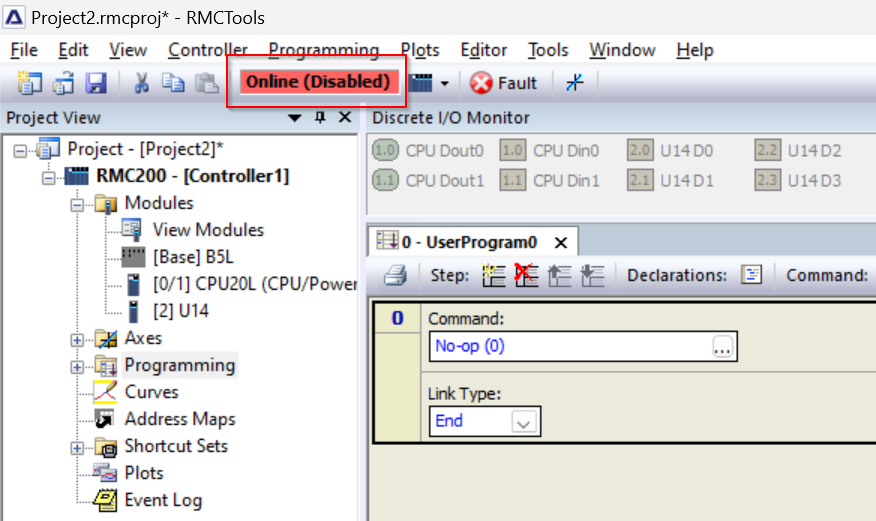
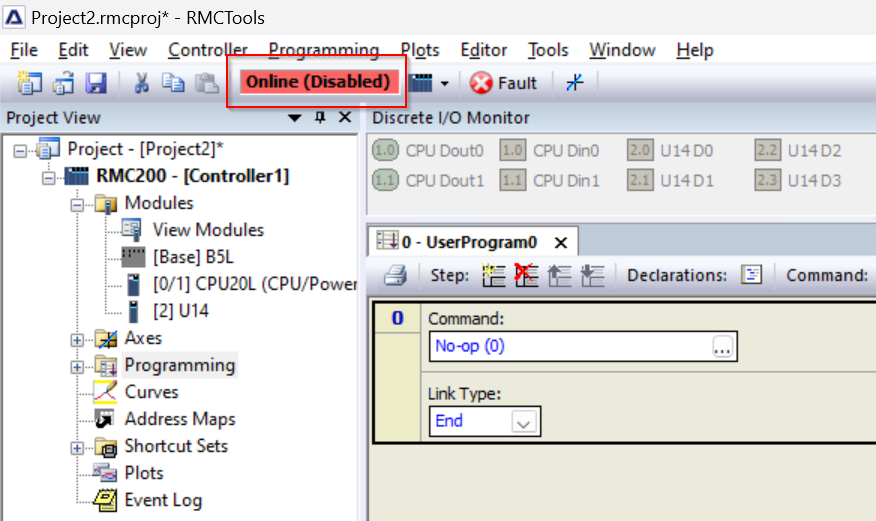
下図はRMC200がDisabled ModeになったときのLED状態です。

PROGRAM mode
次はPROGRAMモードです。PROGRAMモードになったRMC200では、
- プログラムトリガーが停止している。
- ユーザープログラムは実行できない。
- RUN LED が消灯する
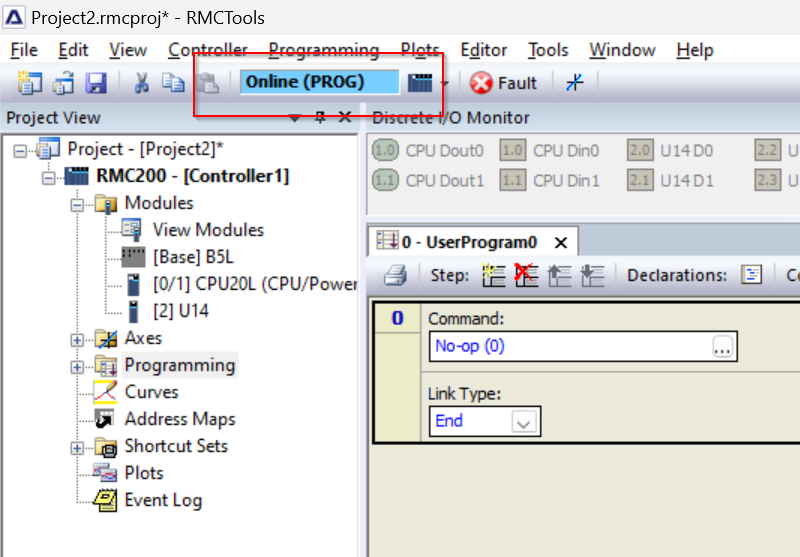
下図はRMC200がPROGRAM ModeになったときのLED状態です。

RUN mode
最後はRUN Modeです。RUNモードになったRMC200では、
- プログラム・トリガーが開始される(設定による)
- ユーザープログラムは実行できる。
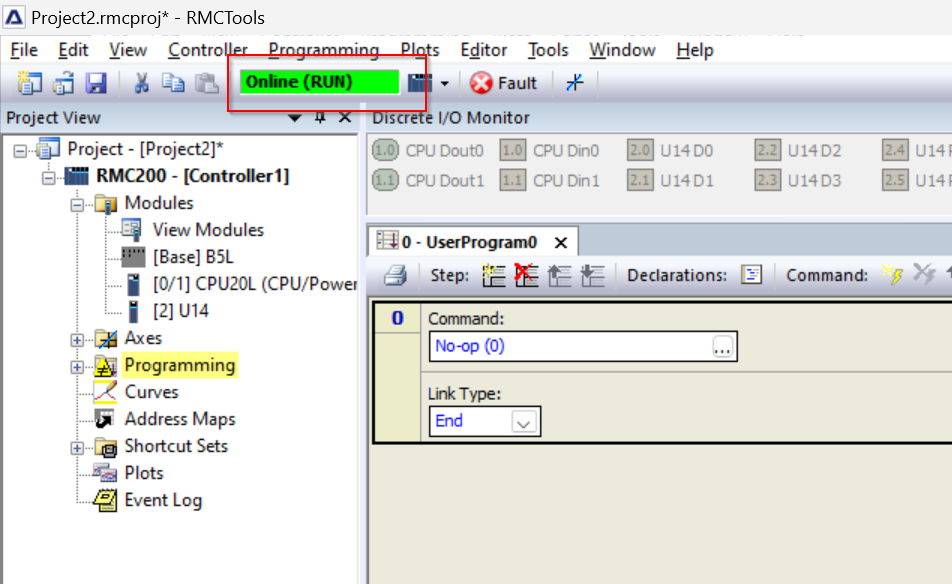
下図はRMC200がRUN ModeになったときのLED状態です。

Common Commands
次はRMC200でいくつ常用のコマンドを紹介します。
Fault Controller
このコマンドは、コントローラのすべてのモーションを停止でき、RMCはDisabled Modeに切り替えます。これにより、全てのタスクとプログラムトリガーを停止し、全ての軸を無効にします。コマンドを再送信したいなら、RMC を実行モードまたはプログラムモードにする必要があります。
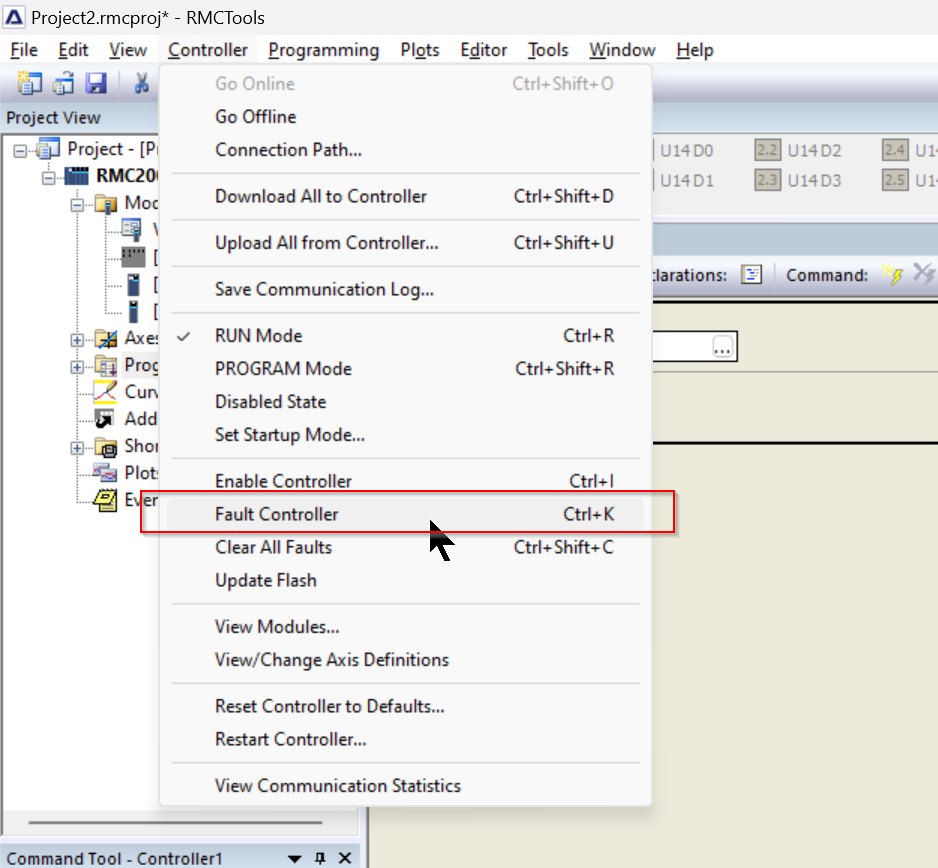
下図のような操作になります。
Enable Controller (7)
このコマンドは、RMC のすべての軸に有効になり、通常ではRMCの起動後に使用します。
RMCのモードはPROGRAM Modeになります。
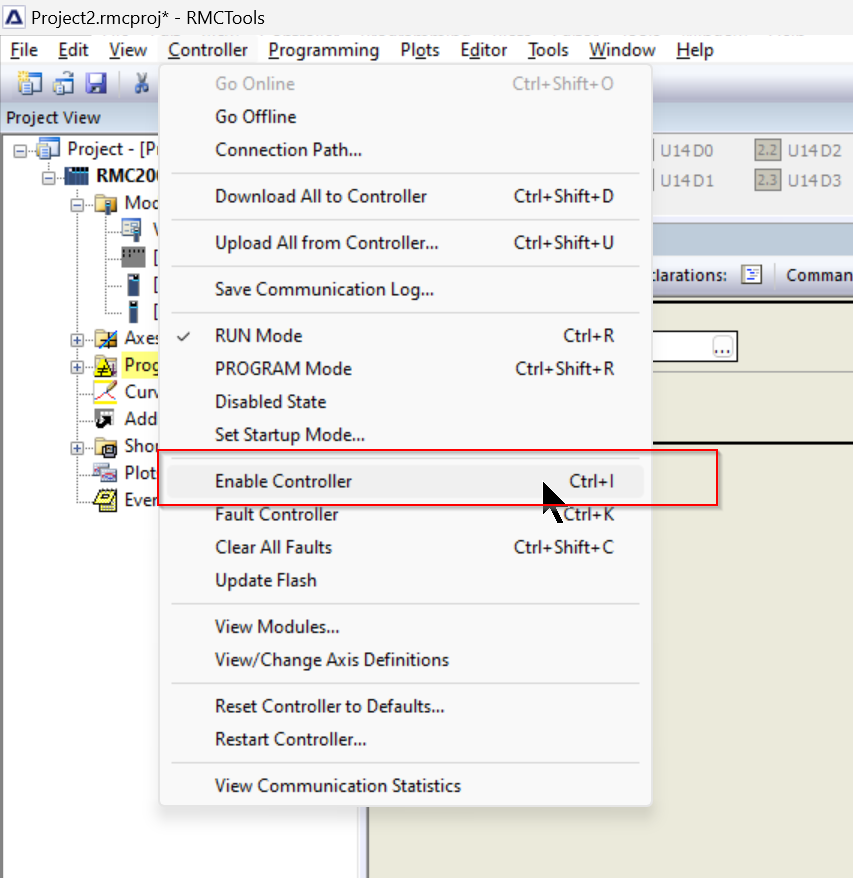
下図のような操作になります。
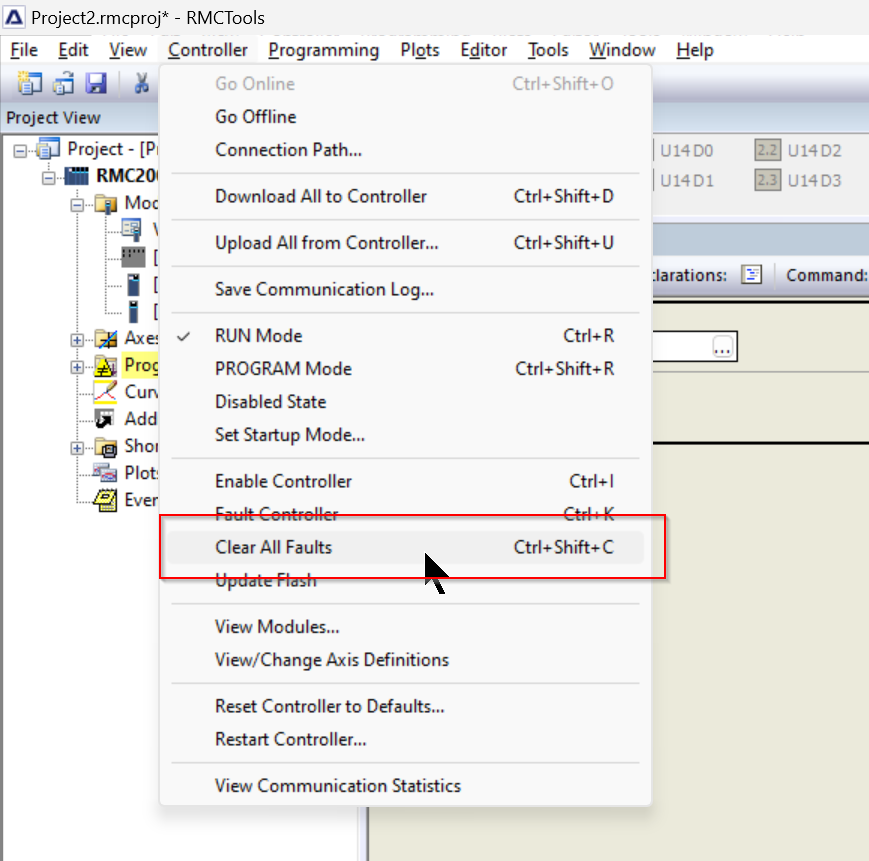
Clear Faults (4)
このコマンドは、保持されたエラー・ビットをすべてクリアできます。そしてどの状態が解消されたかを確認するために、フォルトをクリアするのに便利です。
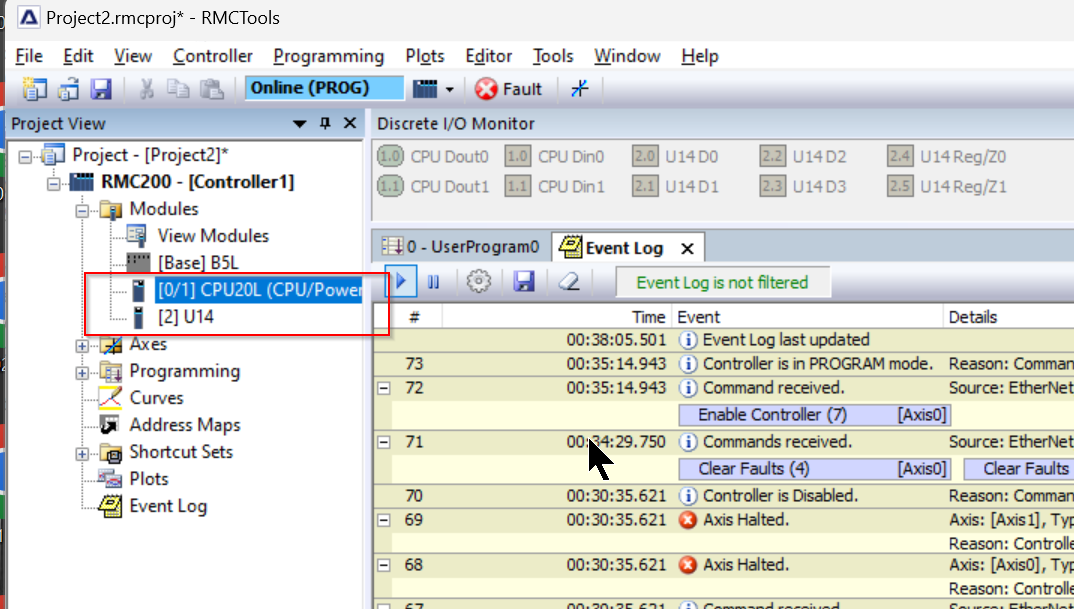
Event Log
RMC200ではCPU内部で発生したイベントが履歴として保存され、Event Logから過去のイベントを確認できます。
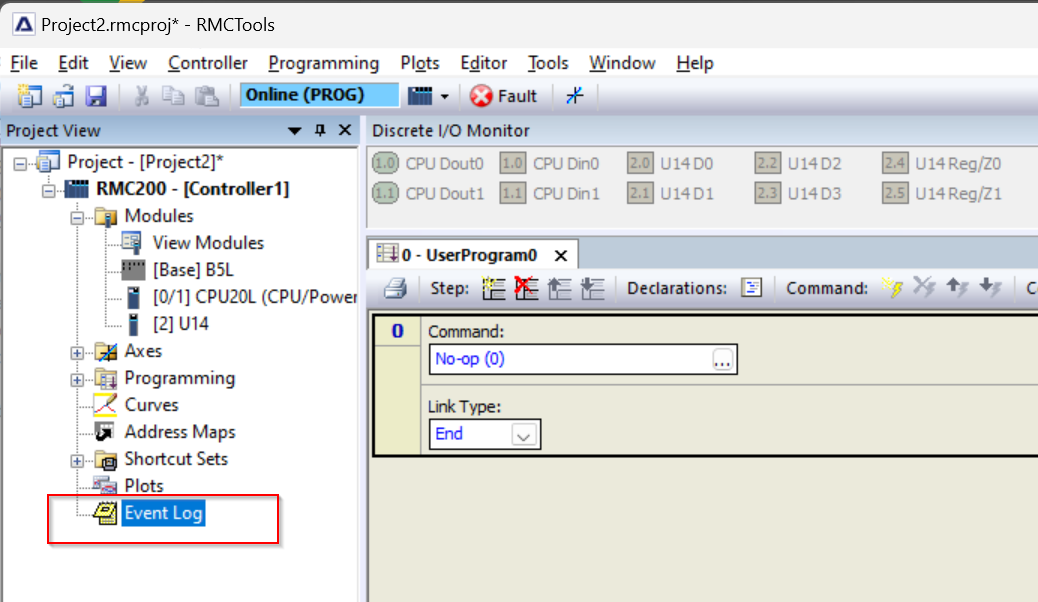
下図のようになります。

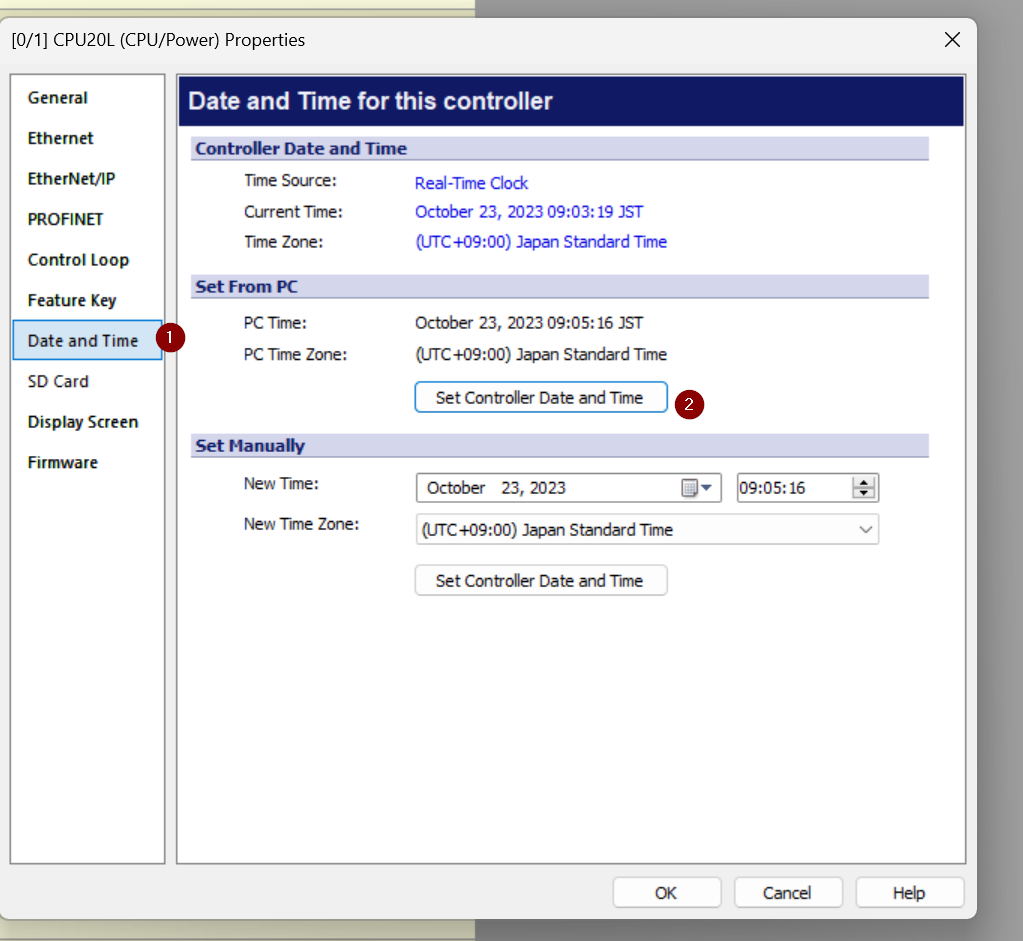
Time Setting
Event Logの時間が実際と合わないとエラー追跡などが難しくなりますので、CPUの時間を変更します。RMC200>[0/1]CPU20Lをクリックします。
Data and Time>Set Controller Data and Timeをクリックしてください。
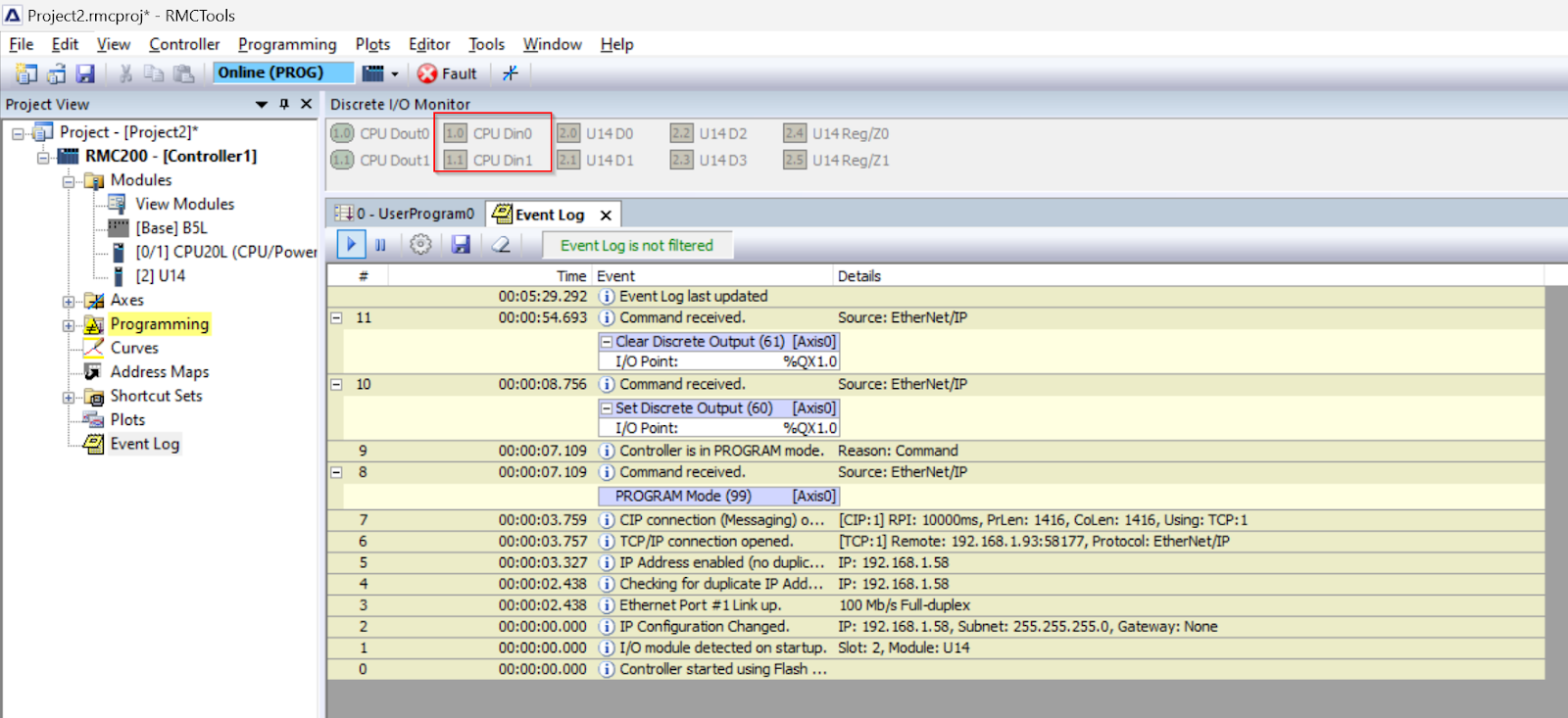
Discrete Inputs
最後はRMC200 CPU20L本体についてる入出力をMonitorします。CPU20LのDiscrete入力は、12〜24VDCの信号レベルに対応していて、最大3mAを消費する。各入力は個別に絶縁されています。
Discrete I/O Monitor画面でCPUDin0とCPUDin1があり、直接ON/OFF状態を確認できます。
こちらの動画から動作確認できます。
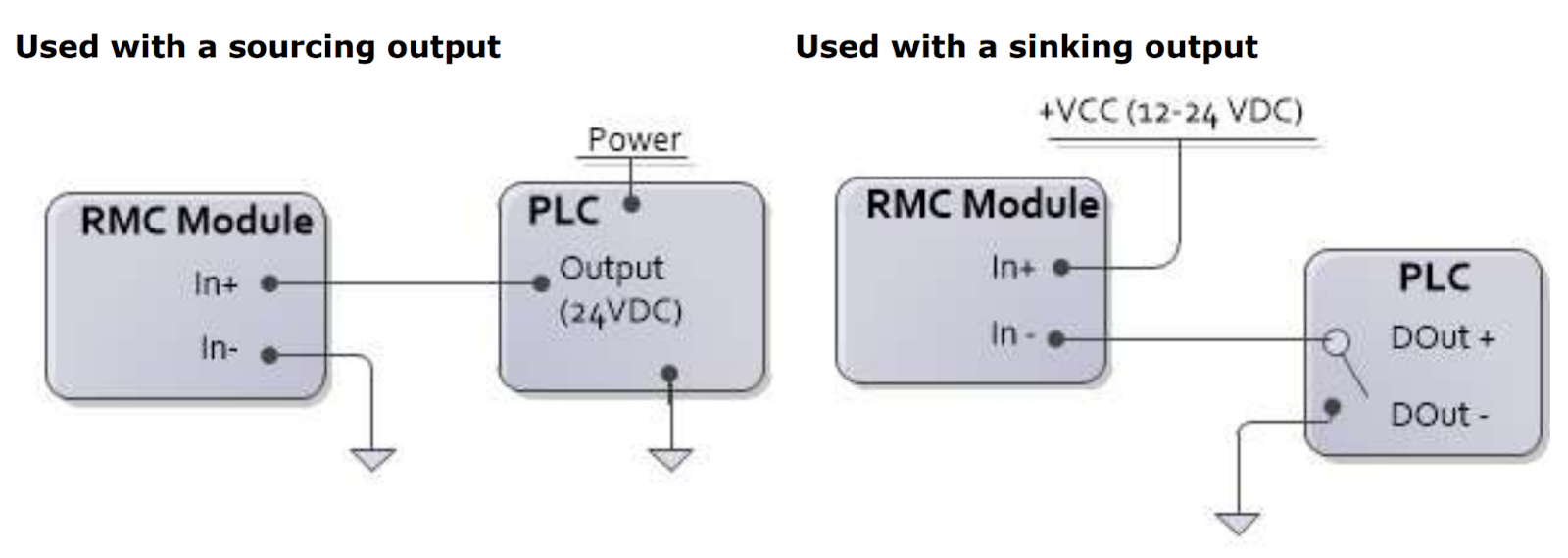
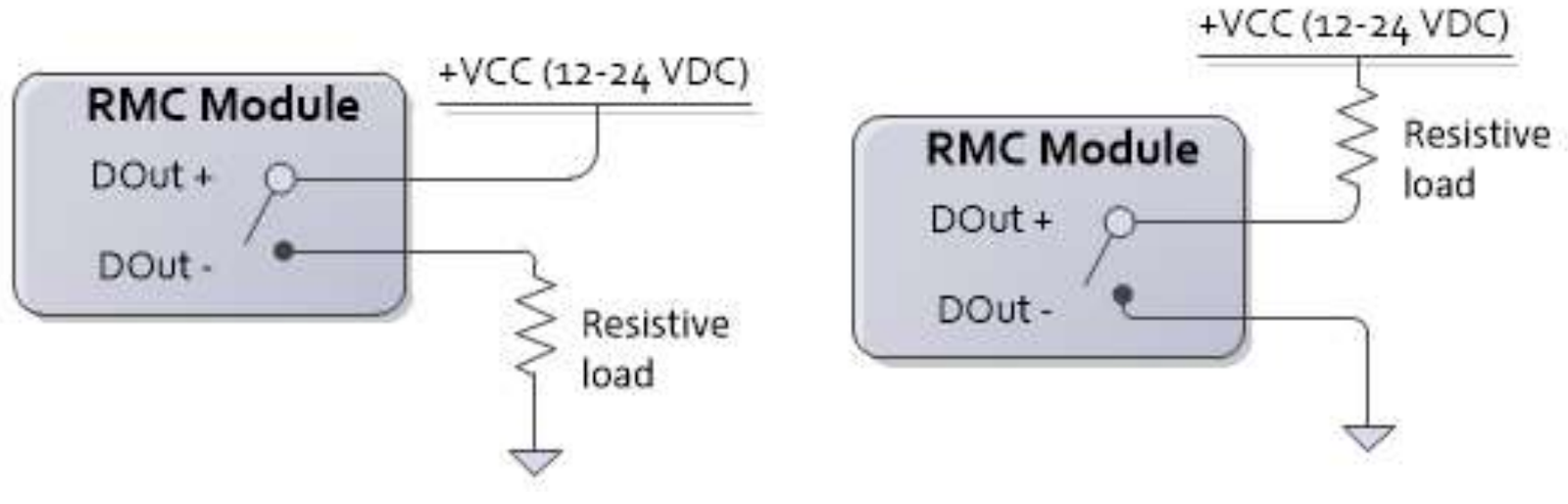
Discrete Outputs
CPU20L のDiscrete OutputはSolid state relaysで、オフ状態は高インピーダンスで、オン状態は低インピーダンス(最大8Ω、標準5Ω)です。出力はハイサイドまたはローサイド構成で配線可能で、最大電流75 mA・最大電圧30 Vになります。
CPU Dout0を右クリックするとToogle Output(出力反転)もしくはForce(強制出力が)できます。
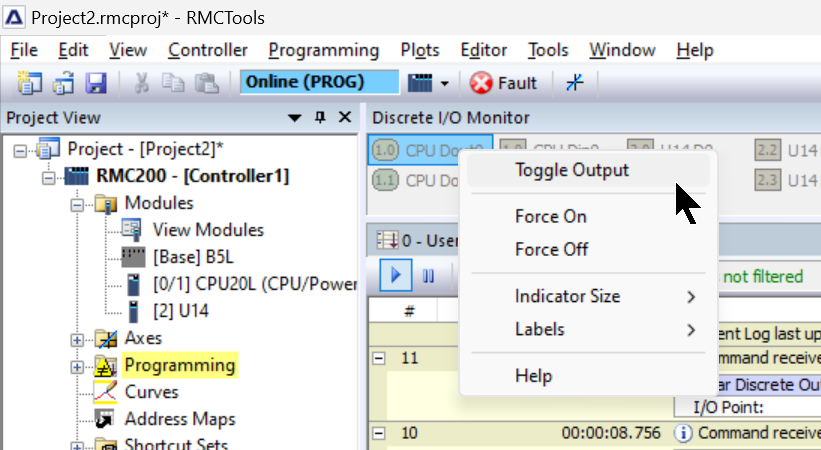
こちらの動画から動作確認できます。