
Keyence#KV8000 Socket通信
今回はKeyence KV8000を使用しSocket通信を実装します。ClientはKV8000でサーバーはPythonのものになります...
今回はKeyence KV8000を使用しSocket通信を実装します。ClientはKV8000でサーバーはPythonのものになります...
今回の記事ではPythonを使用してctrlX PLC Engineering APIを操作する方法を紹介します。ctrlX PLC En...

今回の記事ではPyPlcnextRscのAPIを使用し、AXC F 2152 CPUの変数(単体変数・配列・構造体)を読み書きする操作をサ...
get-pip.py 下記のコマンドでget-pip.pyを取得します。 curl -o get-pip.py if ...

今回は、RoboDK と Beckhoff TwinCAT を使って Etherent/IP ネットワークを構築してみます。スキャナ側がR...
RSCはRemote Service Callsの略称でPLCNEXTのProcessとデバイス間で通信します。RSCはAPIを提供してお...

Beckhoff TwinCAT TF6310 では複数のTCP/IP Server/Client の実装をSupportできます。 ...
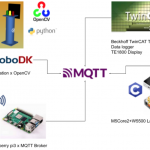
私のBlogへようこそ! 今回のProjectはRoboDKからロボットStationを作成し、ロボットが動作してる間となりにあるL...

この記事ではPythonを使用しMQTT Clientを実装する方法を紹介します。ちなみにBroker側はRaspberry-pi3を使用...

Building wheels for collected packages: opencv-python Building whe...