
Linux#Windows上でWSLとVSCODEで開発環境を構築
WSL(Windows Subsystem for Linux)とはWindows上でLinuxを動かすための機能です。 でもVir...
WSL(Windows Subsystem for Linux)とはWindows上でLinuxを動かすための機能です。 でもVir...
この記事ではPLCNEXT AXCF 2152(Firmware2023.0)を電源入れるときに自動的にmosquittoのMQTT Br...
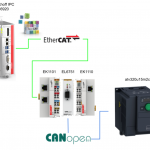
今回の記事ではBeckhoffのEL6751を使用しCANOPEN Masterを立ち上げ、Schneider社のATV320とCAN通信...

今回の記事ではpfc-kbus-apiを使用しPLC RUNTIMEなしでPFC200 ControllerにインストールされてるIOモジ...
Wago PFC CPUのWeb serverにアクセスし、Configuration>Ports>Network Servi...
PiでScriptを自動起動のセットアップ方法を紹介します。 下記のFileにアクセスします。 sudo nano /home...
今回はDobot CR5の関節座標・直角座標・User Frameについて説明します。よろしくおねがいします。 Thanks...

今回の記事ではPLCNEXTを使用しDockerイメージを作成し、podmanから起動させます。Docker Fileのコンセプトにも少し...

この記事ではWAGO にDockerを導入する手順だけではなく、WAGO PFC200 ControllerにDockerを使用するメリッ...

EXOR JSmart710MのTutorial第2話です。今回JSmart710MのVNC Viewr機能を有効にします。よろしくお願い...