今回の記事ではFANUCロボットの各軸についてる合いマーク(ケガキ線)を利用してゼロ度位置で簡単マスタリング操作を行います。この簡単マスタリング操作によって以下のアラームを解除できます。
- サーボ-062 BZAL バッテリーz炉
- サーボ-038 パルスカウト不一致
- サーボ-072 CMA
などなど。
さ、FAを楽しもう!

前書き
いつも私の技術ブログとYouTubeチャンネルをご覧いただき、心より感謝申し上げます。また、いまFullさん(full@桜 八重 (@fulhause) / X)と共に毎週水曜日の夜にお届けしている「高橋クリス」ラジオ番組を運営しています。
技術は独り占めせず、届けるもの
私たちは工場の生産技術や制御に関する技術情報を、ブログや動画などで無料公開しています。「知識は誰でもアクセスできるべき」という信念のもと、現場で役立つ具体的なノウハウやトラブル事例などを発信してきました。すべて無料で続けているのは、「知らなかったせいで困る人」を少しでも減らしたいからです。
また、もしあなたの現場で…
- 「このPLCとデバイスの組み合わせ、ちゃんと動くのかな?」
- 「EtherCAT通信でうまくいかない部分を検証してほしい」
- 「新しいリモートI/Oを試したいけど社内に検証環境がない」
など、困っている構成や試してみたいアイデアがあれば、ぜひお知らせください。機器の貸出や構成の共有が可能であれば、検証し、記事や動画で発信します(ご希望に応じて匿名対応も可能です)。
支援のかたち
現在、私達の活動はほぼ無償で続けており、記事や動画の制作には、時間と検証環境の整備が必要です。この活動を継続的にコンテンツを提供するためには、皆様の温かいご支援が大変重要です。
メンバーシップ(ラジオの応援)
Fullさんとのラジオをより充実させるための支援プランです。
https://note.com/fulhause/membership/join
Amazonギフトリスト
コンテンツ制作に必要な機材・書籍をリストにしています。
https://www.amazon.co.jp/hz/wishlist/ls/H7W3RRD7C5QG?ref_=wl_share
Patreon(ブログ・動画活動への応援)
月額での小さなご支援が、記事の執筆・検証環境の充実につながります。
https://www.patreon.com/user?u=84249391
Paypal
小さな支援が大きな力になります。
https://paypal.me/soup01threes?country.x=JP&locale.x=ja_JP
知ってたら助かること、届けたいだけです
あなたの応援が、知識の共有をもっと自由で持続可能なものにしてくれます。これからもどうぞよろしくお願いします。
soup01threes*gmail.com
技術はひとりじゃもったいない。
手順
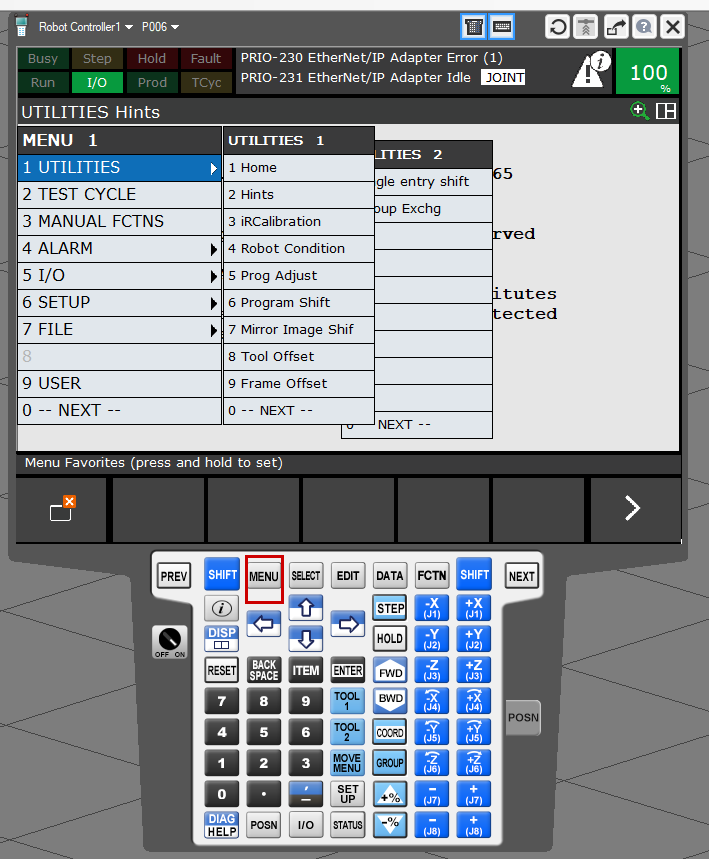
MENU画面を表示させます。
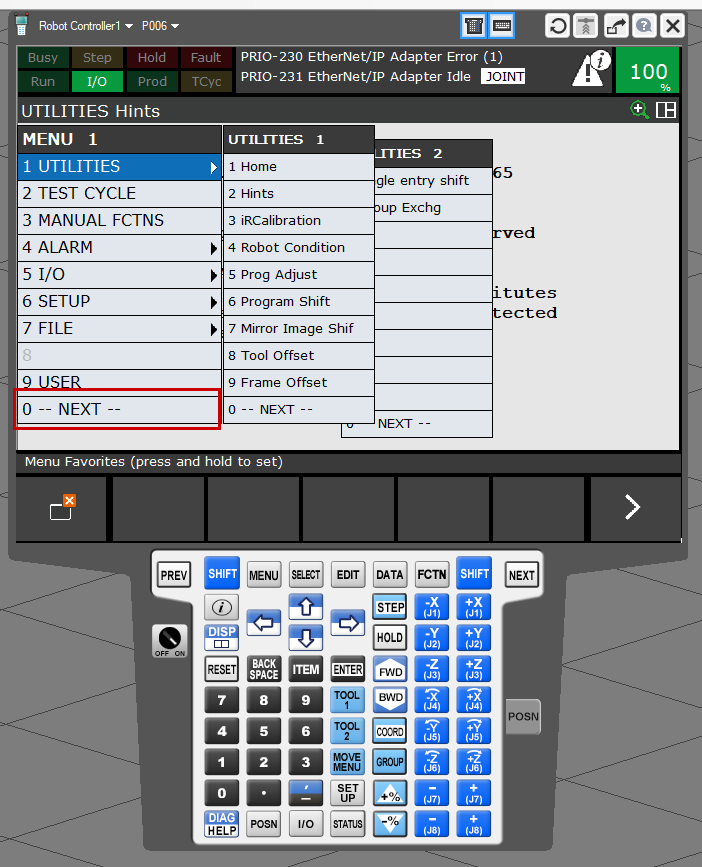
0 –NEXT–を選択します。
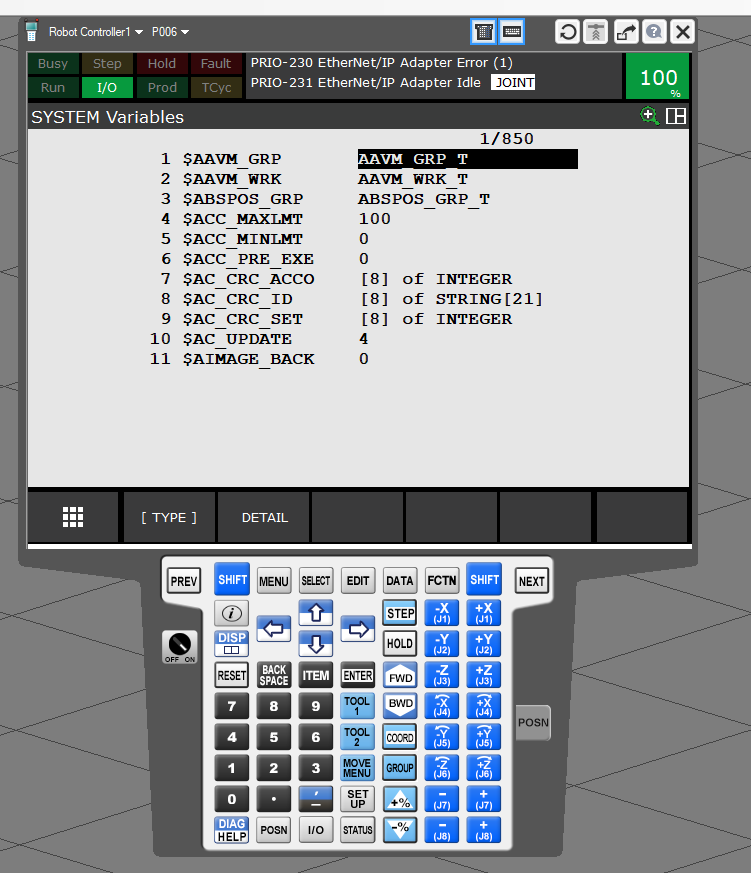
6 SYSTEM→2 Variablesを選択します。
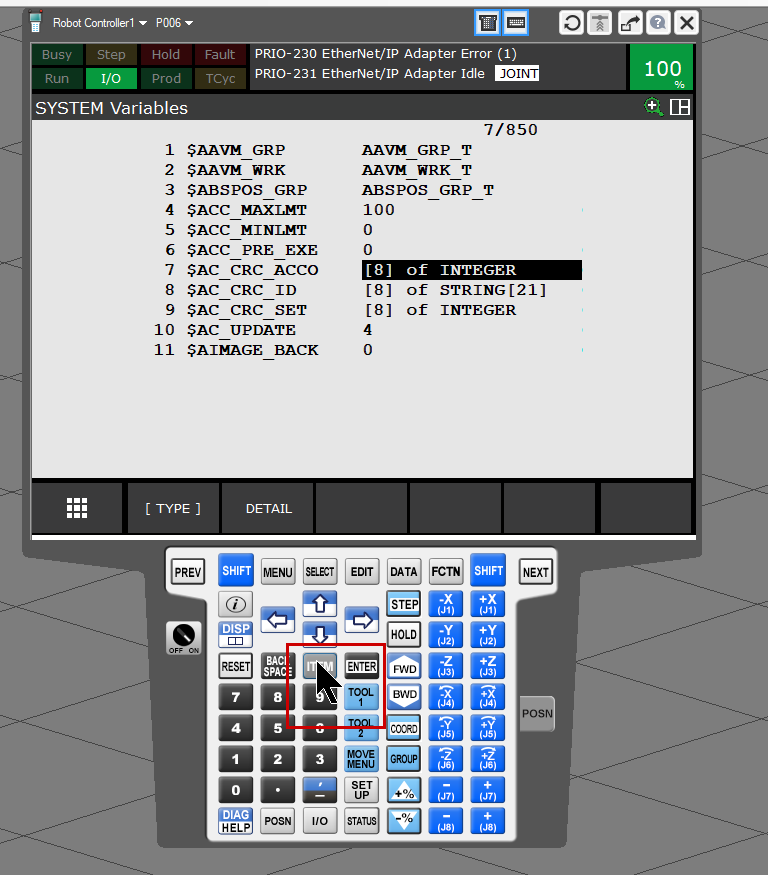
こちらはファナックロボットコントローラーのシステム変数設定画面です。
ITEMボタンをクリックします。
ロボットTeaching pendantに”Enter line number:”のメッセージが表示されます。361を入力します(実際のロボットコントローラーによって番号が異なる場合があります)。
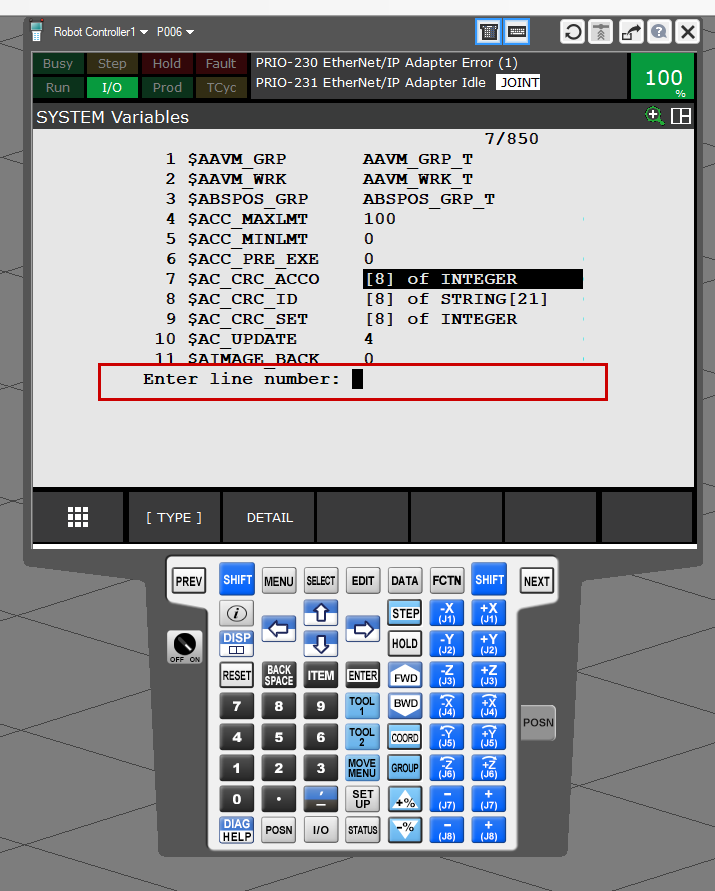
361 $MASTER_ENBを0→1に変更します。もし元々1ならば次に進んで行きましょう。

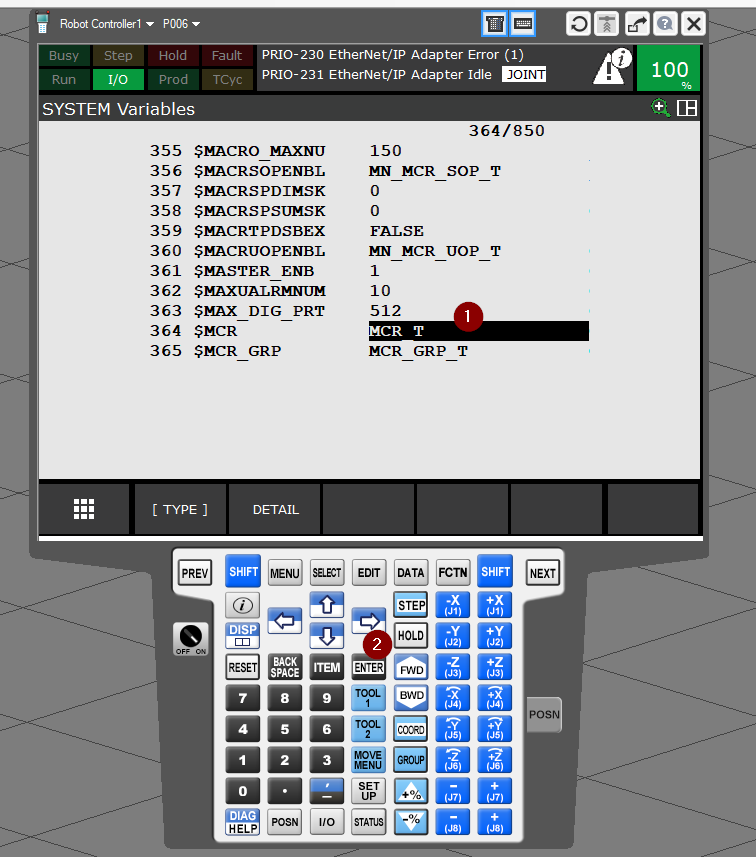
今度は 364 $MCRを選択し、ENTERをクリックします。
こちらは$MCRの設定画面です。
$SPC_RESETをTRUEに設定します。そのパラメータは一瞬だけTRUEになり、またすぐFALSEに戻ります。

次はロボットコントローラーの電源をOFF/ONします。それによってサーポ062がリセットされます。

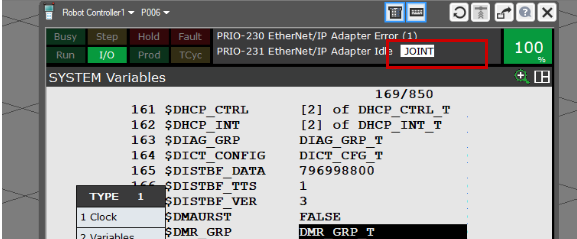
先程と同じ操作でSYSTEM変数画面に入り、169 $DMR_GRP変数を開きます。
更にENTERボタンをクリックし画面を開きます。

こちらは$DMR_GRPの設定画面です。

$MASTER_COUN変数を開きます。

この画面に表示されているマスタリングデータ1-6をメモしてください。
(場合によって7-8にもあります)
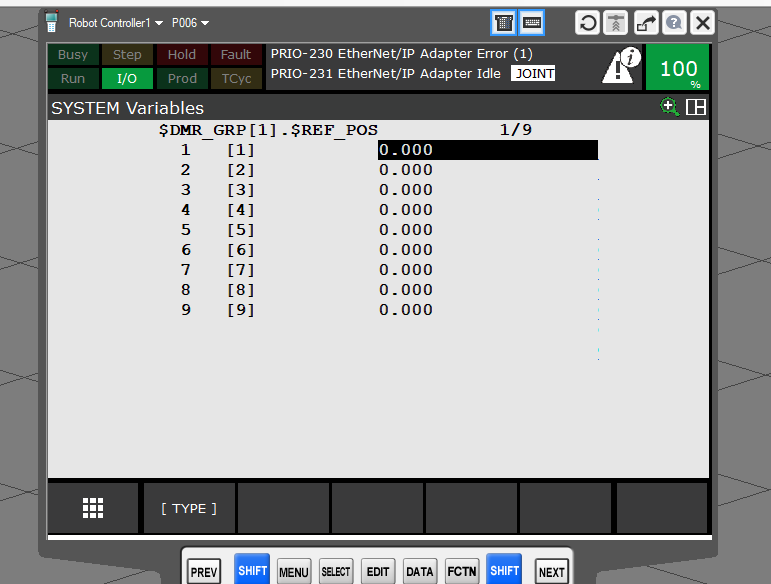
次はPREVボタンをクリック、前の画面に戻ります。 6 $REF_POSをクリックします。

$REF_POS値がすべて0であることを確認してください。もし0ではなければ0に設定してください。
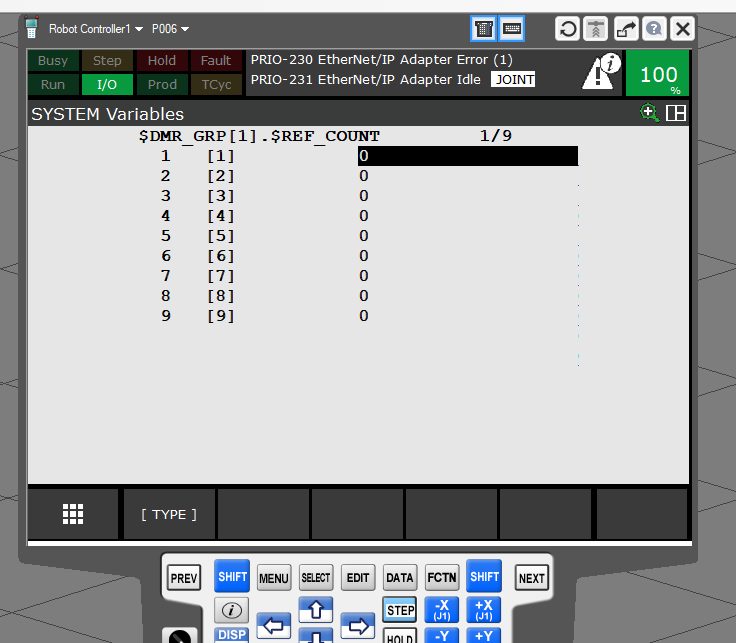
次はPREVボタンをクリック、前の画面に戻ります。 今度は7 $REF_COUNTを開きます。

その値はMASTER_COUNと同じであることを確認してください。もし違う場合は、MASTER_COUNの値をREF_COUNTに上書きしてください。
次は 5 $REF_DONEをTRUEに設定します。

次はアラームを解除し、各軸に設定します。
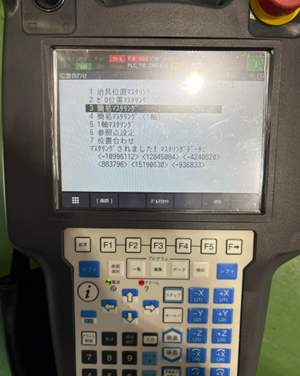
各軸を合いマーク(ゼロ度)に合わせて移動してください。

次はTYPE→ 3 Master/Calをクリックします。

こちらはMaster/Calの設定画面です。
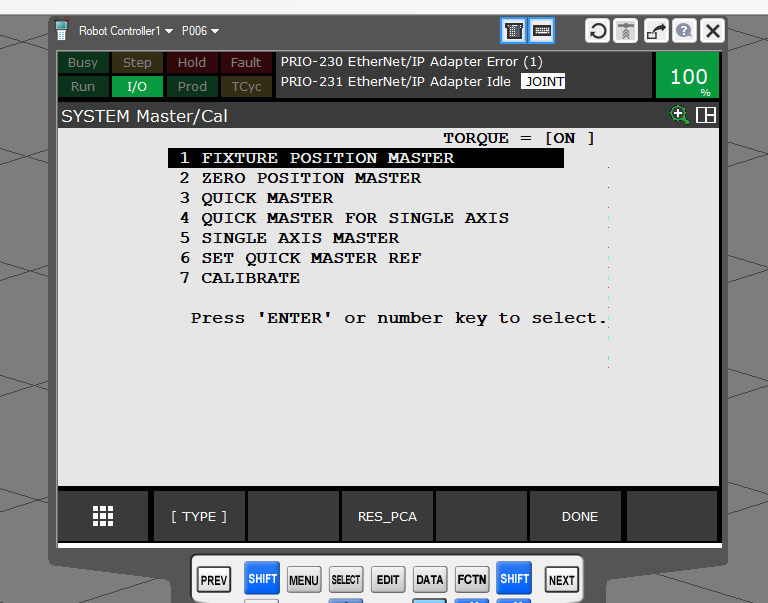
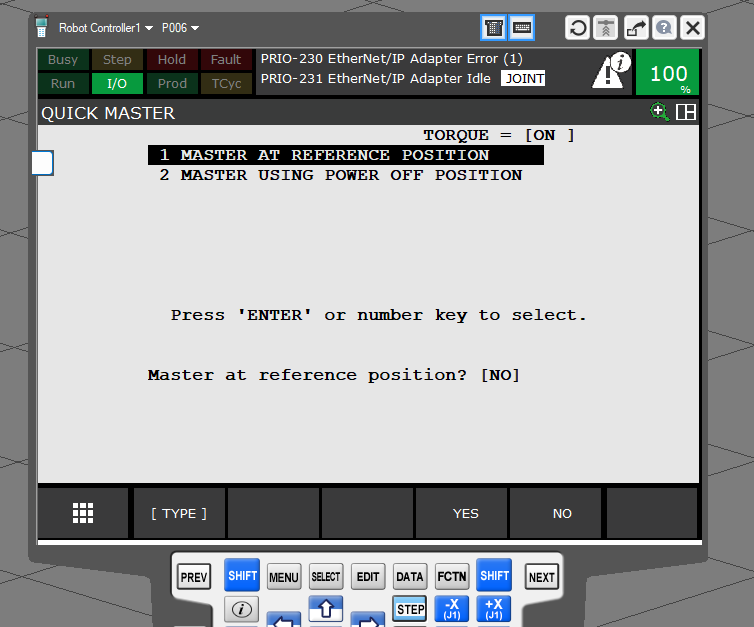
次は 3 QUICK MASTERをクリックします。
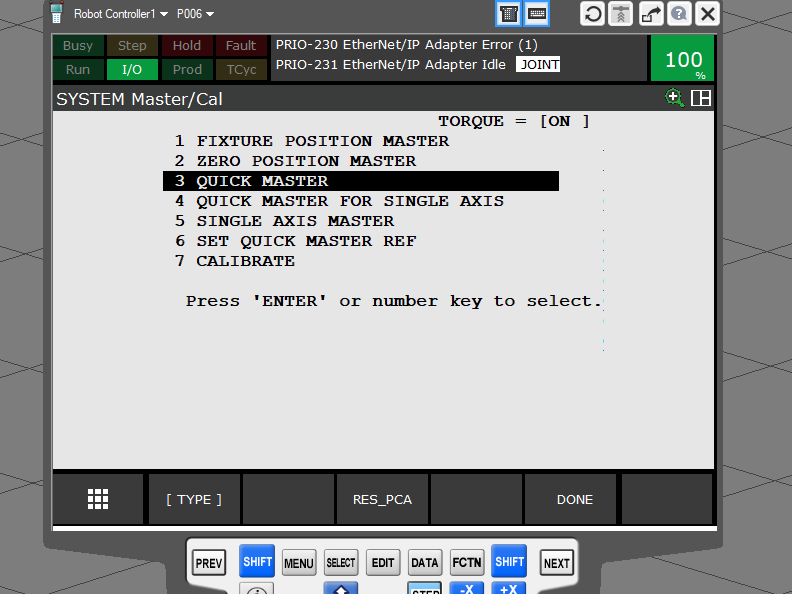
1をクリックし→YESで確定します。
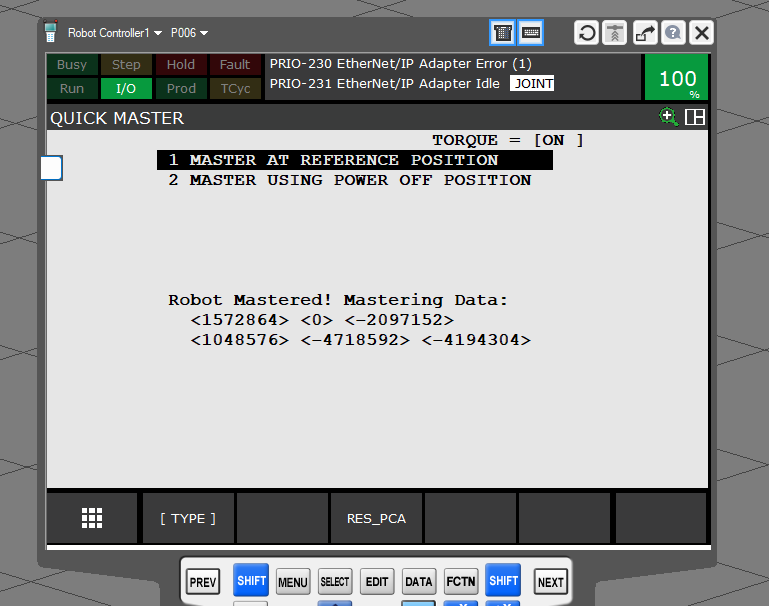
Done!
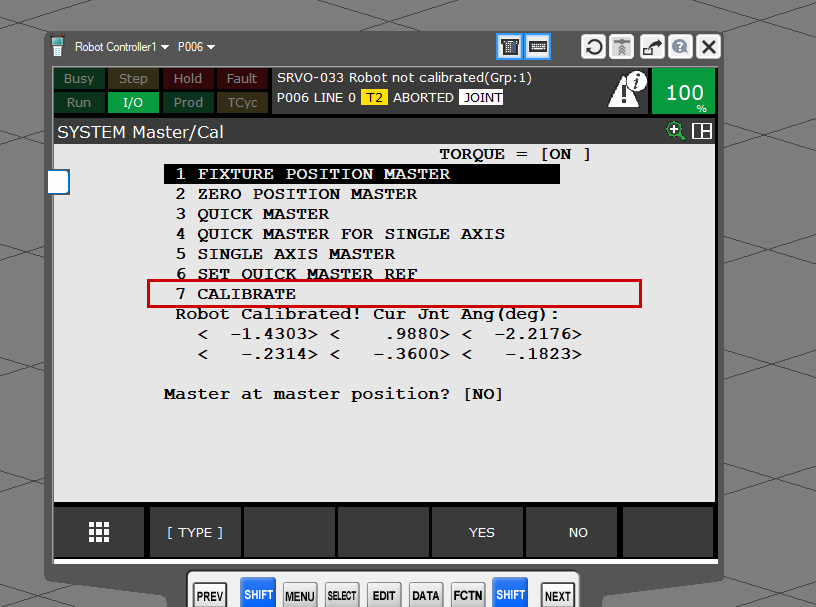
最後は7 CALIBRATEをクリックし完成しましょう。
こちらは実際の操作画面です。