私のBlogへようこそ!
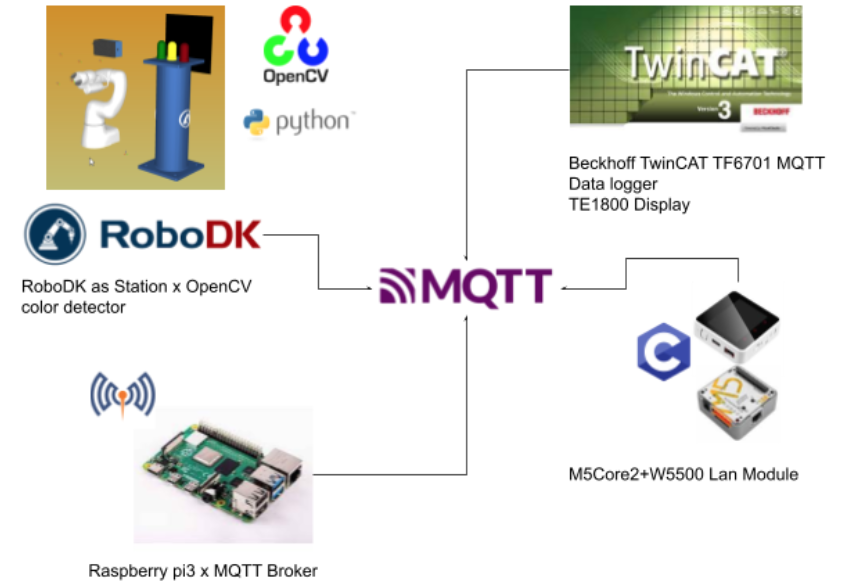
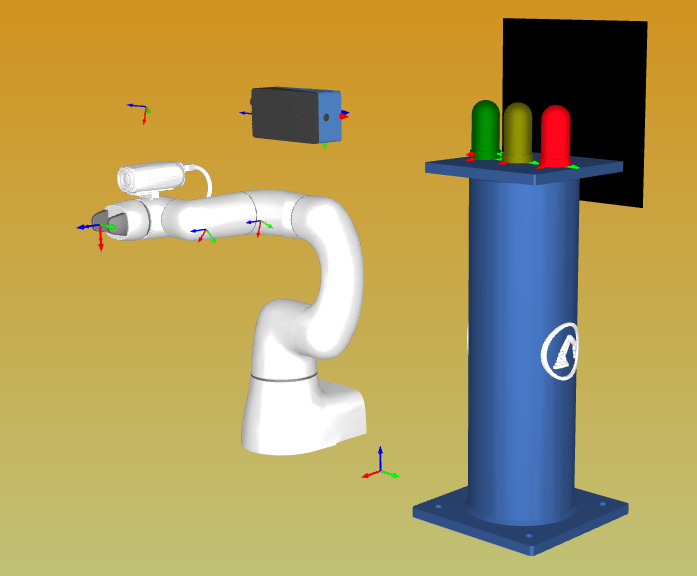
今回のProjectはRoboDKからロボットStationを作成し、ロボットが動作してる間となりにあるLED Towerが赤、緑、黄色を表示させます。RoboDK内でPythonとOpencvを使用しColor Dectectorを実装し、現在LED Towerの色を検知します。
もちろんそれだけではなく、RoboDK StationがPythonでMQTT Clientを実装しRaspberry-piのMQTT BrokerにMessageをPublishします。
TwinCAT側ではTF6701 Functionを使用しRaspberry-piのMQTT BrokerからRoboDKのTopicをSubscribeし、現在のLED Towner色を取得しTF1800表示させ、データも記録する。
最後に、 M5Stack Core2とW5500 Lan Moduleからも同じのTopicをSubscribeし、RoboDKのLED Towner現在の状態をLED Display表示します。
今回のProjectはいくつかのゴールがありますが、記事内でできるだけ丁寧に説明しますので、よろしくお願います。
- RoboDK Stationを作成しLED Townerを作る
- RoboDK 2D Camera simulation inteface使用
- Opencvを理解する
- ImageをFile Systemから読み込む
- ImageをRoboDK の2D Camera Simunlation interfaceから読み込む
- RGB/HSV Modelはなにか
- Color Detectorの作り方
- ObjectにContoursを書く方法
- PythonからMQTT Clientを実装する方法
- Beckhoff TwinCAT TF6701 の使用方法
- Beckhoff TwinCATからDataを記録するのに必要なLocal-time取得とLoggingプログラム作成
- Raspberry-pi3からMQTT Brokerを立ち上げる
- M5Stack Core2とW5500 Lan ModuleのMQTT Client実装方法
Other Project
こちらはこの間のProjectです。
興味ある方はみてください。
Color Detecor
Opencv installation
以下のコマンドでOpencvをインストールします。
| pip install opencv-python |
if Trouble
Concept
これからOpencvのいくつかのコンセプトと使用するテクニックを説明します。
Import images/Show
まずFile system内にあるImageをOpencvに読み込んで表示します。
| import cv2 import numpy as np # Reading the image img = cv2.imread(‘image.jpg’) # Showing the output cv2.imshow(“Image”, img) cv2.waitKey(0) cv2.destroyAllWindows() |
このようなPopupが表示されます。
RGB color model
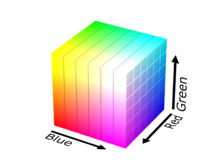
RGB(またはRGBカラーモデル)とは、色の表現法の一種で、赤 (Red)、緑 (Green)、青 (Blue)の三つの原色を混ぜて幅広い色を再現する加法混合の一種である。RGBは三原色の頭文字である。
各パラメータは0-255になります。
もっと知りたい方はWikiを参考にしてください。
https://ja.wikipedia.org/wiki/RGB
Becareful!
Opencvでは順番はRGBではなくRGRになります。
RGB Calculator
インターネットにはRGBSimulatorがたくさんありますので練習してください。
https://www.w3schools.com/colors/colors_rgb.asp
HSV Model
Wikiからよりますと、
HSV色空間(英: HSV model)は色相(Hue)、彩度(Saturation・Chroma)、明度(Value・Brightness)の三つの成分からなる色空間。HSBモデル(Hue、Saturation、Brightness)とも言われる。
- 色相 – 色の種類(例えば赤、青、黄色)。0 – 360の範囲(アプリケーションによっては0 – 100 % に正規化されることもある)。
- 彩度 – 色の鮮やかさ。0 – 100 % の範囲。刺激純度と colorimetric purity の色彩的な量を比較して「純度」などともいう。色の彩度の低下につれて、灰色さが顕著になり、くすんだ色が現れる。また彩度の逆として「desaturation」を定義すると有益である。
- 明度 – 色の明るさ。0 – 100 % の範囲。
もっと知りたい方はWikiを参考にしてください。
https://ja.wikipedia.org/wiki/HSV%E8%89%B2%E7%A9%BA%E9%96%93

Becareful!
OpencvではHは0-179までSとVは0-255になります。
HSV Calculator
同じくネットではHSV Simulatorがたくさんあります。http://color.lukas-stratmann.com/color-systems/hsv.html
Mask
私たちはRGBモデルではなくHSVモデルで色を感知します。
こちらのTableは3色のHSVのRangeです。
| Rnage | Range in Opencv | |
| Red | 0-60,300-360 | 0-30,150-179 |
| Green | 60-189 | 30-90 |
| Blue | 180-300 | 90-150 |
Sample
まず最初にバナナのImageから黄色を検出してみます。
lower_bound とupper_boundのNumpy配列からMaskを作成し、黄色をFilter Outします。
| import cv2 import numpy as np # Reading the image img = cv2.imread(‘image.jpg’) # convert to hsv colorspace hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) # lower bound and upper bound for Green color lower_bound = np.array([20, 50, 50]) upper_bound = np.array([100, 255, 255]) # find the colors within the boundaries mask = cv2.inRange(hsv, lower_bound, upper_bound) # Segment only the detected region segmented_img = cv2.bitwise_and(img, img, mask=mask) cv2.imshow(“Image”, segmented_img) cv2.waitKey(0) cv2.destroyAllWindows() |
よしバナナ見ましたね!
Contours
Contours はObjectの枠などを示すもので、以前BeckhoffのTc3_Vision記事で説明しましたので、よかったら参考にしてください。
Sample
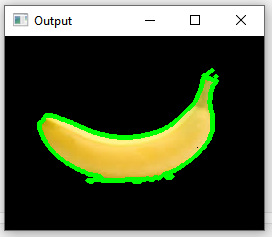
前の例ではバナナImageから黄色を検知しましたので、今度はバナナのContoursを描き出してみます。
| import cv2 import numpy as np # Reading the image img = cv2.imread(‘image.jpg’) # convert to hsv colorspace hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) # lower bound and upper bound for Green color lower_bound = np.array([20, 50, 50]) upper_bound = np.array([100, 255, 255]) # find the colors within the boundaries mask = cv2.inRange(hsv, lower_bound, upper_bound) # Segment only the detected region segmented_img = cv2.bitwise_and(img, img, mask=mask) # Find contours from the mask contours, hierarchy = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) output = cv2.drawContours(segmented_img, contours,-1,(0,255,0),3) # Showing the output cv2.imshow(“Output”, output) cv2.waitKey(0) cv2.destroyAllWindows() |
Contoursが描きされました!
WorkFlow
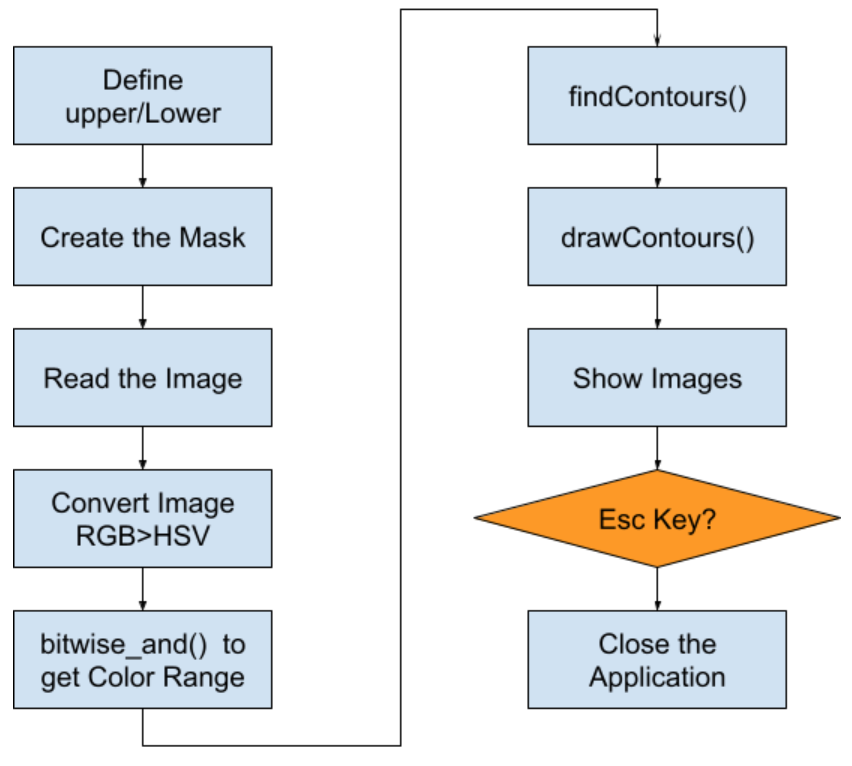
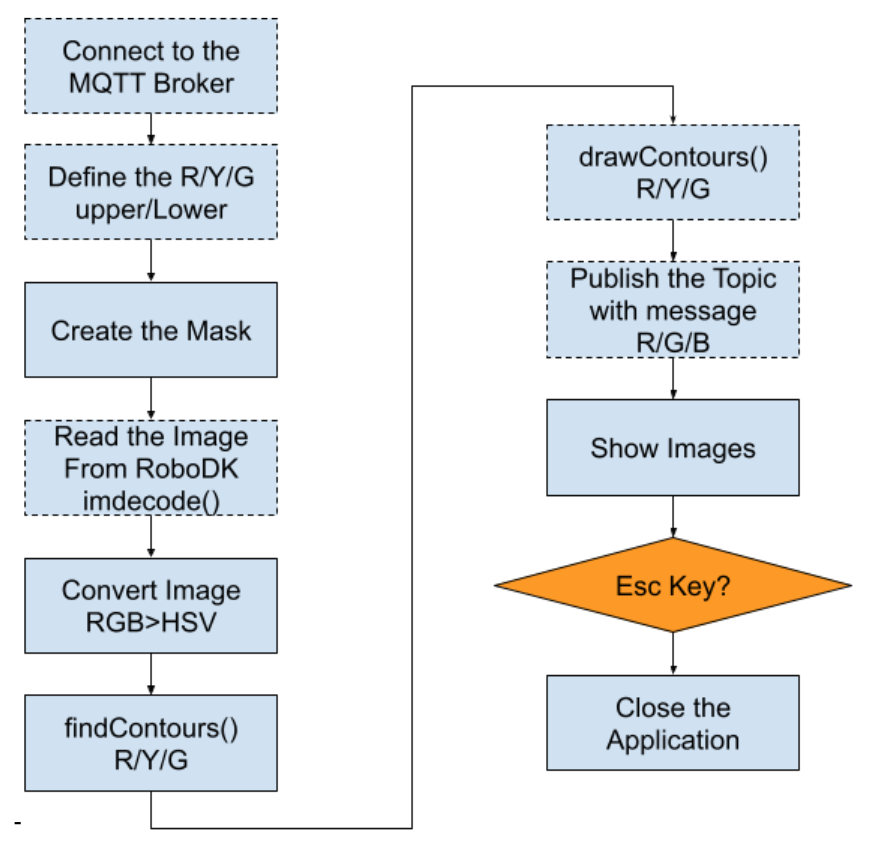
最後に、私は以下のFlowでColor Detecorを作ります。
RoboDK Side
RoboDK Stationでは3色のLED TownerとRobotを配置し2D Camera InterfaceでLED Townerを撮影し色を検知し、そしてMQTT を使用しBrokerにMessageをPublishします。
今回は手動でRobotプログラムをStartしましたが、もちろんPLCなどから経由でもOKです。
Reference Link
Light Tower Signal
次はどうやってLED TownerのON/OFF設定するかを説明します。
Ideaは簡単でLED を2つ重ねて一つを明るい色でもう一つは暗い色にします。
最後はEventを使用しLEDを表示・非表示します。
RoboDKの公式Youtubeでは詳しい説明あります。

Red
これは赤色です。

Yellow
これは黄色です。
Green
これは緑色です。
Signal Flow
Color TowerはRobotの状態により違う色が表示されます。
Robotプログラムが起動されたら、緑=ON、赤と黄色=OFF。
Robotプログラムが起動されIO_5待ち状態なら、緑と黄色=ON、赤=OFF。
Robotプログラムが起動されIO_5待ち状態過ぎたら、緑=ON、赤と黄色=OFF。
Robotプログラムが完了したら、赤=ON、緑と黄色=OFF。
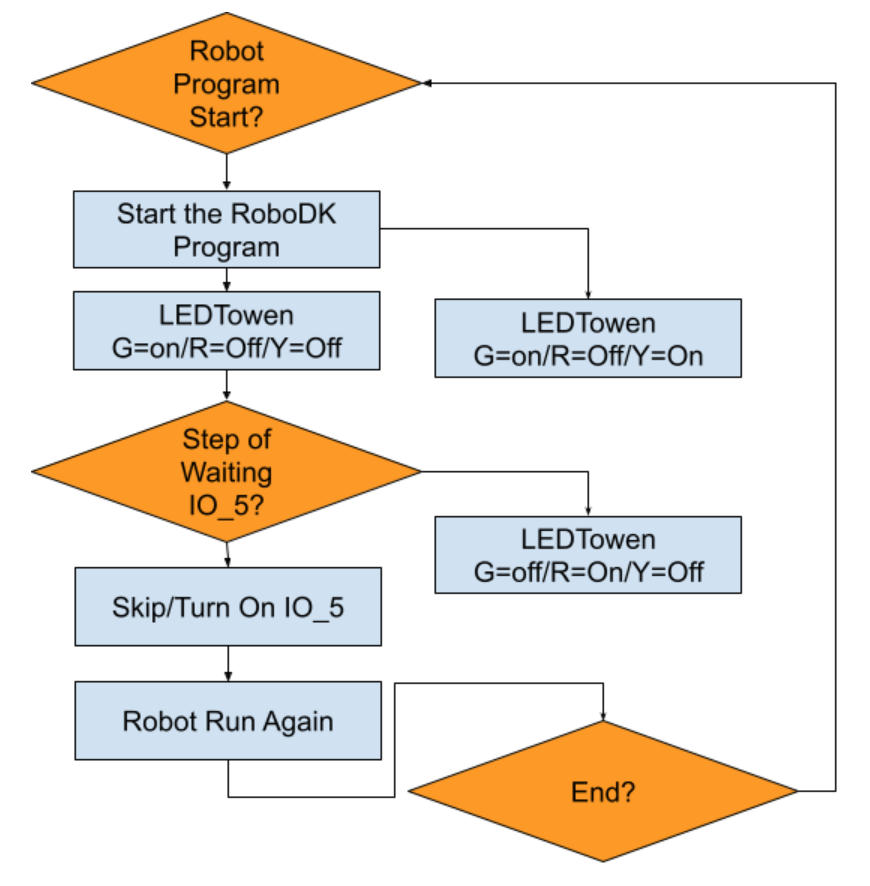
WorkFlow
こちらはColor Detecorと連動したWork Flowです。あまり変わらずMQTT Clientのプログラムが追加されただけです。
MQTTからPublishされたTopicはLED TowerのON./OFFです。
–
Code
以下はColor DetectorとMQTT Clientを実装したCodeです。
| from robodk import robolink # RoboDK API from robodk import robomath # Robot toolbox import cv2 import numpy as np import paho.mqtt.client as mqtt #MQTT Client def on_connect(client,userdata,flag,rc): print(‘Connected with result code ‘+str(rc)) client.subscribe(‘RoboDK/Station/s1/Lamp/Red’) def on_disconnect(client,userdata,flag,rc): if rc !=0: print(‘Something Wrong..’) def on_publish(client,userdata,mid): print(‘publish: {0}’.format(mid)) RDK = robolink.Robolink() count=0 CAM_NAME=’Camera1′ # GREEN_LOWER_BOUND=np.array([40, 150, 150]) GREEN_HIGHER_BOUND=np.array([100, 255, 255]) RED_LOWER_BOUND=np.array([130, 150, 150]) REG_HIGHER_BOUND=np.array([179, 255, 255]) YELLOW_LOWER_BOUND=np.array([20, 150, 150]) YELLOW_HIGHER_BOUND=np.array([35, 255, 255]) cam_item = RDK.Item(CAM_NAME) if not cam_item.Valid(): raise Exception(“Camera not found! %s” % CAM_NAME) cam_item.setParam(‘Open’, 1) # Force the camera view to open BROCKER_URL=’192.168.1.50′ BROCKET_PORT=1883 MQTT_BASIC_TOPIC=’RoboDK/Station/s1/’ #———————————- # Settings PROCESS_COUNT = 300 # How many frames to process before exiting. -1 means indefinitely. client=mqtt.Client() client.on_connect=on_connect client.on_disconnect=on_disconnect client.on_publish=on_publish client.connect(BROCKER_URL,BROCKET_PORT,60) while count < PROCESS_COUNT or PROCESS_COUNT < 0: Green,Red,Yellow=False,False,False print(“=============================================”) print(“Processing image %i” % count) count += 1 #———————————————- # Get the image from RoboDK bytes_img = RDK.Cam2D_Snapshot(“”, cam_item) if bytes_img == b”: raise # Image from RoboDK are BGR, uchar, (h,w,3) nparr = np.frombuffer(bytes_img, np.uint8) img = cv2.imdecode(nparr, cv2.IMREAD_UNCHANGED) hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) mask_y = cv2.inRange(hsv, YELLOW_LOWER_BOUND, YELLOW_HIGHER_BOUND) mask_r = cv2.inRange(hsv, RED_LOWER_BOUND, REG_HIGHER_BOUND) mask_g = cv2.inRange(hsv, GREEN_LOWER_BOUND, GREEN_HIGHER_BOUND) # Find contours from the mask contours_y, hierarchy = cv2.findContours(mask_y.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) contours_r, hierarchy = cv2.findContours(mask_r.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) contours_g, hierarchy = cv2.findContours(mask_g.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) output = cv2.drawContours(img, contours_y,-1,(255,197,250),3) output = cv2.drawContours(img, contours_r,-1,(255,197,250),3) output = cv2.drawContours(img, contours_g,-1,(255,197,250),3) output = cv2.resize(output, (int(output.shape[1] * .3), int(output.shape[0] * .3))) if img is None or img.shape == (): raise key = cv2.waitKey(200) if key == 27: break # User pressed ESC, exit cv2.imshow(“Output”, output) client.publish(MQTT_BASIC_TOPIC+’Lamp/Yellow’,str(len(contours_y))) client.publish(MQTT_BASIC_TOPIC+’Lamp/Red’,str(len(contours_r))) client.publish(MQTT_BASIC_TOPIC+’Lamp/Green’,str(len(contours_g))) if len(contours_y) >0: Yellow=True if len(contours_r) >0: Red=True if len(contours_g) >0: Green=True cv2.waitKey(500) cv2.destroyAllWindows() |
Install Broker
Raspberryの便利Link
Brokerインストール
もしConnectionが拒否されたら
TwinCAT Side
Reference Link
以下のLinkでTwinCATからMQTTを操作する記事があります。
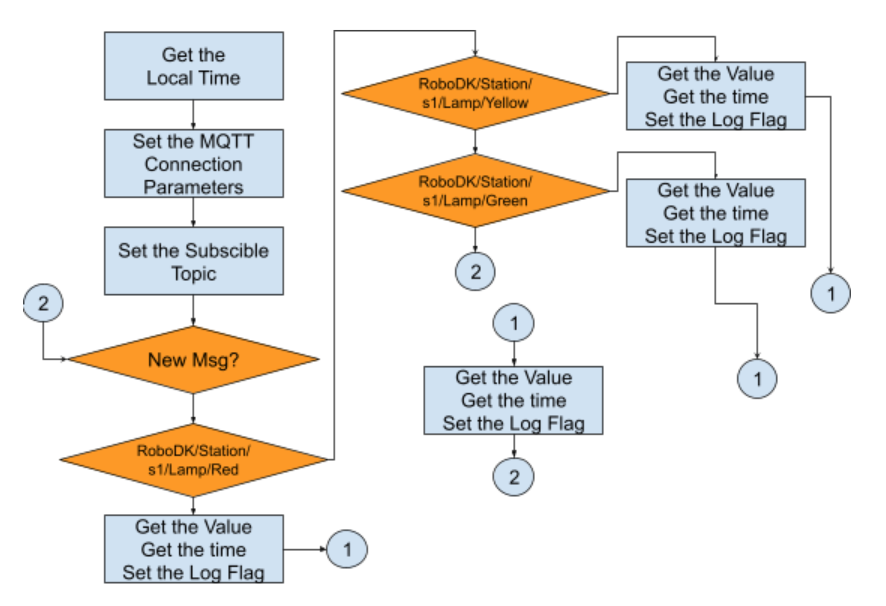
WorkFlow
TwinCAT側ではすごくシンプルです。
Local Timeを取ります>MQTT Connectionパラメタ設定>TopicをSubscribeする>新しいMessageがくる>そのMessageのTopicを判断する>Loggingする
のような流れです。
Program
DUT_Log
Data loggingのDUTです。StringはTimestampで、StatusはLEDの状態です。
| TYPE DUT_Log : STRUCT timeStamp:STRING; Status :DINT; END_STRUCT END_TYPE |
GVL_Logger
DUT_Logの配列をGVLで定義します。
| VAR_GLOBAL Red,Green,Yellow:ARRAY[0..99]OF DUT_Log; END_VAR |
Function Block FB_GetLocalTime
次はTwinCATからLocalTimwを取ります。
下記のLinkでTwinCATからLocal-Timeを取る方法を書いてます。
VAR_INPUT
True=Local Time取得開始
| VAR_INPUT i_bEnable:BOOL:=TRUE; END_VAR |
VAR
内部使用する変数などです。
| VAR bTimeSyncError :BOOL; TimeStruct :TIMESTRUCT; InitTimeStruct :TIMESTRUCT; LocalSystemTime :FB_LocalSystemTime; dwCycle:INT:=1; TON:TON; END_VAR |
PROGRAM
プログラムはシンプルで周期FB_LocalSystemTime() を呼び出し常にエラーあるかどうかをCheckするだけです。
| LocalSystemTime( bEnable:=i_bEnable ,dwCycle:=1 ); TON( IN:=NOT LocalSystemTime.bValid ,PT:=INT_TO_TIME( (dwCycle+ciTimeValidCheckOffset)*1000 ) ); TimeStruct:=LocalSystemTime.systemTime; IF TON.Q THEN bTimeSyncError:=TRUE; END_IF |
METHOD Init : BOOL
時間をリセットするMethodです。
| TimeStruct:=InitTimeStruct; |
METHOD Reset : BOOL
エラーをリセットするMethodです。
| bTimeSyncError:=FALSE; |
METHOD TimeInString : String
こちらは時間FormatをStringに変換し、CONCAT関数を使用し各部分を繋がります。
format:yy-mm-dd-hh:mm:ss
| VAR _string:STRING; END_VAR _string:=CONCAT(WORD_TO_STRING(TimeStruct.wYear),’-‘); _string:=CONCAT(_string,WORD_TO_STRING(Timestruct.wMonth)); _string:=CONCAT(_string,’-‘); _string:=CONCAT(_string,WORD_TO_STRING(Timestruct.wDay)); _string:=CONCAT(_string,’-‘); _string:=CONCAT(_string,WORD_TO_STRING(TimeStruct.wHour)); _string:=CONCAT(_string,’:’); _string:=CONCAT(_string,WORD_TO_STRING(TimeStruct.wMinute)); _string:=CONCAT(_string,’:’); _string:=CONCAT(_string,WORD_TO_STRING(TimeStruct.wSecond)); TimeInString:=_string; |
PROPERTY LocalTimeStruct : TIMESTRUCT
GET
現在時間のproperty です。
| LocalTimeStruct:=LocalSystemTime.systemTime; |
PROPERTY LocalTimeValid : Bool
GET
現在時間が有効かどうかを確認できるproperty です。
| LocalTimeValid:=LocalSystemTime.bValid; |
PROPERTY TimeSyncError : Bool
GET
現在Function Blockがエラーであるかどうか確認できるpropertyです。
| TimeSyncError:=bTimeSyncError; |
FUNCTION_BLOCK FB_Logger
LED Towerの状態を記録するFunction Blockです。
0=Off、1=On.
VAR_INPUT
| VAR_INPUT i_TimeStamp:STRING; i_Value :DINT; END_VAR |
VAR_IN_OUT
| VAR_IN_OUT io_logData:ARRAY[*]OF DUT_Log; END_VAR |
VAR
| VAR index:INT:=0; END_VAR |
METHOD ClearLog : BOOL
LogをクリアするMethodです。
VAR_INPUT
| VAR_INPUT bStart:BOOL; END_VAR |
VAR_INST
| VAR_INST R_TRIG:R_TRIG; END_VAR |
VAR
| VAR i:DINT; END_VAR |
PRGORAM
| R_TRIG(CLK:=bStart); IF R_TRIG.Q THEN FOR i:=ArrayLower TO ArrayHigher DO io_logData[i].Status:=0; io_logData[i].timeStamp:=’ ‘; END_FOR END_IF |
METHOD datalog : BOOL
状態を保存とシフトするMethodです。0番目は常に最新Logです。
VAR_INPUT
| VAR_INPUT bStart:BOOL; END_VAR |
VAR_INST
| VAR_INST R_TRIG:R_TRIG; END_VAR |
VAR
| VAR i:DINT:=0; END_VAR |
PROGRAM
こちらのプログラムは自動でDUTのサイズとシフトするByte数を計算します。その結果は次はのMEMCPY のパラメタnになります。MEMCPYはつまりMemory Copyそのもので、三菱のBMOVEのような関数です。
0番目は常に最新Logです。
| datalog:=FALSE; R_TRIG(CLK:=bStart); IF R_TRIG.Q THEN MEMCPY( destAddr:=ADR(io_logData[1]) ,srcAddr:=ADR(io_logData[0]) ,n:=SIZEOF(io_logData[0])*ArrayHigher ); io_logData[0].Status:=i_Value; io_logData[0].timeStamp:=i_TimeStamp; datalog:=TRUE; END_IF |
PROPERTY ArrayHigher : DINT
配列のUpperを取得するproperty です。
GET
| ArrayHigher:=UPPER_BOUND(io_logData,1); |
PROPERTY ArrayLower : DINT
配列のLowerを取得するproperty です。
GET
| ArrayLower:=LOWER_BOUND(io_logData,1); |
MAIN
VAR
| PROGRAM MAIN VAR MQTTClient:FB_IotMqttClient; payload:STRING(255); payload_r,payload_y,payload_g:STRING(20); fbMessageQueue : FB_IotMqttMessageQueue; fbMessage : FB_IotMqttMessage; sTopic :STRING; bSetNullTermination :BOOL; bScbscribed:BOOL; sTopicReceived:STRING(255); Value_r,Value_g,Value_y:DINT; GetLocalTime:FB_GetLocalTime; stTimeInString:STRING; datalog_r,datalog_g,datalog_y:FB_Logger; LastTimeStamp_r,LastTimeStamp_g,LastTimeStamp_y:STRING; i1,i2:DINT; bTest:BOOL; binit:BOOL; logTrigger_r,logTrigger_g,logTrigger_y:BOOL; hmi_LP_r,hmi_LP_g,hmi_LP_y:BOOL; END_VAR |
PROGRAM
| //Get Local Time GetLocalTime( i_bEnable:=TRUE ); IF GetLocalTime.LocalTimeValid THEN stTimeInString:=GetLocalTime.TimeInString(); END_IF; //init IF binit THEN LastTimeStamp_r:=stTimeInString; LastTimeStamp_g:=stTimeInString; LastTimeStamp_y:=stTimeInString; binit:=FALSE; END_IF //MQTT Client Setup //Parameters MQTTClient.sHostName:=’192.168.1.50′; MQTTClient.nKeepAlive:=60; MQTTClient.ipMessageQueue:=fbMessageQueue; //Execute() must always Run MQTTClient.Execute(bConnect:=TRUE); //Subscribe Topic sTopic:=’RoboDK/Station/s1/#’; IF MQTTClient.bConnected THEN IF NOT bScbscribed THEN MQTTClient.Subscribe( sTopic:=sTopic ,eQoS:=0 ); bScbscribed:=TRUE; END_IF END_IF //Check Message From Broker IF fbMessageQueue.nQueuedMessages > 0 THEN IF fbMessageQueue.Dequeue(fbMessage:=fbMessage) THEN //Get the Topic fbMessage.GetTopic(pTopic:=ADR(sTopicReceived), nTopicSize:=SIZEOF(sTopicReceived)); //Compare IF fbMessage.CompareTopic(sTopic:=’RoboDK/Station/s1/Lamp/Red’) THEN payload_r:=’ ‘; fbMessage.GetPayload(pPayload:=ADR(payload_r), nPayloadSize:=SIZEOF(payload_r), bSetNullTermination:=FALSE); LastTimeStamp_r:=GetLocalTime.TimeInString(); logTrigger_r:=TRUE; ELSIF fbMessage.CompareTopic(sTopic:=’RoboDK/Station/s1/Lamp/Yellow’) THEN payload_y:=’ ‘; fbMessage.GetPayload(pPayload:=ADR(payload_y), nPayloadSize:=SIZEOF(payload_y), bSetNullTermination:=FALSE); LastTimeStamp_y:=GetLocalTime.TimeInString(); logTrigger_y:=TRUE; ELSIF fbMessage.CompareTopic(sTopic:=’RoboDK/Station/s1/Lamp/Green’) THEN payload_g:=’ ‘; fbMessage.GetPayload(pPayload:=ADR(payload_g), nPayloadSize:=SIZEOF(payload_g), bSetNullTermination:=FALSE); LastTimeStamp_g:=GetLocalTime.TimeInString(); logTrigger_g:=TRUE; END_IF END_IF END_IF //Convert the Value from String to Numbers Value_r:=STRING_TO_DINT(payload_r); Value_g:=STRING_TO_DINT(payload_g); Value_y:=STRING_TO_DINT(payload_y); //Hmi hmi_LP_r:=Value_r =1; hmi_LP_g:=Value_g =1; hmi_LP_y:=Value_y =1; //Data logger //Green Lamp datalog_g( i_TimeStamp:=stTimeInString ,i_Value:=Value_g ,io_logData:=GVL_Logger.Green ); IF datalog_g.datalog(bStart:=logTrigger_g) THEN logTrigger_g:=FALSE; END_IF //Yellow Lamp datalog_y( i_TimeStamp:=stTimeInString ,i_Value:=Value_y ,io_logData:=GVL_Logger.Yellow ); IF datalog_y.datalog(bStart:=logTrigger_y) THEN logTrigger_y:=FALSE; END_IF //Red Lamp datalog_r( i_TimeStamp:=stTimeInString ,i_Value:=Value_r ,io_logData:=GVL_Logger.Red ); IF datalog_r.datalog(bStart:=logTrigger_r) THEN logTrigger_r:=FALSE; END_IF |
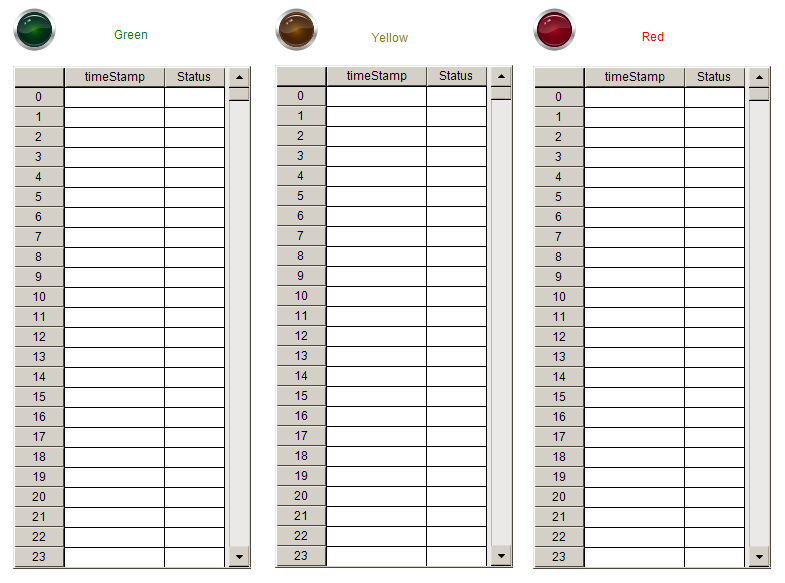
Visulization
この画面ではBeckhoffのTE1800使用しLogとLED現在状態を表示できます。
M5Core2 Side
最後はM5Core2側ですね。以下のLinkでM5StackとW5500 Lan ModuleでMQTT通信実装するTutorialを書いています。
Code
こちらのSample CodeがM5StackとW5500 LanモジュールでMQTT Topic Subscribeし、RoboDK StationのLED Townerと同じ状態が表示されるようにします。
| #include <M5Core2.h> #include <SPI.h> #include <Ethernet2.h> #include <PubSubClient.h> #define SCK 18 #define MISO 19 #define MOSI 23 #define CS 26 byte mac[] = { 0x90, 0xA2, 0xDA, 0x0F, 0x08, 0xE1 }; IPAddress Local(192, 168, 1, 211); EthernetClient ethClient; PubSubClient mqttClient(ethClient); //MQTT Broker const char *ENDPOINT=”192.168.001.050″; const int PORT=1883; char *MYID=”M5Stack”; char *PUBLISHTOPIC=”M5Stack/pub”; char *SUBTOPIC=”RoboDK/Station/s1/#”; // int GreenStatus=0; int RedStatus=0; int YellowStatus=0; // char *SubtopicYellow=”RoboDK/Station/s1/Lamp/Yellow”; char *SubtopicGreen=”RoboDK/Station/s1/Lamp/Green”; char *SubtopicRed=”RoboDK/Station/s1/Lamp/Red”; void callback(char* topic, byte* payload, unsigned int length) { Serial.print(“Message arrived [“); Serial.print(topic); int result_yellow=strcmp(topic,SubtopicYellow); int result_red=strcmp(topic,SubtopicRed); int result_green=strcmp(topic,SubtopicGreen); if (result_yellow ==0 ){ Serial.print(payload[0]); if (payload[0]==48){ YellowStatus=0; Serial.print(YellowStatus); } if (payload[0]==49){ YellowStatus=1; Serial.print(YellowStatus); } } if (result_red ==0 ){ Serial.print(payload[0]); if (payload[0]==48){ RedStatus=0; } if (payload[0]==49){ RedStatus=1; } } if (result_green ==0 ){ Serial.print(payload[0]); if (payload[0]==48){ GreenStatus=0; } if (payload[0]==49){ GreenStatus=1; } } Serial.print(“] “); for (int i = 0; i < length; i++) { Serial.print((char)payload[i]); } } void setup(){ //If LAN Modules is used,Please use this operation mode M5.begin(true, true, true, false, kMBusModeInput); Serial2.begin(115200, SERIAL_8N1, 13, 14); // START M5.Lcd.fillScreen(BLACK); M5.Lcd.setCursor(10, 10); M5.Lcd.setTextColor(WHITE); M5.Lcd.setTextSize(3); M5.Lcd.printf(“Inited..\n”); M5.Lcd.printf(“IP:192.168.1.211\n”); M5.Lcd.printf(“Mac:90-A2-DA-x0F-08-E1\n”); mqttClient.setServer(ENDPOINT, PORT); mqttClient.setCallback(callback); SPI.begin(18, 19, 23, -1); Ethernet.init(26); Ethernet.begin(mac, Local); connectMQTT(); } void mqttLoop() { if (!mqttClient.connected()) { connectMQTT(); } mqttClient.loop(); } void connectMQTT() { while (!mqttClient.connected()) { Serial.print(“Connection Loop..”); if (mqttClient.connect(MYID)) { Serial.println(“Connected.”); int qos = 0; mqttClient.subscribe(SUBTOPIC, qos); Serial.println(“Subscribed.”); } else { Serial.print(“Failed. Error state=”); Serial.print(mqttClient.state()); // Wait 5 seconds before retrying delay(1000); } } } long messageSentAt = 0; int count = 0; char pubMessage[128]; int led,red,green,blue; int status=0; void loop() { mqttLoop(); long now = millis(); if (now – messageSentAt > 500) { M5.update(); M5.Lcd.fillScreen(BLACK); if (YellowStatus ==1){ M5.Lcd.fillCircle(160, 120, 30, YELLOW); } if (YellowStatus ==0){ M5.Lcd.drawCircle(160, 120, 30, YELLOW); } if (RedStatus ==1){ M5.Lcd.fillCircle(240, 120, 30, RED); } if (RedStatus ==0){ M5.Lcd.drawCircle(240, 120, 30, RED); } if (GreenStatus ==1){ M5.Lcd.fillCircle(80, 120, 30, GREEN); } if (GreenStatus ==0){ M5.Lcd.drawCircle(80, 120, 30, GREEN); } Serial.print(YellowStatus); messageSentAt = now; sprintf(pubMessage, “{\”count\”: %d}”, count++); Serial.print(“Publishing message to topic “); Serial.println(PUBLISHTOPIC); Serial.println(pubMessage); mqttClient.publish(PUBLISHTOPIC, pubMessage); Serial.println(“Published.”); } } |
Result
Result-M5Core2 Side
Source Code
下記のLinkから今回のProjectをダウンロードしてください。
ZipにはRoboDK Project・TwinCAT ProjectとM5Stackのソースコードあります。
https://github.com/soup01Threes/TwinCAT3/blob/main/Project_RoboDK_Color_Detector.zip