みなさんこんにちは。この記事ではRoboDK 2D Camera Interfaceの使い方やPythonからのControl方法について説明します。どうぞよろしくお願いします。
RoboDK Version:
Import Camera
まず新しいStationを作成し、RobotをImportします。
今回はUR5をします。

.
地球ICONをクリックします。

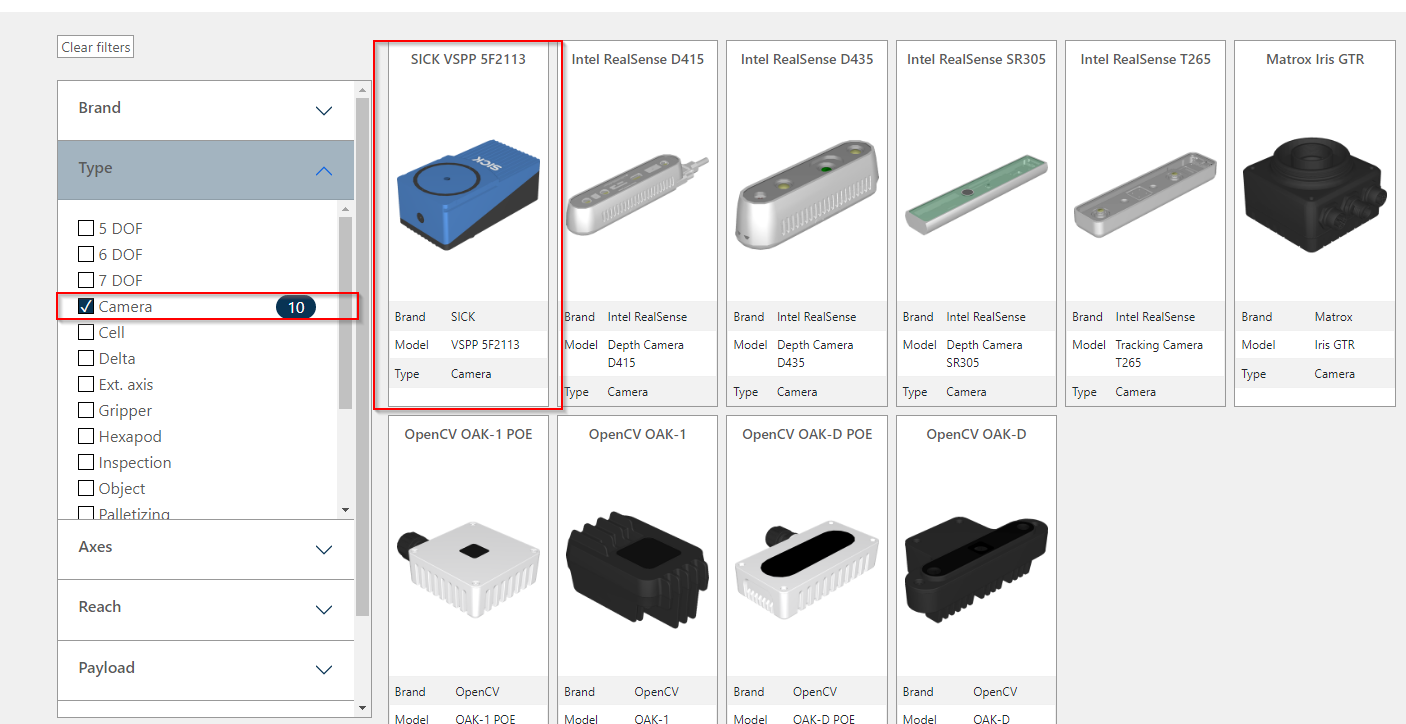
自動的にBrowserが起動され、RoboDK LibraryのWeb-pageに辿り着く。
左側でType>Cameraを選び、好きなカメラObjectをDownloadします。
Camera ObjectをStationにImportします。
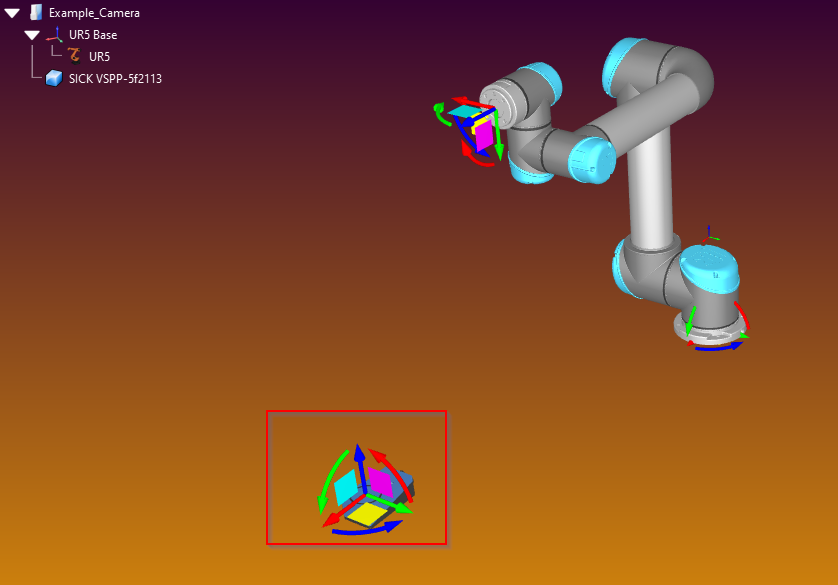
カメラ位置を調整します。

Connect to Camera Simulation Interface
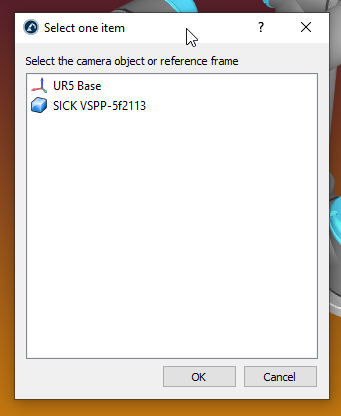
Connect>Simulate 2D Camera。
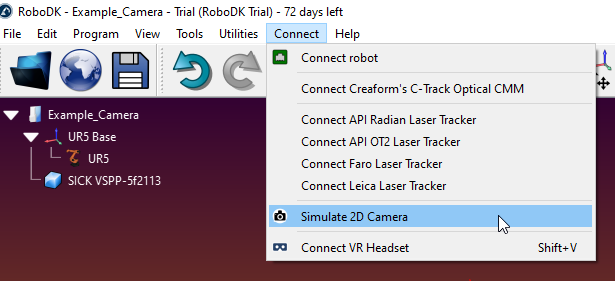
Popupが表示されています。
先のStepで追加したCamera Objectを選びます。
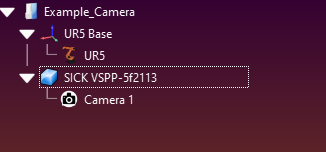
よし。カメラInterfaceがImportされました。
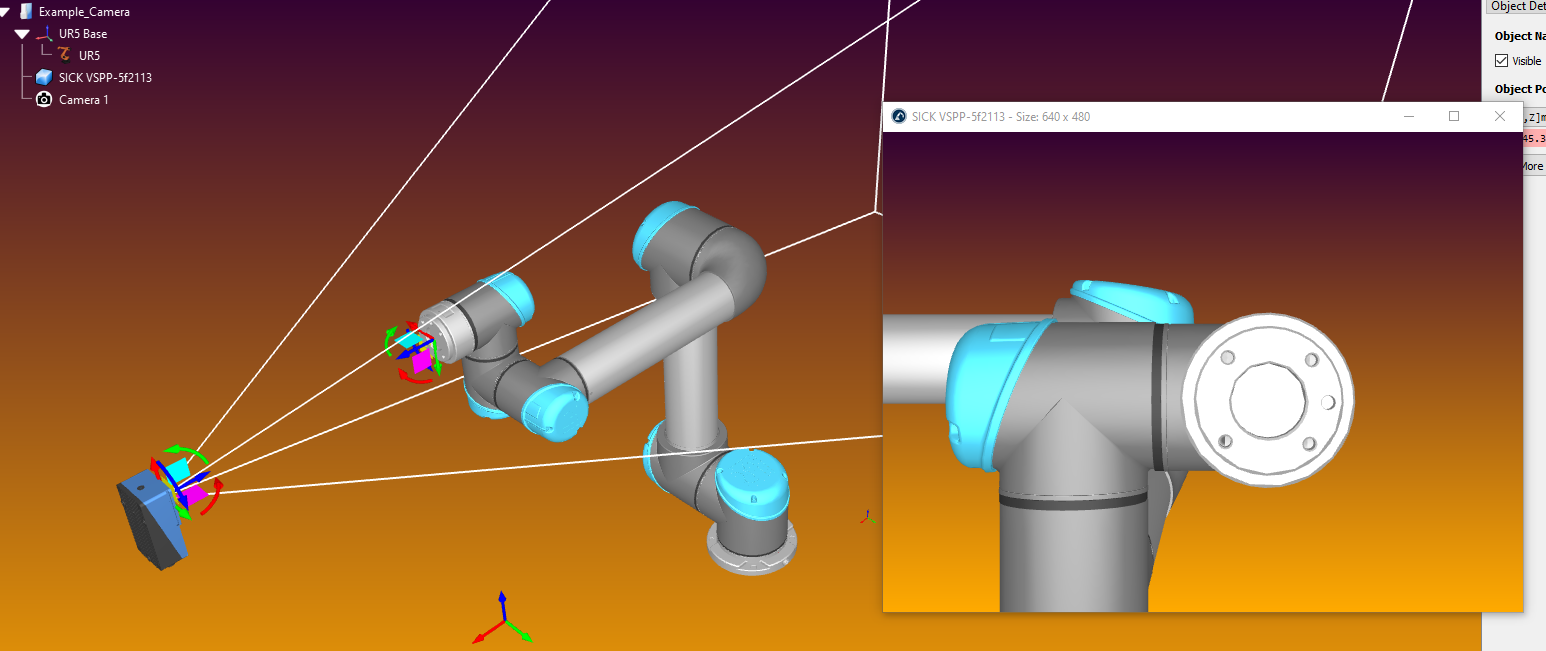
そのCamera InterfaceをCameraの中に入れてください。
ダブルクリックするとCamera Interfaceが有効になります。
Camera Settings
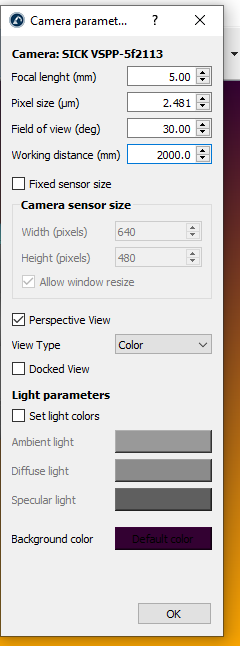
Camera右クリック>Camera Settingsでカメラパラメータを調整できます。
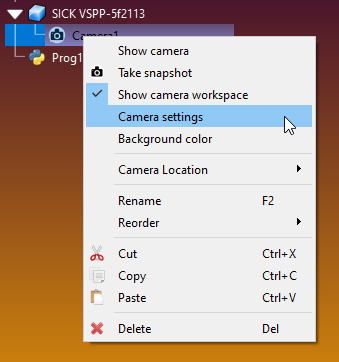
一般的なカメラパラメータも調整できます。
もちろんカメラInterfaceを有効にしながらリアルタイムでパラメータ反映できます。
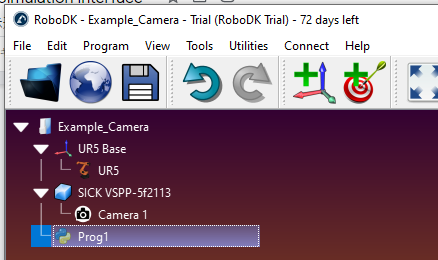
Control By Python
最後はPythonからの制御を説明します。
PythonのIconをクリックします。

Prog1 が追加されました。
右クリック>Edit Python Script。
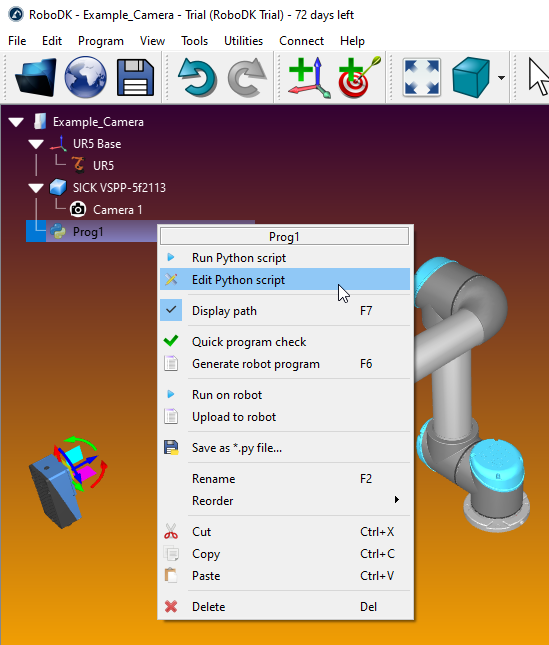
ここで自分の制御プログラムを作ることができます。

Code
以下は簡単なSampleでPythonからCamera Objectをもらい、写真を取る動作のScriptです。
| from robodk import robolink # RoboDK API from robodk import robomath # Robot toolbox RDK = robolink.Robolink() cam_item = RDK.Item(“Camera1”) if not cam_item.Valid(): print(‘No camera..’) quit() snapshot_file=’C:\FTPFiles\p1.jpg’ ret=RDK.Cam2D_Snapshot(snapshot_file,cam_item) |
Result
ダブルクリックでScriptを実行できます。
Source Code
以下のLinkからProjectをダウンロードしてください。
https://github.com/soup01Threes/RoboDK/blob/main/Example_Camera.rdk