まずRoboDK LibraryからCubeを追加してみましょう。それは今回のFrame説明するために使われています。

前回
Reference Frameなし
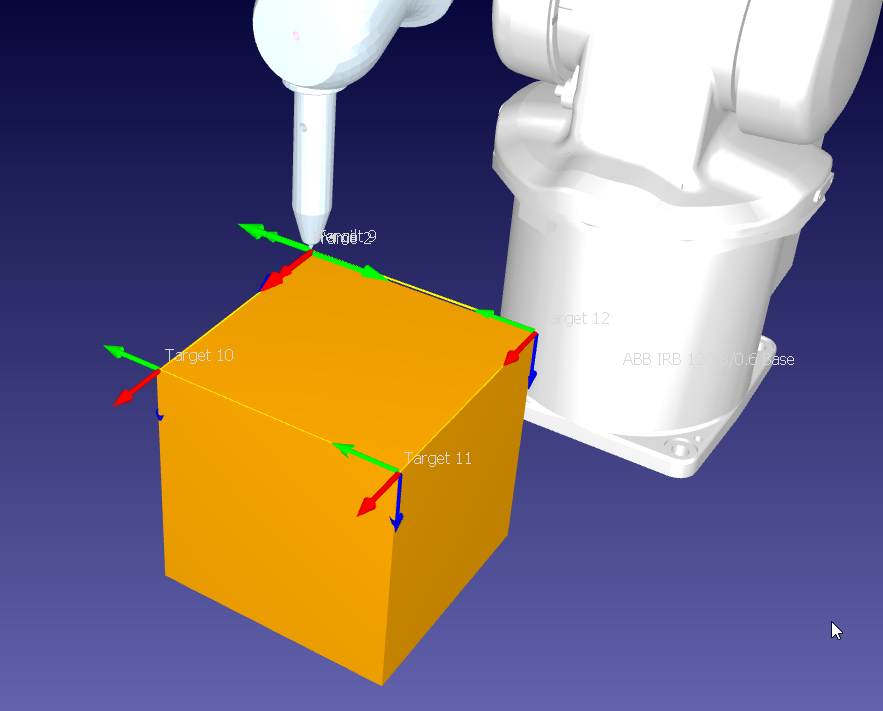
まずReferenceなしでそのまま4つのTargetを追加し、MoveLで四角形を書きます。

わかりやすくするため、Targetを名前をつけ直ししましょう。
(RobodkではDefault名 Target Xになりますので)
ではここでBox_Pointにしましょう。
では実際ロボットプログラムをRunすると問題はないようですね。
注意するのはいま4つのTargetにもBase(つまりStationのFrameからの座標になります。)
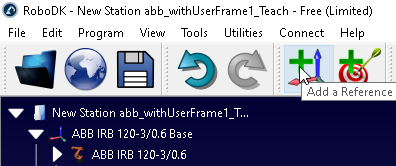
Reference Frame追加
今回Referenceを追加してみます。なぜReference Frameをするかというと、もしすべてのTargetはStationのFrameからになり、少しの変更でもあると、全てのTarget、Objectにも座標がずれてしまいます。
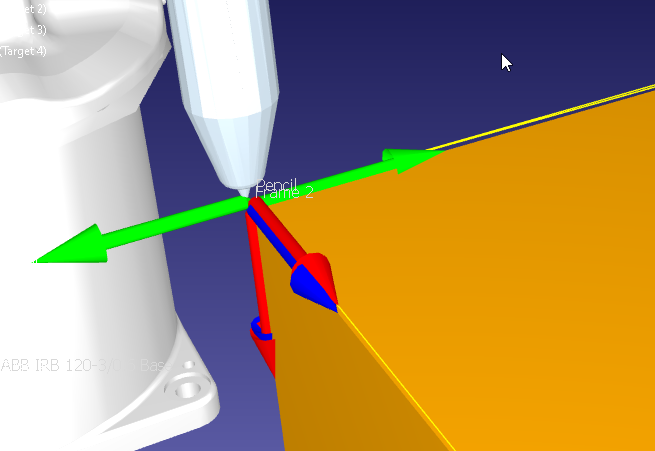
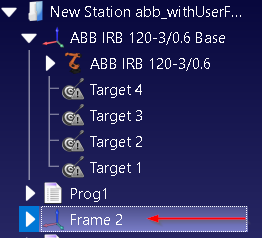
そしてそのReference FrameをBoxの角に設定します。
そして4つのTargetを設定し直します。
4つのTargetを選ぶ>右クリックし>Change support >Frameに選択します。

ロボットプログラムにもMoveLのTarget先に変更します。
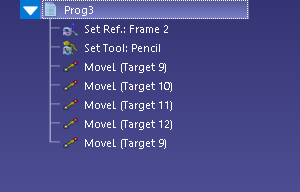
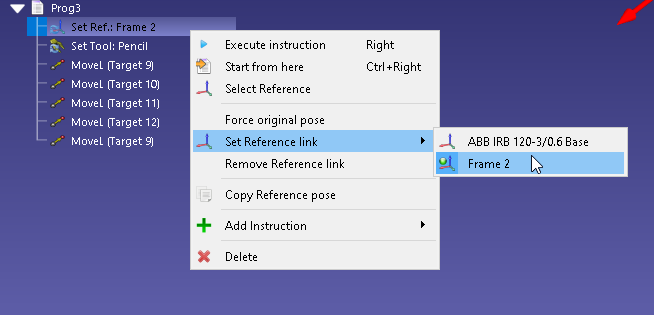
そして、みんなさんプログラムを追加するときにいつもSetTool・SetRefの2つの命令があると気が付きましたか?それはプログラムを実行する前ツールやFrameを選ぶんです。
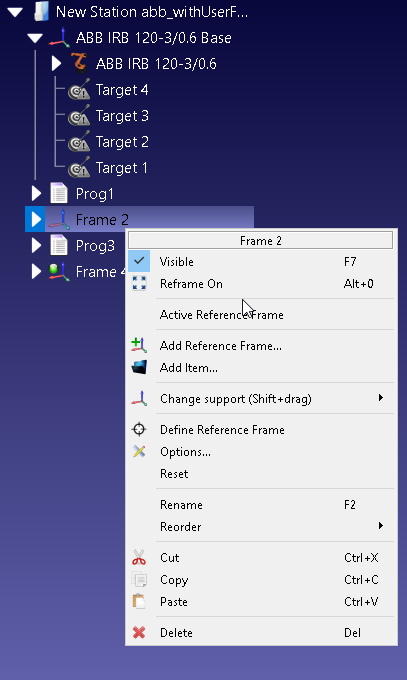
ではSet Ref:のところに右クリックしSet Reference link>Frame2にします。
Runかけてみたらちゃんと動きましたね。

ちなみに、最初にProgramのRef定義はRobotのBaseになります。

ADD BOX
最後にもう一つのSETのBOXを追加します。
Frame2に中にBoxとTargetがあると覚えてますか?
そのFrame2をCopyします。
Stationの下に貼り付けます。
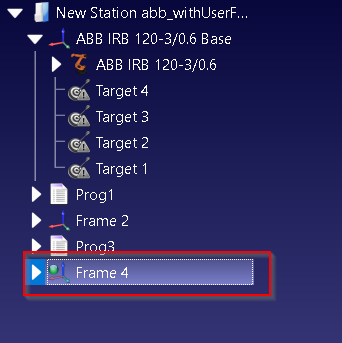
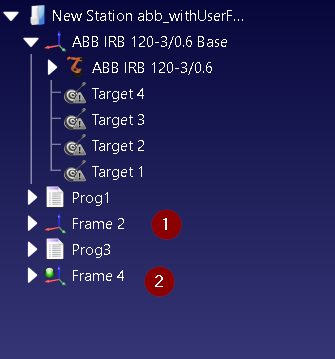
そしてFrame4のPositionを少し移動します。

こんな感覚になりますね。
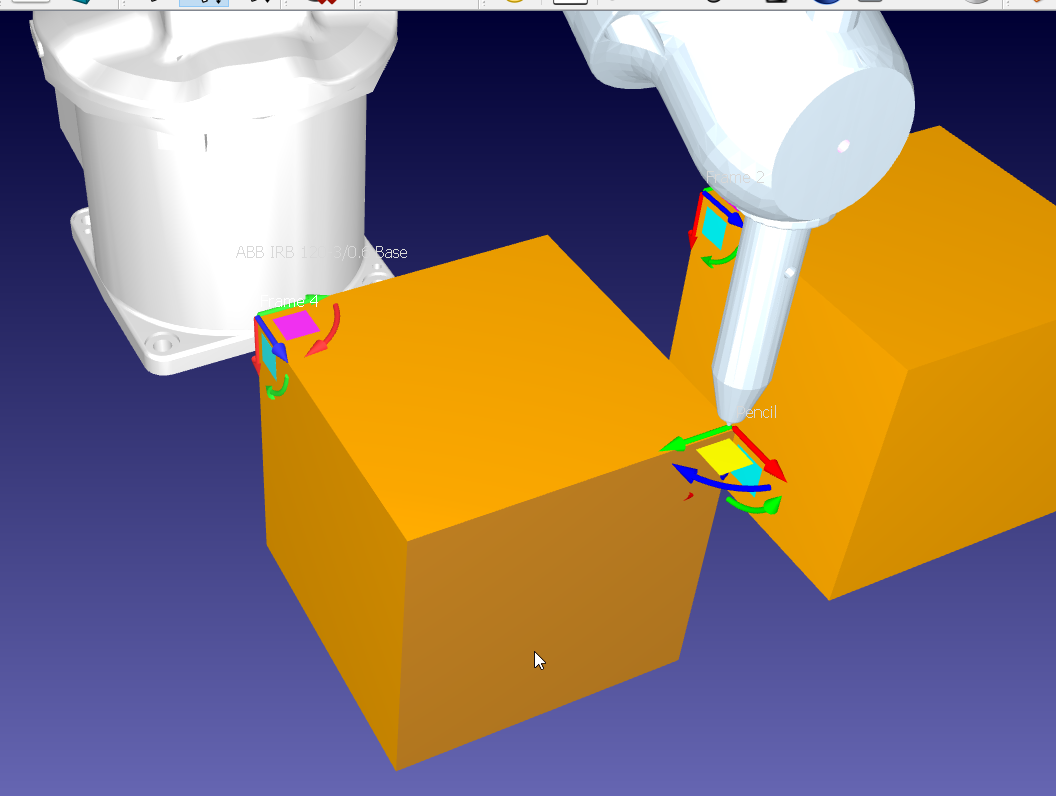
ここでFram4のICONに小さいな緑ボールICON見えますか?これはいまFrame4がActivateされてるだと示しています。
このようにFrameのところに右クリックしActivate Reference Frameすることで別のFrameを切り替えることが可能です。
このように、Frameを切り替えることだけで違うBOXを移動することができますね!