みんなさんこんにちわ。FANUC初心者勉強の6話になります。前回Partsの追加・設定・Worldの思想などを簡単に説明しました。次はTeachingなどの簡単操作を説明したいと思います。
FANUC 記事シリーズ
http://soup01.com/ja/category/%e3%83%ad%e3%83%9c%e3%83%83%e3%83%88/fanuc/
Teach Pendant
まずROBOGUIDEからTeach Pendantを出してみよう。
Tool barにTeach Pendantのアイコンをクリックします。
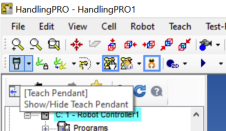
そうするとTeach Pendantが表示されます。
ですが、ときにそのWindowsは移動できる範囲が制限されます。
赤矢印のボタンをクリックします。

はみ出すことができるようになります。

Payload設定
Teach Pendantを起動したところ、Messageが見えますね。クリックしてみます。

Payload Configuration Not Completeのメッセージですね。
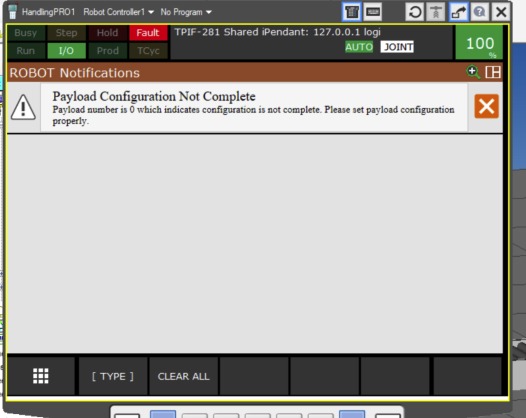
このメッセージをクリックします。

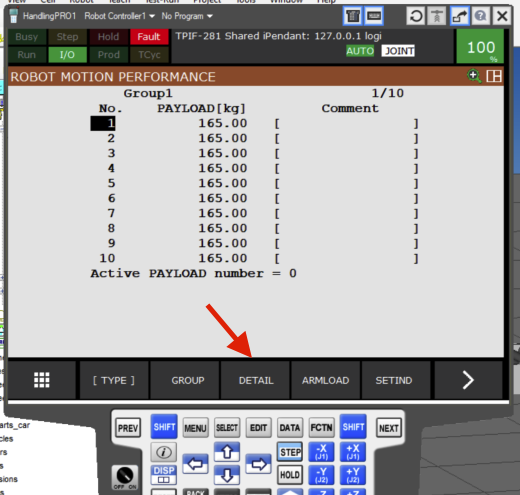
1番めのPayloadを登録します。
No.1を選び、下のDetailボタンをクリックします。
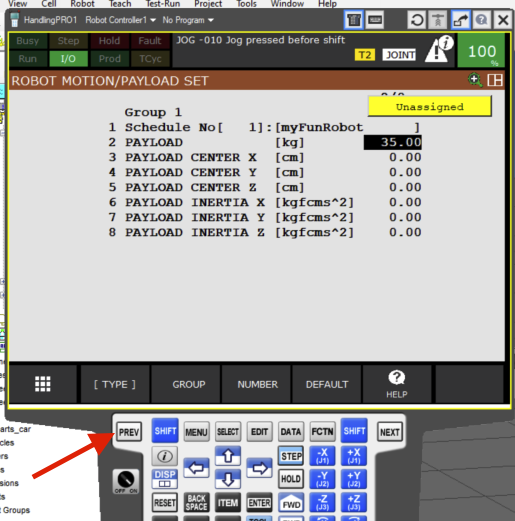
最初に1番めのSchedule No[1]:のとなり*****にPayloadの名前を決めます。

次は2番めのPayload[kg]に35Kgを入れます。
(確かにツール25Kg+Parts10Kgのはずです。)

ロボットの動き経路やCycleTimeが変わりますが、よろしいですか?と。
YESします。

これでOK。次はPREVで戻ります。
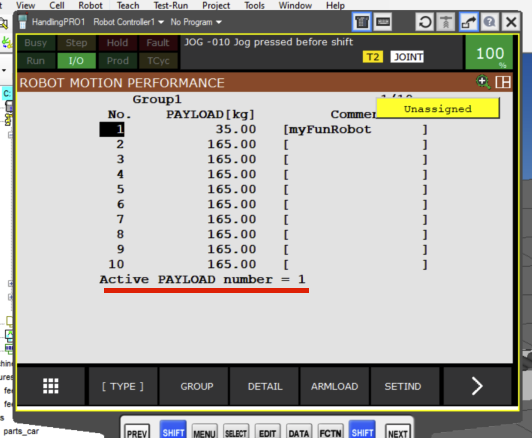
先設定したPayloadを適用します。
SETINDをクリックします。

Enter PAYLOAD Numberと言われました。1を入れてください。

Active PAYLOAD numberがいま1になります。
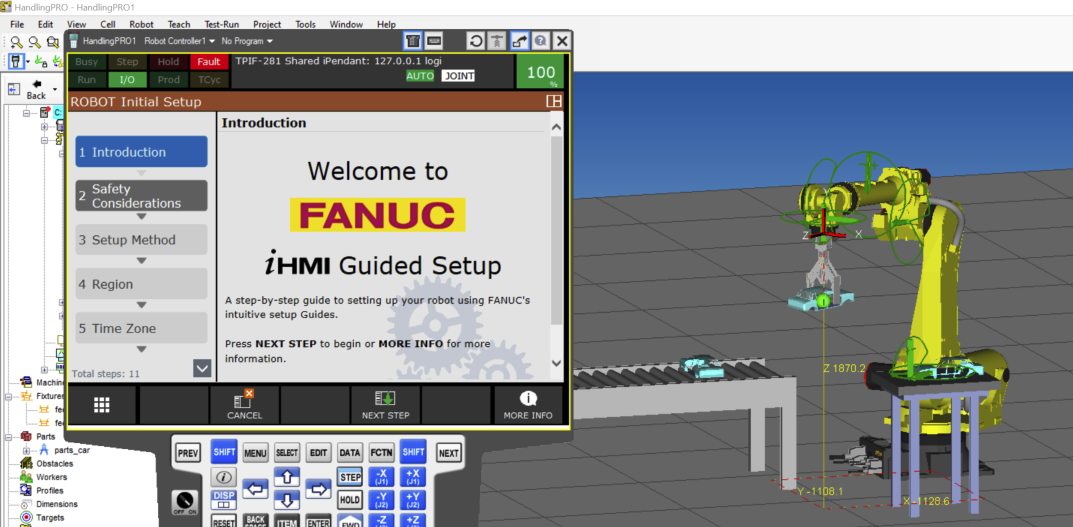
TPプログラム
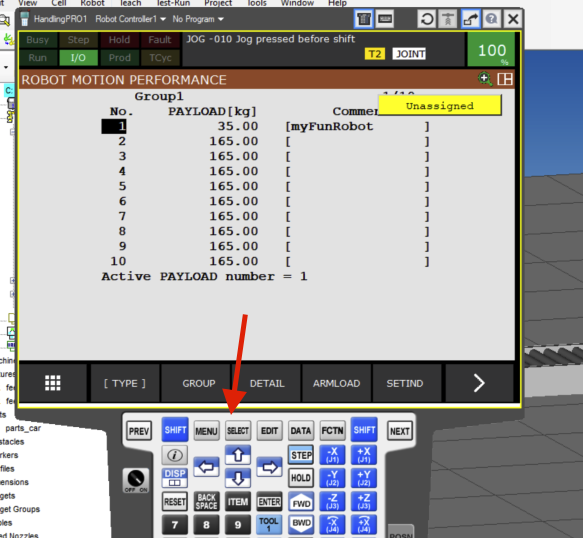
Payload設定したところで、Selectボタンを押し、次はTPプログラムを作成します。
ROBOT Selectの画面に変わりました。

左下にあるTYPEをクリックししTP Programsを開きます。
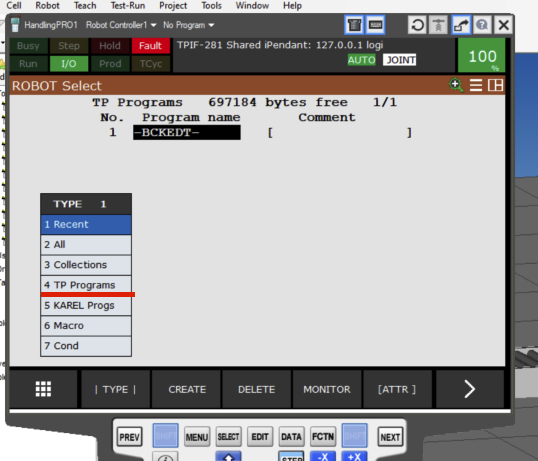
CREATEボタンをクリックします。

プログラム名を入力します。もしKeyboardうまく聞かない方なら右上にあるKeyboardをクリックし、画面が細い黄色枠つくようになってください。

Program名はMYPROGRAMにしました。
次はEDITでプログラムを追加します。

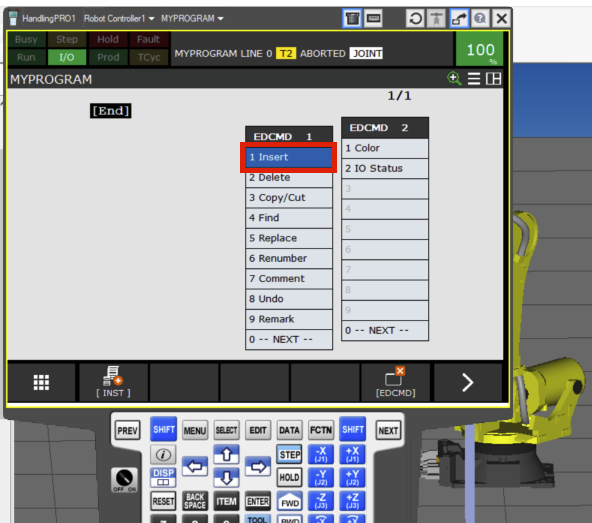
EDCMDボタンでコマンドを追加しましょう。

EDCMD 1>1 Insertをクリックします。
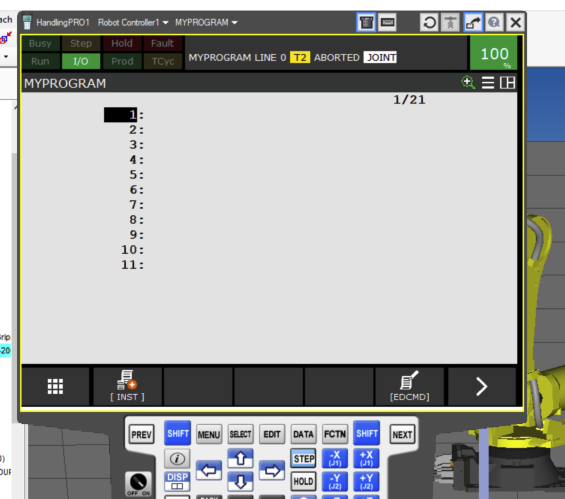
多分そんなにないですが、とりあえず20Lineを追加しましょう。

よし、これでOKです。
一つ画面ちょっと不便なのでDISPボタンで2画面分割します。
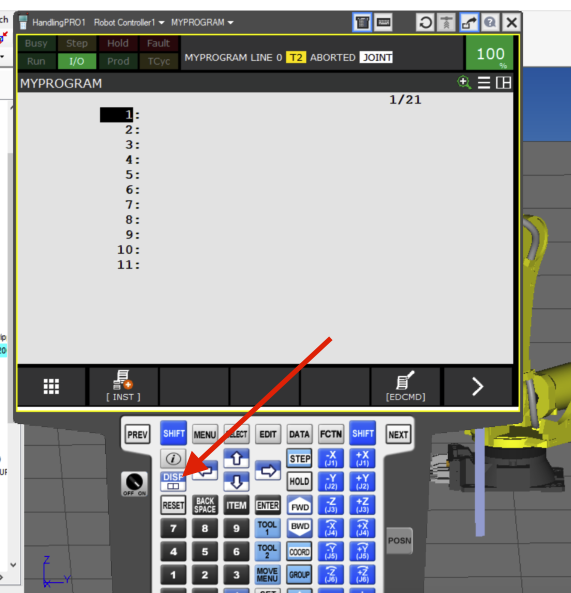
こっちのほうが見やすいです。

Data追加
TPプログラム追加されたところ、次はDataの追加になりますね。

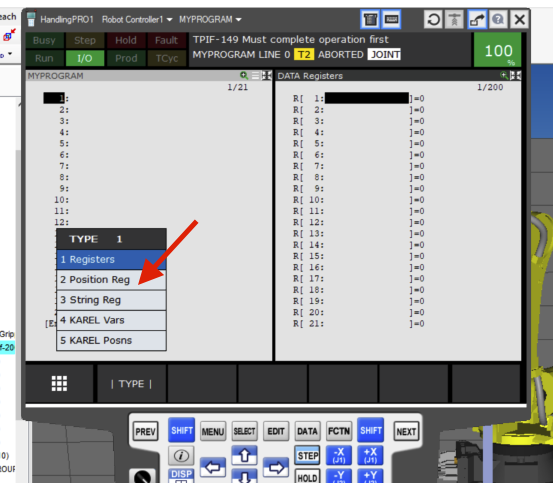
TYPE 1>2 Position Regをクリックします。
いくつのPositionを追加しましょう。
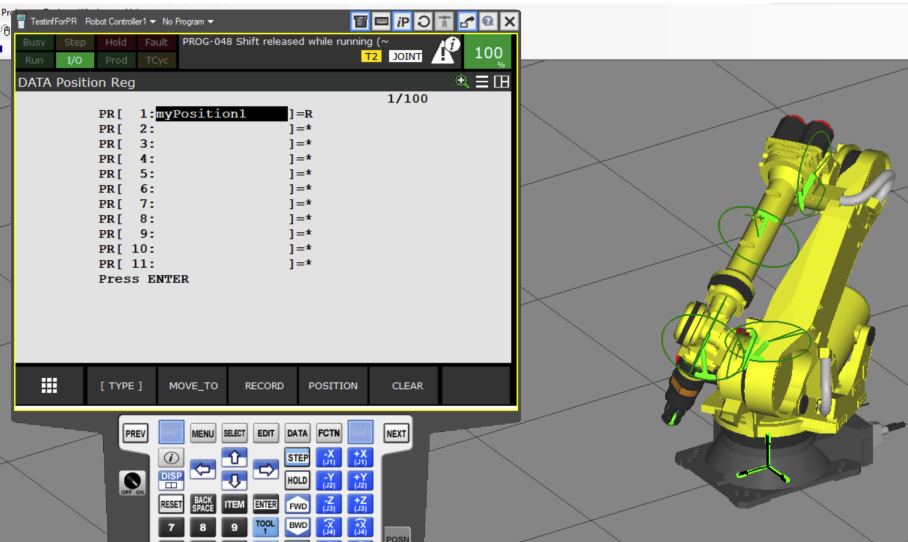
いま左がプログラム・右がPosition Reg(PR)になっていますね。
Position Regはなにかまた別の記事で説明しますね。
いまはHome・Pick・Place・Offset4つがあります。

該当するPRはどんな数字入ってるのか知りたらい、POSITIONをクリックすればよいです。

該当するPOSITIONのXYZなど見えます。
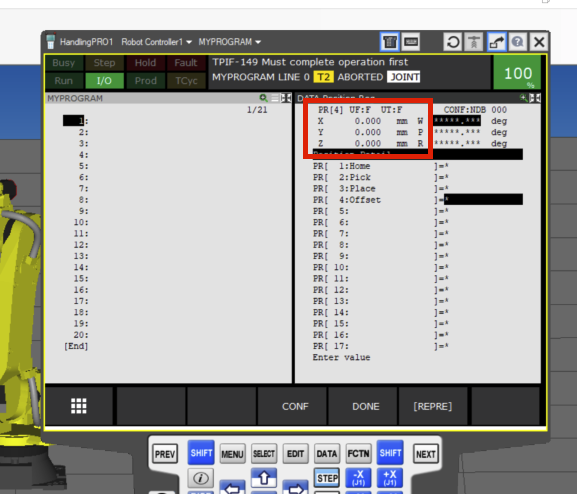
直接数字入れてもOKです。この例でTeach PendantでZを150mmを入力し、DONEを押せばOKです。
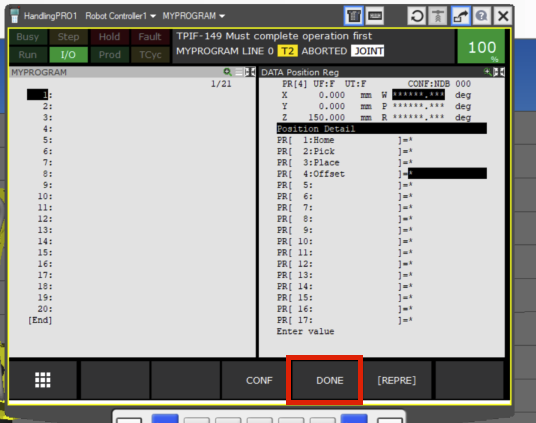
もちろん直接ロボット動かして適切なPositionに移動したら、
SHIFT+RECORDで記録するのも可能です。

RECORDされたPOSITIONにはRの文字がついています。

Pickup PositionをRecord
コンベヤのところにクリックします。
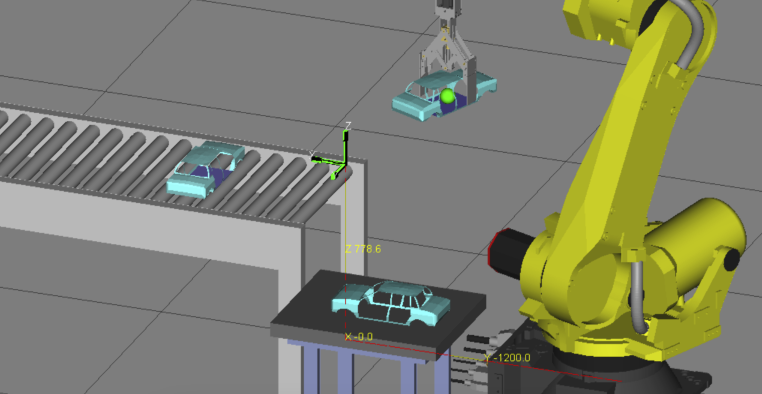
PartsのTabを開いてMoveToのボタンをクリックします。

ロボットが自動的にPickupの位置に移動します。
PickのPRを選び、SHIFT+RECORDで記録します。

Table PositionをRecord
一回楽な方法覚えたら、Tableの方にもダブルクリックし、PartsのTabを開きます。
MoveToのボタンをクリックします。

Placeの場所に移動してくれます。
同じくSHIFT+RECORDで記録します。

最後に
はーい、お疲れ様ーです。
このシリーズではFANUCのロボットとROBOGUIDEを使用について勉強用のメモになります。あくまでも個人的書いてたものなので、実際使うときには安全を注意し、経験あるエンジニアと一緒に作業してくださいね。