こちらのシリーズでは異なるメーカのCPUから違うProtoclでATV320U15M2Cを制御する方法を紹介します。よろしくおねがいします。
Part1のTaskでは:
- ATV320単体テスト
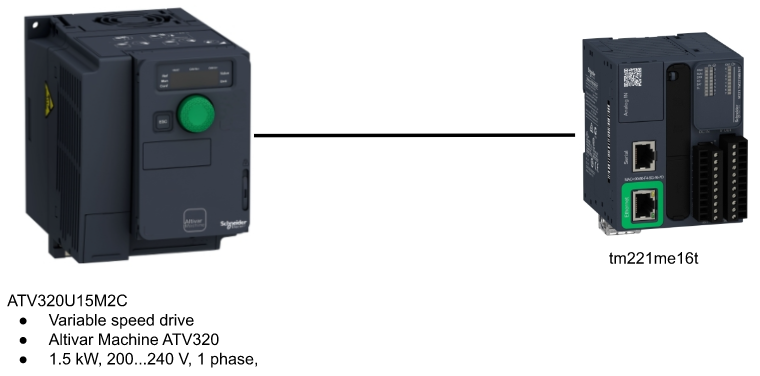
- TM221ME16T Schneider CPUを構築
- ATV320をTM221ME16TからI/Oで制御する
Implementation-1
Implementation1ではATV320だけでDI1/DI2/AI1を使用し単体テストを行います。
ATV320U15M2C
Altivar 320はSpeed driveで単相の電源供給から3相出力できるDriveであり、定格は1.5kW/2hp 200V to 240V ACになります。そしてATV320ではSchneider Electrical’s EcoStruxure Machineに100%統合でき、つまりSomachine やSomoveから簡単に設定・制御・診断が可能です。

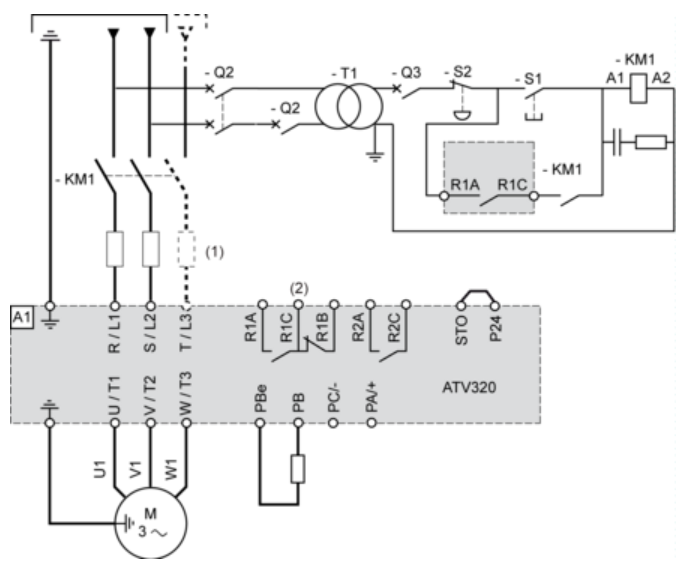
Connection Diagrams
こちらはManualから切り取ったATV320全体の配線図ですが、自分は100vから220vの昇圧機だけあり、あとモーターはつながっていません。
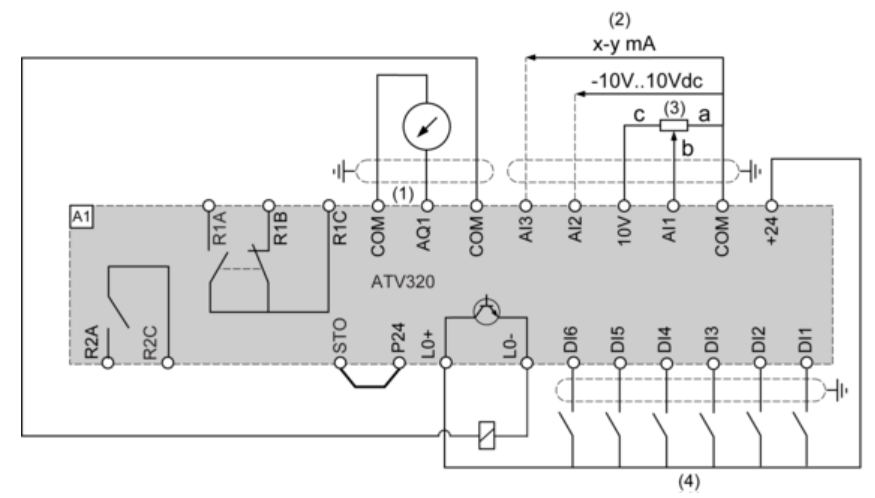
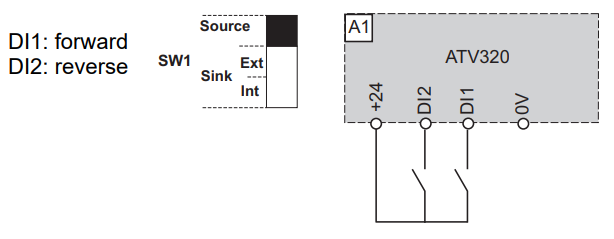
Control Connection Diagram in Source Mode
こちらはSource Modeの配線例です。
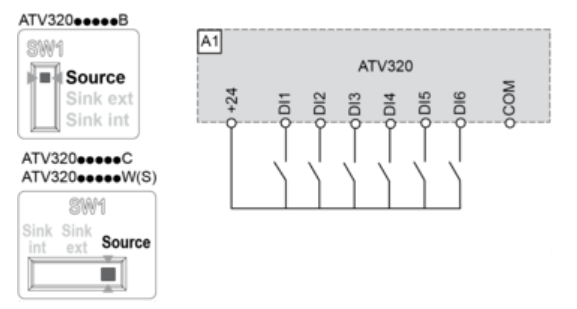
DI Wiring
ATV320U15M2C is used in my tutorial here is the Digital Input wiring with Source mode.
Commissioning
SchneiderのTM221 CPUと連携する前、Inverterが単体の動作確認は非常に大事です。
ATV320ではTerminal Boardがついており、ManualによるとDI1=正回転、DI2=逆回転、AI1=速度設定値になります。
DI1/DI2
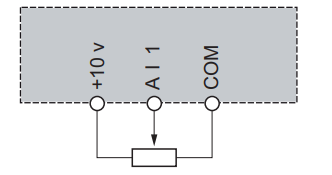
AI1
AI1で0- +10Vdc の2ms サンプリングタイムで取り込んでいます。
Important Parameters
ATV320の”GonF→FuLL→SiN(Simple Start)”Menuではいくつかの大事なパラメータを設定や確認する必要があります。
bFr(Standard motor frequence)
モーターの標準Frequency(Hz)、Factory Settingは50.0Hzです。
nPr(Rated motor Power)
The rated motor power on the motor nameplate in KW.
モーターの定格Power(Kw)。
un5(Rated motor Voltage)
モーターの定格電圧(V)。
nCr(Rated motor Current)
モーターの定格電流(A)。
Fr5(Rated motor freq)
モーターの定格Frequency)、Factory Settingは50.0Hzです。
nSP(Rated motor Speed)
モーターの定格速度(RPM)。
iTH(Motor thermal monitoring current)
モーターのthermal monitoring電流(A)。
ACC(Acceleration)
加速時間(s)
dEC(Deceleration)
減速時間(s)
LSP(Low Speed)
MotorのLow Frequency参照値、Factory setting=0.0。
HSP(High Speed)
MotorのMaximum Frequency参照値、Factory setting=50.0。
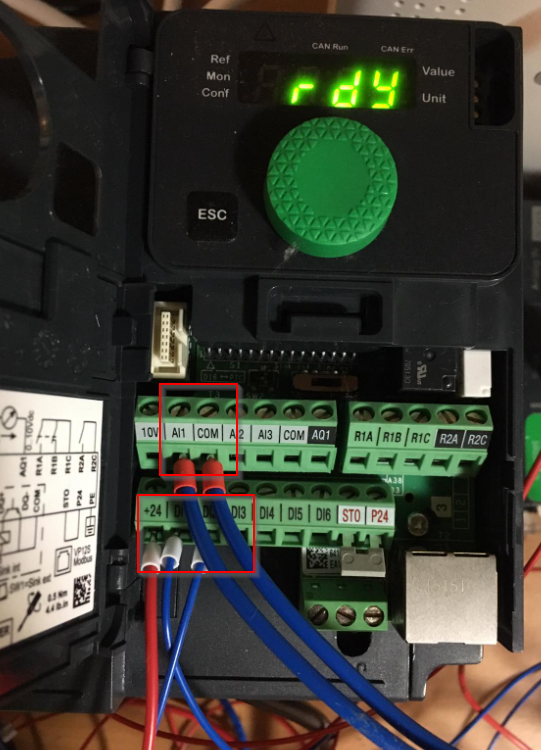
Terminal
こちらは今回の記事で使用する入力端子です。
Remove the Power Cover
こちらの動画からATV320の電源Coverを外す方法があります。
Factory Reset
Commissioningを始める前にFactory Resetするのがおすすめです。
ConF Menuを開きます。
FC5- Menuを開きます。

ALLに設定します。
GF5 Menuを開きます。
”YES”を設定しFactory Resetを行います。

Result
こちらの動画でDI1/DI2/AI1からATV320の単体テスト結果を確認できます。
Error?
最初にATV320を動かしてるとき”OPF2″というエラーが発生しました。Manualを調べると”OPF2″は 3 Motor Phase lossで、InverterがMotorと配線してないときや出力が低すぎるときに発生する警報になります。
記事にも書きましたが、今回はモーターと繋がりませんので、当然そのエラーが解消できなく、アラーム自体を無効にする必要があります。

また”ConF” Menuを開きます。

”FULL” Menuを開きます。

”FLE” Manualを開きます。

さらに”OPL” Menuを開きます。

そのパラメータを”nO”に変更すれば”OPF2″アラームが無効になります。
最後は電源を入れ直ししましょう。

Implementation-2
ATV320単体テストが問題なければ、次はSchneider CPUから実I/Oを制御してみます。
こちらの記事では Schneider tm221me16tとアナログモジュールTM3AM6Gを使用します。
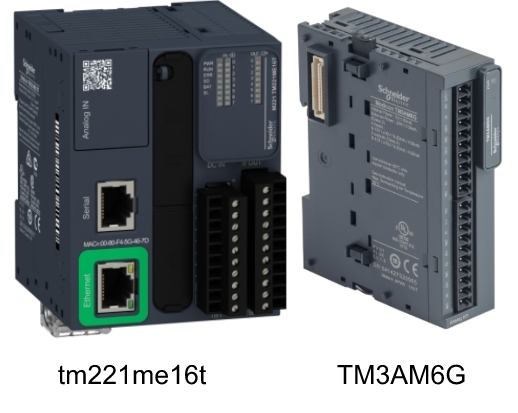
TM3AM6G Mixed I/O Module 4 Inputs/2 Outputs
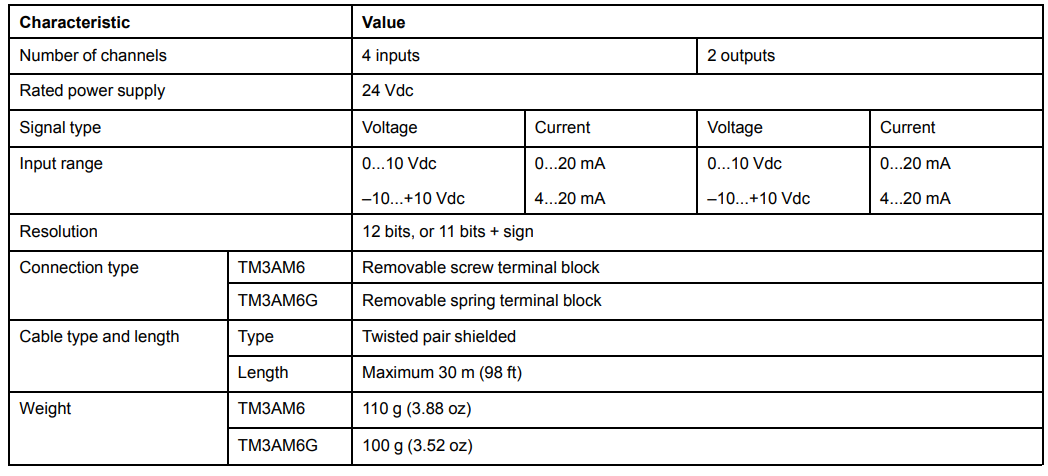
こちらのTM3AM6GモジュールではTM3 Modicon の1つでM221/M241/M251/M261 CPUの拡張モジュールとして働きます。TM3AM6Gは4 Inputsと2 Outputs with 11 Bit+sign ・12 bit input resolutionで、後は24V DC の外部電源が必要です。

Main Characteristic
Status LED
TM3AM6GモジュールにはPWR LEDがついており、モジュール自体の電源状態を示しています。
| LED | Color | Status | Description |
| PWR | Green | On | 電源供給してる |
| Green | Off | 電源供給していない |

Wiring
こちらはモジュールの配線になります。

Installation
Here is the video to show you how to install/uninstall the module to your Schneider CPU.
https://youtube.com/shorts/cFUjQG4Ynws
M221 Side
Reference Link
Hardware Configuration
EcoStruxure Machine Expert Basic を起動、新しいプロジェクトを作成し、Configuration Tabを開きます。

Add Modules
右側にある製品カタログからTM3 Analog I/O Modules Menuを展開>TM3AM6/Gを選択します。
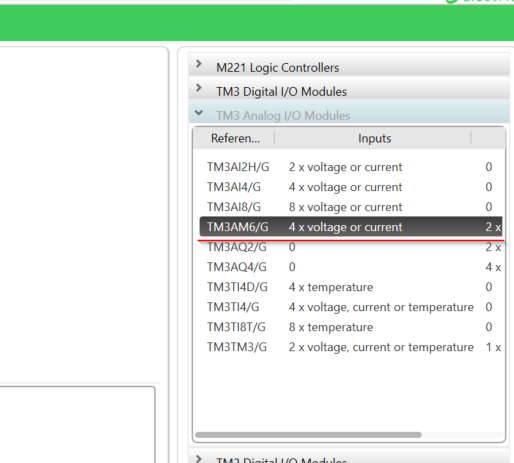
TM3AM6/GをHardware ConfigurationにDropします。
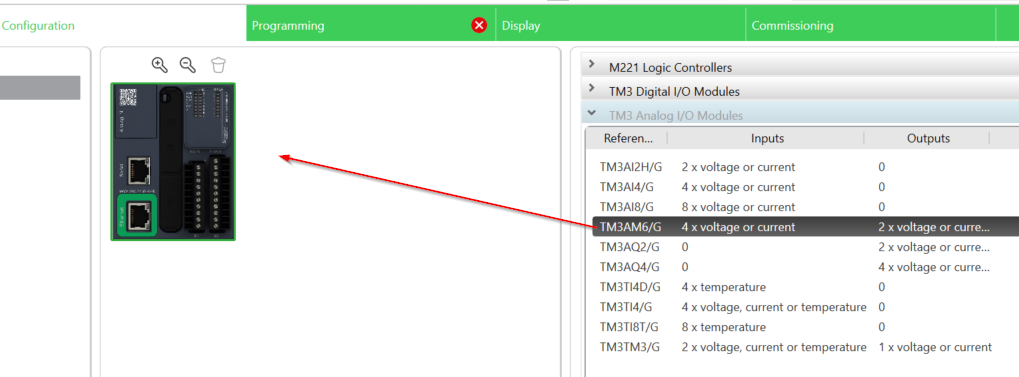
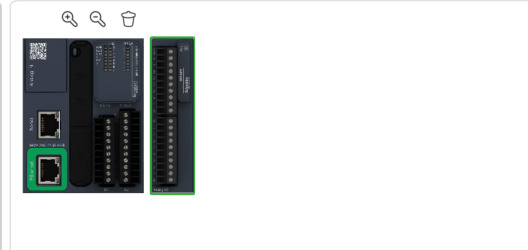
Done!TM3AM6GがHardware Configurationに追加されました。
Modules Configuration
次はTM3AM6Gの設定を行います。
Analog Inputs
IO Bus>Analog Inputsを展開するとAnalog Inputs の設定画面が表示されます。

Choose the measurement range, 0-10 V is used in my tutorial.
TypeのFieldから各アナログ入力チャンネルの測定範囲設定でき、今回の記事では0-10vにします。
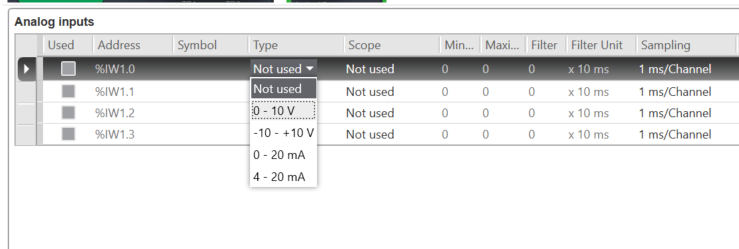
Symbol名の入力を忘れずに、Applyボタンで設定を保存します。

Ananlog Outputs
次は先ほどと同じ操作でアナログ出力の設定を行います。
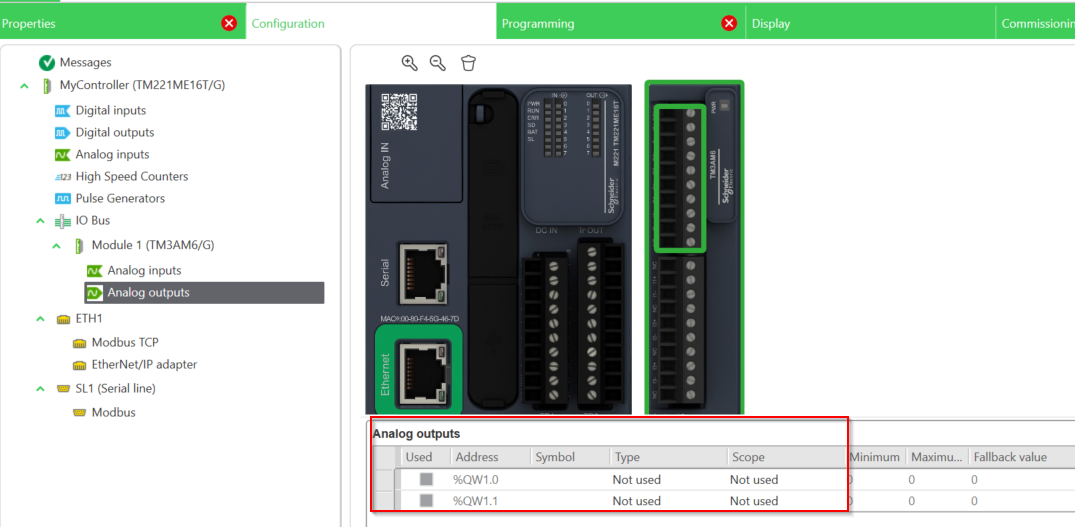
出力範囲とSymbol名を設定し>Applyで適用しましょう。

Program
ここから簡単なプログラムを作成します。
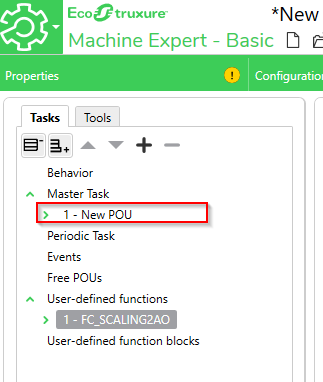
Add User-defined functions
最初にUser-defined functionを定義しAnalog 出力のコマンド値は範囲内かをCheckする関数を作成します。
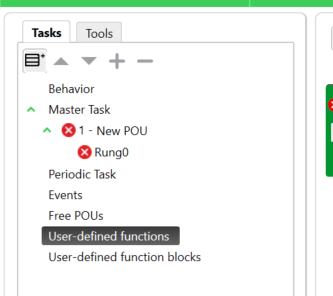
User-defined functions右クリックし>Add user-defined functionします。
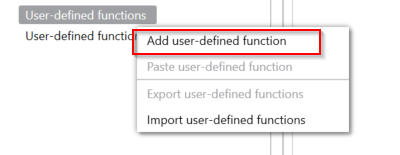
新しいFunctionが追加されました。

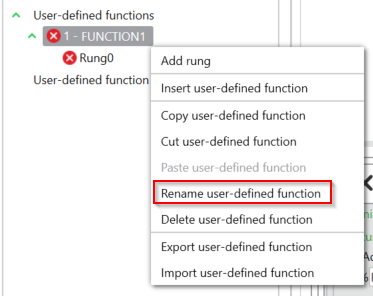
Rename it
新しく作成された関数を右クリック>Rename user-defined functionで関数名を変更しましょう。
Configure the Return Type
いまからFunctionのReturn値を設定します。このReturn値は関数の実行結果だとイメージしてください。
%RET0ではFunctionのReturn値になり、そのReturn値のデータタイプをWord(16Bit整数)・Double(32Bit整数)・Float(実機)とどちらかを設定できます。

Configure the Parameters
次は”Add a parameter or local variable”から関数のInputパラメターや関数内で使用するLocal変数を定義します。

変数がFunctionに追加されました。

もちろん、TypeのFieldから”Parameter”か”Variable”かを変更できます。
Parameter=Inputパラメータで、
Variable=Local変数になります。
今回の記事ではWord Typeのパラメータに設定します。

Program
次はFunctionをMain Programに呼び出します。最初にReturn Valueを格納してる変数%RET0を0にリセットし、もしInputパラメータ%PARAM0が範囲内であればその%PARAM0値を上書きします。
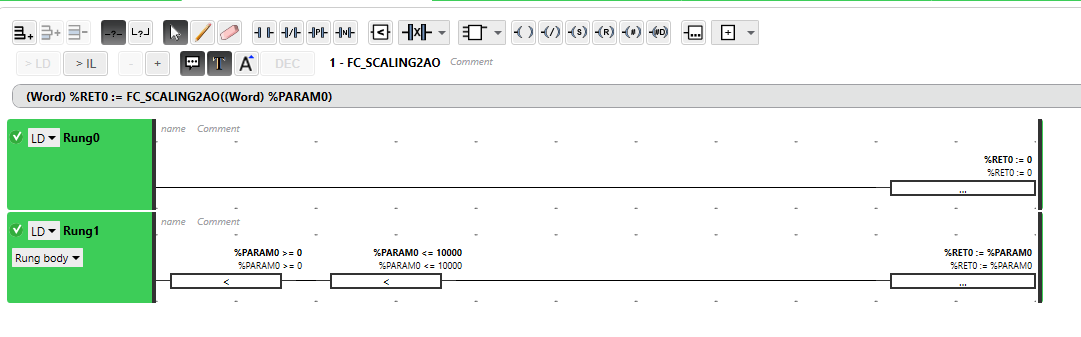
MAIN PROGRAM
次はMainプログラムを作成します。
Operation BlockをRungに追加します。
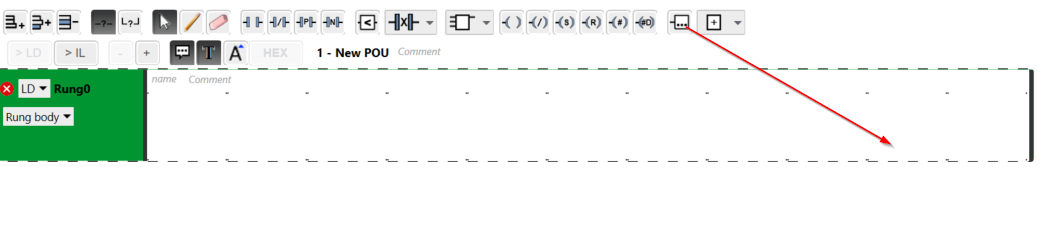
Operation Blockが追加されました。
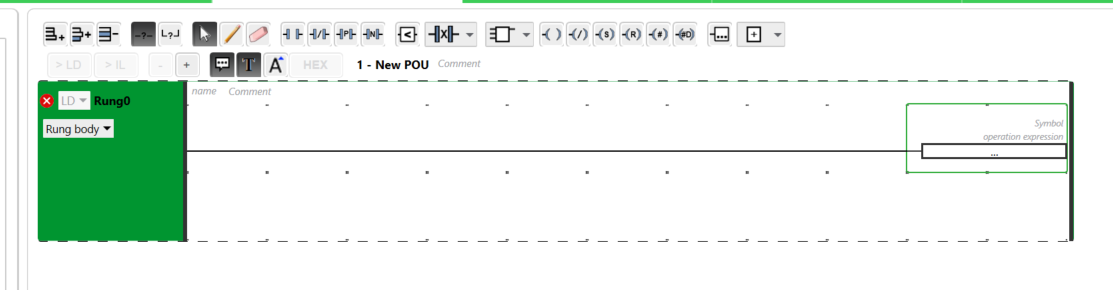
最後はOperation BlockのField欄でFunction名を入力しパラメータとReturn値を割り付ければOKです。
こちらは実際のプログラムで、Rung0とRung1は正回転のコマンドと逆回転のコマンドを同時に出力しないようにします。Rung2はUser-defined Functionを呼び出し、速度コマンドが範囲内かをCheckします。

Implementation-3
Implementation3ではATV320のDI1/DI2/AI1の3つの制御信号の出力をSchneider TM221ME16T CPUの出力に変わります。
AT320 Side
Di Wiring
ImplementationではSchneider CPUの出力から制御しますので、デジタル入力のDI1/DI2は外部電源の配線に変わります。

Result
こちらのLinkから実際のでOperation状態を確認できます。
Source Project
こちらのLinkからプロジェクトをDownloadできます。
https://github.com/soup01Threes/Schneider/blob/main/State1_TestingwithATV320.smbp