今回の記事はROSのDobot CR5 Simulation環境の作成手順になります。Githubの手順通りやってもうまく行かなかったので、構築するとき発生したエラーと解決方法も一緒にメモしました。
さ、始めよう!

Thanks!
株式会社フレアオリジナル
この記事ができあがったのは株式会社フレアオリジナルがDOBOT貸してくださったおかけです。本当にありがとうございます。フレアオリジナルは長野県にあるエンジニアリング会社で、協働ロボットDOBOTとDH-ROBOTICSの正規代理店です。
株式会社フレアオリジナルさまは様々な分野で事業を展開しております。
- 産業用・協働ロボットシステムの設計・製造・構想、設計、制作・導入・運用保守
- ロボット特別教育
- ROBOTICS LAB(XR開発)
- VRのご提案
フレアオリジナルさまが自社の高い技術力を使って仮想空間と現実空間を繋がり、私達人間の限界を突破し、ロボティクス活動を続けていくでしょう。

Address
〒389-0601
長野県埴科郡坂城町坂城9439-5
株式会社フレアオリジナル
HP
https://www.flareoriginal.com/
OS Version
今回使用するROS Versionはmelodicなので、ubuntu18.04を使用してください。
https://releases.ubuntu.com/18.04/
Reference Link
https://github.com/Dobot-Arm/CR_ROS/tree/master
https://github.com/Dobot-Arm/CR_ROS
Install ROS
下記のLinkからROSのインストール手順があります。
https://wiki.ros.org/Installation/Ubuntu
Clone the source code
下記のコマンドでSource CodeをCloneします。
| cd $HOME/catkin_ws/src git clone https://github.com/Dobot-Arm/CR5_ROS.git -b melodic-devel cd $HOME/catkin_ws |
building
Packagesをビルドします。
| catkin_make |
-j2 -l2 failed
最初にこのエラーが発生しました。どうやらlibpcapがインストールされていないせいで、コンパイル時に pcap.h ファイルが見つからないからです。
このコマンドを使ってlibpcapをします。
| sudo apt-get install git libpcap-dev |
https://github.com/Suoivy/ros_rslidar_robosense/issues/1
ImportError: No module named em
次のエラーはPythonモジュールの’em’と’empy’が同じ名前を使っているか、もしくはライブラリインストールされていないのか。
下記のコマンドでemパッケージを削除し、empy パッケージをインストールしましょう。
| pip3 uninstall em pip3 install empy |
https://answers.ros.org/question/257331/python-module-empy-missing-tutorials/
https://github.com/ros/genmsg/issues/63
AttributeError: ‘module’ object has no attribute ‘RAW_OPT’
empyパッケージをインストールしましたが、今度は’RAW_OPT’というattribute がというエラーが発生しました。 どうやらempyの最新バージョン(4.0)が、AttributeError: ‘module’ object has no attribute ‘RAW_OPT’という新しい問題を引き起こしたそうです。
なので、3.3.4のempyパッケージを入れ直します。
| pip uninstall em pip install empy==3.3.4 |
https://github.com/ros/genmsg/issues/63#issue-157815747
Activate Workspace
下記のコマンドでWorkspaceを有効にします。
| source $HOME/catkin_ws/devel/setup.bash |
Dobot Type
自分はCR5を使っていますので、下記のコマンドを実行します。
| echo “export DOBOT_TYPE=cr5” >> ~/.bashrc source ~/.bashrc |
rviz display Lauch
下記のコマンドでrviz Simulation環境を実行します。
| roslaunch dobot_description display.launch |
Missing joint_state_publisher_gui when l run display.launch
どうやらGUIパッケージとNON GUIパッケージは別々にインストールするみたいで、下記のコマンドでGUIパッケージをインストールしましょう。
| sudo apt update sudo apt install ros-melodic-joint-state-publisher-gui |
https://answers.ros.org/question/344992/missing-joint_state_publisher_gui-when-l-run-displaylaunch/
roslaunch: [ ] is neither a launch file in package [ ] nor is [ ] a launch file name
もしこのエラーが発生した場合、もう1回setup.bashを実行しましょう。
| source $HOME/catkin_ws/devel/setup.bash |
Result
Done!rvizが起動できました。
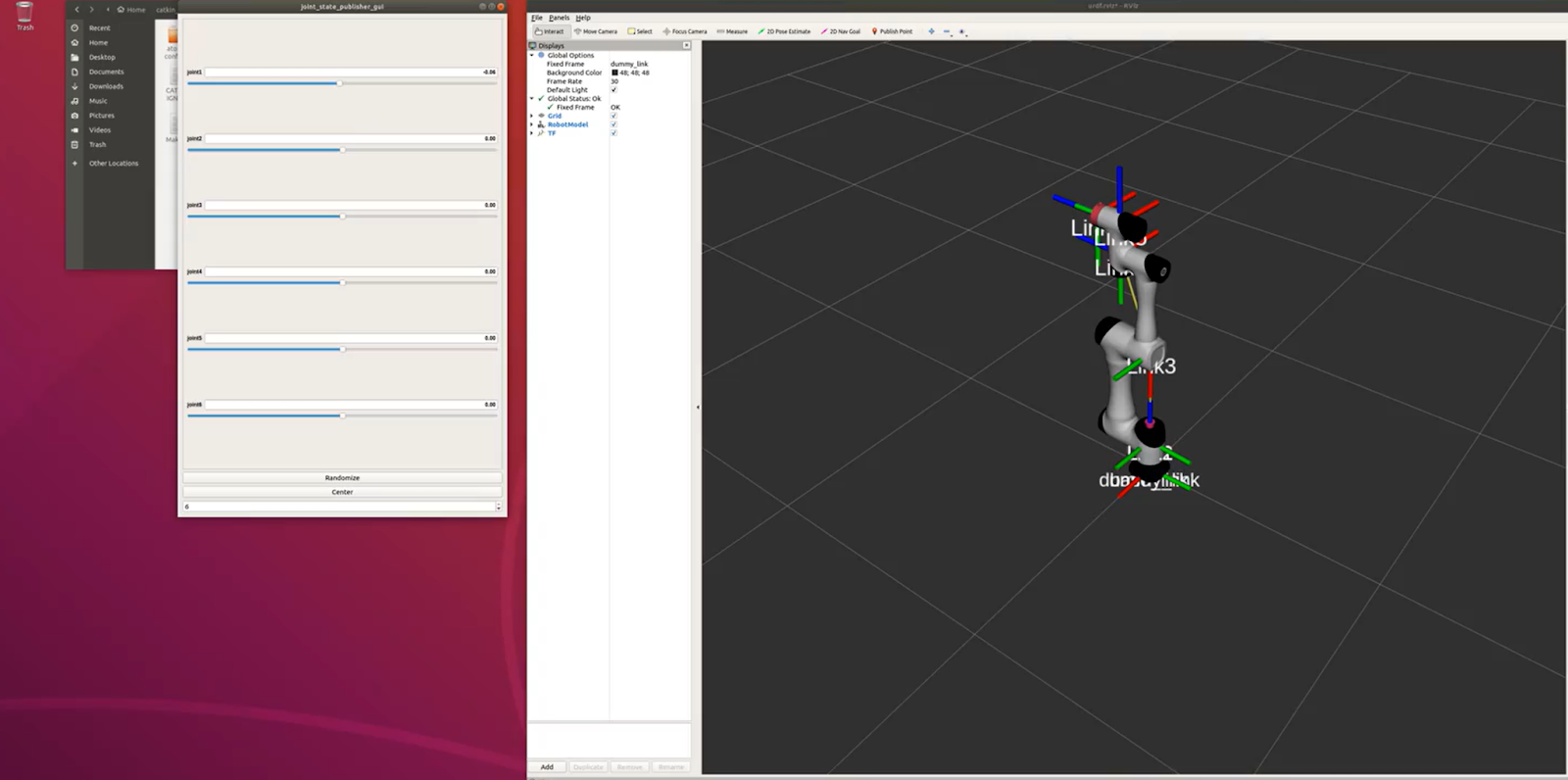
各軸も動きました!

moveit control Launch
次はmoveit Simulation環境を立ち上げるため、下記のコマンドを実行してください。
| roslaunch dobot_moveit demo.launch |
ERROR: cannot launch node of type [moveit_ros_move_group/move_group]: moveit_ros_move_group
こちらのエラーには ros-move-groupパッケージがないからです。下記のコマンドでros-melodic-moveiパッケージをインストールしましょう。
| sudo apt install ros-melodic-movei |
Result
Done!moveltがエラーなく起動できました!
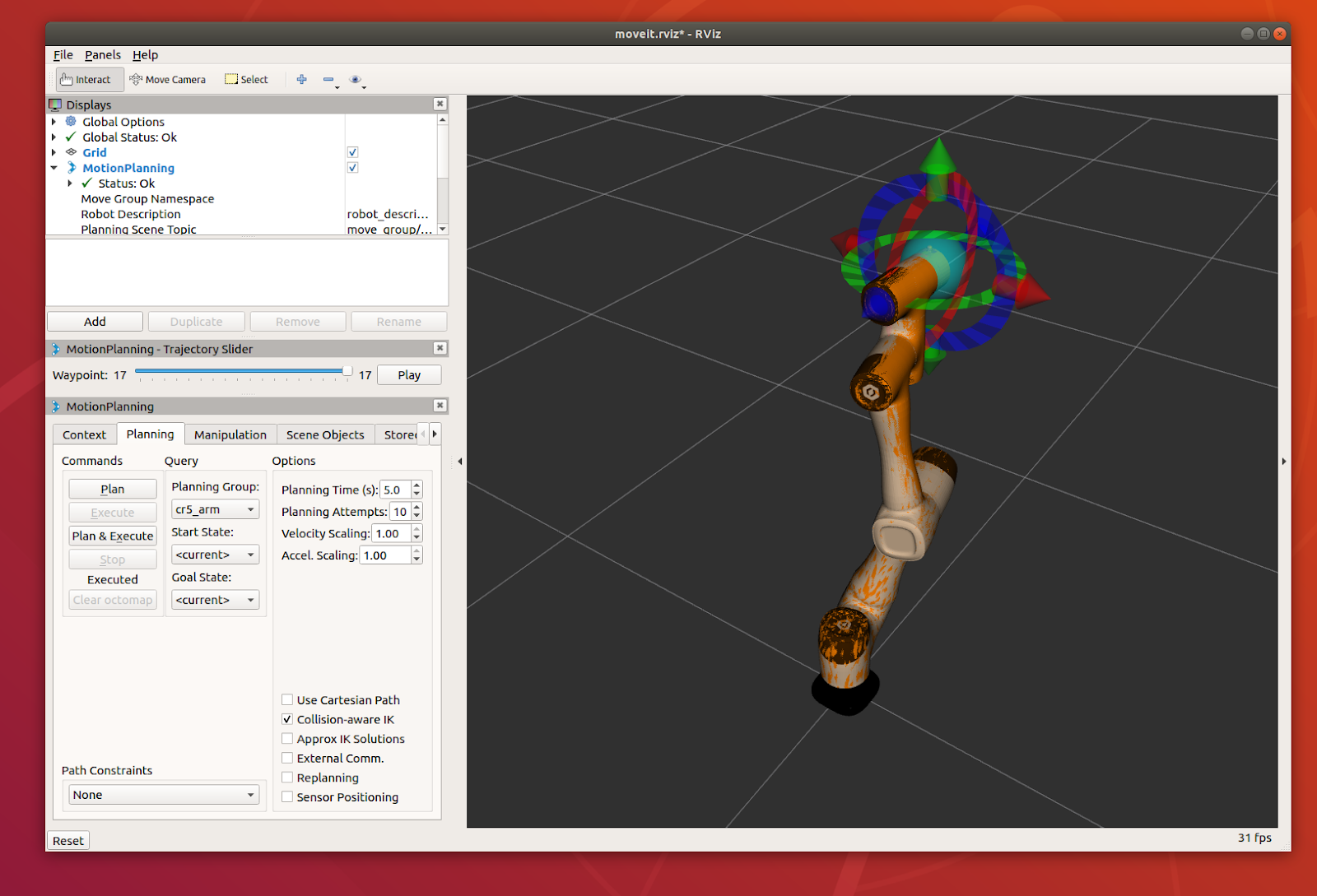
Motion Planningでも実行できました!
